the european project sfly: swarm of micro flying robots sfly eu fp7, 2009-2011
DESCRIPTION
The European Project sFly: Swarm of Micro Flying Robots www.sfly.org EU FP7, 2009-2011. z. . x. y. Inspector. Personnel operates in high risk environment. Replace by tele-operated aerial inspection vehicle. Micro-UAVs for Rescue and Inspection. - PowerPoint PPT PresentationTRANSCRIPT

The European Project sFly:Swarm of Micro Flying Robots
www.sfly.org
EU FP7, 2009-2011
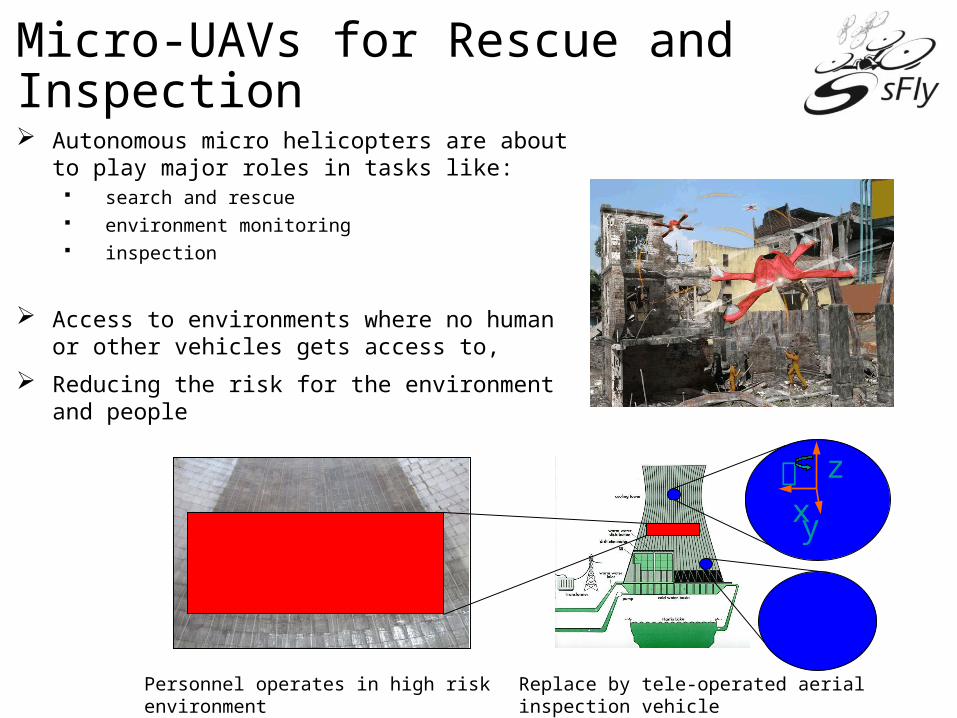
Micro-UAVs for Rescue and Inspection
Autonomous micro helicopters are about to play major roles in tasks like:
search and rescue environment monitoring inspection
Access to environments where no human or other vehicles gets access to,
Reducing the risk for the environment and people
Inspector
xy
z
Personnel operates in high risk environment Replace by tele-operated aerial inspection vehicle

Consortium
Switzerland
ETH Autonomous Systems Lab (leader)
ETH Computer Vision Lab
CSEM: Centre Suisse d'Electronique et de Microtechnique
France
INRIA: French National Research Institute
Greece
Techical University of Crete
Germany
Ascending Technology
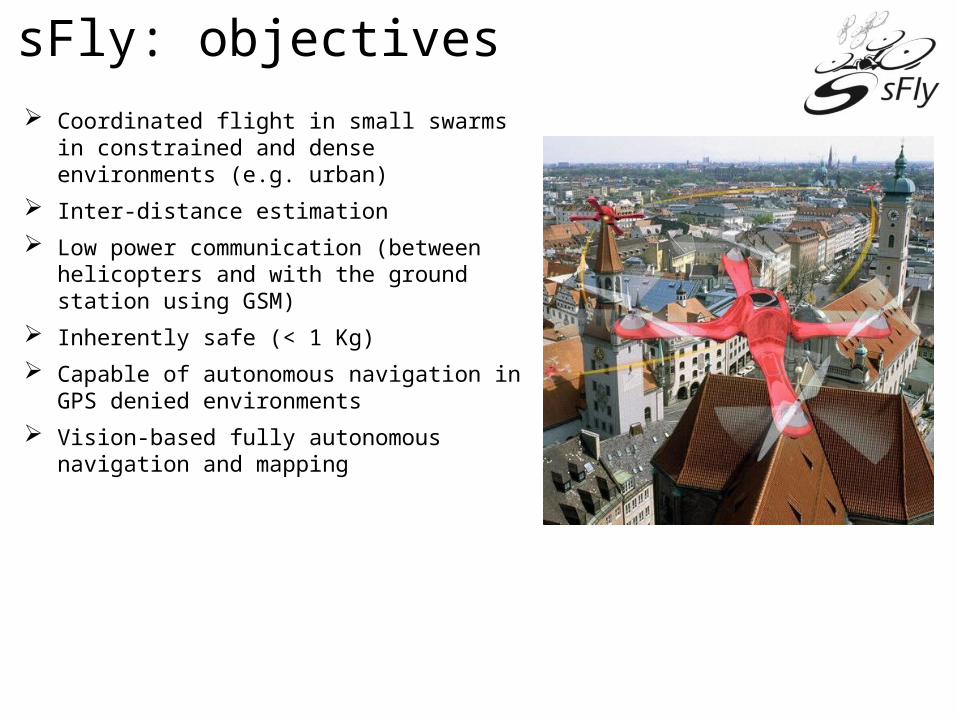
sFly: objectives Coordinated flight in small swarms in
constrained and dense environments (e.g. urban)
Inter-distance estimation
Low power communication (between helicopters and with the ground station using GSM)
Inherently safe (< 1 Kg)
Capable of autonomous navigation in GPS denied environments
Vision-based fully autonomous navigation and mapping

The SystemThe Platform
Hummingbird quadrotor helicopter from Ascending Technologies (www.asctec.de) 50 cm diameter
200 g additional payload
on-board IMU (roll, pitch, yaw)
The camera
190º field-of-view fisheye camera
On-board ProcessingIntel Atom, 1.6 GHz

Evolution of the platform
1st version: Hummingbird
2nd version: Pelican
3rd version: Hexacopter

The Problem:Vision-based motion estimation…
R, T = ?
… and 3D reconstruction
… without GPS. How?

How does it work?
Image 1 Image 2R, T = ?

Outdoor Results
Stable hovering at 15 m height
Large scale reconstruction form aerial images
during autonomous flight

sFly: what’s the next step?
Coordinated flight with multiple helicopters using single cameras only
For more info: www.sfly.orgContact: [email protected]