the roscoe manual - defense technical information center · sul "z, dna 3964f-21-1 the roscoe...
TRANSCRIPT

SUL "Z, DNA 3964F-21-1
THE ROSCOE MANUALVolume 21-1: Optics Model
Joel Garbarino
John ee Ise
General Research Corporation
P.O. Box 6770 VSanta Barbara, California 93111
c:Z 1 January 1980
Final Report for Period 9 November 1977-1 January 1980
CONTRACT No. DNA 001-78-C-0002
APPROVED FOR PUBLIC RELEASE;j'DISTRIBUTION UNLIMITED. -
M; IAR 2 5 1l ;i
ATHIS WORK SPONSORED BY THE DEFENSE NUCLEAR AGENCYUNDER RDT&E RMSS CODE B3220"78464 S990AXHC30101 H2590D.
Prepared for
Director
DEFENSE NUCLEAR AGENCY
Washington, D. C. 20305
81 3 25 065

- |-f|
-i
Destroy this report when it is no longerneeded. Do not return to sender.
PLEASE NOTIFY THE DEFENSE NUCLEAR AGENCY,ATTN: STTI, WASHINGTON, D.C. 20305, IFYOUR ADDRESS IS INCORRECT, IF YOU WISH TOBE DELETED FROM THE DISTRIBUTION LIST, ORIF THE ADDRESSEE IS NO LONGER EMPLOYED BYYOUR ORGANIZATION.
- 9N
4 _e,

_ _ _ _ _ _ _ _ _ _ _ - ~5
UNCLASSIFIED
SECURITY CLASSItICATIO4 OF T.IS PAGE 'Uhin 11m,. I ,lh.,l
j )EPRTDOUMENTATION PAGE UEO1
jOVT ACCESSION No 3 RECIPIENT'S CATA.., -kiMBER
DN TITLE1l V P-i~ TYPE OF REPORT 6 PERIOD ZOVEJ Ir.
~~Fi 1E~ N epCj *6 P-riodE RP UQ -11hNUL a 919 Nov 77-1 JLn
-#0u ez -I Optics Model tieFOMNIOGRPO
______________________________________ CR1520, vol. 21-i"U7A .os,8 CONTRACT OR GRANT NUMfLR I)
4 Joel/Garbarino -- j )DNAP- 78-C ' 02fJohn/Ise
PERFORMINmG ORGANIZATION NAME AND ADRS 0 PROGRAM CLEMLNT PROJECT TA ,.. k AREA A WORK UN:T NJMBPIG
General Research Co-poration VP. 0. Box 6770 11 u task S99QX 01 O-01
Santa Barbara, California 93111
It CONTROLLING OFFICE NAME AND ADDRESS IZ-REPORT-DATfE-
Director // 1 Jan 8tDefense Nuclear Agency IWashington, D.C. 20305 98
14 UD-NITORiNG AGENCY NAMAE 6 AOORESS0g dIleren 1o0M LC.nrroll1n4 0fl,1-e 15 SECURITYCASroh
~4'~ ~ 'UNCLASSIFIED0-~ ~ ~ I. O64 - ECLASSIFICATIONs DOV.GRAC010~--~ JSCR4EOULE
t6 DISTRIBUTION STATEMENT (of tht. Report)
Approved for public release; distribution unlimited.
17 DISTRIBUTION STATEMENT (of the Abst-Ct entered in Block 20. it differenti from Report)j
10 SUPPLEMENTARY NOTES
This work sponsored by the Defense Nuclear Agency under RDT&E RNISS CodeB322078464 S99QAJDHC30101 H2590D.
1 9 KEY WORDS (Cisrfnue an reverse side i1 necessary and ,drrfr24 by block numnb")~
Nuclear Effects SimulationOptics Ballistic Missile Defense
Computer Program
20 ABSTRACT tCoriltnue an reverse 1-dr it necess.ry and identify hv b.ock numhb-'
The ROSQE computer code is designed specifically to be the, Laboratorystandar1 -)Ifor evaluating nuclear effects on radar and optical sensors.This paper presents (1) a description of the optical code interfaceIstructure; and (2) a review of the major tasks performed by GRC--the
modeling of inhomogeneous regions. The first part describes the opticscode structure and the system simulation methodology, and,?resents some
DD 1473 EDITION OF I NOV 15 IS OBSOLETE UNCLASSIFIED kQL75$L
SECURIT CLSIIAINOFT AEi

UNCLASSIFIEDSECUAITY CLASSIFICATION OF THIS PAGEf0lhn Per& F tieed)
20. ABSTRACT (Continued)
nuclear debris, whose characterization is in terms of an expontentialautocorrelation function for integrated radiance. Separate exponentiationdecorrelation lengths are used along and perpendicular to the earth'smagnetic field, and time decorrelation is also exponehtial.
"- r
EEL
i--
" SEUNI C.A ~t"CATIN rF T|.€ PA[,'XlenO~lA Vlf¢reI
iI
sr

TABLE OF CONTENTS
Section Page
LIST OF ILLUSTRATIONS 2
INTRODUCTION 3
SUMMARY OF CODE DEVELOPMENT 42.1 Optics Code Structure 42.2 Systems Simulation Methodology and Sample 8
Output
3 MODELING OF INHOMOGENEOUS REGIONS 373.1 Introduction 373.2 G~neration of Radiant Intensities in the 39
Ideal Focal Plane
3.3 Differentiability of First-Order Markov Processes 483.4 Autocorrelation Function for Gaussian 54
Striations
REFERENCES 60
APPENDIX A: EXTRAPOLATION AND INTERPOLATION OF 61RANDOM SEQUENCE
APPENDIX B: FLOW DIAGRAMS 65
O
11
" • nn nu n

IILIST OF ILLUSTRATIONS
Figure Page
1 Systems Function Interaction Chart 5
2 Physics Function Interaction Chart 6
3 Surveillance Sensor Dynamics (OLOOK) 9
4 Object Dynamics (OPROP) 10
5 Object Charact.orization 12
6 Number of Paths/Object 13
7 Example Sight Paths for Fireball 14
8 Path Integration (SPCALC) 16
9 Example Cell List 18
10 Focal Plane Generation (OPSIM) 21
11 Variation in Mean Intensity 23
12 Spatial Correlation 2513 Time Correlation 26
14 Time Correlation 27 1
15 Multiple Fireballs 28 -
16 Multiple Objects 30
17 Multiple Objects--Growth With Time 31
18 Sensor Scan 32
19 Optics Dzta Processing 33
20 Surveillance Sensor Example 35
21 Surveillance Sensor--Example Output 36 -
22 Extrapolation of Gaussian Sequence in Three Dimensions 461
23 "Derivative" of First-Order Markov Sequence 51
24 Autocorrelation Function For Distribution of Gaussian 59
Striations
2

1 INTRODUCTION
As part of a continuing effort to supply the user community with
the best phenomenology codes available for the evaluation of nuclear ef-
fects on sensors, DNA has undertaken the task of expanding the ROSCOE
(Radar and Optical Systems Code with Nuclear Effects) computer program
to include an optical/SWIR capability.
An initial program planning phase was initiated in 1976 to formu-
late the objectives of this model, place bounds on the scope and level
of detail required, and suggest a plan for its development. The plan
called for code development during 1977 and 1978, with a completion date
of approximately January 1979, followed by a code validation and documen-
tation effort.
General Research Corporation, as part of a team of contractors, has
participated in this program development effort. GRC's responsibilities
have been primarily concerned with the development of the optics system
model and the interfacing of the optics package (both systems and physics)
with the code as a whole.
This paper presents a summary of the optics code structure. In
Section 2, a description of the optical code interface structure is given;
Section 3 presents a review of one of the major tasks performed by GRC--
the modeling of ifnhomogeneous regions. Appendix A provides some analyti-
cal backup material for Section 3, and Appendix B contains flow diagrams
for the major programs and subroutines which comprise the optics code
interface structure.
32
3N

2 SUMMARY OF CODE DEVELOPMENT
The following sections describe the optics code structure, the
system simulation methodology, and some sample outputs.
2.1 OPTICS CODE STRUCTURE
The ROSCOE code is divided into a number of separate computational
blocks which perform various parts of the systems or physics simulation.
Each block is made up of a number of subroutines, and is stored in a
separate overlay. These blocks are referred to as "events." In the
execution of the code, a series of computations, or events, is set up.
Each of these events is given a calculation time, and they are processed
(i.e., the proper overlay is called and executed) in a time-ordered
fashion. An initial list of events is set up in the input deck by the
user. Additional events may be added to the list as computations are
carried out to complete the simulation specified.
A block diagram showing the major computational blocks and infor-
mation flow for the optics code is shown in Figs. 1 and 2. The optics
systems blocks, or events, are shown in Fig. 1, and the physics events
in Fig. 2. Some interface blocks whic.. feed phenomenology data to the
systems blocks are shown in both figures.
The physics portion of the model (Fig. 2) is comprised of a burst
event which creates the initial burst parameters and several update
events to update the nuclear environment in time. In the low-altitude
region (<90 km), an update event is used to maintain the fireball and
debris region data at two times. The update event calls the fireball
and debris model routines at specified times to update these data, and
then they are interpolated at intermediate times as requested for systems
calculations or for printout.
A similar diagram for the ROSCOE radar code is given in Volume 1 of The
ROSCOE Manual.
4

- --
• .OI "* - " - rt a'
-,- .4Z4I I --
---- -- =-3 .i3i
0.__ .. - o - - -- °= a ~< .6.. . .. t3'1 ' i _ .. O 3.33
',3 . ..3,I L,,=<!I I ,
'!' * 3;
,o ., _" 1:.- _a
a -]
-__
- -

FIT-
9 5
, --°'.. r.
,, 5 t ,
In - ! 0
e .. .- -< " " ' , . = 4
0 XIM
I- - I-~
z-1 a Erlf
i - "" .J a. - '--
L - - - -I
I-I
I- ,,n I 1" t-
9.'-" - '--a.O0.I,,- , -.AL__ a'
-- -'-

The high-altitude data are also maintained at two times. Here,
because the nuclear effects may be more widespread, a grid of physical
data (chemistry, striations) is computed in addition to fireball and
debris properties (which are treated as overlays on the grid).
The optics system portion of the code consists of (1) an attack
generation event, which initializes the ambient atmosphere and magnetic
field models and creates objects to be viewed by the sensor; (2) an
optics look event (OLOOK), which sets up the sensor look geometry; 13)
an optics propagaticn path event (OPROP), which sets up the number and
position of sight paths in the sensor field of view for creating the
"scene" at the focal plane; (4) a sight path calculation event (SPCALC),which performs the integration of the radiation transport equation along
each sight path; (5) a simulated eptics event (OPSIM), which generates a
focal plane array using the sight path data and nimulates the scanning
and signal processing functions of the optical sensor; and (6) a set of
system events (currently there is only an optical track function (OTRACK)
modeled here) to simulate various system functions such as track, homing,
or discrimination.
The systems/physics interface structure is much the same as for the
radar code. The propagation and sight path calculation events access
phenomenology region data (e.g., fireball, debris, dust, beta tube para-
meters) by calling a subroutine which interpolates these data in time.
= The sight path calculation event also accesses a point properties module.
It supplies the time and location of the point in space, and the point
properties mcdule returns the appropriate data requested. These data
include temperature, mass density, chemical composition, cloud statistics,
striation statistics, earth albedo, prompt and delayed ionization, and
particulate optical properties. In addition, the sight path calculator
accesses preprocessed band emission data from external data blocks. |
7

2.2 SYSTEMS SIMUIATION METHODCLOGY AND StMPLE OUTPUT
This section describes the optical system simulation methodology.
The discussion which follows describes the use of the SWIR code by guid-
ing the reader through the simulation procedure block by block, and
displaying some intermediate code outputs.
1. Surveillance Sensor Dynamics (OLOOK). An example of how
the optics look (OLOOK) event sets up the look geometry for a surveillance-
type sensor is illustrated in Fig. 3. The boresight of the sensor is
determined from the sacellite position and a reference position, as shown.
The frame time (the time it takes for the sensor to complete its circular
scan) is input, and must be consistent with the scan rate desired.
Scanning motion is simulated by creating a frozen frame of the
environment at a selected engagement time and then sweeping over this
frame in a circular fashion at the appropriate rate.
2. Object Dynamics (OPROP). In the optics propagation (OPROP)
event, the object motion in the sensor field of view is treated by inter-
polating in time for the position of each object, and then transforming
these coordinates to the sensor coordinate frame. Objects treated include
nuclear bursts and their associated ionization regions, booster plumes, and
natural clouds (see Fig. 4).
The sensor coordinate frame* is defined by setting the z-vector
anti-parallel to the boresight. The y-vectcr is in the plane formed by
the z-vector and the satellite position vector, and is directed as close
to the satellite position vector as possible. The x-vector is chosen to
complete the right-hand system.N *ThThe block names are given here so that the radar can refer back to the
block diagrams shown in Figs. 1 and 2.
This coordinate system is used in generating the focal plane array.

'p IL
REFERENCE POSITION -- --- "" " SATELLITE
--- POSITION
/SCAN BY SENSORI TATION
o BORESIGHT ESTABLISHED BY POINTING AT REFERENCE POSITION
* FRAME TIME BASED ON ROTATION RATE
* CIRCULAR SCAN SIMULATES SENSOR MOTION
Figure 3. Surveillance Sensor Dynamics (OLOOK)
9gL

SENSORCOORDINATE COFRAME
y2
x
- -~#-#- SENSOR
POSITION- - -- -- VECTOR
*OBJECTS INCLUDE - NUCLEAR BURSTS (ASSOCIATED REGIONS)
- BOOSTER PLUMES
-NATURAL CLOUDS
*SENSOR COORDINATE FRAME
Figure 4. Object Dynamics (OPROP)
10

3. Object Characterization (OPROP). To characterize the objects
in the focal plane of the sensor, the code integrates the radiation trans-
port along a number of paths from the sensor which intersect each object.
Since these path integraticns can be time-consuming, an attempt is made to
minimize the number of paths used by selecting a relatively few paths and
interpolating between them later to generate finer detail in the focal
plane.
Objects or regions are divided into three types: (1) point objects,
which are objects whose dimensions are small compared to the sensor reso-
lution; (2) extended objects (such as fireballs), which may be bright and
cover many resolution cells; and (3) background, or other regions which __
are less bright or very extensive (cover the entire field of view).
Point objects can be characterized by a single path, as shown in
Fig. 5. Extended objects are treated by taking the object projection in
a plane normal to the vector between the sensor and the object, and select-
ing a set of points within this boundary. Finally, the background is
treated in as much (or as little) detail as the user feels is warranted
by setting up a grid of points within the sensor field of view. The user
selects the grid spacing in the Lnput deck. A default value of four points
is used as a minimum.
4. Number of Paths/Object (OPROP). The number of paths used to
characterize an extended object is a function of the object size and the
sensor resolution, as shown in Fig. 6. One, five, seven, or thirteen
paths through the region are set up for integration using the scaling
rules shown.
5. Example Sight Paths to a Fireball (OPROP). An example set of
sight paths used in generating the focal plane image of a fireball is
shown in Fig. 7. Here a striated fireball is viewed by a sensor on a
synchronous satellite. The sensor resolution was small compared to the

POINT OBJECT--SINGLE PATH
x= LOS xVEC
y ..- C x LOS
LOS
EXTENDED OBJECT--MULTIPLE PATHS TO POINTSON OBJECT PROJECTION
Figure 5. Object Characterization
-A
N-
A 44
12
VA

NPX =IFIX (AX/RESOL) - I
NPY = IFIX (AYIRESOL) - I
WHERE: AX,&Y =OBJECT ANGULAR SUBIENSE
RESOL SENSOR ANGULAR RESOLUTIONy
NPX =11 POINT NY=
y
2 .NPX< 4
24<NPXI~~~ 7POINTS NP<
y
4 <NPX
13 POINTS2< P<4
Ly
Figure 6. Number of Paths/Object
13

I OD OD~tIDOOD Oi ODO DODODD ODDDOn DDODDO OOOOCOOOOOI)OOD DDODOD DO CDDDOD OODOD O U O 0IODDO ODO OOri DODnlh#DDDDDDODOOnbfDDOD DODD Ui ODDD D oooroo DooDD DDDDODOOD flUDOO DOU OOO
I ODhDfrlDODO f'flUIOUD D DDtDP ODU0000DOODUOOODlOODOU ODOINi,.
I ODD~~lU)DDOODODOtDPf11OOD~nDlDOO OODO D~OUDOOOOrOODODOO409fin1ODvnOOnODO DODODDD'IDDDDDD 000000000 O0l*)
1000000 0IJDn~fl~fDDbfDDUOiDDV ilOD0fDUDDDLO0DDDD0ODiU,,olDOu'a 1~0DDD0DDDI00DDD0o0DOOfOO0DDIt0JnD0100TM~aIDDODDD0.0IIDUDDCDDLn,0L0
*?000 IDOMDOWDOOn 0 v T00 V itutfu000 01UIT UOOCO ODDDDOIDOUOU
1OOI)Dootfo~wjuITfl, tvt ilVS)DO0ODDO9D1UODO0DDUO000DDDDDC rD#D0OD000DDOunO0.0 *(DnDDDOODOVU i OP000000DDOOODDOI OO000000000000%DtO
IDUOODnOOMDDO-Iit tIDOUT~uTt'U ULLL ODDODDOOOOOO00000000000000000L ODODOOODDDZ000DL)Onno DoruoD'I-oIJUcno.Lf I-0 1 %161. vo it o S. roD~oooo
IOD DO 'JODOnDADnIOMtfl Tn000UonU, * "OO11pflOI~fL vD'OlUDODDtLOOOOOOnDDOoD~oV
10060000 DD nD00000L'J000001P UU UliJ T I I UUII tU *UOOD 00 C0~l~.11000000000000II0000000DDLJTIUU- TUT- l, tit:u llthJIUlOlUa SIOOOOO.000r O 0LUOCOL
e.2 t~0Olf0 0100000 *1~)DOnj~~D L i J1 ut~* u uT9 Jis 1100 0 JOOODOOCDOODD,.-1000000 C~DrAlDflCCDJt UUiU lit uoi T*IU if, v, SjL' DOODDD9')on ODODDO
00000o
E 100000nOL01f001 ti~)DOO DC J U i T QIulo itit, L0 IUf UL LI ~ .tIV00D0ilOt- lDODIflOO00DDoi lon D DU i tuIJ o ?it lu OffLI I t O D~iO O O I,.0J
1r~'Dno0tlD0Dlt0lpnmrnO.tioLnb,'U F ITr WITT jt~l- U U- IJ~'D. 1. (410 VfL C 000UDCD LID
I ODO)OOOOOU fDOC00 *U DitUOL 1'DODO~nn nD notC (-*U ' SOTD ODD OD0000000D
1O.4)000OfI'ntf0LJ Ii.2U000 ~ ut~ 0.00 L't 000 . 000 .4~l00G 00
100 ~ ~ ~ ~ X OD90m~l0L.Ti~~DD iliit. diansi' $OUDDOt0000LUC
FDI~~nnigureO 7. Exampl iiUti L t. Path for Fi0000eballO 0
*.Z00 )ODOO~iI0I~l000T0TUC'~t Ui~i IIiUT ii 'I ~ i~')lOD00OD000,0)02R
IOOICOODC 00. i tl i o SUCOPDODOOO14OO

object dimensions, so thirteen paths were used (denoted by dots in the
figure). A symmetric set of paths were set up in this case to model the
spherical region.
6. Path Integration (SPCALC). As mentioned, for each sight path
specified within the field of view, the equation of radiation transport
must be integrated from the satellite to the ground. The methodology de-
veloped in WOE 112 for optical sight path integration through multiple
overlapping regions of disturbance has been adopted for use in ROSCOE.
The methodology involves generating a cell list of integration
regions along the path (Fig. 8). These regions may be further subdivided
into integration elements. The cell list consists of bounding cells at
the sensor and at some terminator (the ground, in this case), atmospheric
shells of about a scale height in width, and disturbed region cells. A
ranking scheme for determining the relative importance of overlapping
regions has also been taken from WOE.
7. Sight Path List Cell Types (SPCALC). Table 1 shows the M
various sight path cell types that may be generated in the code and the
logical rules used in overlapping regions. Each cell type has a region
code and is given a rank; the higher the rank, the more important the
region. The region codes for all nuclear disturbed regions are identified
by the number 1000 and distinguished by adding a region index. The region
index is merely a counter of the number of "region kinds" intersected.
For example, the first disturbed region intersection has an index of 1 and
a region code of 1001, and so forth.
8. Example Cell List (SPCALC). An example cell list generated
in the code for a typical sight path is shown in Fig. 9. The following
information is given:
15
_ _ _ _ _ _ _ _ _ _ _I
j

II
1*1
* CELL LISTS CONSIST OF -- (1) BOUNDING CELLS
(2) ATMOSPHERIC SHELLS
(3) DISTURBED REGION CELLS
SRANKING SCHEME USED FOR OVERLAPPING REGIONS
Figure 8. Path Integration (SPCALC)
16

TABLE 1
SIGHT-PATH LIST CELL TYPES
Sigt at Reio Rgio Cce Disturbed Associated Geoetric Overlap
Sigt at Reio Rgio Cce Region KIND t-t 0 RAUK4 Logical Rules LKEEPb
Sun -1 -100 None of lower RANK
Mon -2 to10 None of lower RANK
Earth -3 -100 None of lower RANK
Cloud layer -4 -100 None of lower RANK
Galaxy -5 -100 None of lower RANK
Target -S0 so5 All regions of lowier PAIIKexcept ambient atmosphere
Vacuum 0 -- 0 All
Ambient atmosphere Shell index - 6.0 All regions of lower RANK
Amcbient chemiluminescent NOR + 101 - 2.5 Debris particulatespancake
Fireball Region index 11 to IS 10.5 None of lower RANKI 100
Ion-leak and CH--X patch~ 16 3.S Debris particulates
Low-altitude chemil,.mlnescent * 17 3.5 Debris particulatessphere
High-altitude chemilumines- 2 8 3.5c Debris particulatescent pancake
Beta tube 1 9 5.5 Debris particulates. fire-ball wake. and all otherbeta regions
Beta sheath *20 5.5 Debris particulates. fire-ball wake. and all otherbeta regions
Shock heated vortex 21 8.5 Debris particulates, chemi-luminescent regions, fire-ball wake, and beta rigions
Dust cloud stefi 22 1.5 All other dust and particu-late reginni
Dust cloud cap and condensed *23 1.5 All other dust and particu-debris particulates late regions
Spheroidal weapon debris. *24 1. Al reinoflerA'K
vapor and particuates except ambient atmophereloroidal weapon debris. 25 12.5 All regions of lower MM~
vapor an atcltsexcept amobient atmosphere
Fireball wav'e j26 4.5 All regions of lower RAK%
Debris loss-cone pa*tch 27 3.5 Debris particulates
NOIES:
*The WAK of disturbed regions decreases lirearly with age to a value that is almost one below theinitial value whien the a~e reac its one hour ana Viereafter remains constant-
bAppcfld to all entries *and regions of greater tK
Cii1e ch-iluiinescent, pancale is giver a fixeld age of ten minutes.
17

LINK DSP.I) tcNEG CISTIC KEEPU
S0133fl00111??00112nz 002-401o0no07O0000Co 3*S12II.00 0 0
1 0134010011201001340C 0 ilM0060010oOO0o 2nl 3,572a1.o9 0 0
a 011oS00133770013402 013i00000007?0000000 *50 3,572AE009 0 0
013330119010011209 0037?600000070000000 ZO I.S731I*0t 0 0
e01331100112030013$74 0131SS00000070000000 1o 3.5738t*0, 0 0
S01337100133730013112 0040S700000010000000 1q 3,15730L*09 3 S
sk 0131340133110013372 01316at,0000070000000 IS 3,STa6t#09 9 s
* 01330500133110013314 00474500000070000000 16 I.S7aE.09 1SO S I
In 01336300113130013316 0O5&510000u07000000 I 17 S716t*09 1s6 S S
Ii 01336SO01331SflO13360 01372ooO000010000000 100? 3*%7499*09 Is& S 3 21
Ii 01336100133630013366 013PIIO0000070o000000 l00? 3,57a4E004 ISO S 3 21 -
1't 0133S?001336S0013362 013P27o0000670000000 1001 5.575S1'09 0 0 It
Ii 01337SO0133*10013360 013P0O200000070000000 1001 3,%!71*Qq5
Is 01336700133SIO013376 0131M6000000000000 1002 3.57571*09 5 S 21
I& 0133t?001337SO0133?0 01301300000070000000 100t 3.579GE909 0 0 21
I~0133a100133610013320 0064S400000070000006 16 I.S?63E*09 0 *
I* 0133a300133170013322 01145I00000070000000 IS U.57IlE*09 0 0
to CI33a50I33100l3324 oilsaooooooaooooo 1a 3.577'u*09 0 6
in0133PI00133230013326 oliq13000000loO0o0000 1S 3.57661.9 0
2 0113100113SO011330 01142o0000070000000 1? 3.S7.oI*o9 0 0
2i 013313001332100133 oIjSo15o00070o000 it 3.SoaE.o9 0 0
2i 01335O0133310013334 01140600000070000000 10 3.%606f*09 0 0
Ia 01331100133330013336 C11aI700000070000000 9 3.56061.09 0 0
ii0133&10013350013300 0114a000000070000000O S 3,56S000O 0 0
U4 0133*30013337001331 01146100000070000000 7 3eS6111.0% 0 0
2i 0133#100133410013144 OllaS200OOO0lOOOOOOO 6 3.6490 0 0
2A 0131&700133430013346 01330100000070000000 5 S.SSI&1*01 0 0
IM 01319100133500131SO 013PY200000070000000 a 306SI61#09 0 1
3U 01339300133470013352 01376300000070000000 3 3.01909E 0 0
11 013555000133I13356S 0137S400000070000000 I 3*5022E*09 0
3; 011I1500133S30013556 01374300000070000000 1 3.5S26.09 0
3i 001?11001355001176 00o0110000007000000 0 1.0000E#15 0 0
3i 01I1tS0011II15S01IA 000121000000?O00Q000 as 1.0000E.16 0 0
Figure 9. Example Cell List
I Cell number
LINK A packed word used to find addresses of the previous
and next cells (datasets)
DSPWRD Pointer word in the DSA scheme which allows one to
access the dataset for this cell
ICREG Region code for sight path cell terminating on this
boundary
DISTIC Distance alcng the sight path from the sensor to this
cell boundary
KEEPR A packed word containing subordinate region indices
(up to five subordinate region indices can be stored)
KIND (last column shown) Disturbed region KIND
The cell list contains null cells (ICREG 0) at the sensor and at
the ground (DISTIC = 3.5824E9) and twenty atmospheric cells (ICREG = 1-20)
from the ground to 100 km (DISTIC = 3.5724E9). A target cell (ICREG
-50) of zero length has been inserted at 100 ki, and six disturbed region
cells (ICREG > 1000) have been added between 66 kn and 75 km.
The cell list would then be used as a guide for the integration of
the radiation transport along this path. Each path would be integrated
and the resulting information passed to the focal plane generation block
of the code.
9. Focal Plane Generation (OPSIM). To create a focal plane
image of the environment, the code grids the field of view into a fine
mesh- (the mesh size is taken as something smaller than a detector diameter),
and then uses the sight path data computed at selected points to map the
intensity. Recall that we previously mentioned that objects or regions
in the field of view are divided into three types: background (grid),
t extended objects, or point objects, and that each type was characterized
_19
- - ~-NMI

by one or more sight paths. These are used as follows in the focal plane
development (Fig. 10):
a. The background is generated by taking the sight paths asso-
ciated with the grid and using bivariate linear interpolation
to compute the values at each cell in the mesh.
b. Ext-led objects are then added one at a time by taking the
sight paths associated with each object and following this
procedure:
* A rotated, magnetic, field-aligned coordinate system is
set up, called the F-P frame.
The maximum and minimum region dimensions in the F-P
frame are determined.
For each cell in the F-P grid, the code determines if
the sight path through this point intersects the object.
If it does, the three path datasets nearest this point
are found and used to interpolate for the mean, the
standard deviation, and the correlation lengths of the
intensity distribution at the point. A normalized random
sample is generated using the correlation lengths and a
one-point recursion formula. The intensity is then com- M
puted as the mean plus the standard deviation times the
random sample.
* The point is transformed back to the sensor coordinate
frame and the intensity at this point is taken as the
maximum of the computed value and the old array value.
c. Finally, point objects are added to the array at the appro-
priate locations specified by their sight path location in
the field of view.
20-

BACKGROUND
* PLANAR INTERPOLATION OF GRID DATA
OBJECTS MEAN
* OBJECTS ADDED ONE AT A TIME
e PLANAR INTERPOLATION OF OBJECTDATA FOR IMEAN INTENSITY
s CONSTRUCTED IN COORDINATE SYSTEM(ALIGNED WITH FIELD
-- STRUCTURE • PLANAR INTERPOLATION FOR SIGMAAND CORRELATIONS
* RANDOM SAMPLES GENERATED USINGONE-POINT RECURSION AND CORRELATIONS
k INTENSITY AT POINT FOUND BY COMBININGMEAN AND RANDOM COMPONENTS
" TRANSFORMATION BACK TO SENSORFRAMEFINAL VALUE AT GRID POINT TAKENAS MAX OF CURRENT AND OLD VALUES
POINTS
• ADDED AT APPROPRIATE LOCATIONSIN ARRAY
Figure 10. Focal Plane Generation (OPSIN)
21

10. Examples--Focal Plane Array (OPSIM). A number of test runs
were conducted to determine whether the code structure up to this point
produced reasonable outputs. The procedure used in this verification
process consisted of (1) inputting fictitious values for the mean and
variation of the integrated intensity for each sight path, (2) using
these data to generate the focal plane array, and (3) producing contour
plots of the array. The contour plots are produced by plotting an alpha-
numeric character or blank for successive increments of intensity ("A"
being the lowest intensity, and "Z" the highest). Thus in a region of
increasing intensity, one would see a character (or a repetition of the
same character), followed by a blank region, followed by a repetition of
a higher-order character, and so forth. A number of these example out-
puts follow.
Variation in Mean Intensity (Fig. 11). Contour maps were produced
for a case where a single fireball was being viewed by the sensor. Two
sets of inputs were assumed for the fireball intensity; the first assumed
the mean was constant and the variation was about 10 percent of the mean,
and the second assumed that the mean varied with the depth of the region
intersected, and again the variation was taken as 10 percent of the mean.
Several key points are shown in these plots:
A reasonable representation of the fireball projection has
been produced. In this case, the fireball dimensions are
large with respect to the sensor resolution, so the maximum
number of paths (13) were used.
The striated nature of the fireball is easily seen in the
first plot. The field direction is about -103* ccw from
the horizontal x-axis, and correlation distances of 0.6 km
(equivalent to 0.0167 mrad in this example) across the
field and 1000 km along the field were assumed. This shows
that the one-point recursion formula produces reasonable
outputs in the two spatial dimensions.
By inputting the data, the mean can be held constant and the variationdisplayed relative to this focal background.
22

. .... . .. .. .... ... .. ... ... ..
... .............
............ .. . . . . . 4
................................ ........
........... ... .
.. . . . . . . . . . . . . . . . . . .
04.I.t 6 .............
.14*U..... .vuS.vv v v
I. -yV4.vUvvv vv~v.......
I............. c. 4 9.
.............. .44* I 0444 . . .4.4,4 ... .....*....4 ......
.. o I- ..... . ...... ... 04,001 . . ........ ......... 000 4040 . . .
# 0 ...... 04.44..4.... * 4440 0 44 . . .
0 ~ ~ o ...*.......4440.....,. . . . .
4. . .4 4404 ou * 4044 44040. ........
.......... ......... .........
2.. .. .. .. ...............
. . . . . . . . . . . . . . . . . . . ...................... ....................
*,4440......................*...*.P 9 9 4w,
4.............. ...4.. .,.. . . . ...........
........... ... . ........ ..
op.N.. . . . . . . . .PPI........ :: .....
I... .. .. 0 ........... ................. ............................i4. . ........... .. .. .
.....................
.................................... ..... 0 ........... .......... ;..............................
-iI.. ..e.C 1004 0. . . . . . . . .40
. . . ..) MENVRESWT QAR FTEDET9FTH*EININESCE
Fgr 11. Varition in44 fe0.........
I. . . . 4~04 44 $ 4 4400 . . . .
oais , o T

The striations are somewhat less distinctive in the second
case where the mean falls off from the fireball ceater; but
the representation appears to be reasonable.
Spatial Correlation (Fig. 12). The correlation distance across the
field was varied to further test the recursioa formula. The plots eh3w
the same fireball with assumed correlaticn distances of 0.06 km and 0.6
km, respectively. As one could expect, the plots show that as the corre-
lation distance increases, the spacing between striations in the realiza-
tion increases.
Tire Correlation (Figs. 13 and 14). To test the third dimension of[the recursion formula (i.e., time correlation), contour plots at look
times of 0 and 1 second were made with two assumed correlation times.
The first set (Fig. 13) shows contours for a case where the corre-
lation time (10 s) is large in comparison to the look interval (1 s). As
one would expect, the structure within the fireball clanges only slightly.
The next set (Fig. 14) shows contours for a correlation time much J-
smaller (0.1 s) than the look interval. Here, the random samples generated
at the two look times are nearly independent, so that the realizations of
the structure are completely different.
Multiple Fireballs (Fig. 15). Next, a run was performed to test
the logic for generating overlapping fireballs. In the upper part of the
figure, the single fireball used previously is shown. In the lower figure,
a second fireball of the same size but displaced to the side has been
generated. This second fireball has the same mean intensity and structure.
The plot shows that the fireball profiles are clearly defined, and
a reasonable realization of the structure has been generated.
24

S* ............. . . . .
.....................................
....................................
................... ....................... .... .... ....
.... ....
.. I .........
0 ............ .. 0o 0005 . . .
o ~ ................
......... ...... .0 ...........
A) CORRELATION DISTANCE .06 km17
.40co0 ..... .....................................I..................
..................
I.................
...................
v............... .
I........................ .. ...... VVV .................... .... . .............. ...........................w................ I..................... ... ..........1 ....
.. ................
..... I g . . . .
. . . . . . . . . . . ................................ ...... Jt. O
.......... . . . - .. 0 ............. . . ..
I. . . . .) CORLTO DISTANC .60 k
Figure 12. SptialVorrelation
250*
AcWO
0AW

CORRELATION TIME • 10 SEC
..................... :: "' u4 09tNit................ ... ............ -M"*t~
..........q. 14 tt #$ I~ 41 4 II I I'a6,Yl U.. t.........li......., Svfv .:":IHP ~ h ~ I-
. ........ .. .1' .I -4 ....I 64 1..
........ a., 'i.........l........................ .... ..
............. . . . *~b4~tltIO#
.iJilliiiiIIl i J 4 1 I. . .SlV lIiIAiiIPI*ii**#i9$ti~tii
...................... .I ..................
.................. .; ............ V ............. . . ............. ....... a..............
a....................a~ , t VVll............. Q6*1 4.,av..,..s.
.'an a~b Uvv V1 1YtW ....
............. 'V ......VIV W...........i..vvv %Va.V ,fti b~ .... !.... In
ba ~ ~ Is 16I. ..
............. 11 VM wv it.
.... a.. . .............. ya? . . .................................T.....
....... ... 1.4
a.....................a ?V ........
.. ............... ........... V IV I al*Ilt661l
............................. . ... SkI.9a.,tttr. .................... . .v..a;.,,...
. . . . . . . ................. I
................ * .. 16*. . . . ..... ....
T .......... I.i.......... on$ viVM $l$#**il
a ......... a..a.V.....l 14.Li. bj ... l
.an bll411l l* t a. . u aaa IViVw V WVl+ a....aal it.l nV...njI aaa.,.l ra
V U* v v a V V VU aal
a. . ~ ~ a wVIM av - U IaVfllY i-W.fI...............a -. go. -gu -n3 V.f-g.
|. .**.. * .v a + I at at U I Iflult VVli .a..n. 0Wlll y$*Baatll*hitl
.4.. **°°l*l.......................... U U VV'NI VUi .i aini tqaaIIfl
ta +...-*oe~~*°l vg4 a. yyIv+w yt ..~l .llllllll 4.111 -I4
i t 4a- 't i...... .. u U UV Jl-w :ata.
............... i. f'6.6&I$~U
B) T 1 SEC
Figure 13. Time CorrelationP
26
• ~ ~ ~ ~ ~ - - -***+le*i*l ++ ~¥ l t~~ =l++lllIl4+~l

CORRELATION TIME .1 SEC
..................... ............ ................. :...................................................... ....... . . .
I,..................
*. . . .. . . . . . . . . . . . .....
.......................... ..........................................................................................
............................................................ --
............................................................
...................................................... ....................9... . .. . .*............
22......................... ...... .... :: ...
I................22.................
-V............. ......
. . . . . . . . . ...................*. .........
S. . .. . .............. .
I...............iUJI .......... 11..... .
22.'~*................~
..................22. . . . 0V2 ..................... . .
I. ..~y'9 Wi 9~~y ~9. ........I ................... . . .
............................. .2
.. y..... y . . . .
V 221 9 922 92. . ......... ..
t .............. . .... . .
............................................
........... ...................................... ................
I...........2............... .......... 22-W2
. . . . . . . . . . . . . . ...........................
VV .V..........U..............
22..............IT, ........
..... .... .... ..... .... .... .,.......... .. .
A) w T 0 SEC.. .. .. . .. .. .. ... .. .. . ...........YW U .........
I 'toll...a.. . I............. .
U 9941y81...I.......y ....... ... .. ... .. .... .... a............... .
S................... . . . . . . . . .................. ....................
.. . . . . . . . . .....................................
I..............................9680~8 T I.. . . . . . . . . .
. . . . . . . . . . . . . .. . . . . . . . . . . . . . ..tio
I.......................
M -- o t t -- 1 C- - C ------ - - - - - -
* t:< +Ao't0:)0.000l ++I000'0 C +0oa 00001901 _._ _ ____-
10404tte~r00e0DODD it I00 I 09!0 %+ f + 000 0, 1 DOOfrDOOOD+IO ODOODOOfldIOOOf b Oflrlb
. . ., f. 000000 5 .p++i009 0 0 -O00+ = +* t. ++ + :Slc, +Om 0 0000 0010 l00 001 - i 0ll eillllli
.--. . .- . -CO t ot P .. o 00o000000000000 0010 Ilb)lOISOOO
-:Tf.o1 D.C. to t iUCofl0 flt00"tI
I zo o toooo cooc ooobsnbenno*
.+ +-. + ° tO t i=v SOOOOOOfOd+POfl OOO~IO*ll0000000001
t1i nnr.. 9+001,~l 00000000000000000fl000000 I• - '- I - " I t. --n.t. LrU XtlO.' 50000000Di00000000000000000000
* -. I. 1 4,. .' 4Wt4.i 0ll00000000000000p000000000000ll
. . .. - - S - 'I ) ; it I ow S ' IOIO ODo#A00004000I09000 I-. )' .... I+ vrv 0*0*0 I 00 (=[o~o000flb001*u0O00.n00000
"t',.o 000000 00:0c0000¢00OOooooOOOOO
-+-. p+ + +..,O¢-+ _tin * + c+. O so0 5 0000 00000000000c000...- +ooo¢cno+ no C+ 00~,0 050000000000D. 000"cooo 090000 D
* ~v I" - -* -acto 0.9 Do .D 0 499
A) SINGLE FIREBALL
*.oo .'c +r t -oro ,o.stnO :i: :;l=lPtO) ~i V TT--?-+I.I__--_ -- ._______-_______ __
I0-,-+.,,0000000.0000tnI 0 r.t
-. )'0o te. - .ou Do "
....... bt0 ..+t'0c0 ".+< .. l..-. o. 1 , cc,,0 oo...mo00 .o-.
..........+.. .....+:... . . + + +
• .0to r=+m 0- 00-_ 0000ft00005000+ 000*l0000 lO WSU W3Sq-S+-
S +:+ _-_-, -+
.... . : ..................-- - -- -............ . ; ....b..... . .00-"0-- - ---9W b--_-W i ib
) SINOVEPI FIREBALL S
FiVe1 .000ul iple Fireba1lls
'ile ::0o w ol *o * -m-Ot - - --
0_"- --0-__M T , __ - - - -.-- m- ....- ..
t0005500 ~ ~ ~ ~ D ------- --- 0-?-1 *0 1 U ~ W ~ S - -
-t 0.ol~to o1 z0 -t oo 7 0moml J~~0 5
O it t0',ttt 40 00V LOJ I o. S H. t.....O I utO IU IO SN f
wwu W, uI no. ov 0 lo. 0 uil
tsro00500o0 1 7; uw. U IY IvD $1S Sv S~
0~~4Atr0V0000OO0 vI I %I~U0 W vu -Lgew SS0-
.. . . . . . . . . .....0*04L it I WsA;0 u 1 u vIS ffl490)
mon-:5000* 31111 moc 000000 T10o bo00om 090
-± - ------
........ .. 00 ------- ---- 9 bw~-
B) TWO OVERLAPPIN'G FIREBALLS
Figure 15. Multiple Fireballs
28

Multiple 0bjects--growth with time (Figs. 16 and 17). Another test
of the muJtiple object logic was made where two different object types
were assumed: a fireball and a beta tube. For simplicity, the fireball
and beta tube were assumed to have the same mean intensity and intensity
variation due to structure. The plots (Fig. 16) show (1) the fireball
alone, and (2) the fireball and beta tube together at a time 10 seconds
after burst.
A second set of plots are shown in Fig. 17 at a later time (20
seconds after burst) to show that the program can produce reasonable
object representations as the regions grow with time. Note here that
both the fireball and beta tube have expanded radially about 30 percent.
11. Sensor Scan (SPIRE). As mentioned above, once a realization
of the environment has been created in the focal plane, the sen5or scan-
ning motion is simulated by sweeping over this frame with a detector
array. The scanning motion and number and position of the deteztors in
the array are specified by the user. In the example depicted in Fig. 18,
a surveillance sensor which uses a circular scan and a simple linear
alignment of four detectors is assumed. Because the focal plane array
is gridded with a spacing on the order of the sensor resolution, the
scanning process merely consists of picking up focal plane array values
in the proper order for each detector. The output consists of a data
stream for each detector.
12. Optics Data Processing (SPIRE). The sensor data processing
model consists of over thirty processing algorithms which can be used in
a building-block approach for modeling a specific data processing system.
A simple example of this approach is shown in Fig. 19 for the sur-
veillance sensor mentioned above. For each detector, the focal plane
array is scanned to produce a data stream of samples, detector noise is
added to each sample, the data stream is smoothed, adjacent samples are
differenced, and a threshold test is applied to detect targets.
29

11) SEC AFTER BURST
tP000tttOO- ----------
-~~~~ ~00000,4 ~io~fl~OOtoO0
'it ter:I ott~t oM6~0000=00000i~o0tootfo. M0t.0"ttoc O . 1010 it00 9900 90-M
Cv ~-C'o~,tO: ge't.. O'000,000000f
or o ooooooorooosoo~oooo~to~f~oflno~moooo~t~l~tt~otOO't~t~tOO~tftOO~tttO~tflO~lfm'Coot
't~rr-O-t ott ,otvv;U otooootoo to0 0
o 'oeee'too5. it I, TIVIT -ln Woooa02j.Erxn
Ottu?. to u lt1tA ~ llO~elb~t~t
It V. It '. w 00 0 .- -
"ttrltttno 1- 11 t ,t~i Lot -v v Met
i'ttt e 'iC~l.~. o f ilt 0 U ts Deems"-NO --.- --------- --- -t00000l00l0000
:ntrrtntooo ~ e~ttte It U000 CiCc~ettt-: t"mt am l~tt 0 C
C~c~i~.i~.t0,::~Ct ve~ .r . i Doe to--- ----i----2t 2. L
:-t't~~~~~tot------- t- -----0 0 0I00 * S WO l
Cttr.tnt 091110110441o owo to io, o w10 aA .2:L
Aw ) FIREBAL
I.0. *"be- *WW"
Fi u 16. Wllil Objects
UWI mvwI
30n Is
2~~~ of I=V

T 20 SEC AFTER BURSTV.~ -----------_-------------
.. VU *C V CC ~?t3C C*CUCCAND ------ ------------ _________________
tUUoW 3.NU INI W U U U UU U PS U U WC3 C C 3O3CUCUUUIN OWS UUI969100SUU
C ~ ~ ~ ~ ~ ~ ~ D Do* . .C 30C* C1StC*N06 0-t CCCCCCCC ----------------
C ~ ~ " to~ CCCCCCCCC ~ ::Cso 3 C C C oC ootoo ow c m n p ---------I N ----
C 3C CC C CC3CC3*30C31N C .UC UWU UWU ASU UUU SUC '3 3 3* 11I' CCCC3ClCC .- ZUCeehSW SWISUS USSC ~ ~~ ~~ W3333I~3 I? C30CW OW -T
:wcCCUU S33 -At. W t IU:-2 M:MM23C3CLU W3 IN. ii 3 ~ f CC 13 I
C1C33wCCI3 t-. wV I UV U I U t ZZ
C Tge'31 00 *.CS *.CUCC W W53 66 0 .3300
:' CCCI WCC :rV10 33 M U W 731 IT U CCCV ~ ~ ~ ~ ~ ~ t 331 W"3CCCCUC 3 333 CC 1 U 1
CVIC31CCCCCtlWI 33I. 3 133 C vI
CCI 3113313313 VII MIT 3 v lCvUC U I U Iinu MUN*~~~ ~ ml.tv W3VC33CC a I3 3' 11CC 3133 33
CV~3-to3C~,,C aav II3 11 VC 131UICMA1CAC nOC~~IV3CICV 31. II 33 II 111 VVI 13. 1C C11131C 3333
CV C *.Ct CCIV - ,31 ------------------ - -------03 --
wil.4U13 I' CUJ II W13V3 3 U333)3 3NKILW an
I WiI "I3 U ;MM I 33133 , 3 113333 41100 0so
VVn 1J C.o' :rM "rDvIl W3t CCV 333143 um1 1, I W" UUUU a
C ~ ~ V III t UWAC1 I1 3333333 19CCuuu 30339WC .t. 1 1111 j3.31 I v .33333.CCCJ3 to#"M
CVlf - U %.W I TTI vt I WC -33 -- ---3333At O f h
.~~~VC3M VM 1. ,W I~tMAv "DIVI 33 3 ACI U UIV 1w: LPA. %W 3333 WHOM31.V3 113134 N U S
0 0033
11 I'lla 111C I3C3 M.4C1 NW USSUSNIta. V LIC 1 fil LN 33 I 3313. 001 993030030N3a
C..,I'l w,33 CC V CIV3 U311333313Mp3 Ia ?Tit CC C v3I u3 U L%4473331,
CCC4 I3C 3 313 V -~ P MOIM'U:D:5tVCC 333 1313 WWW530 06S099090"
1'.5;M CCV *%- CCC U3313 W,331413)301VCI Ili-3 133090 * CC 33NUM U C 33 3 C3IC
?I u.- 'v1.Cm
wvAA t C V C 9
C'JcB) FIEBL A v. BEAUBE u98
Figure ~ ~ M 17.M ilil Obets-rot With Time
'I 31 .,u MAKM

FOCAL PLANE COORDINATES
Y BORESIGHT
x-
SENSOR POSITION VECTOR
SENSOR LOCATIONRELATIVE TOX -Y ORIGIN
Figure 18. Sensor Scan
32
_____________________________________________ ______________________________ ___

INPUTIFP ARRAY *J
NEXTOUTPUT A -- RAW SIGNAL AT SENSORBRACHOUTPUT B -- NORMALIZED SIGNAL
GAUSSIAN OUTPUT C -- SMOOTHED SIGNAL
DIF----N OUTPUT D -- DIFFERENCED SIGNAL
OUTPUTTHREHOL ---- ~-OUTPUT E -- TARGET DETECTIONS
Figure 19. Optics Data Processing A
33

Z
Outputs are produced at several stages in this process. The raw
signal as it is sampled from the focal plane is output, as well as the
same signal aormalized to the sensor NEFD, the cignal after the addition
of detector noise and smoothing has been rerformed, the differenced signal,
and finally, a flag to denote target detections (samples that exceed an
input threshold).
13. Surveillance Sensor--Example Case. The sensor scanning and
processing functions were exercised for the following scenario:
A surveillance sensor attempts to detect a booster which
has been launched just prior to the sensor scan of the
launch site. A nuclear burst which has occurred just 10
seconds earlier is at an altitude just below the booster,
and produces a high level of background radiation.
The scenario is shown in Fig. 20, along with the focal plane gen-
erated by the program. The fireball and beta tube were assumed to have
constant mean intensities of 20 dB and intensity variations due to
striations of 10 dB. The booster consists of a single point in the plane
(the character "D" at the center of the plot) with an intensity of 30 dB.
The data stream produced by the scanning and processing of the
focal plane data is shown in Fig. 21 for one detector. The output con-
sists of the time at which each sample is taken, the detector number, the
central wavelength for this measurement, the position of the sampled
point in azimuth and elevation off-boresight, and the five processing
outputs mentioned above.
The data show that the sensor is able to detect the target in the Ipresence of the noisy background created by the burst.
The intensity contours are plotted in terms of signal/noise. Signal/noise is defined here as the irradianceNEFD.
34

SCENARIO
- -.
SESO CHRCEITC
BAN 2. 2. -
A IL-FVE RDx08MA
,1 W
SCAN PERIOD =1.3E-3 SEC
SCAN LENGTH =0.8 IIRAD
FOCAL PLANE CONTOUR MAP
.444 1144444'44.441*44444 C (ft ((((ft C t c cc 44414Z44.414414.f....~* as ccA44 ttt ttcot etc cc 4 44~4
-t cc matUt "t( c 414144
244 41: 4~1 44~ C t (( emS*4414
4441'4 4411 444414 C eft (((tc ccfi cc 11144Z4.44444.4444144144 C ftc tttt U ft 4441411
.44 *t1'.441.1444144 f Ut two C ftt 414444e44
249-9-6...&4-. ---------4Is C tc 4t 1-1 *144444444
44444 4441441 t Ut C c ((Ut t CCC?44Sh4..44. I11 ftc ..... C (Ccec
........*.... ... ft cc (f (acc ft f m8.460I; CI C44 14 144*4 t Ut ( t C C tic
14a144...14.C C" (CU cct etf 4 M 4atcI
14414411444 0 ft (f =t (e cc(. . . .Ia.a*I*... C C (f cm Cut 9 mC144144444a4u4 S t (t (( t t t c . . .
144414444 PC44 t Utc tttt Cr (Ut . . .C14444 t (t, ft ge ccf ( . .. ...
1444444 CC44 t r et t tftf
1 4 4 4 4 4 15 t Ut ef~ U t t---. . . . AA 0 tr U t (((ft Ut Ut~c11444445 C t ((((ftm Uc9t C~t tt -,= t e C9 I...................f t ((t U (t *4444414 44444
I4.444441. (C U C ((ftL U t U t'444441 4444444
t ta CUM zu 44C
......... U U= t U tc141 44444Emaeu144444 444444 144 em ((( (f 4 --4--- 4- 4 1 4 14 1
144444441444,4444141414.4d1444 544444 44441U4. 4 444
------ ----- ---

*55 ..r ~ st-' tfiatIl.. staks~r. 04-st Uto S-C0140. DIFEarCED 145411 P I * U5 *.3 t5L *!.t 3GA Z.L ;iCZ.
%tc (C~j to...s cili.,. mlv v.0 Lu16
?JJ .. - a I .. q.4fu J W * -4.4. fg~f..0 S.Q .. *3l zsa
-. Wl~t.4 S.SAI S.05? . ~tlls.. 2QkftV. I 5illt ..lat
5- * I.~. *?~-f- Plvf*.s .lla76.14 S.* V4~l iuilzllI lillil~lil
I %.--5 -J5-17. *'Issa *.f.re I17.5 257.44 1.6 ullhtlllli
31.'51 I i~'-11 .7557I.,. .5505 1&f5 16.1s 2..rj 5S.1.2 lllt
~5*~.47 *~s . 1~.5 435.1 *~s6s5 .0.161.a3 244P.. .1.4s S11118129lli
q5.-5 * .-. 5555 .. ?est..I .4511-as 2.? 21.5 .5* iiitli
j-* *.lt .!'1W-t.5 *1 -s 1~srAl 27S.. J,1*s .2.6 ilttllt
Arlfw Is :.It55 .pf5 5155 *j5 3 277.0 211.6 -. 111I.stsa
."15.S O43.3 IM5.3~ 270 TilitFIl5'*'557 .~. .25t'.I '5sS.~5 *6555.. . *7k1.8 -*5.Z Vies* 4.67. 5 .,,t
-- ~ ~ ~ ~ ~ 4 Sea5.l *%%.5 *77. .& 47.? e.07 uuil
Figure 21.6f-- Surveillanc SesrlEatput
_ _2 _36. 368331

3 MODELING OF INHOMOGENEOUS REGIONS
3.1 INTRODUCTION
In the ROSCOE simulation currently available for radar and satel-
lite communications, two forms of inhomogeneities are considered for the
ionized regions that affect propagation at microwave frequencies. These
are the fireball surface bumpiness responsible for radar clutter at low
altitudes, and field-aligned striations within and adjacent to high-
altitude fireballs.
Extension of the ROSCOE simulation to include effects of nuclear
detonations on infrared systems has necessitated some additions to the
set of structured regions modeled. Fireballs at all altitudes are ob-
served to show flocculent structure inside the bright fireball, at
frequencies in the visible range. This structure, usually attributed
to Taylor instabilities during the initial disassembly of the warhead
debris, should be present in the 2-5 pm region also, and at high altitude
evolves in time to form striations aligned along the geomagnetic field.
In addition to this structure inside fireballs, other irregular
regions present in the visible and SWIR include beta patcl& irregularities
and light reflected from clouds. The beta patch irregularities are pre-
sumably causally related to corresponding structure in the fission debris
at higher altitudes along the geomagnetic field lines, and will be
modeled in some Ls yet unspecified way within the ROSCOE simulation.
Reflection of solar and bomb-thermal light from fireballs is being ac-
counted for separately, so this section deals only with the modeling of
radiating structures at high altitude, the striations within and near
high-altitude fireballs.
Even the surface lumpiness at low altitudes is not modeled directly,but only through its effects in extending the reflected radar pulselength beyond the extent of the specular reflection region.
37 iII4
A - -....

ROSCOE presently calculates the slow growth rates of striated
regions, assumed field-aligned at all times, from the gradient-drift
instability as described in Volumes 6 and 18 of The ROSCOE Manual. The
growth rate for this instability is
a (Vi - Vn) V1 Zn n seconds (3.1)
where V-i V is the relative slip velocity between ions and neutrals
and the component of the logarithmic gradient of electron density ne
perpendicular to the magnetic field is used. Thus striations should
form from the gradient-drift instability, wherever a gradient in electron
density and a slip velocity between neutrals and ions coexist. initially
high-altitude fireballs have strong electron density gradients near their
edges (although ROSCOE treats high-altitude fireballs as geometric over-
lays with constant electron density across planes of equal altitude). -
Thus fireballs should striate on the surface soon after magnetic contain-
3ment is attained. Other regions identified as possible sources for
striation growth by this mechanism are the fireball core and the fireball
bottom after this region has passed through its apogee and falls back
into the atmosphere.
Thus high-altitude fireball structure of relevance to radiance
variations comprises initial flocculence, presumably isotropic at early
times, but growing with time along the magnetic field; surface striations
around the periphery of the fireball; and volume striations throughout
the body of the fireball. These may all be modeled with different para-
meters as regards size spectrum, degree of structure (variation of
radiance), and relative correlation distances along and normal to the
geomagnetic field. However, the modeling must be consonant with the
current representation of generalized high-altitude structures, whose 4form is discussed in the next subsection.
38

3.2 GENERATION OF RADIANT INTENSITIES IN THE IDEAL FOCAL PLANE
During the initial structuring of the optics routines for ROSCOE,
a particular concern was the question of how statistical properties of
structured radiating regions should be represented in the patch plane,
or ideal focal plane, and how specific realizations of how these statis-
tics should be generated. The two basic approaches considered were:
1. Accumulation of statistics along a number of paths, each
corresponding to a particular point in the patch plane.
The number of paths must be sufficient to describe indi-
vidual region boundaries in the plane. A specific
realization is then generated from a recursion formula.
2. Calculation of statistics for a number of lines of sight
within each object separately. A specific realization
is then generated for each object, from a recursion for-
rmula, and superimposed on the patch plane along with the
specific realization for other regions.
For the specific case of sensors at synchronous altitudes, stria-
tions in regions ar 100-.km altitude look about like those at 200-km
altitude, because of the great distance to the satellite sensors. It
would, however, be dangerous to capit:.lize on this fact by designing
the code in such a specific way that later versions for other sensor
systems would have to be restructured in some major way.
We present below a method for generating correlated intensity pat-
terns iu the patch plane, together with the equations necessary for
extrapolating, interpolaLing, and joining different numerical sequences
in several dimensions, when the variance of the computed values is per-Wmitted to be any arbitrary function of position, and when the spatial
autocorrelation function has two orthogonal axes of symmetry. The only as-
sumntions are that the statistics are Gaussian and that the autocorrelation
39

function is exponential, with a different (but cons#-int) e-folding length
along the two space axes. This situation is felt appropriate to the
case of an infrared sensor scanning in some arbivk, -.rection along high-
altitude striations, where the magnetic field pro..- s an automatic elonga-
tion of the luminosity parallel to the field. Time decorrelation due to
relative motion of the line of sight through ti. striations is also assumed
to be exponential in time.
Consider a two-dimensional array of intensities Si,j , which we
take as having already been "detrended;" i.e., the smooth variation of
intensity as the line of sight sweeps through regions of different total
luminosity has been subtracted out so that we need consider only fluctua-
tions about the mean value of zero. As the line of sight moves, the
fluctuations of course ch3nge also, so we ascribe a variance ai,j to
the signal, and furthermore we assume that there exist two different
exponential correlation distances in the i- and j-directions. The total
intensity (which is assumed detrended) and variance are computed from the
known fireball parameters along a line of sight designated as i,j , or
along several lines of sight. Our problem then is to compute a "reasonable"
representation of the expected intensity fluctuations at other arbitrary
points, and to ensure that all points correlate properly with themselves
and each other. We would like to use a simple recursion relation relating
the next value at i+n,j+m only to Sij by an equation resembling that
for stationary Markov processes. We want L. computed value to have the
following properties:
2 i
a. <Si+nj+> Oi+n,j+m (3.2)
where a is the variance of the signal.i+n,j+m
b. = nm > F (3.3)i+n,j+m i,j i,j 'i+n,j+m
A discussion of the possible problems engendered by this choice is givenin a later section, with some suggestions for improvements, if desired.
40

Here,
F n e-nAx/Ll
P m =e-mAy/L2
where L and L2 are the correlation distances along the two axes,12
and Ax and Ay are the linear separation of two neighboring points in
the mesh to be computed. The third property,
c. <S. .> = +> 0 (3.4)3,j i+n,jI
is automatically satisfied by the detrending.
Let us try a recursion relation of the form
i4-nSj+m i J., + _ 2nP 2m1-F - R. (3.5)
0 i+n, j+m 1,
where R. is a random Gaussian var7ate of variance 1, as are the quan-
tities S. ./o... This equation is seen to satisfy the three conditions1,0 1,J
above. Furthermore, the process may be extended to the values S
where n' > n and m' > m , merely by successive application of Eq. 3.5.
Thus
S SSi4,n',_ = Fn'-n e'-m i.n,j+
0 i+n' , j~m' °i+n,jm
SF 2(n'-n) p2(m'-m) R (3.6)
This clearly satisfies condition (a), and if we compute the correlation
with the previously computed Si, , it is seen to obey (b) too, since,
from Eq. 3.6,
41
:Jn

<S S .> ni-n m'-m
i+n',j+m' i, F .>i+n', jm i i+n,j+m i,j
= Fnn pm'-m Fnpm ri (3.7)
Therefore the sequence may be automatically extrapolated to larger values
of n,m in steps of arbitrary size. (The case where either n' or m'
is less than n or m is a special case of the interpolation equations
to be discussed next.) From symmetry, it is also seen that the sequence
may also be extended in the other direction from the lowest values of
i,j . But now the question arises a3 to how to interpolate; i.e., having
computed S j from Eq. 3.5, what do we do about, say, S.i+n, j~m i+n,jIm-1
The mere fact that we have computed the point at i+n,j+m by drawing
from the random variable R automatically sets a constraint on the value
of Si+n.-l,j+ml , since it must now correlate with S as well
as with S.
Let us compute the two other corner points, i,j4m and i+n,j
which, by Eq. 3.5, are given by= m i 2m
(S/) i Pi(S/o). . + 11-P R. (3.8)i,j~in 1,jJ
= n (/,)2n(S/ S/)i j + 1 - F R. (3.9)
where we are henceforth using the subscripts only on the quantities
S. ./a.. (S/F).1,j/i'j ij
These two values have unity variance, and clearly correlate in the ap-
propriate way with Si,j but not with Si+n,j-Im in Eq. 3.5. The
reason is clear. Whatever choice was made of the random variate Ri'j
in Eq. 3.5 sets a constraint on the separate value3 R. and R. in13
42

-•.. - - - - -- --7_- --
R
Eqs. 3.8 and 3.9--which constraint may be easily computed. Thus, apply-
ing (3.8) and (3.9) successively,
p Pm(s/ T)i2m R+.i+n,j+m i+nj
= pmFn(S/a)i. + 1pm - n Ri + 2m R'j (3.10)
This clearly satisfies conditions (a) and (b) as applied to all pairs of
points. The term in brackets may then be interpreted as the second term
in Eq. 3.5. A fuller discussion is given in Appendix A.
This then gives us our set of rules about forward versus backward
behavior. As long as both indices increase, Eq. 3.5 may be used to ex-
tend the sequence, as long as no "leapfrogging" occurs. The sequence may
be extended (in either direction) from the end point only. Going backward
in either index demands an interpolation formula, now to be derived.
Let us start with Sjadcompute Sinjand S.~~ from Eqs.
3.8 and 3.9. Then compute Si4n,j+m by proceeding from either i+n,j
using (3.8) again, or from i,j+m using (3.9). Now from the four corner
values we interpolate for Si+k,j+k (Z < n, k < m) at any interior point
by the following algorithm:
(S/a) a(SO) +(S/)i+,j+k =i ,j+ m
i- +Y(/)-n + (Soi+n,j+m +(G R (3.11)
where are constants to be determined, and R is again a
completely random Gaussian variate of unity variance (i.e., not tied to
any of the random variates used to compute the four corner points).
This is an important point--we never have to "remember" any previously
used random variate, in any step.
43

That the value of (S/a)i+z,j+k correlates properly with itself
and tlhe four corner values is the condition that determines the five
constants. This leads to the following equation:
1 2 2 2 2 2
a + + Y + 62 + C + 2pm(aa + y6)
+ n(,y + 6) +2F Pm(Oy + a6)
+ yFn + Bnpm = 6k
am + +yFnp + Fn +6 FZm-k
(3.12)
a n + Snpm + y + m = Fn-1 pk
anpm ++ B en-9. p-k
whose solution is
= k 2m-2k 2n-2 z )
ai F P(l -P )(1-F V
Fm-k 2k( 2 n -21 k_
F ( - F )(1 - p )/A (3.13)
n9rk 2. 2-ky F -P (1-F )( P (3.136 Fn-Lpm-k(I F F2Z)(I P p2k )i A
2n 2mA (1F )(1 P )
These values are readily seen to lead to the correct correlations as
9,k approach any of the four corners.
44 iz

Four-point interpolation may in some cases collapse to even two-
point interpolation, as when S2,1 is computed from SI, 1 and S2, 2
but Eqs. 3.13 represent the most general possible case. The proof that
this solution correlates correctly with previously computed points Si, j
(i' < i, j' < j) is tedious but straightforward.
We ha'e thus shown that two-dimensional sequences can be generated
from the end points in both directions, and have given the necessary
equations for interpolating, which is tantamount to joining two separate-
ly generated sequences as they near each other. Note that from the form
of Eq. 3.5, it is perfectly appropriate to generate completely independent
sequences in widely separated regions-the first term in (3.5) then
vanishes and only the random Gaussian is used. Only when the sequences
near each other need any correlation be considered.
The previous discussion may readily be generalized to more than two
dimensions, but the algebra becomes tedious even under the simplifying as-
sumptions of exponential decorrelation. Analogy with sequences in one
and two dimensions would lead us to expect the following results. Extra-
polation of a sequence in a single dimension involves only the end point,
whereas interpolation involves the two nearest bounding values. Extra-
polation in two dimensions can involve up to three previously computed
values (see Eq. A.4), whereas interpolation in general demands four other
points. In three dimensions, extrapolation can involve up to seven other
values (to obtain the final corner of a rectangular parallelepiped), and
interpolation demands in general eight other points.
We present below the case of extrapolation in three dimensions to -
find the final value at the last corner of a rectangular parallelepiped.
Thus we label points now with three indices, i,j,k , the last correspond-
ing to the time. Points separated only in time are related by the
equation
45
__2
(S/a).i~ k+r = SCYi . l + R k (3.14)
where 4is the exponential time decorrelation. Equation 3.5 is replaced
by
~S/a) =Fn~m r (S/a).i+n,j4m,k+r i,j,k
+ 1 Fn 2m,,R (3.15)Rijk
In Fig. 22, let the axes be as labeled. Equation 3.15 is appropriate
only when no "leapfrogging" over intermediate values occurs. These inter-
mediate values (the other corners shown in Fig. 22) are computed as
follows. In the plane k =k ,corresponding to a single instant of time,
we have already shown how to compute the values at (i+n,jk), (i,j+m,k),,
and (i+n,j+m,k) ,beginning with the point at (i,j,k). Equation 3.14 ist
then used to compute the point (i,j,k+r).
i+n,j,k i+n,j,k+r
i/~ 'ij~~
i~j~k *j ,kjr kktr
igre n~ 22 Exraoato of GasinSqec nTreDmnin
46/
i~fl~j~ME-

Equation A.4 is then used to give (Sainjkr from the three
other corner values (i,j,k), (i+n,j,k), and (i,j,k+r); and similarly for
the point at (i,j+m,k+r) in terms of the values (i,j,k), (ijkrand
(i,j+m,k). Finally, to fill in the last cornler (i+n,j-Im,k+r), we must
write
(SIO)i~nj.Iik+r A(S/a),,~~ + B(S/O).ij~
+ C(S)ik+ D(S/o)i ~ E(S0)ijk
+ G(S/O) +H(S/G) + cR (.6i+n,j,k+r +i,j~m,k+r ijk (.6
Insuring the proper correlation with all other points leads to the fol-
lowing values for the coefficients in Eq. 3.16:
A -Fnim
B F P '
D--
E ~r(3.17)
G Pm
H F Fn
2 2n 2m 2m 2r 2n 2r 2npm2i- (F P +P + +F + ) FPmZ
2n 2m 2rM+ F + P +4
The formulas for interpolation inside the rectangular box will correspond-
inc-ly involve the solution of eighth-order determinants.
1-W
47

3.3 DIFFERENTIABILITY OF FIRST-ORDER MARKOV PROCESSES
The exponential correlation function assumed in the previous sec-
tion is appropriate to first-order Markov processes,4 and is used
principally for mathematical simplicity in generating random sequences
in three dimensions. Before it can be adopted for use in ROSCOE, we must
find a way of relating it to the expected variations in intensity, while
scanning across the distribution of Gaussian striations used in ROSCOE,
which is done in Sec. 3.4; we must a so examine more closely another
problem connected with differentiability.
in the linear extrapolation of a sequence of values of some quan-
tity u(x) the simplest is the first-order sequence for which u(x + T)
depends on the previous value u(x) , through
u(x + T) = k u(x) + -k 2 R (3.18)
,Ij Iwhere k e < I and R is a random Gaussian variate. This
sequence, represented by an exponential correlation function
)= 02 -vITI
is pathological in being continuous but non-differentiable. Thus, de-
not.ng expectation values by brackets < >
<[u(x + 6) - u(x)]2> = <[u(x + 6)12> + <[u(x)12>
- 2 <u(x + 6) u(x)>
2 -V6= 2o(1- e )
= 2o2 V6 (3.19)
48N I
-I

and, as 6 0 , the left-hand side gives
<du/dy> o42 -1 (3.20)
22 being the variance.
4The reason for this behavior is well known to be the non-existence
of the second derivative B"(0) , caused by the cusp in the correlation
function B(T) at T = 0 . This introduces a high-frequency fuzz or
jaggedness into the function u(x) , manifested by the comparatively
slow high-frequency fall-off of the spectral density S(w)
S() =I2 J e' B(T) de
2 9= v/(v2 + E) (3.21)
In this section we attempt to quantify how seriously this jagged-
ness interferes with the differentiation of u(x) , as described by
Eq. 3.18, taking into account the finite detector width. In Sec. 3.2,
we described a technique for generating a sequence of intensity values
simulating a striated field of view with different correlation lengths
along and across the magnetic field, and also a finite decorrelation
time. We consider here only the one-dimensional case, and let the
linear field of view of the slit (at the striated region) be A , as-
sumed to be some multiple N of the sequence step-size 6 . We shall
examine the character of the (expectation value of the) derivative
u'(x) as a function of both A and N ,where u'(x) is defined as
u'(x) -(+ IM < (u +u 1 .1 u
+ (U_ + u_ +... u) > 1/2 (3.22)-N -N 0
49 °4ii

Letting x e and a - , this expression may be shown to
reduce to
1
u'(x) - N + [4(N - I)x
2(N1+N21)sA
(4N + 2)x2 +4 +x 2x~ 112 03.23)
This is plouzed in Fig. 23, and is seen to be veixy insensitiv to the
number of points N in the interval A , but varies essentially as
for slit widths small compared to the correlation distance v-1 ,
in accord with Eq. 3.20. Thus as the detector field of view is narrowed
down to values small compared to the correlation length, the derivative
(as defined by Eq. 3.22) becomes indeterminate, as e:xpected.
It is not yet obvious, however, that this spikiness need preclde
the i of an exponential correlation function for generating similar
striated fields of view even in this case (narrow field of view). It
must be remembered that the radiance values described by Eq. 3.18 are
also contaminated by the other various sources of noi-e (photon noise,
detector noise, etc.), and if the spectral composition of the noise ismuch widAr in high frequencies than that of the signal, the derivative
is chiefly due to the noise. Thus the high-frequency hash in Eq. 3.21
may itself be considered as a kind of noise, which must be alleviated in
the smoothing process.
The central reason for trying to retain the single-point represen-
tation (Eq. 3.18), with its admitted bad features in differentiability,
concerns the algebraic difficulties of extending and interpolating
sequences of higher order in two and three dimensions. In Sec. 3.2, we
derived the equations for extending, interpolating, and joining different
numerical secuences in several dimensions, when the variance of the com-
puted value was permitted to be any arbitrary function of position, the
-- 50

MI
e-vA 0 . 99 ,
10 a1
0.95
- - - -- m -
;10-
0.5
0.5
ji I
0 20 4 60 8 100N
Figure 23. "Derivative" of First-Order Markov Sequence(of Eq. 3.23)
51

statistics were Gaussian, and the autocorrelation function was exponen-
tial. Even in this simplest case of a singie-point sequence, extrapola-
tion in three dimensions demanded use of seven previously computed
values (to obtain the final corner value of a rectangular parallelepiped),
and interpolation between previou:ly computed values demands the solution
of eight algebraic equations, in order to maintain proper three-dimen-
sional correlation. If one were to use a more complicated recursion
formula than Eq. 3.18, involving more than the last previously computed
value, the difficulties of extrapolation and interpolation would clearly
be increased, but it is not yet clear how severely.
Let us consider, for example, an autocorrelation function Gaussian
in shape, since it is the cusp at the origin of e- Ixl that introduces
the high-frequency hash that leads to problems in differentiation. Since
a Gaussian correlation function falls off much more rapidly than the
exponential, one might tnink that in this case u(x + T) for large T
would be much less dependent on the "past" of the process than for the
exponential, which already corresponds to a single-point recursion rela-4
tion (Eq. 3.18). However, the situation is just the opposite: for the
exponential correlation, knowledge of previous values of u(x - nT)
provides little information about u(x + nT) , whereas for a Caussian
autocorrelation function, the value of the process in the arbitrary dis-
tant future can be approximated arbitrarily closely by a linear combina-
tion of past values.
With a Gaussian correlation function
B(T) a2 (3.24)
[corresponding to a spectral density2 2
S) (a/ e (3.25)
-52

We may make a power series expansion of e , retaining only the
first (n + 1) terms, so that the real random stationary process u(x)
is replaced by a Markov process u (x) , and Eq. 3.25 becomesn
S(u ; ) = (3.26)2i n B2n n
The right-hand side of Eq. 3.26 is the spectral density of a delta-
correlated process (white noise), and the quantities u ,U ... u(n-)n n n
(i.e., the process u and its first n-l derivatives) form then
components of an n-dimensional Markov process.
The first-order approximation, with n 1 , gives
2S(u ;W) (3.27)
1+ W2/ 2 )
which has a correlation function
B(T) a eIT (3.28)
which is our familiar exponential. The next and closer approximation
has a correlation function
B2( M 2 a/(1- / )e
[cos(b ) + a sin(bIt I)] (3.29)
where
a =B ( + r2 )/2
b 24*- 1)/2 (3.30)
a/b 1 + NY
53
A

The two-tferm correlation function is seen to be regular at the origin,
and indeed the quantity u2(x) may be shown to satisfy the differential.
equation
uv 1 2+ ut2+ u 2 R (3.31)2 22
where R is a delta-correlated function, in this Gaussian case reducing
to white noise. Whether this process will actually be conveniently
extendable to two and three dimensions has not been examined.
3.4 AUTOCORRELATION FUNCTION FOR GAUSSIAN STRIATIONS
We now must examine how to approximate the autocorrelation function
appropriate to the particular (Chesnut) distribution of Gaussian stria-
tions used in ROSCOE, by an exponential. Consider a random array of
Gaussian rods, with average axial density Z(km- 2) , and with the nor-
malized size distribution used in ROSCOE
8 6 2 2P~)8 /a6 e-co/a
P(a) 3 (a0a) e (3.32)
0
packed in a slab of thickness L(km) . Let the electron density in
each rod be
r 2/a 2
n(r) n e (3.33)
so that the light emission (cm3) is, assuming for the moment that the
rods do not overlap)
2 2~2-2r2/a2
l(r) c n e (3.34)0
54

- 7 -gR
dXLOS
dy --- x-
p
Consider the integrated intensity along a line of sight (LOS) at P , due
to all the striations in a strip dx wide at a lateral distance X from
P . The probability that a striation of size a is in dxdy is
P(a) Idxdy . The integrated intensity due to the striation of radius a
is
I(a,x) = c n2 ]d e-(2/a2 )(x2 + y
2 22 -2x2/a 2
= c a q;/ no e (3.35)
This same expression is true for all striations, of size a in the
strip, of which there are Ldx The autocorrelation function due
to all striations of size a is thus
d 2 -(2/a 2 x + ( x + T) 2B(T) = JdaP(a) dx L c n a Tr e )
-co
c n 2-d4no 3/2 3 /a
- aP(a) IT La e
24 L 3 2) (3.36)
[ + t22
0
55+

Let us now consider the case for which the detector is so close to
the striated region that the angular size of the striations differs along
the line of sight.
to
0r)
xL
X8
a i
DETECTOR
Considering again only striations of a given size a in the area
dxdy , the change in "impact parameter" X due to an angular rotation
a of the line of sight is
= X + (L° + Y)
As before (Eq. 3.35),
2 2
l(a,X) cn2 a -72 e(2X /a
2 2 2 22 -(2/a )(X + 2aX(L +y) + a (L +y)
2)l(a,X') cn a e 0
56

so that
I(a,X) I(a,X') (c n a)/2
-(1/a 2)(4X2 + 4caX(L +y) + ct 2(L+y)2 ) (3.37)
Integrating over all spatial positions for the striation axis, and
over the size spectrum a , gives for the autocorrelation function:
Lo CO
B(a) = f daP(a) f dy f dx i(a,X) I(a,X') (3.38)
24 40 0 - .00 _ cI~
c n 4T (c 4 (Lo+L)) - i Lo ,
L .ian 0r 3cc aCo
which may easily be seen by L'Hopital's rule to reduce to (3.36) as
L - , since caL in Eq. 3.39 corresponds exactly to T in Eq. 3.36.o 0Thus we have now formalized the procedure for integrating along a line
of sight that penetrates striated regions at various distances from the
detector. Thus, using a subscript i to refer to the various striated
layers, we havel4 2B-(a) (7 0 ( )/3a
0
g 4 ta- 1 (L i-Li ) (aL4tn 01 130
n "tn- )- tan- ) (3.40)0. a 0a0
One of the objections to Approach 2, the simple superimposition
of bright structured regions (as at different distances) was that it
apparently locked into the code a technique applicable to detectors at
DSP distances, but not for sensors much closer to the striated regions
where nearby striations subtend a much larger angle than distant ones.
g57
Equation 3.40 removes this objection, and in Fig. 24 we have A
plotted Eq. 3.40 in normalized form for a single 1000-km thick cloud
at various distances L from the detector, ranging from 100 km to0
essentially infinity, together with the single exponential. Note the
similarity of all the curves; this agreement is then a measure of how
well the exponential approximation of Sec. 3.2 can approximate the "true"
autocorreiation function.
If the areal density [ of the rod axes becomes great enough
that appreciable overlap occurs, correlations between different rods
must be considered, since the intensity of light emissions is propor-
tional to the square of the total electron density, and thus is not the
same as the sum of the squares of the electron densities appropriate 1-C
to the various rods. In this case, the factor l/(1 + R2 ) in Eq. 3.36
(R Ti o) is replaced by the expression
2 4.35F 1+ .IF 5.03F1/1+ R + ++
2 2 2.5 2(1 + 2R2/3) (1 + R2/2) (1 + R2/2)
(1 + 4F/3) 2
where F = a . o is the axial. packing density. For F 1 , this
expression is in general a factor of two or three higher than the simple
1/(1 + R2) We are indebted to Dr. Peter Redmond for carrying out the
algebra for this relation.
A
58
m ,, - -= -om • n m nu u n ... ...

809 6P-Ai
4
ItI
0 00 U
(0
+3 0
00
.0
4
.14
4J
CD LO C> t
+ 0
COI-'
059

REFERENCES
1. The ROSCOE Manual, Volumes 1 through 20, General Research Cor-
poration (unpublished).
2. Nuclear Induced Optical Phenomenology Program, General Electric/
TEMPO (unpublished).
3. Paul Fisher, private communication.
4. A. M. Yaglom, Stationary Random Functions, Dover Publications,
1962.
5. N. Wiener, Extrapolation, Interpolation, and Smoothing of
Stationary Time Serk-, Wiley and Sons, 1950.
60
LI• mm • • imm iml • • mmm~ m m • m • • w mmmmmm (I

APPENDIX A
EXTRAPOLATION AND INTERPOLATION OF RANDOM SEQUENCE
We have omitted several steps in the chain of proofs necessary to
justify some of the statements in Sec. 3.2, which we address more fully
below.
First, we must show the independence of extrapolation in two
dimensions. Having computed
(S/c)i = F (S/c). . + i - Fn R. (A.1)i+n,j i1
can we project ahead in the orthogonal j direction from Si,j
without taking account of S ? The answer is in the affirmative,i+n, j"
since if we try a solution for S. of the forml'j+m
(S/)ij+ m = (S/o)i, j + B(S/a)i+n, j + yR. (A.2)
it is easy to show, using Eqs. 3.2 and 3.3 of Sec. 3.2, that
8=0(A.3)
so that the point at i+n,j does not influence that at i,j+m
Second, we must modify Eq. 3.4 of Sec. 3.2 when any "leap-
frogging" occurs, as in computing the point at i+n,j+m when we
have already computed the other corners of the rectangle, at i+n,j
and i,j+m , from Eqs. A.1 and A.2. In this case we can easily show
that
61

n m(S/aY) =-F P (S/G). + P (S/a)
i+n,j+m ij i+n,j
+ n(S/o)i~.m + 6R.. (A.4)i'j+M 13
where R.. is a random Gaussian variate of unity variance, and13
i-62 - F2 n + 2m F2np2m (A.5)
Note the negative sign of the first term on the right, which is at
first sight surprising, since an exponential decorrelation demands
a positive expectation value for the product of any two terms.
The answer, of course, lies in the positive correlation of all
the terms on the right with each other, which must be considered when
one takes the expectation value
<(S/a) (S/a). .>i+n,j+m 1,3
The proof that (S/a)i+n,j+m , as computed in this manner, cor-
relates properly with previously computed values at i-n",j-m" is
straightforward.
The interpolation formula (3.10) has some interesting features
that are worthy of note. If the interpolated point lies on an edge,
its value depends only on the values at the two corners l and 2
bounding this edge, and not at all on the opposite corners 3 and 4.
But if only three corners, say 1, 3, and 4, have been computed (and
not the corner S2) , in order to compute the same point P on the
edge 1-2, all three values at points 1, 3, and 4 must be used in a
linear combination, as in Eq. A.4.
62

%a
Successive interpolation f or points in a rectangle is straight-
forward, but cannot be done blindly. Having once computed a point P
inside a rectangle, an auxiliary constraint has been set for a sub-
sequent point P' since these must correlate properly with each other.
Thus Eq. 3.10 cannot simply be reapplied for P' Instead the two
points A and B must be found (A from a linear combination of 2, 3, and
P , and B from a linear combination of 2, A, and P , as in Eq. A.4),
and then the interpolation (Eq. 3.10) reapplied. At each step it must
be shown that any computed point correlates properly with other values
than those used in its determination. See Fig. A.I.
The final step, of joining two widely separated regions computed
wholly independently, is now seen to be straightforward, by a process
of computing successive corner points of the rectangle between the two
regions. Thus if region I has a limiting point P in its upper right-
hand corner, and region II a limiting point R in the lower left-hand
corner, the other two corners M (a linear combination of P and R)
and N (a linear combination of P, M, and R) are then computed and
intermediate values interpolated as previously discussed. See Fig. A.2.
OPs
Bp
Figure A.l. Multiple Interpolation Inside a Rectangle
63
-'--- -- --

II"II
M_ _
I I
P
I-
Figure A.2. Joining Separate Regions
64L

APPENDIX B
FLOW DIAGRAMS
65 IA

ENTER
0ACCESS OL, 0D. OP INITIALIZEOT. ST, BR, FV WELN1
DATASTS 1RADIATION
CALL UPWELL 1
KFLAOL ~hERISE ____________ *UPDATE OBJECT &(NEVENTS) - SENSOR POSITIONS CRAENXI IOPTICS LOOKCALL PLTFRM I !EVENTATT=T+
INTALj CALL WHERJ FRAME TIME
0 PUT AT TOP OFTHERWISEEVENT LIST-
KTYPE OD (NOD)OTEIS KVC 0?AND TRUE
KTYPE 00 (NOD) 1. CREATE opTirsTRAC tTRCK PROPAGATION EVENT
TRCK ~ sPUT ATTC POF
FALSE EVENT IST< IACO BR)NBIR) YS ABAF FV (NFV) 4
(LOOKIN a POINT SENSCR AT *CRAESMLTDOWN) OBJECT STATE CRAESMLT
NO LVINEC STATE-SENSRi OPTICS EVENTIf ft PUT AT TOP OF
OP ON OBJECT VET ISOAKhAO AJECTORY POS I* CJ EATE LIST OF 2(NEVENTfS) FOR POSSIBLE ~ 'ATH DATASETS *CET PIA
I M E A C U S T T 0 I A R G F T S I N F O V I-- -C O P T I N=0 TIETFOR ALL BANDS (ILIST)COPTIN
* TIE =COCK FRAE *STORE ANGULAR-POS g EVENTS SPECIFIEDI*~~ (TRAC HOMIN FAM G.IN SENSR COORO DTRC IlLOOP ON EVENT LIST. YES OBJEC
TIME= TIME EA ALT=OYE
NO DO YOU WAN' N SIMULATE Ni *CREATE NEXT LOO'K SPECIAL OPTIC OPTICS
EVENT AT OUTPUT ?TIME=TIME+ I OBJECT NO /T-T.FRAME TI ME IN FOV [FRAME
C IT YES 2 ______
0 CREATE REAL LOOK] 9 CKATE 'SPECIALEVENT AT ACO jOUTPUT EVENT
TIME, T 0 PUT ON TOP OF0 KFLAG CL (NEV) IEVENT LIST
=4HLOOK
NOTES: I FOR ALL NEW PATH DATASETS. WE SET T.IME=CLOCKTNEX =- 5W -
2 CURRENTLY THERE ARE NO SPECIAL OUTPUT. HOMING, OR DISCRIMINATIONEVENTS, THE CODE HAS BEEN STRUCTUTRED FOR ThEIR INCLUSION LA TER
PROGRAM OLOOK: Optics Look Event
66

I • "
CHECK THE STATUS OF EACHPATH DATASET (NSL)ON ILIST
ACCESS OD. ST. FV, '
BR, PR <iDATASETS E
" ACCESS SENSOR DATA, jLOOK TIME
YES OPTRP =3HYES&
TNEX) 0
YES KFLAG PR(NEVENTS) NO
>0?2TIME =TNEXTN.X = CLOCK
NO KNEW=1
THIS BLOCK OF THE PROGRAMSETS UP THE LIST OF PATHSTO BE INTEGRATED PUT PATH ON
(SLIST)
UPDATEPHENOMENOLOGYREGION DATA NO NEXT
CALL INTRP E PATH
YES
SHOULD WE NO CAN WE INTERPOLATETREAT EXTENDED INTERPOLATE: YESPATHODATA USING (12 &
O I1 DATASETS)CALL INTRPOOYES
* CREATE LIST OF NOPATHS TO OBJECTS GFOR ALL BANDS & DGET NEXTPUT ON ILIST UPDATE TIMEA
CALL XOBJI CALL MRCUPD wCALL XCLD 3
3
0 CREATE A SECONDPATH DATASET (MSL) 3GRID THE NO & TRANSFER TIME 2 NEXTDATA (12) TO PATH
FOV TIME1 SLOT (11)
YES0 PUT NEW PATH
0 CREATE OR ACCESS YES DATASET(MSL)LIST OF PATHS FOR 0? ON INTEGRATIONGRID POINTS AT ALL LIST (SLIST)BANDS NO
* PUT ON iLIST0CREATE ANEW
TIME2 DATASET(12) & PUT ON (MSL)
PROGRAM OPROP: Optics propagation event. Sets up paths to be integratedand/or interpolates these data
67R
%-; 67

0DETERMINE IFTHERE ARE ANY
4 PATHS TO BEjINTEGRATED
YES SLIST =D
NO
CLUSTERS CLOSELY SPACED PATHS
FOR EACHPATH ON SLIST
PATH SL(NSL)0 FOR EACH PATHDATASET (NSL)
-A ON SLIST*CREATE THE SIGHT
PATH CALCULATIONTNEX=LC EVENT (NPT)OR AT TIME= CLOCKKTYPE= 5HTARGET ES EXT
OR ~~PATH O AHPTNO FOR EACH PATH
DATASET (MSL) ON S LIST
YES NEXTTNEX CLOCK PTH SL(NSL) PTOR >0.KTYPE *4HGRID NOR YES NEXTOPATH#O NXXLAM SL(NSL.)* PT PUT THIS PATHXLAM SL(MSL) DATASET (NSL)OR ON THE LIST OFNSL=MSL PATHS TO BE
INTEGRATEDNO ORDERED ITME
0COMPUTE DISTANCE CAPTTOR NS T4BETWEEN PATHS EfPI S,4IN SENSOR COORD.(DISTNM)
* CREATE THE RETURNPROPAGATION EVENT
DISTNM; YES (NPR) AT TIMEBLUR ST(NST) CLOCK
NC0 PUT NPR ATI
PATH SL(MSL) = POINTER TOP OF EVENTITO NSL LISTPATH SL(NSL)=1 PUT NPT AT=EI
TOP OF EVENTLIST
PROGRAM OPROP (continued)
68
Zi

FOR EACH PATH DATASET (NSL)ON SLIST
THIS BLOCK OF THE PROGRAM TAKES THE .FLA =NEWLY INTEGRATED PATH DATA PUTS 1* TRANSFER (TEM) TOIT IN THE PROPER DATASETS IF CLUSTERING YES : C= 11 AAEWAS USED AND THEN INTERPOLATES 1ILC1(i AAETHE PATH DATA TO THE CURRENT TIMECALXI NB1,
_4NO TEM, O(NI I,)FOR EACH PATHDATASET (MSL)ON SLIST TIES(S)YES I0 PUT (NSL) ON
ILIST1 0 .4TFEi9OLATE (11)
YES NEXT NO DATA TO CURRENTPAH:Lo.L PATH e ACCESS (12) DATA CAINMRP
PAHS(S))& TRANSFERI IMELLNTPN O. TEMPORAP.'f VECTOR
0 GE DATSET ROM(TEMI0 GE DATSET ROMCALL XMIT (NMBR 12.
WHICH DATA IS Q (N 12). TEM)
CALL INDWRD I- - - -(PATH SL(MSL), NSLAGJSL IFLA= T
REMOVE INSL FROSLIST & ILIST NX
TRANSFER DATA I it DSTROY (N12) &FROM (12) OF 1 NSL
(NSL) TO (12) .___________OF (MSL) _________________________
CALL XMIT (NMBR 12, 1O(N 12). Q(M12)) ICLEAN-UP PROCEDURE
IFOR EACH PATH DATASET
£2 j____________________________(NSL) ON ILIST
OPTAP =3HYES YS IFLAG= 0 TE S(NL YES (NEXT
>CLOCK PATHFOR EACH PATH (NSL)
NO ON SLISTNO1 0 REMOVE (NSL)I
* ACCESS (II) & (12)DATASETS WHICH i FO LSCONTAIN PATH LOTONLDATA AT THETWO TIMES 44
0 TRANSFER DATA_I ROM (12) TO (11) 1 N EXT ______________
CALL XMIT (NMBR 11, P PTHO(N12). O(NI1)l
PROGRAM OPROP (continued)
69

THIS PART OF THE PROGRAM CREATESTHE IFP DATA (NFA). PATH DATAARE CARRIED IN THREE LISTS: PATHSTO TARGETS (PLST FA (NFA), PATHSTO OBJECTS (PLSO FA (NFA)), AND
PATHS TO GRID POINTS (PLSG FA (NFA)).
0 WIPE OUT PREVIOUSLIST OF (FA)DATASETS
CALL WIPOUT (ILISTOD(NOD),l)
FOR EACIFSENSOR BAND (NBN'
10 CREATE AN (FA)IDATASETI@PUT AT BOTTOM OF
ILIST OD(NOD) FOR EACH PATHDATASET (NSL)ON ILIST
PATH FOR NO NET PUT ILIST ONBAD(BN AHTHE NEXT PROPAGATION
EVENT DATASET
IF (KTYPE 6HTARGET)FANAN)
IF (KTYPE =6HOBJECT)CALL PUTBOT PLSO FA(NFA), Nil)
IF (KTYPE =4HGRID)CALL PUTBOT (PLSG FA(NFA), Nil)
PROGRAM OPROP (continuedI)
70

NOTES
1. For all new path datasets, we set:
TIME = CLOCK
TNEX = -5000.
2. This part is computed only when path data is to be initialized.
3. The second path dataset contains the same data as the first for
normal updates. For initialization, however, a new 021 dataset
is required since integrations at two times are required.
4. The (Ii) dataset always carries the path data at the current
time used in the optics simulation.4
5. This part is computed only when path data is initialized. It
sets up the (Ii) data for interpolation.
6. The path datasets on SLIST are ordered such that initialization
data at two times for the same path are sequential. A single
path dataset (NSL) with pointers to the datasets carrying the
time-varying parameters at two times (Il and 12) is then formed.
PROGRAM OPROP (concluded)
71

* ACCESS SENSOR (00)DATASET
e GET SENSOR
POSITION _
CALL LTFRMFOR ALL FIREBALL
* ACCSS CURENTDATASETS (NFB) ON FBLIS
PATH LIST ILISTe GET FB POINTER
DSPF8
FOR EACH PATH DATASET(NSL) ON LT
*ACCESS OBJECTPOINTER:OBJT SL(NSL)
OBJT SLINSL) YES N EXT)=DSPFB 'NFB]
NO
0 PUT NEW PATH
LAST PATH DATASETS ON NEXT
DATASET ON No NEXT 1 ~ ~ FLIST: S
?S~ CREATE PATHDATASETS TO
YES BETATUBE
CALL PATHS
THIS FIREBALL HAS NOT BEEN j(KTYPE =7HINITIALI fTREATED IN PREVIOUS CALLS TOXOBJYE
CREAE PTH SXT NO IS THERE A I. PUT NEW PATHCRATET TOATHI IN FB) N BETATUBE: DATASETS ON
FIREBALL 0SB DNO)~~
CALL PATHS(KTYPE=7HINITIAL)YE
__ARE__WE___0 CREAE PATH
0 P T EWPA H NLY TREATNG IS THERE. YES I DATASETS TO THE 1
DATASETS, ON FIREBALLS: NO DUST REGION: Ij DUST REGIONluT TYPE =9HFIREBALL t SPOS FB(NFB) CALL PATHS
*0.(KTYPE=7MINITIA)
C EXIT
SUBROUTINE XOBJ: Generates sight path datasets to all fireballs, dustregions, and beta tubes in FOV
72

: ACCESS SENSORDATA'. DID. ST. FVBR DATASETS
"PATHLS= 0
S 10 SET REGION PARAMETERS:
I. ST REIONAARAMTER REGION KIND =4-KIND 5 1 DATA USING POS = STATE(2) BOY5E
SE POINTEN TOAMTES OBECT HMIN = XMAG(POS)- - [ ~~~~FOR THIS CALL IH~A MN, E
P05 = BPB85 BE(I-BE) RMAX= /i2*LTAR'5E5
HMIN=30.E5 HC = H.MAX +HMIN)12VEc = STATE(5j _ _ _ _
HMAX =120,;.5 BE-TATUBE IGOHC= jPOSJ - RBODY
DSTYP OL~r e SET REGION PARAMETERS:
RMAX =1,65 IFR752 + EI KIND=4RMIN = 1.65 RSON 2 + R60EZ FIREBALL S=PSDPDP 1VEC = ANTIPARALLEL TO --I ETREGION PARAMETERS- HMIN = HMIN DP(NOPr)MAGNETIC FIELD IND HMAX =HMAX DP(tlDP)DIRECTION 3I P&S= FBPOS; FB(NFB) RMAX = RC DPINDP)
HMIN=HMINF FB(NFB) HC = IP1S - RBODYHMAX=HMAXF FNB)Vi7C=UNITY(POS)
I RMAX = RVT VB(NFB)
IHC = tPOS - PBODY
Vic= FSVEL FB(NFB)
I* TRANSFER REGION I OVRCETRPSTION TO 6HUDT TYPE OF 7HINITIAL 0 CONV R OT
IP(1z3)* CALL- -SENSOR____C
I --KTYPE CALL OTRANP(1.13)=POS
I CHECK SIZE OF le CREATE A PATHREGION VERSL'S DATASET (NSL) FORISENSOR RESOLUTION EACH SENSOR BAND j
NMAXX = IFIXIZ. + RMAXI * P'UT (NSL) ON PATH
RESOL) -1 LIST PATHLS
NMAXY IFIX(HMAX - HMIN) 1
NMAXX~2 NO KYPE= YES
OR 6UDTNMAXY)26UPAEQE Ij
< YES NO
0 IF PATH IS WITHINtFOV:z
SUBROUTINE PATHS: Routine which determines number and position of pathsto a specified region
73
A

CREATE ADDIT!ONAL PATH DATASETSTO REGION
_Eo SET UP VECTORS FROM SENSOR TO
REGION & NORMAL TO THIS VECTOR ®ION AXIS (VEC).
v =Xx.VEC
* SET UP VECTORBETATUJBE__ REGION DUST OR PLUME 1 SEUPVCONORMAL TO Y VEC: I yPE OMLT &E
Z=YXVEC? Z=YxVEC
FIREB'ALL
F * ET CALNG FCTOS: SET UP VECTOR NORMAL o SET SCALING FACTORS:DISTI =HMAX - HC - RESOL2. aOS:j DS=HA .HI EO~2DIST2=HC-HMIN-RE=SRMAX.- Ri - - -
RC = RMAX (HC -601E5)+ ___________
[ RMIN (5.E5- HC)y25.E5 __________
- ~ I0 SET SCALING FACTORS: e CMPUTE POSITIONS OF CORNER
F* COMPUTE POSITIONS OF CORNER ALP =SEPA(Z.VEC) f INT OF REIOjII X =POS +DIST'VEC
tOINTS OF REGION: AA = FMAXI- -
X=POS-iDISTI*VEC JBB=HMAX-HCP(1 1)=X-RMAX*Z jTANALP=TAN(ALP) X O-IT
~POS -IST2VVEC 1IS=+AB/TANAP2 ~ 3 xRMNzI -RSOL). 1P(1.3)=POS+RMAX*YP(1.4)=POS-RC*Y jIRMAX=RMAX-RESOLU2. I~~NP-5
COMPUTE POSlTIONb OF FOUR
POINTS ON REGION PROJECTIONON PLANE NORMAL TO X:
I Pj12)=POS-DIST~Z
IPCI.3) = P6S+R MAXYP(.4)= P'-R-MtAX*YI
I NP=5
F CREATE ADDITIONAL POINTS ONREGION PROJECTION INTERM6EDIATE 1TO THOSE ABOVE AND:NP= 7 IF NMAXXM4
ORINMAXY;04
NP-I30: NMAXXZ04- AND
_NMAXYJ
0 INSURE THAT AT
YES KTPE= NO LEAST ONE PAI- 1YESIL~. KTUPF No LIES IN FOV=EI? 1*eIF NOT. DSTROY
EA LAHS
SUBROUTINE PATHS (continued)
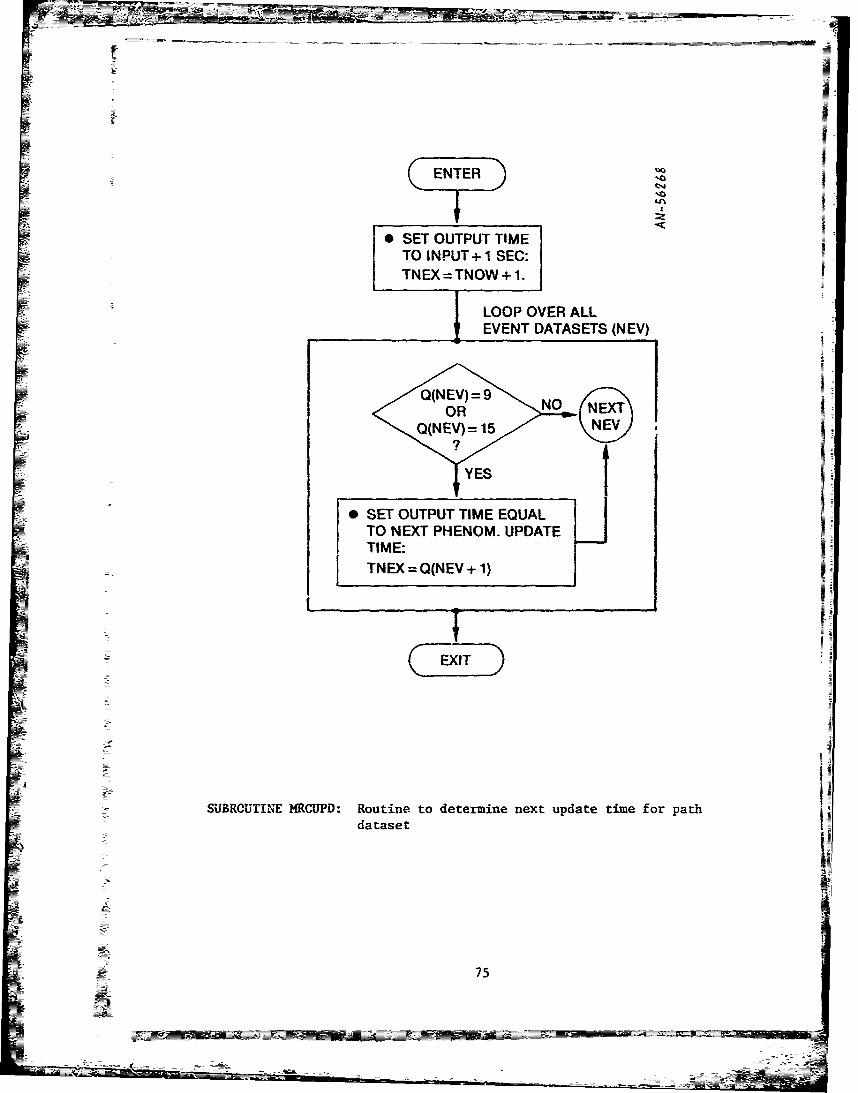
ENTER
0 SET OUTPUT TIMETO INPUT+ 1 SEC:TNEX TNOW + 1.
LOOP OVER ALLEVENT DATASETS (NEV)
Q(NEVNEV
I TEXQ(NEV+ 15
17~<4YES
1N
7ES
SSE OUTPUT TIEEQA

CENTER
*ACCESS THE PATHI DATASET (NSL) &
THE TWO TIMEDEP DATASETS,(Nil & N12)
* SET INTERNALCALC. TIMES:Ti = TIME SL(NSLjT2 = TNEX SL(NSL) I
* SET PATH DATA TIMEjTO CALL TIME:TIME SL(NSL) TNOWJ
S PRFRMTM INTERPOLATION2TOTOBRN N)DTA OR (NNl):
USN LEFR IE INTERPOLATION TO
FORMULA:TRPffTIT2, X1.X2)
=X2 -(X2 -Xl)(T2 -TNO.~VtT2 -Tl) I
* INTERPOLATE FOR POINT
KTTYiEIHl (Nil) &HOOT I I(?II)
*HERE THERE IS SPACEEXIT FOR TUMBLING TARGET
CALCULATIONS
SUBROUTINE INTRPO: Routine which is used to interpolate path data to
c urrent time
76_I

ENTER
CELL BY-CELL - NOTES I PATHS ARE ORD~ERED AS FOLLOWSEVENT -INTEGRATIONJCL ON LIST
TYPE ON T1 72
PAIH2 -... .
* Ii A AIIITGRATIO IN EIiSCAT IS DONE FORPROPERTIES jALL SANDS, SO WE SAVE XLAUI ToCALL SNELLS ITELL WHIEN TO INTEGRATE AND WREN
-0 SET KCALC I TO JUST PUT DATA AW.AYXLAM I I7 BAND
0 INITIALIZE CLOUDCOMMONS IF ARPNOPCALL CLOGEOMCALL CLOUDII
FOR EACH PATH INSLI L.------ON A LITSSLS'j
ACSTI& T2- -1 WPEOUT OF=T FOR EACH -ELiXDATASETS LIST ON PATH INS..)
~ ' CALL IRCUT r - --T--
>-~ I AT SAVO - IC~G~~ ~ EITHER r- CEATHE aFFCTS. .7 LAMASL4NELW_____ NET -CEK 1 EIISCAT AND
TIAI ~ O *CRAT - CE & RETURN SPALCXLA7 7 IZNTEGRIEI .HCELL Dt;t~K EVENTS CD THIS
0S O THE ICE~ CELLGET NEXT tO8GrES tPUI DAIA LIEW FAT I LOOPOER -t -T- IDATASET) MN.AY) CALL SPGEOt BAND INT tell APGET)
GMI2N1= eKTOT BNBI IRETURNSIGM I2I~) SGMA G4T~G' I IRRADIANCE CU)
GORY IZN1I2LA =RCOREBO(G MMS< CAIIj LL 91URAD IIICORT t2,'NI2~TMORE - ~ 1
SEED IZINI2ISEED 11mill y 0N DDpA
4 I $WTEGRTE j PATH TOTAL
GE ~ BKND SWUMA.ND SAVEj J_____
I I SULIOVER GAND xI KTOT =BKTO -
BKGD BihNBI-
I I10ZOA
I L UP TOTARGETIII SKTOT BGNBGI . KTOT
PROGRAM SPCALC: Sight path calculation event. Initializes sight pathcell list and then creates EFFECTS and EMISCAT eventsto process data cell by cell
*77

ISIETER
0 INITIAIZEPARAMETERSKPRNT =0FACT= 10.NDR=50
XDELTA = 100tNLIST=0
ro COMPUTE COSINE OFZENITH:- -
.SEPA(RDVEC SPHATITI -. IF(.a>TIr21
CSZEN = COS I.)
* CREATE THEBASIC INTEGRATIONLIST-ICALL ISPLST
0 PRINT THE CELL'LIST & THE OSA
KPN=O -" LINK WORDS.
CALL LISPRTCALL LUMP-
YES
0COMAPUTE THEATMOSPHERIC SHELLS.
INTERSECTED:CALL STEP
VOR ALL ATMSHELLSINTERSECTED'* ADD THE ATMOSP
SHELLS TO THECELL LIST*CALL INSERT
;0 PPINT THE CELLIKPRNT0 NO LIST & THE OSAIKPRNTLINK WORDS
CALL LISPATCALL LDUMP
YES
SADD THE DISTURBEDREGION CELLS.
t CALL DRCELLS
IS RIT &THE CELL
KPRNIO NO LINK WORDS.
CALLLISPRI' i
YES
SUBROUTINE SPGEOM: This subroutine creates the cell integration list
78

0 CHECK LOOK DIRECTION ANDSET UP VECTORS FORINTERSECTION CALCULATIONSSEN4SVC= RDVEC
KFLAG =0 & I=0-. SENSOR LOOKING DOWN:
KFLAG= 1a =ACOS(CSZEN)
SEPA(RDVEC, NO HBAR = RDVECP*SINa HBAR4SPHAT)SBAR = IRBODy 2 -HBART RBOOY
<TI/2H BAR>SCALE= IRDVECI-CSZEN I RBODY
+YES SENSVC = ROVEC + SCALE-SPHAT
0 SENSOR LOOKINg ',Il- OBVEC =RDVEC - SENSV^C(CONTINUE)
FO AL CHECK FOR NUC. REGION INTERSECT;ONSAFBS ON FBLIS
SCOMPUTE EXTENT (PL) OF INTERSECTION
FIREBALL 4HIHOF PATH WITH THESE REGIONS:
TYPE? L CALL EXTENT FOR FIREBALL REGION,I HA-CHEM PANCAKE.
3HLOW I ~CHEX-ION LEAK,0COMPUTE EXTENT (PLQ OF INTERSECTION DEBRIS LOSS-CONE
OPATH WITH THESE REGIONS: FOR EACH DEBRIS(ND4EXTX-. FR FIEBAL REGON 0 COMPUTE EXTENT (PL)OF INTERSECTION
CAL SHEN--R WAKEXDSALLETEN--FO~~XUSTOF PATH WITH THESE REGIONS:
____________ SHEATH, BETATUBE
CHEIUM~-- OR ILSN COUDCALL EXTENT -- FOR DEBRIS (CONTAINED),
L=?NO 0oSET F-6RAMETERS:
INDXW(I, = INDXF FB(NFB)YES KIND(I)= 10 +KINDF -(FB) 16 - CHXII.L.)
f21 -(VORTEX) 24 -(DEBRSNEXT 26 -(WAKE) 20-(SHEATH)
REGION 17 - (CHM SPHR) 19-(BETATUBE)4;~23 -(DUST) ~27 -(DEBRS L.C.) f22- (WILSON CLD) 18-(CHM PNCK)
-PUT DISTURBED REGION CELL ON LIST --CALL INSERT_
SUBROUTINE brlo.ELLS: Subroutine which creates disturbed region cells for
79

-~ -- --- -~-- -
CEKFRCLOUDSTTSIA0GE INTERSECTIONSOFLSWT
CLO12 KM ALTTUDE
0 SES) AAMTRLOOP OVER DEOTERIITC =-
C CLOT DITUBE REGINOLOU STATISTICAL ~ f
OFP INTERSECTIOIOSNF LS IT
LOO OVRE , S SET UP PARAMETERS
S0 PU T DISTURBED REGION ON SLIS CALLL INSERT
CHINERECKORLM NESCIN
SETBUPEPRARETURN
LOOP OVE N (TER
* COKFO L M UTE EX E T P)OFIERSECTION
PLUMEBALL EXTENT '1OPOTER YES O (THWTHPUME
? 0 SET PARAMETERS:
CA I= SF-.50
N E X T T A R G E T I - _ _ _ _ _ _ _ _ _ _ _
SUBROUTINE DROCELLS (continued)
80 i

FS ACCESS SENSORDATA SS CD.ST.BR.FV DATASETS
:0ACCESS FOCAL PLANEIDATASET LIST ;LIT
rF jj -ST PETFOV SIZLS FORSTORED SC.%SORMODELS
0 COMPUTE N9R& NCOF ARRAY E.FOR EACH FO1;AL PLANE ARRAY -( e
DATASET;14FA) ON ILIST
& SC(IOOAO)'FOR EACH PATH DATASET (Nil) ARRAYS PE OYP GERA E LOA
ON PLT FAIFA)FFOR ECH PAT DATASET (Nil)ONEL ON PLSTFAFA
VALPUE T AHINFCLPAE ARRAY
VALUE CTYPE- OTYPE= CALL ARRAYACKK.LL= HII(NIlI 3HF0V SHFIAEBALLS
() FOR EACH PATH (NIl) OR_____________ON PLSO FAINFA) 7HOBJECTS 0 PERFORM SENSOR
* PERFORM SENSOR] jPROCESSINGPROCESSING 6 ' SET UPSPIRE &
* SET UP SPIRE & K= RETURN OPSIM KRETURN OPSIM EVENTS I EVENTS AT TIME CLOCIAT TIME =CLOCK i ~~
I* PUT (Nil)O rNXPATH LIST S ET
NO NUMBE
~~~~~~1~~~~~~ (NEXT THSOBETON~
YETS FO NX
OTHSOBJECT NA
j*PERFORM SENSORNIEXT..4 1 N EXT J PROCESSING\NFAI. Nil 0SET UP SPIRE & RETURN
'-' IOPSIM EVENTS
PROGRAM OPSIM: Optics simulation event. Geiierates focal plane array andcalls processin60 routines
81 1
- - - - - -- la

A'0
0 GENERATEREPRESENTATION OFBACKGROUND USINGPLSG FA(NFA) LIST
FOR EACH PATH DATASET (Nil) CALL ARRAY FOR EACH PATH DATASET (Nil)ON PLSO FA(NFA) ON PLST FA(NFA)
0 K=O* ADD TARGET POINT1* PTSLS =0 INTENSITY TO
FOCAL PLANE ARRAY
CALL ARRAY
" PUT (Nil)IONPATH LIST PTSLS
DO YOU WANTTO PLOT ARRAY? NON.EXTNO K= NUMBER PLOT=7HOBJECTS NFA
PATHS OR < 0OR 3HYES!Ni THIS OBJECT
YEYES
* PRODUCE A CONTOURIII• GENERATE PLOT OF THE
REPRESENTATION OF FINAL ARRAY
THIS OBJECT IN CALL PLOTO@i ARRAY USING PTSLS
CALL ARRAY J Z i Z,I PERFORM SENSOR
PROCESSING. WIPE OUT PTSLS, SET UP SPIRE &
RETURN OPSIMEVENTS AT TIME = CLOCK
< ARRAY AFTER EACH NEXTXNFA
I "0 PRODUCE ACONTOURPLOT OF THE
ARRAY AT THIS
I POINTCALL PLOTO
PROGRAM OPSI (continued)
N; 82
r ~ _ PLOT OF THE

Gr %
FOR EACH CELL (I.J) IN ARRAY
bCOMPUTE INDICES 6HTARGET 9 ACCESS G3RID DATASETOF TARGET POINT (NGD) .COMPUTE AZM. ELV(1,J) & PUT POINT ARRAY TYPE * COMPUTE TOTAL ARRAY COORD OF CELL
A(I.J) = AMAXl(HIl (Nil), KYE ELSI W RAE(2) =FLOAT(I - (NX + IY2)I DIETOS NX &NY)DIR E C TIO N R A E (3)= F LO A T (J -(N Y + 1 M2)
*DIAM
0LOOP OVER PATH DATASETS
FOR EACH PATH DATASET (NIl)(i) ON GRID LIST ILIST
CLOSEST TO THESE CELLDIMENSIONS:RA(K) =RAE Il-,N1l)
* SET UP OTHER PATH DATA- I RE(K)= RAE Il(NI1 + 1)
NOXJ(K+l1) = G 1I(HI) XJIK) =XJ 1(NIl) -
NOo RA(K + 1) =XXX(l) K =l1.4K=ORE(K+l1) =XXX21
SIGMA(K + 1) = SIGMA Il(NIl)
CORX(K+ l)=CORX Il(NII)CE .ORY(K+ l)= CORY II(NIl) I* USE 3-0D PLANAR
NoNE
OLTO
O E
RA
" SET PARAMETERS.VALU AT THIS CELL LOCATION.P63T = AMAFP(2 VRUT PST PSAMETERX. A(I.J) = XJ 1*DY *(I - DX)
DIT MX(,+V BETPS=PSD((MAXF HMINF)) TYEDIST= AMAXI2.RC +XJ2'DX*DYTYPE + XJ3*DX*(I - DY)
H 6 LUDLM1STRUCT=2HNO + XJ40. - DX - W DXDY)IEA WHERE DX=IRAE(2)- RA(I)JDA
_____________T TUUBE______ ONr = jRAE(3)-. RE(lThDE" SET PARAMETERS I. SET PARAMETERS XJI =XJ(ll.EC
POS = P05 DC(ND)X) Pas = Bpas P = STATE(2) DE = DA t3NNGD)CLD. CLLC) 3 3*R85) TU=2NSTRUCT= 2HNO L TRUCT=3HYES I iT.E
ITIVDE'-ORRELATION.K=K 1
I =(CLOCK - TLAST)ICORTT=O. ( X TT =EXP(a) IF .4iO 1 K ETLAST =CLOCK IF T=O0
0INITIALIZE REGIONMAX & MIN DIMENSIONS(AMAX, At..N, EMAX. EMIN) &SET UP CENTER PAT H DATA- N XXJ(l)= HIl(NIl) NXRA(l) =XX-,(I)Nl
CR1XX() R Il(NIl)IRAE(l)
ISIRY GMAOR Il(NiIRl) !TIIESE COORDINATES ARE IN THEKIMl) IM lNl ROTATED FRAME (ALIGNED WITH
__________________________________________________ THE FIELD) FPCOR
SUBROTINE ARPMY: Constructs the focal plane intensity array, given pathdata describing target prints, objects, and grid s
83
AL~

0 SET UP INDICES IN FPCOR COORDINATESIFOR REGION*
NX =IFIX(AMAX - AMIN(2 xDIAM+ I)x 2+ ILNY =IFIX(EMAX -EMIN)I(2 xDIAM +I Ix 2 + I c
FOR EACH CELL (KK. LL)
IN FPCOR COORDINATES
* CONVERT TO SENSORCOORDINATES- 0 INTERF-ULATE FOR MEAN INTENSITY,
AMEAN = (XJI'FACI + XJ2"FAC2 +XJ3*FAC3JFAC4XXX()=RA(1)+FLOAT(KK-(NX+ I)Y2)*DIAM IASIGMA 0XXX(2) = RE(1) + FLOAT(LL - (NY +112PODIAMCALL FPCOR (XXX. RAE. .
STRUCT NO
CELL IN FOV. j!3HYS
/NEXTN NO RAE(2)>AZMI2 YES
CLR>L/ F INTRPOLATE FOR INTENSITY VARIATION ND
9 SPATIAL CORRELATIONS
YES ~ ASIGMA = SIG1 x FA( I +SIG2*FAC2 + SIG3*FAC3yFAC4YSACORX (CORX1 FACI + CORX2*FAC2 +CORX3*FAC3yFAC4I
DOE PAH HROGHACORY =(CORY1"FACI . CORY2'FAC2 +CORY3FAC3JFAC4 -F EXES PAT DAMICORXTHIS CELL INTERSECTH P=EXPI- DIAMIACORY)IREGION PLsi * 0-_______
CALL EXTENT _ _ _ _ _ _
ORL CLU 20OPT RANDOM SAMPLES7
P=0 IF SC(KK-.LL=OP=OIFSC(KK.LL -1)0
YSPLG-0 SIOI =SC(KK. LL - )IS01 = SC(KK -I.LL)
NO I EPS=OEPSi = (1 _ IF
2 + p
2 + T + F
2p
2T
2 -(F
2p
2 F
2T
2 *PT
2)
0LOOP OVER PATH EPS=,EPSI IF EPSI>ODATAETS(N~l ONEPS2 = (I - F
2 - p
2 +F
2p
2(I OBJECT LIST ILISTEP=PTEP2I S>OI TO FIND THREE PATHS ESESTP2I P20
CLOSESTTO THIS CELL SC(KK. LL)= -F*P*SOO+ PLS101 +F*So11XJ(KI. RA(K). REIK) + EPFSRNV(O.1)
I K13
0. COMPUTE ARRAY INTENSITY AT THIS CELL0 CALCULATE DIFFERENCES AOLD =A(I.J)
XJ1 =XJ(l) SiI = SiGMA(I) CORXI CORYi A(I.J(=AMEAN ASIGMA*SC(KK.LL) NEXTXJ2 =XJ(2) S1G2 =SIGMA(2) ( (.JAA1(OD(I)CDELLXJ3 =XJ(3) S1G3=SIGMAt3) MX(ODMA
X24 =RA(2) -XXX(1) Y41 = XXX(2) - RE(l)V23 = RE(2) - RE(3) X2i = RA(2) - RA~l)X32 = RA(3) - RA(2) Y21 = REI2) - RE(l)Y24 = RE(2) - XXX(2) FACI = X24'Y23 +X32'Y24X41 =XXXI) - RA~l) FAC2 = X41 'Y13 + X31 Y41Y13-RE~l)-RE(3) FAC3=X41*Y2 - X21IYA
IX1A3) -RA~I! FAC4=X21*Y23+X32*Y2;
84
_______ _________________

"ACCESS SENSOR DATASETS: -
OD, ST, FV, BR" ACCESS FOCAL PLANE ARRAY
AA(I.)
'S CONVERT NORMALIZED ARRAYjINTENSITIES TO RADIANCEIN (WATTS/CM 2/SR)
A(I,J) = A(I,J)*NEFDIDIAM 2
FOR ALL U, ______
* ACCOUNT FOR BLURRINGOF ARRAY DURING SCAN:
C A LL_____________________________
0GET INDEX OFNEXT TARGETON TARGETLIST(DSP PC(NEVENTS)
0 CREATE THE OUTPUTDATASET (NOM)
* ZERO THE OUTPUT ARRAYIA(I,J) =0.
0FOR EACH PROCESSING BLK0S OSPIRE LIST CALL PROPERNO
ROUTNE TO PROCESS IT:TYEXIICALL SPSUB1 = TARGETLORCALL SPSUB2
e CREATE THE TARGET MEAS.:
NETNO LAST AZMES OM(NOM) =SUMXOOTARGET 1- TARGET ELMES OM(NOM)=SUMYO
? ~RAD OM(NCM)=ARAD*NEFDETC.
YES
EXIT
PROGRAI4 SPIRE: This program calls the subroutines to scan the focal planeand process the data. Also produces ome output datasets
85

* SET UP YCOORD.I XFV02. YFV02" SET LOGICAL FLAG
FOR INSERTINGADDIT BLOCKS
MODE- OTHER HERE WE HAVE LEFT SPACE FOR
TP STORED SCANIPROCtSSING BLOCKTYPE IMODELS? GENERAL MODELS
THIS PATH FOR SCANIPROCESN 1 KF (MODEL SS(NSS) EOMODELS THAT ARE READ IN THE 1OHSURVEIL-01) CALL DATAIINPUT DECK 110HSURVEIL - 02) CALL DATA2
_ 10HSURVE!L -03) CALL DATA310HSURVEIL-04) CALL DATA4 SEi. SCN FLG 1
COMPUTE: RO SL, TH, PH &
AND SENSOR TYPE SIN(TH)DATASETS: OD, ST /_ _EXIT__ ARRX(J) = (RO + BLK(2.1)(J - 11*
I 1 ARRY(J)= YCOORD - SIGN((RO+3LK(2,1)IJ- 11)I "COS(TH,, .COORD)}
G ET SPIRE PROCESS I IO(H, COD
BLOCK LIST: CIRCULARLHV SPIRE SS(NEVENTS) J I SET SNLT ARRX(J) = BLKj3.IOUT) LINEAR SCAN SS(NS,
0 SET PARAMETERS FOR SPIRE 1 ARRY(J) BLK(4.IOUT) +SYSTEM BLOCK= I BLK(2.1)'IJ -
BLKS, = 1IBLK=1BLK(1,1)=3 -_
BLK(2.1) = DIAM ST(NST)BLK(3,1) = BLUR ST(NST) IBLK(4.1) = FLOAT (NDET ST(NST))BLK(5,1) = DNEF ST(NST)
BLK(6,1)= DNEFB ST(NST)
FOR EACH BLOCK (ND1)ON SPIRE LIST LHV
0 SET: BLKS-BLKS+, + I * READ DATA FROM SET:IBLK = IBLK + 1 O .ARRAY INTO BLKS NDET NDET ST(NST)
0 GET NUMBER OF WORDS IN ARRAY NEX BLKOT)" 2,4 1TIS BLOCK: BLK(I.IBLK)= NOI +BLK (B31) LK2V4.
IDX = IFIX (Q(NO1)) OO(NOi.I) SCS = BLURO-
NMBR=NDO(ID)FR.MB OUTFLG 2.jDX | FOR I =1.NMBR
SUBROUTINE INSENS: Initializes SPIRE scan/processing computation blocks
86
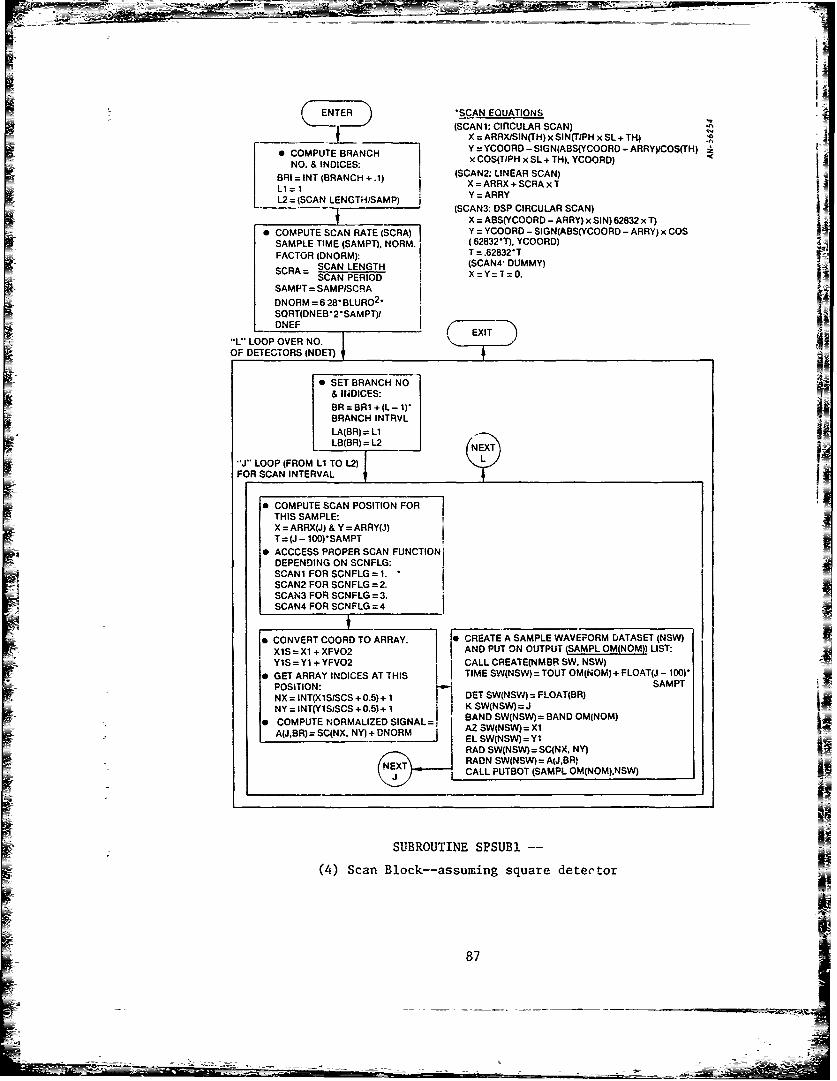
IENTER *SCAN EQUATIONS(SCANi: CInCULAR SCAN)
___X =ARRXISIN(TH) x SIN(TIPH x SL + T* COMPTE BR N~~] Y = YCOORD - SIGN(ABS(YCOORO - ARRY)JCOS(TH)
NO.PT BRIND CES x COS(TIPH x SL + TH), YCOORD)
BRI =INT (BRANCH +A) I (SCAN2: LINEAR SCAN)I X=ARRX+SCRAxTL1=1 YAR
L2=(CANLENGHISMP)(SCAN3: DSP CIRCULAR SCAN)______X = ABS(YCOORD - ARRY) x SIN) 62832 x T)I*COMPUTE SCAN RATE (SCRAIR Y =YCOORD -SIGN(ABS(Y'COORD -ARRY) xCOS
SAMPLE TIME (SAMPT), NORM. (62832-T), YCOORD)FACTOR (ONORM): I T=.62832*T
SCAN LENGTH I (SCAN4- DUMMY)SCRA = SCAN PERIOD I X=Y=T=O.
SAM PT =SAMPISCRA
DNORM = 6 28-BLUR02 .
SORT(DNEB-2SAMPT)i IDNEF
EXIT5"L- LOOP OVER NO.OF DETECTORS (NDET) rf
~~a-0SET BRANCH NO
& IN4DICES:BR= BR + (L -1)"BRANCH INTRVLLA(BR) = LiLB(BR) =L2 _ NX
"J" LOOP (FROM LI1 TO L2LFOR SCAN INTERVAL
COMPUTE SCAN POSITION FORTHIS SAMPLE:
XARRX(J) & Y = ARRY(J)
T=(JCOSMPE SCAN FUNCTIONSDEPENDING ON SCNFLG:
-0SCAN1 FOR SCNFLG = 1.SCAN2 FOR SCNFLG =2.SCAN3 FOR SCNFLG = 3.SCAN4 FOR SCNFLG= 4
F,~~~.ICONVERT COORD TO ARRAY. 0CREATE A SAMPLE WAVEFORM DATASET (NSW)
XlS = X1 + XFV02 AND PUT ON OUTPUT (SAMPL OM(NOM)) LIST:Y1S= Y1 + YFV02 I CALL CREATE(NMBR SW. NSW)
* GET ARRAY INDICES AT THIS TIME SW(NSW) = TOUT OM(NOM) + FLOATcJ - 100)*POSITION:,-. SAMPTNX = INT(X1SISCS +O05) +l DET SW(NSW) = FLOAT(BR)NY = INT(Y1StSCS, +0.5)+l K SWNSV =
*COMPUTE NORMALIZED SIGNAL=1 ADS(S~ ADO(O)IA(J,BR)=SC(NX, NY) +DNORMi AZ SW(NSW) =X1
_____________-~ EL SW(NSW)= Y1RAD SW(NSW) = SC(NX. NY)
CALL PUTBOT (SAMPL OM(NOM).NSW)
SUBROUTINE SPSUB1 -
(4) Scan Block--assuming square detector
87

ENTER
*COMPUTE BRANCH & INDICES:6= NT(BRANCH NUMBER --. 1)
Li = L.A(BR)L2 =LB(BR)X0O
"J" LOOP (FROM Li TO 1-2)FOR SCAN SAMPLES
10LOOP OVER KTO
FORM GAUSSIANRANDOM VARIABLE:X =X +RAN F(O) -. 5FOR K=1, 12
*ADD RANDOM ERRORDUE TO DETECTORNOISE TO NORM. NEXTSIGNAL:JA(J,BR)=A(J,BR)+X
EXIT
SUBROUTINE SPSUB1 -
(5) Detector Noise Block
88

ANOMUT BRANCH NUMBER. INDICES
ADSTANDARD DEVIATION FOR THISBRANCH:
BR = INT(BRANCH NUMBER)SIGMA= l.14.IBAN D PASS *SCRAISAMPLi = LA(BR)
L2 =LB(BR)Li L - INT(3-SIGMA + 1)1
ZERO THE B(J)ARRAY:B(J) =OJ =L3, L4
0PERFORM SMOOTHING FOR J =Li TO 1-2: 1J1 = J - INT(3*SIGMA + 1)J2 =J +INT(3-SIGMA +1)B(K) = B(K)+ [EXP( - (J -K)* *2/2.iSGMA *2)I
SORT (2w)ISIGMA'S(J.8R)JFOR K=Jl TO J2
* RESET THE SCAN INDICES:LA(BR) = L3LB(BR) = L4
" AND THE OUTPUT ARRAY:A(J.BR) =B(J)
FOR________ J____ =____L3______TO ______L4 ___
LOOP OVER ALL SAMPLEWAVEFORM DATASETS (NSW)
NO YES SET OUTPUT VARIABLES:NSW =T SW(NSW) J = K SW(NSW) EI
FLOAT (BR) RADS SW(NSW) =A(J.BR) - E
SUBROUTINE SPSUB2 -
(6) Gaussian Smoothing Block
-D9

SUBROUTINE SPSUBI(26) OUTPUT BLOCK - DESIGNATES SIGNALS ABOVE THRESHOLD
VALUE AS TARGETS FOR OPTION OUT2IUSED BY MODEL = SURVEIL - 02; OTHER
ENTER OPTIONS INCLUDE:OUTi TARG SW(NSW) = 9HBRIGHT PT
FOR SAMPLES ABOVE THRESHOLDOUT3 - TARG SW(NSV) = 6HDIM PT
0 OMPUTE BRANCH FOR A(K,BR) 5.6NUMBER: TARG SW(NSW) =9HBRIGHT PTBR = INT(BRANCH) FOR A(K,BR)>,3O.NUMBER) OUT4 - TARG SW(NSW) =6HBKGRND
LOOP OVER ALL & IN ADDITION CREATES TARGETWAVEFORM SAMPLE MEAS. IN SENSOR COORDINATESDATASETS (NSW) ________
NSW =FLOAT(BR)
0SET OUTPUT VARIABLES:
K =K SW(NSW)RADD SW(NSW) = A(K,BR)TARG SW(NSW) = 0.
NSXWN THRESHOLD
YES
*RESET TARGET DESIGNATIONFLAG:TARG SW(NSW) =6HTARGET
EXIT
SUBROUTINE SPSUB1 -
(26) Designates signals above threshold value as targets for option OUT2F used by MODEL.= SURVEIL-02
90

A
PROGRAM OTRACK -. THIS PROGRAM SIMULATES THE TRACKING OFAN OBJECT BY AN OPTICAL SENSOR. THESEOPTIONS ARE ALLOWED:
ENTER (iJAUTONOMOUS SENSOR TRACK - SENSORIS GIVEN SOME RANGE EST. FROMANOTHER SOURCE & TRACK IS INITIATED
-.*~A. A E AUTONOMOUSLY PIACO BR(NBR) =3HYES&
NOB. NOD, NOP. NBR. ISNET BO(IBASE) =2HNO)NSE NETTED SENSORS - SENSO,' MAY PERFORM
ACO. & MEAS. ARE NETTED(IACO = 3HYES. SNET =3HYES)
033 NETTED SENSOR NO AGO - OPTICAL SENSOR,--KTRAK TS YES CANNOT ACO (IACO =2HNO. SUET =3NYES)
< (NEVENTSi:0v
EXIT NO -!0 ACO ERtNBR >
YES4_ _ _ _ _ _ _ _ _ _ _ _
AUTONOMOUS SENSOR TRACK. 1ST LOOK SBEUN OK10GET MEAS DATASET (NOM) FOR * COMPUTE LENGTH OF TRACK FILE & SET
OBJECT CORRESP TO THIS EVENT KUTFA*PRODUCE RANGE MEAS & TAKE 1 j NWDS=A -- ONE LOOK
ELV & AZM MEAS FROM (NOM) OUT 2 NWDS a - TWO LOOKS* CONVERT TO XYZ COORO 3N WNDS = 12.- THREE LOOKS
- CAL OTRN 14 NWDS>12 -. TRACK FIL7 ESTABLISHED,e CREATE A TEMPORY TRACK FILE OF o GET MEAS. DATASET (NOM) FOR OBJECT
4 WORDS TO HOLD TIME. POSIT CORRESP. TO THIS EVENTF ~WITH DSP WORD = KDSPW 0PRODUCE RANGE MEAS. FOR KOUNT43* FIND NEXT LOOK EVENT ON EVENT OTHERWI1SE USE EST. PRANGE & GET
LIST & SET ELV & AZM MEAS.
KTRAK OLIN VNT) =KD)SPW 0CONVERT TO XYZ COORD
12ND & 3RD LOOKS <3THI MES WS=ND EXPAND TRAC.K FILE TO :NCLUDIE - KOUNT?
* FIND NEXT LOOK EVENT ON EVENT ILIST &SET - IKTRAK OL(NVNT) KTRAK TS(NEVENTS) I0SET UP SiGMAT MATRIX &SIGMA ARRAYS:
L ISIGMAT(1.1) = RERR TS(NEVENTS)-2I SIGMA(1) =SORT(S;GMAT(1.1))I SIGMAT(JJ) FXE SE(NSE + J-2)* 2
TSNE SENSE + J - 2)' NR mISIGMA(J)SOR(SIGMAT(J.Jfl
PROGRAM OTRACK, Simulates the tracking of an object by an optical sensor
91v
- ~- ~ - -~A

_
0-
< o LL~=
a: : ci:0W Dac: w '0
> a: 0I-' Cl)
002 z I.-
I >
I-- - IJY 0 u U) 02x0I i
< i-
0 w a
C.0Z) I
w ~ Z 0 .a .
3
zz co
0 .Z
0i z r-z-F. (
0
_l
0I - -E :u
z a. z 92
Cl)_ W Ii ac

DISTRIBUTION LIST
DEPARTMENT OF DEFENSE DEPARTMENT OF T14E ARmy(Cnne)
Assistant to the Secretary of Defense U .Am aelt omiAecA T T N E x c u t v e A sis a n tA T T N : D o c u m e n t C o n tro lDefense Advanced Rsch Proj Agency US ryTAO ytm nlssAtvtATTN: TIO .S AmTy TAAPyses nlsi ctvtATTN: 510, S. ZakanyczATN A-PDefense Comunications Engineer Center DEPARTMENT-OF THE Noy
AIIM: Code R410, J. M leanNaval Electronic Systems Coom nndDefense Nuclear Aciency ATTN: PE172ATTN: RAAE A :PE172ATTH: RAAE, P. Lunln Naval Itliec upr t4 cv ATTN: TITL nelgne upr tATTN: Document ControlDefenseTT eN ica nf rmtion Center Navai Ocean Systems Center12 cy AIIM (IDA T T N : C o d e 5 32Field CormandNaaPotrdteShl
Defense Nuclear Agency N aTN: Cosgrdae 1424liryATTN: FCPRATN Coe12Liry
Fiel ComondNaval Research LaboratoryDefense Nuclear Agency ATTN: Code 467, .BrnLivermore Branch -ATTN: Code 4700, J. CrofeATTN: FCPRL ATTN: Cd 70 .Cfe
AT:Code 4780, 5. OssakowNatinal ecurty AencyATTN: Cod? 4780, P. PalmadessoN ATN ScRity, Agency maATNATT: -5, 3.SkllanAIM:Code 4709, W. AliUndesecetay ofDefforRsch& EqrgNaval Surface Weapons Center
ATTN: Strategi c & Space Sys '(OS)ATN CoeX1WWICS Sste EngneeingOrgNaval~ Surface Weapons CenterI IR .C S y t m E n er i ngfo rgA C o d e F -1 4 , R . B u t l e r
DEPARTMENT OF HE ARMY SrtgcSsesPoetOfcAtmospheric Sciences Laboratory ATTN: NSP-2722, F. WimberlyU.S. Army Electronics R&D Comand ATTNJ: USSP-2722, M . MeseroleATTN: DELAS-ED, F. iles DEPARTMENT OF THEAR FORCEBHD Advanced Technology CenterAiFocGopycs
abrtyDepartment of the Ar' ATir Fo PRe A.pysc SaoratrATTN: ATC-T, M. Capps ATTN: OPR, H. StarirATTN: ATC-o, w: Davies ATTN: SULL .Gadie8140 Systems Coriand ATTN: LKB, K. ChampionDepartment of the ArmyATTN: BMDSC-HiW, R. Dekalb Air Force Systems CoymmandHarry Diamond Laboratories
ArFreTcnclAp ctosCneDepartment of the Army Air Iorc Technical AplibarynCneATTN: DEI.HD-I-I'LATN TehiaLbryATTN: DELRD-h-P, F. Wimenitz hTTN: TFR, C. Meneely-i
Air Force Weapons LaboratoryU.S. Army Foreign Science & Tech Ctr ArFreSsesCninATTN: DRXST-SD ATrIorc SULemsCmmnU.S. Army missile Intelligence Agency ATTN: DYC
ATTN: J. Gambtle Ballistic Missile OfficeU.S. Army Missile R&D Comand Air Force Systems Command
ATTN DRDI-XSATTN: MMxATTNJ: RMI- ATTN: MNRCATTN: RSICATTN: M NRTE('.5. Army Nuclear & Chemical Aqency
ATTH: Library
93
Er_ _ __ _

I
a
DEPARTMENT OF THE AIR FORCE (Continued) DEPARTMENT OF DEFENSE CONTRACTORS (Continued)
Deputy Chief of Staff General Research CorpResearch, Development, & Acq ATIN: J. Ise, JrDepartment of the Air Force ATTN: J. Garbarino
ATTN: AFRDSJamieson Science & Engineering
Headquarters Space Division ATTN: J. JamiesonAir Force Systems Command
ATTN: SKX Kaman Sciences CorpATTN: SKA, M. Clavin ATT:i: N. Beauchamp
ATTN: D. PerioHeadquarters Space Division ATTN: P. TracyAir Force Systems Command
ATTN: SZJ, P. Kelley Lockheed Missiles & Space Co, IncATTN: D. Divis
Rome Air Development CenterAir Force Systems Command Lockheed Missiles & Space Co, Inc
ATTN: OCS, V. Coyne ATTN: M. WaltATTN: TSLDATTN:. OCSA, J. Simmons M.I.T. Lincoln Lab
ATTN: D. TowleStrategic Air CommandDepartment of the Air Force IcDonnell Douglas Corp
ATTN: NRT ATTN: R. HalprinATTN: XPFS, B. Stephan ATTN: H. Spitzer
DEPARTMENT OF ENERGY Mission Research CorpATTN: D. Archer
Department of Energy ATTN: D. SkppenfieldATTI: OMA ATTN: F. Fajen
ATTN: R. HendrickOTHER GOVERNMENT AGENCIES ATTH: R. Bogusch
ATTN: M. Scheibe
Department of Commerce ATTN: R. KilbNational Oceanic & Atmospheric Admin
ATTN: F. Fehsenfeld Nichols Research CorpATTN: N. Byrn
Institute for Telecommunications Sciences TATTN: G. Falcon Pacific-Sierra ResearchATTN: W. Utlaut ATTN: H. Brode
DEPARTMENT OF DEFENSE CONTRACTORS Photometrics, Inc
Aerojet Electro-Systems Co ATTN: I. Kofsky
ATTN: J. Graham Physical Research, Inc
Aerospace Corp ATTN: R. Deliberis
ATTN: J. Reinheimer University of PittsburghATTN: I. Garfunkel ATTN: F. KaufmanATTN: N. StockwellATTN: V. Josephson R & D AssociatesATTN: N. Cohen ATTN: R. LelevierATTN: J. Stiauss
ATTN: F. Gilmore
ATTN: P. HaasBerkeley Research Associates, Inc ATTN: B. Gabbari
ATTN: J. Workman ATTN: R. Turco
ESL, IncESL, IcR D Associates
ATTN: J. Marshall A t .ATTN: B. Yoon
General Electric Co Rand CorpATTN: M. Bortner ATTN: C. Cram
General Electric Company-TEMPO Science Applications, IncATTN: T. Stephans ATTN: D. HamlinATTN: J. JordanoATTN: DASIAC Science Applications, IncATTN;: M. Stanton ATTN: W. MendesATTN: W. Knapp
94!Ae
Ri

DEPARTMENT OF DEFENSE CONTRACTORS (Continued) DEPARTMENT OF DEFENSE CONTRACTORS (Continued)
SRI International Visidyne, IncATTN: W. Chesnut ATTN: C. HumphreyATTN: W. Jaye ATTN: J. Carpenter
ATTN: H. SmithTeledyne Brown Engineering
ATTN: Technical LibraryATTN: G. Harney
ATTN: J. Cato
95

96