the roscoe manual - apps.dtic.mil · -dna 3964f-1-2 the roscoe manual volume 1-2: a simplified...
TRANSCRIPT
-DNA 3964F-1-2
THE ROSCOE MANUAL
Volume 1-2: A Simplified ROSCOE Input Scheme
James BaltesJoel Garbarino E LGeneral Research Corporation
P.O. Box 6770
Santa Barbara, California 93111
29 February 1980
Final Report for Period 9 November 1977-29 February 1980
CONTRACT No. DNA 001-78-C-0002 DTICAPPROVED FOR PUBLIC RELEASE; L
DISTRIBUTION UNLIMITED. JUL3
THIS WORK SPONSORED BY THE DEFENSE NUCLEAR AGENCY
UNDER RDT&E RMSS CODES B322074464 S99QAXHC06428 H2590D
AND B322075464 S99QAXHCO6432 H2590D.
Prepared for
DirectorADEFENSE NUCLEAR AGENCY
0 Washington, D. C. 20305
9 0
Destroy this report when it is no longerneeded. Do not return to sender.
PLEASE NOTIFY THE DEFENSE NUCLEAR AGENCY,ATTN: STII, WASHINGTON, D.C. 20305, IFYOUR ADDRESS IS INCORRECT, IF YOU WISH TOBE DELETED FROM THE DISTRIBUTION LIST, ORIF THE ADDRESSEE IS NO LONGER EMPLOYED BYYOUR ORGANIZATION.
UNCLASSIFIEDSECURITY CLASSIVICATION Or T.15 PAGE rI4Ph.n 11its, nr I
REP DOCUMENTATION PAGE BFRE OMPLERUTINORM*. <POT7 MrRkLL 2. GOVT ACCESSION NO. 3 RECIPIENT'S CATALOG NtilBER
j " NA 964F-l-T\7 - SqPPEOCOEE
&inal Rejpth or Period
E5. OECLASSWFCANov 77-29 GFeb 8T
IS mel .OISTRIBUTION SRATCOEN =Inpu Ste 0"0900-4
7Approved forRAC pulH reesRdsrbuinulmtd
i-.T
S SPEMENT RAR NIZOTS1 RO MEEMN RJETTS
SThis woen r k Rspons ordby thei efn s Nuclea Agnc und R K R T RM Soe
Santa0arbara S9QClifornia ad 320746 93111XHC06432 H2590D
DfeNuclear fet Radar3
Wsiultion, Satelit COuncaton
4'N IO IGA E C A EAA 0 ESN ifrn rn oi-bi f-0- 1 E U IYC AS(1ti p,
,0 /f_) AC I/ mu nvn .. a ~~aey*dIsryh iknn.
The t RO C E c m ue1o e i e i n d s e i i a l o b h l b r t r
nucloefr isubedc reions;: (4)istimationg variiuerdaradotclpoa
gaio errorBTIO sTTMNorce andtr (5) computdin g spec20 i ifi fo opheomeoogcldaaj
D1'0~ 7 1473EENAR NOESINO NVSSSOET NLSIID ~ _
This~~~EURT CLASposreSbIheDeeneNulCrA Ten ON Onde RT&E S C odes~.ntau
B3227444 S9QAHCO628 259D ad B3207464S99A\HC643 H290/
UNCLASSIFIED
SECUMITY CLASSIFICATION OF THIS PAGI(When Date Ent..wd)
\20. (Continued)
The ROSCOE documentation consists of a number of volumes, including usermanuals (Volumes 1 through 3), systems code descriptions (Volumes 4, 20,
and 21-1), code validation documents (Volumes 6 and 23), and phenomenologycode descriptions (all others). This document has been written as an
extension to the user manuals. It describes a simplified input scheme for
running a subset of ROSCOE problems. It is intended for the user who only
occasionally runs the code or would like to run a small problem.
a6
UNCLASSIFIED
5UCUIUTY CLaSSorICATION 03F THIS PAGIEI'WIA O.1t P,.,rVd
TABLE OF CONTENTS
Section
LIST OF TABLES 2
I INTRODUCTION 3
4
2 DESCRIPTION
2.1 Limitations 4
2.2 Input Variables 5
2.3 Example Input Sets 68
2.4 Outputs
3 ACCESSING THE INPUT SCHEME 16
3.1 Batch Jobs 16
3.2 Interactive Jobs 16
.17
APPENDIX A: USER REFERENCE TABLES
Accession For
, D T , T.
Av; 1 li Cores
D, t
' [. . 1
LIST OF TABLES
Table Page
1 ROSCOE Tabular Outputs 10
A.1 A Directory of Input Variables 18
A.2 Allowable Unit Names 29
A.3 Position Coordinate Specifications 31
A.4 Sample Control Card Deck for AFWL/NOS/BEl 33
A.5 Sample Procedure Permfile for Interactive Use 34
A.6 Time-Share Inputs 35
2
I INTRODUCTION
In the last few years, ROSCOE (Radar and Optical Systems Code with
Nuclear Effects) has been expanded to include simulations of satellite
communications and optical surveillance systems in a nuclear environment.
This expansion has led to considerably more complexity in the input re-
quirements.
WThile the ROSCOE input scheme was devised to handle these problems
(with no additional coding) and to allow the user complete flexibility
in structuring scenarios with multiple sensors, objects, and bursts, it
takes some time to learn bow to use the system. For the user who only
occasionally runs the code, or would like to run a small problem, a new
input scheme has been built for running a subset of ROSCOE problems with
a simple set of inputs.
The next section describes this new input scheme. Example input
set,; are shown for several different types of problems and the program
outputs are briefly discusseid. Section 3 describes how to access the
new scheme, for both batch and interactive jobs. Finally, to make this
paper useful as a reference guide, tables which describe the input options
have been placed in Appendix A.
p
3
2 DESCRIPTION
The new ROSCOE input scheme consists of a data deck with a pre-
selected set of input options, and a data preprocessor program which
inserts user-specified values for the options into the data deck. The
scheme, in general, does not sacrifice any of ROSCOE's input versatility,
since a new data deck with a different set of options can be generated
without writing new code.
2.1 LIMITATIONS
With the new scheme, as currently set up, the user can run nuclear
burst phenomenology problems alone, or nuclear effects on radar sur-
veillance and tracking of ballistic missiles, satellite communication,
or optical surveillance and tracking, subject to these constraints:
0 Up to five bursts are allowed, at altitudes up to 400 km -
positions, times, and burst properties are input.
0 Only one radar can be simulated in a run -- radar character-
istics and location are input.
0 Only one object trajectory can be simulated in a run
(although multiple objects can be spaced in tine on the tra-
jectory)--launch and impact points, impact time, and
reentry angle are input.
to Only one satellite communication system can be simulated in
a run (consisting of one ground transmitter, one ground
receiver, and one set of satellite-borne equipment which
receives and transmits) -- transmitter and receiver charac-
teristics and locations are input.
* Only one optical sensor can be simulated in a run -- sensor
characteristics and location are input.
0 Run times can be no more than 900 seconds after the last
burst.
4
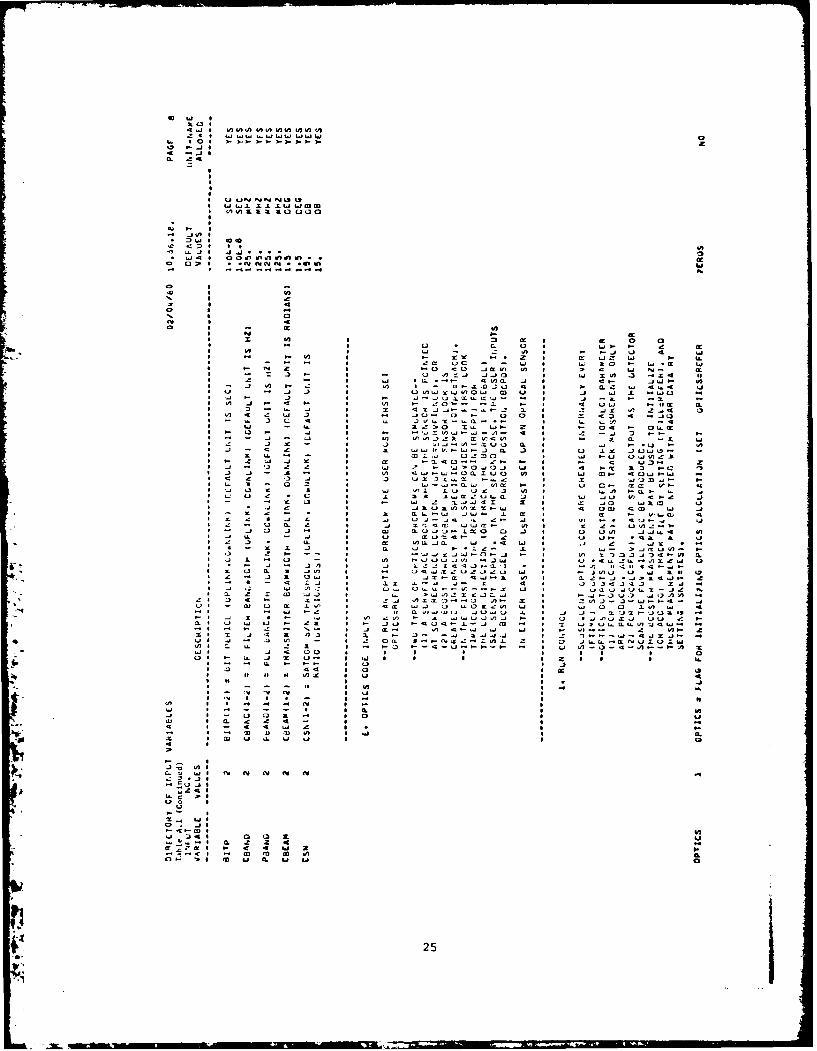
2.2 INPUT VARIABLES
Input variables in the new scheme are of five types:
" General Inputs. Variables related to a reference location
or time.
" Physics inputs. Variables required to simulate a burst and
print physics outputs.
" Radar Inputs. Variables required to simulate radar surveil-
lance or tracking performance.
* Satcom Inputs. Variables required to simulate a satellite
communication problem.
" Optics Inputs. Variables required to simulate optical sensor
surveillance or tracking performance.
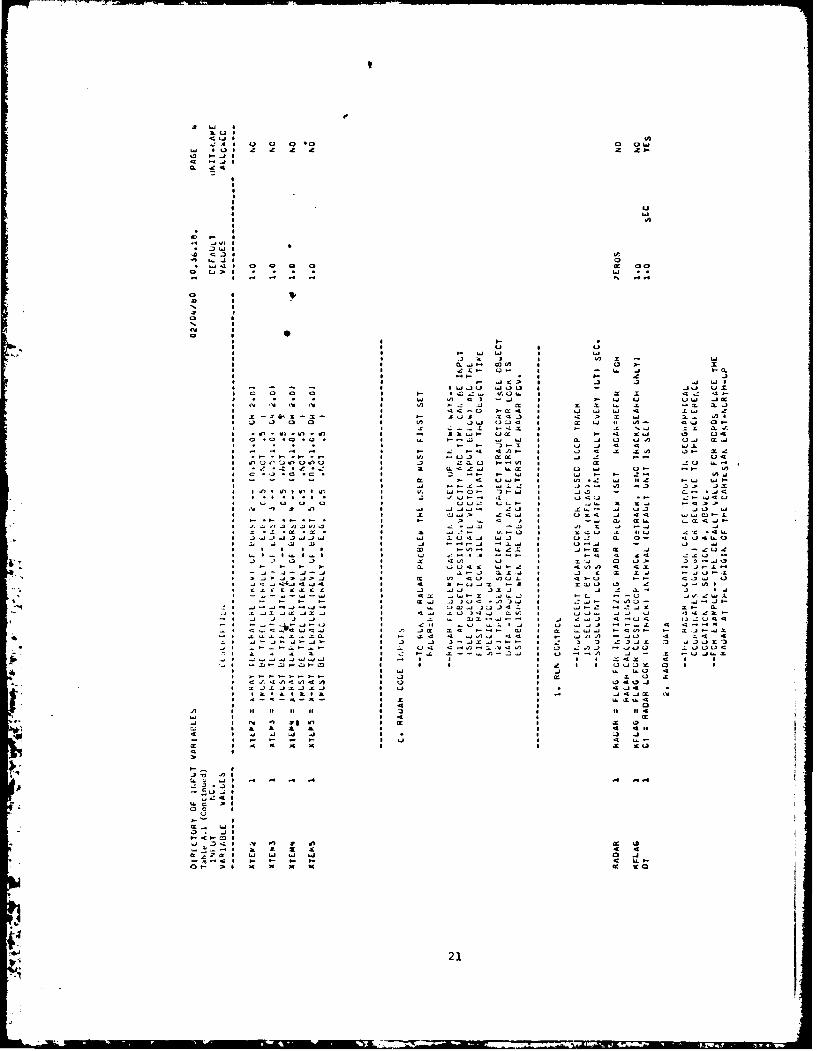
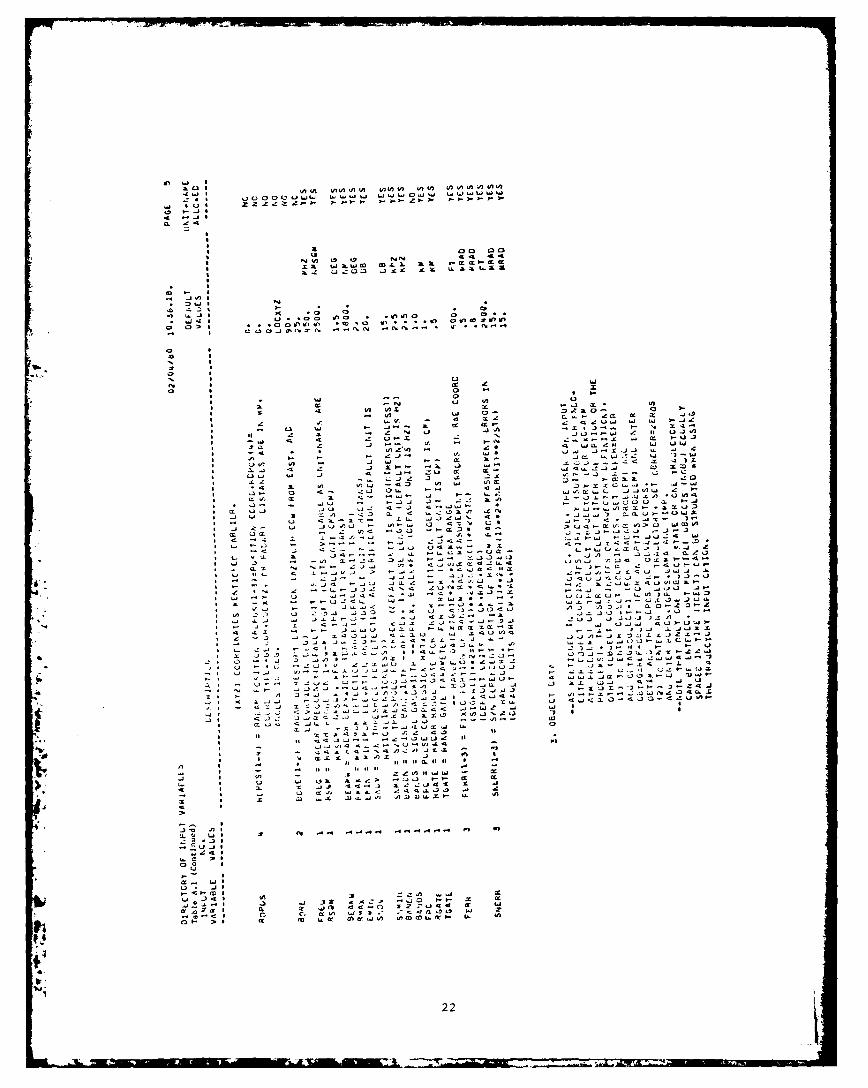
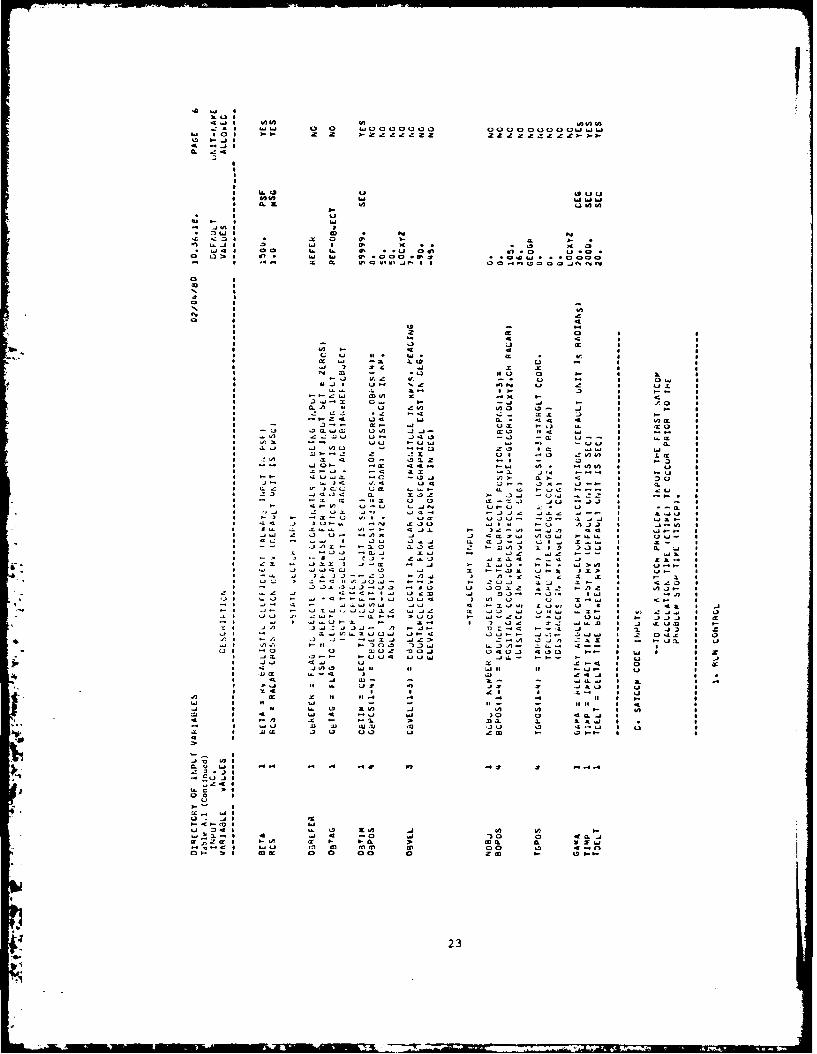
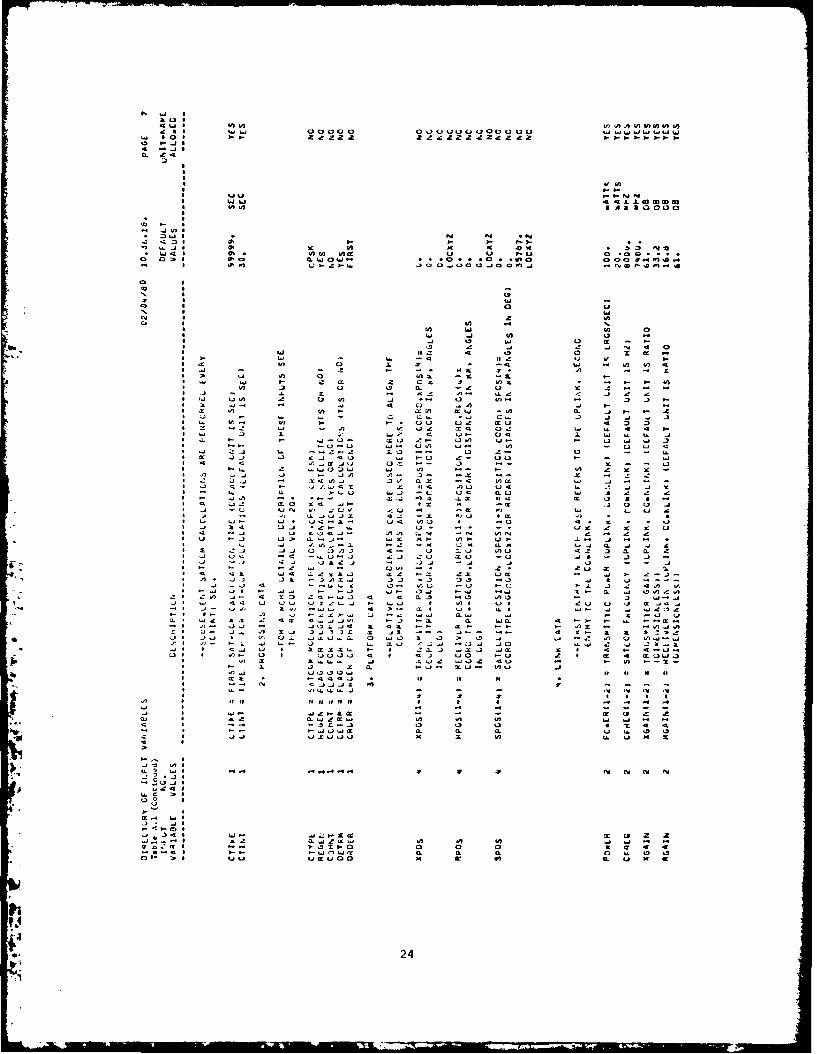
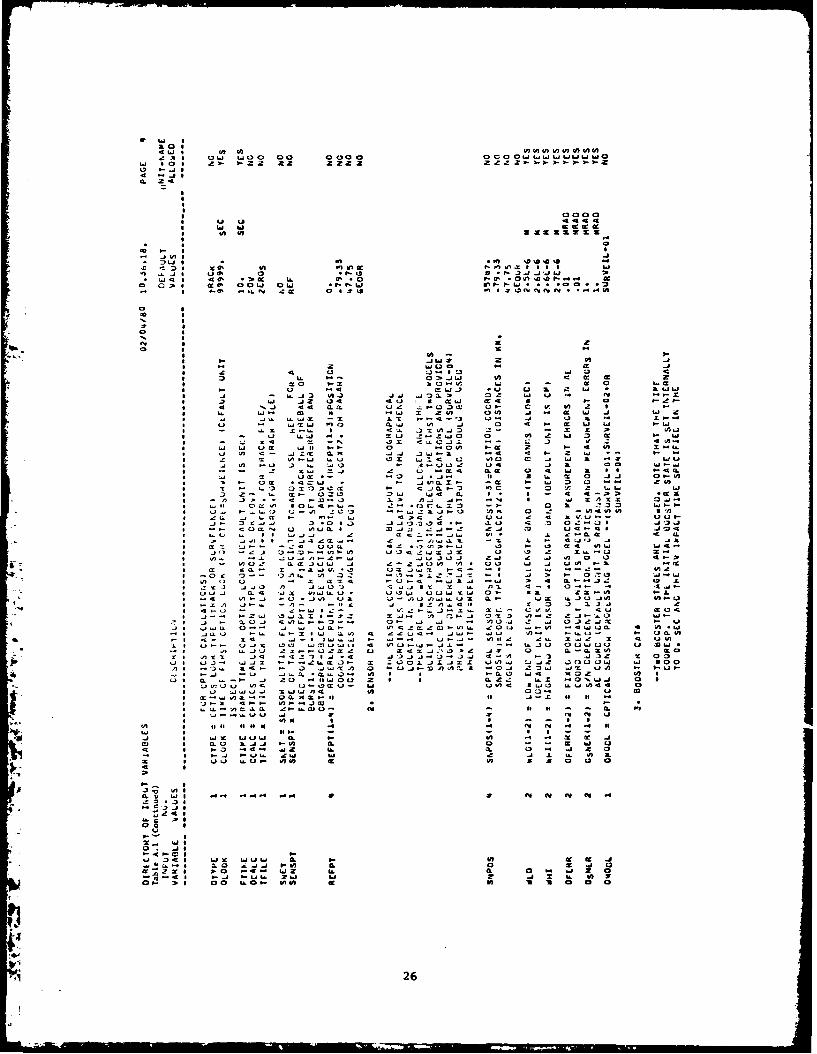
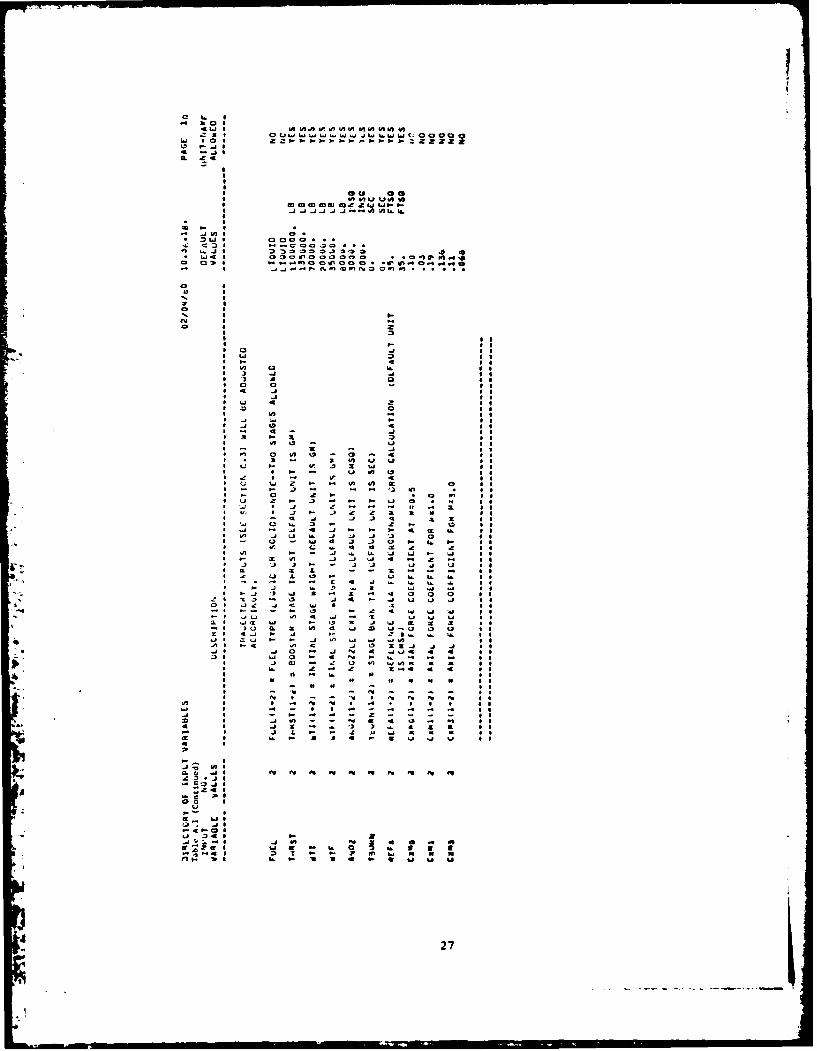
Table A.1 is a directory of input variables, divided into the five types
described above with notes to indicate the options available. For each
variable, the table gives its name, the number of values to be supplied
(more than one if the variable is a vector), a definition of the variable
including default units of measure, the default values that will be
assumed if you do not input the variable, and whether a unit name is
allowed for the variable. (Table A.2 shows the allowable unit names.)
It is important to note the default units given. If you input values
without unit names (for those variables allowing unit names), the de-
fault units are assumed. Note that the default values listed in Table
A.2 are given in their customary units, which are not always the same
as the internal default units.
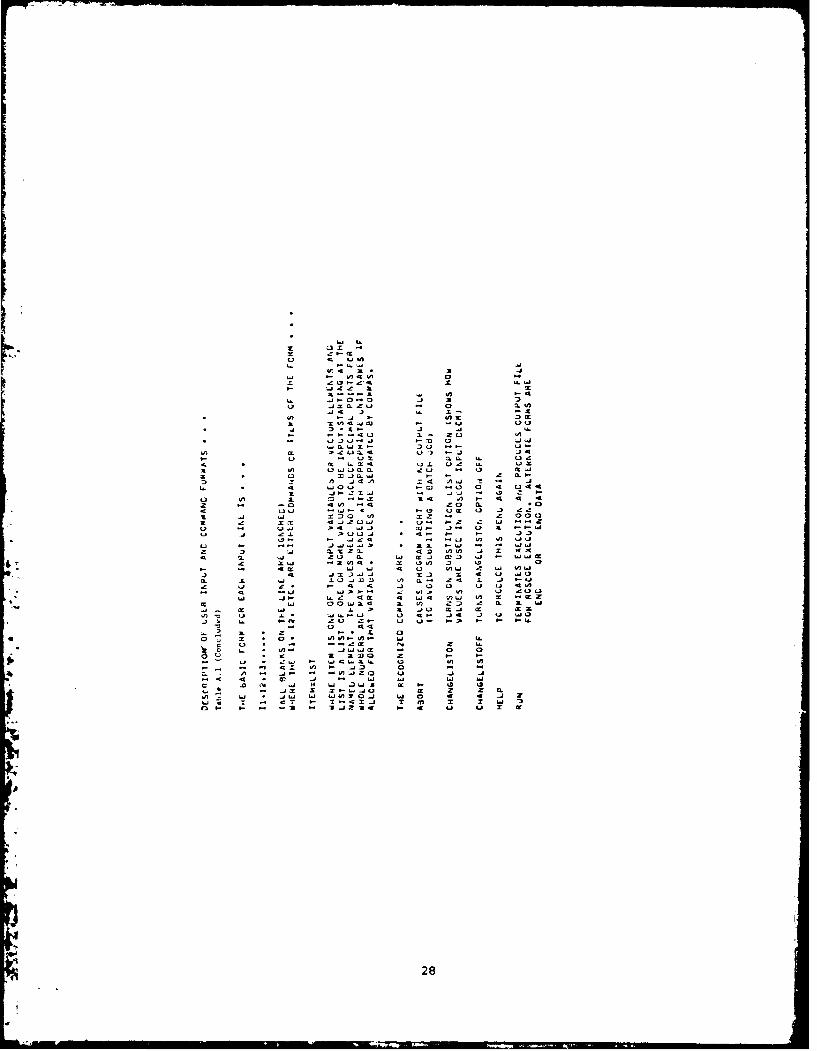
To run a case, follow the instructions given in Table A.1, and input
those variables you wish to change in the form: variable = value unit,
variable = value unit, etc. raid the input string with the command RUN
following the last variable input. For vectors, the format may be:
vector = value unit, value unit, etc., or vector(index) = value unit,
value unit, etc. In the first case, the values are assigned to vector(l),
1h
5
vector(2), etc,; in the second case, values are assigned to vector(index),
vector(index + 1), etc. This free format is essentially compatible with
the Fortran NAMELIST input scheme.
Note that positions can be specified by geographical coordinates
(GEOGR), or by Cartesian (LOCXYZ) or range-azimuth-elevation (RADAR)
coordinates relative to a reference location. The order of entry,
orientation, and units for these specifications are given in Table A.3
and Fig. A.l.
2.3 EXANfPLE INPUT SETS
2.3.1 Physics Problem
To run a simple physics problem consisting of a single burst with
the default characteristics and these assumptions:
0 Burst time = 0 s
0 Yield = 10 kT
0 Altitude = 40 km
* Output every 20 s until 120 s after burst
input:
TSTOP = 120, OTIME = 0, OTINT = 20, BTIMEI = 0,
BPOSI(3) = 40, YIELEl 1 10 KT, RUN
2.3.2 Radar Problem
To run a radar surveillance problem, where:
0 There is a single burst with the above properties.
* The radar is at the center of a local Cartesian coordinate
system (directly under the burst).
0 The radar is of the type described by the default parameters.
0 The object being viewed has a -30 ° reentry angle and is aimed
at the radar.
.4
4-i6
* The object is at 100 km altitude at time = 0 when the
burst occurs.
* Radar measurements are made once every second for 20 s.
input:
TSTOP = 20, BTIMEl = 0, BPOSI(3) = 40, YIELD1 = 10 KT,
OBTAG = 0BJECT-1, OBTIM = 0, OBPOS(2) = 173,
100 KM, 0BVEL(3) = -30, RADAR = REFER, RUN
2.3.3 Satcom Problem
'u. To run a satellite communication problem, where:
0 The ground transmitter and receiver are together, directly
beneath a satellite at synchronous altitude (the default
condition)
a The default link inputs are assumed
0 The default nuclear burst (I MT at 200 km altitude) occurs
10 s after the first communication
* The burst is displaced 200 km horizontally from the
line of sight
0 Communication calculations are made every 20 s, from
0 s to 100 s
input
TSTOP = 100, BTIMEl = 10, BPOSI(2) = 200, CTIME = 0,
CTINT = 20, RUN
2.3.4 Optics Problem
To run an optical sensor surveillance problem, where:
0 There is a single burst of 10 kt at 40 km altitude
, The sensor is at synchronous altitude
* The sensor is pointed at the burst
1. 7
- .
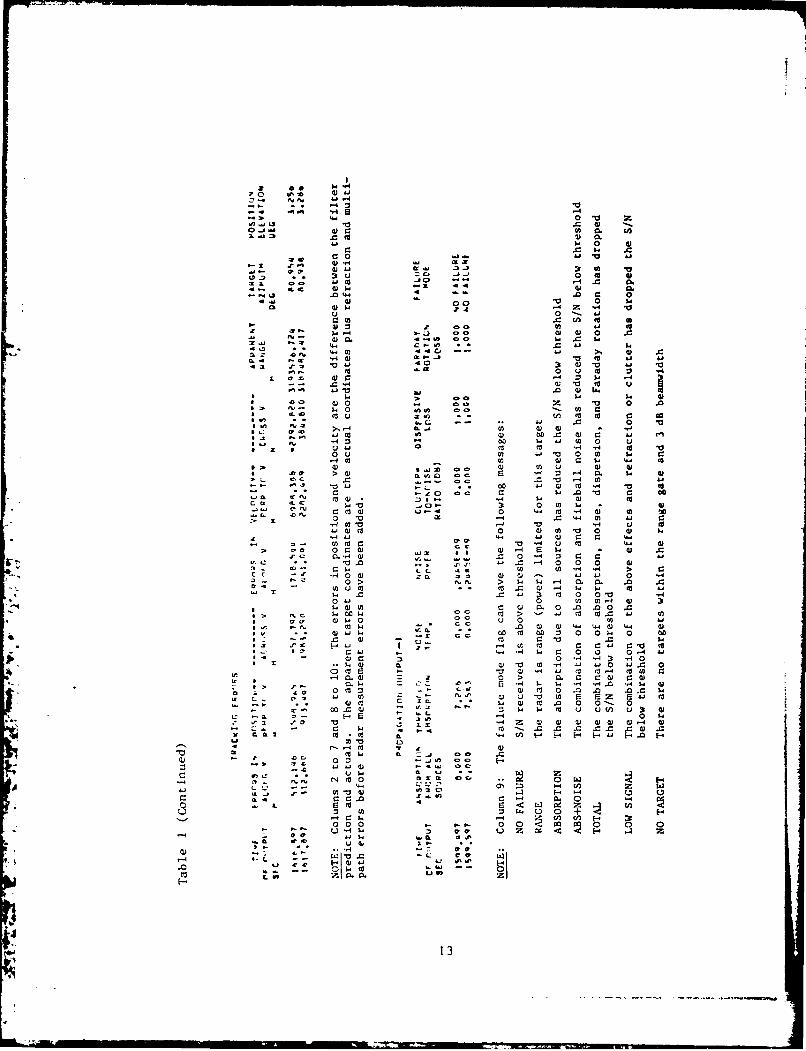
2.4.2 Tabular Outputs
There are seven phenomenology lists, five radar lists, two
satellite-communication lists, and three optics lists that may be output
at the conclusion of the run, depending on the type of simulation per-
formed.
The phenomenology lists include: burst parameters, common fire-
ball parameters (fireball set 1), two additional low-altitude fireball
parameter lists (fireball set 2 and fireball set 3), additional high-
altitude fireball parameters (fireball set 4), contained debris region
parameters, and beta tube parameters.
The radar lists include: trajectory output, track measurement
errors, track filter output, and two lists of propagation errors.
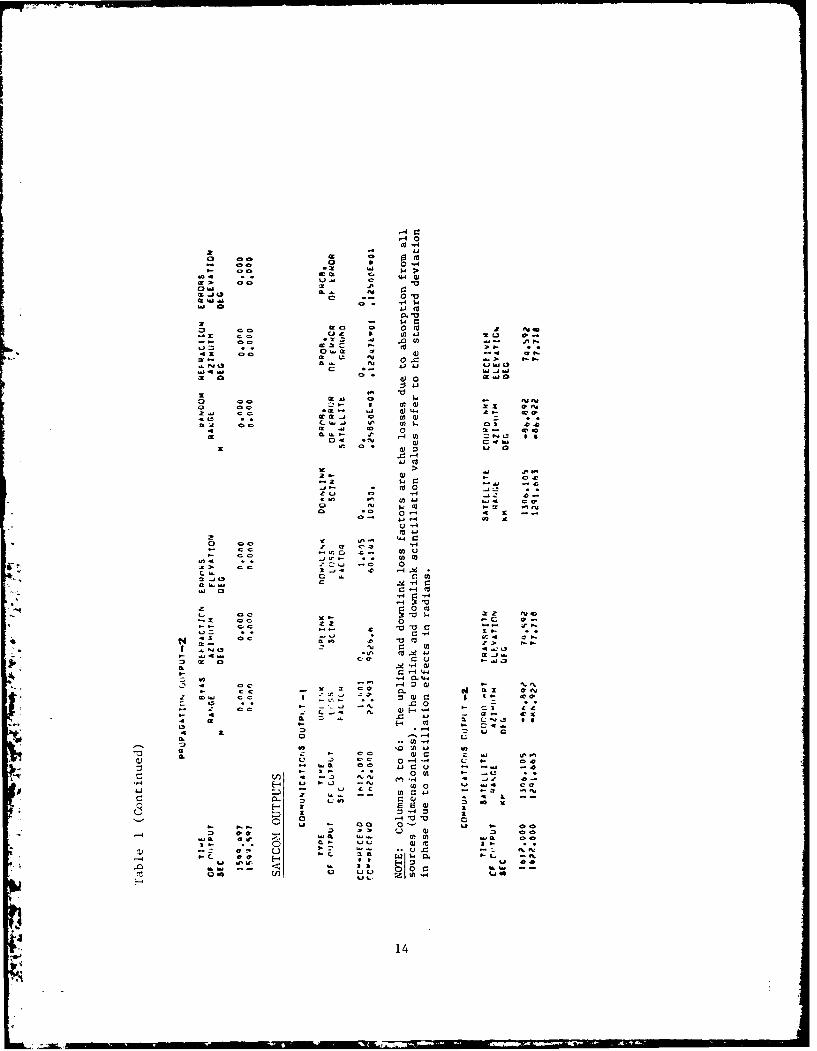
The satcom lists include: propagation and probability-of-error
data, and satellite position coordinates with respect to the ground-
terminal positions.
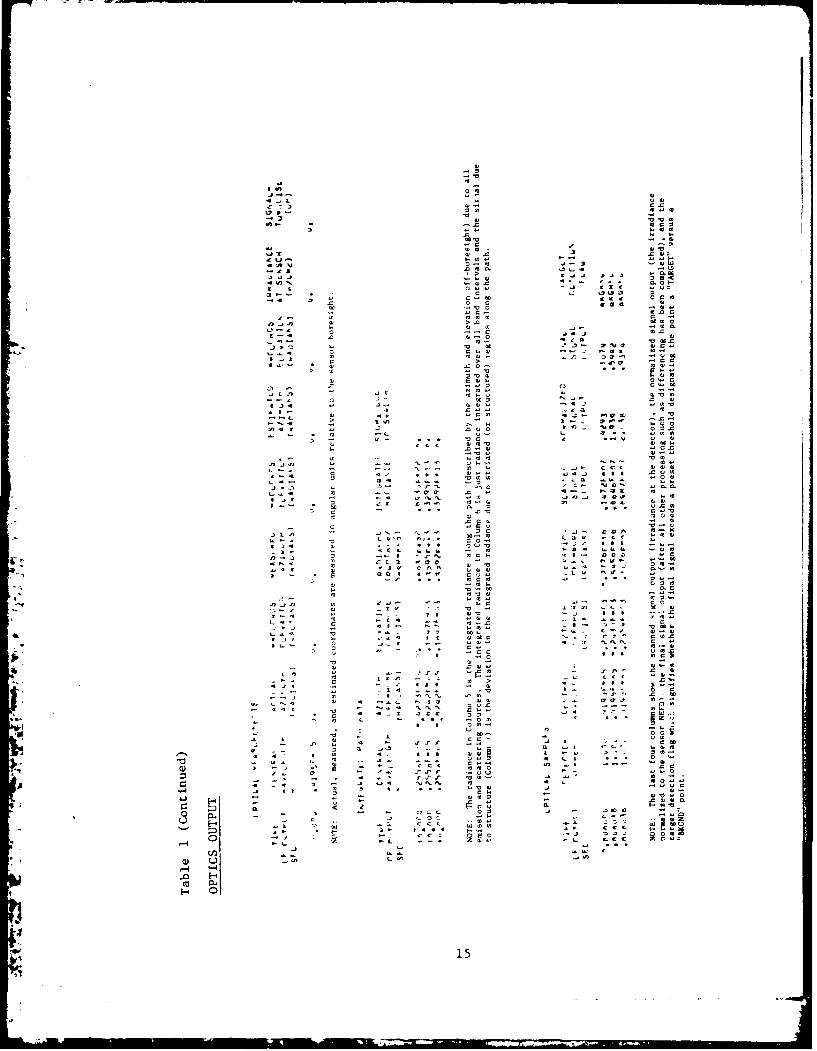
The optics output lists include: angle and signal-strength measure-
, 1ments for an optical tracking sensor application, the radiance along each
path treated within the field-of-view, and the data stream output pro-
duced by a scanning sensor.
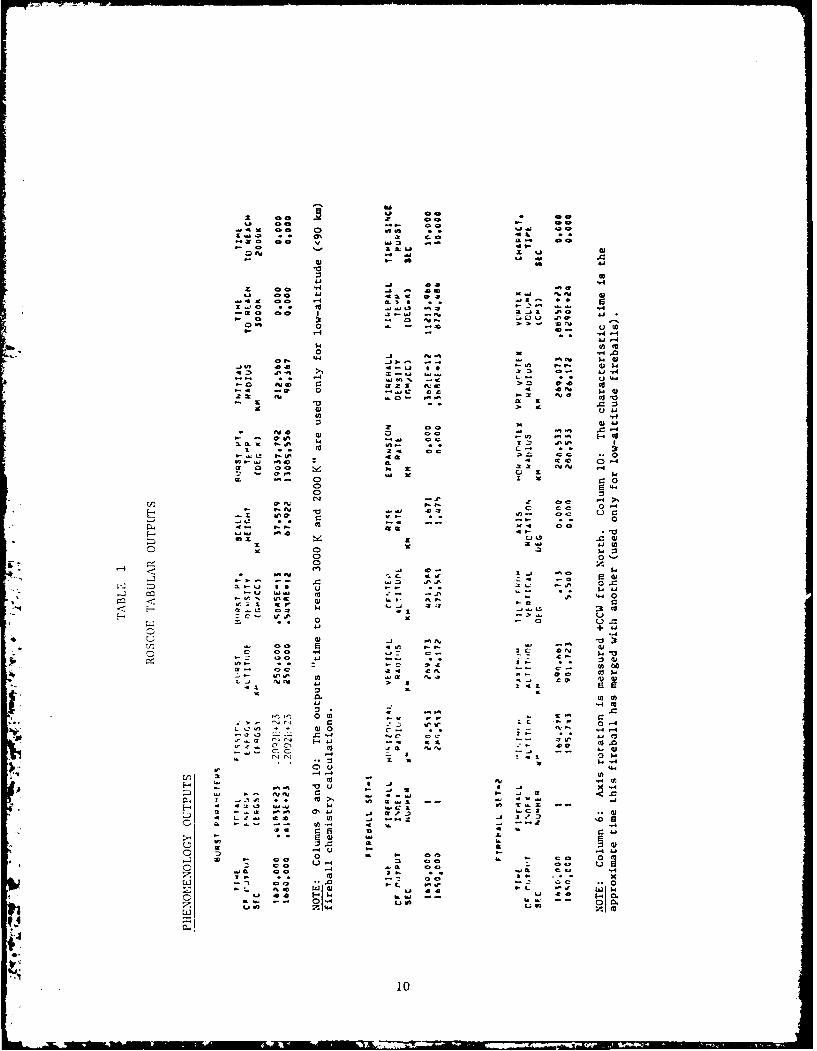
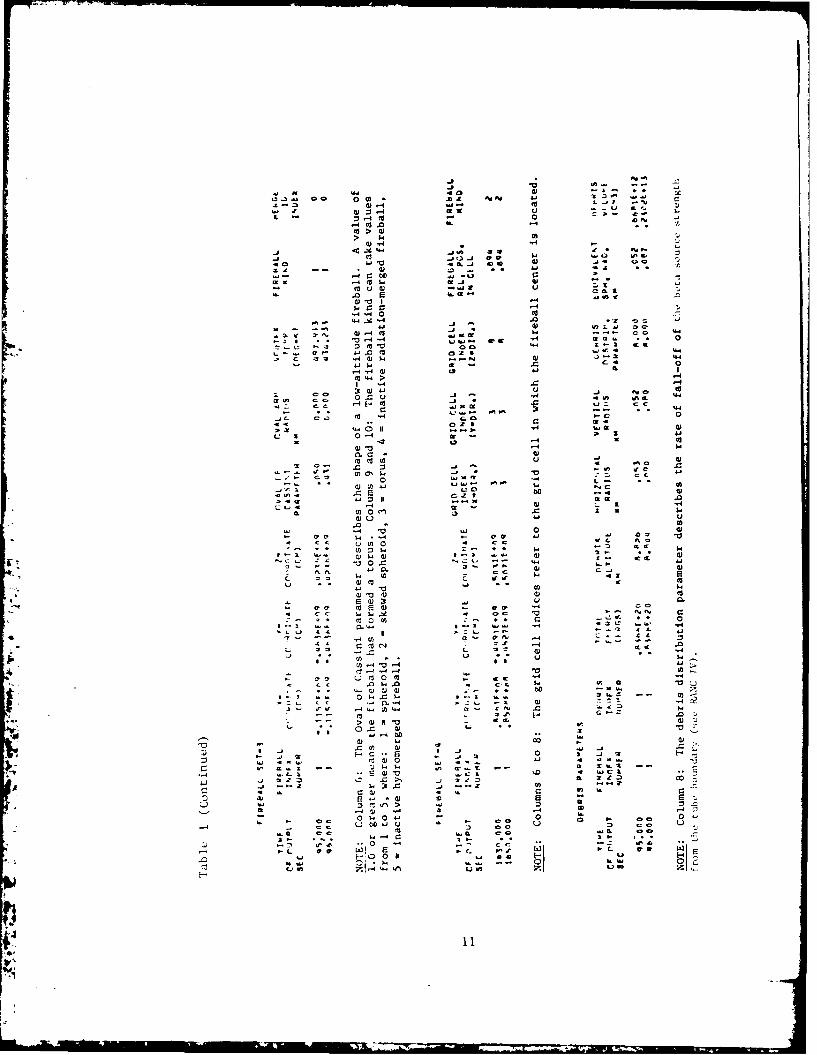
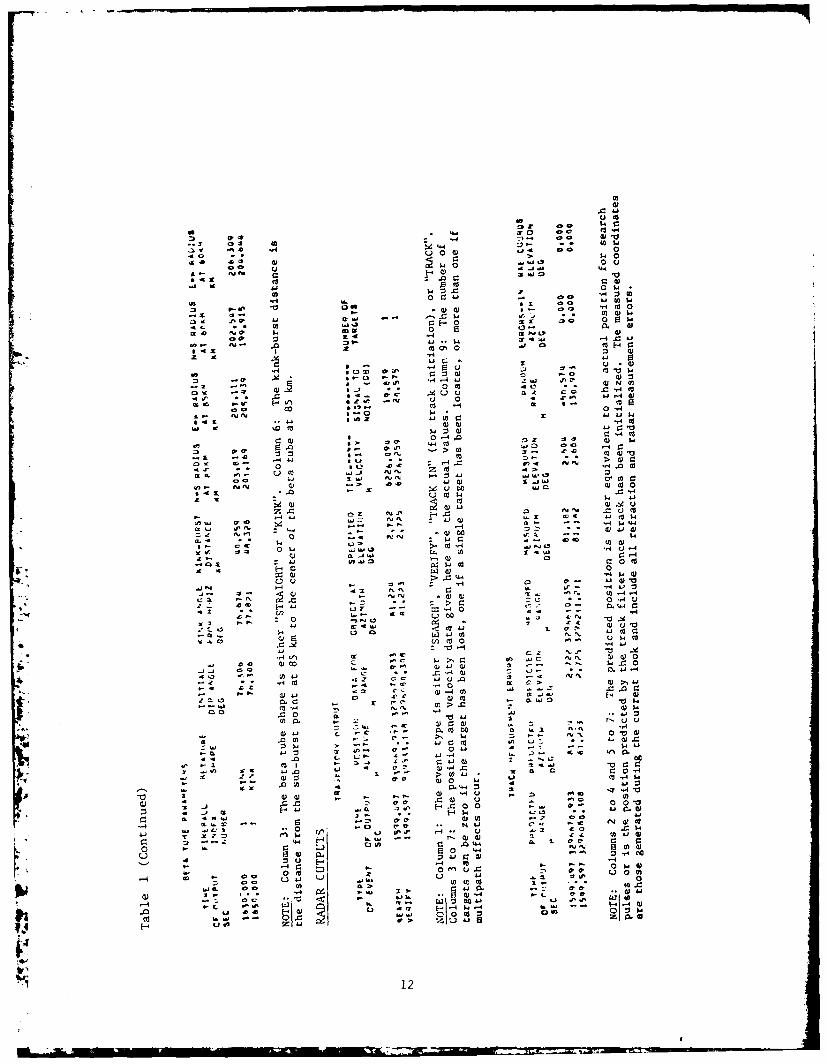
Table I shows a sma I I sample of each type of output. Some of
the column headings are self-explanatory, while others require additional.0 comment.
tj
I.
I 00 U 00*3
LU41 **c1 -
14N.4200V
owC -. 0
4.4 .3440 00 -z4
U 0 ~... .4~0CI~4 u C 411 4 - *
* * C .4. ,0 --20 0 . U ~ .2 i
-~~3 C;- ~ ~ 3 .4 ~ -
4t t-u r- C: .404.4 S ~0
4~~ ~~~~ .f 4c.4t* (.4-
CD
*~ If0 CC~4
Cu~~V ccC ~c .
4) 04a oo r V3
a -- oI NVs
o 544
o
H 0 1.14.4 . 0 0-c c.441 4444 v~. - .i
z cc
01
13 -1 Z.. co 1 fm- 00 0U v 4j AA ~ J
4 CO
014 '-4 0 I
40~~~~ 40.J ~ 0 A 0
-IL -_0 .. j 'o-. ~~I .10 U
-4. CC w
010 CE Cal a
31 IC w 44,-4d 01
,. 140 a) w" cC '44
s$ 4 , g ' 0
.44 w C--.60 4
144 > -
0 cc u4-0 V) L4 Cc CC 1*.- 44
-.1 1~ 01
010 '4 $..
CL 0 4)A -
01 ~c 01
.C0 E. U04
C- .~,4 0U00
w* 44 v~ C. 40Z
I-'~~~ ILc~ ~ 40
Cl CC4 640 C0
3- 0. 0.4.
m0 010 0~. 011~ .4 Li L
-4 C 00 0001- ao 4
ru. .4
CO -4 0 0~
C~ 00.00* Cw
w -- c1 -
CCC
mm m
0 -0 0 0)
Sj Z 01 .i
4.. 4 ~ -0~ 6 0 1 .4 4 H
4
TR 0 41
*.* 00 w 1.- 0a~ 4D O w r.4 @0 A0
400
(4 o o
- 64 - 00
or~
lp. '- .63
341 1 04'
-A 4 4 41
~~V) tos -44 (P4 r=d V
co 0-4 01a. .0 Z0 -, 00
(4 --4 44I34.0 0 4 4.0 40
001 CO -0 U'4',.-~~ >~n Co X-. 4 -W .4Uo
*4 0 .0 C 4 d 4
-- u 44.4
4) V W~
04 N N 43 ., -4;- CS
w. 4flU a 00t~ s H0
-.U>6S4 'r .4 &
t ' g v 0 CLwC
'Ufl W, W31~~L To( C.o- '4
43 - -4>
U~~ U).- a4 di a ~, a 0 -,,,
a) " I0- -
0 >Ji ''
404 -I Q)'. 0.Li.-
00 44 "ax 40, 0 -
(40 Le -4.4 ft It
1, -4 r.- ' 0( ~ -wo 0 to 0 u.-- -u 0 ~
CL ". 0(p . 04 "T' L4 ~ i
u~0 Aiaj.. 0 J, a,L . 0 4 1 o * s-i
o, 0i 2- z4 cu 44 k
ca aW CuAw1I-i .0.
4 .. '~ H~ -~ 4..12
Ia.
C: 0~ -0
:R. U)
-a3U0
. w c 0U 0 f
aC 00-z~~0 Z1* 45~ .1
~0 --- 0 1 4a, U.c 45. *n co IA
4 . ;5 - 0 0) 0 .0) m5.. Z 4 'twco4 0 -. U 1 a
V5 di 00 :9 U) 00 47 ' ~ Z 00 v5 4 0 .C
U~~4 CU C .
4) 0 U 0 .045 0 VU VUU
c' O .0 a5 u. to* u * . 0 o5.
Aj cc S.. 00 .. )u r. a.Cf-H 0U w .(A 0 C
a- a UU &j (t .2 c
*~ u a UC C 4 . 0 w C
00e~ . ec - ) CI .-4 Cw5 ̂ '' (D 00 45 CU - o~r- a Ir~ wc 3t 0 . w0'U C
c ~ r c W04 0 44 rj -4 00 445n &
ol V(4 J.40 U C H 4 L)0 ) tv 0 (V c 0 a wU w
CL-4W- 4 W0 a) U
7745 0 45 U '0 0 45 1.L-4 C U 45 4 C , >
$4 CC 0.-H cC 0 0 V'0 0. m -4 0 0 45
C- a) 0S. 0c U U .0 0 C
'W' C Duo 2U .0 4 4 C. .> 03 M'OU 0 CU 0U- 4
1. ca W-0 . .0 CU t) '- U 4 (0U C Uv* tl 450 bo U 0 0U 0
*.,4) ,-o. c1. 10 45w U 5
a . 45 -..4 w~ r.C00 0 05. 0 0a)C c '0 .14 3 -A
I T ~ wU 0) a f -H "U 0 C C' (U
Lo 45 j H -~ -4S .. 4~4 0) v3 -H Un 'o .0 0wCU) c- .0 02 H U C 0-4 0UU
*~~~- 0-04 S. . O C
"I4 0(0 w '- w5 ) 0.0. .0. w
a* X C a... wa s40
Q Ck . IL tn EU lH- J3 HC... 4 .
LI~ ~ CU'
'0~t 05 m4. w .s 0
Un U 45C5*~~~1 C *01)S
0 0.0 0 0- 0.. In 'u 3. 50 H S
40 0 o - c. (42 5-
-I 0- u w) Z
~ U 13
ccc * H
0o -a ~*0c AE C. $
ow a2 4j
'.J 0 0 m
mK 00 a
K &-
o ~~~ Vc D.h 0 1'*i
l£C~~ - 4 - L
04 .- 4 wC
w 0 042L
10
N 0 402 O
z 0 1
zU 0
0 cc -
L. -W-. 0 0 o
C>~~- ZC W, e .d.LU.
X, 0
~ N C
U) (A 0 2 2 3-3.- ~~ Ai
4C &C000
24 CC
KL3. .0 w I u -
V) - Z,. 24
CC -~ 2 O ~4 CI14
2 ~ .2 20 0 S7
0K40
w 0 .C
.0 v
4004 w 4
410- a
LL U ZU
41.0 0 00-
UC= C.C
.o..4J, J, r 1 04
.14 ,' -0 In.
14.4 *Z4
I. @ ,4*84 4C
t~.. 0 C 4, ~ ' I.4 414
In 4,......r., ~ .4 15@
3 ACCESSING THE INPUT SCHEME
3.1 BATCH JOBS
To access and use the new input scheme in the batch mode (i.e.,
by submitting a card input deck over the counter or through a remote
terminal), use a deck setup such as that shown in Table A.4.
Note that an optional card may precede the data cards, directing
the input program to print each default card changed, followed by the
new card which replaces it.
3.2 INTERACTIVE JOBS
To access and use the new input scheme using the time-share
system follow these steps (also shown in Table A.6). (First, you must
have a procedure permfile containing a small CYBER control language
"PR0C" and a set of control cards. A sample procedure permfile is shown
in Table A.5)
Step 1. Access your procedure file with tile ATTACH statement.
Step 2. Execute the ROSCOE time-share program by typing R0SC0TS.
Step 3. Type your inputs, in response to the program's
message "INPUTS?". The program then processes the
inputs; that is, inserts them into the standard deck
and checks for errors. If errors occur, the program
prints them and asks you to input a revised list by
again asking "INPUTS?". When no errors occur, termi-
nate ROSCOTS by typing "RUN". The job file is then
automatically placed in the input queue, and control
returns to the INTERCOM system. You can check that
your job has been accepted by typing a FIND, nnn
command, where nnn is the first 1-5 characters of the
job name (first parameter on your first control card).
16
APPENDIX A
USER REFERENCE TABLES
*17
a taA A S.40o0 000 0 0 52
-Z Do L .
C) UJ
Z IA
14 La.4 -. 4 U,
.9 Q .. .4 a
.3 433 IA.f X.-O i*~L L4 a * N.
6j 1 .Sj .6 65,- -0. 0 L
-S j
I a i j a L-S j
CC,
X a
; j a :a a) uj L, aj a~ I
*z a m asw o 0 a In - , o.a a a a ~ a ~ -- -c ~ , a l
*~ ~~~~ a1 a 'a aI4* 0 54 C u U a*
* ~~ ~I ** 0. AJA it I4* .. .% 4
* a. a a .20 * 1 t. 4 .. j a A .1
* a, a a CU-aA I L). A~a L.. -0. a. .41;*~ ~~~~ a, aa a--c is -. 4tu0.L ai a 1-
IX J. I. Lf3S4 *-a a4
*L at a S1 -0. v .L l
* m I, .4.2L a .-. t.. 40S a A~1,8
aoa WU www wo oo0 04. 00 0
4u w 4 w6
a. IQ4
ULIc u40((
4If I-
-v N N N
*~~~ DL3L7C~..
I
01 Ao~
I
SL
x0 LIn L3 o
L) .3 it -1 4- -4LI ~ 2 0* .JVI
* OW ~ 4.4 .jJ 0-4 -owI ~ ~ ~ ~ ~ W -V4 *- )*
3. m-.
"xL C4 Q) .- D. cu3 .
*~ ~~~~~ 33 Q4 0 (
I SE.-' 4 0.1 02 -....-.- 1 -'a
* (.I£. LI 4.2 1 L 2 . .j4LIU 0. l. .V0
V 4 ... . 44 *. -
*~ a4.. - . . I£IA A.
* .-- .2 I I ~ f4 .A 24( .j I L
* 44 (20134 - *3£4 0 ~-.2. (0 A In
j~~~~~~ o-2. -- I
I-~ ~~~ znU)0 LICX ww
* t.4i it ~~~~C.A tZ . 4 I.L 4.
* .X .' ~L w 04 a 4 IJ~J '4 Ej .03
* ~ 3?. 1.1 ... ILI . 0.0 0 IIL
* a4 00. .4 0 ~ LZ C.~ £(0AIA3 0-0. 0. . 0
~ ,.-La - U 0 < X ~ UZ(W 4 C
* ... 2.~' ID ~ AA CZ0o
5 ~ ~ ~ o In w0(0 1 .. 4 I O4 L I
u v.-. a; X)~ . 2 x 4o .4o Ca
* ~ < LI?.~. I CL C.C ~ .0*~ V,0CD
* ~ ~ ~ ~ $i of. IfU .1 It~L 'LI 4 2 46L U
* 4 itJ LI 40Z 4... 444424 a43 2 . In
*~~~~C In4 a- 1 4 (0.54
*~L 1- An In -f .4 46 -
ILI) LI o.. o1 C) U.. 4 YX0L 1
cc iI 0.0 In oC to Co.( toSD do as.4
LII I *' *~(IX ILI 1.LI 1 0C~~U U L
a U
-A W WO L W w 0U 0OULU0Ou Uu 00 ?OO 0u a a u 0u 0 Qww W La C
12 -.
CL z
0- 1- 1- 1 - . 1
A flca N"" 'L
4
La
Ir 0a
A A9 InIn1
Ix x, z0 D
N in z z, z z -, ) c 3u - :
a .1 04 . 0
-A -jII 4
*~ .1- ---- 9
I a x x4 La
I a N aa aa xx S- 1Np i I C n 0 "1SI
S ~~ 13 0a a nznn 5 Is a a n2 n a 'it
S t.. - - -LL.'L~ZC~20
a -0o
0 C Li i
* L3
*l 0 wW .1w "
I Q a-
* '0,
w 0J z
-~~" m -j- . 4 ..
-IV,
.3 1 13 3 .34 x60 Q L Li u
S~1 A4 %2 U -jL
S I .Li4 0. 6 3-
*~C X.4 ~ I 43C
CJDI-6I . .*n x - LD 3 2L i
* - - *L'4L 033 5 '4 21
on tu 1) 21) 4411 1'A (nUU Un W. V.J Aj . f)~ W -A InJIn
WW
IL 44w', o c J L a LIo
LI 00 0003
w ) .aw .L . . . in
.4 .4 Laa
W 2N
No Ijj
z St 0 -
S Cc
. 0 ;l~
* 4 -N U U) 121 Ll. z V-3
- -w2-- 4 - tLL' U u ArU
z 01 2 123 o -a1 --- -3 4 . 4 . L ! U
S 2 -4 X.- . - l
.)12 < A (x2
0L .. 8
5 414 4 4 12 1.* .4.4. USIL. 2.. .jU~.J
4 -a a-~2 41)i..4.~4~JA *4)
*~~~~~ 4L < 6- Z .. . 44.
* ~ ~ ~ 1 -. - - LlU -44 - CL4 U -.- a
* -c .. .224 .. - ~ 4 'A . .
S I'm4 4 .. 1L 2~ J .J -
0- 2.
CO I ~ .f 2 .1. ~ 2..3.0* .4 .4' .2
3 . - 4. I .(1 CUCUIL4 /24 Ua-..
I~ ~~~~~~l U 4I -. U- 4. I A -..4w , & w.-) . a 0
or M Nn or LL44 Z,, wtN % L1 M -.
D L,.- MC. An.44
J4 -- c . W £ 4 - Xt-44 *. -4 a.. S
orC .C .. 2 LJ41 .L t. 514
* .1.) - - 41..,4 - ~ 4422
. L~ 2. U 25.4 J54 ~ 2)44~O42J./)
/445 2.04lI-
a~ ii
4D tj U IA CAD' CA
< m3 4 ) - aC. Q 4L i
u* Macc L; h
~3U7 o
*~a zw.3 .- 2* *4 0 1 5.~4 3
'#7 u 3S .344 S 1( * c) 4
IIn
O WO
~ S CA
C~ 4 Do
x .3 I 0ac
I L . u *4 o4 w1 cc
o4 o 010 0 - I 1* . (.3 IU . 4
* ol a-l.h 0Ua ca Ix IL
co 4.K S oi o3U o2 43 co 0
* 2 1.4 *.3 .4 44 3 I3
W (3 4
pq 144
.P.
e t 4 4 Ul .io1c ; m
4 La
L) cc
* .3~sg * Nso
z Ix
z 04
z ZI . 0
SC L)
e CJ Z 10 x
*~~- IX 5 (4(*~~~- -j4 . 2 0
* ~ ~~~~ z1 i! 4 30Z
j 10 a31 . . 4L 1. 0. .
*- 1. 1 0 N01 54 55 . 1
* = *.. La - A0. 'A54 4 02cn14
U* 14U O x. U. -. N 1 1 3 4 3 4 0*~~~~~~I U x.. a .4 4. 4 ILi 4 ( 1
* 4 C 0.0.a14 L24 - 0
4 whi)' 4 h oV
u WN Na(
0. .4
-b cca,x :4 at cc
.~0 m: at aU
o~~~ 0~ * N NNK~S5h
I. V- w4 . L3 0
u 4
f I x 0 z- , l
j tS -3 CU, i
z CL Ii > 0 0j
*~~~~~~V x, '>i- . , S ' i 4x 2. c- Ui I - .C! a1 C .1 hi .. 9<.
I - o w3 - 0 x1. .. Z. a 1C1 ~ -. 14 S2 C a 0i a.L-4,. .J a aJ-
*1 021 4 0h 3 5.O 3 - 0 0 5 1 43 4 4Ja hi 431 x u.23 14. 4 - a 5- 0 - 03C
S -(3 - 4 a J ) J9 4 2- C aSj4 -aof Is of X. I to V o..2 U CW . 0 L
a 04 . 3 i.-t- ~ 0 0 4 5 L - 5:. :: 1 0. upS 2 ii*~ah-. L 2 4ii
0 0 .9 i..a4 IC 5 . O 15
S 4 4 4 £ 5 aj 3. o c r . , a j -.- I. -a I i C C 5 . . a i . L La . i .0 U S C .
CL Li w 3 S a i . 4 4 2 4 .0 hkl
a -a Ca J4LattoXS-h a C 03 O h25
C 08 1 o CS M0V )0 )C
os w 014 100 00 co 0ca04 .l4.LIJI
12 Id 4.l w c
* I 4A 44 3 4 4r z
D LI IIK000D , A 10: (AW i :'1 . 10. w
I
3- t" cc
- a.l wI a IS .i A .41 0 a. C,
* * * I 14 - 9 LC I U .0 *PI Z*4 V. 44 zL, C43 S xO *z0 V. 0D -A dr0 t0n1.. w C
'1 InawJ 0 I
u V6) 61 Q0orm C
*1 a Izau -,A 0 w J w a
U ! c t I I 1n I-
wmx 4r w L3 - z ta* 0 'AIS z. t- w
* U 0j1 U, z 0. 2. 6
13 ..0 -T.~.. ~ - - 1 1* - 1) 140.4 *1) a 1 I 11
* 4 11.44~u O In.. 444 0 ~ 0 L* ~~~ L .4 C4 0 1 01 . 8 - 1
* ~ ~~~~ cc LI w aIL U U 4 0 I aL* ~ ~ ~ ~ ~ ~ - .4 j 141 10 .4 I 0 4 I- K 4 L8L
".: w~ .1.1 I , 4X n4 t Z t- -0. GA 4'7 -) -1 0 0.T. Is W£ J 6AnC 1 4 0- L
0 U ' I a .1 x .1 v0. u41 u4 w4 u. .4 z4 2 In* ~ ~ J~ - l, Un 1.02 1 U.10- A. L 4 4 X 0
I ~ z 3. Z I.. C3 I4 K . I k I S II AO i. Z4.O 4 4l I . 1 0 4 8
u I x. 000 I 0 u U4.- ul M 4 ... 1 14 .I L) 0 Z1 z1 0. tS w x -4 m
* 1.11 -4 = 0 UU, - 4 a-j x x km 0 0 U,4In w a 0I~~~~C CL .s 00 11 2 11 I02 19
* L I.I -j1.0 I I 14 4 Z,00 L U' , X1 400 . 4
w 441 lo A 4 C- 1 4. L Z .3 - 411 CO 4
* ~ J It . k-- (. o to111 s1 . f21 . o I 4 .4
a) CL C) M . 1. w1I 1444In C 0 m X8UA 0.I 1Il a 1 1 1 4 1- L 41 4 4 Z. Lt a. 5 z 0
1 _ 0. J .W 11 w Z J J. 'A0 3,A * 02 4 4 1 I *
I wO - 0 1 / 4. U.5 at.C 40 vp B A 2 01 0..
* Q.1) 1 v .0. 1.1 v4- CIA* 0.4 t2 ft 0 - 4
-C -.,A1 A 4 4 4 .4 8 . u A . 4 4 0 .. 1 5
W -C 4 I/1- 1-0 ItI W4 UJ14..1.4 w 14. W84 In
* %a1- -146 .I-. X1. I-.~ ci IL ru 0 w
I L. 4 4 - - . 4 C - 4 4. 0 4 C . 4 - L I00 1411 COO p 4A 9411. f40C 1U1. 41 -1in I 1110 a In L
- 41.4 I1. II 14 14/ 4 4 14.. 441 .1 410 10.-1. 2006
C .
-. aV
L 0 C, 3S,-I l
* ) 0( 06
ta -
-lr .. 5:
J 0 36 10.-.
A I LoW
2 2
0i S
0j In
;z ZInS
*c 0-5
*i L.130
el a a. In 4 OreA %
* 4 .127
AL - U)U 0 U
U UV) .. .0.0. Z3 3
'o- .3 a. w. 0 U
w1 Q U. 0~ -4 gU an --1-U~ 3
t* w i qo I -ts
IL w i-iiJ xz 0 0.i
x-c L z U;: w) :: (3!ZC-w 14 1X 3± 0! .
a. w) ix)40 Wz 4
Li. w 000 w- a. <0 w L 344'w .3 .cc a( x3 z
-3 u / ZU Zf -X 54 4) L&4
0 n 0 4/ 4 ;0 w.4 ~ ~ ~ ~ c 14 ~ i. *5S 040z
0 0J . . 0 U ' 0
0a 3L M2 00 . z - - .
Li~~~ -i w.4 * 2 0 - iI
61 Ow3 AV) cc 3. 12 3
.3 ~ ~~ 4 <.J..J T .m 53.~1 -j 74 L BiXu w / o- i .2 .
2 13 2' - 4 4 3 0 0 ( 28
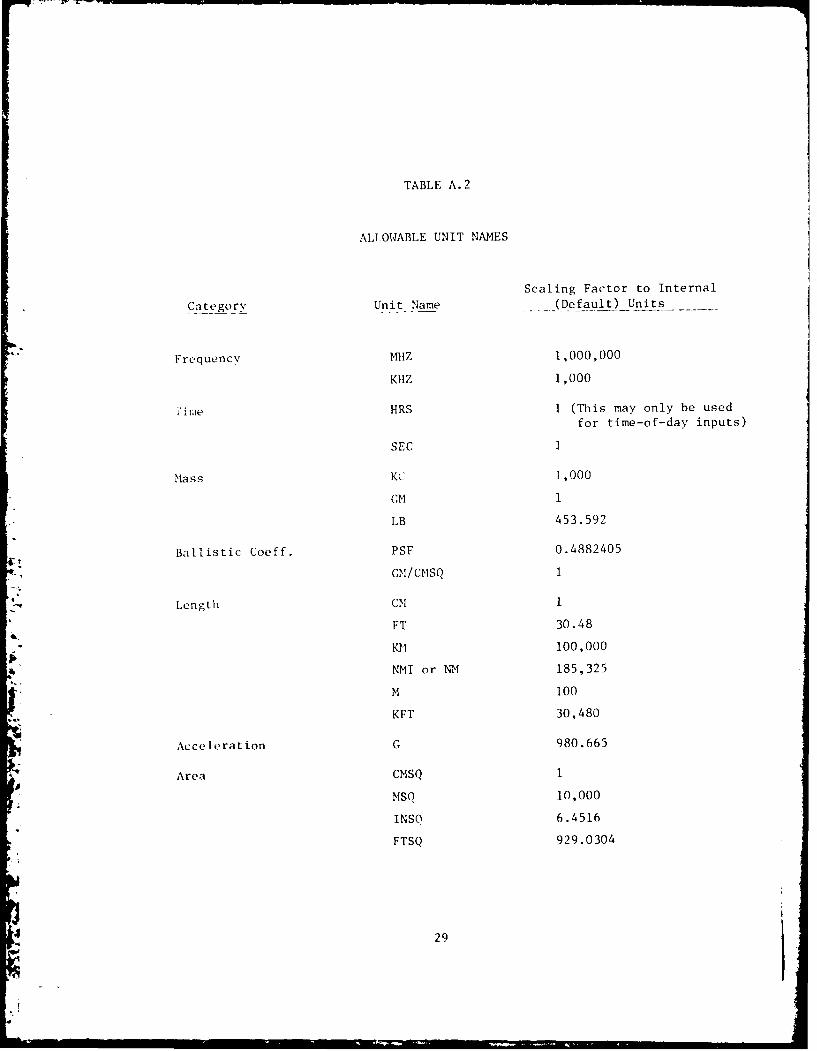
TABLE A.2
ALT.OWABLE UNIT NAMES
Scaling Factor to Internal
Category Unit Name (Default) Units
Frequency MihZ 1,000,000
KHZ 1,000
Vime HRS 1 (This may only be usedfor time-of-day inputs)
SEC 1
Mass KC 1,000
GM 1
LB 453.592
Ballistic Coeff. PSF 0.4882405
GM/CMSQ 1
Length CM 1
FT 30.48
KM! 100,000
NMI or NM 185,325
M 100
KFT 30,480
Acceleration G 980.665
Area CMSQ 1
MSO 10,000
INSQ 6.4516
FTSQ 929.0304
29
4I
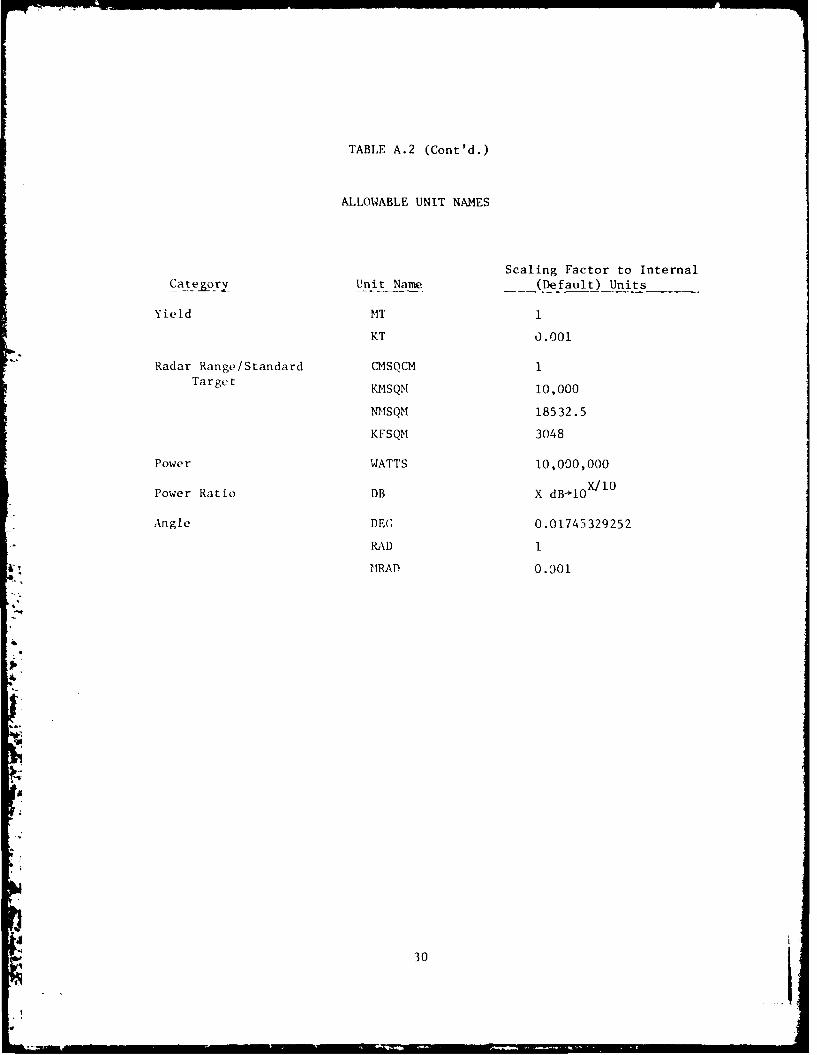
TABLE A.2 (Cont'd.)
ALLOWABLE UNIT NAMES
Scaling Factor to InternalCateUnit Name (Default) Units
Yield MT 1
KT 0.001
Radar Range/Standard CMSQCM 1Target KVSQM 10,000
NMSQM 18532.5
KFSQM 3048
Power WATTS 10,000,000
Power Ratio DB X dB10X/IO
Angle DEG 0.01745329252
RAD I
MRAD 0.901
-4
30
.I - .== m..=._ , r -
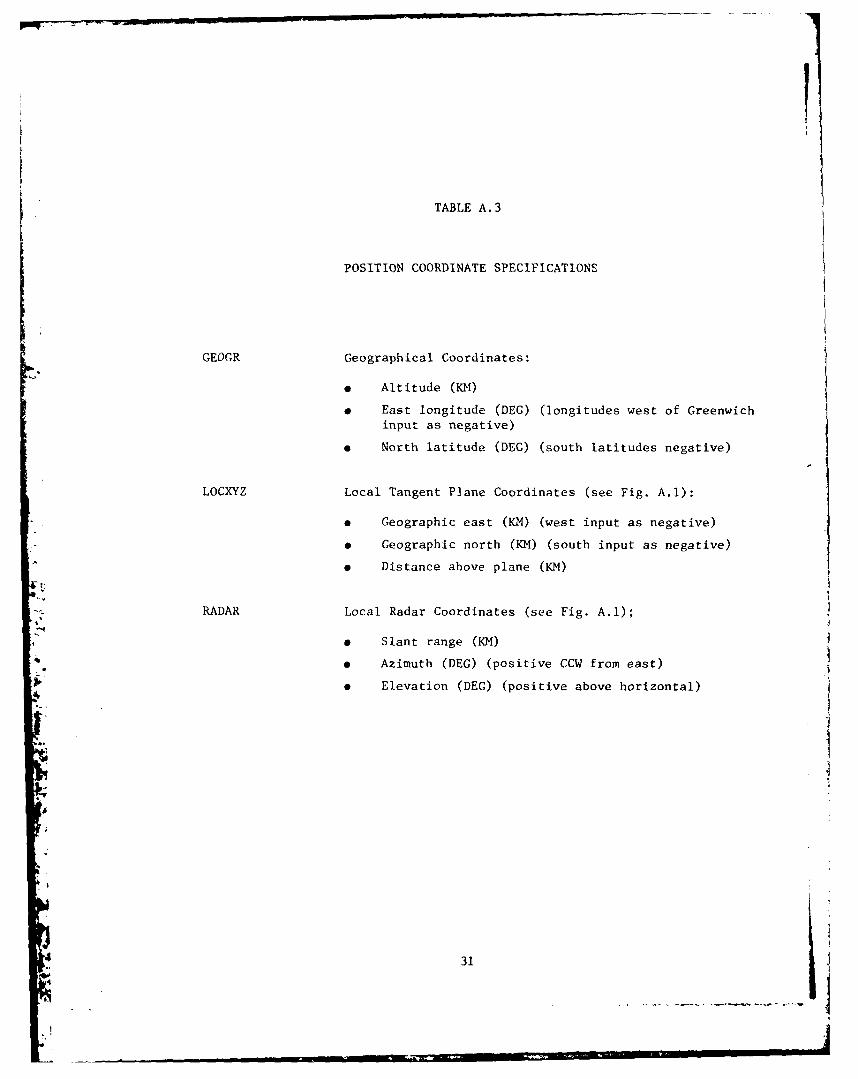
TABLE A.3
POSITION COORDINATE SPECIFICATIONS
GEOGR Geographical Coordinates:
" Altitude (KM)
" East longitude (DEG) (longitudes west of Greenwichinput as negative)
* North latitude (DEG) (south latitudes negative)
LOCXYZ Local Tangent Plane Coordinates (see Fig. A.1):
* Geographic east (KM) (west input as negative)
* Geographic north (KM) (south input as negative)
0 Distance above plane (KM)
RADAR Local Radar Coordinates (see Fig. A.1);
. Slant range (KM)
* Azimuth (DEG) (positive CCW from east)
. Elevation (DEG) (positive above horizontal)
%
31'4 31
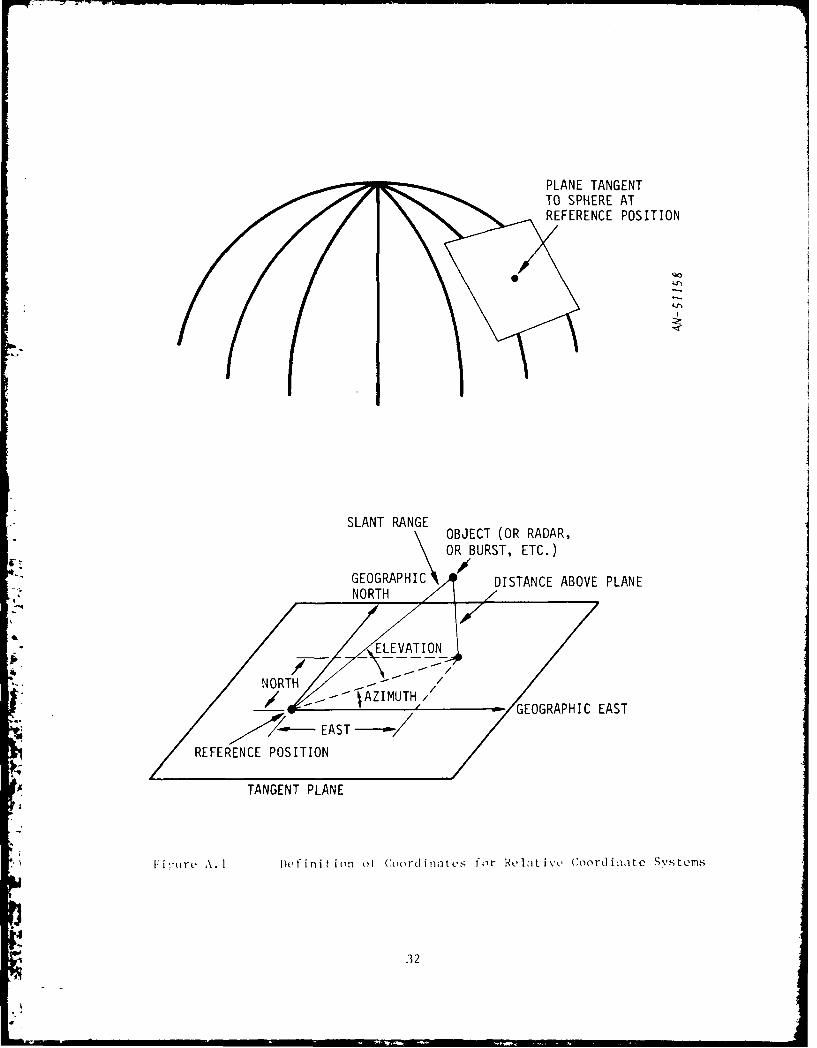
PLANE TANGENTTO SPHERE ATREFERENCE POSITION
SLAT RNGEOBJECT (OR RADAR,OR BURST, ETC.)
a:-wGEOGRAPHIC DISTANCE ABOVE PLANE
NNORRT
EAST GEOGRAPHIC EAST
A TANGENT PLANE
i i'rt c. De f in i t ion of (oord inates for Relat ivc (oord inatc Svystcms
I .32
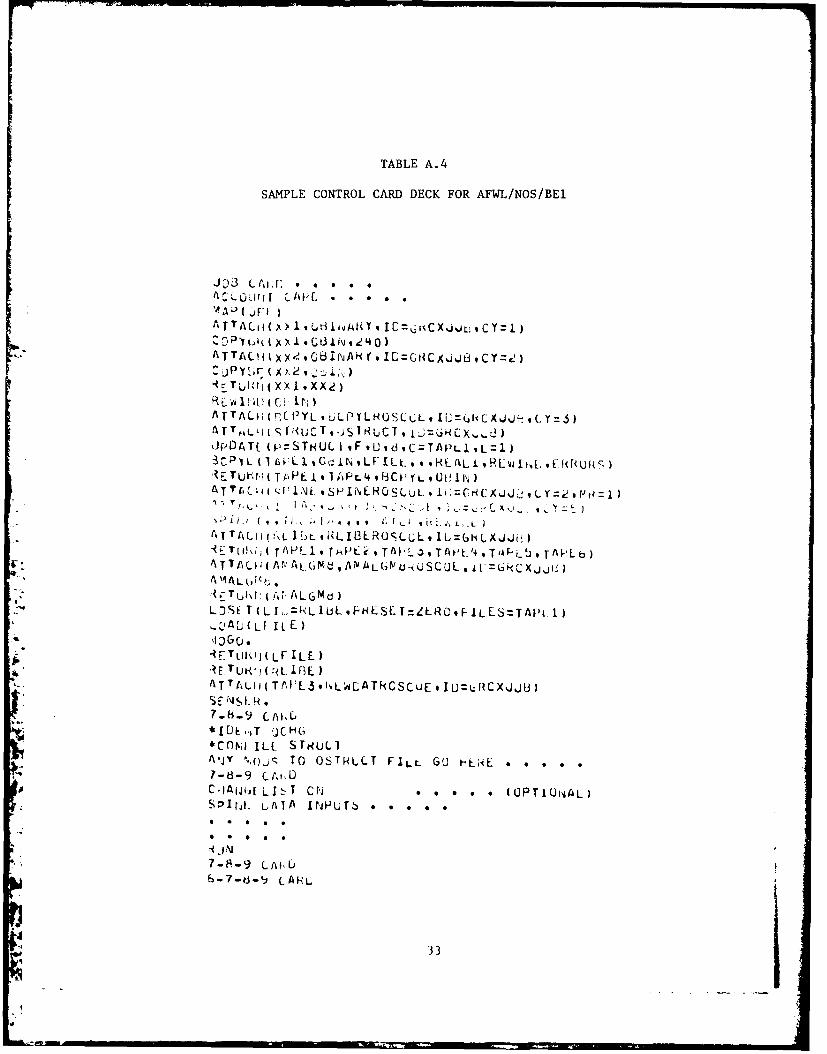
TABLE A.4
SAMPLE CONTROL CARD DECK FOR AFWL/NOS/BEl
ATTACH 1xXS-',1,~i'N,ICGtCjjt3Cy=.)
RolWiio(c) in)
ATTALL s rucT ,6L TLUCT, IjHC.(ICXJJL).Y6
tPDAT((p:STHUCiFt,UttC=TAPLiL=l)
-iA ITA I t !IB( P L 1 9T AP U T L , T L 4 , L 'X P L b PAT T A C. AfIW'f AL G I, AIdAL (1 j - tCS L L 6 ' : X j jI
:J;-TLIhft4," fLGMd)
~A,, LF IL E)
iVToi(Lr ILE )RE TUtir I ( r4 L I BE.ATTIdW lTAPIL3 ,1LWLATkCSLUE ,Iouf CXJJU)
*IDL. T -)CH(
*Cnflr~ ILI- STRULlA~jY %,oL ,; To OSTHLLT FILL Go H-L~iE ..
7-8-9 cAt.Ua ~C-gAIJ(,( LIST Cr4.. (OPTIONAL)
S;Pltj- uL~iA IN~PUTS
*7-8-9 LIfI4
33
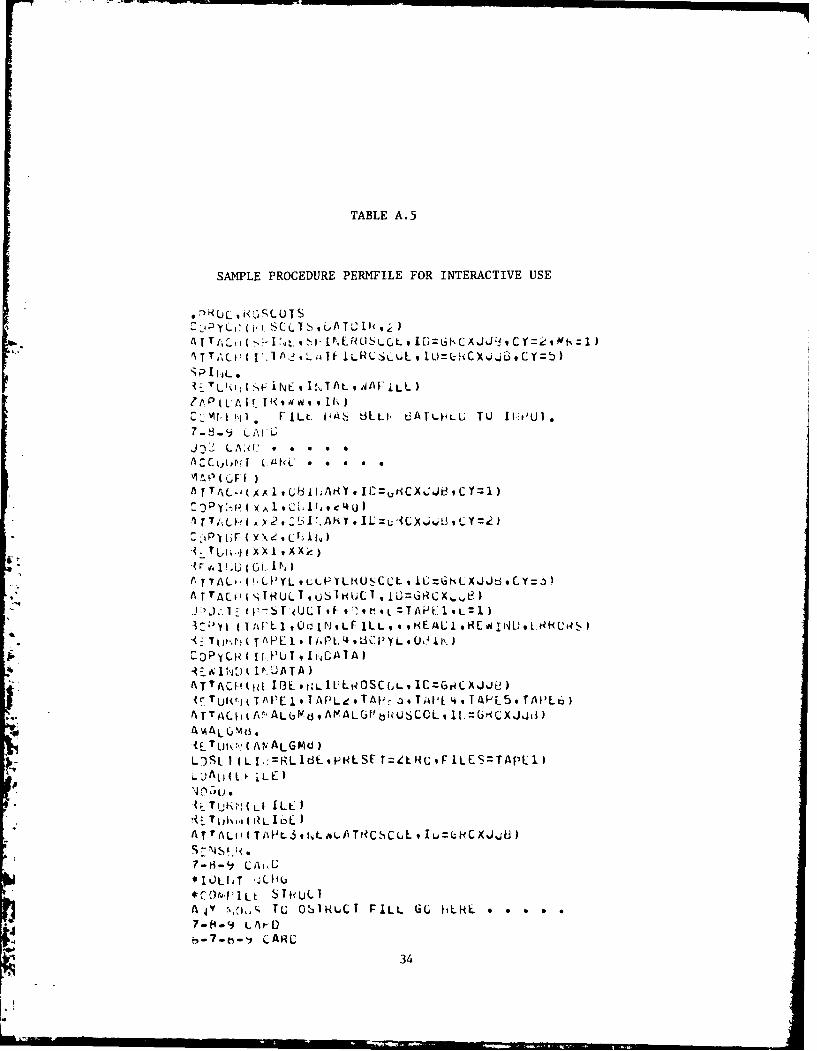
TABLE A.5
SAMPLE PROCEDURE PERMFILE FOR INTERACTIVE USE
.rNUC. , AT" 1U(o
'NTT,C II( Il A~,--4 '-' IILRCS&LLI L)=LCX-,ju,CY5b)
C '' ~ i j [,) I F I ~t LLI t3AF jLL )
7-8-4 LAIJ''" L '0' 9 9 e 9 1
C 0p 'l P ( X A ICL1f " IC4
rTAP 1 i UP. L 3CPL = * .
ATTACH4( ti. I3E. lL ILLt4SC(,LqIC=Gt4CXJ.Ja
AML G(s -3i E T UW ' C AtvALGMd)
TljL( LI~ LLI
iATTrALI I T1APL5 lL.%LA TtCSCLL , jLL~[
* IUL~T 'TIiULI
A jy hS TL; o0NluCrI FILL GG FhLHL...J 7-14-9 tAt-U
34
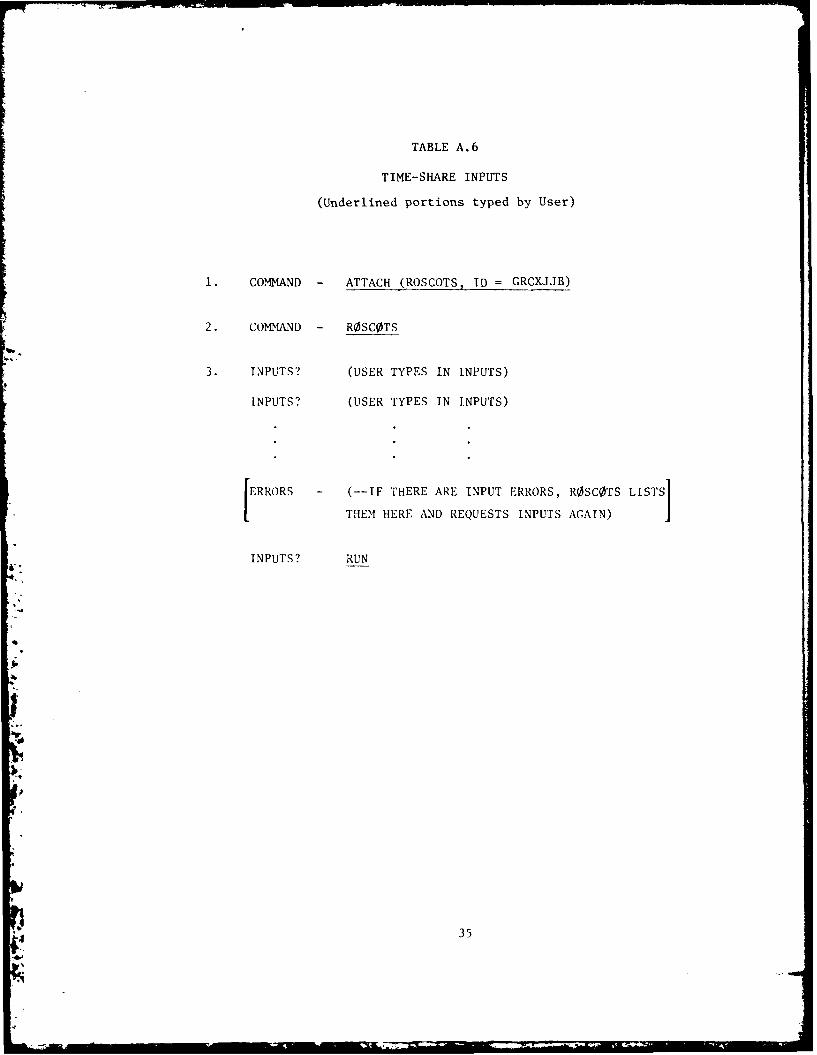
TABLE A.6
TIME-SHARE INPUTS
(Underlined portions typed by User)
1. COMMAND - ATTACH (ROSCOTS, ID = GRCXJJB)
2. COMMAND - ROSCOTS
3. INPUTS? (USER TYPES IN INPUTS)
INPUTS? (USER TYPES IN INPUTS)
ERRORS (--IF THERE ARE INPUT ERRORS, ROSCOTS LISTS]
THEM HERE AND REQUESTS INPUTS AGAIN)
INPUTS? RUN
'3
b 35
DISTRIBUTION LIST
DEPARTMENT OF DEFENSE DEPARTMENT OF THE ARMY _(Continue
Assistant to the Secretary of Defense U.S. Army Nuclear & Chemical AgencyAtomic Energy ATTN: Library
ATTN: Executive AssistantU.S. Army Satellite Comm Agency
Defense Advanced Rsch Proj Agency ATTN: Document ControlATTN: STO, S. Zakanycz
U.S. Army TRADOC Sys Analysis ActvyDefense Communications Engineer Center ATTN: ATAA-PL
ATTN: Code R410, J. McLeanDEPARTMENT OF THE NAVY
Defense Nuclear AqencyATTN: RAAL, P. Lunn Naval Electronic Systems CommandATTN: RAAE ATTN: PME 117-20
4 cy ATTN: TITL ATTN: Code 501A
Defense Technical Information Center Naval Intelligence Support Ctr
12 cy ATTN: DO ATTN: Document Control
Field Conviand Naval Ocean Systems CenterDefense Nuclear Agency ATTN: Code 532
ATTN: fCPRNaval Postgraduate School
Field Covmsand ATTN: Code 1424, LibraryDefense Nuclea' Agency
ver nore Bra fh Naval Research LaboratoryATTI: IJPR, ATTN: Code 2627
ATTN: Code 4709, W. Ali.atlonal Security Agency ATTN: Code 4701, J. Brown
AT N: R-52, 0, Skillman ATTN: Code 4780, S. OssakowATTN: Code 4700, T. Coffey
Under Cecretar/ of Def for Rsch & Engrg ATTN: Code 4780, P. PalmadessoT,: tratei Space Sys (OS)
Naval Surface Weapons Center
WWMCC>, System Engineering Org ATTN: Code X211ATTN: R. Crawford
Strategic Systems Project Office
DEPARTMENT Of Itl ARMY Department of the NavyATTN: NSP-2722, F. Wimberly
Atmospheric :ciences Laboratory ATTN: NSSP-2722, M. MeseroleU.S. Army Electronics R&D Conand
ATTN: DELA%-LO, F. Niles DEPARTMENT OF_ THE AIR. FORCE
BMD Advanced Technology Center Air Force Geophysics LaboratoryDepartment of the Army ATTN: OPR, A. Stair
ATTN: ATC-T, M. Capps ATTN: SULLATTN: ATC-D, W. Davies ATTN: LKB, K. Champion
ATTN: OPR, H. GardinerBMD Systems CormandDepartment of the Army Air Force Systems Command
ATTN: BMDSC-HW, R. Dekalb ATTN: Technical Library
Harry Diamond Laboratories Air force Technical Applications CtrDepartment of the Army AIlN: TFR, C. Meneely
ATTN: DELHD-N-P, F. Wimenitz ATTN: Technical LibraryATTN: DELHiD-I-TL
Air Force Weapons Laboratoryu.S. Army Foreign Science & Tech Ctr Air Force Systems Command
ATTN: DRXST-SD ATTN: NTYCATTN: SUL
U.S. Army Missile Intelligence AgencyATTN: J. Gamble Air University Library
Department of the Air Force
U.S. Army Missile R&D Command ATTN: AUL-LSEATTN: DRDMI-XSATTN: RSIC
37 PBcU ba PAGz BL w-Lha 01 &IU4ED
DEPARTMENT OF THE AIR FORCE tContinu-ed DEPARTMENT OF DEFENSE CONTRACTORS _Continuedj
Ballistic Missile Office General Research CorpAir Force Systems Command ATTN: J. Ise, Jr
ATTN: MNRTE ATTN: J. GarbarinoATTN: MNXATTN: MNRC Jamieson Science & Engineering
ATTN: J. JamiesonDeputy Chief of StaffResearch, Development, & Acq Kaman Sciences CorpDepartment of the Air Force ATTN: D. Perio
ATTN: AFRDS ATTN: N. BeauchampATTN: P. Tracy
Headquarters Space DivisionAir, Force Systems Command Kaman TEMPO
ATTN: SKX ATTN: W. KnappATTN: SKA, M. Clavin ATTN: K. Schwartzman
ATTN: M. StantonHeadquarters Space Division ATTN: T. StephensAir Force Systems Command ATTN: J. Jordano
ATTN: SZJ, P. Kelley ATTN: DASIAC
Rome Air Development Center Lockheed Missiles & Space Co, IncAir Force Systems Command ATTN: D. Divis
ATTN: OCSA, J. SimonsATTN: OCS, V. Coyne Lockheed Missiles & Space Co. IncATTN: TSLD ATTN: M. Walt
Strategic Air Command M.I.T. Lincoln LabDepartment of the Air Force ATTN: D. Towle
ATTN: NRTATTN: XPFS, B. Stephan McDonnell Douglas Corp
ATTN: H. SpitzerDEPARTMENT OF ENERGY ATTN: R. Halprin
Department of Energy Mission Research CorpATTN: OMA ATTN: R. Kilb
ATTN: R. Hendrick
OTHER GOVERNMENT AGENCIES ATTN: M. ScheibeATTN: D. Sappenfield
Department of Commerce ATTN: D. ArcherNational Oceanic & Atmospheric Admin ATTN: R. Bogusch
ATTN: F. Fehsenfeld ATTN: F. Fajen
Institute for Telecommunications Sciences Nichols Research Corp, IncNational Telecommunications & Info Admin ATTN: N. Byrn
ATTN: G. FalconATTN: W. Utlaut Pacific-Sierra Research Corp
ATTN: H. BrodeDEPARTMENT OF DEFENSE CONTRACTORS
Photometrics, IncAero jet Electro-Systems Co ATTN: I. Kofsky
ATTN: j. GrahamPhysical Research, Inc
Ae,-ospace Corp ATTN: R. DeliberisATTN: J. StraussATTN: J. Reinheimer University of PittsburghATTN: N. Stockwell ATTN: F. KaufmanAT N: I. GarfunkelATTN: N. Cohen R & D AssociatesATTN: V. Josephson ATTN: R. Lelevier
ATTN: F. Gilmoreherkeley Research Associates, Inc ATTN: B. Gabbard
ATTN: J. Workman ATTN: R. TurcoATTN: P. Haas
, IncATIN: J. Marshall R & 0 Associates
ATTN: B. Yoonwoneral Electric Co
ATTN: M. Bortner
38
DEPARTMENT OF DEFENSE CONTRACTORS (Contiue- DEPARTMENT - F DEFNSE ONTRACTORS Cnt inued)
Rand Corp Teledyne Brown EngineeringATTN: C. Crain ATTN: J. CatoATTN: G. Harney
Science Applications, Inc ATTN: Technical LibraryATTN: D. Hamlin ATTN: J. Ford
Science Applications, Inc Visidyne, IncATTN: W. Mendes ATTN: H. Smith
ATTN: C. HumphreySRI International ATTN: J. Carpenter
ATTN: W. ChesnutATTN: W. Jaye
L - -"-' " -- '" ,: " " -'I I " r