tenth edition - apl100.wdfiles.comapl100.wdfiles.com/local--files/notes/13_lecture_ppt mod.pdf ·...
TRANSCRIPT

VECTOR MECHANICS FOR ENGINEERS:
DYNAMICS
Tenth Edition
Ferdinand P. Beer
E. Russell Johnston, Jr.
Phillip J. Cornwell
Lecture Notes:
Brian P. Self California Polytechnic State University
CHAPTER
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
13 Kinetics of Particles:
Energy and Momentum
Methods

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Contents
13 - 2
Introduction
Work of a Force
Principle of Work & Energy
Applications of the Principle of
Work & Energy
Power and Efficiency
Sample Problem 13.1
Sample Problem 13.2
Sample Problem 13.3
Sample Problem 13.4
Sample Problem 13.5
Potential Energy
Conservative Forces
Conservation of Energy
Motion Under a Conservative
Central Force
Sample Problem 13.6
Sample Problem 13.7
Sample Problem 13.9
Principle of Impulse and Momentum
Impulsive Motion
Sample Problem 13.10
Sample Problem 13.11
Sample Problem 13.12
Impact
Direct Central Impact
Oblique Central Impact
Problems Involving Energy and
Momentum
Sample Problem 13.14
Sample Problem 13.15
Sample Problems 13.16
Sample Problem 13.17

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Energy and Momentum Methods
2 - 3
The pogo stick allows the boy
to change between kinetic
energy, potential energy from
gravity, and potential energy
in the spring.
Accidents are often analyzed
by using momentum methods.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Introduction
13 - 4
• Previously, problems dealing with the motion of
particles were solved through the fundamental
equation of motion,
• The current chapter introduces two additional
methods of analysis.
.F ma
• Method of work and energy: directly relates force,
mass, velocity and displacement.
• Method of impulse and momentum: directly
relates force, mass, velocity, and time.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Introduction
2 - 5
Forces and
Accelerations
Velocities and
Displacements
Velocities and
Time
Approaches to Kinetics Problems
Newton’s Second
Law (last chapter)
Work-Energy Impulse-
Momentum
2211 TUTGF ma
2
11 2
t
tmv F dt mv

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Work of a Force
13 - 6
• Differential vector is the particle displacement. rd
• Work of the force is
dzFdyFdxF
dsF
rdFdU
zyx
cos
• Work is a scalar quantity, i.e., it has magnitude and
sign but not direction.
force. length • Dimensions of work are Units are
J 1.356lb1ftm 1N 1 J 1 joule

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Work of a Force
13 - 7
• Work of a force during a finite displacement,
2
1
2
1
2
1
2
1
cos
21
A
Azyx
s
st
s
s
A
A
dzFdyFdxF
dsFdsF
rdFU
• Work is represented by the area under the
curve of Ft plotted against s.
• Ft is the force in the direction of the
displacement ds

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 8

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Work of a Force
13 - 9
What is the work of a constant force in
rectilinear motion?
1 2 cosU F x
1 2 sinU F x
1 2U F x
1 2 0U
a)
b)
c)
d)

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Work of a Force
13 - 10
• Work of the force of gravity,
yWyyW
dyWU
dyW
dzFdyFdxFdU
y
y
zyx
12
21
2
1
• Work of the weight is equal to product of
weight W and vertical displacement y.
• In the figure above, when is the work done by the weight positive?
a) Moving from y1 to y2 b) Moving from y2 to y1 c) Never

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Work of a Force
13 - 11
• Magnitude of the force exerted by a spring is
proportional to deflection,
lb/in.or N/mconstant spring k
kxF
• Work of the force exerted by spring,
222
1212
121
2
1
kxkxdxkxU
dxkxdxFdU
x
x
• Work of the force exerted by spring is positive
when x2 < x1, i.e., when the spring is returning to
its undeformed position.
• Work of the force exerted by the spring is equal to
negative of area under curve of F plotted against x,
xFFU 2121
21

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Work of a Force
13 - 12
As the block moves from A0 to A1, is
the work positive or negative?
Positive Negative
As the block moves from A2 to Ao, is
the work positive or negative?
Positive Negative
Displacement is
in the opposite
direction of the
force
Displacement is
in the same
direction of the
force

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Work of a Force
13 - 13
Work of a gravitational force (assume particle M
occupies fixed position O while particle m follows path
shown),
12221
2
2
1r
MmG
r
MmGdr
r
MmGU
drr
MmGFdrdU
r
r

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 14
Does the normal force do work as the
block slides from B to A?
YES NO
Does the weight do work as
the block slides from B to A?
YES NO
Positive or
Negative work?

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Work of a Force
13 - 15
Forces which do not do work (ds = 0 or cos :
• Weight of a body when its center of gravity
moves horizontally.
• Reaction at a roller moving along its track, and
• Reaction at frictionless surface when body
in contact moves along surface,
• Reaction at frictionless pin supporting rotating body,
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
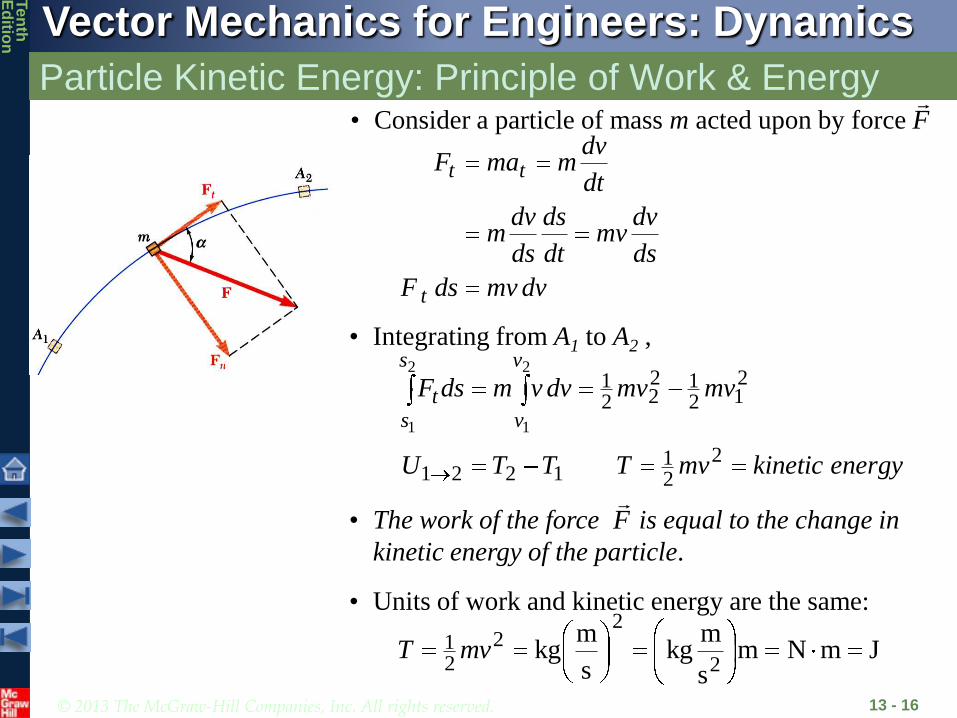
Particle Kinetic Energy: Principle of Work & Energy
13 - 16
dvmvdsF
ds
dvmv
dt
ds
ds
dvm
dt
dvmmaF
t
tt
• Consider a particle of mass m acted upon by force F
• Integrating from A1 to A2 ,
energykineticmvTTTU
mvmvdvvmdsFv
v
s
st
221
1221
212
1222
12
1
2
1
• The work of the force is equal to the change in
kinetic energy of the particle.
F
• Units of work and kinetic energy are the same:
JmNms
mkg
s
mkg
2
22
21 mvT

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 17

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Th
2 - 18
The work-kinetic energy is a scalar equation. Although in Cartesian coordinates
we find change in kinetic energy in x direction is equal to work done in that
direction. This is not true for cylindrical coordinates.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Applications of the Principle of Work and Energy
13 - 19
• The bob is released
from rest at position A1.
Determine the velocity
of the pendulum bob at
A2 using work & kinetic
energy.
• Force acts normal to path and does no
work.
P
glv
vg
WWl
TUT
2
2
10
2
22
2211
• Velocity is found without determining
expression for acceleration and integrating.
• All quantities are scalars and can be added
directly.
• Forces which do no work are eliminated from
the problem.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Applications of the Principle of Work and Energy
13 - 20
• Principle of work and energy cannot be
applied to directly determine the acceleration
of the pendulum bob.
• Calculating the tension in the cord requires
supplementing the method of work and energy
with an application of Newton’s second law.
• As the bob passes through A2 ,
Wl
gl
g
WWP
l
v
g
WWP
amF nn
32
22
glv 22
If you designed the rope to hold twice the weight of the bob, what would happen?

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Power and Efficiency
13 - 21
• rate at which work is done.
vF
dt
rdF
dt
dU
Power
• Dimensions of power are work/time or force*velocity.
Units for power are
W746s
lbft550 hp 1or
s
mN 1
s
J1 (watt) W 1
•
inputpower
outputpower
input work
koutput wor
efficiency

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.3
13 - 22
A spring is used to stop a 60 kg package
which is sliding on a horizontal surface.
The spring has a constant k = 20 kN/m
and is held by cables so that it is initially
compressed 120 mm. The package has a
velocity of 2.5 m/s in the position shown
and the maximum deflection of the spring
is 40 mm.
Determine (a) the coefficient of kinetic
friction between the package and surface
and (b) the velocity of the package as it
passes again through the position shown.
SOLUTION:
• Apply the principle of work and energy
between the initial position and the
point at which the spring is fully
compressed and the velocity is zero.
The only unknown in the relation is the
friction coefficient.
• Apply the principle of work and energy
for the rebound of the package. The
only unknown in the relation is the
velocity at the final position.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.3
13 - 23
SOLUTION:
• Apply principle of work and energy between initial
position and the point at which spring is fully compressed.
0J5.187sm5.2kg60 22
212
121
1 TmvT
kk
kfxWU
J377m640.0sm81.9kg60 2
21
J0.112m040.0N3200N2400
N3200m160.0mkN20
N2400m120.0mkN20
21
maxmin21
21
0max
0min
xPPU
xxkP
kxP
e
J112J377212121 kefUUU
0J112J 377-J5.187
:2211
k
TUT
20.0k

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.3
13 - 24
• Apply the principle of work and energy for the rebound
of the package.
232
1232
132 kg600 vmvTT
J36.5
J112J377323232 kefUUU
232
1
3322
kg60J5.360
:
v
TUT
sm103.13v

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 25
Packages are thrown down an
incline at A with a velocity of 1
m/s. The packages slide along
the surface ABC to a conveyor
belt which moves with a
velocity of 2 m/s. Knowing that
k= 0.25 between the packages
and the surface ABC, determine
the distance d if the packages
are to arrive at C with a velocity
of 2 m/s.
SOLUTION:
The problem deals with a change in
position and different velocities, so use
work-energy.
• Find the kinetic energy at points A
and C.
• Determine the work done between
points A and C as a function of d.
• Use the work-energy relationship
and solve for d.
• Draw FBD of the box to help us
determine the forces that do work.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 26
SOLUTION:
Given: vA= 1 m/s, vC= 2 m/s, k= 0.25
Find: distance d
Will use:
Draw the FBD of the
block at points A and C
A A B B C CT U U T
Determine work done A → B
cos30
0.25 cos 30
sin 30
(sin 30 cos 30 )
AB
AB k AB
A B AB
k
N mg
F N mg
U mg d F d
mg d
7 m
BC BC
BC k
B C k BC
N mg x
F mg
U mg x
Determine work done B → C

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 27
A A B B C CT U U T
Determine kinetic energy at A and at C
Substitute values into
21and 1 m/s
2A A AT mv v 21
and 2 m/s2
C C CT mv v
2 20
1 1(sin30 cos30 )
2 2A k k BCmv mg d mg x mv
2 2
2 2
/2 /2
(sin30 cos30 )
(2) /(2)(9.81) (0.25)(7) (1) /(2)(9.81)
sin30 0.25cos30
C k BC A
k
v g x v gd
6.71 md
Divide by m and solve for d

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 28
If you wanted to bring the package to a complete stop at the
bottom of the ramp, would it work to place a spring as shown?
Would the package ever come to a stop?
k= 0.25
No, because the potential energy of the spring would turn
into kinetic energy and push the block back up the ramp
Yes, eventually enough energy would be dissipated
through the friction between the package and ramp.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 29
The potential energy stored at
the top of the roller coaster is
transferred to kinetic energy
as the cars descend.
The elastic potential energy
stored in the trampoline is
transferred to kinetic energy
and gravitational potential
energy as the girl flies upwards.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Potential Energy
2 - 30
If the work of a force only depends on differences in
position, we can express this work as potential energy.
Can the work done by the following forces be expressed as
potential energy?
Weight
Friction
Spring force
Normal force
Yes
No
Yes
No
No
Yes
Yes
No
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
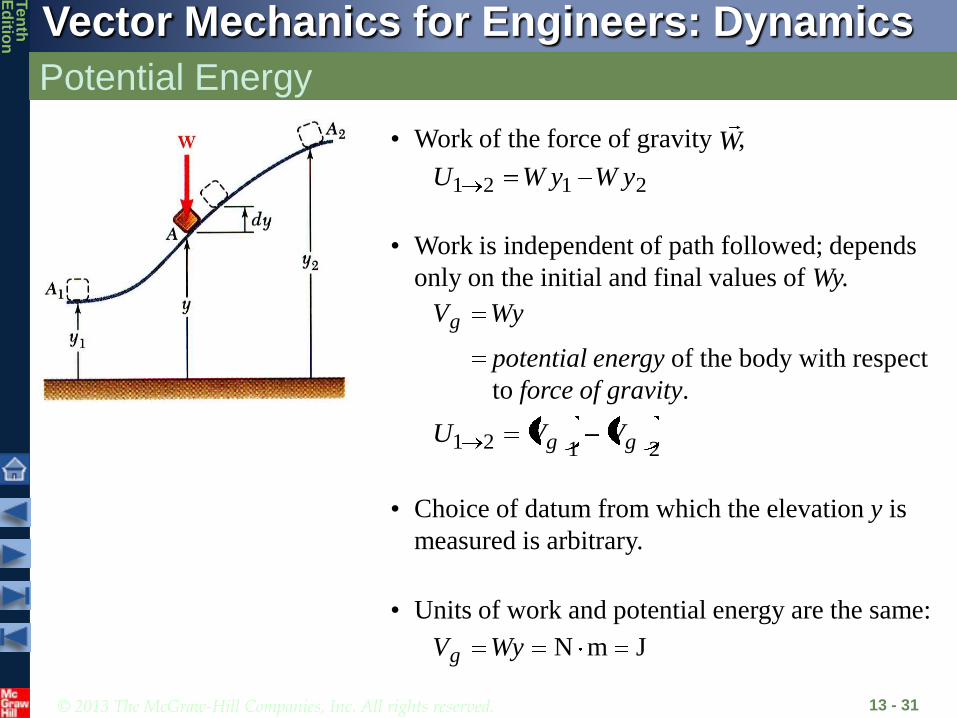
Potential Energy
13 - 31
2121 yWyWU
• Work of the force of gravity , W
• Work is independent of path followed; depends
only on the initial and final values of Wy.
WyVg
potential energy of the body with respect
to force of gravity.
2121 gg VVU
• Units of work and potential energy are the same:
JmNWyVg
• Choice of datum from which the elevation y is
measured is arbitrary.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Potential Energy
13 - 32
• Previous expression for potential energy of a body
with respect to gravity is only valid when the
weight of the body can be assumed constant.
• For a space vehicle, the variation of the force of
gravity with distance from the center of the earth
should be considered.
• Work of a gravitational force,
1221
r
GMm
r
GMmU
• Potential energy Vg when the variation in the
force of gravity can not be neglected,
r
WR
r
GMmVg
2
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
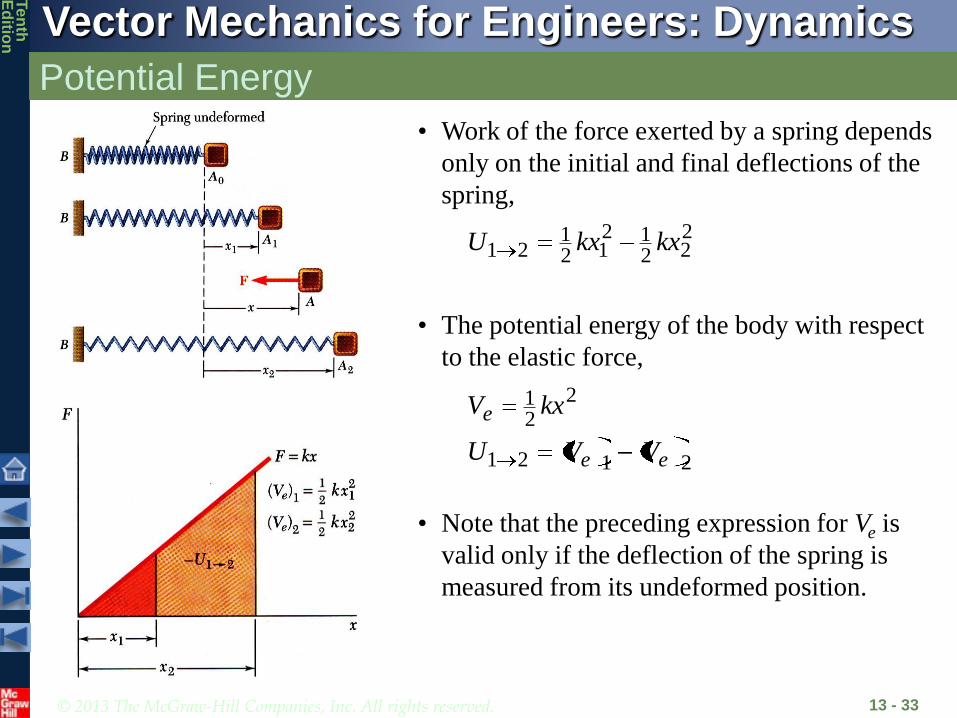
Potential Energy
13 - 33
• Work of the force exerted by a spring depends
only on the initial and final deflections of the
spring,
222
1212
121 kxkxU
• The potential energy of the body with respect
to the elastic force,
2121
221
ee
e
VVU
kxV
• Note that the preceding expression for Ve is
valid only if the deflection of the spring is
measured from its undeformed position.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Conservative Forces
13 - 34
• Concept of potential energy can be applied if the
work of the force is independent of the path
followed by its point of application.
22211121 ,,,, zyxVzyxVU
Such forces are described as conservative forces.
• For any conservative force applied on a closed path,
0rdF
• Elementary work corresponding to displacement
between two neighboring points,
zyxdV
dzzdyydxxVzyxVdU
,,
,,,,
Vz
V
y
V
x
VF
dzz
Vdy
y
Vdx
x
VdzFdyFdxF zyx
grad

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 35
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
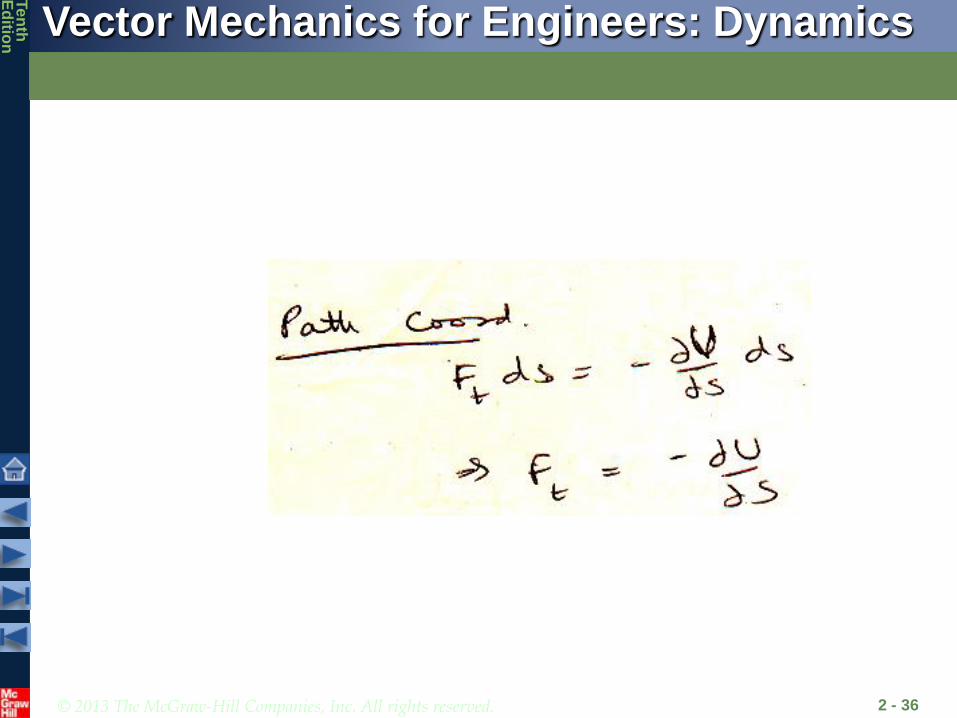
2 - 36

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 37

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 38

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 39

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Conservation of Energy
13 - 40
• Work of a conservative force,
2121 VVU
• Concept of work and energy,
1221 TTU
• Follows that
constant
2211
VTE
VTVT
• When a particle moves under the action of
conservative forces, the total mechanical
energy is constant.
WVT
WVT
11
11 0
WVT
VWgg
WmvT
22
2222
12 02
2
1• Friction forces are not conservative. Total
mechanical energy of a system involving
friction decreases.
• Mechanical energy is dissipated by friction
into thermal energy. Total energy is constant.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Motion Under a Conservative Central Force
13 - 41
• When a particle moves under a conservative central
force, both the principle of conservation of angular
momentum
and the principle of conservation of energy
may be applied.
sinsin 000 rmvmvr
r
GMmmv
r
GMmmv
VTVT
221
0
202
1
00
• Given r, the equations may be solved for v and
• At minimum and maximum r, 90o. Given the
launch conditions, the equations may be solved for
rmin, rmax, vmin, and vmax.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.7
13 - 42
The 250 g pellet is pushed against the
spring and released from rest at A.
Neglecting friction, determine the
smallest deflection of the spring for
which the pellet will travel around the
loop and remain in contact with the
loop at all times.
SOLUTION:
• Since the pellet must remain in contact
with the loop, the force exerted on the
pellet must be greater than or equal to
zero. Setting the force exerted by the
loop to zero, solve for the minimum
velocity at D.
• Apply the principle of conservation of
energy between points A and D. Solve
for the spring deflection required to
produce the required velocity and
kinetic energy at D.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.7
13 - 43
SOLUTION:
• Setting the force exerted by the loop to zero, solve for the
minimum velocity at D.
:nn maF2
22 2 20.5 m 9.81m s 4.905m s
n D
D
W ma mg mv r
v rg
• Apply the principle of conservation of energy between
points A and D.
2 2 21 11 2 2
1
0 600N/m 300
0
e gV V V kx x x
T
22
2 2 212 2
0 0.25kg 9.81m/s (1 m) 2.45J
10.25 kg 4.905m s 0.613J
2
e g
D
V V V Wy
T mv
1 1 2 2
20 300 2.45J 0.613J
T V T V
x0.101 m 10/mmx

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 44

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 45

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 46

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.9
13 - 47
A satellite is launched in a direction
parallel to the surface of the earth
with a velocity of 36900 km/h from
an altitude of 500 km.
Determine (a) the maximum altitude
reached by the satellite, and (b) the
maximum allowable error in the
direction of launching if the satellite
is to come no closer than 200 km to
the surface of the earth
SOLUTION:
• For motion under a conservative central
force, the principles of conservation of
energy and conservation of angular
momentum may be applied simultaneously.
• Apply the principles to the points of
minimum and maximum altitude to
determine the maximum altitude.
• Apply the principles to the orbit insertion
point and the point of minimum altitude to
determine maximum allowable orbit
insertion angle error.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.9
13 - 48
• Apply the principles of conservation of energy and
conservation of angular momentum to the points of minimum
and maximum altitude to determine the maximum altitude.
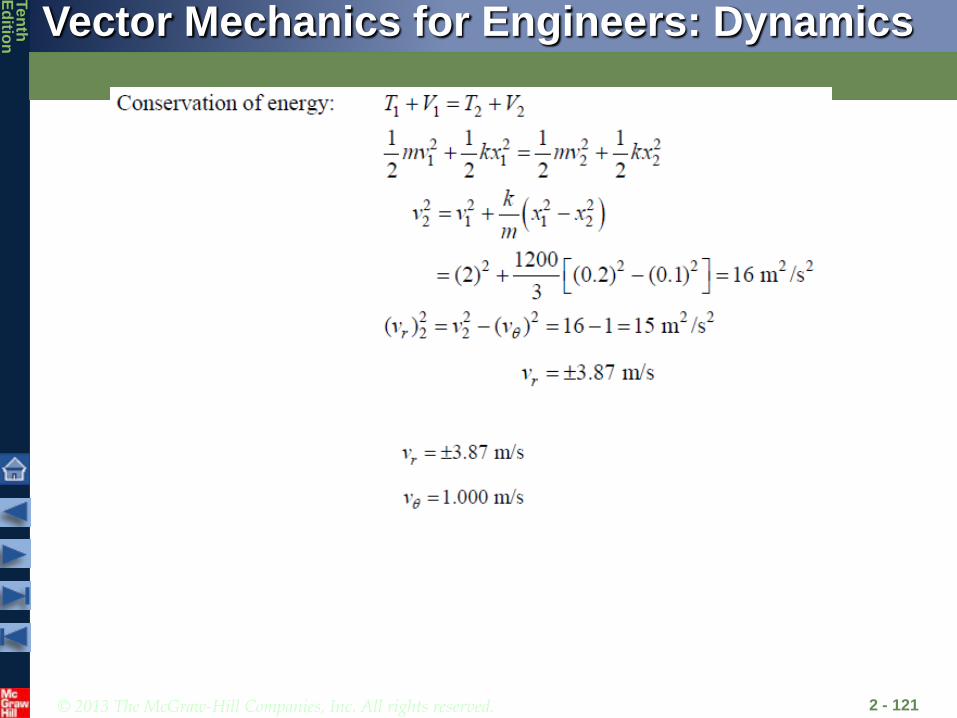
Conservation of energy:
1
212
1
0
202
1
r
GMmmv
r
GMmmvVTVT AAAA
Conservation of angular momentum:
1
0011100
r
rvvmvrmvr
Combining,
2001
0
1
0
02
1
202
021 2
111vr
GM
r
r
r
r
r
GM
r
rv
23122622
60
0
sm10398m1037.6sm81.9
sm1025.10hkm36900
km6870km500km6370
gRGM
v
r
km 60400m104.60 61r

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.9
13 - 49
• Apply the principles to the orbit insertion point and the point
of minimum altitude to determine maximum allowable orbit
insertion angle error.
Conservation of energy:
min
2max2
1
0
202
100
r
GMmmv
r
GMmmvVTVT AA
Conservation of angular momentum:
min
000maxmaxmin000 sinsin
r
rvvmvrmvr
Combining and solving for sin ,
5.1190
9801.0sin
0
0
5.11error allowable

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 50
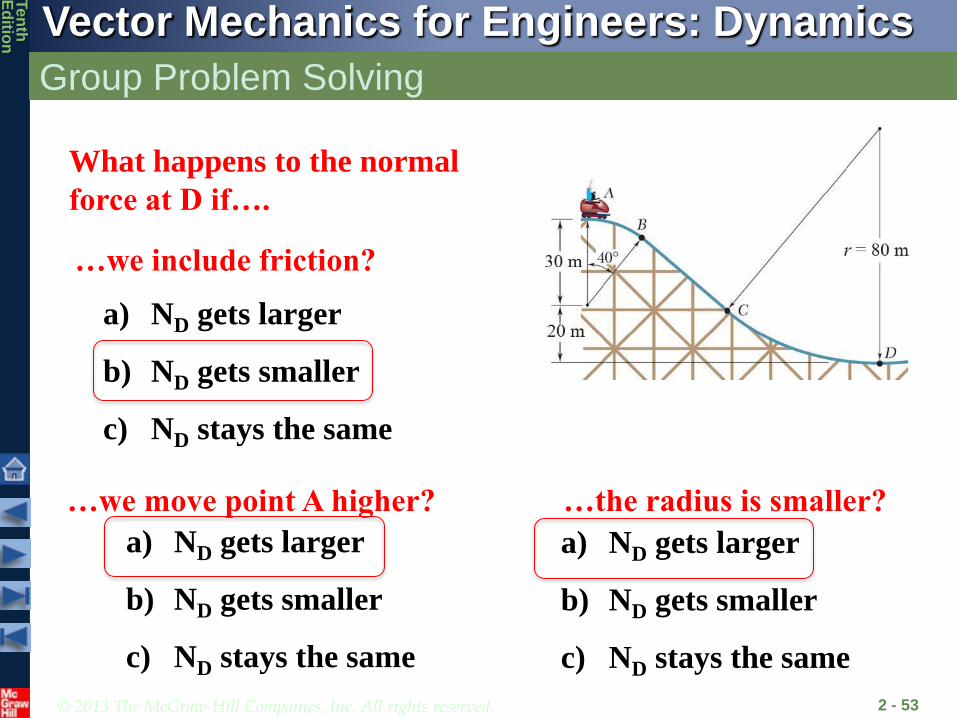
A section of track for a roller coaster
consists of two circular arcs AB and CD
joined by a straight portion BC. The radius
of CD is 80 m. The car and its occupants,
of total mass 300 kg, reach Point A with
practically no velocity and then drop freely
along the track. Determine the normal
force exerted by the track on the car at
point D. Neglect air resistance and rolling
resistance.
SOLUTION:
• This is two part problem – you
will need to find the velocity of
the car using work-energy, and
then use Newton’s second law
to find the normal force.
• Draw a diagram with the car
at points A and D, and
define your datum. Use
conservation of energy to
solve for vD
• Draw FBD and KD of the car
at point D, and determine the
normal force using Newton’s
second law.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 51
SOLUTION:
Given: vA= 0 m/s, rCD= 800 m, W=300 kg
Find: ND
Define your datum, sketch the
situation at points of interest
Datum
Use conservation of energy to find vD A A D DT V T V
0 0A Av T
2(300 kg)(9.81m/s )(30 m 20 m) =147150 JA AV mgy
2 2 21 1(300) 150
2 2D D D DT mv v v
Find TA
Find VA
Find TD
Find VD 0 0D Dy V
Solve for vD 2
2
150 147150
981
D
D
v
v
13.321 m/sDv

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 52
Draw FBD and KD at point D
Use Newton’s second law in the normal direction
n nF ma
W
ND
man
mat
2D
D
vN mg m
R
981300 9.81
80DN
6620 NDN
en
et
2D
D
vN m g
R
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 53
What happens to the normal
force at D if….
a) ND gets larger
b) ND gets smaller
c) ND stays the same
…we move point A higher? …the radius is smaller?
…we include friction?
a) ND gets larger
b) ND gets smaller
c) ND stays the same
a) ND gets larger
b) ND gets smaller
c) ND stays the same

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Impulsive Motion
2 - 54
The impulse applied to the railcar
by the wall brings its momentum
to zero. Crash tests are often
performed to help improve safety
in different vehicles.
The thrust of a rocket acts
over a specific time period
to give the rocket linear
momentum.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Principle of Impulse and Momentum
13 - 55
• From Newton’s second law,
vmvmdt
dF
linear momentum
2211
21 force theof impulse 2
1
vmvm
FdtFt
t
Imp
Imp
• The final momentum of the particle can be
obtained by adding vectorially its initial
momentum and the impulse of the force during
the time interval.
12
2
1
vmvmdtF
vmddtF
t
t
• Dimensions of the impulse of
a force are
force*time.
• Units for the impulse of a
force are
smkgssmkgsN 2

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Impulsive Motion
13 - 56
• Force acting on a particle during a very short
time interval that is large enough to cause a
significant change in momentum is called an
impulsive force.
• When impulsive forces act on a particle,
21 vmtFvm
• When a baseball is struck by a bat, contact
occurs over a short time interval but force is
large enough to change sense of ball motion.
• Nonimpulsive forces are forces for which
is small and therefore, may be
neglected – an example of this is the weight
of the baseball.
tF

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.10
13 - 57
An automobile of mass 1800 kg is
driven down a 5o incline at a speed of
100 km/h when the brakes are applied,
causing a constant total braking force of
7000 N.
Determine the time required for the
automobile to come to a stop.
SOLUTION:
• Apply the principle of impulse and
momentum. The impulse is equal to the
product of the constant forces and the
time interval.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.10
13 - 58
SOLUTION:
• Apply the principle of impulse and
momentum.
2211 vmvm
Imp
Taking components parallel to the
incline,
1
2
sin5 0
km 1000 m 1h100 km/h 100 27.78 m/s
h 1 km 3600 s
1800 kg 2778 m/s 1800 kg 9.81m/s (sin 5 ) (7000 N) 0
mv mg t Ft
t t
9.16st
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.11
13 - 59
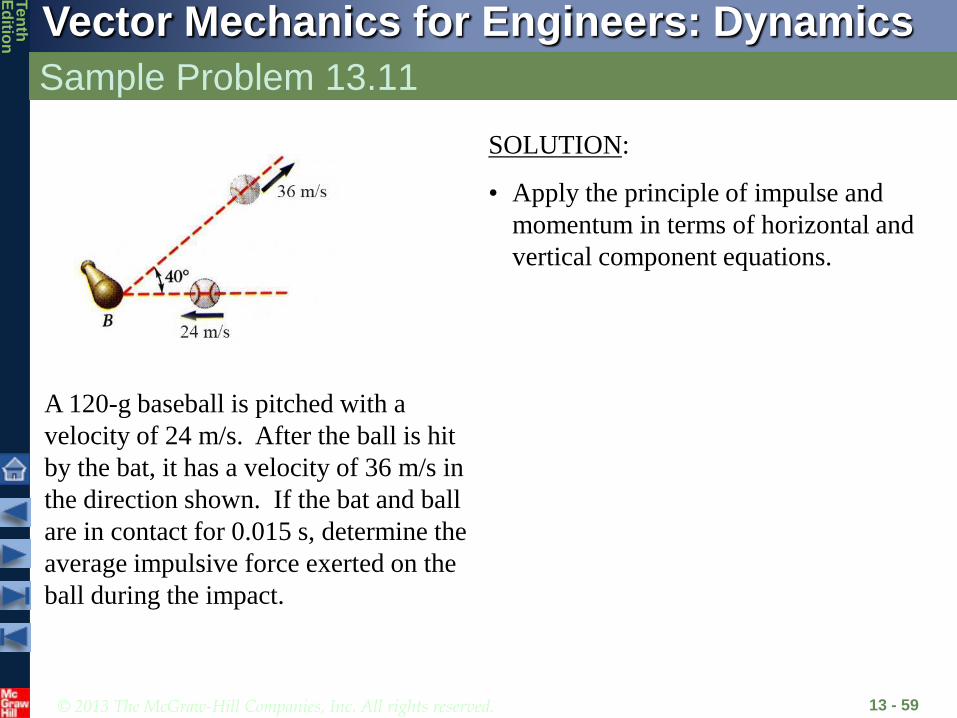
A 120-g baseball is pitched with a
velocity of 24 m/s. After the ball is hit
by the bat, it has a velocity of 36 m/s in
the direction shown. If the bat and ball
are in contact for 0.015 s, determine the
average impulsive force exerted on the
ball during the impact.
SOLUTION:
• Apply the principle of impulse and
momentum in terms of horizontal and
vertical component equations.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.11
13 - 60
SOLUTION:
• Apply the principle of impulse and momentum in
terms of horizontal and vertical component equations.
2211 vmvm
Imp
x
y
x component equation:
1 2 cos40
(0.12 kg)(24 m/s) (0.015 s) (0.12 kg)(36 m/s) cos 40
412.6 N
x
x
x
mv F t mv
F
F
y component equation:
20 sin 40
0.015 (0.12 kg)(36 m/s) sm40
185.1N
y
y
y
F t mv
F
F
(413 N) (185.1N) , 452NF i j F

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.12
13 - 61
A 10 kg package drops from a chute
into a 24 kg cart with a velocity of 3
m/s. Knowing that the cart is initially at
rest and can roll freely, determine (a)
the final velocity of the cart, (b) the
impulse exerted by the cart on the
package, and (c) the fraction of the
initial energy lost in the impact.
SOLUTION:
• Apply the principle of impulse and
momentum to the package-cart system
to determine the final velocity.
• Apply the same principle to the package
alone to determine the impulse exerted
on it from the change in its momentum.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.12
13 - 62
SOLUTION:
• Apply the principle of impulse and momentum to the package-cart
system to determine the final velocity.
2211 vmmvm cpp
Imp
x
y
x components:
2
21
kg 25kg 1030cosm/s 3kg 10
030cos
v
vmmvm cpp
m/s 742.02v

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.12
13 - 63
• Apply the same principle to the package alone to determine the impulse
exerted on it from the change in its momentum.
x
y
2211 vmvm pp
Imp
x components:
2
21
kg 1030cosm/s 3kg 10
30cos
vtF
vmtFvm
x
pxp
sN56.18tFx
y components:
030sinm/s 3kg 10
030sin1
tF
tFvm
y
yp
sN15tFy
sN 9.23sN 51sN 56.1821 tFjitF
Imp
The t is of order 10-4 or 10-5 s, F is much larger than weight, i.e. weight is
neglected. Impulse due to weight is 100*10-4 Ns

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.12
13 - 64
To determine the fraction of energy lost,
221 11 12 2
221 12 22 2
10 kg 3m s 45 J
10 kg 25 kg 0.742m s 9.63 J
p
p c
T m v
T m m v
786.0J 45
J 9.63J 45
1
21
T
TT

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 65
The jumper approaches the takeoff
line from the left with a horizontal
velocity of 10 m/s, remains in contact
with the ground for 0.18 s, and takes
off at a 50o angle with a velocity of 12
m/s. Determine the average impulsive
force exerted by the ground on his
foot. Give your answer in terms of the
weight W of the athlete.
SOLUTION:
• Draw impulse and momentum diagrams
of the jumper.
• Apply the principle of impulse and
momentum to the jumper to determine
the force exerted on the foot.
Here, dt is quite large and weight
should not be neglected

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 66
Draw impulse and momentum diagrams of the jumper
1mv2mv
+ = 50º
Use the impulse momentum equation in y to find Favg
W t
Given: v1 = 10 m/s, v2= 12 m/s at 50º,
Δt= 0.18 s
Find: Favg in terms of W
avgF t
1 2( ) 0.18 sm t m tv P W v
x
y

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 67
1mv2mv
+ = 50º
Use the impulse momentum equation in x and y to find Favg
W tavgF t
1 2( ) 0.18 savgm t m tv F W v
0 ( )(0.18) (12)(sin 50 )
(12)(sin 50 )
(9.81)(0.18)
avg y
avg y
WF W
g
F W W
(10) ( )(0.18) (12)(cos 50 )
10 (12)(cos 50 )
(9.81)(0.18)
avg x
avg x
W WF
g g
F W
1.295 6.21avg W WF i j
x
y
Favg-x is positive, which means we
guessed correctly (acts to the left)

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 68
Car A and B crash into
one another. Looking
only at the impact, which
of the following
statements are true?
The total mechanical energy is the
same before and after the impact
If car A weighs twice as much as car B,
the force A exerts on car B is bigger
than the force B exerts on car A.
The total linear momentum is the same
immediately before and after the impact
True False
True False
True False

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 69
The coefficient of restitution is used
to characterize the “bounciness” of
different sports equipment. The U.S.
Golf Association limits the COR of
golf balls at 0.83
Civil engineers use the
coefficient of restitution to
model rocks falling from
hillsides

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Impact
13 - 70
• Impact: Collision between two bodies which
occurs during a small time interval and during
which the bodies exert large forces on each other.
• Line of Impact: Common normal to the surfaces
in contact during impact.
• Central Impact: Impact for which the mass
centers of the two bodies lie on the line of impact;
otherwise, it is an eccentric impact..
Direct Central Impact
• Direct Impact: Impact for which the velocities of
the two bodies are directed along the line of
impact.
Oblique Central Impact
• Oblique Impact: Impact for which one or both of
the bodies move along a line other than the line of
impact.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Direct Central Impact
13 - 71
• Bodies moving in the same straight line,
vA > vB .
• Upon impact the bodies undergo a
period of deformation, at the end of which,
they are in contact and moving at a
common velocity.
• A period of restitution follows during
which the bodies either regain their
original shape or remain permanently
deformed.
• Wish to determine the final velocities of the
two bodies. The total momentum of the
two body system is preserved,
BBBBBBAA vmvmvmvm
• A second relation between the final
velocities is required.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Direct Central Impact
13 - 72
• Period of deformation: umPdtvm AAA
• Period of restitution: AAA vmRdtum
10 e
uv
vu
Pdt
Rdt
nrestitutio of tcoefficien e
A
A
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Direct Central Impact
13 - 73
• A similar analysis of particle B yields B
B
vu
uv e
• Combining the relations leads to the desired
second relation between the final velocities. BAAB vvevv
• Perfectly plastic impact, e = 0: vvv AB vmmvmvm BABBAA
• Perfectly elastic impact, e = 1:
Total energy and total momentum conserved. BAAB vvvv

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Oblique Central Impact
13 - 74
• Final velocities are
unknown in magnitude
and direction. Four
equations are required.
tBtBtAtA vvvv
nBBnAAnBBnAA vmvmvmvm
nBnAnAnB vvevv

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 75
In deriving above equations the balls nothing was said as to
how they were supported. They could be supported in z-
direction (lying on a table) but impact was in x-y plane, so no
external forces due to reactions were there in x-y plane.
In the next problem, reaction forces are in the plane of impact.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Oblique Central Impact
13 - 76
• Block constrained to move along horizontal
surface.
• Impulses from internal forces
along the n axis and from external force
exerted by horizontal surface and directed
along the vertical to the surface.
FF
and
extF
• Final velocity of ball unknown in direction and
magnitude and unknown final block velocity
magnitude. Three equations required.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Oblique Central Impact
13 - 77
• Tangential momentum of ball is
conserved. tBtB vv
• Total horizontal momentum of block
and ball is conserved. xBBAAxBBAA vmvmvmvm
• Normal component of relative
velocities of block and ball are related
by coefficient of restitution.
nBnAnAnB vvevv
• Note: Validity of last expression does not follow from previous relation for
the coefficient of restitution. A similar but separate derivation is required.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 78

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 79

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 80

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 81

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Problems Involving Energy and Momentum
13 - 82
• Three methods for the analysis of kinetics problems:
- Direct application of Newton’s second law
- Method of work and energy
- Method of impulse and momentum
• Select the method best suited for the problem or part of a problem
under consideration.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.16
13 - 83
Ball B is hanging from an inextensible cord. An identical
ball A is released from rest when it is just touching the
cord and acquires a velocity v0 before striking ball B.
Assuming perfectly elastic impact (e = 1) and no friction,
determine the velocity of each ball immediately after
impact.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.16
13 - 84
SOLUTION:
• Determine orientation of impact line of
action.
• The momentum component of ball A
tangential to the contact plane is
conserved.
• The total horizontal momentum of the
two ball system is conserved.
• The relative velocities along the line of
action before and after the impact are
related by the coefficient of restitution.
• Solve the last two expressions for the
velocity of ball A along the line of action
and the velocity of ball B which is
horizontal.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.16
13 - 85
SOLUTION:
• Determine orientation of impact line of action.
30
5.02
sinr
r
• The momentum component of ball A
tangential to the contact plane is
conserved.
0
0
5.0
030sin
vv
vmmv
vmtFvm
tA
tA
AA

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.16
13 - 86
• The total horizontal (x component)
momentum of the two ball system is
conserved.
0
0
433.05.0
30sin30cos5.00
30sin30cos0
vvv
vvv
vmvmvm
vmvmtTvm
BnA
BnA
BnAtA
BAA

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.16
13 - 87
• The relative velocities along the line of action before
and after the impact are related by the coefficient of
restitution.
0
0
866.05.0
030cos30sin
vvv
vvv
vvevv
nAB
nAB
nBnAnAnB

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.16
13 - 88
• Solve the last two expressions for the velocity
of ball A along the line of action and the
velocity of ball B which is horizontal.
00 693.0520.0 vvvv BnA
0
10
00
693.0
1.16301.46
1.465.0
52.0tan721.0
520.05.0
vv
vv
vvv
B
A
ntA

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.17
13 - 89
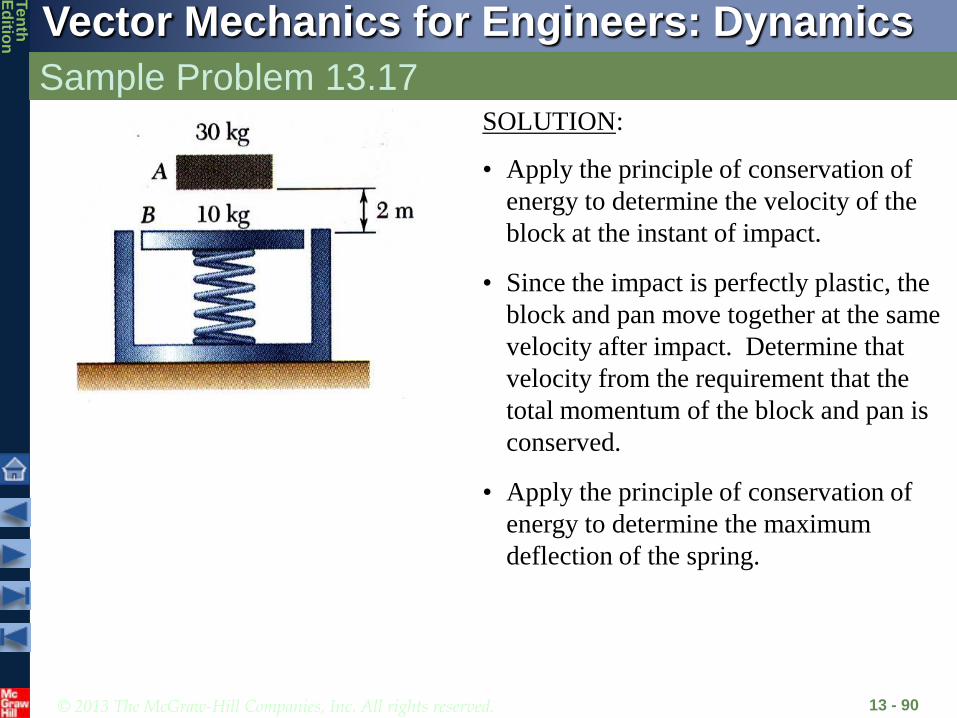
A 30 kg block is dropped from a height of 2 m onto the the
10 kg pan of a spring scale. Assuming the impact to be
perfectly plastic, determine the maximum deflection of the
pan. The constant of the spring is k = 20 kN/m.
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.17
13 - 90
SOLUTION:
• Apply the principle of conservation of
energy to determine the velocity of the
block at the instant of impact.
• Since the impact is perfectly plastic, the
block and pan move together at the same
velocity after impact. Determine that
velocity from the requirement that the
total momentum of the block and pan is
conserved.
• Apply the principle of conservation of
energy to determine the maximum
deflection of the spring.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.17
13 - 91
SOLUTION:
• Apply principle of conservation of energy to determine
velocity of the block at instant of impact.
sm26.6030 J 5880
030
J 588281.9300
2222
1
2211
2222
1222
12
11
AA
AAA
A
vv
VTVT
VvvmT
yWVT

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.17
13 - 92
• Determine velocity after impact from requirement that total
momentum of the block and pan is conserved.
sm70.41030026.630 33
322
vv
vmmvmvm BABBAA

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.17
13 - 93
Initial spring deflection due to
pan weight:
m1091.41020
81.910 3
33k
Wx B
• Apply the principle of conservation of energy to determine the
maximum deflection of the spring.
2 21 13 32 2
3
22 3 31 132 2
4
30 10 4.7 442 J
0 20 10 4.91 10 0.241 J
0
A B
g e
T m m v
V V V
kx
T

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.17
13 - 94
214 42
3 214 3 42
3 3 214 42
392 20 10
392 4.91 10 20 10
g e A BV V V W W h kx
x x x
x x
m 1091.4m 230.0 334 xxh m 225.0h

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Sample Problem 13.17
13 - 95
m 230.0
10201091.43920241.0442
4
24
3
213
4
4433
x
xx
VTVT

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 96

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 97
A 2-kg block A is pushed up against a spring
compressing it a distance x= 0.1 m. The block is
then released from rest and slides down the 20º
incline until it strikes a 1-kg sphere B, which is
suspended from a 1 m inextensible rope. The
spring constant k=800 N/m, the coefficient of
friction between A and the ground is 0.2, the
distance A slides from the unstretched length of
the spring d=1.5 m, and the coefficient of
restitution between A and B is 0.8. When =40o,
find (a) the speed of B (b) the tension in the rope.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 98
SOLUTION:
• This is a multiple step problem.
Formulate your overall approach.
• Use work-energy to find the
velocity of the block just
before impact

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 99
• Use conservation of momentum to
determine the speed of ball B after the
impact
• Use work energy to find the velocity at
• Use Newton’s 2nd Law to find tension
in the rope

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 100
Given: mA= 2-kg mB= 1-kg,
k= 800 N/m, A =0.2, e= 0.8
Find (a) vB (b) Trope

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 101
• Use work-energy to find the velocity of
the block just before impact
Determine the friction force acting on the
block A

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 102
cos 0AN m g cos
(2)(9.81)cos 20
18.4368 N
(0.2)(18.4368)
3.6874 N
A
f k
N m g
F N
0:yF
Sum forces in
the y-direction
Solve for N

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 103
Set your datum, use work-energy
to determine vA at impact.
1 1 1 1 2 2 2 2( ) ( ) ( ) ( )e g e gT V V U T V V
Determine values for each term.
2 21 1 1
1 10, ( ) (800)(0.1) 4.00 J
2 2eT V k x
1 1( ) ( )sin (2)(9.81)(1.6)sin 20 10.7367 Jg A AV m gh m g x d
1 2 ( ) (3.6874)(1.6) 5.8998 JfU F x d
2 2 22 2
1 1(1)( ) 1.000 0
2 2A A A AT m v v v V
2
x d
1
Datum

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 104
Determine values for each term.
2 21 1 1
1 10, ( ) (800)(0.1) 4.00 J
2 2eT V k x
1 1( ) ( )sin (2)(9.81)(1.6)sin 20 10.7367 Jg A AV m gh m g x d
1 2 ( ) (3.6874)(1.6) 5.8998 JfU F x d
2 2 22 2
1 1(1)( ) 1.000 0
2 2A A A AT m v v v V

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 105
• Use conservation of
momentum to determine the
speed of ball B after the
impact
• Draw the
impulse
diagram
Note that the ball is
constrained to move only
horizontally immediately
after the impact.

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 106
Note that the ball is constrained to move only
horizontally immediately after the impact.
Apply
conservation of
momentum in
the x direction
(2)(2.9727)cos20 2 cos20 (1.00)A Bv v
cos 0 cosA A A A B Bm v m v m v
(1)
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
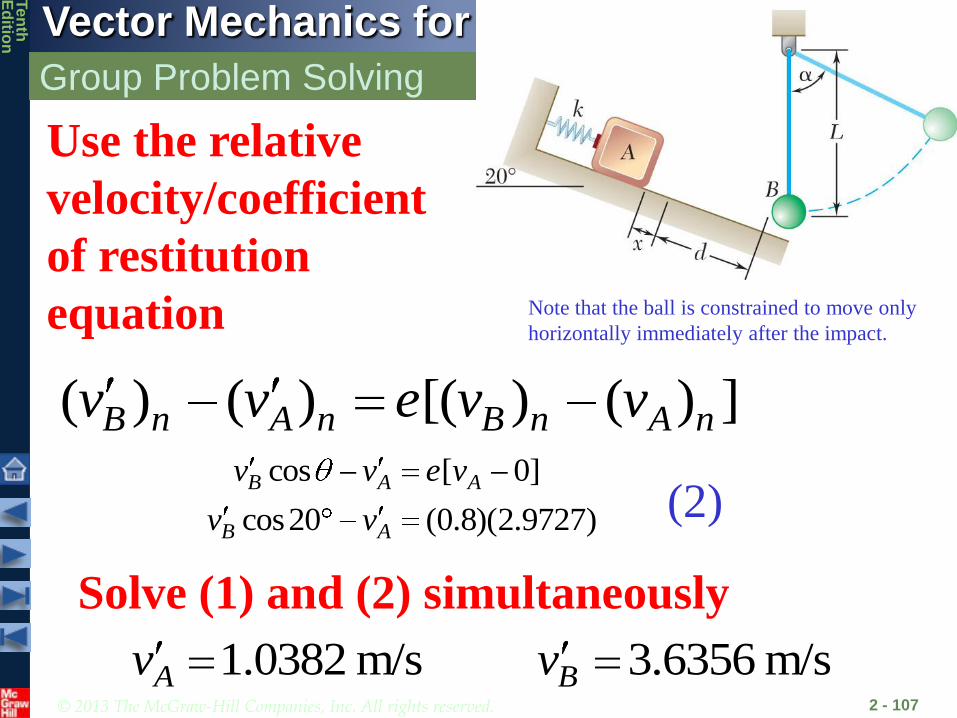
2 - 107
Note that the ball is constrained to move only
horizontally immediately after the impact.
( ) ( ) [( ) ( ) ]B n A n B n A nv v e v v
cos [ 0]
cos20 (0.8)(2.9727)
B A A
B A
v v e v
v v
Use the relative
velocity/coefficient
of restitution
equation
(2)
Solve (1) and (2) simultaneously
1.0382 m/s 3.6356 m/sA Bv v

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 108
• Use work energy to find
the velocity at
Set datum, use Work-Energy
to determine vB at = 40o 1
2
Datum
1 1 1 1 2 2 2 2( ) ( ) ( ) ( )e g e gT V V U T V V
Determine values for each term.
21 1
22 2 2 2
1( ) 0
2
1(1 cos )
2
B B
B B B
T m v V
T m v V m gh m gl

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 109
1
2
Datum
2 21 1 2 2 2
2 22
2
2 2
1 1: ( ) 0 (1 cos )
2 2
( ) 2 (1 cos )
(3.6356) (2)(9.81)(1 cos 40 )
8.6274 m /s
B B B B
B
T V T V m v m v m g
v v gl
2 2.94 m/sv
Substitute into the Work-
Energy equation and solve
for vA
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
2 - 110
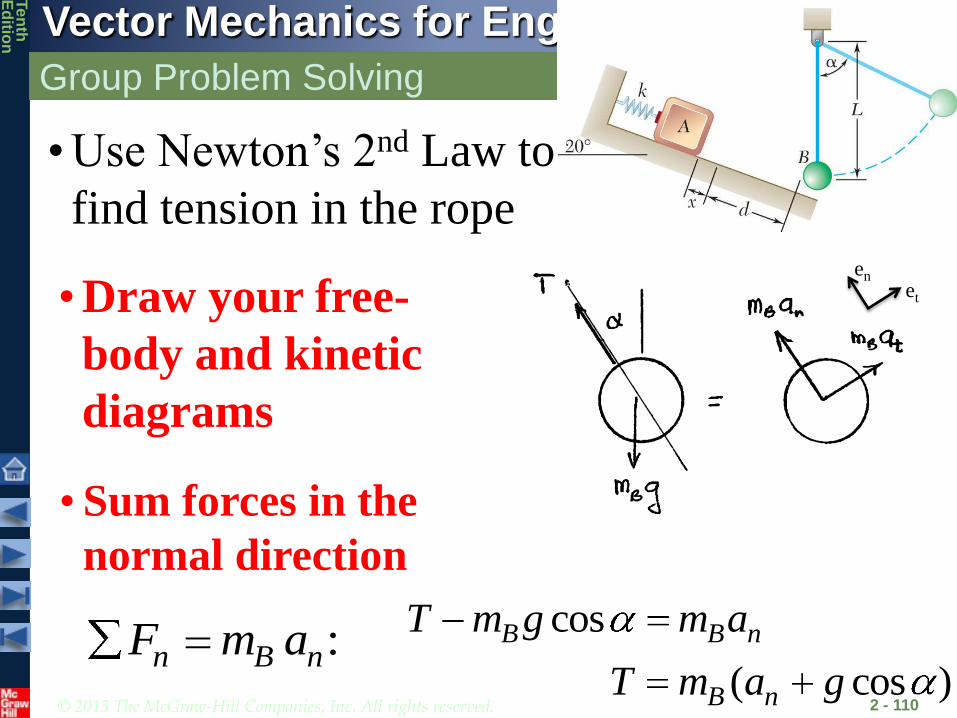
• Use Newton’s 2nd Law to
find tension in the rope
• Draw your free-
body and kinetic
diagrams
:n B nF m acos
( cos )
B B n
B n
T m g m a
T m a g
• Sum forces in the
normal direction
et
en
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Group Problem Solving
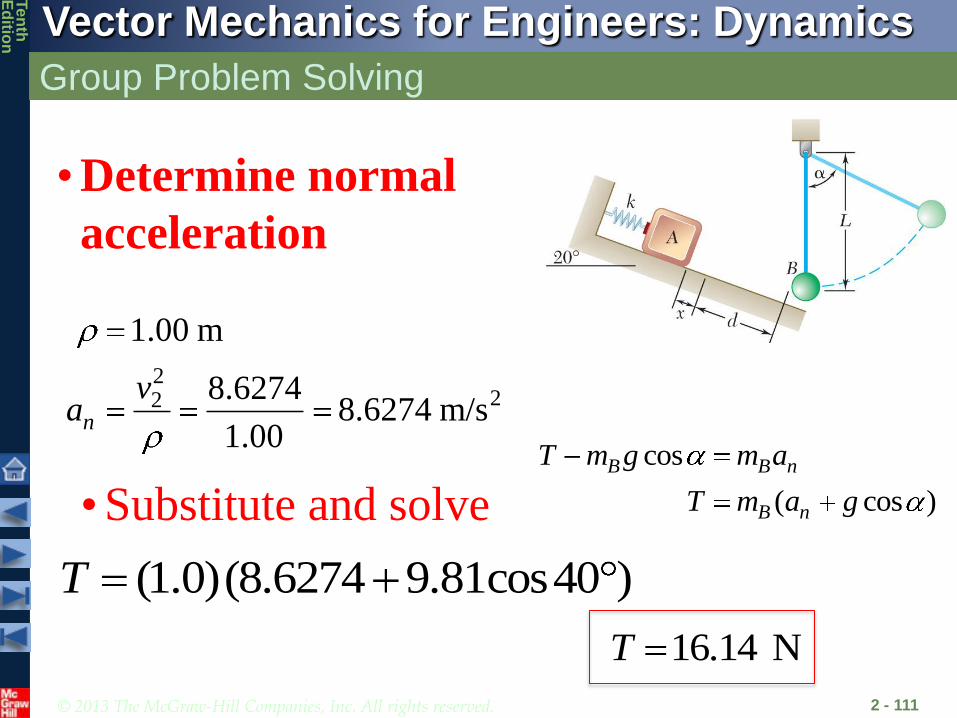
2 - 111
222
1.00 m
8.62748.6274 m/s
1.00n
va
(1.0)(8.6274 9.81cos40 )T
• Determine normal
acceleration
16.14 NT
• Substitute and solve
cos
( cos )
B B n
B n
T m g m a
T m a g

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Concept Question
2 - 112
If the coefficient of
restitution is smaller
than the 0.8 in the
problem, the tension
T will be…
Smaller Bigger
Compare the following statement to the problem
you just solved.
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Concept Question
2 - 113
If the rope length is smaller than the
1 m in the problem, the tension T
will be…
Smaller Bigger

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Concept Question
2 - 114
If the coefficient of
friction is smaller
than 0.2 given in
the problem, the
tension T will be…
Smaller Bigger

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Concept Question
2 - 115
If the mass of A is
smaller than the 2
kg given in the
problem, the
tension T will be…
Smaller Bigger

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Summary
2 - 116
Forces and
Accelerations
Velocities and
Displacements Velocities
and Time
Approaches to Kinetics Problems
Newton’s
Second Law
(last chapter)
Work-
Energy
Impulse-
Momentum
2211 TUT
GF ma
2
11 2
t
tmv F dt mv

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
Summary
2 - 117
Forces and
Accelerations
Velocities and
Displacements
Velocities and
Time
Approaches to Kinetics Problems
Newton’s Second
Law (last chapter)
Work-Energy Impulse-
Momentum
2211 TUTGF ma
2
11 2
t
tmv F dt mv

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 118

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 119

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 120
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 121

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 122
© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 123

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 124

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 125

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 126

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 127

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 128

© 2013 The McGraw-Hill Companies, Inc. All rights reserved.
Vector Mechanics for Engineers: Dynamics
Te
nth
E
ditio
n
2 - 129