stratégie de gestion d'énergie optimale pour un véhicule ... fonseca.pdf · stratégie de...
TRANSCRIPT

Stratégie de gestion d'énergie optimale pour unvéhicule hybride à pile à combustible
Ramon da Fonseca∗, Eric Bideaux∗, Mathias Gerard ∗∗, BrunoJeanneret∗∗∗, Matthieu Desbois-Renaudin ∗∗, Ali Sari∗
∗Lab. Ampère, ∗∗ CEA\LITEN\DEHT\LIGE, ∗∗∗ IFSTTAR
19 Jan, 2012

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
ContexteEtat de l'art et problématiqueObjectifs
Contexte
Des innovations technologiques pour ce qui concerne le véhiculeparticulier et l'usage qui en est fait.
L'utilisation de motorisation non conventionnelle, non émettricede GES (Gaz à E�et Serre).
Véhicules électriques (batteries).Véhicules hybrides à pile à combustible hydrogène PEMFC.
2/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
ContexteEtat de l'art et problématiqueObjectifs
Etat de l'art et problématique
Projet Véhicule Machine élec PAC BATT Li-Ion Date
FiSyPAC (PSA/CEA) 207 cc 70 kW 17 kW 13 kWh 2006
Hyundai Tucson 80 kW 80 kW 10 kWh 2004
Machine
électrique
Réducteur
=
=
batterie
Aux
élec
3/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
ContexteEtat de l'art et problématiqueObjectifs
Objectifs
Optimisation de la gestion d'énergie d'un véhicule PAC, sujet à des
contraintes dynamiques.
Etapes
Dé�nition du véhicule de référence et de la chaine de traction
du véhicule.
Modélisation du système PEMFC et système de stockage.
Optimisation de la gestion énergétique du véhicule.
Implémentation des méthodes d'optimisation
4/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Véhicule de référenceDé�nition de la traction électrique
Dé�nition du véhicule et de la chaine detraction
5/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Véhicule de référenceDé�nition de la traction électrique
Véhicule de référence
Renault Clio 1,5 dCi (Desbois-Renaudin et al. 2004[1]).
modèle masse (kg) n. rapport acc. 0/100 km/h (s) vitesse maxi (km/h)
Clio 1,5 dCi 780 5 12,2 176
6/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Véhicule de référenceDé�nition de la traction électrique
Dé�nition traction électrique
Cahier des charges basé sur le � Partnership for a New Generation ofVehicles � (PNGV) (Moore et al 2000[2]).
Machine électrique synchrone.
Puissance maximale machine : 42 kWReducteur : kred= 3,43 (ηred = 97%).
7/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Système pile à combustibleBatteries
Modélisation du système PAC et desBatteries
8/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Système pile à combustibleBatteries
PAC
Type PEMFC (Proton Exchange Membrane Fuel Cell).
Electrode
Electrolyte (solide)
Plaque Bipolaire
Couche de diffusion
e-
H+
ANODE CATHODE
9/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Système pile à combustibleBatteries
PAC
Modèle expérimental CEA .
Vcell = f (pcath, pan, stO2 , Hr , T , i).
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80.5
0.6
0.7
0.8
0.9
1
Densité de courant (A/cm2)
Ten
sion
de
cellu
le (
V)
Courbe de polarisation pour des différentes pressions
1,3 bar1,5 bar2,0 bar
10/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Système pile à combustibleBatteries
Système PAC
Le fonctionnement de la PAC dépend fortement des auxiliaires et desconditions imposées à la pile.Modèles dynamiques et quasi-statiques des éléments du système.
11/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Système pile à combustibleBatteries
Dynamique du système PAC : groupe d'air
SCompresseurr
groupe d'air
Pile à combustible
Air (O2+N2)+H2O
Capacité Cathode
O2 Pile H2O
N2
Débit
compresseur
Commande
Vanne
Vanne regul. press.
12/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Système pile à combustibleBatteries
Modèle dynamique du groupe d'air
Moteurdicomp
dt= 1
Lq(ucomp − ψdωcomp − Rq icomp),
dωdt
= 1
J(τ − Cr − βω)
Compresseur
Π=pcathpatm
, qcomp=ωpcathRTatm
cyl2π ηv (Π,ω)
Cr=pcathR
cyl2π cpair
cylηisηv (Π,ω)
(Πγ−1γ −1
)
Capacité de la cathode
dpcathdt
=(qcomp+qH2O−qO2
−qvanne )RT
V
qH2O=Ncell Ipac
2F , qO2=Ncell Ipac
4F
qvanne=Cd .Cm.uvanne .pcath√
T
Cm=
√√√√√√ 2γR(γ−1)
(patmpcath
) 2γ −
(patmpcath
) (γ+1)γ
13/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Système pile à combustibleBatteries
Modèle dynamique du groupe d'air
Système non linéairedicomp
dt= k1ucomp − k2icomp − k3ωcomp
dωcomp
dt= k4icomp − k5ωcomp − k6pcath
[( pcath105
) γ−1γ − 1
]dpcathdt
= k9k10ωcomppcath − k9qO2 + k9qH2O − k9k11pcathuvanne
Commande de pcath et de la stoechiométrie d'oxygène (qcomp)
qcomp = f (ωcomp, pcath) = k10ωcomppcath
Entrées : ucomp et uvanne
14/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Système pile à combustibleBatteries
Commande non linéaire linéarisante du groupe d'air
Modèle de commande
Simpli�cation du modèle
Dynamique électrique du moteurRendement volumétrique du compresseur �xeTransport de matière par la membrane non pris en compte par lemodèle de commande
dωcomp
dt= k12ucomp − k5ωcomp − k6pcath
[( pcath105
) γ−1γ − 1
]dpcathdt
= k9k10pcathωcomp − k9qO2 + k9qH2O − k9k11pcathuvanne
15/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Système pile à combustibleBatteries
Commande non linéaire linéarisante du groupe d'air
Variables à commander : qcomp et pcath
Sorties : y1 = ωcomp et y2 = pcath (qcomp = k10y1y2)
Synthèse de la commande :
yd1 = k12ucomp − k5yd1 − k6y
d2
[(yd2105
) γ−1γ
− 1
]
ucomp =
W1+k5yd1 +k6y
d2
( yd2105
) γ−1γ−1
k12
yd2 = k9k10yd1 y
d2 − k9qO2 + k9qH2O − k9k11y
d2 uvanne
uvanne =−W2+k9k10y
d1 y
d2 −k9qO2+k9qH2O
k9k11yd2
yd1 et yd2 sont des consignes de trajectoires désirés
16/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Système pile à combustibleBatteries
Commande non linéaire linéarisante du circuit d'air
Le système après l'application des commandes :yd1 = W1
yd2 = W2
W1 = α(yd1 − ωcomp
)W2 = β
(yd2 − pcath
)� Full linearization �
Stabilité exponentielle
17/31
IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Système pile à combustibleBatteries
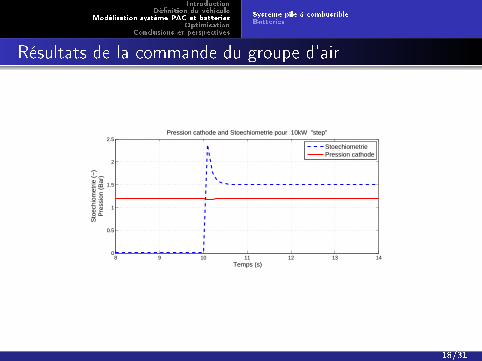
Résultats de la commande du groupe d'air
8 9 10 11 12 13 140
0.5
1
1.5
2
2.5
Temps (s)
Sto
echi
omet
rie (
−)
Pre
ssio
n (B
ar)
Pression cathode and Stoechiometrie pour 10kW "step"
StoechiometriePression cathode
18/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Système pile à combustibleBatteries
Batteries
Batterie Lithium Ion.
Densités d'énergie plus élevées que les autres technologies (Montaru2009[3]).LiFePO4 : coût et sécurité sont les caractéristiques importantes.
Modèle expérimental quasi-statique :
Vbatt = Ebatt (c)− Ri (c,T ) Ibatt (1)
SoE (%) = 100.
(ε
εmax
); ε = −
∫Pbatt .dt; (2)
19/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
GénéralitésFormulation du problème d'optimisationMéthodes d'optimisationRésultats de l'optimisation (cycle NEDC)
Optimisation
20/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
GénéralitésFormulation du problème d'optimisationMéthodes d'optimisationRésultats de l'optimisation (cycle NEDC)
L'architecture hybride série permet de trouver une répartition entre lasource et le système de stockage.
Optimisation de la consommation du véhicule.Contraintes de fonctionnement.
Méthodes d'optimisation (Scordia 2004[4]) :
Heuristiques :
Algorithmes genétiques.
Exactes :
Le principe du maximum de Pontryaguine.Programmation dynamique.
Critère d'optimisation : consommation d'hydrogène
21/31
IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
GénéralitésFormulation du problème d'optimisationMéthodes d'optimisationRésultats de l'optimisation (cycle NEDC)
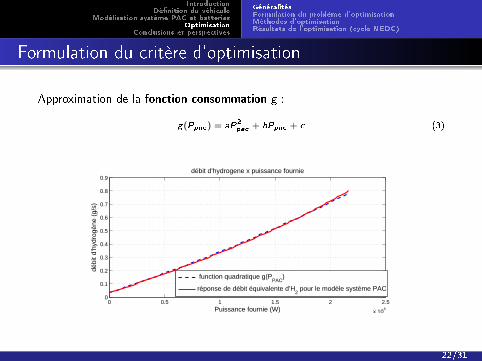
Formulation du critère d'optimisation
Approximation de la fonction consommation g :
g(Ppac ) = aP2pac + bPpac + c (3)
0 0.5 1 1.5 2 2.5
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9débit d’hydrogene x puissance fournie
Puissance fournie (W)
débi
t d’h
ydro
gène
(g/
s)
function quadratique g(PPAC
)
réponse de débit équivalente d’H2 pour le modèle système PAC
22/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
GénéralitésFormulation du problème d'optimisationMéthodes d'optimisationRésultats de l'optimisation (cycle NEDC)
Problème d'optimisation
{ε=f1(Pbatt)=−Pbatt ; ω=f2(W1)=W1; pcath=f3(W2)=W2 (4)
Critere de minimisation: Contraintes:
J(P∗pac)=minP∗pac
∫ tf0 g(Ppac (t)).dt Pbatt min≤Pbatt≤Pbatt max
P∗pac=argminJ(Ppac (t)) Ppac min≤Ppac≤Ppac max
SoEmin≤SoE≤SoEmax
Conditions limites:
SoE(0)=60%=SoE(tf ); pcath(0...tf )=1.2Bar ; StO2 (0...tf )=1.5
(5)
Pbus=Ppac+Pbatt (6)
23/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
GénéralitésFormulation du problème d'optimisationMéthodes d'optimisationRésultats de l'optimisation (cycle NEDC)
Maximum de Pontryaguine [5]
H(ε,ω,pcath,Pbatt ,W1,W2,λ1,λ2,λ3)=g(Pbatt)+λ1f1(Pbatt)+λ2f2(W1)+λ3f3(W2)
H=g(Pbatt)−λ1Pbatt+λ2W1+λ3W2
(7)
ε= ∂H∂λ1
; ω= ∂H∂λ2
; pcath= ∂H∂λ3
−λ1= ∂H∂ε
;−λ2= ∂H∂ω
;−λ3= ∂H∂pcath
∂H∂Pbatt
=0; ∂H∂W1
=0; ∂H∂W2
=0
(8)
∂H∂Pbatt
=0=2aP∗batt
(t)+β(t)−λ1⇒P∗batt
(t)=λ1−β(t)
2a ; β=−(2a(Pbus)+b)
∂H∂W1
=0=λ2= ∂H∂W2
=0=λ3
(9)
Linéarisation => Résolution explicite du problème d'optimisation24/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
GénéralitésFormulation du problème d'optimisationMéthodes d'optimisationRésultats de l'optimisation (cycle NEDC)
Cycle NEDC
0 200 400 600 800 1000 12000
50
100
150
Vite
sse
(Km
/h)
Temps (s)
Cycle NEDC
0 200 400 600 800 1000 1200−20
0
20
40
Pui
ssan
ce e
lect
rique
(kW
)
PuissanceVitesse
25/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
GénéralitésFormulation du problème d'optimisationMéthodes d'optimisationRésultats de l'optimisation (cycle NEDC)
Gestion d'énergie
100 200 300 400 500 600 700 800 900 1000 1100 12001
1.5
2
2.5
3
3.5
4
Temps (s)
Pui
ssan
ce s
ys. P
AC
(kW
)Profil de puissance Sys. PAC optimisée pour le cycle NEDC
Méthode Consommation H2 (g/km) λ1
Pontryaguine 17,5 5,66
λ1 obtenu par itération de façon à respecter les contraintes et lesconditions limites
26/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
GénéralitésFormulation du problème d'optimisationMéthodes d'optimisationRésultats de l'optimisation (cycle NEDC)
Gestion d'énergie
0 200 400 600 800 1000 120056
58
60
62
64
66
68
70
72
74
Temps (s)
SoE
(%
)
Profil optimal de SoE pour le cycle NEDC
27/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Conclusions et perspectives
28/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Analyses et conclusions
Le système PAC possède une large zone de bon rendement.
L'algorithme peut utiliser une large plage de puissance du systèmePAC.
La commande linéarisante sur la dynamique de la pile (groupe d'air)permet de simpli�er la résolution du problème d'optimisation
Solution explicite
Loi de gestion optimale avec puissance sys. PAC quasimentconstante.
Découplage de la dynamique du véhicule et la dynamique du systèmePACValeurs de puissance PAC di�érentes pour des cycles di�érents(urbain, routier...).Consommation des auxiliaires même si la PAC ne fourni pas depuissance.
Coût d'arrêt du système.
Dépendance de la prédiction du cycle (valeur de λ1)
29/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Perspectives
Implémentation de critères de durabilité des systèmes sur la gestiond'énergie.
Synthèse d'une loi de gestion énergétique optimale (sans lapré-connaissance du cycle de roulage).
Approche prédictive.
Mise en oeuvre et validation de lois de gestion énergétique sur les bancsde test du CEA-LITEN.
30/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
Merci de votre attention
31/31

IntroductionDé�nition du véhicule
Modélisation système PAC et batteriesOptimisation
Conclusions et perspectives
M. Desbois-Renaudin, J. Scordia, R. Trigui, F. Badin, B. Jeanneret,C. Plasse, and J.-F. Sarrau, �Véhicules hybrides thermique -electriques etude paramétrique de l'architecture hybride parallèle,�rapport �nal d'étude, INRETS, 2004.
T. C. Moore and A. B. Lovins, �Vehicle design strategies to meetand exceed pngv goals,� SAE, 2000.
M. Montaru, Contribuition à l'évaluation du vieillissement des
batteries de puissance utilisées dans les véhicules hybrides selon leurs
usages.PhD thesis, Institut Polytechnique de Grenoble, 2009.
J. Scordia, Approche systématique de l'optimisation du
dimensionnement et de l'élaboration des lois de gestion d'énergie de
véhicules hybrides.PhD thesis, Université Heny Poincaré - Nancy 1, 2004.
J. C. CULIOLI, Introduction à l'Optimisation.Ellipses, 1994.
31/31