study of new start method for position sensorless
TRANSCRIPT

Extended Summary 本文は pp.1531–1538
Study of New Start Method for Position Sensorless Brushless DC Motor
Yukio Kawabata Member (Hitachi, Ltd., [email protected])
Tsunehiro Endo Member (Hitachi, Ltd., [email protected])
Takakura Yuhachi Non-member (Hitachi Home & Life Solutions, Inc.)
Ishii Makoto Non-member (Hitachi Home & Life Solutions, Inc.)
Keywords: brushless DC motors, sensorless, back electromotive force, PWM control
A lot of brushless DC motors are adopted in the compressor of theair conditioner and the refrigerator because of the maintenance-freeand highly effective. And, sensorless drive using back electromotiveforce (EMF) is widely used for these motor controls.
However, it is very difficult to apply the sensorless drive at thestart sequence because the EMF is too low to detect. Therefore, anopen loop drive that controlled by fixed switching pattern is used atthe start sequence. After acceleration up to the appropriate speed,the drive method switches to the sensorless drive from the open loopdrive.
This start sequence has some problems. The motor output torqueand the rotational speed change greatly when the motor is driven byan open loop control, and it causes the vibration. Furthermore, it isimportant to adjust the switching patterns of the open loop appropri-ately. If it is not adjusted appropriately, the switch to the sensorlessdrive may fail.
In this paper, we propose new start method suitable for sensorlessbrushless DC motor drive systems. The proposed method introducesnew switching patterns at the start point. The switching patterns aredetermined by motor parameters. Using this method, the open loopdrive sequence can be eliminated.
Fig. 1 shows the simulation result of the motor output torque andthe rotational speed of conventional open loop start method.
The motor output torque and rotational speed change greatly andthe vibration occurs after the start.
Fig. 2 shows the simulation result of the motor torque output andthe rotational speed of new start method.
The motor output torque and the rotational speed are smooth fromthe start.
Fig. 3 shows the experimental result that shows applied voltageand the motor current waveform at the start.
Fig. 1. Simulation result of conventional open loop start method(Load torque: 50%)
The smooth acceleration is obtained using the proposed method.As mentioned above, we has proposed new start method for
brushless DC motors. Rapid acceleration and high performance canbe achieved. The simulation and experimental results demonstratedthe validity of the proposed method.
(a) Motor output torque, Rotational speed, Applied voltage
(b) Voltage of terminal, Back EMF, Direct current
Fig. 2. Simulation result of the proposed method(Load torque: 50%)
Fig. 3. Experiment result of new start method(Load torque: 50%)
– 15 –

論 文
位置センサレス・ブラシレスDCモータの新起動法に関する検討
正 員 川端 幸雄∗ 正 員 遠藤 常博∗
非会員 高倉 雄八∗∗ 非会員 石井 誠∗∗
Study of New Start Method for Position Sensorless Brushless DC Motor
Yukio Kawabata∗, Member, Tsunehiro Endo∗, Member, Takakura Yuhachi∗∗, Non-member,
Ishii Makoto∗∗, Non-member
The position sensor-less drive technique based on the back electromotive force (EMF) has been widely used for
brush-less DC motor drives. However, it is impossible to detect the rotor position at low-speed by using this technique.
Therefore, the motor must be accelerated by the open loop based synchronous drive up to the middle speed. The open
loop based synchronous drive extremely influences the motor performance. The torque pulsation and the over current
can be occurred by using that.
This paper proposes a new start method for the brush-less DC motors. In this method, the rotor position can be
detected the moment the motor is driven. As a result, the open loop based synchronous drive can be eliminated, rapid
acceleration and high performance of the motor drives are achieved. Effectiveness of the proposed method is shown by
experimental results.
キーワード:ブラシレス DCモータ,センサレス,逆起電力,PWM制御
Keywords: brushless DC motor, sensorless, back electromotive force, PWM control
1. まえがき
ブラシレス DCモータは,メンテナンスフリーでかつ高
効率であるため,OA(Office Automation)機器,空調機器や冷蔵庫のコンプレッサに至るまで幅広く用いられている。一般にブラシレス DCモータは,回転子を永久磁石界磁とし,固定子巻線に交流電流を流してモータ駆動を行うこと
から回転子位置に同期して固定子巻線へ通電する必要がある。回転子位置の検出には,回転子界磁磁束を利用してホール素子等のセンサを用いるものとセンサを用いないセンサレス位置検出方式があるが,コンプレッサ等では,センサ
類を設置することが困難であるためセンサレス位置検出方式を用いている。また,センサレス位置検出方式としては,モータが回転した際に発生する逆起電力を利用したものが
一般的である。
∗(株)日立製作所日立研究所〒319-1292 日立市大みか町 7-1-1Hitachi Research Laboratory, Hitachi, Ltd.1-1, Omika-cho 7-chome, Hitachi 319-1292
∗∗ 日立ホーム &ライフソリューション(株)〒329-4493 栃木県下都賀郡大平町富田 800Hitachi Home & Life Solutions, Inc.800, Tomita, Ohira-machi, Simototsuga-gun, Tochigi-ken 329-4493
近年,静音化を目的に 180度通電正弦波駆動方式での研
究結果が報告されているが,現時点では位置センサレスで正弦波駆動する際には,巻線抵抗,インダクタンス,発電定数等の詳細なモータ定数が必要である (1)~(11)。それに対して,120度通電矩形波駆動は,無通電相に現
れる逆起電力情報を直接利用して回転子位置を検出するため,1)巻線抵抗やインダクタンス等のモータ定数が不要であり汎用性が高い,2)制御部での処理が簡便でモータ電流センサも不要であるため低コストでモータ制御が実現出来
る,3)モータ定数(特に巻線抵抗)の影響を受けず低速度域まで駆動出来る,等の特長がある。そのため,120度通電矩形波駆動は,無通電相に現れる逆起電力情報を利用した様々な回転子位置検出方式が提案・
実用化されており,簡便な駆動方法としてさまざまな分野で利用されている (12)~(24)。一方,逆起電力を利用したセンサレス位置検出方式の問題点として,その原理上,モータが停止している状態では
回転子の位置が検出できないことが挙げられる。この問題に対して,モータ起動時には,特定相に通電することで回転子位置決め処理を行った後,低周波で強制的
に通電相を切替える運転(以下これをオープンループ運転と称する)を行い,モータを回転させて逆起電力による回
電学論 D,126 巻 11 号,2006 年 1531

転子位置情報が得られるようになった後,電圧検出による転流運転(以下これをセンサレス運転と称する)に切替え
るいわゆる低周波同期始動が用いられている (12) (13) (25) (26)。しかしながら,低周波同期始動の問題点として,オープンループ運転中は,回転子位置と無関係に通電しているため,1)印加電圧と加速レイトをモータに合わせて適切に合
わせ込まなければ脱調や起動失敗を起こす。2)広い負荷トルク範囲にわたってモータ電流を適切にする事ができないため起動時の負荷状態によってモータ電流が大きく暴れる。3)電流が大きく暴れることでモータ出力トルクが大きく変
動するため回転速度も大きく変動し,駆動系全体の振動・騒音が発生しやすい,等があげられる。このため,研究成果としてあまり発表されていないが,製品適用する場合,各社,製品に合わせた調整ノウハウがあ
り,調整作業に時間を要するのが起動アルゴリズムである。そこで,本論文では,モータのトルク発生原理に基づき数学的アプローチからブラシレス DCモータの新しい起動方法を提案する。
本論文で提案する新しい起動方法は,前述の従来起動方法における課題の全てを克服すべく考えたものであり,以下の特長を有する。
1)オープンループ運転を省略して,直流位置決め後,直
ちにセンサレス運転へ切り替える。2)直流位置決め後の起動時の通電パターンならびにその通電期間をトルク発生原理と運動方程式から理論的に導出
する。3)電流制御なしでも起動時の負荷トルクに合わせた電流で起動し,その際の電流変動が極力抑えられるように慣性モーメントと発電定数を利用して数学的なアプローチで印
加電圧を決定する。この結果,前述した問題点を全て解決する事ができ始動時の調整作業が大幅に改善でき,調整作業が少なく,かつ起動失敗の起きにくいモータ起動が実現できる。
本論文では,まず始めに新起動方法の原理について説明し,シミュレーションならびにモータ実機試験を用いてその有効性を示す。
2. センサレス制御システムの構成
〈2・1〉 システム構成 図 1は,本論文に用いたモータ駆動システムの構成図である。本システムは,モータ端子電圧と基準電圧から回転子位置検出を行うもので,過電
流保護用の直流電流検出抵抗は設けているものの回転子位置検出のための磁極センサもモータ電流センサも設けていない。つまり,最も簡易で安価に構成されたセンサレス制御システムである。
〈2・2〉 センサレス位置検出方式 本論文で対象とするセンサレス位置検出方式は,120度通電期間の前後に存在する無通電相に回転子の位置情報に対応する逆起電力が現
れることを利用する一般的な方法で,モータ端子電圧と基準電圧との比較から回転子位置を検出するものである (3) (4)。
図 1 センサレス制御システムの構成
Fig. 1. Configuration of the sensorless control system.
図 2 回転子位置の検出タイミングFig. 2. Detection timing of rotor position.
図 1中に示した位置検出回路は,モータ端子電圧と基準
電圧を比較する回路であり,回転子位置検出するタイミングは,図 2に示すようにモータ端子電圧が基準電圧と交差する点に相当する。この位置検出方式の特徴は,無通電相においてその相の
逆起電力がゼロになる回転子位置を検出するもので,位置検出する無通電相と次回転流する相が同一で,かつ検出した回転子位置は,1/3π毎に発生する各相の逆起電力が交差する点の回転子位置に対して電気角で約 30度分ずれた位
置に相当する点にある。また,その後の転流動作は,この検出した時刻に対して電気角で約 30度に相当する時間だけ後に行う。(なお,転流動作と逆起電力との関係は,次章図 5を参照。)
したがって,位置決め後の強制的な転流動作の後に,1度無通電相における回転子位置を検出することができれば,その無通電相の回転子位置検出情報を基にして次回の転流から回転子位置に応じた転流動作が可能となる。
3. 新起動法の概要
〈3・1〉 新起動法の概要 本論文で提案する新起動法は,オープンループ運転を省略し,前述のセンサレス位置
検出方式の特徴を活かして位置決め直後の転流でモータが回転する際に発生する逆起電力情報を迅速に検出し,位置検出信号に基づいたブラシレス運転を行うものである。しかしながら,オープンループ運転を省略するだけでは,
コンプレッサ等における不定な負荷トルク条件や逆起電力の発生によるモータ電流減少の影響のもとでは出力トルク
1532 IEEJ Trans. IA, Vol.126, No.11, 2006

ブラシレス直流モータの新起動法検討
不足が生じるため確実なモータ起動が困難である。これを解決するために,起動時の通電パターンと印加電
圧の制御に着目して検討を行った。以下,具体的に通電パターンと印加電圧の制御方法について示す。
〈3・2〉 通電パターン 図 3は,本方式の位置決めを含めた通電パターンと印加電圧の変化を模式的に示した図で
ある。また,本方式と従来の低周波同期始動時の通電モードの違いがわかるように図 4に低周波同期始動法における通電モードを示す。ここで,図 3および図 4は,上アームをU+,下アームをV−に通電して位置決めした際の起動時の通電パターンで示した。図 4に示す低周波同期始動法が転流間隔を徐々に小さくしていくことに対して,本方式の通電パターンの特徴は,図 3に示すように位置決め後の最初の転流期間 t2が短いと
ころにある。また,センサレス運転への切替えについても,低周波同期始動法がオープンループ運転によって転流動作を繰り返し行うものに対して,本方式は,位置決め後,2回目の通電期間中(図 3中 t3 期間)に迅速にセンサレス運転
へと切替える。なお,図 3中の t3期間以降はセンサレス運転であり,その通電期間は,負荷によって変化することから破線で表した。次に上記の転流期間 t2を短くする理由について説明する。
表面磁石型モータ(リラクタンストルクなし)でのモータ出力トルク τm は,電気角 120度分位相がずれた各相に流れる電流に依って発生するトルク成分 τu,τV,τW の三相分の和であり,回転子位置に対する磁束分布を正弦波と
図 3 新起動法の通電パターンと印加電圧の変化Fig. 3. Switching pattern of the proposed start methodand applied phase voltage.
図 4 低周波同期始動の通電パターンと印加電圧の変化(従来)
Fig. 4. Switching pattern of conventional start methodand applied phase voltage.
し,その波高値を三相全て同じとすると,トルク定数 Kτと各相の電流 iu,iV,iW,回転子位置 θ を使って (1)式から
算出できる。
τm = τu + τv + τw
= Kτ
(iu · sin θ+iv · sin
(θ− 2
3π
)+iw · sin
(θ+
23π
))
· · · · · · · · · · · · · · · · · · · · (1)
ここで,τm はモータ出力トルク,τu,τV,τW は U,V,W各相の出力トルク,Kτ はトルク定数,iu,iV,iW は U,
V,W各相のモータ電流,θは回転子位置である。説明のため,図 5に回転子位置に対するブラシレス DC
モータ駆動時の逆起電力と通電モードとの関係を示す。一般的に 120度通電で駆動する場合,モータ出力トルクを有
効に活用するために,図 5に示すように隣接する相逆起電力が交差する点において通電モードを切替える。他方,位置決め動作における回転子位置について考える。図 3 および図 4 に示すように,位置決め期間にて U→V
に通電した場合,各相のモータ電流の収束値は,それぞれiu = −iV,iW = 0である。また,位置決め後は,回転子位置が固定される状態であることから,モータ出力トルク(回転トルク)τmはゼロの状態である。この 2つの条件を満た
す回転子位置 θが位置決め後の回転子位置となる。この条件を満足する回転子位置 θを求める。(1)式に対してU→V
に通電した場合の電流収束値を代入すると次式が得られる。
τm = Ke · |iu| ·√
3 cos(θ − π
3
)· · · · · · · · · · · · · · · · · · · (2)
上式から,U→V通電における位置決め後の停止位置は,
出力トルクが 0となる θで,磁極方向を考慮して θ = 5/6π
の近傍になる。この回転子位置において,最もモータ出力トルクが得られる通電モードは,(1)式および図 5からU→W通電とV→W
通電であることがわかる。低周波同期始動においても図 4に示すように位置決め後の通電モードは,U→W通電としているが,モータが回転
し,回転子位置が変化するにしたがってモータ出力トルクτmが減少していく。軽負荷の場合では,さらに回転子位置が変化し,出力トルクが負になる。
図 5 回転子位置と通電パターンFig. 5. Rotor position and switching patterns.
電学論 D,126 巻 11 号,2006 年 1533
このため,回転子位置が変化してもモータ出力トルクが減少しない V→W通電の方がよい。しかし,U→V通電から
V→W通電へ切替えるとモータ電流が連続しない。これらのことを考慮して,短期間だけ U→W通電した後,V→W
通電する通電パターンが,モータ電流を円滑に転流すると共にモータ出力トルクを最大限に得ることができる通電パ
ターンとなる。通電期間については後項〈3・4〉項で述べる。〈3・3〉 印加電圧の制御 次に,電流制御系を持たない本制御系における印加電圧の制御について述べる。前述し
た通電パターンによって,モータが回転を始めると同時に逆起電力が発生する。この逆起電力は回転速度によって変化し,その瞬時値は回転子位置によっても変化する。U→V
通電による位置決め後の動作について述べると,その停止
位置 θ = 5/6πに対してモータ始動時は,回転速度が急激に増加すると共に図 5に示すように 5/6πから回転子位置が変化するため,V→W通電である線間逆起電力(ev − ew)が増加する方向へと働く。
一方,モータ電流は,印加電圧が一定のとき,逆起電力が大きくなると共に減少していく。モータ電流が減少すると (1)式からもわかるように,モータ出力トルクが減少し
てしまう。モータ電流センサが設けられていれば電流制御する事で対応できるが,本システムにはモータ電流センサがない。そこで,本方式では,モータ電流の減少を抑制してモー
タ出力トルクの低下を防ぐために,逆起電力の大きさに合わせて印加電圧を制御することを考えた。しかし,対象としている制御装置では,瞬間的な回転速度や回転子位置が検出できないため,これらを始動時の角加速度から見積も
ることにした。モータ回転時の運動方程式は (3)式で表される。
τm − τL = J · dωm
dt+ bm · ωm · · · · · · · · · · · · · · · · · · · · (3)
なお,τm はモータ出力トルク,τL は負荷トルク,ωm は角速度,J は慣性モーメント,bm は動摩擦係数である。
ここで,動摩擦係数が,負荷トルクに対して小さく無視できるものとして角加速度 dωm/dtを αで表すと,始動時の角加速度 αは,位置決め直後の電流で転流することによって決まるモータ出力トルク τm,慣性モーメント J,負荷トル
ク τL から (4)式を用いておおよそ見積もることができる。
α =τm − τL
J· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·(4)
始動時の角速度 ωm は,位置決め直後を t = 0とすると,
経過時間 tに対して (5)式から計算できる。
ωm = α · t · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (5)
また,その時の回転子位置 θは,t = 0における位置決め
直後の回転子位置を 5/6πとすると,角加速度 α,経過時間tを用いて (6)式から見積もることができる。
θ = α · t2 +56π · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (6)
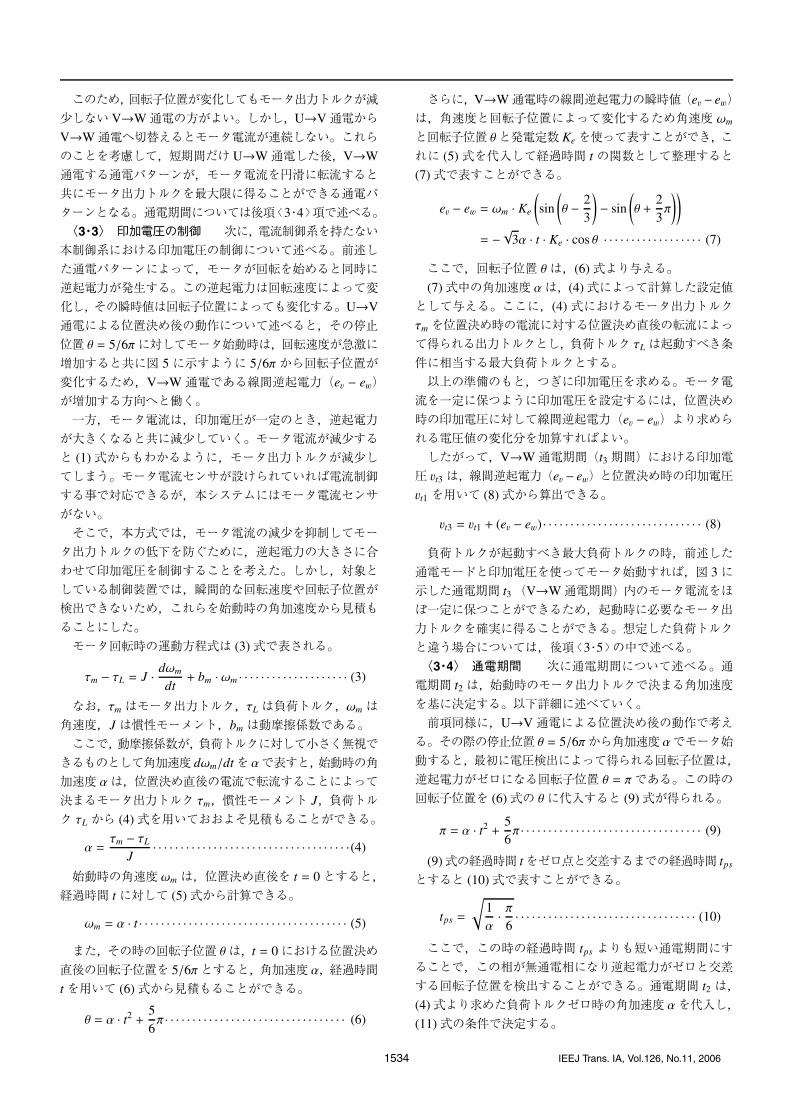
さらに,V→W通電時の線間逆起電力の瞬時値(ev − ew)は,角速度と回転子位置によって変化するため角速度 ωm
と回転子位置 θと発電定数 Keを使って表すことができ,これに (5)式を代入して経過時間 t の関数として整理すると(7)式で表すことができる。
ev − ew = ωm · Ke
(sin
(θ − 2
3
)− sin
(θ +
23π
))
= −√3α · t · Ke · cos θ · · · · · · · · · · · · · · · · · · (7)
ここで,回転子位置 θは,(6)式より与える。
(7)式中の角加速度 αは,(4)式によって計算した設定値として与える。ここに,(4) 式におけるモータ出力トルクτmを位置決め時の電流に対する位置決め直後の転流によって得られる出力トルクとし,負荷トルク τLは起動すべき条
件に相当する最大負荷トルクとする。以上の準備のもと,つぎに印加電圧を求める。モータ電流を一定に保つように印加電圧を設定するには,位置決め時の印加電圧に対して線間逆起電力(ev − ew)より求めら
れる電圧値の変化分を加算すればよい。したがって,V→W通電期間(t3 期間)における印加電圧 vt3は,線間逆起電力(ev − ew)と位置決め時の印加電圧
vt1 を用いて (8)式から算出できる。
vt3 = vt1 + (ev − ew) · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (8)
負荷トルクが起動すべき最大負荷トルクの時,前述した通電モードと印加電圧を使ってモータ始動すれば,図 3に示した通電期間 t3(V→W通電期間)内のモータ電流をほぼ一定に保つことができるため,起動時に必要なモータ出
力トルクを確実に得ることができる。想定した負荷トルクと違う場合については,後項〈3・5〉の中で述べる。〈3・4〉 通電期間 次に通電期間について述べる。通電期間 t2 は,始動時のモータ出力トルクで決まる角加速度
を基に決定する。以下詳細に述べていく。前項同様に,U→V通電による位置決め後の動作で考える。その際の停止位置 θ = 5/6πから角加速度 αでモータ始動すると,最初に電圧検出によって得られる回転子位置は,
逆起電力がゼロになる回転子位置 θ = πである。この時の回転子位置を (6)式の θに代入すると (9)式が得られる。
π = α · t2 +56π · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (9)
(9)式の経過時間 tをゼロ点と交差するまでの経過時間 tps
とすると (10)式で表すことができる。
tps =
√1α· π
6· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (10)
ここで,この時の経過時間 tps よりも短い通電期間にすることで,この相が無通電相になり逆起電力がゼロと交差する回転子位置を検出することができる。通電期間 t2 は,
(4)式より求めた負荷トルクゼロ時の角加速度 αを代入し,(11)式の条件で決定する。
1534 IEEJ Trans. IA, Vol.126, No.11, 2006
ブラシレス直流モータの新起動法検討
t2 < tps · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (11)
一方,通電期間 t3 は,逆起電力情報を基にして転流するため始動時の負荷トルク条件に依って変化する。始動時の負荷トルク τLが (4)式で角加速度 αを算出する
際の負荷トルクと一致する場合には,(9)式と同様に (12)
式から見積もる事ができる。
76π = α · t2 +
56π · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (12)
(12)式から θ = 7/6πまで回転子位置が変化するまでの経過時間 tを経過時間 tdrvとすると (13)式で表す事ができる。
tdrv =
√1α· 2
6π · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (13)
(13)式の経過時間 tdrv は,位置決め後の経過時間であるため通電期間 t2 と t3 を使って表すと (14)式で表す事がで
きる。
tdrv = t2 + t3 · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (14)
したがって,実際の始動時負荷トルクが角加速度 αを算
出した際の負荷トルク以下の場合には,想定した角加速度よりも大きいため通電期間 t3 は通電期間 t2 を含めて (15)
式の関係となる。
t3 ≤ tdrv − t2 · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · (15)
〈3・5〉 新起動法の特徴 本方式には次に示すような特徴がある。( 1) 始動時からモータの出力トルク特性を最大限に活
用できるため,迅速な回転速度の立ち上げが可能である。( 2) 起動時におけるモータの振動を低減できる。( 3) 負荷トルクに応じたモータ電流で起動できる。その理由について,それぞれ以下に述べていく。
( 1)に対して,本方式は,位置決め通電して回転子位置を固定した後,この回転子位置に適した通電モードへ転流し,迅速にセンサレス運転へ移行するため,始動の時から回転子位置に応じた転流動作が実現できる。このため,始
動時からブラシレス DCモータとしてのモータ特性を最大限に活用することができ,迅速に回転速度を立ち上げることが可能である。( 2)に対しては,本方式は,始動時から回転子位置に応
じた転流を実現するため,回転子位置と無関係に転流していたオープンループ運転と比べて,モータ出力トルクの変動を大幅に低減することができる。また,( 3)については次の通りである。〈3・3〉項で述べ
たように,本方式では,起動すべき負荷トルクの上限値を用いて印加電圧を設定した場合,その負荷トルクにおいてはモータ電流を所望の大きさに保ちながら起動する。これに対して,負荷トルクが想定した負荷トルクの上限
値よりも小さい場合には,角加速度 αが設定した値よりも大きくなる。その結果,回転速度の変化が計算値よりも大
きくなるため逆起電力も大きくなり,モータ電流が減少する。しかし,回転速度が大きくなるということは,起動に
必要なモータ出力トルクが得られていると同時にセンサレス運転に必要な逆起電力が得られることを意味する。つまり,始動毎に負荷トルクが変化しても起動すべき範囲で確実にモータ起動ができる。それと同時に,モータ電流が負
荷トルクの大きさに比例するため効率よくモータ起動することができる。一方,想定した負荷トルクよりも大きい場合を考えると,角加速度 αが設定値よりも小さくなる。その結果,回転速
度の変化が計算値よりも小さくなるため,逆起電力も小さくなりモータ電流が増加する方向へと働く。モータ電流が増加したことによってモータ出力トルクも増加する。よって,計算に用いた負荷トルクよりも実際の負荷トルクが大
きい場合でも,インバータの過電流レベルに達することなく,かつ回路仕様としてモータ端子電圧と基準電圧との比較結果が確実に得られればモータ起動できる。つぎに,本方式の動作をシミュレーションおよびモータ
実機運転により確認した。その内容について述べていく。
4. シミュレーション検討
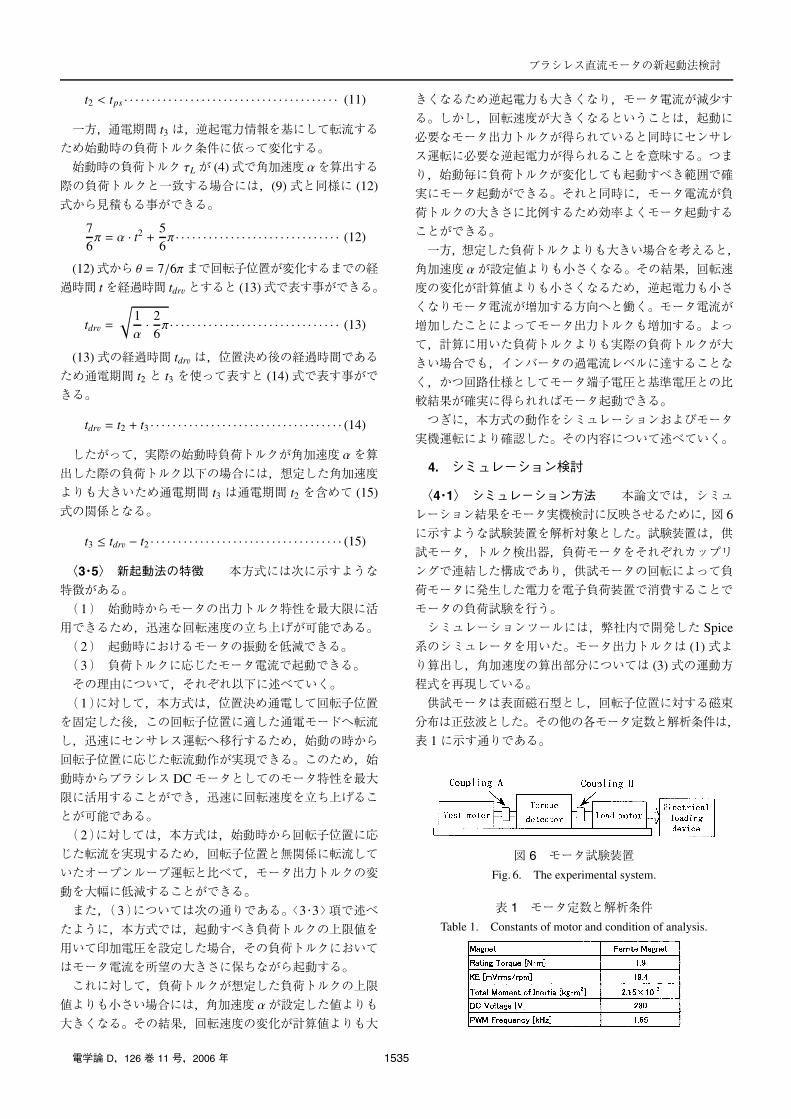
〈4・1〉 シミュレーション方法 本論文では,シミュ
レーション結果をモータ実機検討に反映させるために,図 6
に示すような試験装置を解析対象とした。試験装置は,供試モータ,トルク検出器,負荷モータをそれぞれカップリ
ングで連結した構成であり,供試モータの回転によって負荷モータに発生した電力を電子負荷装置で消費することでモータの負荷試験を行う。シミュレーションツールには,弊社内で開発した Spice
系のシミュレータを用いた。モータ出力トルクは (1)式より算出し,角加速度の算出部分については (3)式の運動方程式を再現している。供試モータは表面磁石型とし,回転子位置に対する磁束
分布は正弦波とした。その他の各モータ定数と解析条件は,表 1に示す通りである。
図 6 モータ試験装置
Fig. 6. The experimental system.
表 1 モータ定数と解析条件Table 1. Constants of motor and condition of analysis.
電学論 D,126 巻 11 号,2006 年 1535

(a) Motor output torque, Rotational speed, Applied voltage
(b) Voltage of terminal, Back EMF, Direct current
図 7 新起動法シミュレーション結果(負荷トルク:定格比 50%)
Fig. 7. Simulation result of the proposed method. (Loadtorque:50%).
また,印加電圧制御のために想定した負荷トルクの上限値は,定格比 50%トルクとした。その他,印加電圧の制御は PWM(Pulse Width Modulation)制御とし,チョッパ方
式は前半 60度チョッパ方式とした。一方,負荷モータの慣性モーメントは供試モータと同等であるが,実際のコンプレッサの慣性モーメントは本モータ試験装置の負荷モータに対して 1ケタ程小さい。そのた
め,慣性モーメントの大きさに関してはモータ単体での条件がコンプレッサにおける条件に近い。また,起動時のモータ電流が同じであればモータ出力トルクは同じであるため,慣性モーメントが小さい方が角加速度が大きい。そのため,
本モータ試験装置での動作に比べて,起動時の回転速度が大きく逆起電力が大きくなるため,センサレス運転に必要な電圧検出には有利にはたらくことから,モータ単体およ
びモータ試験装置の条件下で起動ができれば,実際のコンプレッサでも起動できると考えられる。そこで,シミュレーションおよび実機検証条件にモータ単体と本モータ試験装置を選んだ。
〈4・2〉 シミュレーション結果 図 7は負荷トルク定格比 50%条件,図 8はモータ単体条件におけるシミュレーション結果である。それぞれ図 7(a)および図 8(a)は,モー
タ出力トルク,推定速度,回転速度,印加電圧で,図 7(b)
および図 8(b)は,U相端子電圧,U相逆起電力,直流電流である。ここで,推定速度とは,印加電圧を算出する際に負荷トルク定格比 50%を想定して算出した角加速度を基に
推定した回転速度である。また,比較のために図 9に同様の負荷条件において低周波同期始動法で起動した場合のシ
(a) Motor output torque, Rotational speed, Applied voltage
(b) Voltage of terminal, Back EMF, Direct current
図 8 新起動法シミュレーション結果(負荷トルク:モータ単体)
Fig. 8. Simulation result of the proposed method. (Loadtorque: Motor simple substance)
(a) Motor output torque and rotational speed (Load torque 50%)
(b) Motor output torque and rotational speed (Motor simple substance)
図 9 低周波同期始動法のシミュレーション結果(従来)
Fig. 9. Simulation result of conventional start method.
ミュレーション結果を示す。
まず,図 7(a)および図 8(a)から負荷トルク定格比 50%およびモータ単体の両条件において,モータ回転速度が増加していくことから,本方式で起動できることが確認できる。また,モータ出力トルクが,負の値をとらずに負荷の大小
に応じた正の値となっていることから,負荷条件が違う場合でも回転子位置に適したタイミングで転流していること
1536 IEEJ Trans. IA, Vol.126, No.11, 2006

ブラシレス直流モータの新起動法検討
(a) Load torque 50%
(b) Motor simple substance
図 10 実験結果
Fig. 10. Experimental result.
が確認できる。これは,図 9の低周波同期始動法のモータ出力トルクと比較すると顕著な差であり,本方式ではモー
タ出力トルクの変動が少なく,起動時の振動が大幅に低減できると考える。さらに,図 7(b)の直流電流に着目すると,図中 t3期間で電流値をほぼ一定に保ちながら通電していることが確認で
きた。また,図 8(b)から負荷トルクが小さい場合は,推定速度よりも回転速度の方が大きくなり,起動時のモータ電流を抑制できることも確認できた。これにより,負荷の大きさに合わせて,起動時の電流が決まることが確認できた。
5. 実機検討
〈5・1〉 実験方法 本方式の有効性について,モータ実機を用いて検討を行った。以下にその実験方法と実験結
果について説明する。モータ実機検討には,シミュレーション同様のモータ試験装置を用いた。供試モータ及び負荷条件は,シミュレーションと同じである。
〈5・2〉 実験結果 図 10は,負荷トルク定格比 50%と
モータ単体での各信号波形である。図中の波形は,上から順に V相モータ端子電圧,V相モータ電流である。図 10(a)の結果からシミュレーション同様,定格比 50%のときは始動時のモータ電流をほぼ一定に保ちながら起動す
ることが確認できた。また,図 10(b)のモータ単体条件では,少ない電流で起動できることからシミュレーション同様に負荷トルクの大きさに応じてモータ電流が変わることも確認できた。
さらに,位置決め終了からセンサレス運転による転流までの時間は,シミュレーション結果と同様に負荷トルクに応じ
て変化することが確認できた。また,その経過時間(t2+ t3)は負荷トルク定格比 50%時は約 36 msで,モータ単体にお
いては約 19 msと迅速にセンサレス運転へ移行する事を確認した。
6. ま と め
逆起電力を用いた 120度通電形の位置センサレスブラシレス DCモータにおいて,新しい起動法について検討を行い,以下の結論を得た。( 1) オープンループ運転を省略し,位置決め後の通電
パターンと印加電圧を適切に決定することで,迅速にセンサレス運転へ移行し,始動時からモータの出力特性を最大限に活用する新しい起動法を提案した。
( 2) 始動時から回転子位置に応じた転流が可能である
ため,起動時の負荷トルクに応じたモータ電流で起動できることをシミュレーション及びモータ実機運転で確認した。
以上より,本提案方式では,負荷に応じた最小電流での
起動及び起動時における振動の低減ができると考える。また,センサレス運転へ迅速に移行するため,高速立ち上げが必要な用途にも適応可能であると考える。(平成17年10月31日受付,平成18年5月30日再受付)
文 献
( 1) S. Miyazaki, H. Watanabe, and T. Fujii: “A Rotor Position Detecting Methodof Permanent Magnet Synchronous Motor.II”, Proc. of the 1988 Japan In-dustry Applications Society Conference, p.435 (1988) (in Japanese)宮崎 聖・渡辺博巳・藤井知生:「永久磁石界磁同期電動機の回転子位置検出法 II」,平元電学産業応用部門全大会, 105, p.435 (1988)
( 2) H. Watanabe, M. Okada, H. Katushima, and T. Fujii: “Sensorless DC Speed-Servo System using Torque Observer”, Proc. of the 1988 Japan IndustryApplications Society Conference, p.191 (1989) (in Japanese)渡辺博巳・岡田昌也・勝島秀行・藤井知生:「トルクオブザーバを用いたセンサレス DC 速度サーボシステム」,平 2 電学産業応用部門大, 45, p.191 (1989)
( 3) T. Takeshita, M. Ichikawa, N. Matsui, E. Yamada, and R. Mizutani: “InitialRotor Position Estimation of Sensorless Salient-Pole Brushless DC Motor”,T. IEE Japan, Vol.116-D, No.7 (1996-7) (in Japanese)竹下隆晴・市川 誠・松井信行・山田英治・水谷良治:「センサレス突極形ブラシレス DC モータの初期位置角推定法」,電学論 D, 116, 7(1996-7)
( 4) T. Senjyu, N. Urasaki, and K. Uezato: “Vector Control of Brushless DC Mo-tors without Position and Speed Sensors Based on Instantaneous Power”,1996 National Convention Record, IEE Japan, p.4-288 (1996) (in Japanese)千住智信・浦崎直光・上里勝実:「瞬時電力に基づくブラシレス DCモータの位置・速度センサレスベクトル制御」,平 8 電学全大, 899,p4-288 (1996)
( 5) T. Hanamoto, T. Tsuji, K.-B. Park, Y. Tanaka, and H. Hara: “Positionand Speed Sensorless Control of BLDCM Applying the Modified InducedVoltage Observer”, 1998 National Convention Record, IEE Japan, p.4-284(1998) (in Japanese)花本剛士・辻 輝生・朴 康博・田中良明・原 英博:「拡張誘起電圧オブザーバを用いた BLDCMの位置・速度センサレス制御」,平 10電学全大, 885, p.4-284 (1998)
( 6) A. Sumiya, A. Usui, T. Takeshita, and N. Matsui: “Parameter Estimationof Salient-Pole PMSM”, 1996 National Convention Record, IEE Japan, p.4-471 (1996) (in Japanese)角谷敦之・臼井 明・竹下隆晴・松井信行:「突極形 PMSM のパラメータ推定法」,平 11 電学全大, 1021, p.4-471 (1999)
( 7) Z. Chen, M. Tomita, S. Doki, and S. Okuma: “An Extended E.m.f. Observerfor Salient-Pole Brushless DC Motor’s Sensorless Control”, 1996 NationalConvention Record, IEE Japan, p.4-480 (1996) (in Japanese)
電学論 D,126 巻 11 号,2006 年 1537

陳 志謙・冨田睦雄・道木慎二・大熊 繁:「突極型ブラシレス DCモータのセンサレス制御のための拡張誘起電圧オブザーバ」,平 11電学全大, 1026, 4-480 (1999)
( 8) K. Sakamoto, Y. Iwaji, and T. Endoh: “A New Position Sensorless Controlof Interior Permanent Magnet Syncronous Motor using Direct Position ErrorEstimation”, Record of IEE Japan Symposium, SPC-00-67/IEA-00-42123,p.73 (2000-11) (in Japanese)坂本 潔・岩路善尚・遠藤常博:「軸誤差の直接推定演算による IPMモータの位置センサレス制御」,半導体電力変換・産業電力電気応用合同研資, SPC-00-67/IEA-00-42123, p.73 (2000-11)
( 9) K. Sakamoto, Y. Iwaji, and T. Endo: “A Simplified Vector Control for Po-sition Sensorless Permanent Magnet Synchronous Motor Drives”, Proc. ofthe 2001 Japan Industry Applications Society Conference, No.248 (2001)(in Japanese)坂本 潔・岩路善尚・遠藤常博:「位置センサレス永久磁石同期電動機の簡易ベクトル制御」,平 13 電学産業応用部門大, No.248 (2001)
(10) Y. Kawabata, T. Endo, and T. Yuhachi: “Study of Control for Position Sen-sorless and Motor Current Sensorless Permanent Magnet Syncronous MotorDrives”, Proc. of the 2002 Japan Industry Applications Society Conference,No.171 (2002) (in Japanese)川端幸雄・遠藤常博・高倉雄八:「位置センサレス・モータ電流センサレス永久磁石同期モータ制御に関する検討」,平 14 電学産業応用部門大, No.171 (2002)
(11) 川端幸雄:「商品化ベースでのセンサレス制御技術」, 2003 モータ技術シンポジウム, B2-3 (2003)
(12) T. Endo, F. Tajima, K. Iizuka, and H. Uzuhashi: “Brushless Motor with-out a Shaft-Mounted Position Sensor”, T. IEEE Japan, Vol.105, No.1/2, p.1(1985)
(13) K. Iizuka, H. Uzuhashi, M. Kano, T. Endo, and K. Mohri: “MicrocomputerControl for Sensorless Brushless Motor”, IEEE Trans. Industry Applica-tions, Vol.IA-21, pp.595–601 (1985-5/6)
(14) N. Matsui: “Control Topics of Brushless Motor with Permanent MagnetRotor”, Proc. of the 1988 Japan Industry Applications Society Conference(1988) (in Japanese)松井信行:「S.3-4 永久磁石形ブラシレス DC モータの制御上の諸問題」,電学産業応用部門全大 (1988)
(15) 長竹和夫:「センサレスブラシレス DCモータ駆動の動向」,小形モータ技術シンポジウム,日本能率協会 (1990)
(16) 新倉英生:「VTR 用モータのセンサレス化技術」,小形モータ技術シンポジウム,日本能率協会 (1990)
(17) 八十原正浩:「全波駆動ブラシレスモータのセンサレス化技術」,第9 次小形モータ技術フォーラム,日本能率協会 (1990)
(18) 谷本茂也:「エアコン・コンプレッサ用ブラシレス DC モータ」,モータ技術シンポジウム C5-1-1 (1994)
(19) 谷本茂也:「AC モータ,DC モータ低消費電力技術」,第 13 次モータ技術フォーラム (1995)
(20) K. Akiyama, F. Takafumi, T. Katsumi, and O. Yuji: “Inverter Control ofA Super High Speed PM Motor”, 1996 National Convention Record, IEEJapan, p.4-274 (1996) (in Japanese)秋山和成・深田隆文・寺内勝実・大堀勇二:「超高速永久磁石式電動機のインバータ制御」,平 8 電学全大, 892, p.4-274 (1996)
(21) M. Yoshida, Y. Murai, and M. Takada: “Noise Reduction for Brushless DCMotor”, RM-97-108 (1997) (in Japanese)吉田昌春・村井由宏・高田昌亨:「ブラシレスモータの騒音低減に関する研究」,回転機研究会, RM-97-108 (1997)
(22) S. Tanimoto, K. Nagai, and T. Sekihara: “A Method Reducing noise level inbrushless DC motors for fan Motors”, RM-98-150 (1998) (in Japanese)谷本茂也・永井一信・関原総一:「ブラシレス DC モータの低騒音化の一手法」,回転機研究会, RM-98-150 (1998)
(23) 川端幸雄:「ブラシレス DC モータの制御」,モータ技術シンポジウム,日本能率協会 (1999)
(24) K. Hamaoka, T. Ouhiyama, H. Ogahara, and A. Koda: “High efficiencydriving method of the motor with concentrated windings for the refrigera-tion compressor”, JSPE-26-16 (2000) (in Japanese)浜岡孝二・大内山智則・小川原秀治・甲田篤志:「冷蔵庫コンプレッサ用集中巻モータの高効率駆動方式」,パワーエレクトロニクス研究会, JSPE-26-16 (2000)
(25) 谷本茂也:「ブラシレス DC モータのセンサレス化駆動の一方法」,電学回転機研, RM-91-30 (1991)
(26) H. Ogahara, K. Ogawa, K. Hamaoka, and T. Nyuji: “Control for Startingof Recipro Compressor Inverter System Using Brushless DC Motor”, 1996National Convention Record, IEE Japan, p.4-289 (1996) (in Japanese)小川原秀治・小川啓司・浜岡孝二・入路友明:「ブラシレス DC モータを用いたレシプロコンプレッサ・インバータシステムの起動制御方式」,平 8 電学全大, 900, p.4-289 (1996)
川 端 幸 雄 (正員) 1966 年 11 月 4 日生。1985 年 3 月長崎
県立長崎工業高校卒。同年 3月(株)日立製作所
入社。日立研究所所勤務。回転機の制御に関する
研究に従事。現在,同所研究員。
遠 藤 常 博 (正員) 1949 年 3 月 26 日生。1974 年 3 月修士
課程修了。同年 4月(株)日立製作所入社。回転
機械の制御に関する研究に従事。現在,同所主任
研究員。
高 倉 雄 八 (非会員) 1964年 9月 8日生。1989年 3月鹿児
島大学工学部卒。同年 4月(株)日立製作所入社。
インバータ開発に従事。2000 年日立ホーム &ラ
イフソリューション(株)転属。2004 年退職。
石 井 誠 (非会員) 1943 年 6 月 20 日生。1962 年東京都
立羽田工業高校卒。1962年(株)日本コロンビア
入社,1970 年(株)日立製作所へ入社。1999 年
日立ホーム &ライフソリューション(株)転属。
2002年(株)日立栃木エレクトロニクス入社,イ
ンバータ回路,パワーモジュールの開発に従事。
現在,同社技術主幹。
1538 IEEJ Trans. IA, Vol.126, No.11, 2006