the mars exploration rover surface mobility flight ... · the mars exploration rover surface...
TRANSCRIPT

Published in 2006 IEEE Aerospace Conference Proceedings, March 2006, Big Sky, Montana, USA
The Mars Exploration Rover Surface Mobility Flight Software:Driving Ambition
Jeffrey J. Biesiadecki and Mark W. MaimoneJet Propulsion Laboratory
Pasadena, CA [email protected]
Abstract—
NASA’s Mars Exploration Rovers’ (MER) onboard Mo-bility Flight Software was designed to provide robust andflexible operation. The MER vehicles can be commandeddirectly, or given autonomous control over multiple aspectsof mobility: which motions to drive, measurement of actualmotion, terrain interpretation, even the selection of targets ofinterest (although this mode remains largely underused).
Vehicle motion can be commanded using multiple layersof control: Motor Control, Direct Drive operations (Arc, Turnin Place), and Goal-based Driving (Goto Waypoint). Multiplelayers of safety checks ensure vehicle performance: Com-mand limits (command timeout, time of day limit, softwareenable, activity constraints), Reactive checks (e.g., motor cur-rent limit, vehicle tilt limit), and Predictive checks (e.g., Step,Tilt, Roughness hazards).
From January 2004 through October 2005, Spirit accu-mulated over 5000 meters and Opportunity 6000 meters ofodometry, often covering more than 100 meters in a singleday. In this paper we describe the software that has driventhese rovers more than a combined 11,000 meters over theMartian surface, including its design and implementation,and summarize current mobility performance results fromMars.
Keywords—����������� ��������������������������� � �"!�#��$��%&�(')���*���
�*��+��-,���.�0/"�"�(1�����23��4.�,5�26�746�8�9�"!:����0�4;��%<��2./"��=.������>��0�4;��9�0�26��/?9@.�,5�A�*�1��3��!��,5���0�4
TABLE OF CONTENTS
1 INTRODUCTION 1
2 MER FLIGHT SOFTWARE ARCHITECTURE 2
3 MOBILITY MANAGER SOFTWARE 3
4 LOW-LEVEL DRIVING 4
5 AUTONOMOUS DRIVING 5
PRIMARY AUTONOMOUS CAPABILITIES 5
TERRAIN ASSESSMENT OVERVIEW 7
ROBUST STEREO IMAGE PROCESSING 8
TERRAIN ASSESSMENT 8
B0-7803-9546-8/06/$20.00 c
C2006 IEEE
AUTONOMOUS GOAL SELECTION 10
6 DEPLOYMENT RESULTS 10
SOFTWARE VERSIONS 11
7 CONCLUSION 13
8 ACKNOWLEDGEMENTS 13
1. INTRODUCTION
Figure 1. Mars Exploration Rover.
DFEHG3EI�26���A���*�J%K2./"/01H/0��46@3��@L�('MN,5��6�"/0���*��+��;!����/0�!��0�J�*�O�4�#6�H�2.�%<���A�P�%;�����*�M�04RQ:��4926���*1�S�T�T�U6VW�*#.�LG9=.�0��"�)��46@YXP=.Z=+���2.4.�"�(1[�����*����\3=./0������*�"�4[�N������*�R]<���M�F^>_�`)#.���"�5=.�*�"Z,a���*1b!����/c�0�$�Id646@e���:��@3��46�A���%�=6���J�f')���*���R���YgH26����h ��������P��46@i�j�����@3����4.�-k�/���492.,l�+�('m$!����/0�!�������/"/01R@.�0�J��046�>���n�*���o�4p�=.=+���"��q�J��@3���o�%$�#.�q=./���46�A��_rEc/"�#.�2.!�#s�#6�����#6�"������,5��4��a�%P�*#.���0�R�26�������*�(%K26/c/0��46@3�04.!��a�J�*��46@.�a�23�R����i�����#64.�/0�!��0����/��*�2.�5@3�Y%K����A�����n�5���t�*#.���0�a���.�0/0�n�(1u�*i�*�*��Z�����*��)'N#.�0/"�N�4v�*#.�F�2.�%<���A�)�%O�����*�7�*#6���M#6������46���6/"��@v�+��*#�*����������$�26��������@R�04R�*#.���0�N=.�*�",a���1$!����/0��_
`)#.�m�����w�*������*�?������(1:=6�0����/0/"1x�A�,�,a��46@3��@��46����= ���7�i���Z�����4�@6�81�_cEy���z:2.��46�A�L�%��A�,�,a��46@.�c���4:�P�04l�#6�t,5��*4.�04.!�= ���A�"d6�����#.�f@6�81+{ �����>��0�9�n�*�"����V�'N#6���t�",a��!����t��46@w@.���*�Y�*�A�/"/0���A���O#.�'|�R= :�J�"��0�4��#.�v��� �����t���*,a���O��4 @j'N#.���*�L�*@3�*�"����_-`)#.��4R�����*#.�F��46@a�%O������#$@.�81����*#.�F�*������*�����4 @a�6����}�#6�$�",a��!����v��46@u@.���*�j#92.,a��4w�=+���������*�x'N�0/0/�26��a�i=./0��4�#6�t4.��\:�L@.�81O{ �F���A��0�9�n�*�"����_H`)#.�t4.��\9�H@.�81O{ �c,5��.�0/0�n�(1j�A�,�Z,a��46@6�c���*�L�J��/"���>���@f� �����@Y�4Y'N#6���c���N}94.�'N4f~f��46@Y'N#6���
1

���)2.4.}94.�'N4R~f���+�23�)�#6�x����*�����04Y��#.����@?_
`)#.�����������F����5@3�*�"����4�26��04.!f�*#.�*���5=.�*�",a���*1l,59@.����VF/0�')Z/0������/��A�,5,a��4 @.�P�#6���L�=+���A�"%K1���\3���>�*/"1l#.�' ,v26��# �R�2.�*4������#x'N#.����/���4 @P=+���"��0�4��J�������04.!c���>�2 �����*����@.�"�*���A���@L@.��0�:Z�04.!i=.�*�0,��"��0�����L%K��v@3�*�"�9�04.!i��/"�4.!i�A�0���A2./����t���*���f]<�%c'N#.����#�J������0!�#:��/"�04.�H@3��0�9�"46!���46@��*2.�4.Z �043Z =./0���A�F����c�=+���A����/+�����J���*^A���4 @e��23�*�4.�,��26�a=6���# ���/0���A��0�4W_��;�')Z /0������/F���,5,a��46@6���4 ���./0���J4.�43Z �(����46@.���*@��M���>��0�9�n�*�"���;�26��#L���?2 �J�04.!)�#6��'N#.����/0��b@3�"!I#.�/0���f�"4 �����J�*�0��4 �J��"/ �N���2�� �3��}3���N��46@q= ���J%K��,,5����#6��4.���J, #.����/n�*#I@3����!�4.��J���������(����_P�0����>���@[@3�*�"�����v��/"Z/0�' #92.,a��4q�= ���*���������[�=+���A�"%K1 �A\.���A�/01I'N#.����# @3�*�"�9�04.!=.�*�",5�"��0�����m�#.���*������M'N�0/0/W= ���J%K��,l_�EF23��4.�,5�2 �N=6���*#j�J��Z/0���>�*�"�4[,53@3�Y��/"/0�'c�L�*#.�Y���������*�����}��R�n���5�A2.�*���4:�v�(�����*��04��*f�����A�2.4:�F'N#.��4����/0���A��04.!$'N#.����#i@3�*�0�:�04.!a=.�*�0,��"��0�����N�*�A\3���A23�*���R,5��*�����O���A��0����/01l�������#�� h �����������4l!�:��/;/03����Z��0�4j�2.=.=./0�0��@Y�91$#92.,a��4Y�=+���������*��_
`)#.�q,5��.�0/0�n�(1p�J13�J���, #6���w��n\ S � �A��4:�*�",5�A�*���I@.�0��,�������'N#.����/����O�%�'N#6�0��#j�*#.�v%K�2.�x�A��4.���F'N#.����/��F,a�81l�+���J������*��@~s� ,5����#6��4.������/$���43d !�2.�����*�"�4s@3����0����@y%K�*�, �#.� �i�����k����*#3d646@.���Y�������YG3��(�26�4.����������� _ `)#.� �*������f�+3@31 #6���� Ti�A��4:�*�",5�A�*���v!��*�2.46@w��/"��������46�����-��46@u/����*!��$��/����v=6��46��/���4[�#.�f��=I�%N�#6�f�*������t���z�26�"�*�f��@6@3�n�*�"�46��/m�A/0�����*��46�A�5�*�*��/"/M�3��}3�a]���T��A��4:��0,�������*�x%K�*�, !��*�2646@ �i��/����L=6��4.��/&^>_�e#.����/-�6�����/0�04.�����F�*�2.!�#./01��v,�������H��0@.�AZ ��Z ��0@3�v��46@���_ S��,5�A�*�����-%K��4:�JZ ��Z �6����}+_7`)#.�F���M�q���������-����4��*2.�4a�04$=./���������+�2.�o�e=+��04:� �+�A�('m����4 �#.�I�('M ,5��@.@3/0�b'N#6����/����v@3�*�"����J������0!�#:�W%K��*')����@x��;� ����}9'm���*@W����46@L#6�8�������-� ���(�-�c�4.��,5�AZ����H�2.�*4�����@3�026�F%K��L@3�*�"�9�04.!R��/"�4.!f�A�0���A2./����x��������_xG9������0!�#:�/0�"4.�x@3�*�"�9�04.!v�=+����@f�0�)��A�m� � _���������4:��0,5�A�*����� ���J���A�4 @?����46@�#6�a���������c�*2.�4o�04o=6/0���A�a�����*�2.!�#./01iS3_!�5@.��!��*����� ���J���A�46@?_`)#.�R���������L���*�f�(�����*�0����/0/"1w�J�*���6/"�f��������0/n���%cU"��@3��!���������#.�'m�������5@3��0�9�"46!o�4q,����Y�*#6��4 � Tu@3��!��*���l�J/0�=+���a���54.���*���A�,5,���46@3��@a@32.�N�*��#6�F=+��*�J�0�.�0/"�"�(1v�%?2.46�A�4:��*�/0/"��@��/0�0@9Z�04.!6_f�c9��}3�H����/0/"���L�#6��4w�l'N#.����/����*�a�A�4 �J��@3���*��@ ,5��.�0/0�n�(1#6� #�����@.��_
$m��*#u@.�"�*���A���@w��46@o=6���*#[�J��/"���>�*�"�4o,53@3�����%c@3�*�0�:�04.!j����4,a��}��P26��x�%7�43Z � :����@fG:�*���*��&%F���J�0�4Y=.�*3�A���*��"4.!���46@Y` ���Z�����04bEc4 ��/019�������%&�(')���*�a�*u@.�A����,5�04.�Y'N#.�A�*#.���5�*#.�R�*������'m�2./�@L��4 �A�264��*���-��491H!����,5�A��*����#6��#�����@.�;���;�"��@3��0�����;��/"�4.!�"�*�x��#.����4i=6���*#W_(' 4 @.�"�*���A���@ @3�*�"�9�04.!6�O�*#.�v�*������P����4i=6���Z��,5=3�*�"����/01)�����A�*��5�a�= ���A�"d �L,5��.�0/0�n�(1Y�A�,5,a��4 @Y%K��, �#6�!��*�2646@j�"%��n����=.= �������N�*:Y�*�0�}91�_*' 4 EF23��4.�,5�2 �PDP�8�:�0!���Z��0�4$] Ec23�*�46�8�.^;��46@x��#.���;=6���#t���/0���A��0�4L,53@3�������#.���*����������4R���/0���A�m�"�*�)�'N4f@.��0�9�"4.!�=.�*�",5�"��0�������*��J������)���*�2.4 @$��.Z�J�*����/"������4 @v,a��}��N=.�*�!������ ��')����@v�n����!�:��/ _ `)#.������%&�(')���*�=.�*��9�0@3���a�*#.�i2.46�0z:2.�o����= ���.�0/"�"�(1q�%���46���./0�04.!w�#6� ����#.���A/0��l@3�*�"���v�*��%K��/"1l������4i�#.�*�2.!�#i���*�����c4.�������P�+�A%K���5�J����4��4�����J�*#WVx,5��*�v�*#6��4[S���T�Tf,5�A����*���%��*#.�a�*���������{+���,t�6�"4.��@@3���(����46���x'm���N@3��0����4Y��23��4.�,5�26�J/01+����S�� _
`)#.�5�*��������P,5���"4:�����04o��4 ���(�*�",a���*�5�%��*#.���0��/03����/-=+���n�*�"�4��4 @$��*�0��4:�*����0�4$2.=O@.�����@Y���-,/.-#H'N#.�0/"�L@3�*�"�9�04.!6_�k-:�J�"��0�4���td �*�J�a���J��0,5�����@[�6���J��@[�4 #.�' ,v26��#[�*#.�l'N#.����/0��#6�8����26�4.��@$]K'N#6����/:3@3�,5����*13^A_-XP�*�"��4:�*���*�"�4L�0�;���J��0,a�����@L26��"46!
��4/' 4.���J�*�0��/.�j�����J2.�*��,5��4��10c46�n���*#6����#6��� � Z ��\3���7��������/0���*�,�Z�A�*��������46@ � Z ��\3���7��4.!�26/0���7�����*�m���4 �J��*��_2' 45� ���('M����45@3�*�"�9�04.!=.�*�",5�"��0�������+�#6�v�*������F����4�,a��}��t26�J���%�����,5������Z �6���J��@)%P�nZ�26��/�XH@3�,5����*1u] ��23�*�4.�,5�26�F�������}9�04.!$�%M�",a��!���%K�����26������4 @j�J2.� �J��z�26��4:�P�*������N,����0�4j���(�*�",a���*�"�4 ^)�*f�A���*���A�c�#6����*�*������04$�#6�P�04.�"�����/?'N#.����/O3@3�,5�A�*�1:Z �6�����@5���(�*�",a����P�#6���3����2.�x'N#.��4i�#.�5'N#.����/��x/":�J�t������>�*�"�4i�4i/����*!��t�*3��}3�P��46@�J�����=[�J/0�=+����_3%P�0�26��/)XH@3�,�����*1 ��%&�(')���*���W46��t���0!��046��/0/01=6���J�5�%c�*#.�l�6�����/0�04.�R@3���J�0!�4b�.23�a�046�A��=+������*��@[�����A\9�����A�*��@.�n� �.��#6���-!���46���������@L������-S���T�TF�A�,t�.�04.��@v�26�������*�(%K26/:=+�Z��n�*�"�4R2.=O@.������c�4l� ��#l�*��������4� ��� _
2. MER FLIGHT SOFTWARE ARCHITECTURE`)#.� ���������/0/f���*��#.�"����>�*2.�� �%j�#6�|���M� �6�0!�#:� ��%&�(')���*�')���P�6�����@i�4��*#6���L26���@�%K��H�#6�������*�xk����#3d64 @3���H/0��46@3���]<�ik65�^>�O��46@Y�*#.�v���,5,a��46@j��46@Y���/"��,5�A��*1Y�"43%K�����J��*26�A�2.�*��04j=6�������A2./����F#6��@j��"!�4.�"d ����4��F@.����"!�4l��46@l�0,�=6/"��,���4:�*���*�"�4�04.#.���*�"�*��4 �A��_
$m��*# ��k75q/0��46@3���x��4 @i���M� �*��������N26��v�#.�5�A�,�,5���*���0��/�=+�������*�"46!u�13�(�*��,8%F\�� ��}3��%K�*�,8�e�046@q�N�0������_ `)#.���5�0���=6���Z ��,�=.��0���F,v2./"��"Z �����}:�04.!aXxGa26���@$%K��m,5��491��*����/nZ ��0,5��19�J���,a�;��4 @L�J=6���A���A����%&��_ �����w��,5=./"�13�O�*#.�M�*��,5���FE94� :�6�0!�#:�7���,5=.23�*���7���W2 �J��@L�91F�*#.�m�ik65R/0��46@3���m]<��/n�*#.�2.!�#L�#6����M�o��/"3��}P�2.4 �W��� S�TN�+.-#���%K�2.�?�*�",5���?%<���J����W�#6��4���k65�^>���4 @l#6���c�&%H���e�04:����%<�����x�f�����������/?�+����*@.�m�*#6���H�A�4:�*��/,5��*������9����@3�0����:����,5���������9��46@R����"��46�A�H�"4 �(�*�2.,5��4�����_�G9�,5��%P�#.�;%H���p� :����@.��#6�8���l����*�0��/m�04:����J%<���A�����*u��#6���a@3�AZ�9�0���������"4:�*���%<���A��@x�P�#6���6�0!�#:���A�,�=623���� �91L')�81P�%<5-kMgxEF��# ���m���4.46���>�*��@5�+��*#a�#.�9%P���I�.26����46@5�*#.�F����*�0��/6�.26�*�����_`)#.����N���*�4��S�,H�j�91:����-�%=P�cEP� ��46@5S � �P�j�91:����-�% � ���#,5��,5��*1��3��46@ � �j�91:����m�%7�M��kM�NXH�[_:`)#.�L�j��.�0/"�"�(1a�*���J}]<@.���*�A�*�"�+��@f� ��/"�'F^M���M!��"����43,�T>:x�91:������%7�J�*����}+�9��4 @f4.�,�Z�046��/0/"1?� � �j��!����:1:�*���x�%c@3��@3�������*��@o#.����=[�=6�����l]<�%N'N#.����#���v,�:�(�/�Y���:1:�*����# ���L�+����4w26�J��@?�-���L�%FXH�A��� ���vS�T�T���^A_`)#.�F�6�"!�#:�m��%&�(')���*�N�n���J��/n%;�*��z:2.�0�*���A@v�j�91��*�������%W'N#.����#+��_ U�j�91:����)�0�N2 �J��@f�91$�*#.�tG92.�%<�����LDF�8�9�"!:���*�"�4f,53@32./0��_
�W�0}�����k65m�+�#6�����M�y��%&�(')���*�����P@3�0�9�0@.��@ �"4:�R#.�0!�#3Z /"������/��B�(���>����_��M����#$��/"���>��*�46�0���m@.���9�0���P���m!���4.������/0/"15�*��=.�*�����4:�*��@�91v��4�����(���A����'N#.�"/0�F��@.@3�"��0�46��/.�J�%&�('m�����Z �4./"1L����(���A�*��=6��Z�9�0@.�Y�043%K�����J��*26�>�*2.�*�l����*�9�0�����v�o�*#.�l����(�a�%P�#.�j,53@32./0���]&%K����A\.��,�=6/"�����*���A��*@.�"4.!P���/"��,5�A��*1t,5�����2.���,5��4:�*�-����(�*��Z�04.!a�(������L�04l4.�49���/�����0/0�P,5��,5��1.^>_
������#[�J�%&�('m����f����(���>�v# �����"�*���'N4u�*#.�����@w�%F�A�4��*��/ �-���*���J}O_�������#$��B�(���>�N#6���m�n���)�'N4R��A�N�% �J�*����x�����*�0���./0�����:��46@@39���t4.��5�J# ���*�a,���,5��*1 'N�"�#[��#.���t����(���A�*��_;' 46�(�*����@u�%�#6���*�"46!j,���,5��*1��7����(���>�*�v�A�,�,v2.4.��������$'N�"�#[������#w��#.����9�0�x���/"%&Z ���4:�*���"46��@�,5����*��!����)]&�*#6����@3x4.����"46��/"2 @3�N= ��"4:�*������u�����}[,5��,5��*1.^>_ XP���(���>�*�$�",5=./0��,5��4:�ad646�n�*���(������j,a��Z��#.�04.�����c��4 @q�#.� ,5���*���!����a%K��, ��#.���$�����}9�f,a�81 ����26�������4 �J�"��0�46�)�04j��4Y����(���>��{ �N�J�*����x,a����#.�04.��_
`)#.���a=6���*��@3�"!�, !��*�����/01[�J�0,5=./"�"d6���a�*��=.��@b@3������/"�=.,5��4:�a�%�*��.26�J���J�%&�('m����H]<@3������/"�= ���*�-@3x4.��-46����@t�x=.�*��*���A�-,5��,vZ��*15���������*�J����'N�"�#Y�J��,5��=.#.��������� ������2 �J�P�4./015�4.�F�*���}a���AZ
2

Figure 2. Schematic drawing of Mobility and other related software modules, and examples of the types of messages orinformation that pass between them. IMG does Image Acquisition, Cmd processes ground commands, ACM is the ActivityConstraint Manager, ARB arbitrates use of resources, MOBM is the Mobility Manager, NAV does the high level navigationprocessing, Drive executes primitive drive commands, MOT controls all motors, SAPP manages onboard pose estimation,IMU processes IMU data. Hexagons represent Hardware Objects.
�A�������t��491i!��"����4u�����*�0���./"�8^>�-��46@u��46�2.����L�*����/"Z ��0,��$@.����@3Z/0�"4.��������N,5�A�H]K�+������26��N�*���J}3��@3t4.����6/"3��}t�4$�J��,a��=.#.�������;26�J���*���}F/03��}3����#.�"!�#3Z =.��0��*�"�(1N�*���J}3�O%K�� �A�4:��*�/�/0:�=6�W��46@@3���:���A�x@3�*�"�������m'N�"/0/?=.�*�AZ ��,5=3�)/"�'m���m=.�*�"���"�(1��*���}3�M�#6���[email protected].��m#6�8���F�*����/nZ ��0,5�F�*��z:2.�0���,���4:�*���26��#Y���M�",a��!��P���,5=.�*���JZ��"�4 ^>_
`)#6���x�*����@?�O�#6���*�������=./����A���F�04 �#.���6�0!�#:�L�J�%&�('m����v'N#.���*��#6�M���+�����= ���J�*���*4L'm���?4.��W%K�/0/"�'m��@PZO�",a��!�������%K��W�046�J�*��4 �A����A�4:�*���04H�9c,v26��#�@.�����m�c�+��= ���*�J��@H���W,5���*�*��!��������JN�0,a��!�Z�04.!Y�6�"!�#:�t�J�%&�('m����v��,5=./0�19�L�Y�.2B�+��������J���������0�4 ��46@ ���Z/0������c�*��#.��,5���:��46@�=+��04:������-�*L����J�������@v�.2��O���������*�N=6���*���@�+�A�('m����4a��=.=./0�0������0�4 �c]<�26��#a����,5��.�"/0�"�(13^���46@v�#6�c�",a��!��04.!�6�0!�#:�c�J�%&�('m�����_1$M2.�N�#.����L���*�H%K��'|�J26��#l��\3����=3�*�"�46��_
XP4.�H�",5=+���*��4��N���*���t�% �#.�H�6�0!�#:�N�J�%&�('m����F��2.46@3���*�J�*��46@�����*#.�
uplink� �"!�#��m�J�%&�('m����c'N#6�0��#a=6���*����M�A�,�,a��46@.�����4:�
�l�*#.�f�=6���������*��%&�t��46@u@3���J= ���*��#6���L������#u�A�,5,a��4 @i�*j�#6�=6���J�m�%W�*#.�H��%&�(')���*�N�*#6���)�",5=./0��,5��4����)�n��_ h �,5,a��46@.�m����4���"�#6�����+�m��\3���A2.���@v�0,�,5��@3�0�����/"1�26= �4��*�������0=3�N]<�N����/"Z `)�0,5��A�,5,5��46@.��^)��P�(�*��*��@j���F�A�,5,a��4 @j�J��z�26��46�����N�*$�+�t�A\3��Z�A2.���@5����*�0��/"/01�_7Ec/0,5��J����/0/.�A�,5,a��4 @.���J��4:�7�*L����� �*�����������*�$��,t�+��@.@3��@w�04w�#.���J�R������4:�JZ @3�*�"����4[���z:2.��4 �A����V5�i�A�,�Z,a��46@x�04��N���z:2.��4 �A�����;@3���J= ���*��#6��@H�4./01P��%&����W�#6��=.�*���A��@3�04.!�A�,5,5��46@i���,5=./0�A�*����_t`)#.�v%K2.46�>�*�"�46�L����/"/0��@i�91l�#.�a�A�,�Z,a��46@l�13�(�*��, �*#6���c�0,5=./"��,5��4:�F�A�,�,a��46@.�N���*�x���%K���*���@a�*
���command handlers
Z��#.���J�����4 @b,5����*��!����v�u�*#.�i��=.Z=.�*�=.�*������j��%&�(')���*�R����(���A��_|������4:�26��/"/01��m������#b����(���A�$���Z�A���"�9�04.!������,5,a��46@u,5���*�*��!��5,v26�(�v����J=+�46@u� ����}��*j�#6��A�,5,5��46@ �13�(�*��, 'N#.��4 �*#.�o���,5,a��46@ �A�,5=./0�A�*�����H�26�AZ�A����J%K2./0/"1o��t4.����7�l�#.�R4.�A\9�v���,5,a��46@o�04u�#.�Y�J��z:2.��46���'N�0/"/W��\3���A2.���_
Ec4u������*�:�0��' �%��*#.�a�����y�6�0!�#:���J�%&�('m����v�"4u!���4.������/-����4�+�x%K�2.46@Y�04�� � @ � _
3. MOBILITY MANAGER SOFTWARE`)#.�u�j��6�"/0�n�(1 �i��46��!����Y�J�%&�('m����i����(���>�o] � X4$)� Z5�#6�� $ �F�0�-��"/0��4:��^ �0,5=./"��,5��4:�*�-��/0/3�A�,�,a��46@�#6��46@3/0���7%K2.46�A��0�46�%K��l,5��6�"/0�n�(1 ���,5,a��46@6��_ `)#.�0�Y�046�A/026@3���l� ��#|/"�')Z /0������/@3�*�"���v���,5,a��46@.�F�R= ���J%K��, �Y�J=+�����nd+�t@3�*�"�9�04.!f=6��0,5�n�*�"����26��#����c�2.�*43Z �"43Z =./�������� ���N'm��/0/ ���F#.�0!�#3Z /"������/;@3�*�"�9�04.!f�A�,�Z,a��46@6���v@3��0���c�t���=+���A�"d6��@ h �����������45/"3������0�4a�04$�,5��/"/�J���= �N�8�����@3�04.!�#6��#�����@.�)��/0�4.!��#6�L'm�81�_
`)#.�i��23��4.�,5�26�546�8�9�"!:���*�"�4 ��%&�(')���*���Ngx�MG3`7E9�3`x�M�0�f�!���4.���*���x/"�0�.�����*1f��,5=./0�1���@Y�4���������*��/WQ�k7�u����������_7' �P@39���4.��t@3��=+��46@[�4w��491�=6���J�*�0��2./�����#6���*@.'m����������%&�(')���*�5�"43Z����J%<���A���m%K��F����,5�������)��4 @R,5�������_��c���*#.�����.!��0����4Y�a�J������=6���"���%W�",a��!��������"�M2.=O@.������M��4a�04:����*46��/6,a��=a�%?��491t4.�����*�:1#6� #�����@.�x�����4u�04o�#.�a�0,a��!��a= ���0��_$E @3���O���*��4:�L%K2.46�A��0�4u�0�=.�*��9�0@3��@l� h �������J����4l!�:��/?/03�����*�"�4W� ��46@l�*�A%K���*�*�"4.!5�*a�#6�
3

Fault Type Description
Higher level errors - vehicle not necessarily in a dangerous stateARB resource rescinded, may be due to comm passACM ACM said not-OK-to-drivePOT CAL STEERING using a bad potentiometerTOD time-of-day limit reached during commandSTOPPED STOP DRIVING or a shutdown commandWAYPT TIMEOUT GO TO WAYPOINT command timed outNO PATH NAV could not find a safe pathNO PROGRESS insufficient progress, limit cycle or stuckBUSY sequencing error, mobility already runningVISODOM too many Visodom steps failed to converge
Reactive hazard detection - something bad DID happen with the hardwareIMG IMG reported an error grabbing imagesSAPP SAPP error, probably a problem with the IMUMOT MOT reported error other than contact switchIDD IDD unstowed during driveDRIVE TIMEOUT single step during GO TO WAYPOINT timed outCSW motion was stopped due to contact switchTILT excessive or unknown tilt during driveSUSPENSION excessive or unknown susp during driveBAD TABLES drv tables enabled but corruptedNORTH insufficient northerly tilt angle
Table 1. Mobility Manager Fault Types. The topmost faults result in a Goal error, which indicates the vehicle is still safe butfailed to achieve its objective. The lower faults result a in Motion error, i.e., the vehicle has already entered into an unexpected
state and is precluding any further motion pending Earth-based analysis.
#6� #�����@j,a��=;�?����2.�*46�H�f�*�����,5,5��46@3��@i@3�*�0���t=6��0,5�n�*�"���t�*�*��%K��/01i,a��}��5=.�*�!��*���*�P��')����@j�*#.�$!�:��/ _fgx�MG3`7E9�3`p��%&�JZ')���*�t���P= ����H�%��#6�5DPE % ,53@32./0�5'N#.�0��# =.�*��:��@3���F�043%K�����JZ��*26�A�2.�*�L�J����9���A���m�*a� X4$)�w_
' �v���L�*#.�$,5��6�"/0�n�(1u,a��4 ��!������J�%&�('m����5�*#6���v�"4:����J%<���A���L�#6����M� �19�J���, �wgx�MG.` E �3`x����46@I�",5=./0��,5��4:�����#.�l,a���04/0:�=$%K��c��23�*�4.�,��26�M46�8�9�"!:����0�4;_7`)#.���N�A�46��0�J�*�m�%-�J��/"���>�Z�04.!L����,5���*�P=6���0���7%K��, 'N#.����#v�0,a��!����7%K���#6� #����*@v@3�A�*���>�*�"�4'N�0/"/.�+�F����z:2.�0���@?���*��z:2.���J��04.!x�*#.���)�",a��!����-%K�*�, �#.�c�0,a��!�Z�04.!c�J����9���A���O�6�0!�#:�;�J�%&�('m���������46@x=6���*��"4.!m�*#.���0,5��!���@.���*�m�*gx�MG.` E �3` %K��P��46��/013�J����_ ' %�gx�MG.` E �3` �J�����c�$�2 � �A�0��4:�*/"1�*��%K�H=6���*#$��')����@5�*#.�P!����/ �:�#6�P,5��6�"/0�n�(1a,a��46��!����m'N�"/0/O�"43Z�J��0!����*���*#.�a@3��0���v=.�*�",5�"��0�����:1j���46@.�"4.!l�$,5����*��!����R�#6�/0�')Z /0������/;@3�*�0�:�04.!Y�J�%&�('m�����_ �e#.��4i�#.�v,5��4.��26�����P�0�H�A�,�Z=./0�A�*���O�#6�v,5��6�"/0�n�(1l,a��4 ��!����P@3������,5�04.���H�"%��#.��')�81:=+��04:������*������#6��@?� ����J=+�46@.�"4.!i�6����}i�j�*#.�f�A�,5,5��46@w�19�J���, �"%�6_7XF�*#.���*'N�0�������4.��*#.���;�J������N=6���0�;�%3�",a��!����?��� ���z�26���J���@W���4 @��#.�F��13�A/0�t]<�;�*�(�*��=��x�045�#6�P��2.��4 �8�t/0:�= ^7�����*��=+�����*��@?_
`)#.� !���46������/N%K����,5��'m��*}[%K��f�*#.� ��%&�(')���*�j,53@32./0���f�#6����A�,5=.�����P�*#.�L,5��.�0/0�n�(1f��%&�(')���*�H�0�)�0/"/026�J������*��@Y�"4j`7���./0��S3_
`)#.�w���M� �*������*�Y@3 4.��j#6�8���o���,5=.23�*�����Y%<���J�l��4.�26!�#�R=.�*9�����*�c#6� #����*@j�8�����@.��46���L�",a��!����F'N#.�0/"�v�#.�v����#.�0��/"�v�0�@3�*�"�9�04.!YZN�#.��1i'm�2./�@ � �f���4:��04926��/0/01 �@3�*�"�9�04.!l=6���J�x�#.���"�
#.����@3/0�"!�#:�*� �v�"%-�#.��1$�*��0��@Y�*6_MEP��z:2.�0��04.!a��4 @l=.�3�����*�J�04.!5���"4.!�/"�L�0,a��!���=6���0�c,a�81$����}��L2.=9'm���*@Y�% � ,5�04:2.������O�J�����04.!#6� #�����@.�N�5,5�A�*���F�8')�81��31��A�N�*#.���*��������m'M�2./�@R# �8���L@3�*�"����4,5��*�H�#6��4l��"\f,5�A����*�[email protected].��04.!��#6�0�N�0,a��!��H=6�3�A�����04.!6_
G9 �F�046�(�*����@e�#6� �*������*�f���,5���"4 �(������0�4 ���*1 'N#6�"/0�i����}9�04.!��4 @u=.�3�����*�J�04.!l�",a��!����L�i@3������,5�04.�$'N#.����#[@3�0����>��0�4o�*,5�����_ `)#.���7���,������� ��491x�����/"Z �*�",5���*��z:2.�0�*��,5��4:�*�;%K�*�, �#6��0,5��!���=.�*9�����*�J�04.!R=.#6������W��46@j�*#.�5,5��.�0/"�"�(1j,a��46��!����H��46@gx�MG.` E �3`p��%&�(')���*���0�t�2.4u�04[�l/"�')Z =.�*�"���"�(1l�*���J}O�7�J����4.��c�$�/"�' @3�'N4l#.�0!�#l=.�*�"���"�(1a�����}9�F��46@l����26��x�#.��, �*,5�0�*�m�#6���0�F@3����@3/0�"4.����_
4. LOW-LEVEL DRIVING�N�����>�*�"���L#6��#�����@l@3�A�*���>�*�"�4l~R#6��46@3/0�"46!a�#.:�J�t#6��#�����@.�)��43Z�A�2.4:������@a@32.�*�"4.!v����#.�0��/"�P,5���0�4;�:�26��#f������\3�����*�J�0���N�*�������[email protected][��0/"�$Z����z:2.�"�*�����*����/nZ ��0,5�Y�*���=+�46���_ .F��46���j'M�l�0,vZ=./0��,5��4:�*��@i�R�J��=6�������*���+#.�0!�#3Z =.�*�"���"�(1f�����}Y%K��H= ���J%K��,5�04.!�#6�t���A�26����0�4Y,����0�4l=.�*�",5�"��0�����N�"4l�*#.�(H� ' %P� ��%&�(')���*�,53@32./0��_��j����*��!����m�046@3�������*�"46!a'N#.�0��#j@3�*�0�:�04.!5=.�*�",5�"��0���x�*=+���%K��*, ]K��_ ! _"���2.�*4v�045=./����A����������^7����N���4:�-�x�#6�0��,53@32./0���'N#.����#u�#.��4I�A�,5=.23����t�J������*�"4.! ��4.!�/"������46@o�*#.�f��\3= ���>���@492.,t�+���)�%;'N#.����/O������/023�*�"�46���6���J��@$�4fEF��}����*,5��4.4f�J������Z�04.!5�4Y� ���N!���2.46@?_
4

`)#.�Md6���(�7=.#6������%.�#6���*2.�4.Z �043Z =./0���A�m��46@v������@3�*�"�9�04.!F=.�*�0,vZ�"��0�����F�0�F�R�(�*�����P�#6�v�A��46���c'N#.����/��N�*$�#6�v�A�,5=.23���@���4.Z!�/0����_ �e#.��4i�J������*�"46!a�0�P�A�,5=./0�A�*���6�#.��'N#6����/��F����x�*2.�*4.��@?_������#R'N#6����/W�=+����@Y���c�*����/0��@Y�����A��*@3�04.!v�5�*#.��EF��}����*,5��4.4����/0��2./�����0�4 ��Z�'N#.����/0�a�4 �#.�j�23�*��0@.�j�%L��4q�����A�04.!o�2.�*4#6�8���$�l/"�4.!�����=6���*#w/"��4.!��*#o�i���������� ��46@u���*�a���*�����@u���#.�0!�#.���c�J=+����@R�#6��4f�*#.�L�"4 �J��@3�L'N#.����/���_
�e#.�0/"���*#.�5,�����*�H���*�v�+���04.!l���A�26�����@W�?�#.� H� ' %P�|��%&�JZ')���*�v���L��#.����}9�04.!Y%K��H�#6�a4.�,5�046��/-�*���*,��046����0�4u�A�4 @3�n�*�"�4]<��/"/.�J������*�"46!H���7=.�*���*�A�*�0� ��@t��46!�/0��� %K����x�(�*������04.!�Z �46/"1L�A�,�Z,a��46@W�O@.����"�*��@j#6����@.�"4.!Y����#.�0������@Y%K��F�*2.�4i�"4 =./0���A���+��P���/0�����J�v# ��/"%N�#.�Y'N#.����/0�v�*��*�����@u�#.�R=.�*���A�,5=.23���@I��,��2.4:�%K��������5,a��4.��2.�����*��^>_j`)#.�f@.��0���$��%&�(')���*�a�0�v��/��Jj/09�}9�04.!%K��H��+Z 4.�,5�046��/ ����,5�046���*�"�4i�A�46@3�"��0�46��� �046��/"26@.�"4.!Y�A\.�����JZ��"�����[email protected]�*�"/"�����������A2./����*�"�4��%3�*#.�M�*3��}����JZ � �!��0���J26�=+��46��"�4�19�J���,l���9x/"��4.!��*#91L�%+��4����>�*26���*�"�4W����4 @���*#.�������#.�'N4t�04`7���./0�3��_457�046��/0/"1��+�#.�5�J�%&�('m����L���H����A��*@3�04.!$�13�(�*��, �(�����*��04f��4$������81�%K��M�2.�6���z:2.��4:���*�*��46�,����*�J�0�4W���"4 �A/026@3�04.!v�J������Z�04.!H��46@L'N#.����/9,5��*��7= :�J�"��0�4W��,5����-�A26��*��4:������46@�����#.���A/0������"�26@.�����),5�����J2.�*��@R�91a�#6��'(�+0�_
' 46���0@3��4:�*��/0/01��)�#6��H� ' %P� �J�%&�('m����l���a�#6�i�46/"1q�A3@3���4�+�����@Y�# ���P}94.�'c�N�#.��!����,5�A�*�1R�%��#6�t,5��.�0/0�n�(1l�J13�J���,Y_gx�MG.` E �3`[#6���-=6������,5�A�*�����W�*x�"46@.�0������)'N#6���-�(1:=+�����% ,a��Z4.��2.�����*�7�*#.�N����#.�0��/"�N��������=6���6/"�N�%+=+���%K��*,5�"4.! ����4 @t=6���*��,�Z�A�*�������*#6���)@3���>�*����H'N#6���)�A�46�(�*�n�*23����)��#6� #�����@��t�#.�H����#.�"Z�A/0�cZ7=6������,5��������-�*#6���m,5��}��F���4 �J�P������45%K��M��4:��0���/"15@3���+���JZ��4:�x,5��.�0/"�"�(1j=./����%K��*,5��_vG9��/n%&Z �A�/"/0���J�0�4i@.�A����>�*�"�4 @3�4.�v�91�#6�j�"46�J��*2.,5��4:�$���*, ��%&�(')���*�Y��46@I'N#6����/"Z ���,������/�d6/"����*��04ogx�MG.` E �3` �A�46�J��@3���P�'M��=3�JZ �23�H���/"2.,5���F�%��#.��,5��.�0/nZ�"�(1q�13�(�*��,l�)%K��l��",5=./0�0���n�(1q��4 @ �A�46�J�����������J,r]K�"�Y���f�����*��# ���t��491j=6���J�L�%��#6�$���*, �"4:����*����A�*�x������4i�#.�$�'m��=3�L�2.����/"26,����N@32.�*�"46!�,5:�(�N�=+�������*�"�46��^>_
EF�A�26��/)�"4:����J%<���A�04.!��* ,5����5�A�4:��*�/m��/0���>�*��4.�����v�0��@3�46��91$�*#.��,5��*��c�A�4:��*�/W@3���:���A��@.��0�����c�J�%&�('m������.� XH`x_6�j�Z�.�0/"�"�(1��:�046�(�*�26,���4:�����*,Y��#.�0!�#5!����"4a��4:�*��4.46���N= ��"4:�*�"4.! ����46@,a���J�M����,5�����x= ��"4:��04.!���/0/626��N�#6�0�m@3�*�"������%K����*2.4.4.�04.!t,5�Z���*�FZ)�#.��1���/0/ 2 �J���.�*26�J#6��@j,5��*����F'N�"�#oz:26��@3�����*2.�*�t�*��/"Z���*�"���F��46�A3@3���*�M�=+�������*��@a�915�0@.��4:�������/Ok6' ���4:��*�/0/0�������0,vZ=./0��,5��4:�*��@Y�"4;5-kMgxEP��_M`)#.�L� XH` ��%&�(')���*�H�0�N!��"����4l�5�J����%H,5����*�v�*w�2.4;�M��4 @ � !�:��/)=+���n�*�"�4b%K��5������# ,5��*���_5-kMgxEP�v����$=6��!�����,5,5��@u��=.=6��=.������*��/01��-��46@I��/0/�,5��*�����04i�*#.�a�J���x������(��������@ �J�0,t26/n����4.���26�/"1�_t����\9�0,t26, ,���������/"3���n�*�"���m����H�����/0��@R�Jv�#6���N4.�,5�046��/0/"15�*#.��1R��/0/O���,5=./0�A�*��#6���0�N,����0�46�)��",v2./"�*��46���2 �J/01�_�G9#.�2./�@R��4:1a,5����)��\9=+���*�"Z��4 �A�t�5%<��2./"���O�J26��#����c�J�*��/0/;��F������*#.�������.��/0/;,5������N�04j�#6�!��*�26=u����$��23��,a���������/"/01 �#923�v@3�'N4;_Y`)#.�RkA' /09�=u%K����4f�"46@.�"�9��@326��/O,5��*��M�0�M�264R���4� :�.9#F�04$�#6� 5-kMgxEt_3G3�%&�JZ')���*�L,��4.�"�����c=6��!��*���*�L]K=+���n�*�"�4�,5�����2.�*��@l�91Y��46��9@.�������4 @[=+����4:��0�,5�A�*����������2.��*��4:�5@3�*�8' �91u�#6�R,5��*����*^t���&,.-#�_
`)#.���49� :����@I=+���n�*�"�4q�0�f4.�,5�046��/0/"1b���J��0,a�����@ �:1q�A�,�Z�.�04.�04.! �#.�u'N#.����/x,5���0�4 �R,5�����2.���@ �91e��4 �A3@3�����Y'N�n�*##.����@3�04.!v��# ��4.!�����,5�����J26���@5�:1��*#.�P!�19�:���"4$�#.�4'(�+0��:�.23�
�#6�0�M�"46�n�*�0��/+���(�*�",a����P����4$�+�F�0,5=.�*�����@5�91a��=6=./"19�04.!(%P�0�26��/XH@3�,�����*1f��%&�(')���*�F�"%-�*����26�*�����M= ���,5�"� � � � _
5. AUTONOMOUS DRIVINGXP4.�v�%��*#.�v!�������x@3����"!�4i��#6��/"/0��4.!����F�%��*#.���i��� ,5�����0�4')���$,5���A��04.!I�#.� !����/c�*#6���R�#.�u�J13�J���, �#.�26/0@e�+� ���./0��l@3�*�"���t�"�*���/"%
safely�#.�*�26!�# ��T�T$,5��������P�%6%P�"}9�04.! � ��43Z
@3���9' Z /"�0}��$]�% �?Z 'J^)�*���*�*���"4�� @ �N]K,5��J�/01R� ���F'N�"�#i9�������J�0�46��/�� �(�����A/0���H�������*1+�R��x,5��*�v,5�A�*�����*^F�04u�Y��"4.!�/"�5@.�81��W'N�n�*#4.j#.��/"=u%K�*�, �����J�*#o�46�A�a�"�*�t@3��0���a# ���L�+��!�2.4W_R`)#6�0�t���Zz:2.�0���,���4:����@3���>�������@t�91x�*#.�N����"��4��*�nd+��!����/�� �%6�*#.�),5�0�*�J�0�4;�,5����4����#6���m�t��0,�=6/"�N�*��/0���= ���*�����@5,53@3�P�%;@3�*�"�9�04.!�'m�2./�@=.�*��9�0@3�N�046�2 � �A�0��4:�m����=6���.�0/"�"�(1v�04f��/"/ �.23���*#.�F,5:�(�m� ��4.�"!�4���������046��_M`)#.�L=+��*��4:�����/ = :�J�"��0�4l���(�*�",a���*�"�4j���*���N@32.�L�*�/"�0=W���#.�H�"4 ���.�0/"�"�(1v�v����F� ��1��4 @a4.������91v�3��}3����46@5��/"/0�04.!���������04W�6�#.�v/"�0,5�n�*��@�492.,v� ���F�%��A�,5,v2.4.�������*�"�4j�=.=+���2.Z4.�"��0���)��4 @a/"�0,5�n�*��@f�6��46@.'N�0@9�*#f'm�2./�@$��/"/+����(�*����>�M�#.�H����#.�"Z�A/0��{ �N,a��\3�0,t2., ����#6�"���8���./0��@3�0�J�*��46�A�L������#j@.�81��.�a�����19�04.!��,5�2.4:�*��@3��=+��46@.�"4.!o�4I���������04W_u`)#.���*�A%K���a�*#.�j@3�����0��0�4')���P,5��@3���*R�046����*= ��*����L�*#.������=6���.�0/"�"�(1l�%MEF23��4.�,5�2 �P��0�9�"4.!5�4:�+����*@W_
`)#.�Y=.�*��./0��, 'N�"�#I=6��0,5�n�*�"���R@3�*�"�9�04.! ���,5,a��46@6�t���v�#6����#6��1I����4.4.��$��@.��=3�v�*u2.4.�A\3=+���A���@q���46@3�"��0�4 ���M��_ !6_0�M�/"�0=�# ����3����2.�*�H�04u/"9���a�J��"/-��L#.����@3�"46!l��# ��4.!����P�#6����3���A26��4R�J/0�=+����_ �e#6��4R@.��0�9�"4.!v��23�*�4.�,��26�/"1����#6�F�*�������,5��}�����"�*���'N4�@3�����0��"�4���� �23�-�#.�N�+���J��')�81x�x�������#v�n�����"4:�*��46@3��@!�:��/P/"3������0�4W_pEm�R������# �J���= �n�Y������*�J�������$�n���R��n�*26���*�"�4�6���J��@u�4u�#6�f/�������(�v�"43%K��,a����0�4o%K��, �*#.�f��49�:�0�*�4.,5��4:��V�*������7=+���n�*�"�4����(�*�",a�����@v�91�'N#.����/.��46�A3@3���*����'(�+0e��46@<�8��%F���26��/mXH@.�,5�A�*�1��;�*3��}���� ��� �!��0�v�A�43d6!�2.�*����0�4 ,������2.�*��@�91 =+��*��4:��0�,5�����������46@u��46��3@3�������7�*#.�f��/0/0��,5��4��v�%)��0,5��*��,a���04.�04.!F%K����n����@3�*�"��������46@��P=6���@3�0�A��0�45���+�23���*#.�N�J# ��=+��%��"�*�Y��4:�9�0��4.,5��4:�R���,5=.23�*��@q%K�*�, �*���A��4:�Y��4 @ �A2.�*�*��4:�=6���"���-�%?�(�*���*��x�0,5��!�����_-`)#.����N����=6���.�0/0�n�*�"������/0/"�'I�#.�N�*�������l@3�*�"���v�*��%K��/"1��+������4i�04 ���*�����N%K��P'N#.����#��*#.���*���0�H4.R#.�"!�#�*����/023��0�4Y�",a��!����*1$�8�����0/0���./0�P�+�A%K����#6��46@W_
Primary Autonomous Capabilities���M� ����#6�0��/"����=.�*��9�0@3�$�#.�*���$��J�*#.�!��46��/�����=6���6�"/0�n�*�"���L%K����2.��46�,5�26�R@3�*�"�9�04.!6Vu`;��������04 EF�*����*�J,5��4:���ck����# G3��/0���>Z��0�4;�:��46@/%F���J26��/ k-:�J� 0c=O@.�����_�EF/"/+�A�,v�.�046���*�"�46�-�%O�#6����,53@3���M���*�c�8�8���"/����6/"�)�*L�#.�P#92.,a��4a�*�������@.��0�����*�-=./���464.�"46!�*����������>�*�"�9�"��0������` ���./"�YSl46��,5���t��/0/��*#.�R���,t�6�"46����0�46���%�#6����L,�3@3���N��46@l�2.,5,a���*��#����M�#.���"�F26�J��_
' 4Terrain Assessment
]K��Predictive Hazard Detection
^,53@3���O�46����P,����v�(�*���*��$=6���"���c�%��",a��!����P���*��=.�*3�A���*���@�04��*R�$����8�������*���.�0/"�"�(1$��
goodness,a��=W�?��46@j,5���!���@j'N�"�#
��4j��\3�0�J��04.!$,a��=;_PG9=.�0��"�P2 �J���N�#6�t�[email protected]�Z ,5�2.4:�*��@ ��S�Ta@3�AZ!��*���;5-X % .PE�� h EP���a%K��a���������04e���*�J����,5��4:���m�.23�lXP=.Z=+���2.4.�"�(1$26����)=+��04:�*���./"���3,a���J�JZ ,��2.4:���@$U"��@3��!��*���*57X-%DFE % h EF�i�L� ������26�J�v�#6�$�j���*�0@.�0��4.�-���������04i#6���x�����1ld646�!������04.��@��J��"/ �# ���x�0�P4.��x�*����/0�8���./0�t�04��#6�/.PE�� h EP� �0,vZ��!����P����S ����\6S �����*����/023��0�4;_ ' %�= ���# �J��/"���>��0�4i�0�x��/��$��43Z���6/"��@?�c����46@3��@.���*��,5���0�4 =6���*#6�f�����=6� �(���>�*��@q�04:�w�*#.�0�
5

Terrain Path VisualDriving Mode Assessment Selection Odometry Spirit Opportunity
Directed Driving no no no 451 m 9% 1973 m 33%Visodom no no YES 410 m 8% 561 m 9%Blind Goto Waypoint no YES no 2196 m 46% 1911 m 32%Visodom Goto Waypoint no YES YES 379 m 7% 121 m 2%Guarded Motion YES no no 36 m 1% 117 m 1%Guarded Visodom YES no YES 0 m 0% 0 m 0%Autonav YES YES no 1315 m 27% 1262 m 21%Autonav with Visodom YES YES YES 3 m 0% 0 m 0%
4798 m 100% 5947 m 100%
Table 2. MER driving mode usage as of 15 August 2005, counting 573 sols for Spirit and 555 sols for Opportunity. (Distancesare as measured onboard, and can be overestimates of actual distance traveled if wheels slip during non-Visodom drives. Only
rover translation distances are reflected here; turn in place and single-wheel trench digging motions are not reported.)
Figure 3. Illustration of Terrain Assessment and Path Selec-tion. Red cells indicate unsafe areas around the large rock,yellow cells indicate traversable but rougher areas around thesmaller rock, and green cells indicate safe and flat areas.
,a��= ] �J���+5 �0!�26�� � ^>�N��46@e�u'm���0!�#:�*��@ ������/026����0�4q�%x�#6��A�46�J��"�2.��4����A��/0/��L�0�v���*�J�0!�46��@i��������#u=6���*#W_l`)#.�0�t����J26/n����04q�w��A�$�%
Obstacle=6���*#q������/026���*�"�46���c/"�' ����/02.���a�046@3�"Z
������x��/"����M����8�����*�*���6/"�c= ���#;�.#.�0!�#f����/"2.���)�"4 @3�0�����*�H��,5��*�����8�����*�*���6/"�P=6���*#W_
' 4Path Selection
�6�*#.�v�*������c���F!��"����4i��23��4.�,5�2 �F�A�4:��*�/������P�"�*�t@3��0���5@3�0����>�*�"�4 ]<�"4w�A�4:������J�F�
Directed Driving�
�04b'N#.����#I�"�5%K�/0/"�'c���o�J�04.!�/0�Y=.���Z ���,5,a��46@.��@[���*�R=6���*# ^>_` u���/0���A�$��,5�4.!o,t26/n�*�"=./0�j=6���#6�����*#.�j�A2.�*�*��4:���t� � !����/]<��46@ �A2.�*���4:�v�*������ �?^t�0�5�*��=6� �(���>�*��@u%K�*�, 'm��*/�@w%K����,5��04��*j�������P%K�*��,5��� ��46@ ����*���L����a���*��"!�4.��@�����/0/�=+��*�J�0�./0�����46@3��@.���*�5=6���*#6�L�����A���@3�04.!$�*l#.�'y� �+���>��0����/"1i������# =6���*#'m�2./�@u@3��0���5�*#.�$�*������x��')����@i�"�*�t!����/�=+��04���_Y`)#6�$=6���*#�# ���l'M�2./0@q/0����@ @3�0����>�*/"1q�*�'m���*@b�#6� !����/P�0�R!��0����4e�#6�#.�0!�#.���(�����8��/"2 ����0�4;����*#.����=6���#6������)���*��"!�4.��@t/"�������-����/02.��������A��*@3�04.!j�*o�ugx��2 ���0��4I@3���(�*��0�.23�*�"�4W_[`)#.�Y�����*�0��46�A�R�%������#L@3�0�J��*�0�.23��0�4L���;���43d !�2.�����./0����4.�,5�046��/0/01 � _ S)��2.������2.�*�2.4.�"�*�N%K��c����������@"�v@3��!��*�����M%K��c= ��"4:�)�26�46��_
`)#.���������M��/��J)�('mc��+Z 4.�,5�046��/�� ��#6�8�9�"��*�W�8�����"/����./0��VO�6����}:Z2.=6����46@�/0�",5�"���A13�A/0�)�2.�*46��_-gH:��/��7�#6����/"�0�N�046�J��@3�)�*#.�)��0!�#:�JZ���J�)�2.�*4.�04.!a�A�0�*��/"�a] �A��*�*���= �46@3�04.!��*5��4Y���*�P'N�"�# �P,5����������@3�026��^c����4.4.��F� ���*������#6��@l26��"46!R���������O�J$�04��*#.���v��"�26��Z��0�4 �M��4f�����)�# ���M� ����}3���8')�81�%K�*�,p�#6�F!�:��/ �0�m�J��/"���>�*��@$����#6�t=.�*�A%K����*��@l�����x=6���#W_-�e#6��4��6����}9�"4.!a26=��"4l�*#.���F,53@3����#6� �*������R@39���Y� � :HZ �2.�*4��.�c@.��0�9�"4.!b�"4 �n���R��0!�#:����(�j������8')�81�%K�*�,s�#.�P!����/6/03�����*�"�4W_-EF�M�% 5.���.�*26���*1�S�T�T��.��'N#.��4�v�6����}92.=$�+��# �8�:�0��m���M��#.:�J��4a�#6�H#6�"!�#.���J�m= ���#R������/026����0�4���5#6��/0����@?��'N#.����#b�04 =.�*���>�*�0���Y����26����5�o= ��"4:�5�26�4b�u�+�=.�*�A%K����*��@i������x��4o�������*#6���L�6����}3�P26=W_�`)#6���*���2./"�H�%��*#.�0�=.�*3�A���*��"4.!I�0�Y�b��A�Y�%
Waypoint���8��/"2 ����0�4 ���c'N#6�0��# ����
,5���*!���@I'N�"�# �#6� XP�6�(������/"�l=6���# ������/026���*�"�46�a��4 @I�*���2./"��04
Hazard Avoidance����=6���.�0/"�"�(1��O�"%M`;��������04iEP�����*�J,5��4��H�0�
��/�����46���6/"��@?_
`)#.�x�J���A�46@a��+Z 4.�,5�046��/+� ��#6�8�9�"��M@3������>�*�m'N#.��4$�*#.�P�*������%<���0/��W�*F,a��}���=.�*�!������W��%&���� ,v2./n�*�"=6/"�m�(�*��=6��_7`)#6�0� 'N�"/0/9#6��=.Z=+��4o�n%6%P�0�26��/�XH@.�,5�A�*�1j@3������A�*�x�f,t2 ��# �/"�0=��*#6���x/"�"�J�*/"�=.�*�!������L����,a��@3������t�"%c�#.�R=6���*#w�i�#.�R!�:��/����v�./"3��}���@�91Y�9$/����*!��t��4���6�J�*���A/0�t��4 @Y�#.���������N}�����= �c�*�19�04.!$2.43Z�26�������*�(%K2./0/01f�*f@3�*�"�������*�2.46@l�"��_ ' 4j���n�*#.���H�����J���.�#6�
LimitCycle Check
'N�0/0/M@3������A�t�*#.�f�A�46@3�"��0�4[��46@u���"�#.���L����,5�"Z46����Y�#.�����,5,a��46@I��5%K��*���f�*#.�j�������v�o�26�4 �"4q=./��������,5�P��,��2.4:���v!����m��46��'e#.����@3�04.!6�:%K�*�,p'N#.����#f�"�M,5�"!�#:�d646@l���+�A�J�*���c= ���#j����2.46@f�#.�L��6�(������/"��_
' 4Visual Pose Update
]K��Visual Odometry
^>�:�#.�L�*������M26=3Z@.������f�n���f��2.��*��4:�$=+���n�*�"�4 ��46@ �8��R���J�*�n�*26@3� �:1q�A�,5=6���Z�04.! %K�����*2.�*���R%K�2.4 @ �04|�J������I�0,a��!��o=6���"���R�*��}���4 � ��%K��*���4 @i��%&�*�����Y�J,a��/"/-,5��*�"�4 �J���=;_>$m��*# ���M� ����#.���A/0���H26��DFE % h EF�i�m%K��M�#.��� %F���J2 ��/;XH@3�,5����*1l]<�� %F���9@.�,$^�=6��Z�A�����04.!6����"4 �A�R�#.�l�����/0�R��#6��4.!����t�046@32 �A��@I�91w������4I�,5��/"/,5��*�"�46���"4I�#.�Y'N�0@.� 5-X % .FE � h EF� �",a��!����v,a��}��l��2.Z��4.�,5�26�N�*�*����}:�04.!a�%�%K�����*2.�*���F@.� � �A26/n��_H`)#.���P=.�3�����*�J�04.!�46/"1f���49�����!����M�J26���A����J%K2./0/"1$�"%7�#.�H���������04Y#6���)�5�J2 � ���"��4:�492.,t�+���L�%�%K�����26����x�:����"�./0�5�"4u������# ��@��J������4:�L�",a��!��5=6���0����v�*#.��#92.,a��4l�*������)@.��0�����N,t26�J�c��46�2.�*�H�#6���PDFE % h EF������*�5= ��"4:�*��@o��')����@�2 �J��%K2./�%K�����26����L��491:��0,�� %P�0�3@3�, �0�26���@?_
6

Figure 4. Front HAZCAM showing a non-geometric hazardencountered by Opportunity on Sol 446: 50 meters of com-manded driving resulted in only 2 meters progress, which youcan see in the tracks leading up to Purgatory Ripple, in whichOpportunity was mired for over a month. Although this wasa “blind” or Directed drive, Opportunity might have gottenstuck even if GESTALT had been turned on because therewere no geometric hazards to avoid, just loose terrain. For-tunately, Visual Odometry has been used ever since as a SlipCheck to ensure we never command more than 5 meters ofdriving without a guarantee of motion; this new safety checkhelped out on Sol 603, when Visodom measured 44% slipwhile climbing a similar dune, and stopped the drive beforegetting further bogged down. Opportunity was able to backout easily during its next drive.
Terrain Assessment Overview�e#.��4L= ���J%K��,5�04.!c`;��������04LEF�*�J����,5��4:����������#L�����u����#.���A/0����t���6/"�a�*jd646@u!����,�����*�0�5# ��#����*@6�L�"4u�*#.�$4.�����*�91����������04before
�n���������x@.��0�����F�*#.���*��_$XP4./01�!����,5�A�*�����# ��#����*@6�H����%K�2646@ �H4.I���*����*�J,5��4:�a�%x�*#.�i�J�*���6�"/0�n�(1 �%x�*#.�j���������04q�0�=+���%K��*,���@f�49� :����@i]<�����57�0!�2.�*�xUt%K��c��4Y�A\.��,5=./0�x�% 'N#91�# ���a'M�2./�@[�+�j26�J��%K2./&^>_ 5.��5��\3��,5=./"���M�uG:���=q#6��#�����@w�0�@3��d64.��@q������4b����(���A�$/0���!��f��4.�2.!�#I�*u= ����4:�*�0��/"/01I#.�0!�#.Z�A��4:����P�#6������#.���A/0���?���n�*#.���H�4i�#.�&�u���*, ��/0���A��*�4.����� $M8\] � �7$N^;��7�#.�)�*9��}������8�+�!��"���26�= ��46��"�4W_ ���M�I'N#6����/��-���*�S ���A, �04I@3����,5�A�*��������46@I�4w� ���v!���2.46@u�*#.�R�+��/0/01o�%c�#6�� �6$ ���PS�@��A, #.�0!�#W_ h �46�J��@3����04.!5�# ���F�*#.������#.���A/0��,5�"!�#:���0/"�����7,t26��#���� � �P@3��!���������8��46@t��/"/0�'N�04.!c%K��7,5�����2.���,5��4:����*�*����"4 �#6���(�*���*��u@.�����.�M�#.�l=6���*��,�������5@.���*�A�*�"�.�04.!o�#6�,a��\3�0,t2., #.���"!�#:�v�%H�i�J��0/"/"Z �*�*�8����������./0�a��6�J�*���A/0�f')�����J����$S�T��A, %K��N4.�,��046��/;@3�*�"�9�04.!6_
`)#.�)�����[����#6�0��/"����{8#6� #�����@L@3������A��0�4��J�%&�('m�����,53@3��/0� �#6�'m��*/0@�������S !����@?_-`)#.�c�J�!#��F�%+�#.�c!����@5�A��/"/���������#.:�J��4t�*,a������#$�#6�P,5����# ��4.������/"/01:Z @3������,5�04.��@a��6�J�*����/"�H�J�!#����.S�T���,l_������#[�A��/"/m�(�*��*���t�i�A�4:�*�"492.�26�J/01:Z �����19�04.!j�����/����
goodness
Figure 5. Illustration of Goodness Map from Spirit’s Sol107. Red areas indicate obstacles (typically a rock taller than20cm at the center of the red blob), yellow/orange indicatetraversable areas. Only information within a 5-meter radiusis maintained in the onboard map.
����/02.���*#6���x�*��=.�*�����4:�*�F#.�' �*��%K���*#.���������F'm�26/0@j�+���n%��"�*��A��4:����7'm���*��/"3�������@L�4��#6���7�A��/"/ _-`)#.�0� �*���2./n���;�04t�
configu-ration space
'm��*/0@f,a��=W�3�+������26��x�n�c@3�������0� ���N���%K�x����#6�0��/"��A�43d6!�2.�*����0�46����4.��$=.�*���A����Y����(���A�a� �2.46@.����0����_ 5.��a��\9Z��,5=./0�����l/0�4.�YS�T���, �*3��}i����4.��v�*��=.�*�����4:���@ ���t����04.!�/0��J2646���%K� ��!��*��@R����/0/ _A' 4 �(�*����@W�6��/0/;�A��/"/��)�04��v�*������JZ ���#���@$@3���*��A��4:����*��@o������L�*#.�$�*9��} 'N�"/0/��+�f,a���}���@u���L2646���%K�i]<�����0457�"!�2.�*� � �7� ������2 �J�a#6�8�9�04.!l�#6�$�3��}o��4919'N#.���*�52.46@3�����#6��*������m'm�2./�@f�+�L2.46�*��%K� �9�#6���c�0���.��/0/?����#.���A/0�x���43d !�2.�����*�"�46�]K/03������0�46�m�04R�*#.�x'M��/�@6^��#6���c�"4 �A/026@3�H�#6���N�3��}
anywhere2.46@.���*4.�����#l�#6�t�*������F,t26�J�F�+�v@3���A/����*��@l2.46�*��%K��_957�"4 @3�"46!�u���%K�j=6���*#I�*[@3�*�"���Y���5�*#:2 �5���@326�A��@b�od646@3�04.!w�4./"1b��AZ �A��/"/"Z 'N�0@3�H=6���#Y�#.�*�26!�#R�#.�L!�:3@346���*�),5��=W_
Ec/"�#6�2.!�# �#6�o��%&�(')���*� �2.=.=+���*�R��*�"��4:�*���*�"�43Z @3��=+��46@.��4:�!�93@34.����5�������*�J,5��4�����'N#.����# ,��0!�#:�a,a��}��Y�"�a= :���0�./"�Y�*46�8�9�0!����*��!���=6�W46����*�'m���O�# ��4��"�*� �J�/0���;=6��4.��/������#6�M=.�*3�A����JZ�04.!L������#.����@v���z:2.�"�*��@t�v�J2.=6= ��J���"�P]<�L���= ��������)!�:3@346���*�,a��=o%K��L������#o��*�"��4:�*���*�"�4 ^F'M�2./0@o#6�8�����/0�'M��@ @3�'N4 �#6���2.��46�,5�26��@3�*�"�9�04.!��*o��4I2.46�������46���./"�f�*�����_ ' 46�J�����@?����������04i�������*�J,5��4��H�0�x=+���%K��*,5�"46!f�91j,59@.��/0�"4.!Y�*#.�v�*�������91l�n���F�*2.�*4.�"46!R�A�0���A/0�v���H�RS._ �$,�������x@.�0��,�������H@3���*��_x`)#.�0�@3���J�0!�4j��/���!��"�����)26�F�526�J��%K2./;�049�����*�0��4���V
the autonomy sys-tem will only drive the rover into areas where it can safelyturn in place.
XP2.����46��/013�J���;�% �*#.�m���������04v���,5���7%K�*�, /03����/3=./0��4.�md.�J�*�"46!�%M�#.�$�J�������Z �A�,�=623���@�����4.!���@.���*�6_5`)#6���*�������{ �H���*�J����JZ,5��4:�;�%��*#.�����������04H�0�?� �����@H�4x#.�'o,t26��#x������#x�������Z ��!#���@=6���*��#i�%�!��*�2646@i@3���O�����F%K�*�, �f� ���H=./���46��_t` Y��46��/01 #����!��0����4$�*������Z �J�!#���@v= ���*��#f�%?���������04W�9��/0/ � � �j= ��"4:����%<��/"/0�"46!'N�"�#.�04j�# ���P= ���*��#�����xd6�F�Y�a=./���4.��_c`)#.��=6���*��,5�A����*�c�%
7

�# ����=./���4.�md.�m���*�M26���@v�*����*�J����7#.�' ���%K�M�*#.�N�*������-'m�2./�@�+���"%M�"�L'M����v�#6���*���?�04o��4:1j���0��4:������0�4;_tE �A�4:�*�"492.�26�J/01:Z�����*19�"4.!
goodness���L�"4 @3��=+��46@.��4:�/01o���,5=.23�*��@o�04w������#o�%
��������*��/�d /n�*������V;�#.�cG:�*��=W�:`)�"/"���:��46@v�N�2.!�#.4.���� d6/"����*��_7`)#6�d646��/�������/026����0�4i�%m�Y�A��/"/ { �x!�[email protected].���*�H�0�H�*#.�5,�:�(�����46����Z�����*�"���N�4.�N%K�2.46@5�91v��491t�%O�*#.����Nd6/"����*����@3�������0�+��@�� ��/"�'L_
Dce` ���*�*���"4|EF�*�J����,5��4:�j����4 � �[@.�4.�o2.4./0���*�l!����,5�A�*�����043%K��*,a����0�4[��� �23�t�*#.�$�*���*�*���"4w# �����+����4I,5�����J26���@?_ XP4���M�L�.�(�*���*��a����,5�������m=.�*��:��@3�P�#.���J�L,5�����2.���,5��4:�*��_
Robust Stereo Image Processing���M�e���������-26��c=6���*��"���F�(�*���*����0,a��!��c=.�*9�����*�J�04.!x�*t,5����Z�2.��N!����,�����*�0�)�043%K��,a���*�"�4a���+�23��46�����*�91L���������04W_�G:�������9�0��0�4q�0�f��4 ���������A��0���Y�����#.4.�/0�!�1w%K��f=./0��4.�A�����*1I��\9=6/"�Z������0�4l�+������26��L�n�P#6���F/"�'|= �'m���N�*��z:2.�0�*��,5��4:�*�F��46@l4.�,�Z�046��/0/"1|�*��z:2.�0����l4. ,5��9�"4.!e= ����*��_ Q:k6��{ �i�(�*���*��e�9�0��0�4��%&�(')���*��# �����l/0�4.!j#6�0�J���1 � � � � � � S � � � ���= ���A����/0/"1 �"4w�*����/�*��+����� �J13�J���,a�e] �������o�������o����J��������# � � � � �+� S�S�� �;� SB��� �Em�#6��46� � � � �*0F4.,a��4.46��@ gH��2.46@ %���#.���A/0��� � ��U�� �Hk��"�4.�������� ��� �B0c�*�.�0� � ����� �.��46@lk-�����A��=3���4� S�� � ��� ,��&^A_
`)#.��G9 �(�2.�*4.�����*������5@3��,��46�J��������@w�*#.�Yd6�*�J�526�J�l�%H��2.Z��4.�,5�26�M�J��������*�����4.!�2./�����0�4f�4R�t=./���4.���*���*15�������4� � � � _$m23�F�*#.��G3��(�26�4.���P�13�(�*��, ���/"�0��@j�4����A��0����=.�*��(���>�*�"�4j�%�Y/�������L�(�*��0=+����� ��4 @ �4./01�%K�2646@u����,5��J�vS�T � � �I= ��"4:�*�%K�*�, ������#l=6���"�c�%��(�*���*��a�0,5��!�����_7' 4��A�4:�*�*���(���6�����|26����=6�����"���Y�J������ �9���J�0�4;���*��/01:�04.!o�4q�J264./"�0!�#:�5�u�0/"/02.,5�046���*��#6�t�*���*�*���"4W_LEF46@i�91l�9�"��26�v�%��#.���"�H%<���(�*���H=.�3�����*�J��v] S�T�+.9#H���,5=6���*��@a�5T._!�P�+.9#P�4YG9 �(�2.�*4.���>^���46@a4.��' ��%&�JZ')���*�������M�I����#.���A/0�����A�,5=.2.��N,a��491�,5��*�)= ��"4:��,5�����J26���Z,5��4:�*��VcXP=.= ��J�*2.4.�"�(1R# ���N,5�����J26���@Y��4��8�����*��!��H�%�U�,6� T�T�T� � �f= ��"4:�*�-�045������#v�% ��@PDPE % h EP� �",a��!��)=6���0�*�-���-�%?�J�/� S�S3�3��4 @YG9=6�"�*�n�c# ���),5�����J2.�*��@Y��4l�8�����*��!��c�% ���3� T�T�T � � �=+��04������04w������#w�%�� ��,"�).FE � h EF� �0,a��!��a=6���0�*�t�����%c�J�/� U9S3_
`)#.�a!���4.���*��/���/0!���*�"�#., �0��@.���*�A�*�"�+��@o�04 � ,�� � �.23�t'm�$�J26,vZ,a���*��#��$�*#.�R���M� �0,5=./"��,5��4:�*����0�4[#.�����_�' ,a��!���������4[�+�����z:2.�"�*��@q2 �J�04.!I��4:1 �%L�*#.� �8�����"/����./0���J����*��I=6���0�*���m�(19=.�nZ����/"/01o�#.�f%K��4:����4 @w������/.FE�� h EF���v�4bG3=.�"�*�"������46@u�#6�DFE % h EF�i�b�4 XP=.=+���264.�n�(1�_ `)#.� ���8' @.����� ��� �����@��� ��T�S�U�\6S � �e����J�/"2.��0�4 ��46@ ��%&�(')���*�AZ @3�'N46�*��,5=./0��@ �*S � ��\6S � �l����J�/"2.��0�4W_ ' ,a��!����t����f�#.��4b�*���A��"d6��@ ]K� _ ��_"�M���Z�*��,5=./0��@6^Y�* ��/0�0,��046����I��4:1|/0��46� @3�0�J���J�*�"�4 26�J�04.!ed6\9��@h E9.9%PXH� ]K����@.�0��/v@3���(�*����0�4 ^��� h E9.-%PXH�F� ]&d+�J#.��1��8^����,5�����b,53@3��/0�?� ��� _ ' ,5��!��������*�o�#.��4 �A��*�*��/������@ �4 ��*����46/"�04.�AZ �91:Z �*����4./"�04.��� ����0�P26��"4.!Y� �8\��$�z:26����v=.�"\9��/7�2.�3Z'N�046@3�'q��46@v�#6�PG92.,p�%WEc� �J�/"23�*�-F���O���*��46���t] G3E H^�,5�A�JZ�*�0��_ G3E9 �*�A���������*�$!���4.�������*��@w������/0/M����46@.�0@.����R�"4:���!����@3���J= ���*�n�*�"���M���m�*#.�H4.�,5�046��/WS � ��\6S � �x����J�/"2.��0�4W_-E|�8����0�A�(1�%��A�46��0�J���46�A1f��#6����}3�)�0�F��=.=./0�0��@R�5�*#.���*���2./n�*�"46!5����*���/0��Z��0�4 �A2.�*�����+��46@j�46/"1Y�#6���v�A26������N�*#6���H�A\3#.�0�.�"�x�f2.4.��z�26�,5�"46�",v2., ���*�t�����A��=3���@����P����/0�0@?_x������#�����/0�0@��"4:���!����P@3���(Z=6����"�(1����x�#.��4u,5��=.=+��@ ��� � = ��"4:��26��04.!Y�#.�$����,5�����,53@3��/ _7`)#6��d64 ��/9����J26/n�-�% �J������F�0,a��!��M=.�*9�����*�J�04.!P�0� �#926���4R�",a��!��H'N#.���P=6�n\3��/?����/"2.���)���*�P���n�*#.��� 0c46}:46�'N4W�3��m�#6�
� /"3������0�4Y�% �#.�x%K�����26��L���N�*#6���c=6�n\3��/ _
Ec/"�#6�2.!�#b�*#.���$��/0!����"�#., # ���a�+����4 2 �J��@ �26���A���*�J%K2./"/01[�04�*�����������# ��A�J�*�"46!����P��������*��/c��46#6��46����,5��4:���R'm���*�i,a��@3���*�0,�=6�������n���F�*��626�(�*4.���*�N%K��P�����*�F�=+�������*�"�46��_9' 4�=6�������A2.Z/������9�����������/ d6/"������m'M����H��@.@.��@f�v�#.�L��/0�*����@.1���\3�0�J��04.!5�J����%2�;�A%&� ���N�0!�#:�7�W�04.�c�% G9�0!�#:�P]�� �-�7XxG6^>��$m/0��W� $m���@3��������46@h 2.�*�����26��L`)#.�*���#.�/�@fd6/n�*�����N@3���*�A�*�0� ��@f�04�� ,�� _
Gamma Correction`;H� ���J�*���-��4.# ��46�����*#.�N@3�A�����0/:�%.���������04
#.��@.@3��4i�91��J# ��@3�'|%K�*�, �#.���*������H��46@�4.������91Y�3��}3���+'m���=6=./"1f!���,5,a�5�A���*���A��0�4$�*��#.�L���8' �0,a��!�����_
Flat FilterEF4:1R�A2.�*���x'N#.:�J�H,5�"4.�0,t26, ���N4.��N2.46�0z:2.�$]<� _ ��_
�#6���*���F�#.�a�*��,5���8��/"26�v'N�"�#either
�n���x4.���0!�#9�+����*^c'N�"/0/�� ��*� �(���A���@?_
Overhang Filterk�2.���/"1 #.���!#��4�����/F%K�����*2.�*���Y����2 �J��=6���3Z
/0��,a�l%K����*����4./0�"4.��Z � �����@|�(�*���*�� =.�3�����*�J�04.!6_ 56��j��\3��,�Z=./0���W�04u�2.�H�*���J��+��@o��49�9�"�*�46,���4:���W@.���}j#.���!#��4:�*��/7=+�'M����J��*�"=6� ��/0�4.!c�c'N#.�n�*��')��/0/���=.= �����*��@H�*N�#.�M�������?/0�"}����= �������=+��04��*�"46!R@3�'N4i���F�*#.������,5��������_PG9�046���t�26�P4.�,5�"46��/7@.��0�:Z�04.!���49�9�0��4.,5��4:�t#6����4.��#.�04.!i# ��4.!��"4.! @3�'N4u%K��, ������Z#.����@?�:'M�cd6/n�*���m�23�)��491��*��4.!��N����/02.�����# ���m��=.=+��������/09�,�6����}l��')����@j�#6���*�������_vEc491�=.�"\3��/�'N#.:�J�5����4.!��t����/02.�5�0���,5�R=+�����A��4:�*��!��R��/":�J���v�*#6��4b�#6���R�+��/0�' �"�5�04b�#.�l�0,vZ��!��v���x��/0�0,��046�����@W_�`)#.�vd6/"����L#6���x=.�*�����4�26��A%K2./��04 �6�"!�#:��9159�������J�0�46��/"/01���/"�0,5�"46����04.!t46����J1��*��4.!��P@.�����L� ��1��46@5�#6�4.�,��046��/ �t,5������P`;��������04REP�����*�J,5��4��c@3���J�*��4 �A��_
Fixed Vehicle Mask`)#6���8S�To@3��!�����fd ��/�@I�%H�9�0��' �%F�*#.�
.FE � h EF� �=3�*�0���m�0�m�J�/����*!��N�*#6���N�J�,5�F=6���J�����%W�#.�H����#.�"Z�A/0�5��=.=+�����H�04o������# �",a��!���_v`)#.����v46����@��l�+����/"�0,5�"4 �����@�+�A%K��*�$�*���*�*���"4w=6�3�A�����04.!�����4[3���A26�����"�v'm�26/0@34;{ �5@3�%K���#6�f�*������x�*i�+�R��%K�*���0@u�%)�"�*�v�'N4[���*, ��t'N#6����/ �7%K��v�"43Z�J�*��4 �A��_o`)#.���f����#.���A/0�f= ����*�L�*#6���a��/0')�819�t��=.=+�����t�04[�#6��*��,5�v=6/0���A���"4 �#.�5�0,a��!��Y]K��_ ! _"�?�*#.�a�(�*�'M��@;' 4t�;�����./0�04.!,5�2.4:�*��@q4.�����$�*#.� ����,5���������m�#.�o�J�/0���a=6��46��/x���+����l�#6��*������.PE�� h EP���*^����*����/"�0,5�"4 �����@ %K��, �A�46��0@3���*����0�4 26�(Z�04.!a��d.\3��@R=.�n\3��/nZ �6�����@R,a���}O_
Moving Vehicle Mask0c43%K��J�*2.46���*��/01��l�*#.� d6\9��@ ����#.���A/0�
,a���}u�0��4.�����4.�2.!�#w�o��/0�0,��046����l��/0/m= ����*�v�%c�*#.�R�*������%K�*�, �#.�/.FE�� h EF�85-X %v_<' 4j=6���J�*�0��2./������.�#6�t'N#.����/��F����4,5����j%K�*����/"1 �*#.��2.!�#6�23�R�#.� d6��/�@ �%��9�"��'L�P�w�#.��1 ���*��A���*��/����*��@l��/0�46!a'N�n�*#l�#.�t����*�����04l��46@j���*�Ld6/"������@l�23�P�%�#6�
range�0,5��!����W�*���#.���H�#6��4 �*#.�a��*�0!��046��/-�0,5��!���_�Epd6/"Z
����F�A�,5=.�����"4.!$�a�'m��=3�P��19/"�046@3�*�0����/W���/02.,5�L����6���A��04.!5�#6�����4.!��P�% ,5��*�"�4R�% �*#.�x�3��}����JZ �+�!��0�P�13�(�*��, ��46@Y�(�*�����*�04.!,5��*��7/"�0,5�n���-�0�7��=.=6/"�0��@��x��/0/:����46!��M@6���*� ����491L=+��04����;/019�"46!�04R�*#6���c���/02.,5�L���*�P��/"�0,5�"46�����@?_
Terrain Assessment`)#.�)�����[����#6�0��/"���;26����*#.�NgH���@9Z �6�����@L�M�(�*�",a���*�"�4��%OG92.�Z%<������`;���8�����*�*���6�"/0�n�(1cEF=.=./0�"��@x�-�;3����/�`;��������04�] gx�MG3`7E9�3`c^�19�J���, %K��H���������04����*�J����,5��4:�/� , � _*' 46�=.�"�*��@��:1 h ���46��!��0��j��/"/0�4W{ �x�j��*=.#.�04u��/0!���*�"�#.,8� S�T�� �A� S�U � �O�*#.�0�L�13�(�*��, 26����
8

� !����,5�A�*����m�"43%K��,a����0�4��L���(�*�",a���*�c#.�' ���%K�)�#.�c�*������'m�2./�@Y� �����c������#l=+��04:�c�"4l�*#.�L'M��/�@?_mXP�*�0!��046��/0/"1$@.��,5�43Z�J��������@e�4 �#.�wEm�*#.��46� �N������f=6�����(19=+�?� � � �F�"�j�0�Y4.�'�+���04.!R������/026���*��@��4j����(�*� ��@i����#.���A/0���F%K��H=+����4:�����/-26��v�04�#6�L2.=+���,5�04.!$�iG��o,5�0�*��"�4Y���)'M��/"/6� S � � _
Ee�A��4:�����/3��@3���H�045�#.�����0,�=6/"��,���4:�*���*�"�45�0�7�*#6���new data al-
ways overrides old data.' 45=6�������A26/0������4.x,a��������#.�'I�*��%K�
��M2.46�*��%K�H�L!��0����4$�A��/0/+#6��@5�+����4R�A�46��0@3�����@?��'N# ������������#6�/�������(�)����4.!��P@.���*���J#.�'c�m�#.�2./�@$�+�P�*��}���4Y���M��*2.��_�`)#.���m�0���2 �J��%K2./O'm�81��5�A�,5= ��46�����F%K��M�('Mv=.���./0��,a��_157�0�*�J���:�#6�����4.!���@.�����F���,5=.23�*��@L%K�� ����(���A�*�;%<��� %K��, �#.�m�*������;�0�7/0���*������A2.�����*���# ��4t46�����*�91P����46!��M@6���*� ���91H������*/0�819�04.!N4.��'I@.�����'m����/"�0,5�"4 ����$��491�,5�0�������/026����0�46�H�*#6����3����2.�*���@��+������26���%��046�����A2.�������"���)�"4��#.������46!���@.���*�._cG9���A�46@?�6������*/0�819�04.!��%4.��'|@.���*�5,a��}����m�*#.���*�������{ �M���.�"/0�"�(1$�a4 �8�:�0!�����x,5��*�x��Z�.26�J�5�w��491w=+���n�*�"�4I���(�*�",a���*�"�4b����*������-��046�A�l�"�a��/"')�813�=.�*�A%K���*�H�*#.�54.��'m���J� � �043%K��*,a���*�"�4 ������L��491j=+����4:�����/0/"1,5�0��*��!����J����*��@f�����/0�"���N@.�����._
`)#.�H���>�*26��/+���*�J����,5��4:�����M���,5=.23�*��@5%K�*�,s�#6�H�J������t@.��������*�9���0�����@ 'N�"�#s������# �������Z ���#���@ =6������# �"4 @3��=+��46@.��4:�/01�_`)#.�v=6������,5�A�*�����c�%��#.��� ���(�Z d6�P=./���4.�����*��%K�2.46@l%K��P������#�*������Z �J�!#���@F=6���*��#W����46@������2 �J��@L�H�A�,�=623����#.�M%K�/0/"�'N�04.! V
Tilt Filter`)#.�M�J2.�%<������4.��,a��/��%.������#x=./0��46���;=6������#L�0�7�A�,vZ
=6�����@t��!:���046�J�;�#6�m,a��\9�0,t26, ��/0/"�'m��@L����#.���A/0�M��0/n��_-k����*��#.���'N�"�#��*�"/"�L� ���('M����4oTf��4 @i��,5�t,5�04.�",v2., ��0/"�L����v!��0����4��=+���%K���>�L!�:3@346���*�P����/"2.�j] S � ��^ �;��0/n���L���+����v�#.�5,a��\3�0,t2.,��/0/0�'M��@f���*�H��6�J�*���A/0���x]K!�:3@346���*�M����/"2.�x�%7T�^ �9�#.:�J�x�04R�+�AZ�('m����4l���*�x'M���"!�#:���@R/0�"4.�����*/"1�_
Roughness Filter`)#6���*�����@326��/ %K�*�, �#6��=6/0��46���Hd.�L�04i�*#.�
@3�0����>�*�"�4R�%;�#6�x�2.�%<�����P4.��,a��/+=6���9��@3���)��4Y������*��/"/+,5����Z�2.��x�%7#.�' ��2.!�#Y��N2.46������4f�*#.�L�*��!��0�4R�0��_
Step FilterXP46�����#6�v=./���4 ���F= ������,5�A�*�����N%K��x�$�*������JZ ���#���@
@3����i���*�l%K�2.46@W�)�#.�local elevation
] @3���(����46���j%K��, ������#�A�46�J��"�2.��4��L�A��/"/ { �P,5����4���/"���8����0�4i�R�#6���H=./���46��^F�0�x�A�,�Z=.23�*��@?_[E d6/"�����2 �J�04.! � �J,a��/"/0���/� �6$MZ �J�!#���@[@3����R�0�v�*2.4������$�*#.� �*������$=6���*��#W�H�A�,5=.2.��04.![�*#.�w@3� �O���*��4 �A�i�%��#6�,5�"4q��4 @w,a��\[/09����/)��/0��������0�46�v'N�n�*#.�04b������#I�,a��/0/"����@3���*�19�"��/0@6�5�#.�i/0���!����J�5�J���=q%K�2.46@ 'N�"�#.�04q�# ���R�,a��/0/"���$@3�0�*��_57�"4 ��/0/"1��O�#.�5/����*!����J�H�26��#i�J���=i%K�2.46@i�"4 �#.��/����*!����H�*������Z���#��t@3����L���F���,5=6�����@Y��!����"46�J�N�#6��,a��\3�",v2., ��/0/"�'m��@Y��.Z�J�*����/"�H�J�!#���_�k����*��#6����'N�"�#Y�J,a��/"/+,a��\$�(�*��=f��!#��P����P!��0����4$�=+���%K���>�N!�:3@346���*�M����/"2.�a] S � ��^ �3�J���= �N���+����P�#.�x,a��\3�0,t2.,���*�N�� �(�����A/0���P]K!�:3@346���*������/02.�c�%;T:^ ���#.:�J�F�"4$�+�A�('m����4$���*�'m���0!�#:���@f/0�"46�����*/01�_
Robust Terrain Assessment—G9����������/�}���1o�0@.�����t#6�8���f!��46�
�04��*5,5��}9�"4.!$gx�mG3` E �3` ,5���x�*��.26�J��_
Layered Goodness Maps
`)#.�xd6��/0@R�%-�9�"��' ��46@Y�*��4.!��H����J�/"2.��0�4f�%�S�����\.S����(.PE�� Zh EF�r�0,a��!����5���*� �(26�J�$�6�����/"1w/����*!��Y��4.�2.!�#I�u!���4.�������*�
�46� �A�,5=./"���� �������Z ���#���@I%K9��=6��04:��_ .F��46���o��/"/H`;��������04EF�*����*�J,5��4:��=+���%K��*,5��@�4.�����-�#.�F��@3!������% �*#.�Nd6��/0@5�%+�9�0��'���
not� �����@��4a�x�A�,�=6/"����c@3��������.2.���*���#.�����x=6��������/.@.�0�*��_
`)#6���f,5����4 �a�# ���R'N#6��4 ��4e��6�J�*����/"�j/0���8�����5�*#.��d ��/�@q�%�9�"��'L�:��/"/ %K23�*2.��P���������04$��4 ��/019�����'m�2./�@�%<���0/6�*�����}��P�n�m�"4:�*�����A�2.4:��_-`)#.�0�)����26������#.�x�A�43d6!�2.�*����0�4$�=6�����P��46��/013�J�����*�.�*����}x@.�'N4 ��=./������"46!c�#6�)����4:����-�%6�*#.�)������� 4.����� �*#.�)��@3!���%;�#.�P�:����"�./0�Pd6��/�@$�%W�:�0��' ,��0!�#:�)�J����, =+���%K���>�*/"1a�*��%K���:�+�AZ����26��F�*#.�x=6��������/ � @6���*��@39���)46��N�"4 �A/026@3�H�#.�x��6�(������/"��_EF�m�L�*���2./"�����04$�����*/"1v�",5=./0��,5��4:������0�4 ���%+�*#.�P��%&�(')���*�)�#6��*������M'M�2./�@f�J�*����N@3��0�9�"46!�����2.46@$��4f�� �(�����A/0���:�*#.��4l�(�*������6����}f@3�0����>�/01$�04:�5�n��_
` H��@.@3�*���*�?�#6�0�����46�����*4W�8'M�m�"4:�*�3@326����@v�c,t26/n�*�nZ �����/0�M�*��=.Z�*�����4:�*����0�4i�%M�*#.�a'm��*/0@?V�� �81����*��@[email protected].���*�L����= ��_ ' 43Z�J�����@f�% =.�*3�A�����"46!��#6���(�*���*���Z @3����0����@5!�93@34.���*�)@3�0����>�/01��'m�fd6���J���*�J#.�*�04.}��j��6�J�*���A/0���v�./0��6�5��4 @[,5���*!��R�#.��, �"4:�*������#u/0�81��������=6���*�����/01�� �#6��4 �J!���'-�R�� �(�����A/0���L%K��, ������#/��81������6����}v�t�#.���"�m��*�"!��"4 ��/ ��!#����9��4 @5d646��/"/01526�J�F�#.�P,5��J��A�46����*�8����0�������*�J����,5��4:�H�%M!�:3@346���*�F%K�2.46@ �"4w��4:1j/��81�������)�2.�)���J��0,a����x�% �*#.�H����*�����04R�*��%K��/01�_�`)#6�H!�[email protected].���*�m,5��=�A�,5=.23���@�%K�*�, �#.�)/�������(���J������H@.���*�H���7d6/n�*���*��@v�"4:�*P,v2./nZ��0=./0�N/0�81������726�J�04.!�@3���*���-�����*19�"4.!H%K�*�,p�>�c����/0/3�*��@3�026�c]K/��81������^ 2.=��*#.��2.!�#v�������Z ��!#���@t@3�0�*���7'N�"�#a�(�P�A��/0/3����@3�026�N]K/��81����T�^A_L`)#.�v46�A�x���O���>�x���c�*Y�#.�*�"4.}j��4:1l��6�(������/"�v�./"��6�P�:1w] �ZF/��81����H492.,v� ���*��^x�A��/"/���_3�W�'s�"46@.�"�9��@326��/M!�93@34.����H����/02.����04j/0�81����cT5�%&�*��4l�*��=.�*�����4:� �J=+��04:� ���� �(�����A/0���c/"�0}��L�046@3�0�9�0@9Z26��/M/����*!��R�3��}3����/"�' ����/02.����%K�2.46@[�4./01o�04I#6�"!�#.����/0�81�������*��=.�*�����4:�(�@.�0�= ���*���@��P��6�J�*����/"����/0�"}��F� ��T��A,s�3��}3�N,5�������8')�815%K��, � ��T���, @3�"�*��#W_
Partial Range Data - Clipping
`)#.��������/��819�"4.!a�%�4.��'s@.�����f����4 ����26��v����/0/0�P�4j�*#.�5��@3!���%M�#.��d6��/0@ �%m�9�"��' �l�+��,5���J������/026���*��@?_>' %m�4./"1��Y�,5��/"/=.�0�������%���4l�� �(�����A/0�L���c�9�0��0�./"���3�#6���*��4.!���@6���*�5�*��=6����J��4��Z�04.!i�"�a'N�"/0/)4.���� �l�A/����*�J�"d6��@[�����i# ��#����*@W_o`)#.�Y=+�����A��4:�Z��!��L�%��� �(�����A/0�L����4.!���@.�����a�"4l�*#.�v����/0/ ���c�#.�t��@3!����%-�#6�57X-% @.��=6���3��46@a�*#.�H����/0/O�0�M,5�0�J�*��}���46/"1a���8��/"2 �����@$���m�*��%K��_�o�H��@.@3�*���*���#6�0�m�915� ���"4.!�,5��*�P���46����*������0���N�04f�*��=6/0���A�04.!!�93@34.����m����/02.���m���M�*#.�x��@3!��x�%W�*#.�Hd6��/�@f�% �9�0��'L_ ' 46�J�����@�%N��",5=./01�������/��819�"46!f4.��'s����4.!���@6���*�Y�������*19'N#.���*���"4o�#6�,a��=W� ���*�2.46@��#.�a��@3!����H�%��*#.��d6��/�@o�%m�:�0��'s'M�v�*��}����#6�,5��J�c�A�4 �J��������*�"���P�% �*#.���A26��*��4:�c��46@R=.�*���9�0�26�m����/02.����_
Pitchers Mounds
Ec4Y�����/01a�0,�=6/"��,���4:�*���*�"�4R�%;�*#.��G:���= 57�0/n�*���c��",5=./01f�A�,�Z=6�����@t,5����45��/0�������*�"�46��������@��J������4:���A��/0/���_ 57�"��/0@v����(�*�"46!L���Z������/0��@Y�*#6���P�#.���P��=.=.�*�����#R')���F4.��x�A�4 �J��������*�"���L��4.�2.!�#;��+������26����*#.�)=.�����(1:=+�m�������;#6�"!�#3Z ����4:������@L�4��F=919����,5�0@3Z�#6��=+��@��� �(�����A/0��_-`)#.�N4.��\9���",5=./0��,5��4:������0�45��\:�*��46@.��@��#6����������#5%K��)�J���=Y@3���+�����46�A�����*v��4919'N#.����P'N�n�*#.�"4f�#.�H�*������Z���#���@i] S3_ �t,5������N@3����,5������>^�=6������#W_1$M2.�M�*#.�0�)')����%K�2646@a�*�*���2./n�N�04f�*9�Z �A�4 �J��������*�"���F���*����*�J,5��4:���M�%W� ��� �8#6�"/0/O�����46��"Z��0�4 ���W������4 �4 /0�' �J=6�n����#.����{ �x,5�2.46@B�Y#.�0/"/���_��N���(�*����>�*�"46!������4��*�"�4u�j�*#.�R�,a��/0/"��� � �7$�Z ���#���@u@3����$�J��0/0/M=.�*������*�����
9

����#.���A/0�)�*��%K���(1�����491:�#6�"4.!H�*#6�������46�J��"�23�*�����H#6� #�����@t%K��-�#6���/�����=6��4.��/���'N�0/"/6�J��0/0/6�+�c@3�A�*���>�*��@?_1$m23��46�'I�*#.�N������������4�A/0�0,t�l=.�"�*��#.����{ �),5�2.46@6�N��!����"4;_
Tall Thin Obstacles
E �*��/"/ ���*#.�04���6�J�*����/"�)'N�0/"/64.���3����2.=91���4.�2.!�#��%?�H!��*�0@��A��/"/�j,a��}��a�l,5����46�"4.!�%K2./���#6��4.!����*R�*#.�$,5����4u��/0�������*�"�4o����# �����A��/"/ _ $m23���"���(�*�"/0/3,t2 �(���+�c�8�����@3��@?_ .F�8�9�04.!P%K�2.46@v�*#.�0�=.�*��./0��, @32.�*�04.!Ld6��/0@5�*���J��04.!6���#6�HG:�*��=ad6/"�����')����2.=+@6�����@�F4.��<�(26�(� �#.�M,5����4L��/"��������0�4L'N�"�#6�"4t�F�A��/0/ ���623�;�*#.��,5����4=./026�c��,5�x492.,t�+���N�%-�J�*��46@.����@f@.���9�0����0�46��_
Autonomous Goal Selection���M� ����#.���A/0���H���*�t4.�,��046��/"/01��A�,�,a��46@3��@���')����@j�f=6���Z�A������3,5�A�*�������/"/01$�J=+�����nd ��@R!����/O�"4Y��������%K�*��,��a]<��_ !6_0����,5�AZ����*��%K��*'m���*@6^7������ �t� �|�A9��*@3�046������-�04$'m��*/0@v%K����,5��]K��_ ! _"�SY,5�A�*������4.��J�*#u��46@ ��_!�a,5�A�*�����L�����(�t�%M�*#.�R��2.�*���4��vG3�n�*�5.����,5�Y��*�"!��"4+^>_w`)#.���*�Y�0�5��,5�R��,��2.4:���%P��2.��46�,t1u�04@3���A��@3�"46!�'N#6��4Y�a�J���=w]<��_ !6_0�.�v����@.�0��/O��/0������4 �A�H�"4Y,5�A����*����*�2646@i������# �t� � !�:��/ �W26����%M�*#.�a�49�+����*@'(�+0 @32.�*�04.!�26�46�$�"4e=./������l�[@3������,5�04.��'N#.��4b�*#.�i@3���J�0�*��@ #.����@3�04.!#6���P�+����4 �*������#.��@ ^>�?�.23��,5:�(�L�A�,�,a��46@.�x�*��z:2.�0��v#:26,5��4@3�*�"�������7��@3���A��@3�N�04$��@3����4 �A�)'N#.���*�)�#6�c�������-4.����@.�-�*L!� _
���M� ����#.�0��/"��� ��/0� =.�*��9�0@.�y� /0�",5�"���@ ,5����46� �%b��2.Z��4.�,5�26�)!�:��/W���/0���>�*�"�4l26�J�04.!5�*#.�t` 0F�FD `FX E �cX h :�A�,5,5��46@?_ 0F4./"�0}��u�*#.�[Ec2.��4 �8� @3�*�"�9�04.!q,�3@3���j'N#.����#%K����A�P�#6�H�*��������*5@.��0���x���*�2.4 @$�� �(�����A/0�������#.���N�A�,�,a��46@����26����t�#.�Y����#.�0��/"�f� �2.�*4
toward�#.�Y4.��������(����6�J�*���A/0��_
`)#.���W=.�*��9�0@.���?�N,5����46�?�%3����*����"46!��*�'m���*@P�c�N�*���*!����W������4�"%6�#6�N������� �/0�"=6����/"�4.!P�#.�)')�81�_ .F�'M�����������#6���*�m���-4.H'm�81�j��46�2.����*#6�����*#.�����A�,�,a��46@o'N�"/0/�/09��} �"4:�*���491�=6���J�*�0�AZ2./����P�3��}O� ��/n�*#.�2.!�#��$'m��@3!��L�%�1:�8'|����/"2.���c,a�81Y� �v26�J��@�a���46�J������04$�*#.�L���*�����%;�*���*�*���"4f�#6���)'N�0/0/?� ��������*��#.��@?_ ' �'N�0/"/)�J�0,5=./01 d 46@u�#6�R�4.�$4.�����*���J���#.�R������� ���n�v�2.�*46�t��Z')����@
a�*3��}+�M4.��
the�*3��}+_ XP� �(�����A/0���a����Y%K�2.46@ 26��"4.!
�A���J�����04w@.�������A�,�=623���@w@32.�*�"4.!l�*#.�$�4:�+����*@ �*�*�8����������.�"/"Z�"�(1o��46��/013�J����V��#.�$!�[email protected].���*�L,a��=w��4 @w��4 �J��/"��������0�4o,a��\�A�2.4:� �x,a��=;_7`)#.����/���������,a��=$�J���*�����#.�c492.,v� �����%O�*�",5����P!��0����4v�A��/0/9'm���W%K�2.46@��H#6�8�����#.�)#.�0!�#.���(�-,5����4���/0�������*�"�4�04l��/"/?�*������JZ ���#���@a=6���*��#.���m�#6���F�A�4������04R�"��_
XP�*�"!��"46��/"/01���4:�9�����!���@t�����x,�����46�-�%W�A�,5=+��46�*���*�"46!P%K����/"�0='N#.��4 ��=.=.�*�����#.�04.!e�A����*���"4|�����*!��A�����x�*#.���i�A�,5,5��46@ #6��������4q/0�n��/0�j26��j�4q����� ��*#.���5�*#6��4e@326��04.!u��4.!��"46�����*�04.!����(����_R`)#.�$�����p=+���n�*�"�4u���J��0,5����0�4w�19�J���, ]<�"46��/"2 @3�"46!%F���26��/;XH@3�,�����*1.^�#6���m= ���J%K��,5��@R�J�'m��/0/[email protected].��04.!v�#.�x=.�*�"Z,a���*1I��4 @q�A\9���46@3��@ ,5�����"�46�5�*#6���$�"�f')�����(19=.������/0/01I4.��4.���A���*�*���*1x�L�*��/01t�4v�#6�0�M����= ���.�0/"�"�(1L%K������Z =+��04:��04.!6_7������4'N#.��4t�"�7,5�0!�#:�7# �8�����+����4t26��A%K26/ ����#.���7���46���@3�������*�"�46�;@3���>Z�*�����@f�*#6���c=6����A���J�x=.�*�AZ =./���4.4.��@$,5��*�"�46�N�+�L26���@R�"46�J�����@?���_ !6_0�3'N#.��4l�v%K�����26���{ �m�*�=+�/0�!�1f'm���M46��c�*��=.�*�����4:�*���./0�H�����4i��6�J�*���A/0�L�f�#.���49�+�����@j��%&�(')���*���.�*#.�t2646�A���J�����04��(1l�04#.�'e,v26��#a��0,5�H��46@$=+�'m����'m�26/0@a�+�H4.����@3��@$�v���,5=./0�A�*��#6��@3�*�0����,a��@.�t=./���4.46�"4.!R,5��*�v@3� � �A2./"���W�R�A����*���"4j���0��4.Z�*����0�4�')���F4.����@3��@j�f�=3��0,5��#��v���,5,t2.46�0������0�4;� ��c�#6���*�
')���x�Y4.����@��*Y}�����=i�*#.�&' 46�(�*�26,���4:��P��=6/"�19,5��4:�(F���9�0���] ' 4v�6��N�*������m���,$^M'm��*}a���/02.,5�H%K����L�%7��6�J�*���A/0����_
6. DEPLOYMENT RESULTS$m��*# ����� ����#.���A/0���i#6�8���w/����J���@|%<��� � ��1��4 @ �#.���"�o@3�AZ��"!�4[/"�"%K�A�*�",5�Y�% @�T�@.�813���M�j%<������������#[#6���v�*2.4w%K���,5��*��# ��4;����T�@6�819�c�4Y�#.�v�J2.�%<�����x�%��������N�04Y!����/"�!�������/0/01$@3�nZ�����*������*������_Nk���= ���*�c@.���*�A�*�"�.�04.!RG3=.�"�*�"��{ �P@3�*�0���L�*�'m���*@R�#6�h �/02.,v�.�0� .c�0/"/�� � ��T � �PXP=.= ��J�*2.4.�"�(1O{ �R�A\3=./0������*�"�4e�%t��4.Z@32.����4 �A� h ��������t��4 @ �"�*�t,t2./"��"Z }:�0/0�,5�A�*���L�*���}o��23�*#9'm���*@� U�� �:!���4.���*��/3�����@.����?�m�A�4 �J��@3���*��@5�04R��#6::�J�04.!L�+�A�('m����4$�#6������*�"�26�5@3�*�"�9�04.! ,53@3��� � ��� �M��46@ � �13�(�*��,a�(Z /0������/)�:�0��' �%�#6�c�49�+�����@5��23�*�4.�,t1 � �8S�� @3�������0�+�)�#.�H�J13�J���,l{ ��=+���%K��Z,a��46���x�"4j@3���*���0/ _
XP4.�)�% �#.�N���M�b��%&�(')���*�M@.����"!�4t=.�*�"4 �A�0=./"���-'m��� �x�",5=./0�AZ,5��4:�)�4./01a'N#6���)')���M4.�������*����1v%K��M�#.�H,5�0�*��"�4 �9�#.�H,5��*�=6���*��,�������*�Y��46@|�A�46@3�"��0�46��/0���P�#.�u,5��*�w�A3@3�o�.�*��46��#.���'m�2./�@l4.����@l�R� �t����(�*��@?_4.c�'m���������62.46�A���J�����04:�(1R�04�'N#6������������04I'm�26/0@I� �j��46�A�2.4:����*��@I4.�������*�J�"�*�����@I}�����=6�"4.! �#6��49�+����*@ `;��������04 EP�����*�J,5��4�����%&�(')���*���6��\3�"�./0��V %K��j�"43Z�J�*��4 �A���M�#6� 56���.�*26���1bS�T�T"�j�����*��0�4I�%x��%&�(')���*�Y#6���aS�@:S�2.�J%<���A�l46�8�9�0!����*�"�43Z �J=+�����nd �f=6������,5���������_ `)#.���5�6��\3�"�.�0/0�n�(1=.�*�����@$�A�*26�A����/O%K��N�J26���A����J%K2./?�=+�������*�"�4f�4Y�����*��_ 5.��N��\9Z��,5=./0���)�04 �#.�����0!��046��/)@.����"!�4q�J�������.FE�� h EF� �0,5��!����'m���*�j=.�3�����*�J��@ ���+��S ,�\=��S ,i=.�"\3��/P����J�/"23�*�"�4W_ `)#6�0�f'm����2 � �A�0��4:�R%K��l!�93@e����J26/n���R�04 �2.�l�"4 @39��R����J��+��@ ��49�9�"Z�*�4.,5��4:��_A.c�'m���������.�M����#3Z �6���J��@$�2.�*@39��)d ��/�@f�*���J�*�c�2.!�Z!����(�*��@$�#6���cS�����\.S����x�*����/023��0�4R����J26/n�*��@$�04Y� ���J����N����J26/n��������*#.�c�23������*��4.!��)�%?�J����*��L=6�3�A�����04.!6��U�~��P,5�A����*��_-`)#.�0��*��,5�$�+��#6�8�9�0���')���t��6����*����@i�04w�#6�f�04.�n�*�0��/M�0,a��!����x%K�*�,G9=.�0�*�n���H��46@ ���R� �*���2./"�jG9=6�"�*�n�j')���R����A�43d6!�26���@q� 26��#.�0!�#.���N����J�/"2.��0�4R�J������6_
Spirit Rover: Gusev Crater
G9=.�0�*�n��/���4 @3��@��4 � Q:��4926���1vS�T�T�UH��� �23�mSH}9�"/0�,5��������-'m���J��%��#.� h �/02.,v�.�0� .c�0/0/0�H�046�J��@3�agH26���� h �����*����_*0F4./0�"}��$XP=.Z=+���2.4.�"�(1��8'N#.����#L2./"��0,a�����/"1P%K�2646@x���9��@3��46����%K�� 'm������ �(26�(�@Y,5�A����*�L%K��, �n���L/���46@3�04.!j��n�*����G9=.�0��"��#6��@i��@.��0���5������� }9�"/0�,5��������)�+�A%K��*�xd646@.�"4.!$���49�9�"4 �A�04.!5���9�0@.��46�����(�������04.!���x�*#.�5�6����v�%��#6� h �/"26,t�.���).F�"/0/���_&.F�8�9�04.!f=.�*�,5���J��@j�*@3��/"�0�����N�4./013��T�Tt,5��������)�%7����8�����*������#6�L#.�"/0/��c�J����,5��@R2.43Z�*������# ���./0�M���7d �*�J��_ $m23�-�#.�N�A�,t�.�046����0�4t�% #92.,a��4v���������04���*����*�J,5��4:�M��46@5�49�+����*@546�8�9�0!�����0�46��/6��23�*�4.�,t1v��46���./"��@G9=.�0�*�n�N�*��*������#f�*#.�L�6���J�x�% �#.�L#6�"/0/0�c�:1RQ�2.46�tS�T�T�U6_
G9=.�0�*�n��{ �a@3�*�0�:�04.! � ��!���4q�����o�264[%K����*#.�l#.�"/0/��j]<�#.�'N4I�04�#6�)@6���0/"1t@.��0���)@3���(����46����� %K�����/�� @�T8~ � ��Tc�"4&57�"!�2.�� �:^>���.23�')��� %K�/0/"�'m��@t�91t�F1������7�% ��\9=6/"��*����0�4��4t�*#.�N�J/0�=+���-�%6�#6�h �/02.,v�.�0�>.c�0/"/��L]<����457�"!�2.��(��^A_1F�*�"�9�04.!t�4$�*#.�H�/0�=+���m/"��@�f4.��' �J�(19/"���N�%�@3�*�0�:�04.! �6'N�"�#i��4j��,5=.#6���J���c�4j26�J�04.! %P�nZ�26��/6XH@3�,�����*1L�J�%&�('m������x@3�A�*���>����46@<�8��7���,5=+��46�*���*��%K��#.�0!�#u�J/0�0=W�;�A�,5,5��46@3��@�26��5�%M��\3=./"���A�"�/01:Z ���z:2.��46�A��@�}�����=.Z�2.�/#��4.�����*o�8�����@w}94.�'N4[�� �(�����A/0��������46@w4.�����/m26�J�����%�#6��/"�')Z /0������/;@3�*�"�9�04.!$�A3@3���f���,5= ��46�*�����%K��N�*��,5= ��*���1
10

Figure 6. Plot of Spirit’s complete drive history per sol through Sol 588; the most driving in one sol was 124 meters on Sol125, the longest contiguous autonomous drive was 78 meters on sol 133. Note that the vertical scale here is stretched comparedto Figure 9. Red indicates blind driving, green indicates autonav (rows 5–8 in Table 2), blue indicates Visodom (rows 2, 4 inTable 2).
Figure 7. Plot of Spirit complete tilt history through Sol 588.
=.�*��./0��,a��]<��_ !6_0�c�u�3��} �(�*26��}I�04 �w'N#.����/ �c@3�*��!�!��"4.!o�46�'N#.����/.�*��A\9�*��46@$@.��0���c,5�����/"�"%K�A�*�",5��^A_�`)#.�F�26�������*���%O�"�*�,5�0�*��"�4j�'M���N,t26��#l�*a�#6�����.26�J�4.����P��46@Y� �A\3�"�6�"/0�n�(1Y4.���46/"1w�%N�#.�l�49�+����*@u,5��6�"/0�n�(1[��%&�(')���*���-�.2.�a��/0�i�%c�#6�#92.,a��4u!��*�2646@��= ���*����0�46�H�*����, 'N#.j}���=3���A�*�����*�"46!Y46��'��4 @f�+�A�����F'm�813�m�a@3�*�0���L���)��\9=6/0���"4.��@f�04�� ��T � _
Opportunity Rover: Meridiani Planum
XP=.=+���2.46�n�(1 /���4 @3��@ �4 S�UqQ���4:2 ���*1eS�T�T�UI�046�J��@3�[�M��!�/0�h ��������������j�����@3����4.�tk�/0��492.,l_ G.�A�0��4:����(���j'm���*� �*#.�*�"/0/"��@'N#.��4R�*#.�xd6���(�c�0,a��!����)�*��������/0��@f� ��@3�3��}$�23�*����=6�N�5,5���*�@5,5�A�*�����m%K��, �#6�������������623�F��46!��04.�����*�)'m���*�x#.��*��"d6��@$�*����l�����1w/0�n��/0� � �043%K��*,a���*�"�4b�*����������*��@w%K��, �#.�Yd6���J��J����*��5�0,a��!�����_
57/"��\3�"�.�0/0�n�(1l�%���%&�(')���*�t@3���J�0!�4j')���F������4�,5��*�t����"�������/;%K��XP=.=+���2.46�n�(1�_ `)#.��d 4.�AZ !������04.��@H=6���J�*�0��/"���W�A������*�"46!M�*#.��,a��Z�(��*�"�(1f�%�����!�/0�L�A��������N'M����x2.46����J�/"�����6/"�L�91R�J������5�",a��!��=.�*3�A���*��"4.!l�%M�*#.�;�AZ �.�"�JZ = ���JZ =.�"\9��/��A�,�=6�������@?��T:S�U�\=��T�S�UU"� @3��!��*��� 57X-% DPE % h EP� �0,a��!�����_ 5.��J�*2.46���*��/01��5�0,vZ��!����m'N�"�#Y,����H�.�"�*�)=+���N=.�"\3��/?'m���*�H����z:2.�0���@fz:2.����}9/"1$��46@=.�*�����@w�����J1u�*o=6�3�A�����_?$m23�$�����*#.�l4.�,5�046��/c��!#��Y26�J��@�91b�49� :����@e��23�*�4.�,t1b��%&�(')���*�[] S�����\.S����u�*z�2 ���*��@ =.�"\:Z
��/���^>�9������4),t�.�"�*�)=+���)=.�"\9��/ 'm���*�F�046�2 � �A�0��4:�)������J�/"���N�#6����0/��"4 ��S�TR@3��!��*���&57X-% .FE�� h EF� �",a��!�����_v`)#6�0�x,5����4:��# ���F�*#.�v��23��4.�,v1R�13�(�*��,l�6�*���J���@���/0,5��J�c��4:��0���/"1Y26��"46!�*�"!��0@3/01:Z ,5�2.4:���@ .PE�� h EP������# ��@o� � �f����A�4.d6!�2.�*��@ �*26��j= ��"4:�����./0�j,a���J�JZ ,��2.4:���@ DPE % h EP����_ 5.��J�*2.46�����/01��'m�a'M����a���6/"�a�+��*#u�j�*���A�43d6!�2.��v�#6�$,5��.�0/"�"�(1 ��%&�(')���*�� �#6����l���46@.�n�*�"�46�5��46@b��/��J 2.=./0�"4.}I4.��'L��,5���R�6�A\3�0�./0���%&�(')���*��_-` ���./"� � �#.�'c�m�J�,5�F�%;�#.�x@3���+�����46�A���M�+�A�('m����4�#6�a����#6�0��/"���F�*#6����=+������0�J�����A�*��*�P�#.�a,5�����0�4W�;��46@ ��#6������# ���F��#6��4.!��x@.���0/01f'N#.��4f�*#.�x���������04R�*��z:2.�0�*����_
Ec/"�#6�2.!�#u�#.�$�*������*��{W@3���J�0!�4u�*��z:2.�0���,���4:�*�L#6��@o� ����4w%K������8�����*��P���N��0/n���N/0���*�m�#6��4�����@3��!�������x]<����x�*#.�L/0���!��H@6���0/"1@3�*�"��� @3���J�*��4 �A���R�04 57�"!�2.���@�^A�xXP=.=+���2.46�n�(1e�= ��4��l,5��*��# ��4i��n\j,5�4:�*#6�c�04 ��46@32.����46���t�A�����*���c'N�"�#i��0/n�
above� �
@3��!��*�������c���R�J#6�'N4 �"4 5 �0!�26�� ��T._ G:������*��!��0���$�#6���R'm���*���@.�=3�*��@f%K��N#.�0!�#Y��0/"�F@3��0�9�"46!5����4Y� �x%K�2.46@Y�04 � U�� �2� ��� _
Software Versions`)#.�����# �8�����+����4��#6����������*��"�46�?�%3�#.�m,5��.�0/"�"�(1H�6�0!�#:� ��%&�JZ')���*�P26���@Y�4Y�����*�N���)�%�XH�>��� ���FS�T�T��3_
`)#.�N�������J�0�4v26�J��@5@32.�*�"4.!H�*#.�)d6���(�6@�TP@.�813�-�%+�= ���*����0�4t�4������#L��������]K�#.�mk��*�",a���*1P���0�*�J�0�4+^O#6��@L��23��4.�,v1H��%&�(')���*�
11

Figure 8. Image of Spirit’s tracks following an obstacle avoidance maneuver on Sol 107.
Parameter Spirit OpportunityAutonav camera pair HAZCAM (front or rear) NAVCAMStereo processing resolution 256 � 256 256 � 256Useful (unmasked) stereo image size 184 � 256 (front) 108 � 216 (rear) 256 � 256Stereo search range 0.3 - 5.0 � 1.2 - 10.0 �
Grid cell resolution 0.2 � 0.2 ��
0.2 � 0.2 ��
Grid size 10 � 10 ��
12 � 12 ��
As needed for daily operationsMax distance between image acquisitions 0.5 – 1.5 � 0.5 – 2 �
Engineering diagnostic verbosity 0 – 4 0 – 4Max allowed Visodom failures 0 – 15 0 – 20Number of Point Turns to enable 0 – 46 0 – 46
Table 3. Some parameter differences between Spirit and Opportunity
�# ���t')���L������*/"1o�A�46�J���������0����_)' �v�*��z:2.�0���@ �#6���t�",a��!��04.!��4 @w���������04[=.�*3�A�����"46!�3���A26�5��%&�����������#I��23��4.�,5�26�J/01:Z�A�,5,5��46@3��@f,5��*�"�4W�6��46@R��/0�a��#.����}���@$%K��c�J���=l��6�(������/"����������*19'N#.���*��'N�"�#.�04t������#��*������JZ �J�!#���@x@3�0�*�H] S3_ ��, @3����,5������>^>_' 4q=.�����>�*�0���l�#.���a,5����4:�a�#6���$�#.�j�*������*��'m���*�l2.46���6/"�l�*��2.��46�,5�26�/01I�A/0�",v�q������$�,a��/0/ �J=6�n����#.����{ �5,5�2.46@B��Z /0�"}��#.�0/"/����3�#.���N3����2.�*���@f��������*��/+��0,����N�4jG9=.�0�*�n��_
' 4fEF=.��0/WS�T�T�U6�:��4.��'e�����*��"�4a�%;��%&�(')���*�c')����26=./"�04.}���@5�*�+��# �����������6�"4.�"������*�"46!$�#6����\:�*��46@.��@��j���*�J�0�4W_H`)#.���F�����Z��"�4L�"46����*= ��*�����@H�����������/��*��626�(�*4.���*�?��4.#6��4 �A��,5��4����W,a��@.��b�#6�u��23��4.�,v1e�J�%&�('m����[email protected].��04.! =.�*�AZ /0��46@3�04.!I�23�*@39��d6��/0@�����J�*�H��4 @��J�,5�t/0���*�J�46�c/0�����4.��@�@32.�*�04.!$�*#.�t=.�*�0,5���1,5�0�*��"�4W_L`)#.�v,5:�(�x@3�*��,a������t��# ��4.!����c�046��/"26@.��@j�*#.�a���.�0/"Z�"�(1u� �}9�"=b`;��������04IEF�*����*�J,5��4:��'N#.��4w�*#.�Y�A\3�0�J��04.!u@.�������/0�*����@.1w��46�2.�*�R�*#6���$��/"/N=6���#6�f���*�Y�*��%K���M��4 @I�*#.�j���.�0/0�n�(1�j��23��4.�,5�2 �J/01l����8�����*��v�,a��/0/�#.�0/"/���_a`)#.���x��4 ���./0��@ �#6�,t2 ��#R/0�4.!����c@3�*�0�����)�����[email protected].��04.!a��/�� @�T8~ � ��Tt�"4;57�0!�2.�*���._
`)#.��46�A\9� ��%&�(')���*��2.=.!�����@.��'m���?,a��@3���04(5.���.�*26���*1HS�T�T����*#.��/"=$�J��*����,�/0�04.�F�A�,5,5��46@3�04.!���4 @a@.��������46��/"13��0�����0,5=.�����=+���n�*�"�4j���J��0,5����0�4l�04�#.�0!�#./01R�/"�= ��@Y���������04W� ��46@Y��46���./0�` ���*�*���"4wEF�*����*�J,5��4:��26��04.!j,5��*�5�#6��4w�4./01��('m�DF�8�:����,�0,5��!�����_ `)#.���Y2.=.!�����@.�i��/��Jb�"4 �A/026@3��@ �#6�id6���J�Y��#6��4.!����
,a��@3�t�f�#.�v/"�')Z /"������/W,5��.�0/"�"�(1j�J�%&�('m����v�J�046�A��S�T�T:S3Vm26���%)/0:�}:Z 2.= �*���./0���H�j!���4.���*��/"�!#��v�#6�$�(�*�����*�04.!j��4.!�/"���x26�J��@�91I=.�*�0,��"��0�������,5,a��46@6���m26����%x/"9�}�Z 2.=b�*���./"���5�w���(�*�nZ,a���*�t�J/0�0=Y� �����@Y�4j�*������)���J�*�n�*26@3���O��4 @f�*#.�t���.�"/0�"�(1$�R��/"Z����4 ������ ���('M����4�'N#.����/9@3����!�!��"46!c��46@x4.�43Z @3�*��!�!��"4.!),53@3����04u�#.�$������4��v�%c�j@3������./"��@w@3�*�"���a,������_ $m�A%K��*�5�#6�0�t���Z/0��������:�*������M@3��0�����*��#6��@$�v�A\3=./0�0���n�*/"1$���,5,a��46@a������#f�J���=�%.� %P�0�3@3�,�Z ��46���./0��@x@3�*�"���-�c��46�J26��-�*#6���W�*#.���*��'m�2./�@x�+��2 � �A�0��4:�N������*/���=$�+�A�('m����4f�0,5��!����H]<4.�,5�046��/0/013��T��v^A_1$M2.�4.�'y�#.�fgH��;�u�81:=+��04:���A�,5,a��4 @ ���2./�@o� �$���43d6!�2.�*��@�5�*���J��*�0�A�m��23��4.�,5�2 �J/01:Z ���,5,a��46@3��@a,5��*�"�46�M�5��46�2.�*��2 � �A�0��4:��������/���=;�����*�J2.,5�04.!x�#6�F���A�26��/.#.����@3�04.!���#6��46!��)�0�4.5/����*!����m�*#6��4l'N#6���)')���N���,5,a��46@.��@?_
E %K�26�J�*#b2.=6!�����@3����=./���4.46��@I%K��a,5�0@3Z S�T�T �6��,5�"!�#:�5�046����Z=+�������v�J����������/O�*����#.46�/0�!��0���c4.�' � ���"4.!f������/026���*��@?_c`)#6�����046�A/026@3�)��23�*�4.�,5�26�;�"4��J�"�2��046�J��*2.,5��4:�-=./0���A��,���4:�;%K�/0/0�')Z�04.!j�R�26�������*�(%K26/�@3��0���l]<��}��YgHj��4 @i` �26��# ^A�W!�/0�� ��/-=6���*#=./���4.46�"4.!x�*L��46���./0�m�04:���/"/0�"!���4:���6����}��*�*����}9�"4.! ���9�0�26��/.����*���Z�04.!6�9��46@a��23��4.�,5�26��@3������A��0�4$�%W@326�J�m@3���:�0/�����4 @$�A/0�26@6��04 �49� :����@[�0,5��!����1�_eXF�*#.���a=./���464.��@ ��46#6��46����,5��4:���5�"43Z�A/026@3�L��\3=./"���A�"�N}�����=+�23� #��4.�����.�= ����@Y�=3�*�",5�!#�����0�46�m�*/%P�nZ�9@.�, ��46@eEF23��46�8�O�)��46@e4.��' �A�,5,a��4 @.�$�04:���4 @3��@ �*�*��@326���H�#.�����,5=./0�A\3�n�(1f�%��A�,5,a��4 @3��@Y�J��z:2.��46������_
12

7. CONCLUSION`)#.�i�i��� �j��.�0/"�"�(1qG3�%&�(')���*�j#6���f��46���./"��@e��4e2.46=.����A��Z@3��4��*��@o��,5�264��L�%m@3�*�"�9�04.!l���A�*��*�F�#.�a�2.�J%<���A���%)��4.��#.���'m��*/0@?_-`)#.�F�6�A\3�0�.�"/0�"�(1v�%W�n���M@3���J�0!�4a��46���6/"��@a�n�M�t%K2.46�>�*�"�4���O���A��0����/"1$�04Y�('Ma@3����,a���������/0/01$@3� �O���*��4:�N�*���*�*���"46��_
8. ACKNOWLEDGEMENTS`)#.���*��������*��#j@3�������0�+��@l�04l�#.���F= ��=+���F')���F�����*�*�"��@R�23�P����#6�oQ��A�jk��*�=.26/0��"�4 �;��� ��*�����*1�� h ��/"�"%K��*4.����' 46�J��"�23�*�u�%` ����#.4.�/"�!�1���2.46@3���$�u�A�4:�*�*���>�a'N�n�*# �#.�jDF����0�46��/cEc����Z46��23���������46@bG9=6�����REP@3,5�"4.���J�������0�4;_ `)#.�26���46@.�t�%c=+���Z=./0�x'M����P�"49���/"����@a�04R�#.�x,5�0�*��"�4R���cQ:k6� ��46@f�#.�*�26!�#.�23��#6��'m��*/�@?�?�"4u!�������*4.,5��4:���O������@3��,5���.�W��4 @i�046@326�J��*1�_/�o�!������*�A%K2./0/01 ����}94.�'N/0��@3!��i�*#.���0�i�23�*�J�*��46@3�04.!q'M��}O�x'N#.����#��4 ���./0��@o26���j�A\3=./0��*�a�������x�*#.��2.!�#wG9=.�0�*�n�v��46@[XP=.=+��Z�264.�n�(1�_&� �5'm�2./�@i/0�0}��v�Y�#6��4.}j�*#.�a��4:��0�*�������*�x��\9=6/"�Z������0�4Y�N��������*����,Y� ��46@f�"4l=6���J�*�0��2./0���m�#.�x,5��.�0/0�n�(1$'m��*}:Z�04.!F!���2.=t��4 @L����(�7�����,l���046�A/026@3�04.!xk����/0-$m��/0/"2.�J�*�6��F����4 �H���*26���OQ�����56�8�9����J�*6� P�8�9��@+.c��4.���z:2.� #��+�c��+����4�W�0���+�����JZ�6����#W��P�8�9��@ �W�}9�#.�04W� h ���*�/0�"46�t����/�@3�4 ��@3 �:�N����#Rk-����������EF����4iG9�0,� �+�M@.@3�0�v` 2.46�J���/ �=.c264.!3%� �+�N����} � ��/0��#;�+��46@�N��!/�e�0/0/0��4W_
Jeffrey Biesiadecki has been a soft-ware engineer at NASA’s Jet PropulsionLaboratory since 1993, after completinghis Master’s degree in Computer Scienceat the University of Illinois, Urbana-Champaign. He designed and imple-mented the core motor control and non-autonomous mobility flight software for
the Mars Exploration Rovers, and is also one of the roverdrivers for the Mars Exploration Rover ”Opportunity”, re-sponsible for command sequences that tell the rover where todrive and how to operate its robotic arm on the surface ofMars.
Dr. Mark Maimone is a Navigationand Machine Vision researcher at theJet Propulsion Laboratory. He earnedhis Ph.D. in Computer Science fromthe Computer Science Department ofCarnegie Mellon University in 1996,and was then a Post-doctoral ResearchAssociate at Carnegie Mellon’s Robotics
Institute. Since starting at JPL in 1997, he has worked onthe several Mars Rover research projects and a vision systemfor inspection of the Chornobyl reactor. As a member of the2003 Mars Exploration Rover flight software team, Mark de-veloped the vision and navigation subsystems for the MER ve-hicles. Mark is now part of the MER ground operations teamand is developing the autonomous navigation software for theMars Science Laboratory rover, NASA’s next Mars rover mis-sion.
REFERENCES
[1] Khaled S. Ali, C Anthony Vanelli, Jeffery J. Biesi-adecki, Mark W. Maimone, Yang Cheng, Miguel SanMartin, and James W. Alexander. Attitude and posi-tion esimation on the Mars Exploration Rovers. In IEEEConference on Systems, Man and Cybernetics, The BigIsland, Hawaii, USA, October 2005.
[2] P. Bellutta, R. Manduchi, L. Matthies, K. Owens, andA. Rankin. Terrain perception for demo iii. In Proc.Intelligent Vehicles Symposium, Dearborn, MI, October2000.
[3] Jeffrey Biesiadecki, Mark Maimone, and Jack Mor-rison. The Athena SDM rover: A testbed forMars rover mobility. In International Symposiumon Artificial Intelligence, Robotics, and Automa-tion for Space (i-SAIRAS), Montreal, Canada, June2001. http://robotics.jpl.nasa.gov/people/mwm/sdm-mobility/.
[4] Jeffrey J. Biesiadecki, Eric T. Baumgartner, Robert G.Bonitz, Brian K. Cooper, Frank R. Hartman, P. Christo-pher Leger, Mark W. Maimone, Scott A. Maxwell,Ashitey Trebi-Ollenu, Edward W. Tunstel, and John R.Wright. Mars Exploration Rover surface operations:Driving opportunity at meridiani planum. In IEEE Con-ference on Systems, Man and Cybernetics, The Big Is-land, Hawaii, USA, October 2005.
[5] Jeffrey J. Biesiadecki, Chris Leger, and Mark W. Mai-mone. Tradeoffs between directed and autonomousdriving on the mars exploration rovers. In InternationalSymposium of Robotics Research, San Francisco, CA,USA, October 2005.
[6] Yang Cheng, Mark Maimone, and Larry Matthies. Vi-sual odometry on the Mars Exploration Rovers. In IEEEConference on Systems, Man and Cybernetics, The BigIsland, Hawaii, USA, October 2005.
[7] Donald B. Gennery. Calibration and Orientation ofCameras in Computer Vision, chapter Least-SquaresCamera Calibration Including Lens Distortion and Au-tomatic Editing of Calibration Points, pages 123–136.Springer Verlag (A. Gruen and T. Huang, ed.), 2001.
[8] Steven B. Goldberg, Mark W. Maimone, andLarry Matthies. Stereo vision and rover nav-igation software for planetary exploration. InIEEE Aerospace Conference, volume 5, pages2025–2036, Big Sky, Montana, USA, March 2002.http://robotics.jpl.nasa.gov/people/mwm/visnavsw/.
[9] M. Golombek and D. Rapp. Size-frequency distribu-tions of rocks on Mars and Earth analog sites: Implica-tions for future landed missions. Journal of Geophys-ical Research - Planets, 102(E2):4117–4129, February1997.
[10] Chris Leger, Ashitey Trebi-Ollenu, John Wright, ScottMaxwell, Bob Bonitz, Jeff Biesiadecki, Frank Hartman,
13
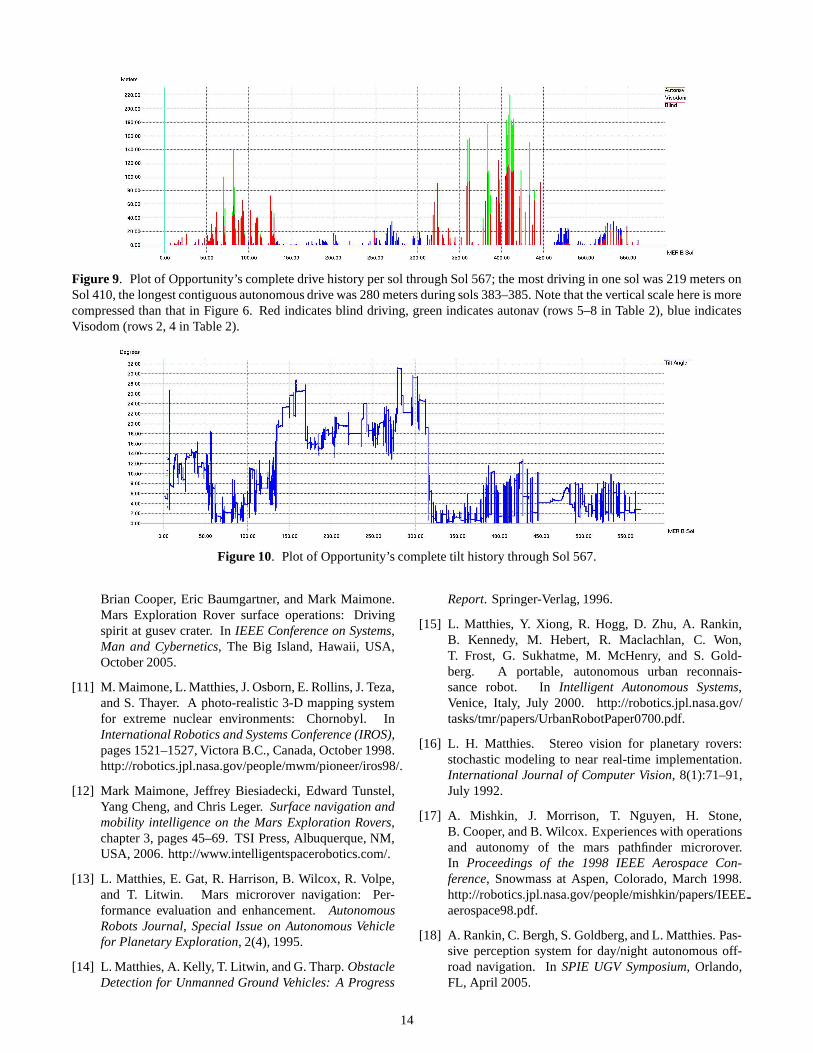
Figure 9. Plot of Opportunity’s complete drive history per sol through Sol 567; the most driving in one sol was 219 meters onSol 410, the longest contiguous autonomous drive was 280 meters during sols 383–385. Note that the vertical scale here is morecompressed than that in Figure 6. Red indicates blind driving, green indicates autonav (rows 5–8 in Table 2), blue indicatesVisodom (rows 2, 4 in Table 2).
Figure 10. Plot of Opportunity’s complete tilt history through Sol 567.
Brian Cooper, Eric Baumgartner, and Mark Maimone.Mars Exploration Rover surface operations: Drivingspirit at gusev crater. In IEEE Conference on Systems,Man and Cybernetics, The Big Island, Hawaii, USA,October 2005.
[11] M. Maimone, L. Matthies, J. Osborn, E. Rollins, J. Teza,and S. Thayer. A photo-realistic 3-D mapping systemfor extreme nuclear environments: Chornobyl. InInternational Robotics and Systems Conference (IROS),pages 1521–1527, Victora B.C., Canada, October 1998.http://robotics.jpl.nasa.gov/people/mwm/pioneer/iros98/.
[12] Mark Maimone, Jeffrey Biesiadecki, Edward Tunstel,Yang Cheng, and Chris Leger. Surface navigation andmobility intelligence on the Mars Exploration Rovers,chapter 3, pages 45–69. TSI Press, Albuquerque, NM,USA, 2006. http://www.intelligentspacerobotics.com/.
[13] L. Matthies, E. Gat, R. Harrison, B. Wilcox, R. Volpe,and T. Litwin. Mars microrover navigation: Per-formance evaluation and enhancement. AutonomousRobots Journal, Special Issue on Autonomous Vehiclefor Planetary Exploration, 2(4), 1995.
[14] L. Matthies, A. Kelly, T. Litwin, and G. Tharp. ObstacleDetection for Unmanned Ground Vehicles: A Progress
Report. Springer-Verlag, 1996.
[15] L. Matthies, Y. Xiong, R. Hogg, D. Zhu, A. Rankin,B. Kennedy, M. Hebert, R. Maclachlan, C. Won,T. Frost, G. Sukhatme, M. McHenry, and S. Gold-berg. A portable, autonomous urban reconnais-sance robot. In Intelligent Autonomous Systems,Venice, Italy, July 2000. http://robotics.jpl.nasa.gov/tasks/tmr/papers/UrbanRobotPaper0700.pdf.
[16] L. H. Matthies. Stereo vision for planetary rovers:stochastic modeling to near real-time implementation.International Journal of Computer Vision, 8(1):71–91,July 1992.
[17] A. Mishkin, J. Morrison, T. Nguyen, H. Stone,B. Cooper, and B. Wilcox. Experiences with operationsand autonomy of the mars pathfinder microrover.In Proceedings of the 1998 IEEE Aerospace Con-ference, Snowmass at Aspen, Colorado, March 1998.http://robotics.jpl.nasa.gov/people/mishkin/papers/IEEEaerospace98.pdf.
[18] A. Rankin, C. Bergh, S. Goldberg, and L. Matthies. Pas-sive perception system for day/night autonomous off-road navigation. In SPIE UGV Symposium, Orlando,FL, April 2005.
14

[19] Glenn E. Reeves and Joseph F. Snyder. An overview ofthe Mars Exploration Rovers flight software. In IEEEConference on Systems, Man and Cybernetics, The BigIsland, Hawaii, USA, October 2005.
[20] Reid Simmons, Lars Henriksen, Lonnie Chrisman, andGreg Whelan. Obstacle avoidance and safeguarding fora lunar rover. In AIAA Forum on Advanced Develop-ments in Space robotics, Madison, WI, August 1996.http://www.cs.cmu.edu/˜reids/papers/AIAAobsAvoid.pdf.
[21] Sanjiv Singh, Kurt Schwehr, Reid Simmons, TreySmith, Anthony Stentz, Vandi Verma, and AlexYahja. Recent progress in local and globaltraversability for planetary rovers. In Interna-tional Conference on Robotics and Automation,2000. http://www.frc.ri.cmu.edu/projects/mars/ publi-cations/global local icra2000.ps.gz.
[22] Richard Volpe. Navigation results from desert fieldtests of the Rocky 7 Mars rover prototype. Interna-tional Journal of Robotics Research, 18(7):669–683,Special Issue on Field and Service Robots, July 1999.http://robotics.jpl.nasa.gov/people/volpe/papers/JnavMay.pdf.
[23] Richard Volpe. Rover functional autonomy develop-ment for the Mars mobile science laboratory. In IEEEAerospace Conference, Big Sky, Montana, March 2003.
[24] David Wettergreen, Deepak Bapna, Mark Maimone,and Geb Thomas. Developing nomad for roboticexploration of the atacama desert. Robotics and Au-tonomous Systems, 26(2–3):127–148, February 1999.http://robotics.jpl.nasa.gov/people/mwm/papers/98ras.nomad.pdf.
[25] Yalin Xiong and Larry Matthies. Error analysisof a real-time stereo system. In Computer Visionand Pattern Recognition, pages 1087–1093, 1997.http://www.cs.cmu.edu/˜yx/ papers/StereoError97.pdf.
15