thebranchofphysicsthattreatstheactionofforceon statics ...grupen/603/slides/dynamicsi.pdf · •...
TRANSCRIPT
Dynamics
The branch of physics that treats the action of force on
bodies in motion or at rest; kinetics, kinematics, and
statics, collectively. — Websters dictionary
Outline
• Conservation of Momentum
• Inertia Tensors - translation and rotation
• Dynamics
– Newton/Euler Dynamics
– Lagrangian Dynamics
– State Space Form - computed torque equation
• Applications:
– simulation;
– control - feedforward compensation;
– analysis - the acceleration ellipsoid.
1 Copyright c©2018 Roderic Grupen
Newton’s Laws
1. a particle will remain in a state of constant rectilinear motionunless acted on by an external force;
2. the time-rate-of-change in the momentum (mv) of the particleis proportional to the externally applied forces, F = d
dt(mv);
and
3. any force imposed on body A by body B is reciprocated by anequal and opposite reaction force on body B by body A.
Conservation of Momentum
Linear:
F =d
dt[mx] = mx
[N] =
[
kg m
sec2
]
Angular:
τ =d
dt
[
Jθ]
= Jθ
[Nm] =
[
kg m2
sec2
]
J is called the mass moment of inertia
2 Copyright c©2018 Roderic Grupen
Conservation of Momentum
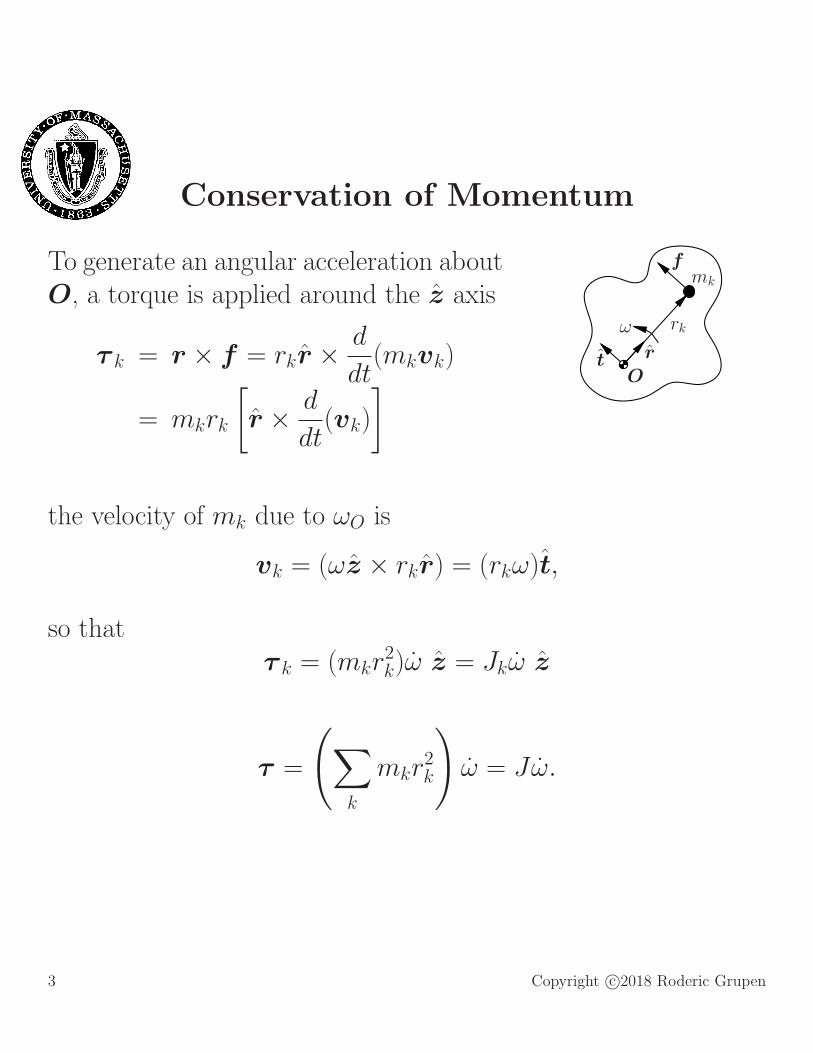
To generate an angular acceleration aboutO, a torque is applied around the z axis
τ k = r × f = rkr ×d
dt(mkvk)
= mkrk
[
r ×d
dt(vk)
]
t r
O
ω rk
fmk
the velocity of mk due to ωO is
vk = (ωz × rkr) = (rkω)t,
so thatτ k = (mkr
2k)ω z = Jkω z
τ =
(
∑
k
mkr2k
)
ω = Jω.
3 Copyright c©2018 Roderic Grupen
Conservation of Momentum
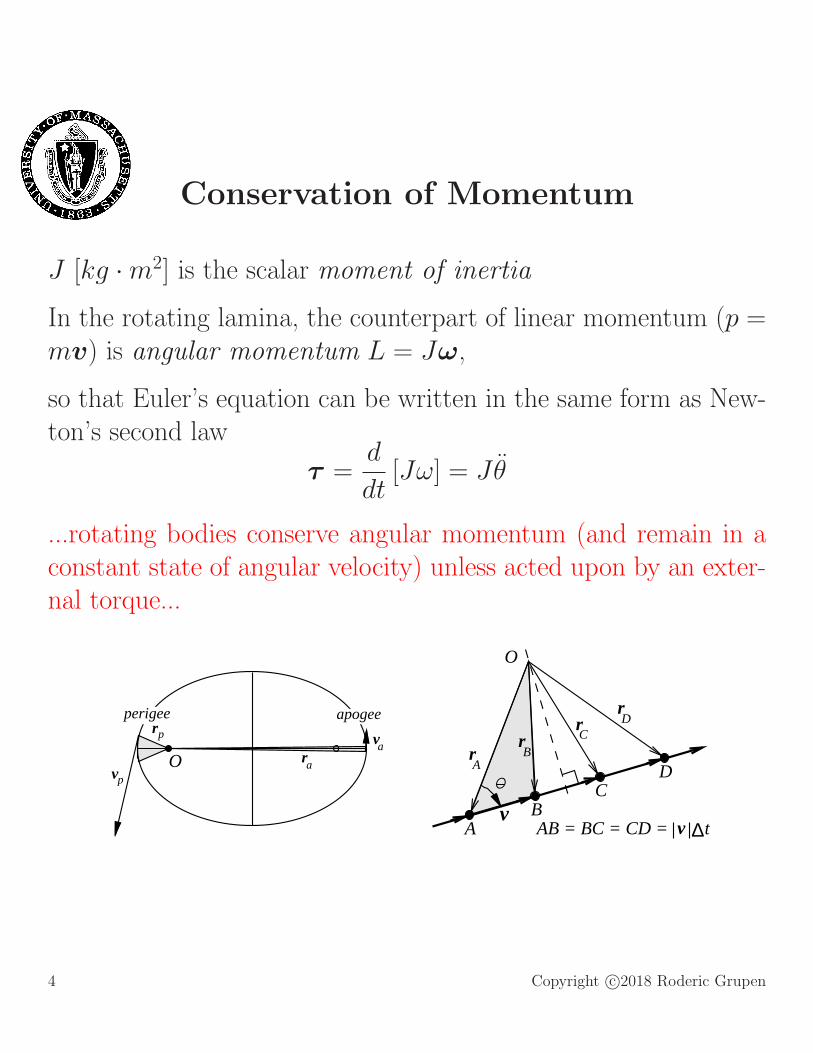
J [kg ·m2] is the scalar moment of inertia
In the rotating lamina, the counterpart of linear momentum (p =mv) is angular momentum L = Jω,
so that Euler’s equation can be written in the same form as New-ton’s second law
τ =d
dt[Jω] = Jθ
...rotating bodies conserve angular momentum (and remain in aconstant state of angular velocity) unless acted upon by an exter-nal torque...
O
BvA
rA
rB
CD
rC
rD
AB = BC = CD = t∆v
O
apogeeperigeerp
raav
pvO
4 Copyright c©2018 Roderic Grupen

Inertia Tensor
A
y
xz
axisa
A
y
xz
r
r
axisa
jlamina mk
Okt
r a I =
Ixx −Ixy −Ixz−Iyx Iyy −Iyz−Izx −Izy Izz
MASS MOMENTS MASS PRODUCTSOF INERTIA OF INERTIA
Ixx =∫ ∫ ∫
(y2 + z2)ρdv Ixy =∫ ∫ ∫
xyρdv
Iyy =∫ ∫ ∫
(x2 + z2)ρdv Ixz =∫ ∫ ∫
xzρdv
Izz =∫ ∫ ∫
(x2 + y2)ρdv Iyz =∫ ∫ ∫
yzρdv
5 Copyright c©2018 Roderic Grupen
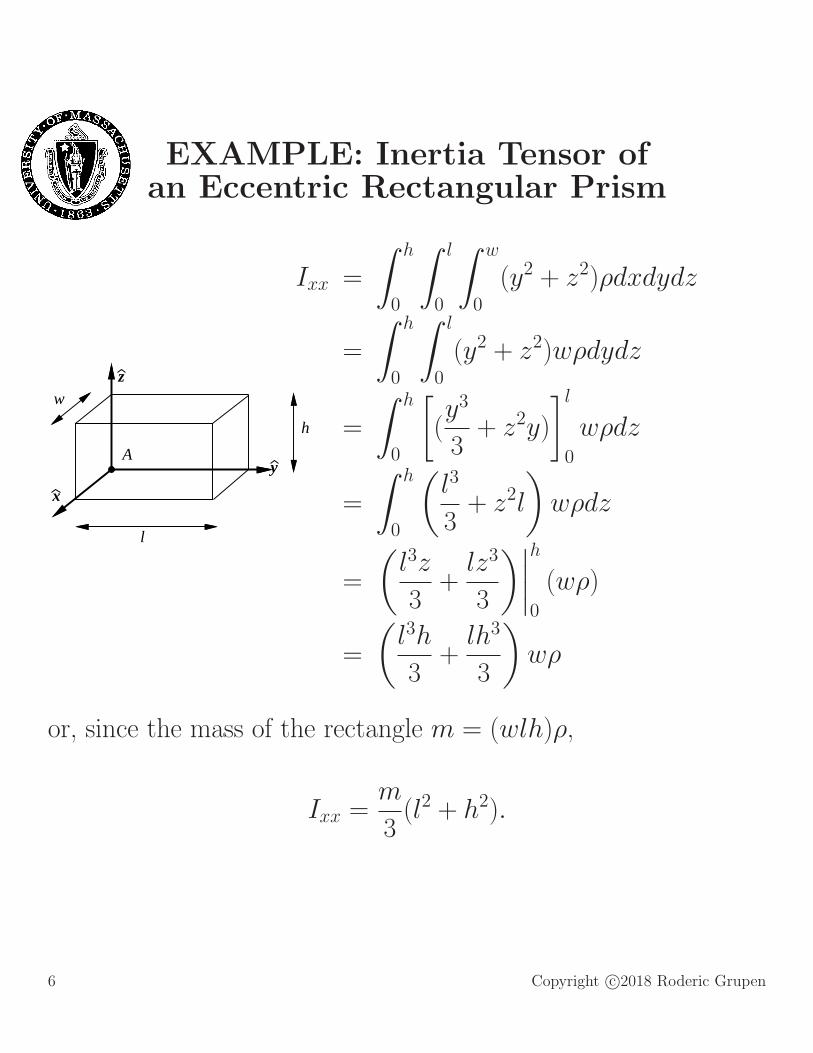
EXAMPLE: Inertia Tensor ofan Eccentric Rectangular Prism
x
y
z
l
h
w
A
Ixx =
∫ h
0
∫ l
0
∫ w
0
(y2 + z2)ρdxdydz
=
∫ h
0
∫ l
0
(y2 + z2)wρdydz
=
∫ h
0
[
(y3
3+ z2y)
]l
0
wρdz
=
∫ h
0
(
l3
3+ z2l
)
wρdz
=
(
l3z
3+
lz3
3
)∣
∣
∣
∣
h
0
(wρ)
=
(
l3h
3+
lh3
3
)
wρ
or, since the mass of the rectangle m = (wlh)ρ,
Ixx =m
3(l2 + h2).
6 Copyright c©2018 Roderic Grupen
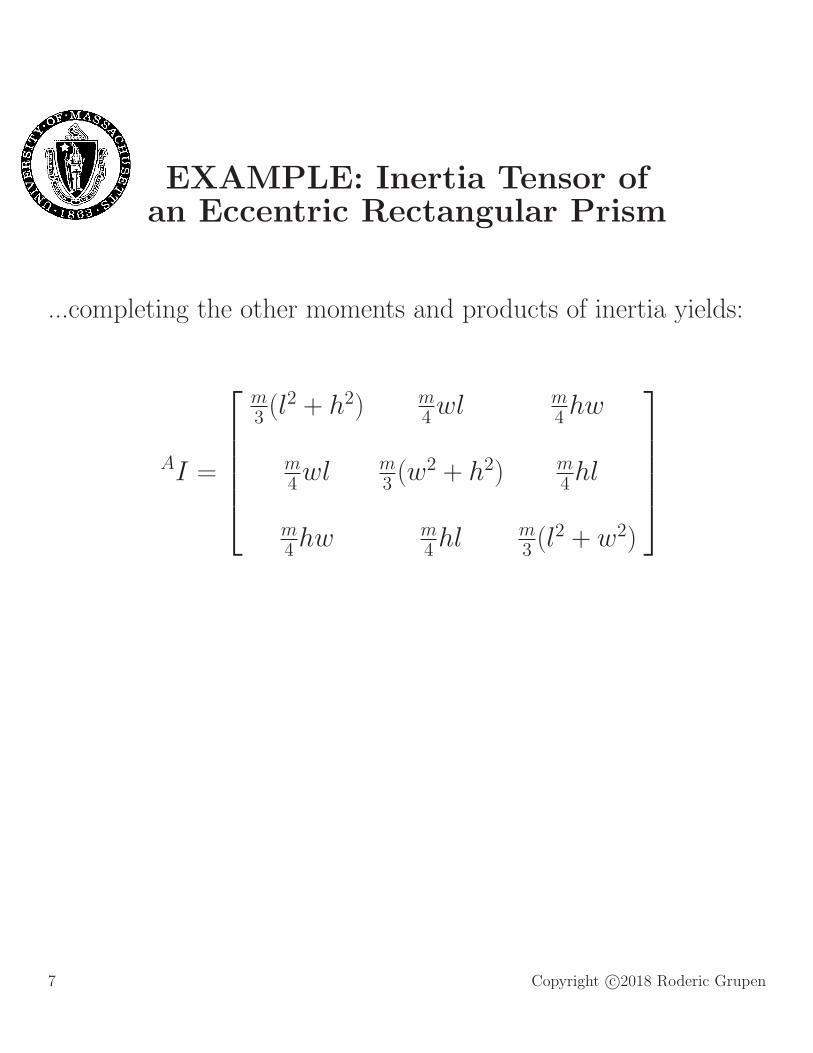
EXAMPLE: Inertia Tensor ofan Eccentric Rectangular Prism
...completing the other moments and products of inertia yields:
AI =
m3(l2 + h2) m
4wl m
4hw
m4wl m
3(w2 + h2) m
4hl
m4hw m
4hl m
3(l2 + w2)
7 Copyright c©2018 Roderic Grupen
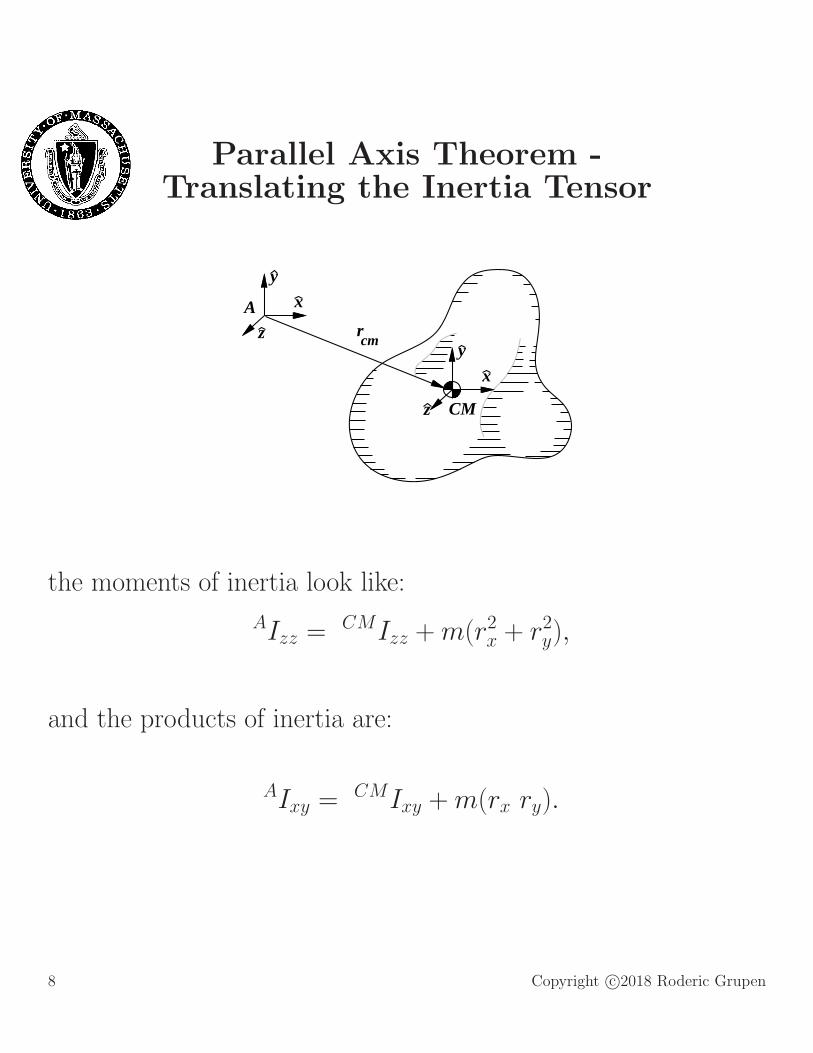
Parallel Axis Theorem -Translating the Inertia Tensor
y
x
z
A
y
x
z
CM
rcm
the moments of inertia look like:
AIzz =CMIzz +m(r2x + r2y),
and the products of inertia are:
AIxy =CMIxy +m(rx ry).
8 Copyright c©2018 Roderic Grupen
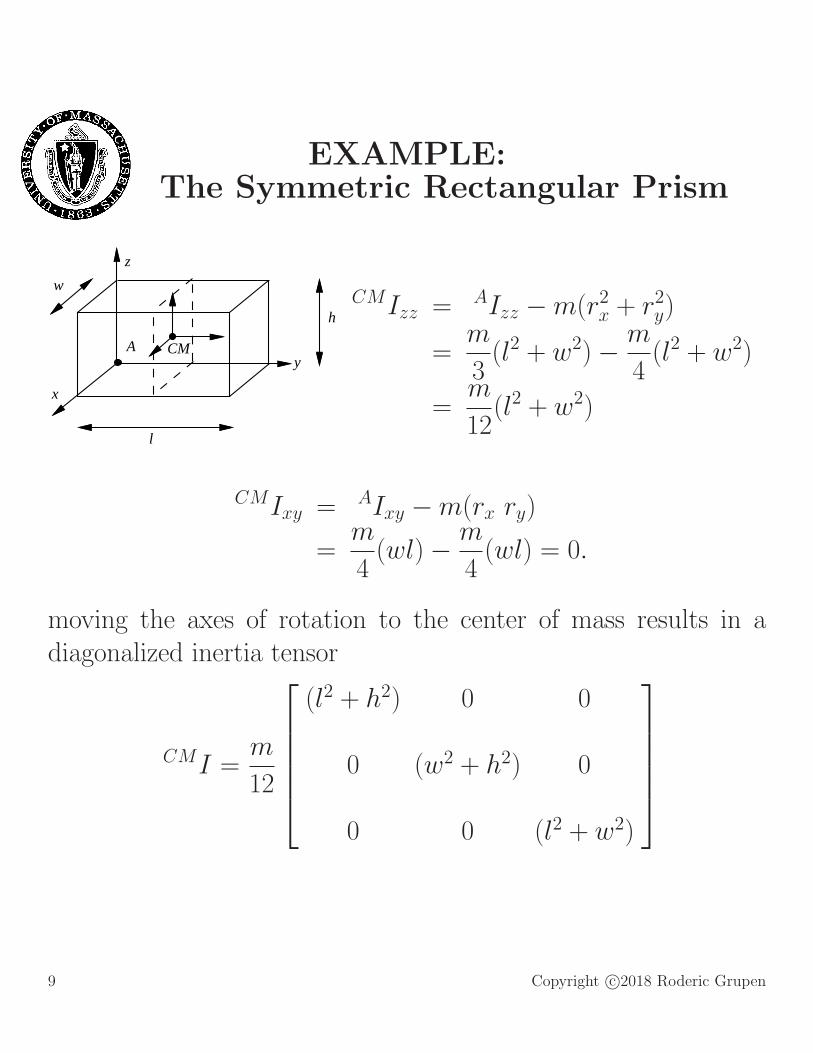
EXAMPLE:The Symmetric Rectangular Prism
x
y
z
l
h
w
A CM
CMIzz = AIzz −m(r2x + r2y)
=m
3(l2 + w2)−
m
4(l2 + w2)
=m
12(l2 + w2)
CMIxy = AIxy −m(rx ry)
=m
4(wl)−
m
4(wl) = 0.
moving the axes of rotation to the center of mass results in adiagonalized inertia tensor
CMI =m
12
(l2 + h2) 0 0
0 (w2 + h2) 0
0 0 (l2 + w2)
9 Copyright c©2018 Roderic Grupen
Rotating the Inertia Tensor
angular momentum L0 = I0ω about frame 0 in a vector quantitythat is conserved.
we can express it relative to frame 1 as
L1 = 1R0L0
or
I1ω1 = R(I0ω0)
= RI0RTRω0
and therefore,I1 = RI0R
T .
10 Copyright c©2018 Roderic Grupen

Rotating Coordinate Systems
Definition (Inertial Frame)the frame where the absolute state of motion iscompletely known
Let frame A be an inertial frame. Frame B has an absolute veloc-ity, ωB
B (written in terms of frame B coordinates).
rA(t) = ARB(t)rB(t)
rA(t) = ARB(t)d
dt[rB(t)] +
d
dt[ ARB(t) ]rB(t)
yx
z
ω x
ωy
ωz
ωz
ωy
ωz
ω x
ωy
ω x To evaluate the second term on the right,consider how the x, y, and z, basis vectorsfor frame B change by virtue of ωB.
˙x = ωzy −ωyz˙y = −ωzx −ωxz˙z = ωzy −ωyz
so
d
dt[ ARB(t) ]rB(t) =
0 ωz −ωy
−ωz 0 ωx
ωy −ωx 0
rxryrz
= ω × r
11 Copyright c©2018 Roderic Grupen

Rotating Coordinate Systems
Therefore,
rA(t) = ARB(t)d
dt[rB(t)] +
d
dt[ ARB(t) ]rB(t)
= ARB
[
rB + (ωBB × rB)
]
and, in fact, all vector quantities expressed in local frames thatare moving relative to an inertial frame are differentiated in thisway
d
dt[ARB(t)(·)B] = ARB
[
d
dt(·)B + (ωB × (·)B)
]
12 Copyright c©2018 Roderic Grupen
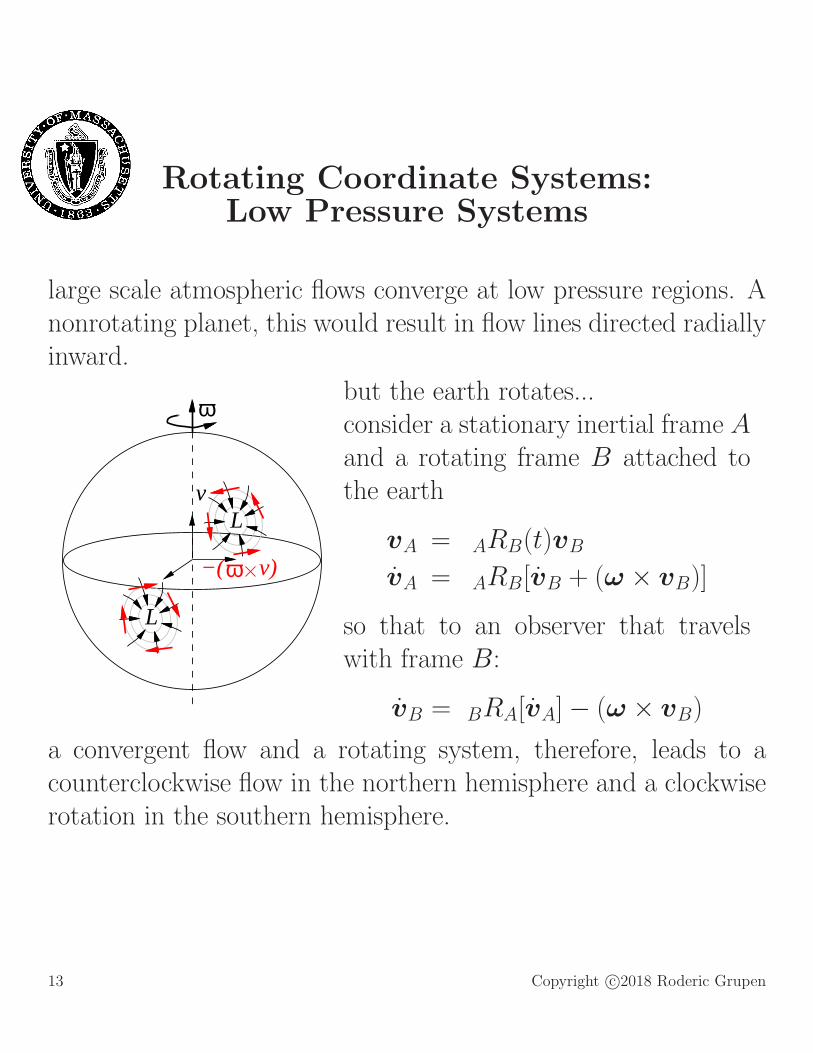
Rotating Coordinate Systems:Low Pressure Systems
large scale atmospheric flows converge at low pressure regions. Anonrotating planet, this would result in flow lines directed radiallyinward.
−( v)
L
ω
L
ω
v
but the earth rotates...consider a stationary inertial frame Aand a rotating frame B attached tothe earth
vA = ARB(t)vB
vA = ARB[vB + (ω × vB)]
so that to an observer that travelswith frame B:
vB = BRA[vA]− (ω × vB)
a convergent flow and a rotating system, therefore, leads to acounterclockwise flow in the northern hemisphere and a clockwiserotation in the southern hemisphere.
13 Copyright c©2018 Roderic Grupen
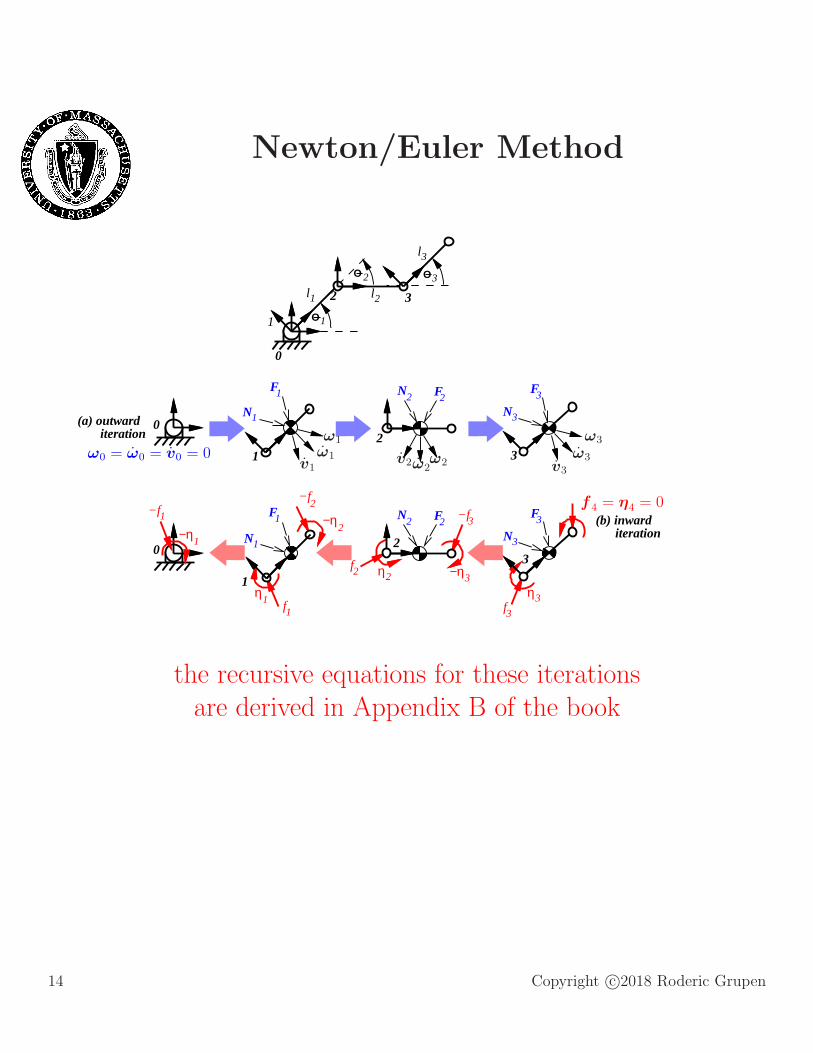
Newton/Euler Method
O1
0
1
l1
O 2
2 l2
O3
3
l3
1
N1
F1
2
F2N2
3
F3
N30(a) outward
iteration
(b) inward iteration
1−η
0
1−f2
−η2
−f
f1
η1
1
N1
F1 3−f
3−ηf2 η2
2
F2N2
η3f3
3
F3
N3
ω1
ω1v1
ω2ω2v2
ω3
ω3v3
ω0 = ω0 = v0 = 0
f 4 = η4 = 0
the recursive equations for these iterationsare derived in Appendix B of the book
14 Copyright c©2018 Roderic Grupen

Recursive Newton-Euler Equations
Outward Iterations
Angular Velocity: ω
REVOLUTE: i+1ωi+1 = i+1Riiωi + θi+1zi+1
PRISMATIC: i+1ωi+1 = i+1Riiωi
Angular Acceleration: ω
REVOLUTE: i+1ωi+1 = i+1Riiωi + ( i+1Ri
iωi × θi+1zi+1) + θi+1zi+1
PRISMATIC: i+1ωi+1 = i+1Riiωi
Linear Acceleration: v
REVOLUTE: i+1vi+1 = i+1Ri
[
ivi + ( iωi ×ipi+1) + ( iωi ×
iωi ×ipi+1)
]
PRISMATIC: i+1vi+1 = i+1Ri
[
ivi + dixi + 2( iωi × dixi) + ( iωi × dixi)
+ ( iωi ×iωi × dixi)
]
Linear Acceleration (center of mass): vcmi+1vcm,(i+1) = ( i+1ωi+1 ×
i+1pcm)
+ ( i+1ωi+1 ×i+1ωi+1 ×
i+1pcm) + i+1vi+1
Net Force: Fi+1Fi+1 = mi+1
i+1vcm i+1
Net Moment: Ni+1Ni+1 = Ii+1
i+1ωi+1 + ( i+1ωi+1 × Ii+1i+1ωi+1)
Inward Iterations
Inter-Link Forces:ifi =
iFi + iRi+1i+1fi+1
Inter-Link Moments:iηi =
iNi + iRi+1i+1ηi+1 + ( ipcm × iFi)
+ ( ipi+1 × iRi+1i+1fi+1)
15 Copyright c©2018 Roderic Grupen
The Computed Torque Equation
State Space Form
τ = M(θ)θ +V(θ θ) +G(θ) + F
external forces/torques:
• external forces
• friction
– viscous τ = −vθ
– coulomb τ = −c(sgn(θ))
– hybrid
16 Copyright c©2018 Roderic Grupen
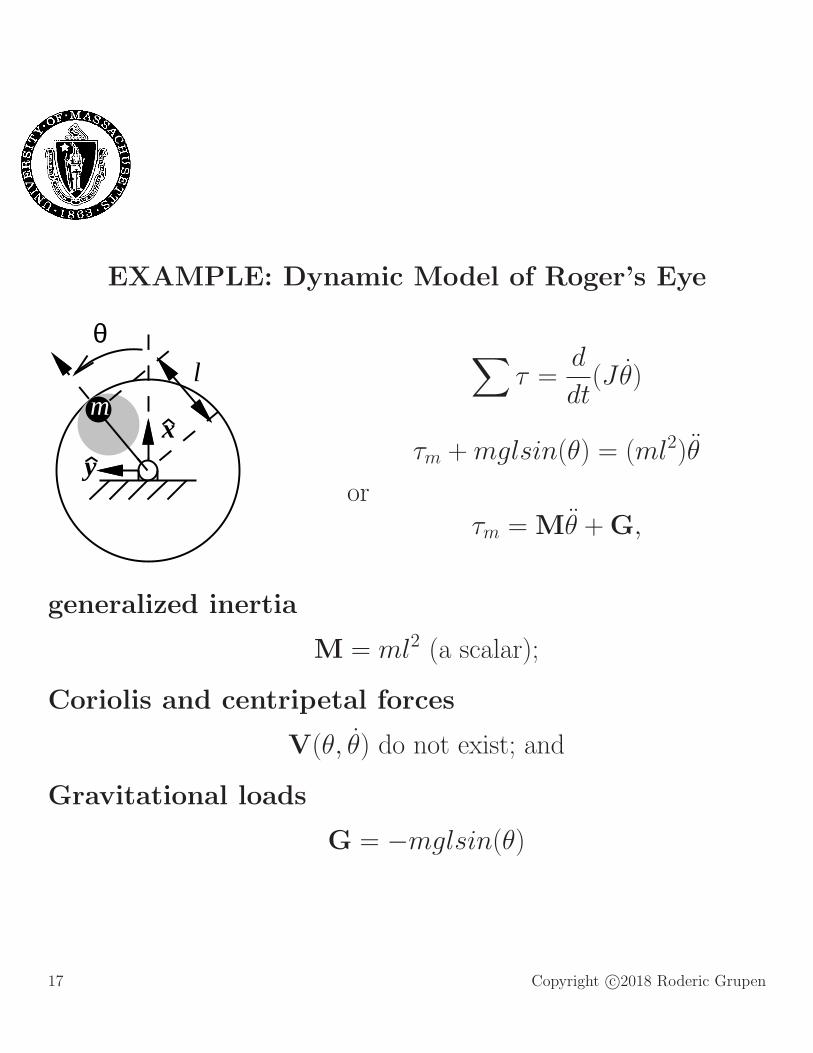
EXAMPLE: Dynamic Model of Roger’s Eye
xy
θl
m
∑
τ =d
dt(Jθ)
τm +mglsin(θ) = (ml2)θ
orτm = Mθ +G,
generalized inertia
M = ml2 (a scalar);
Coriolis and centripetal forces
V(θ, θ) do not exist; and
Gravitational loads
G = −mglsin(θ)
17 Copyright c©2018 Roderic Grupen

EXAMPLE: Dynamic Model of Roger’s Arm
l1
l2
01
y2
x2
y0
y1 x1
x0
20y3
x3m2
m1
M(θ) =
[
m2l22 + 2m2l1l2c2 + (m1 +m2)l
21 m2l
22 +m2l1l2c2
m2l22 +m2l1l2c2 m2l
22
]
V(θ, θ) =
[
−m2l1l2s2(θ22 + 2θ1θ2)
m2l1l2s2θ21
]
Nm
G(θ) =
[
−(m1 +m2)l1s1g −m2l2s12g
−m2l2s12g
]
Nm
18 Copyright c©2018 Roderic Grupen
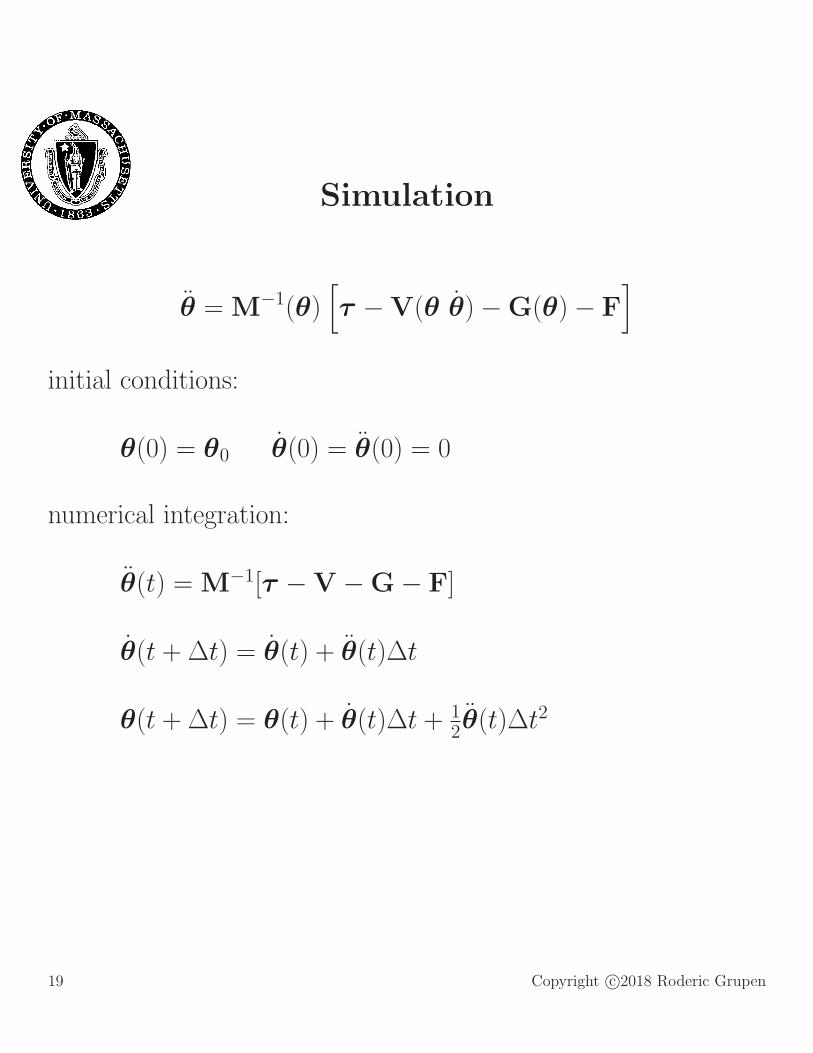
Simulation
θ = M−1(θ)[
τ −V(θ θ)−G(θ)− F]
initial conditions:
θ(0) = θ0 θ(0) = θ(0) = 0
numerical integration:
θ(t) = M−1[τ −V −G− F]
θ(t +∆t) = θ(t) + θ(t)∆t
θ(t +∆t) = θ(t) + θ(t)∆t + 12θ(t)∆t2
19 Copyright c©2018 Roderic Grupen
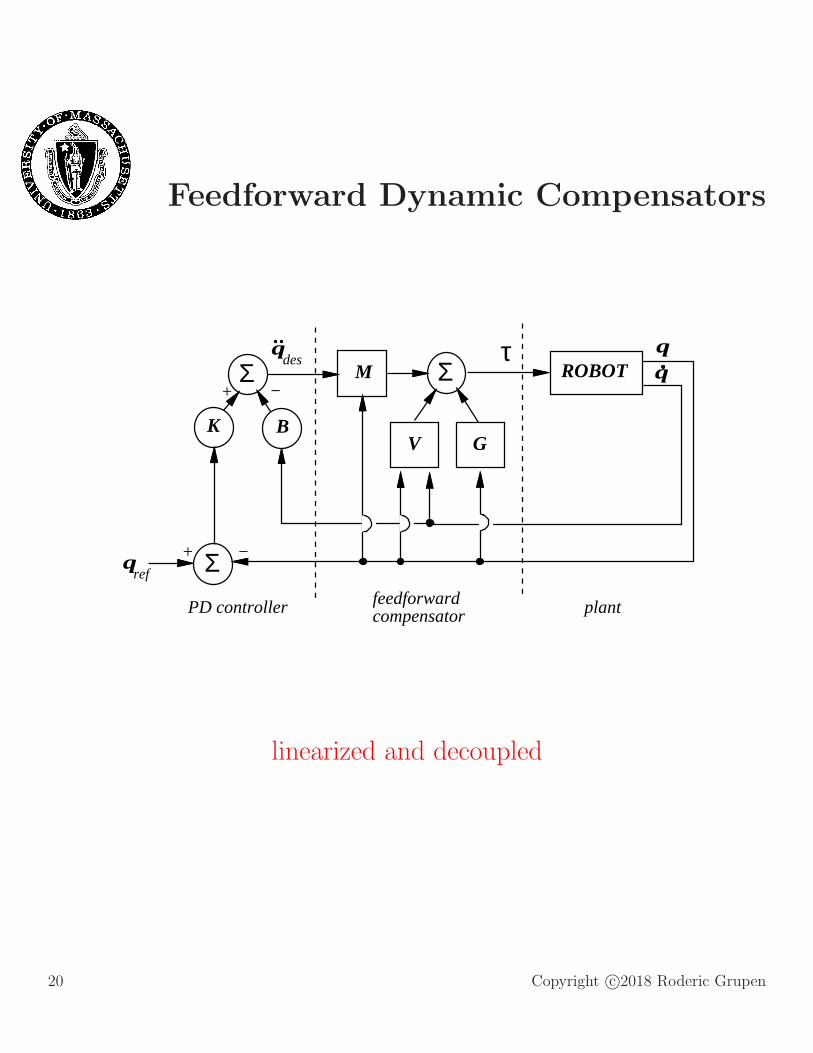
Feedforward Dynamic Compensators
Σ
Σ
Σ ROBOTqq
V G
M
feedforwardcompensator plant
qdes
ref
PD controller
+
+
−
τ
K B
−
q
linearized and decoupled
20 Copyright c©2018 Roderic Grupen
Generalized Inertia Ellipsoid
computed torque equation:
τ = Mθ +V(θ, θ) +G(θ)
if we assume that θ ≈ 0, and we ignore gravity
τ = Mθ
‖θ‖ ≤ 1
relative inertia—torque required to create a unit acceleration de-fined by the eigenvalues and eigenvectors of MMT
21 Copyright c©2018 Roderic Grupen
Acceleration Polytope
gravity, actuator performance, and the current state of motioninfluences the ability of a manipulator to generate accelerations
differentiating r = Jq,
r = J(q)q + J(q, q)q
= J[
M−1(τ −V −G)]
+ Jq
= JM−1τ + vvel + vgrav,
vvel = −JM−1V + Jq, and
vgrav = −JM−1G.
τ = L−1τ L = diag(τ limit1 , . . . , τ limit
n )
admissible torques constitute a unit hypercube ‖τ‖∞ ≤ 1
r = JM−1Lτ + vvel + vgrav
= JM−1Lτ + vbias.
maps the n-dimensional hypercube ‖τ‖∞ ≤ 1to the m-dimensional acceleration polytope
22 Copyright c©2018 Roderic Grupen
Dynamic Manipulability Ellipsoid
τ T τ = (r−vbias)T(
[
JM−1L]−1)T (
[
JM−1L]−1)
(r−vbias) ≤ 1
M and L are symmetric:
A−T = (A−1)T , A−2 = A−1A−1, and for symmetric matrices,AT = A.
(r − vbias)T[
J−TML−2MJ−1]
(r − vbias) ≤ 1,
so that
dynamic manipulability ellipsoid
(r − vbias)(r − vbias)T ∈
[
JM−TL2M−1JT]
dynamic-manipulability measure
κd(q, q) =√
det [J(MTM)−1JT ]
23 Copyright c©2018 Roderic Grupen

Conditioning Acceleration
y
x
y
x
x=0.5 m
x=0.3 m
y=−0.265 m y=−0.765 m
m1 = m2 = 0.2 kg, l1 = l2 = 0.25 m, τTτ ≤ 0.005 N 2m2.
black ellipsoids - unbiased dynamic manipulabilitygravity biased dynamic manipulabilitynormalized acceleration polytope with gravity bias
24 Copyright c©2018 Roderic Grupen