stanje i perspektive razvoja digitalno upravljanih …ddc.etf.rs/kratka.pdf · najva`niji problemi...
TRANSCRIPT

STANJE I PERSPEKTIVE RAZVOJA DIGITALNO UPRAVLJANIH ELEKTRI^NIHPOGONA
Slobodan N. Vukosavi}, Elektrotehni~ki fakultet u Beogradu
Sadr`aj- Automatski elektri~ni pogoni su proteklu dekaduobele`ili prodorom u mnoge industrijske grane i masovnomprimenom u okviru proizvoda op{te namene. Elektromotoriu alatnim ma{inama, industrijskim robotima, presama,liftovima, valjaoni~kim stanovima, kompresorima,pumpama, ventilatorima, elektri~nim vozilima, kranovima idrugde danas utro{e oko 2/3 proizvedene elektri~neenergije. Slo`ene funkcije upravljanja elektri~nimmotorima i procesima uspe{no se obavljaju uz pomo}savremenih ure|aja energetske elektronika i kompaktnihdigitalnih kontrolera submikrometarske geometrije,spremnih za obavljanje 108 operacija u sekundi.
Tehnologija elektri~nih pogona je konsolidovana iu odmaklom stanju razvoja, pa se u tradicionalnim vidovimanjihove primene ne o~ekuju dramati~ni pomaci. [iraprimena automatskih elektri~nih pogona uslovljena jezna~ajnim umanjenjem broja senzora i name}e redukovanetopologije pogonskih konvertora. Re{enje ovih problemale`i u razvoju novih algoritama upravljanja pogonom, gdese mogu
ostvariti relevantni i korisni rezultati. Neprekidanrazvoj postupaka proizvodnje i obrade materijala odre|ujutok evolucije automatskih pogona i ma{ina u industriji.Pored uve}anja brzine i preciznosti obrade, u pogon jepotrebno ugraditi funkcije dono{enja odluka i elementeinteligencije, dok se u pogledu topologije tra`i modularnosti decentralizacija.
U radu je analizirana evolucija pogonskihkonvertora, motora, senzora, digitalnih pogonskihkontrolera kao i zakona upravljanja pogonom. Razmotrenoje stanje u oblasti digitalno upravljanih pogona, navode senajva`niji problemi njihove primene i ukazuje naperspektive i trendove razvoja. Ukazano je na nove zahteve iprimene koje podsti~u dalje usavr{avanje elektri~nihpogona, kao i na tehnologije koje takav razvoj omogu}uju.
1. U V O D
U industrijskim i pogonima op{te nameneelektri~ni motori od kraja pro{log veka zamenjuju gasneturbine, pneumatske i hidrauli~ne aktuatore i SUS motore umeri odre|enoj razvojem tehnologije. Prednosti elektri~nihpogona su visoka pouzdanost, dugotrajnost, jednostavno iekonomi~no odr`avanje kao i ekolo{ka prihvatljivost –zanemarivo zaga|enje i nizak nivo buke. Kvalitet pogona sekod primene elektri~nih motora bitno uve}ava zbog visokogstepena iskori{}enja, malih gubitaka u praznom hodu, velikekratkotrajne preopteretljivosti, brzog dinami~kog odziva,mogu}nosti rekuperacije i spremnost za rad neposredno pouklju~enju. Elektri~ni pogoni su raspolo`ivi u {irokomdijapazonu snaga, ugaonih brzina obrtanja i pogonskihmomenata, lako se prilago|avaju razli~itim uslovimaeksploatacije (na primer, rad u eksplozivnim sredinama) iomogu}uju kontinualnu regulaciju brzine uklju~uju}i ireverziju. Elektromagnetni je naj~e{}e bez impulsa ili udara~ime je omogu}en miran rad pogona. Zna~aj elektri~nihpogona ogleda se u ~injenici da oni tro{e 60-70%proizvedene elektri~ne energije [1,2].
U protekle dve decenije pojavljuju se digitalnoupravljani elektri~ni pogoni zahvaljuju}i razvojutehnologije poluprovodni~kih prekida~a snage, digitalnihkontrolera, razvoju savremenih topologija konvertora snagekao i re{avanju slo`enih problema upravljanja.Automatizacija proizvodnih procesa u toku pedesetih godinado`ivljava nagli razvoj zahvaljuju}i uvo|enju numeri~kekontrole (NC) i zameni mehani~kih satnih mehanizama ireleja sklopovima digitalne elektronike. Raspolo`ivost prvihmikrora~unara (‘70-tih godina) omogu}uje prelazak nafleksibilnije ra~unarsko (CNC) upravljanje. Kao aktuatorikoriste se hidrauli~ki i pneumatski ure|aji (fluid power) dokse u regulisanim elektri~nim pogonima upotrebljavajuuglavnom motori za jednosmernu struju.
Premda superiornih karakteristika, ma{ine zanaimeni~nu struju sve do tehnolo{kih prodora u {ezdesetimgodimana primenu nalaze uglavnom u pogonima konstantnebrzine [3]. Uvo|enjem poluprovodni~kih prekida~kihelemenata energetske elektronike trofazni invertorivarijabilne u~estanosti i napona postaju ekonomi~ni ipouzdani. Danfoss 1968. godine proizvodi legendarni VLT5, frekvencijski regulator te`ak 54 kg, namenjen regulisanjubrzine trofaznih asinhronih motora snage do 4 kW(savremeni ekvivalent ure|aju VLT5 te`ak je 3.5 kg [4]).Prve primene frekvencijske regulacije bile su linije zafla{iranje, a odmah potom pogoni kompresora i pumpi gdese zahvaljuju}i frekvencijskoj regulaciji elimini{emehani~ko prigu{enje protoka fluida i tako {tedi energija iuve}ava pouzdanost. Asinhroni motori postaju motoripromenljive brzine koji postepeno potiskuju ma{inejednosmerne struje zahvaljuju}i ve}oj pouzdanosti, malojpotrebi za odr`avanjem i boljim karakteristikama.
Po~etkom ‘80-tih godina frekvencijski regulisaniasinhroni motori postaju {iroko rasprostranjeni, ali im jecena ve}a od ekvivalentnih pogona koncipiranih nama{inama jednosmerne struje, i pored znatno ve}e cenemotora za jednosmernu struju. Oko 70% cene pogona saasinhronim motorom odnosilo na konvertor snage ielektronske sklopove pogonskog kontrolera, dok je cenaasinhronog motora bila manji deo (30%) cene pogona. Kodpogona sa ma{inama jednosmerne struje, odnos je obrnut: uceni pogona dominira (70%) motor [12], ~ija se cena nemo`e bitno umanjiti i odre|ena je cenama bakra i gvo`|a.Tehnolo{ki razvoj u oblasti poluprovodni~kih komponentisnage i digitalnih kontrolera doprineo je da frekvencijskiregulisani asinhroni motor krajem osamdesetih godina budenajekonomi~nije re{enje za pogone op{te namene. Danas urazvijenim zemljama [1] oko 80% elektri~nih pogona radisa konstantnom brzinom, dok su preostali pogoni (20%)promenljive brzine uglavnom frekvencijski regulisaniasinhroni motori. Svake godine se oko 15% postoje}ihpogona sa ma{inama za jednosmernu struju zameniasinhronim pogonima.
Primena ma{ina naizmeni~ne struje u pogonimavisokih performansi omogu}ena je razvojem teorijevektorskog upravljanja. Nakon uvo|enja prostornih vektorau analizu elektri~nih ma{ina [6], razvijeni su koncepti

indirektnog i direktnog [7,8] vektorskog upravljanja.Numeri~ki intenzivni, algoritmi vektorskog upravljanjanalaze primenu [11] dvadeset godina nakon prvih teorijskihradova, tek nakon pojave kompaktnih 16-bitnih pogonskihkontrolera [13].
Digitalna realizacija zakona upravljanjaomogu}ena je ‘70-tih godina pojavom kompaktnih 8-bitnihmikrokontrolera. Digitalna tehnika i digitalna realizacijaupravlja~kog sistema kod elektromotornih pogona doprinosistabilnosti, fleksibilnosti i pobolj{anju performansi.Mikrokontroleri i namenski na~injeni procesori se ugra|uju~ak i u ure|aje kao {to su ku}ni aparati, gde pored funkcijaupravljanja pogonom obavljaju i pomo}ne funkcije nadzora,signalizacije i upravljanja procesima kao {to je pranje. Uovakvim primenama digitalni kontroler emulira, krozhardverske i programske resurse, funkcije koje su ranijetradicionalno ostvarivane analognim elektronskim kolima.
Slika 1.1: Osnovne funkcije merenja i upravljanjadigitalnog kontrolera u pogonu sa asinhronim motorom.
U periodu ’70.-’80. godine 8-bitni mikrokontroleriu okviru elektri~nih pogona JSS obavljaju funkcije faznogupravljanja mre`no vo|enim tiristorskim ispravlja~ima, kaoi funkcija brzinske i pozicione regulacije DC-servo motora.U okviru frekvencijskih regulatora, mikrokontroleri sekoriste za realizaciju trofazne {irinske modulacije, RIkompenzacije i kompenzacije klizanja. Slo`ene funkcijevektorskog upravljanja zahtevale su razvoj brzih 16-bitnihmikrokontrolera sa pridru`enim periferijskim ure|ajimapotrebnim za upravljanje motorom za naizmeni~nu struju[15,16]. U periodu do ’90. godine razvijeni su digitalnoupravljani pogoni visokih performansi koncipirani naTeslinom asinhronom motoru, u okviru kojih 16-bitnimikrokontroleri obavljaju funkcije direktnog i indirektnogvektorskog upravljanja, skalarnog upravljanja, digitalneregulacije statorske struje, brzine i pozicije, kao i ni`i nivofunkcija upravljanja kretanjem. Osetljivost motora, pogona iprocesa na varijacije parametara u toku rada [17,18] zahtevarazvoj i primenu algoritama za identifikaciju parameteramotora i procesa [24] pre [19] i u toku rada pogona [20].Potreba za primenom optimizacionih metoda i neophodnostpobolj{anja performansi digitalnih regulatora struje [21]dovodi do realizacija zasnovanih na transpjuterima isignalnim procesorima [9,22]. Mogu}nost obavljanja ve}egbroja paralelnih funkcija, konkurentno izvr{avanjealgoritama i mogu}nost obavljanja vi{e od milijarduoperacija u sekundi [23] obezbe|uju zna~ajno pobolj{anjekarakteristika pogona i omogu}uju nove pristupeupravljanju [25]. Digitalno upravljani pogoni visokihperformansi danas koriste poglavito asinhrone i sinhroneservo motore za koje su razvijeni algoritmi direktnogdigitalnog upravljanja. Brzi digitalni pogonski procesoriomogu}uju realizaciju povratne sprege po stanju, redukcijubroja senzora zahvaljuju}i primeni opservera i estimaciji
parametara i stanja, direktno (DTC) i inkrementalno(IncTC) upravljanje momentom, rekonstrukciju faznih strujaiz struje me|ukola konvertora (DC-link), kao i paralelnoizvr{avanje sekundarnih kontura optimizacije i adaptacije.
1.1 EKONOMSKI ZNA^AJ ELEKTRI^NIHPOGONA
Udeo elektri~nih pogona u privredi jedne zemlje,trendovi i obim istra`ivanja i razvoja mogu se proceniti iztr`i{nih pokazatelja. Relevantne analize pokazuju daelektri~ni pogoni op{te namene po zna~aju dalekoprevazilaze servo pogone visokih performansi. Frost &Sullivan Market Intelligence izve{tava da je u Engleskoj odukupnog broja pogona ugra|enih u 1997. godini bilo 52.4%pogona sa ma{inama naizmeni~ne struje, 33.7% sama{inama jednosmerne struje, dok se ostatak od 13.9%odnosi na hidrauli~ne i pneumatske aktuatore. Isti izvorpredvi|a da primene sa ma{inama naizmeni~ne struje u1998. godini uve}aju za 3.9%. U istoj zemlji, u pogone sama{inama naizmeni~ne struje namenjene vodoprivrediizdvaja se 14e6 Lstg u 1997. i 18e6 Lstg u 1998. godini.
Podaci za Sjedinjene Dr`ave pokazuju da je u1994. godini vi{e od 90% proizvedenih motora imalonazivnu snagu ispod 1HP (fractional HP motors-FHP). Odtoga, proizvedeno je 550e6 motora op{te namene ukupnevrednosti $6.1e9, dok je za potrebe servo pogona uautomobilima i aplikacijama industrijske automatizacijeproizvedeno FHP motora sa pridru`enim reduktorima uvrednosti od $1.06e9. Ve}a raspolo`ivost simetri~nogtrofaznog sistema napona u Evropskim zemljama ~ini danajve}u primenu ima Teslin asinhroni motor. Motori zasnage do 7.5 kW predstavljaju 40% tr`i{ta, motori snage 7.5– 75kW 31%, dok asinhroni motori snage preko 75kWpredstavljaju 29% tr`i{ta. Prodor asinhronih motora u oblastku}nih aparata je relativno spor jer u ovoj oblasti tr`i{tename}e izuzetno niske cene. Regulisani pogoni mogu bitiprimenjeni u ve{ ma{inama i usisiva~ima (snage 0.5 – 1kW) kada proizvodna cena dostigne nivo od $15. Procenjujese da }e se tehnolo{ki preduslovi za izradu ovakvih pogonaste}i 2001 godine.
Rast proizvodnje elektri~nih pogona visokihperformansi uslovljen je op{tim privrednim razvojem iinvesticijama u nova proizvodna postrojenja, dok se razvojodvija uglavnom u visoko razvijenim zemljama: 25%svetske proizvodnje alatnih ma{ina na~ini se u Japanu, 22%u Nema~koj a oko 20% u Kini. Frost & Sullivan izve{tavada je u protekloj dekadi prose~an rast proizvodnje servopogona u Evropi bio oko 5%. Studija agencije Motion TechTrends predvi|a da }e u prodaja elektri~nih motora iservopoja~ava~a za primene u industrijskoj automatizaciji uS.A.D. 2000. godine dosti}i $4.5e9, od ~ega }e se 52.8%odnositi na trofazne asinhrone motore, 4.2% na step motore,22.6% na servo motore za jednosmernu struju, i 20.4% nasinhrone servo motore. Stalni napredak u kvalitetu alatnihmaterijala i alata namenjenih ma{inskoj obradi metala inemetala omogu}uje uve}anje brzine rezanja. Potreban jekontinuirani rad na razvoju elektromotornih vretena zavelike brzine, kao i razvoj savremenih re{enja ule`i{tenja ihla|enja motora za glavna i pomo}na kretanja. Potreba zadugotrajnim istra`ivanjem i investiranjem ~ine razvoj servopogona sporijim u odnosu na razvoj pogona op{te namene ifavorizuje proizvodnju u visoko razvijenim zemljama.
1.2 PODELA SAVREMENIH POGONA

Podela savremenih elektri~nih pogona mo`e sena~initi po mestu primene, karakteristikama, nivou napona,po snazi i topologiji konvertora. Mo`e se uo~iti petosnovnih grupa:
i) Elektri~ni pogoni visokih performansipredstavljaju primenu u kojoj je regulacija brzineneophodna. Elektri~ni motor koristi se kao aktuatormomenta u krugu regulacije sile, momenta, protoska,protoka, brzine i polo`aja. Na osovinu motora se redovnougra|uje dava~ brzine i polo`aja. Pozicioni i brzinskiservomehanizmi koriste se u procesnoj industriji, kodma{ina alatljika, u robotici, kod industrijskih manipulatora,u valjaonicama, namotava~ima, liftovima, kranovima, upapirnoj i tekstilnoj industriji itd. U ovim pogonima senaj~e{}e susre}u asinhroni servo motori i sinhroni motori sapermanentnim magnetima na rotoru [5],[14]. Nazivna snagamotora kre}e se u opsegu od 0.05 do 200 kW, dok jeo~ekivani propusni opseg regulacione konture momenta,brzine i polo`aja 1kHz, 200Hz i 60 Hz respektivno. Brojnovih instalacija uslovljen je razvojem industrije. Prose~nogodi{nje uve}anje DC-servo pogona je 3%, dok se broj AC-servo jedinica uve}a za 12%.
Slika 1.2: Primena frekvencijski regulisanog asinhronogmotora u pogonu putni~kog lifta.
ii) Regulacija brzine je kod elektri~nih pogonaop{te namene opciona. Njena funkcija je u{teda energije,umanjenje tro{kova odr`avanja i uve}anje pouzdanosti. Kodpogona pumpi, ventilatora, kompresora (PVK) kao i kodHVAC primena (heating, ventilation and air-conditioning)potrebno je sporo pode{avati brzinu uz relativno malizahtevanu ta~nost. Prednosti dobijene eliminacijom off-onregulacije i mehani~kog prigu{enja protoka fluida ~ine da sebroj novih instalacija brzo uve}ava. Najve}u primenu imajuniskonaponski asinhroni motori snage od 1kW do 500kWkao i sinhroni motori snage preko 100 kW. Motori neposeduju dava~ polo`aja niti tahogenerator i regulator jenaj~e{}e zasnovan na direknom vektorskom upravljanju.Topologija pogonkog konvertora i poluprovodni~kiprekida~i snage biraju se tako da se umanji strminanaponskog talasa (dV/dt) i ubla`i problem ubrzanog starenjaizolacije konvertorski napajanih motora.
iii) Elekti~ni pogoni u proizvodima {irokepotro{nje primenjuju se radi uve}anja udobnosti, u{tedeelektri~ne energije i umanjenja ukupne cene ure|aja.Primarni zahtev je nizak utro{ak materijala i cena kao imogu}nost masovne i ekonomi~ne proizvodnje. U tu svrhu
se razvijaju nove topologije pretvara~a [26,29], nove vrsteelektri~nih motora [27] i pristupi problemu upravljanjapogonom bez senzora na osovini [28]. Naprimer, regulisanipogon snage 1HP u ma{ini za pranje rublja mora imatiinternu cenu ispod $14 [27]. Zahteva se minimalnotoplotno, zvu~no i elektromagnetno zaga|enje okoline odstrane pogona, dok je dinamika i ta~nost regulacije odsekundarnog zna~aja. U okviru ku}nih aparata koriste senaj~e{}e univerzalni (kolektorski) motori, trofazni asinhronimotori i monofazni sinhroni motori sa permanentnimmagnetom na rotoru. Susre}u se nazivne snage od 10W do 5kW. Motori za JSS sa permanentnim magnetom na statorususre}u se u servo i pomo}nim aplikacijama kod savremenihautomobila (ventilatori, pokretanje prozora i sedi{ta,automatizovani sigurnosni pojas itd.). Trend integracijeupravlja~kih elektronskih sklopova i poluprovodni~kihprekida~a snage u jedninstveno integrisano kolo, kao inastojanje da se pogonski konvertor integri{e u ku}i{temotora obe}avaju dalje umanjenje cene i {iru primenuregulisanih pogona u ure|ajima koji se masovno proizvode.
iv) Elektrovu~ni pogoni sa motorima zajednosmernu i naizmeni~nu struju opsega snaga od 0.5kWdo 2MW koriste se za pokretanje vozila gradskogsaobra}aja, u `eleznici, kod manipulatora, elektri~nihautomobila, kao i u okviru sistema za brzi prevoz putnika(RTS). @eljene karakteristike vu~nih pogona su sposobnostza rad u re`imu slabljenja polja (P=Cte) sa {to ve}imodnosom ωMAX/ωNOM, sposobnost za elektri~no ko~enje,rekuperaciju, kao i realizacija protivklizne za{tite zasnovanana brzom odzivu momenta i opserverima ubrzanja. Uslu~aju autonomnih vozila koja koriste akumulatore, odzna~aja je {to ve}i stepen korisnog dejstva motora ikonvertora [30]. Jednostavnost konstrukcije rotoraasinhronih ma{ina omogu}uje realizaciju naprednihkonstrukcija vu~nih motora [31] kao {to je linerni motor(LIM) i asinhroni vu~ni motor ugra|en u samu pogonskuosovinu. Elektrovu~ni konvertori se grade za niz razli~itihnaponskih nivoa. Kod manipulatora i elektri~nih automobilasusre}u se naponi jednosmernog me|ukola od 24V do 300V,dok se kod RTS sistema i `eleznice konvertori grade zanapone 600-2500V. Za vu~ne konvertore grade se namenskipoluprovodni~ki prekida~i snage velikih radnih struja inapona.
v) Elektri~ni pogoni snage ve}e od 500kW seizra|uju za srednje naponske nivoe. Susre}u se standardnevrednosti nazivnih napona od 2300, 4160 i 6600 V. Oblastiu kojima se srednjenaponski motori susre}u su [32]valjaoni~ki stanovi, mlinovi, pumpe i kompresori. Najve}iprimenu imaju asinhroni motori, dok se kod izrazito velikihsnaga i potrebe za minimizacijom reaktivne snageprimenjuju sinhroni motori snage do 10 MW. Sporohodnimotori se napajaju iz mre`om vo|enih ciklokonvertora,sinhroni motori se napajaju iz strujnih invertora, dok se zanapajanje asinhronih motora vr{i iz vi{enivoskih invertora[33,34]. Upotrebom elektri~nih pogona se kod kompresoravelike snage u naftnoj industriji tro{kovi odr`avanja umanjesa $40/kW/god. (podatak za pogone sa gasnom ili parnomturbine) na $10/kW/god. Dalja ekspanzija elektri~nihpogona velike snage odre|ena je poglavito ekonomskim iekolo{kim ~iniocima. Topologija konvertora snage ialgoritmi upravljanja ovim pogonima nisu konsolidovani ipredstavljaju polje u kome je mogu}e dati nove i originalnenau~ne i tehni~ke doprinose.

Stanje i perspektive razvoja svake od pomenutihpet grupa digitalno upravljanih elektri~nih pogona izlo`enesu u okviru rada. Razmotrena je evolucija tehnikaupravljanja pogonima, analiziran uticaj pojave namenskihbrzih procesora za upravljanje elektromehani~komkonverzijom i kretanjem, razvoj naprednihpoluprovodni~kih prekida~a snage i njihov uticaj natopologiju pogonskih konvertora, kao i razvoj novih vrstaelektri~nih motora i senzora. Uo~eni su trendovi [35,36] dakroz primenu savremenih pristupa upravljanju elektri~nipogoni steknu sposobnost prilago|avanja i dono{enjadiskretnih odluka na na~in koji umanjuje potrebu zaprisustvom tehni~kog osoblja u fazi instalacije i trajnog rada
pogona. Analizirana su mogu}a re{enja problemaelektromagnetne kompatibilnosti, perspektive razvojadigitalne komunikacije izme|u regulisanih pogona iprocesnih ra~unara, pomaci ka decentralizovanomupravljanju i distribuiranoj inteligenciji, trendovimodularnog izvo|enja i op{ti trend uve}anja ekonomi~nostiputem hardverske i programske integracije. Prou~eni suzahtevi koje pozicionim servomehanizmima name}usavremeni centri za ma{insku obradu i tehnologije rezanjavodenim i laserskim mlazom i nazna~eni osnovni pravcidaljeg istra`ivanja i razvoja u polju pogona visokihperformansi i pogona op{te namene.
Slika 1.3: Savremeni pogonski konvertor spreman za napajanje motora snage 500 kW.
2. STANJE I PERSPEKTIVE RAZVOJA ELEKRI^- NIH POGONA VISOKIH PERFORMANSI
Struktura sistema za upravljanje elektri~nimpogonima visokih performansi poseduje:
i) Spolja{nju konturu koja pokreta~ki moment elektri~nogaktuatora koristi u regulisanju ubrzanja, brzine i polo`ajadelova mehani~kog podsistema; i
ii) Unutra{nju regulacionu konturu koja upravlja pogonskimkonvertorom iz koga je elektri~ni motor napajan tako da seveli~ine elektri~nog podsistema (struja, fluks, moment)odr`avaju za zadatim vrednostima.
Unutra{nja kontura odre|ena je vrstom motora dokspolja{nja zavisi od aplikacije. U okviru ovog poglavljaizlo`ene su specifi~nosti primene elektri~nih pogona visokihperformansi, najzna~ajniji problemi koji se susre}u kodrealizacije unuta{nje i spolja{nje konture, rezultati primenedosada{njih istra`ivanja kao i trendovi razvoja.
2.1 ZADACI ELEKTRI~NIH AKTUATORA U AUTOMATSKIM PROIZVODNIM MA{INAMA
Modernizacija procesa proizvodnje i uvo|enjeautomatizovanih proizvodnih ma{ina promenili su navikeljudi i svet oko njih. Napredak u polju industrijskeautomatizacije naglo se ubrzava u toku sedamdesetih, kadaelektri~ni pogoni promenljive brzine zamenjuju hidrauli~nei pneumatske aktuatore, dok se na zadacima sinhronizacije iupravljanja proizvodnjom dotada{nji mehani~ki satnimehanizmi zamenjuju digitalnim ra~unarima. Alatnema{ine i industrijski roboti pogonjeni servo motorima zanaizmeni~nu struju doprinose pove}anju produktivnosti ikvaliteta obrade u automobilskoj industriji, valjaonicama,tekstilnoj i industriji papira, kod prerade i pakovanja hrane imnogim drugim aplikacijama. Na stalnu ekspanziju centaraza ma{insku obradu ukazuje ~injenica da njihovaproizvodnja u Nema~koj 1993. godine dosti`e obim of 200e9 DM dok 1997. prevazilazi 264e9 DM, {to uslovljava itempo razvoja elektri~nih servo pogona.
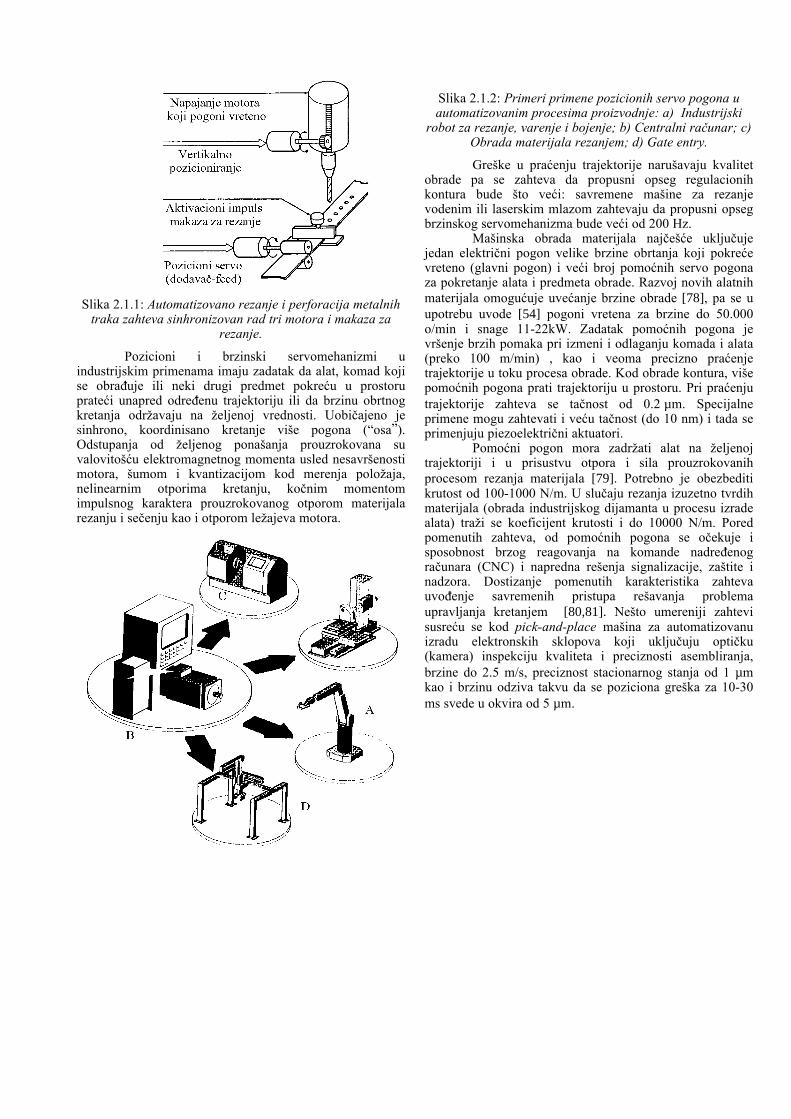
Slika 2.1.1: Automatizovano rezanje i perforacija metalnihtraka zahteva sinhronizovan rad tri motora i makaza za
rezanje.
Pozicioni i brzinski servomehanizmi uindustrijskim primenama imaju zadatak da alat, komad kojise obra|uje ili neki drugi predmet pokre}u u prostoruprate}i unapred odre|enu trajektoriju ili da brzinu obrtnogkretanja odr`avaju na `eljenoj vrednosti. Uobi~ajeno jesinhrono, koordinisano kretanje vi{e pogona (“osa”).Odstupanja od `eljenog pona{anja prouzrokovana suvalovito{}u elektromagnetnog momenta usled nesavr{enostimotora, {umom i kvantizacijom kod merenja polo`aja,nelinearnim otporima kretanju, ko~nim momentomimpulsnog karaktera prouzrokovanog otporom materijalarezanju i se~enju kao i otporom le`ajeva motora.
Slika 2.1.2: Primeri primene pozicionih servo pogona uautomatizovanim procesima proizvodnje: a) Industrijski
robot za rezanje, varenje i bojenje; b) Centralni ra~unar; c)Obrada materijala rezanjem; d) Gate entry.
Gre{ke u pra}enju trajektorije naru{avaju kvalitetobrade pa se zahteva da propusni opseg regulacionihkontura bude {to ve}i: savremene ma{ine za rezanjevodenim ili laserskim mlazom zahtevaju da propusni opsegbrzinskog servomehanizma bude ve}i od 200 Hz.
Ma{inska obrada materijala naj~e{}e uklju~ujejedan elektri~ni pogon velike brzine obrtanja koji pokre}evreteno (glavni pogon) i ve}i broj pomo}nih servo pogonaza pokretanje alata i predmeta obrade. Razvoj novih alatnihmaterijala omogu}uje uve}anje brzine obrade [78], pa se uupotrebu uvode [54] pogoni vretena za brzine do 50.000o/min i snage 11-22kW. Zadatak pomo}nih pogona jevr{enje brzih pomaka pri izmeni i odlaganju komada i alata(preko 100 m/min) , kao i veoma precizno pra}enjetrajektorije u toku procesa obrade. Kod obrade kontura, vi{epomo}nih pogona prati trajektoriju u prostoru. Pri pra}enjutrajektorije zahteva se ta~nost od 0.2 µm. Specijalneprimene mogu zahtevati i ve}u ta~nost (do 10 nm) i tada seprimenjuju piezoelektri~ni aktuatori.
Pomo}ni pogon mora zadr`ati alat na `eljenojtrajektoriji i u prisustvu otpora i sila prouzrokovanihprocesom rezanja materijala [79]. Potrebno je obezbeditikrutost od 100-1000 N/m. U slu~aju rezanja izuzetno tvrdihmaterijala (obrada industrijskog dijamanta u procesu izradealata) tra`i se koeficijent krutosti i do 10000 N/m. Poredpomenutih zahteva, od pomo}nih pogona se o~ekuje isposobnost brzog reagovanja na komande nadre|enogra~unara (CNC) i napredna re{enja signalizacije, za{tite inadzora. Dostizanje pomenutih karakteristika zahtevauvo|enje savremenih pristupa re{avanja problemaupravljanja kretanjem [80,81]. Ne{to umereniji zahtevisusre}u se kod pick-and-place ma{ina za automatizovanuizradu elektronskih sklopova koji uklju~uju opti~ku(kamera) inspekciju kvaliteta i preciznosti asembliranja,brzine do 2.5 m/s, preciznost stacionarnog stanja od 1 µmkao i brzinu odziva takvu da se poziciona gre{ka za 10-30ms svede u okvira od 5 µm.
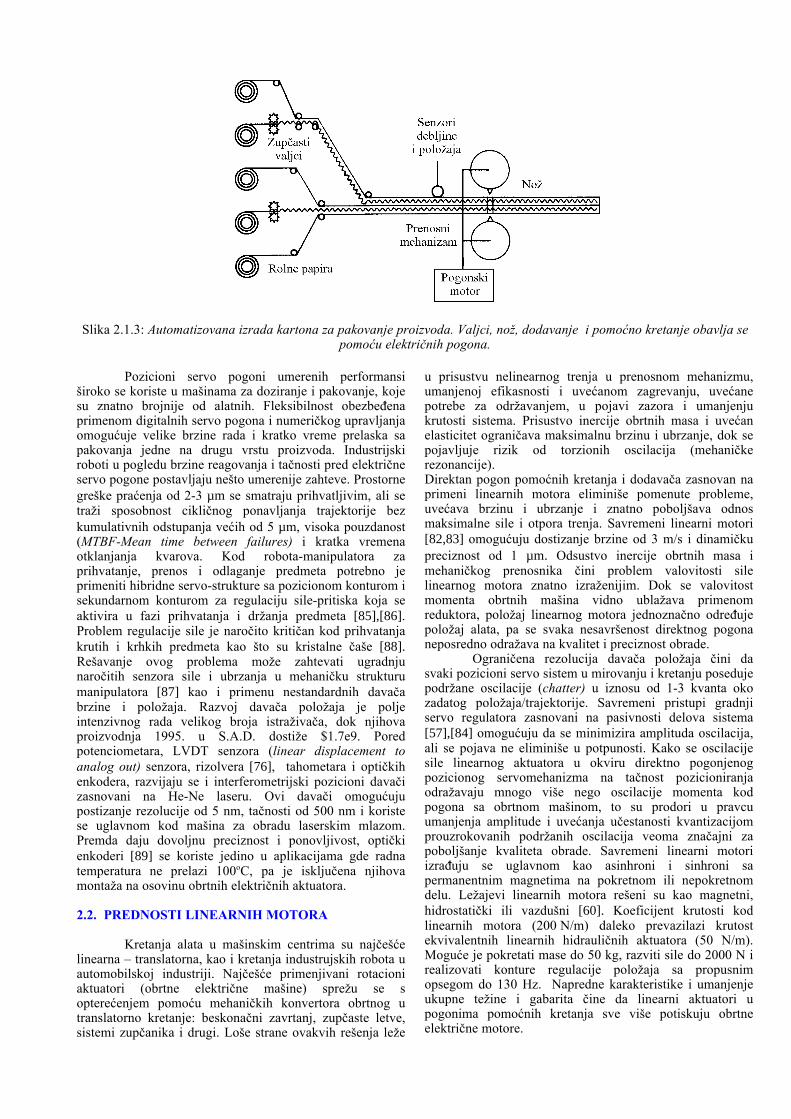
Slika 2.1.3: Automatizovana izrada kartona za pakovanje proizvoda. Valjci, no`, dodavanje i pomo}no kretanje obavlja sepomo}u elektri~nih pogona.
Pozicioni servo pogoni umerenih performansi{iroko se koriste u ma{inama za doziranje i pakovanje, kojesu znatno brojnije od alatnih. Fleksibilnost obezbe|enaprimenom digitalnih servo pogona i numeri~kog upravljanjaomogu}uje velike brzine rada i kratko vreme prelaska sapakovanja jedne na drugu vrstu proizvoda. Industrijskiroboti u pogledu brzine reagovanja i ta~nosti pred elektri~neservo pogone postavljaju ne{to umerenije zahteve. Prostornegre{ke pra}enja od 2-3 µm se smatraju prihvatljivim, ali setra`i sposobnost cikli~nog ponavljanja trajektorije bezkumulativnih odstupanja ve}ih od 5 µm, visoka pouzdanost(MTBF-Mean time between failures) i kratka vremenaotklanjanja kvarova. Kod robota-manipulatora zaprihvatanje, prenos i odlaganje predmeta potrebno jeprimeniti hibridne servo-strukture sa pozicionom konturom isekundarnom konturom za regulaciju sile-pritiska koja seaktivira u fazi prihvatanja i dr`anja predmeta [85],[86].Problem regulacije sile je naro~ito kriti~an kod prihvatanjakrutih i krhkih predmeta kao {to su kristalne ~a{e [88].Re{avanje ovog problema mo`e zahtevati ugradnjunaro~itih senzora sile i ubrzanja u mehani~ku strukturumanipulatora [87] kao i primenu nestandardnih dava~abrzine i polo`aja. Razvoj dava~a polo`aja je poljeintenzivnog rada velikog broja istra`iva~a, dok njihovaproizvodnja 1995. u S.A.D. dosti`e $1.7e9. Poredpotenciometara, LVDT senzora (linear displacement toanalog out) senzora, rizolvera [76], tahometara i opti~kihenkodera, razvijaju se i interferometrijski pozicioni dava~izasnovani na He-Ne laseru. Ovi dava~i omogu}ujupostizanje rezolucije od 5 nm, ta~nosti od 500 nm i koristese uglavnom kod ma{ina za obradu laserskim mlazom.Premda daju dovoljnu preciznost i ponovljivost, opti~kienkoderi [89] se koriste jedino u aplikacijama gde radnatemperatura ne prelazi 100oC, pa je isklju~ena njihovamonta`a na osovinu obrtnih elektri~nih aktuatora.
2.2. PREDNOSTI LINEARNIH MOTORA
Kretanja alata u ma{inskim centrima su naj~e{}elinearna – translatorna, kao i kretanja industrujskih robota uautomobilskoj industriji. Naj~e{}e primenjivani rotacioniaktuatori (obrtne elektri~ne ma{ine) spre`u se soptere}enjem pomo}u mehani~kih konvertora obrtnog utranslatorno kretanje: beskona~ni zavrtanj, zup~aste letve,sistemi zup~anika i drugi. Lo{e strane ovakvih re{enja le`e
u prisustvu nelinearnog trenja u prenosnom mehanizmu,umanjenoj efikasnosti i uve}anom zagrevanju, uve}anepotrebe za odr`avanjem, u pojavi zazora i umanjenjukrutosti sistema. Prisustvo inercije obrtnih masa i uve}anelasticitet ograni~ava maksimalnu brzinu i ubrzanje, dok sepojavljuje rizik od torzionih oscilacija (mehani~kerezonancije).Direktan pogon pomo}nih kretanja i dodava~a zasnovan naprimeni linearnih motora elimini{e pomenute probleme,uve}ava brzinu i ubrzanje i znatno pobolj{ava odnosmaksimalne sile i otpora trenja. Savremeni linearni motori[82,83] omogu}uju dostizanje brzine od 3 m/s i dinami~kupreciznost od 1 µm. Odsustvo inercije obrtnih masa imehani~kog prenosnika ~ini problem valovitosti silelinearnog motora znatno izra`enijim. Dok se valovitostmomenta obrtnih ma{ina vidno ubla`ava primenomreduktora, polo`aj linearnog motora jednozna~no odre|ujepolo`aj alata, pa se svaka nesavr{enost direktnog pogonaneposredno odra`ava na kvalitet i preciznost obrade.
Ograni~ena rezolucija dava~a polo`aja ~ini dasvaki pozicioni servo sistem u mirovanju i kretanju posedujepodr`ane oscilacije (chatter) u iznosu od 1-3 kvanta okozadatog polo`aja/trajektorije. Savremeni pristupi gradnjiservo regulatora zasnovani na pasivnosti delova sistema[57],[84] omogu}uju da se minimizira amplituda oscilacija,ali se pojava ne elimini{e u potpunosti. Kako se oscilacijesile linearnog aktuatora u okviru direktno pogonjenogpozicionog servomehanizma na ta~nost pozicioniranjaodra`avaju mnogo vi{e nego oscilacije momenta kodpogona sa obrtnom ma{inom, to su prodori u pravcuumanjenja amplitude i uve}anja u~estanosti kvantizacijomprouzrokovanih podr`anih oscilacija veoma zna~ajni zapobolj{anje kvaliteta obrade. Savremeni linearni motoriizra|uju se uglavnom kao asinhroni i sinhroni sapermanentnim magnetima na pokretnom ili nepokretnomdelu. Le`ajevi linearnih motora re{eni su kao magnetni,hidrostati~ki ili vazdu{ni [60]. Koeficijent krutosti kodlinearnih motora (200 N/m) daleko prevazilazi krutostekvivalentnih linearnih hidrauli~nih aktuatora (50 N/m).Mogu}e je pokretati mase do 50 kg, razviti sile do 2000 N irealizovati konture regulacije polo`aja sa propusnimopsegom do 130 Hz. Napredne karakteristike i umanjenjeukupne te`ine i gabarita ~ine da linearni aktuatori upogonima pomo}nih kretanja sve vi{e potiskuju obrtneelektri~ne motore.

Slika 2.2.1: Pokreta~ka sila se kod linearnog asinhronog motora ostvaruje kroz interakciju magnetnih polova indukovanih upodlozi i struja u provodnicima pokretnog dela.
2.3. PROBLEMI UPRAVLJANJA KRETANJEM IPRAVCI RAZVOJA UPRAVLJA~KIH STRUKTURA
Razvoj tehnologije je omogu}io da se u proizvodnjiljudski mi{i}i zamene elektri~nim pogonima. Savremeniproizvodni procesi zahtevaju da se i ‘glava’ (sposobnostradnika-operatora da obavlja funkcije odlu~ivanja) zameniprocesnim ra~unarom koji bi samostalno obavljao funkcijeodlu~ivanja, nadzora, prilago|avanja, i korektivnogdelovanja. Ubrzani razvoj i primenu imaju konceptiupravljanja [49],[52],[62] ~ija struktura obezbe|uje da seupravlja~ke odluke donose na na~in sli~an odlu~ivanjuhumanog operatora.
Problem upravljanja pozicionimservomehanizmima ogleda se u konfliktnim zahteva za svebr`im odzivom (do 2 m/s) i sve ve}om ta~no{}u (ispod1µm). Vreme potrebno da se pri kretanju punom brzinompre|e put jednak dozvoljenoj gre{ci pra}enja manje je od1µs kod najve}eg broja savremenih ma{ina. Upravljanjekretanjem (pozicijom) u okviru spolja{nje konture i danas senaj~e{}e vr{i uz pomo} konvencionalnih IP i PIDregulatora. Varijacija frikcionih i inercionih otpora u tokurada zahteva ~esta prilago|avanja i pode{avanja u toku radama{ine/robota. U velikom broju slu~ajeva nije mogu}epotrebne parametre mehani~kog sistema izmeriti ili unapredpoznavati. Procena parametara servo sistema pomo}upro{irenog Kalmanovog filtra [58] daje dobre rezultate alise u op{tem slu~aju ne mo`e primeniti. ^esto je potrebnoupravljati kretanjem mehani~kog podsistema na osnovuveoma male koli~ine informacija. Konvencionalni PIDkontroler ne omogu}uje robusnost i ta~nost u prisustvuvarijacije parametara, mrtvog hoda i elasticiteta prenosnikai nelinearnih otpora kretanju. Neki savremeni pristupiupravljanju kretanjem (MRAC, self-tuning, opserver stanja ipovratna sprega po stanju) zahtevaju poznavanje modela iparametara mehani~kog podsistema pa ne mogu naadekvatan na~in re{iti pomenute zahteve. Sistemi sapromenljivom strukturom [48] obezbe|uju tra`enurobusnost ali im je nedostatak postojanje znatnih podr`anihoscilacija (chatter) upravlja~kih promenljivih i stanja.
Prve primene fuzzy struktura u regulaciji polo`aja[62] rezultuju odzivom ~ija brzina, ta~nost, i rad ustacionarnom stanju ne ispunjavaju u potpunosti savremene
zahteve, ali se zato posti`e zadovoljavaju}i rad u uslovimapromene parametara i nelinearnog optere}enja. Fuzzy-koncept upravljanja, zasnovan na Zadeh-ovoj [49] teorijiskupova, u proteklim godinama nalazi {iroku primenu uupravljanju elektri~nim pogonima. Realizacija ovenelinearne upravlja~ke strukture ne zahteva ta~nopoznavanje matemati~kog modela. Rad samog fuzzyregulatora uklju~uje konverziju (fuzzifier) ulaznih analognihsignala (polo`aj, brzina, struja motora) u ‘lingvisti~ke’promenljive (kvalitete), evaluaciju if-then-else ure|enihpravila, dono{enje odluke - selekciju ‘lingvisti~kog’upravljanja i njegovu konverziju (defuzzifier) u izlazni,analogni upravlja~ki signal (napon, struja, zadata vrednostmomenta). Karakteristike dobijene primenom fuzzyregulatora su inherentno suboptimalne, ali je ova strukturanaro~ito podesna za realizaciju upravljanja u uslovima malekoli~ine informacija o ma{ini/robotu. Naro~ito zna~ajnaprednost fuzzy upravljanja pogonom je sposobnost za rad samanje preciznim senzorima, kratko vreme potrebno zarazvoj, kao i skromni zahtevi po pitanju RAM memorije inumeri~kih sposobnosti koje se tra`e od digitalnogpogonskog kontrolera, {to rezultuje ni`om cenom sistema.
Umanjenje gre{ke u pra}enju zadate trajektorijemogu}e je umanjiti primenom ve{ta~ke neuronske mre`e(ANN) [52], koja je naro~ito pogodna za potiskivanjene`eljenih efekata otpora kretanju kod cikli~nog izvo|enjakontura. Prisustvo vi{e paralelnih grana izme|u svakogulaza i izlaza neuronske mre`e uve}ava njenu pouzdanost.Paralelna struktura mre`e pode{ava se (trenira) na skupuulaznih i izlaznih podataka. Kroz ove podatke defini{e se`eljeno pona{anje mre`e. Sposobnost prilago|avanja(‘u~enja’) i mogu}nost rada bez preciznog poznavanjastrukture i parametara objekta ~ine neuronske mre`epodesnim za primene u kontroli kretanja; ~este su primeneneuronskih mre`a za obavljanje funkcija proceneparametara i stanja, vr{enje optimizacije kao i prilago|enjapromenama parametara i procesa. Veoma su, me|utim, retkislu~ajevi neposrednog upravljanja pomo}u ANN, pogotovuu slu~ajevima koji zahtevaju veliki stepen sigurnosti ipredvidivosti. Pona{anje mre`e se mo`e sa potpunomsigurno{}u predvideti samo za ulazne signale koji pripadajuskupu na kome je obavljeno obu~avanje mre`e. Pomenutinedostatak se u poslednje vreme otklanja primenom

hibridnih neuro-fuzzy struktura, u kojima se potrebnarobusnost i sigurnost obezbe|uje delovanjem fuzzyregulatora.
2.4. PROBLEMI MEHANI~KE REZONANCIJEKOD MODERNIH SERVO POGONA
Sprega elektri~nog servo motora radnog dela ma{ine(alata) realizuje se pomo}u mehani~kih prenosnika kao {tosu osovine, zup~anici, zup~aste letve i trake i drugi.Mehani~ka sprega poseduje kona~nu krutost. Elasti~nomspregom obrtne mase rotora i alata formira se slaboprigu{eni oscilatorni sistem drugog reda. Red sistema i brojoscilatornih modova vi{eosnog manipulatora mo`e biti ve}iod dva. Mehani~ka rezonancija pojavljuje se i kod primenasa linearnim motorom. U~estanost oscilacija je ~esto u~ujnom opsegu, pa se problem rezonancije manifestuje i kao‘zvonjava’ koja prati udare sile i momenta.
U~estanosti mehani~ke rezonancije se kod proizvodnihma{ina male i srednje veli~ine kre}u u intervalu od 80 Hzdo 1kHz. Kako je propusni opseg najve}eg brojaservomehanizama sve do ‘90-tih godina bio ispod 50Hz,mehani~ka rezonancija je tretirana kao dinamika koja neuti~e na odziv servo sistema pa se ne mora uva`avati.Problemi torzionih oscilacija javljali su se retko, i touglavnom u slu~aju valjaoni~kih stanova [66,67] gde su sesretale niske (20Hz) u~estanosti rezonancije. U odsustvuadekvatnog signalnog procesora, Ohmae [64] predla`estabilizaciju valjaka zasnovanu na hardverskiimplementiranom opservera. Programsku implementacijaestimatora momenta daje Sugiura [68], dok Profumo [70]primenom opservera i povratne sprege po stanju posti`eeliminaciju mehani~ke rezonancije kod pogona elektri~nogvozila.
Servomehanizmi u modernim centrima za ma{inskuobradu (punching, water- and laser-cutting machines)dosti`u propusne opsege od 200Hz, tako da su rezonantneu~estanosti mehani~kog podsistema unutar propusnogopsega i vidno uti~u na karakter odziva i opseg stabilnihpoja~anja. Pored nesavr{enosti senzora, mehani~karezonancija je najve}a prepreka uve}anju brzine reagovanjai ta~nosti kod servo pogona. Nesavr{enost senzora [65],[149] za detekciju polo`aja rezultuje prisustvom {uma ~ija
je spektralna energija raspodeljena u neposrednoj blizinirezonantnih u~estanosti. Uticaj {uma na indiraktnoodre|ivanje stanja se mo`e umanjiti primenom Kalmanovogfiltra [71], pod uslovom da su u~estanosti mehani~kerezonancije relativno niske, kao i da senzor ne posedujeznatnu energiju {uma u blizini rezonantne u~estanosti. Uve}ini slu~ajeva neophodno je pribe}i ugradnji dodatnihdava~a polo`aja radi direktnog merenja promenljivih stanjana obe strane elasti~nog prenosnika [72,73].
Ugradnja dodatnih senzora optere}uje sistem dodatnimvezama, cenom, slo`eno{}u i umanjenjem pouzdanosti, pase u praksi ~esto pribegava pasivnim merama prigu{enjatorzionih/ mehani~kih oscilacija. Ograni~enjem ubrzanja[69], {to se posti`e uobli~avanjem zadate trajektorije,umanjuju se udari sile i momenta i tako redukuje energijasaop{tena rezonantnom mehani~kom kolu. Ovaj pristup dajeveoma dobre rezultate uz uslov da moment optere}enjanema promene koje su skokovite i bogate energijom nau~estanosti rezonancije. Nedostatak predstavlja i smanjenjeefektivne brzine rada sistema (produ`enje trajanja ciklusa)prouzrokovano manjim vrednostima ubrzanja. Pozitivnirezultati posti`u se uvo|enjem rednih anti-rezonantnihkompenzatora u strukturu za upravljanje brzinom ipolo`ajem. Diferencijalni kompenzator [74] oblikuje faznukarakteristiku u oblasti rezonante u~estanosti i pove}avamaksimalna poja~anja koja se mogu primeniti. Primenomnotch filtra [75] nastoji se da slabo prigu{eni polovimehani~ke strukture budu eliminisani nulama filtra, {tozahteva poznavanje u~estanosti i prigu{enja polovamehani~kog podsistema. Serijski anti-rezonantnikompenzator realizovan kao FIR filter [77] omogu}uje da seprigu{enje torzionih oscilacija postigne bez informacije oprigu{enju, uz odstupanja u pode{avanju u~estanosti od +/-25%.
Prigu{enje mehani~kih oscilacija i odstupanja polo`ajaalata prouzrokovana elasti~nom spregom najve}a suprepreka uve}anju performansi servo pogona u proizvodnimma{inama. Kako jo{ uvek ne postoje zadovoljavaju}are{enja, problem privla~i pa`nju velikog broja stru~njaka odkojih se o~ekuju vredni doprinosi.

Slika 2.5.1. Servopoja~ava~ki modul namenjen kori{}enju u centralizovanom sistemu za kontrolu kretanja. Modul sadr`i trikonvertora snage i digitalni pogonski kontroler koji obavlja funkcije regulisanja brzine u tri ose.
2.5 CENTRALIZOVANE I DECENTRALIZOVANETOPOLOGIJE RA~UNARA ZA UPRAVLJANJE
VI{EOSNIM KRETANJEM
Koordinacija vi{eosnog kretanja sa akcijama drugihelektri~nih i ne-elektri~nih aktuatora i izvr{nih organa uokviru proizvodne ma{ine obavlja se pomo}u centralnogra~unara (CNC). Zadaci ra~unara za upravljanje procesomse mogu podeliti na ~etiri nivoa:
Nivo 1: Servo funkcije – regulator polo`aja za svakupojedina~nu osu, generisanje. zadatih vrednostibrzine i/ili momenta pojedinih servopoja~ava~a;
Nivo 2: Generisanje trajektorije sinhronizovanog kretanja uvi{edimenzionom prostoru, interpolacija igenerisanje feed-forward kontrolnih akcija;
Nivo 3: Sekundarna detekcija i analiza gre{ke pra}enja,kompenzacija i adaptacija.
Nivo 4: Funkcije nadzora, merenja, prepoznavanjadefektnih komada i stanja.
Ve}i numeri~ki kapacitet ra~unara omogu}uje dase kroz primenu paraboli~ne, kubne, ili spline interpolacijeograni~e prvi, drugi i tre}i izvod pozicione reference [90] itime potisnu nagle promene brzine i ubrzanja i tako umanjigre{ka pra}enja zadate trajektorije. Procesni ra~unar jepovezan sa servopoja~ava~ima (elektri~nim servopogonima) pomo}u prilagodnih hardverskih modula: “osnihkartica” (axis card). U zavisnosti od vrste servopoja~ava~a,nivoa standardizacije i raspodele upravlja~kih funkcijaizme|u servopoja~ava~a i procesnog ra~unara, ovi modulimogu posedovati i) broja~ke sisteme za prihvatanje signalasa inkrementalnog enkodera za brzine do 10e6 impulsa usekundi i ubrzanja do 127e6 (impulsa /s^2), ii) A/D i D/A
konvertore rezolucije 12 do 14-b, u~estanosti odabiranja do100 kHz, iii) {irinske modulatore sa ugra|enimprogramabilnim mrtvim vremenom, iv) programabilne filtredrugog i tre}eg reda, v) trofazne strujne regulatore kao idruge funkcije i module potrebne za upravljanje kretanjem.Upravlja~ke funkcije locirane u samom servopoja~ava~u sukod centralizovanih sistema minimalne. Elektri~ni pogonizvr{ava funkcije upravljanja momentom ili brzinom, dok sezadata vrednost dobija od procesnog ra~unara. Koddecentralizovanih sistema centralni ra~unar obavljainiciranje kretanja i sinhronizaciju vi{eosnog sistema, doksu sve funkcije kontrole momenta, brzine, pozicionekontrole i interpolacije locirane u okviru elektri~nogpogona. Kod pune decentralizacije pogon je opremljen takoda samostalno obavlja funkcije inicijalne potrage zareperom (homing), prioritetnog zaustavljanja kodhavarijskih stanja, pozicioniranja vretena kodautomatizovane zamene alata, pra}enja trajektorijereferentnog enkodera, pra}enje CAM i ECAM [91] profila idruge.
Decentralizacija omogu}uje da se izbegnekaskadna struktura pozicionog kontrolera kod koga jekontura momenta i brzine locirana u servopoja~ava~u dokse diskriminacija gre{ke polo`aja, relacije pozicionogregulatora i derivacija zadate vrednosti brzine izvr{avaju uprocesnom ra~unaru (CNC). Kod decentralizovanogpozicioniranja se u lokalnu memoriju svakog elektri~nogservo pogona pohranjuju podaci o jednoj ili vi{e trajektorija.Nakon adekvatne komande generisane od strane CNC-a,pogon izvr{ava sve funkcije kontrole kretanja, uklju~uju}iinterpolaciju i relacije pozicione, brzinske i kontrolemomenta. U odnosu na kaskadnu strukturu (kod koje pogoni CNC razmenjuju informacije o zadatoj brzini i povratnojsprezi po polo`aju u realnom vremenu i ~esto putem
DBM01

standardizovanih +/-10V analognih linija) decentralizacijaomogu}uje eliminaciju ka{njenja u prenosu, ofseta, {uma igre{ke usled kvantizacije. Koncentracija svih prioritetnih
funkcija upravljanja u okviru jednog pogonskog kontroleraomogu}uje znatno uve}anje brzine i ta~nosti odziva.
Slika 2.5.2. Kaskadna struktura pogonskog kontrolera kod servopoja~ava~kog modula namenjenog kori{}enju ucentralizovanom sistemu za kontrolu kretanja. Regulator polo`aja je fizi~ki razdvojen (CNC) od regulatora struje i brzine
(servopoja~ava~).
Kod decentralizovane strukture pozicionog servo-sistema podaci i promenljive stanja motora i mehani~kogpodsistema su objedinjeni i lako dostupni (svi podaci sejedinstvenom memorijskom bloku kontrolera). Zahvaljuju}itome, olak{ana je implementacija opservera nedostupnihstanja, estimacija parametara, kao i umanjenje gre{kepra}enja zasnovano na unapred poznatoj kinematici,dinamici kretanja i prora~unu inverzne dinamikemehani~kog podsistema.
2.6. PRIMENA MA{INA ZA NAIZMENI~NU STRUJUU REALIZACIJI ELEKTRI~NIH POGONAVISOKIH PERFORMANSI
Tehnologija digitalnih kola za obradu signala irazvoj energetske elektronike imali su odlu~uju}i uticaj natopologiju i razvoj zakona upravljanja unutra{nje kontureservo sistema. Konsolidacija je u dobroj meri okon~ana: unajve}em broju primena susre}u se vektorski kontrolisaniTeslini asinhroni motori kao i sinhroni servo motori sapermanentnim magnetima na rotoru.
Teslin asinhroni motor se u prvoj polovini XX vekakoristio uglavnom u pogonima sa konstantnom brzinomobrtanja. U retkim primenama brzina mu je variranaugradnjom spolja{njeg rotorskog otpornika, promenombroja pari polova ili varijacijom efektivne vrednosti napona.Po pojavi tiristora, six-step invertora, a potom i tranzistorasnage u trofaznim invertorima, asinhroni motor se uvodi uindustriju kao motor promenljive brzine. Kontinualnapromena brzine obrtanja asinhronog motora posti`e sevarijacijom u~estanosti napajanja uz konstantan odnos U/f.Algoritmi trofazne {irinske modulacije omogu}uju da se na
izlazu tranzistorskih naponskih invertora postigne sistemslo`enoperiodi~nih napona sa fundamentalnomkomponentom ~ija se amplituda i u~estanost mogukontinualno menjati. Pored naj~e{}ih open-loop primenafrekvencijske regulacije, pod imenom scalar control [2]susre}e se i kompenzacija klizanja kao i RI kompenzacija.Ovi pristupi upravljanju Teslinim motorom nisuomogu}avali raspregnuto upravljanje fluksom i momentom.Kako je odziv frekvencijski regulisanog asinhronog motorarelativno spor, sa oscilacijama na u~estanosti klizanja ifaktorom njihovog prigu{enja koji je obrnutoproporcionalan optere}enju, to se ovakvi pogoni nisu moglikoristiti u servo aplikacijama, gde se neophodno obezbeditirasprezanje i brz odziv regulacionih kontura fluksa imomenta.
2.6.1. KORI{}ENJE ELEKTRI~NIH MOTORA ZA NAIZMENI~NU STRUJU KAO AKTUATORA MOMENTA U BRZINSKIM I POZICIONIM SERVO SISTEMIMA
Primena asinhronih i sinhronih motora uindustrijskoj automatizaciji omogu}ena je pojavom novihpristupa upravljanju [7,8]. Vektorsko upravljanje Teslinimasinhronim motorom [37] omogu}uje da se kod strujno inaponski [38] napajanih motora obezbedi rasprezanjekontura upravljanja fluksom i momentom. Ove dve veli~inezavise od komponenti vektora statorske struje [39], zapravo,od projekcija vektora magnetopobudne sile statora na vektorobrtnog polja. Odziv momenta jednozna~no je odre|enkvalitetom strujnog regulatora [42], tako da se u pogonimagde strujni regulator ima propusni opseg od 1kHz mo`eo~ekivati odziv elektromagnetnog momenta u vremenu od

150-200 µs. Imaju}i u vidu i ~injenicu da karakteristikeasinhronog motora omogu}uju veliku preopteretljivost(kratkotrajno se mogu dosti}i momenti 8-10 puta ve}i odnazivnog [43]) mo`e se zaklju~iti da je ovaj motor u sprezisa vektorskim upravljanjem idealni aktuator u servo-sistemima [44], [92]. Usavr{avanjem koncepta vektorskogupravljanja (FOC – field oriented control) razvijen jeuniverzalni vektorski kontroler [41], kod koga seupravljanje, u zavisnosti od re`ima rada pogona, koncipirana statorskom, rotorskom ili fluksu u vazdu{nom zazoru.Koncept vektorskog upravljanja primenjen je i na sinhronemotore sa permanentnim magnetima na rotoru [40], koji se
koriste u slu~ajevima kada su te`ina i gabarit motorakriti~ni, kao i u primenama koje zahtevaju da u rotoru nepostoje gubici snage. Realizacija vektorskog upravljanjazahteva:
i) Strujni regulator visokih performansi koji treba daomogu}i brze izmene amplitude i prostorne orijentacijevektora magnetopobudne sile statora; kao i
ii) Raspolo`ivost informacije o amplitudi i prostornojorijentaciji rotorskog fluksa asinhronog motora koji sevektorski kontroli{e.
M
αβisd
isq
ϑe
isd*
isq*
-dq
transformacija
transform.
dq- αβ Trofazniinvertor
isd
isq
uα*
uβ*
usd*
usq*
iβiαTERMINALNE
VELI^INE
Izra~unavanjeelektromotorne
sile statoraintegracija,
estimator fluksa
ψα s
ψβ s
iβiαψα r
ψβ r
Odre|ivanjefluksa
rotoraψrROTORSKI STATORSKI
FLUKS FLUKS
ϑe
ϑe
Odre|ivanjeamplitude iprostorne
orijentacije
Regulator
struje
Slika 2.6.1.1: Direktno vektorsko upravljanje bazirano na merenju terminalnih veli~ina.
U slu~ajevima kada se upravljanje realizujekori{}enjem invertora kao naponskog aktuatora i zadaju sekomponente Ud i Uq statorskog napona, konture fluksa imomenta nisu [93] raspregnute pa je neophodno primenitikola za rasprezanje zasnovana na poznavanju parametaramotora. Slo`ene relazije vektorske kontrole i raspre`u}ihkola zahtevaju da se u pogonima po~nu upotrebljavati brziRISC i signalni procesori za obavljanje vremenski kriti~nihfunkcija. Jednovremeno, izvr{avaju se i funkcije nadzora,komunikacije i parametrizacije, pa Zheng [94] predla`erealizaciju pogonskog kontrolera u vidu dvoprocesorskogsistema sa upravlja~kim i komunikacionim funkcijamajasno podeljenim izme|u dva procesora. Leonhard [42]pokazuje da se direktno merenje polo`aja i amplitude fluksaza potrebe vektorske kontrole ne mo`e realizovati. Ugradnjanaro~itih detektora magnetnog polja u zazor ma{inezahtevala bi da asinhroni motori za vektorsko upravljanjebudu naro~ito gra|eni – nestandardni. Tako|e, efekti fluksarasipanja, lokalnog zasi}enja i o`ljebljenja na signal izmonokristalnih Hall elemenata za merenje polja rezultujupogre{kama u proceni prostorne orijentacije fluksa.Ugradnja amorfnih poluprovodni~kih traka u vazdu{ni zazornapu{tena je iz sli~nih razloga, kao i nastojanja [97] da sedetekcija polo`aja fluksa olak{a naro~itim sekcionisanjemstatorskih namotaja asinhronog motora. Prakti~nu primenunalaze algoritam indirektnog vektorskog upravljanja (IFOC– indirect field oriented control) i direktno vektorskoupravljanje (DFOC – direct field oriented control) [21],[32] koji se me|u sobom razlikuju isklju~ivo po na~inu nakoji se dolazi do podatka o prostornoj orijentaciji fluksa. U
oba slu~aja se orijentacija odre|uje indirektno (t.j. ne vr{i semerenje polja) pa nazive IFOC/DFOC treba uslovnoprihvatiti. U slu~aju DFOC, komponente vektora statorskogfluksa izra~unavaju se na osnovu merenja terminalnihveli~ina (struja i napona ma{ine) i prora~una statorskihjedna~ina naponskog balasna, dok se kod IFOC pristupaprostorna orijentacija rotorskog fluksa odre|uje na osnovuugaone brzine obrtanja rotora, statorskih struja i jedna~inanaponskog balansa u rotoru. Direktno upravljanje nezahteva primenu senzora na osovini, ali impliciraintegraciju terminalnih napona. Potreba za poznavanjemta~ne vrednosti otpora statorskih namotaja, problem ofsetakod integracije i nesavr{enost (mrtvo vreme) konvertorasnage ~ine direktno upravljanje neprimenljivim za brzinebliske nuli [95]. Pored toga, orijentacijom prema poljustatora stvara se sprega moment-fluks [96] pa je neophodnoprimeniti naru~ite, parametarski osetljive strukture zarasprezanje [98]. Dobre strane direktne vektorske kontrolesu robusnost u odnosu na varijacije parametara rotorskogkola [99] i spremnost za rad bez dava~a brzine, pa se ovajna~in upravljanja mo`e uspe{no primeniti kod pogona kojine zahtevaju rad u oblasti malih brzina.
Direktno (DFOC) i indirektno (IFOC) vektorskoupravljanje zasnovano je na pretpostavci da u magnetnomkolu ma{ine postoji polje okarakterisano amplitudom iprostornom orijentacijom. Projekcije statorske struje napravac polja odre|uju amplitudu fluksa i elektromagnetnogmomenta koji se u ma{ini razvija. Neposredno nakonuklju~enja pogona u magnetnom kolu asinhrone ma{inepolje jo{ uvek ne postoji, pa razlaganje vektora struje na

magnetizacionu i aktivnu komponentu nema smisla jer jeprostorna orijentacija fluksa neodre|ena. Bave}i seproblemima robusnosti i globalne stabilnosti vektorskogkontrolera u tranzijentnim stanjima, Garigan [188] pokazujeda se kod polaska javljaju neprihvatljive oscilacije momentai ekscesne vrednosti klizanja. Ovi ne`eljeni efekti se mogueliminisati primenom specifi~ne sekvence uklju~enja
vektorski kontrolisanog motora u pogon. U osnovi [188],potrebno je zadatu vrednost mometa i unutra{nju komanduklizanja zadr`ati na nuli sve do uspostavljanja nominalnevrednosti fluksa u ma{ini. Po isteku vremena pribli`nojednakog rotorskoj vremenskoj konstanti, vektorskikontrolisani pogon mo`e zapo~eti normalan rad.
ids* +
-
RL
L Lr
m
m r
*
*
* + µ
iqs*
∫+
+
ωr
Ψdr
ωk ωe θe
im =f(Ψm)Lm
* =f(Ψm)
im
-idrRr
*
Lµr
Ψdr’
∫
+
+Ψm
Lm*
Procenjeni otpor rotora Rr*
%
Slika 2.6.1.2: Odre|ivanje amplitude i orijentacije rotorskog fluksa kod indirektnog vektorskog upravljanja zahtevapoznavanje parametara rotorskog kola i modelovanje nelinearnosti (zasi}enja) magnetnog materijala.
2.6.2. PROBLEM PARAMETARSKE OSETLJIVOSTIINDIREKTNOG VEKTORSKOG UPRAVLJANJA IALGORITMI ZA AUTOMATSKU KOMPENZACIJU
Indirektno vektorsko upravljanje zahteva upotrebusenzora na osovini. Ono ne uklju~uje merenje i integracijustatorskih napona pa je regulisanje fluksa i momentamogu}e i pri brzini jednakoj nuli. IFOC struktura jeprimerena pozicionim i brzinskim servo sistemima kojiredovno poseduju osovinski dava~ i zahtevaju rad u oblastimalih brzina. Ovakvo upravljanje u svrhu izra~unavanjaprostorne orijentacije fluksa zahteva poznavanje parametararotorskog kola (Rr, Tr) [110]. Gre{ke u proceni vremenskekonstante rotora Tr dovode do ne`eljene sprege [115]izme|u kontura fluksa i momenta u stacionarnom stanju iprelaznim procesima, pa je odziv motora oscilatoran inepogodan za servo primene.
Uticaj varijacije induktivnosti rasipanja na IFOCstrukure je zanemariv [120]. Promene otpornosti Rr
prouzrokovane fluktuacijama temperature i u~estanosti[112] kao i varijacije me|usobne induktivnosti u oblastislabljenja polja [119] bitno uti~u na karakteristike IFOCpogona. U slu~aju velikih odstupanja, pored pojaveoscilatornog odziva, uve}avaju se i gubici snage u motoru,umanjuje preopteretljivost pogona i javlja mogu}nostnestabilnog rada brzinskog ili pozicionog regulatora.Osetljivost pogona na varijacije parametara rotorskog kolapogotovu je izra`ena kod pogona ve}ih snaga [102].Nelinearnost karakteristike magne}enja mogu}e jekompenzovati kori{}enjem inapred pripremljenih podatakajer se ne o~ekuje njena izmena u toku rada pogona. Dvo-parametarska aproksimacija karakteristike magnetizacije
daje zadovoljavaju}e rezultate kod ve}ine pogona relativnomale (<5 MNOM) preopteretljivosti [121]. Levi [127,128]pokazuje da kod velikih vrednosti Mem i q-struje odzivdegradira zbog sprege uzajamno normalnih osaprouzrokovane nelinearno{}u magnetnog materijala (cross-saturation), pa je ovu pojavu neophodno modelovati[122,123] i kompenzovati.
Uticaj odstupanja parametera (detuning) se mo`eubla`iti prilago|enjem koeficijenata regulacije [113], ali sere{enja adekvatna servo aplikacijama posti`u jedinoprimenom algoritama za identifikaciju i korekciju.Inicijalno pode{avanje i odre|ivanje rotorskih parametaramotora van pogona je potrebno [105], ali je od su{tinskogzna~aja projektovanje i primena algoritma za korekciju utoku rada [100]. Injekcija adekvatnog test signala [106]omogu}uje da se parametri odrede u bilo kom radnomre`imu. Matsuo [101] predla`e utiskivanje inverznekomponente obrtnog polja i odre|ivanje rotorskog otpora izdetektovane inverzne komponente odziva motora. Parametrise mogu odrediti i na osnovu merenja odziva nasporopromenljivi test signal (6Hz) dodat magnetizacionojkomponenti statorske struje [114]. Nedostatak metodazasnovanih na test signalu je pojava ne`eljenih oscilacijamomenta, brzine i polo`aja na u~estanosti test signala, {to jekod servo sistema neprihvatljivo. Zai [104] predla`eatraktivno re{enje u kome se kao test signal koristi uvekprisutni PWM {um konvertora snage. Na takav na~in, usistem se ne injektuju nikakve dodatne smetnje ve} sekoristi nesavr{enost naponskog izvora (trofaznogtranzistorskog VSI). Ukoliko se komutacioni {umkonvertora snage koristi kao test signal, rezultatidentifikacije parametara su vrednosti koje otpornosti i

induktivnosti imaju na relativno visokim u~estanostima (1-20 kHz). Usled potiskivanja rotorske struje iz dubine `lebaka me|ugvo`|u (skin-efekat), rotorski namotaj mo`estrujama visoke u~estanosti pru`ati otpor koji je znatno ve}i[129] od otpora strujama uobi~ajene radne u~estanosti.
Kako je za odre|ivane frekvencijske zavisnosti Rr(f)potrebno poznavati detalje konstrukcije rotora i oblik `leba,Zai-jevo re{enje [104] nije na{lo {iru primenu.
strujniregulator
ids*
iqs*
korelacioniblok
PI regraèunklizanja
Tr*
ωr
ωe
generatortest signala
+
ωREF
∆ω r∆ids
limit
M3~
+
+
-
Slika 2.6.2.1: Identifikacija elektri~nih parametara rotorskog kola asinhronog motora zasnovana na injektovanju testsignala u struju magnetizacije.
Garces [103] predla`e da se odre|ivanje rotorske
vremenske konstante vr{i za vreme kvazi-stacionarnih stanjapogona na osnovu konfrontacije izmerene i o~ekivanereaktivne snage pogona. Niz autora predla`e razli~itevarijante identifikacije i korekcije Tr u toku rada pogona[107], [108], [109],[117],[118] zasnovane na merenjuterminalnih veli~ina (napona i struja statorskog namotaja),estimaciji fluksa, momenta, aktivne ili reaktivne snage, ipore|enjem sa analognim veli~inama odre|enim u modelurotorskog kola. Kod pogona ~iji je moment optere}enjalinearna funkcija brzine obrtanja [111] ili jesporopromenljivog karaktera [116], problem identifikacijerotorske vremenske konstante se lak{e re{ava, naro~ito uslu~ajevima srednjih i malih nazivnih snaga pogona.Vektorsko upravljanje asinhronim motorima velike snageote`ano je problemom zavisnosti rotorske vremenskekonstante i otpora rotora od u~estanosti klizanja [124,129].Relativno velike dimenzije rotorskog `leba i provodnikarotora kod motora velike snage i skin-efekat uzrok suzna~ajnih frekvencijskih varijacija parametara rotora.Znatna odstupanja parametara detektuju se ~ak i zarelativno male rotorske u~estanosti [129] reda nominalnogklizanja, pa se skin-efekat mora uzeti u obzir kodidentifikacije [125]. U ekstremnim slu~ajevima (izuzentovelike snage i/ili rotorski `leb velike dubine) korekcijarotorske vremenske konstante ne omogu}ava raspregnutoupravljanje momentom i flusom, ve} se strukturavektorskog kontrolera mora modifikovati [126] tako {to serotorsko kolo modeluje kao mre`a vi{e spregnutih kontura.
Metode za korekciju odstupanja rotorskihparametara, koncipirane na merenju terminalnih veli~ina,informacije o stanju motora obezbe|uju krozelektromotornu silu indukovanu u statorskim namotajima (es
= Ψr ωr). Rad u oblasti malih brzina i malih vrednostielektromotorne sile ote`ava odre|ivanje stanja motora.Nesavr{enost konvertora snage (mrtvo vreme) i varijacije
parametara statorskog kola (Rs) ~ine da odre|ivanjeparametara u oblasti malih brzina u praksi bude neostvarivo.Kako su glavne primene vektorski (IFOC) kontrolisanihasinhronih motora brzinski i pozicioni servomehanizmi, kojizahtevaju regulisanje momenta i fluksa i kod zaustavljenogrotora, neophodno je razviti algoritme za odre|ivanje ikorekciju rotorskih parametara koji se ne}e oslanjati namerenje terminalnih napona. Razli~ita re{enja predlo`ena suod strane velikog broja istra`iva~a [101-118]. Razmatra se imogu}nost identifikacije zasnovana na odre|ivanja stanjamotora pomo}u ve{ta~ke neuronske mre`e [51]. Kako jepotrebno broj senzora u okviru pogona svesti na minimum,prednost imaju re{enja koja ne zahtevaju nikakva merenja iinformacije osim onih ve} prisutnih u strukturi indirektnogvektorskog regulatora. Polaze}i od podatka o polo`ajuosovine i procene inercije obrtnih masa mogu}e je graditiestimator elektromagnetnog momenta. Prisustvo zadate irealizovane vrednosti momenta u memoriji pogonskogkontrolera otvara mogu}nost da se u toku rada odredilinearizovana funkcija prenosa [102] pogona. Analiza nekihdiskretnih karakteristika ove funkcije (pre svega varijacijafaze u zoni u~estanosti klizanja) daje indikaciju o promeniparametara rotorskog kola i mo`e poslu`iti kao osnov zanjihovu korekciju u toku rada pogona [130].
Kelley [140] razmatra mogu}nost da se varijacijaparametara rotorskog kola odredi na osnovu frekvencijskezavisnosti impedanse motora. Spektar statorskog naponaposeduje relativno veliku energiju raspodeljenu u oblasti odnule do nekoliko kiloherza. Specifi~an spektar terminalnihveli~ina zahteva da se njihova analiza vr{i metodomparametarske estimacije [150] ili primenom SSA algoritama(klizanjem). Podaci o frekvencijskom sastavu terminalnihnapona i struja omogu}uju da se izra~una promenaimpedanse motora u funkciji u~estanosti. Varijacijaimpedanse mo`e, pod odre|enim uslovima [140], biti

osnova za procenu temperature rotora i kompenzacijutemperaturnih promena rotorske vremenske konstante.
Savremena re{enja za identifikaciju vremenskekonstante rotora uklju~uju paralelan rad dva ili vi{emehanizama, od kojih svaki odre|uje TR pod odre|enimuslovima i ne obezbe|uje rad u svim o~ekivanim re`imima.Konkurentno izvr{avanje ovih algoritama uz selekcijuupravlja~kih i korektivnih dejstava u skladu sa radnimre`imom mo`e rezultovati robusnom identifikacijom TR usvim uslovima. Langovski [184] predla`e paralelnustrukturu za odre|ivanje fluksa i parametera motora sanaponskim i strujnim referentnim modelom.Zadovoljavaju}i rezultati posti`u se varijacijom poja~anja ukorektivnim granama u funkciji radnog re`ima.
Rad u oblasti identifikacije parametera asinhronihmotora u toku rada i u fazi instalacije nije okon~an.Postoje}i algoritmi ne obezbe|uju samostalno pode{avanjepogona bez u~e{}a operatora, ne pokazuju robusnost u svimradnim re`imima ili zahtevaju ugradnju dodatnih senzora,pa se o~ekuju novi, efikasni i pouzdani algoritmi.
2.6.3. PROBLEMI PRIMENE SINHRONIH SERVOMOTORA SA PERMANENTNOM POBUDOM
Sinhroni motori sa permanentnim magnetima (PM)na rotoru [5] nalaze {iroku primenu u servo pogonima snagedo 10 kW. Razvoj novih magnetnih materijala omogu}ujeizradu sinhronih PM motora velike specifi~ne snage i maleinercije. NdFeB magneti daju karakteristike za oko 30%bolje od SmCo materijala. Maksimalna dozvoljenatemperatura magneta koja jo{ uvek ne dovodi dodeformacije karakteristike magnetizacije (B-H) uve}ana jena 135oC, ~ime je pove}ana i dozvoljena gustina struje kao isnaga motora. Na~in na koji su magneti ugra|eni bitno uti~ena karakteristike ovih motora. Kod povr{inske monta`erotor je skoro izotropan, pa su induktivnosti u d- i q-osipribli`no jednake (LD = LQ). U slu~aju ugradnje magneta uunutra{njost magnetnog kola rotora, mogu}a jekonfiguracija sa tangencijalnom i radijalnommagnetizacijom. Kod tangencijalne magnetizacije(‘koncentracija fluksa’) je LD > LQ, dok se kod radijalnemagnetizacije postoji anizotropija sa LD < LQ. Statorskinamotaj mo`e biti realizovan tako da indukovanaelektromotorna sila ima trapezni ili sinusoidalni oblik. Podimenom Brushless DC Motor podrazumeva se sinhronimotor sa skoncentrisanim statorskim namotajem prostornogkoraka 180o. Trapezni oblik elektromotorne sile omogu}avaodre|ivanje polo`aja rotora na osnovu faznog stava tre}egharmonika [28], eliminaciju dava~a polo`aja i realizacijuregulisanog pogona sa samo jednim strujnim senzorom ume|ukolu pogonskog pretvara~a. Prekida~i snage upogonskom konvertoru koji napaja brushless DC motorprovode u toku jedne tre}ine periode statorskog napona.Provo|enje u intervalima 120o i nedostatak mogu}nostidemagnetizacije ograni~ava rad brushless DC motora u zonislabljenja polja (konstantne snage) {to njihovu primenuograni~ava na pogone konstantnog momenta.
Slika 2.6.3.1. Magnetno kolo rotora kod sinhronogmotora sa permanentnim magnetima montiranim na
povr{inu rotora.
Rad u oblasti slabljenja polja je kod sinhronihservo motora sa tangencijalnom magnetizacijom olak{anrelativno velikom (LD > LQ) induktivno{}u u d-osi. Primenavektorske kontrole i kod ovih pogona omogu}ujerasprezanje kontura momenta i fluksa. Prisustvoreluktantnog momenta (LD > LQ) kod ovih motora uve}avaukupni raspolo`ivi moment, koji je ve}i nego u slu~ajuizotropne strukture rotora. Raspolo`ivi moment se mo`edalje uve}ati primenom algoritma za direktnu kontrolumomenta (DTC) [55]. Zbog razli~itog magnetnog otpora ud- i q-osi, maksimalni odnos Nm/A dobija se kada je ugaoizme|u vektora rotorskog fluksa i statorskemagnetopobudne sile razli~it od π/2. Motori sa unutra{njommonta`om magneta imaju manju valovitost momenta i boljirad pri velikim brzinama, pa se koriste u primenamaosetljivim na valovitost momenta i pogonima visokihperformansi i velikih brzina. Kompaktnost, mala inercija ivelika specifi~na snaga motora sa povr{inskom monta`ommagneta omogu}uje njihovu primenu u slu~ajevima kada supotrebne izuzetno velike vrednosti ubrzanja i rad u re`imukonstantnog momenta, kao {to su primene u industrujskimmanipulatorima. U ovim primenama sinhroni motori sapermanentnim magnetima potiskuju asinhrone motore imotore jednosmerne struje sve do snaga 10-30 kW.Permanentno pobu|eni (PM) sinhroni motori snaga preko 30kW se veoma retko sre}u.
Slika 2.6.3.2. Magnetno kolo rotora kod sinhronog motorasa permanentnim magnetima montiranim u unutra{njost
magnetnog kola rotora.
Performanse savremenih servo sistema sasinhronim PM motorima [5,10] su umanjene prisustvomvalovitosti (ripple) elektromagnetnog momenta. Valovitostmomenta je slo`eno-periodi~na parazitna komponentamomenta superponirana na `eljeni/zadati moment. Srednjavrednost ove parazitne komponente jednaka je nuli, i onamo`e biti tretirana kao deterministi~ki {um. U~estanostne`eljene komponente momenta se veoma ~esto nalazi van

propusnog opsega servo konture, pa se njen uticaj na brzinuobrtanja i polo`aj rotora / alata ne mo`e kompenzovatidelovanjem regulatora. U ekstremnim slu~ajevima primenesinhronih PM motora u ma{inskoj obradi materijala, motorostavlja karakteristi~an “potpis” na predmetu obrade. Tri suosnovna uzroka pojave valovitosti momenta:
i) Interakcija prostornih harmonika talasamagnetopobudne sile statora (MMF) i prostornih harmonikatalasa magnetne indukcije (B) u zazoru (prouzrokovaneprisustvom permanentnih magneta) dovodi do pojavetakozvane ‘elektromagnetne valovitosti’. Kod motora kodkojih bilo B(θ) ili MMF(θ) imaju prostoperiodi~nuraspodelu (bez vi{ih prostornih harmonika),elektromagnetna valovitost se ne pojavljuje. Kona~an brojstatorskih `lebova onemogu}ava idealnu, sinusoidalnuraspodelu gustine statorskih provodnika po obimu ma{ine,pa je prisustvo vi{ih prostornih harmonika MMF(θ)neminovno. Problemi ugradnje magneta uzrok su pojavivi{ih harmonika u raspodeli B(θ) (izuzetak ~ine motori saferitnim rotorom kod kojih se magnetizacija obavljanaknadno). U~estanost parazitnih komponenti momentazavisi od prostornih perioda vi{ih harmonika B(θ) i MMF(θ)kao i od brzine obrtanja motora. Najizrazitija komponenta[139] poseduje u~estanost {est puta ve}u od u~estanostiobrtanja rotora. Elektromagnetna valovitost jeproporcionalna amplitudi statorske struje i srednjojvrednosti razvijenog momenta, tako da su njeni efekti kodrastere}enog motora veoma mali.
ii) Anizotropija prouzrokovana o`ljebljenjemstatora i specifi~nim oblikom magnetnog kola rotoraprouzrokuje pojavu reluktantne valovitosti momenta. Uma{ini kod koje magnetni otpor varira u zavisnosti odrelativnog polo`aja rotora i statora, rotor te`i da zauzmepolo`aj u kome }e magnetni otpor u osi pobu|enogstatorskog namotaja biti minimalan a njegova induktivnostmaksimalna. Reluktantna valovitost momenta imaamplitudu proporcionalnu kvadratu statorske struje, dok joju~estanost zavisi od geometrije ma{ine (broja `lebova) ibrzine obrtanja rotora.
magneti`leb
stator
rotor
Slika 2.6.3.3: Valovitost momenta usled interakcije magnetai statorskih `lebova (cogging – detent torque).
iii) Magnetna valovitost (cogging, detent torque)ne zavisi od statorske struje i postoji i u situacijama kada jestatorska struja jednaka nuli [53]. Segmenti permanentnihmagneta na rotoru te`e da se stave u polo`aj minimalnogmagnetnog otpora, pa se javlja moment koji te`i damagnetne segmente postavi naspram statorskog zupca,izbegavaju}i polo`aj naspram `leba, gde je magnetni otporna putu fluksa veliki. Kao rezultat, javlja se parazitna
komponenta momenta ~ija u~estanost zavisi od broja`lebova i segmenata permanentnih magneta. Valovitostmotora se mo`e umanjiti zahvatima u konstrukciji motora,dok se valovitost momenta kod postoje}ih motora mo`ekompenzovati [139] modifikacijom struje statora: na osnovuprethodnih merenja, odre|ujuje se u~estanost, amplituda ifaza vi{ih harmonika koje treba dodati prostoperiodi~nomobliku statorske struje kako bi ne`eljene oscilacije momentabile umanjene ili eliminisane. Kompenzacija parazitnihefekata u cilju pobolj{anja performansi servo pogona sasinhronim PM motorom zahteva napredne pristupemodelovanju proceni parametara motora [131]. Poredvalovitosti momenta, u obzir je potrebno uzeti i sistemskaka{njenja, nesavr{enost {irinske modulacije i konvertorasnage [135]. Problem maksimizacije brzine i kvalitetaodziva u uslovima nesavr{enosti i promenljivih parametaramotora, konvertora i senzora uspe{no se re{ava primenomalgoritma za prilago|enje i kompenzaciju zasnovanog nave{ta~koj neuronskoj mre`i [50].
2.6.4. PROBLEM UPRAVLJANJA STATORSKOMSTRUJOM U VEKTORSKI KONTROLISANIMELEKTRI~NIM POGONIMA SA MOTORIMA ZANAIZMENI~NU STRUJU
Elektromagnetni moment elektri~nih ma{ina zanaizmeni~nu struju mo`e se odrediti kao vektorski proizvodrotorskog fluksa i vektora statorske struje. Imaju}i u vidubrzinu promene statorske struje, varijacije fluksa se moguokarakterisati kao sporopromenljive, pa se mo`e smatratida je odziv momenta elektri~nog servo pogona jednozna~noodre|en karakteristikama strujnog regulatora. Relativnospore promene brzine obrtanja i fluksa omogu}uju da se, zapotrebe sinteze regulatora struje, motor modeluje kaotrofazno induktivno-otporno optere}enje konvertora [178](Slika 2.6.4.1).
Merenje statorske struje se naj~e{}e obavlja uzkori{}enje strujnog senzora sa Hall-ovim efektom – DCstrujnog transformatora. Alternativno, ova vrsta senzora semo`e kod pogona manjih snaga zameniti {antom. Potrebnoje meriti najmanje dve od tri fazne struje ~iji spektaruklju~uje znatan {um na u~estanosti komutacije.Komutacioni {um je mogu}e potisnuti odabiranjem struja ucentru naponskih impulsa ili lokalnim usrednjavanjem [172](usrednjavanjem u okviru jedne periode komutacijekonvertora). Specifi~an zahtev za lokalnim usrednjavanjem~ini naro~ito pogodnim na~in merenja struje u kome sesignal sa serijskog otpornika – {anta konvertuje u povorkuimpulsa (U/f konverzija), a potom na galvanski izolovanna~in prenosi (opto-coupler) do broja~kog sistemamikrokontrolera koji akcijom zbrajanja impulsa zapravomeri srednju vrednost struje u protekloj periodi odabiranja.
Problemi komutacionog {uma, anti-alias filtracijei pribavljanja signala povratne sprege u pogonskomkontroleru bez ka{njenja u~inili su da prve primeneelektri~nih servo pogona sa asinhronim i sinhronimmotorima budu realizovane sa analognim strujnomregulatorima. U ovim primenama, pogonski kontrolerizra~unava `eljenu vrednost fazne struje i saop{tava jeanalogno implementiranom regulatoru preko namenskogD/A konvertora. Jednostavnost strujne regulacije zasnovanena komparatorima sa histerezisom rezultovala je njihovom{irokom primenom [200,210,215]. Kod ovih regulatora,veli~ina histerezisa, indeks modulacije i induktivnost

rasipanja motora odre|uju komutacionu u~estanost.Ne`eljene varijacije u~estanosti komutacije mogu seukloniti modifikacijom regulatora i uvo|enjem faznospregnute petlje [204,211]. Kazimierkowski [233] i Tripathi[232] pokazuju da se konstantna u~estanost komutacijemo`e obezbediti varijacijom histerezisnog praga uzavisnosti od indeksa modulacije i parametara motora.Rezultati [232],[209] pokazuju da strujni regulator sahisterezisom omogu}uje dostizanje brzine odziva ipropusnog opsega koji se ne mogu posti}i primenomsavremenih re{enja digitalne strujne regulacije. Ova osobinaregulatora sa histerezisom ~ini ih naro~ito pogodnim zaprimene gde je u namotaje motor potrebno injektovati struju~ija promena nije prostoperiodi~na, kao {to je slu~aj kodprekida~kih reluktantnih motora. Negativne osobine ovihregulatora su zavisnost komutacione u~estanosti odinduktivnosti rasipanja motora, {to za posledicu ima potrebu
za pode{avanjem veli~ine histerezisa kod svake izmenemotora. U slu~aju kada su konvertor i motor povezanirelativno duga~kim kablom znatne oto~ne kapacitivnosti,ekvivalentna induktivnost koja optere}uje konvertor jeznatno umanjena, u~estanost komutacija kod regulatora sahisterezisom mo`e nekontrolisano porasti i dovesti dotrajnog o{te}enja poluprovodni~kih prekida~a snage. Ovapojava se mo`e eliminisati time {to se, umesto histerezisa,komutaciona u~estanost ograni~i uno{enjem vremenskogka{njenja u konturu regulacije [209]. Nagy [250] pokazujeda strujni regulator sa histerezisom ima deterministi~kikarakter, ali mu je osetljivost na po~etne uslove tako velikada pripada klasi haoti~nih sistema. Primene saznanja izoblasti teorije haosa mo`e unekoliko popraviti karakteristikeovog strujnog regulatora i eliminisati negativne osobinespektra izlaznog napona.
Slika 2.6.4.1: Upro{}enje modela trofaznog motora za potrebe analize i sinteze regulatora statorskih struja.
uaubuc
M3~
PWM VSIPWM VSI
Ispravlja~3~
dc medjukolo
CL
Rk
CRPWM
i a*
i b*
i c*
+
- +
- +
-
TaTb
Tc
Regulator sa histerezisom
Slika 2.6.4.2: CRPWM – Current Regulated Pulse Width Modulated VSI – Trofazni invertor sa lokalnom povratnomspregom po struji i analognim strujnim regulatorom koji primenjuje komparatore sa histerezisom.
Brod [201] i Schonnung [214] da se zadovoljavaju}eregulacione karakteristike i diskretan spektar mogu dobitiako se u upravljanju konvertorom koristi {irinski modulator~iji je modulacioni signal dobijen na izlazu IP regulatorastruje. Izlazni napon prakti~no ne poseduje nikakveharmonijske komponente u opsegu u~estanosti odfundamentalne do komutacione. Holtz [202] pokazuju da se
ka{njenja u konturi za regulaciju struje negativnoodra`avaju na performanse i mogu prouzrokovati pre svegaznatnu faznu gre{ku. Odstupanja u fazi za posledicu imajupogre{nu prostornu orijentaciju vektora magnetopobudnesile statora i ne`eljenu spregu kontura fluksa i momenta koddirektnog i indirektnog vektorskog upravljanja. U ciljuuklanjanja ovih efekata, Lorenz [208] predla`e da se, na

bazi informacija o stanjima i parametrima, izvr{i predikcijastruje i na taj na~in kompenzuju efekti ka{njenja. Isti autor[213] pokazuje da se topologija trofaznog konvertora zarezonantnim me|ukolom mo`e upotrebiti kao aktuatorstrujnog regulatora, pri ~emu se dobijaju performanseuporedive sa slu~ajem primene hard-switchedkonvencionalnog konvertora. Temple [260] pokazuje da sekarakteristike strujno regulisanih pogonskih konvertora(CRPWM) mogu pobolj{ati uvo|enjem novih vrstapoluprovodni~kih prekida~a (mos-kontrolisani tiristor).Specifi~nosti i ograni~enja novih prekida~a zahtevaju novipristup realizaciji {irinske modulacije i uti~u na struktururegulatora struje. U slu~ajevima kada ispravno obavljanjekomutacije zahteva generisanje unapred odre|ene sekvenceupravlja~kih impulsa, ograni~enje minimalnog vremenavo|enja ili odmaranja, analogna implementacija strujnogregulatora i modulatora je skop~ana sa pote{ko}ama, pa je utakvim slu~ajevima neophodno ove funkcije poveritidigitalnom pogonskom kontroleru. Upravlja~ka akcijadigitalnog strujnog regulatora i njegov odziv su neminovnosporiji u odnosu na analognu realizaciju, ali se on sve ~e{}ekoristi zbog fleksibilnosti koja kod analognih regulatora nijeprisutna.
Potreba da se strujni regulator prilagodi motorudelovanjem na otpornike i potenciometare negativna jestrana svih analognih regulatora struje. Njihov nedostatak jei taj {to zadatak upravljanja obavljaju operi{u}i sa faznimveli~inama u statorskom, nepomi~nom koordinatnomsistemu. Zadate vrednosti struje su u stacionarnom stanjuprostoperiodi~ne pa primena IP regulatora ne mo`eobezbediti da strujna gre{ka u stacionarnom stanju budenula. Rowan [203] i Schauder [216] predla`u da se zadatakstrujne regulacije obavlja u sinhronom d-q koordinatnomsistemu, u kome su kod stacionarnog stanja zadate vrednostistruja iD i iQ nepromenljive, pa integralno dejstvoobezbe|uje da u stacionarnom stanju ne bude strujne gre{ke.Sinhroni strujni regulator podrazumeva digitalnuimplementaciju algoritma i re{avanje probleme akvizicijesignala povratne sprege, njihove obrtne transformacije usinhroni koordinatni sistem, kao i docnije inverznetransformacije upravlja~kih varijabli iz sinhronog ustacionarni koordinatni sistem. Ka{njenja usled neophodneobrade signala naru{avaju kvalitet odziva i moraju biti uzetau obzir u fazi projektovanja [212]. Konvencionalni IP
regulator ne mo`e u potpunosti zadovoljiti novonastaleupravlja~ke zadatke. Ben-Brahim [234] istra`ujemogu}nosti za primenu dead-beat regulacije sa opserveromi predikcijom struje. Pokazuje se da ovakav pristup nemaprakti~nu primenu zbog izuzetno velike osetljivosti navarijacije parametara motora: promena u iznosu od 7%mo`e rezultovati nestabilnim odzivom. Dead-beatregulacija ne daje pozitivne efekte i zbog toga {to jerazpolo`ivi napon na izlaznim priklju~cima aktuatora -konvertora snage ograni~en i ne mo`e dosti}i vrednosti kojeregulator zahteva. Buhl [235] ista`uje mogu}nosti da sefleksibilnost neuronske mre`e iskoristi u realizacijiregulatora umanjene osetljivosti na varijacije parametaramotora. Strujni regulator zasnovan na primeni ve{ta~keneuronske mre`e (VNM) razvijen je u laboratorijamanema~kih vojnih {kola (University of Fedral Forces). VNM-strujni prediktor izra~unava o~ekivane vrednosti struje unaredna ~etiri koraka. Predikcija omogu}uje da se unapredodrede i budu}e komutacije prekida~a u konvertoru, pa jemogu}e umanjiti broj komutacija u jedinici vremena.Jednovremeno se posti`e i umanjenje odstupanja strujnogvektora od zadate trajektorije, {to pokazuje da superformanse regulatora upotrebom VNM-prediktora vidnopobolj{ane. Briz [178] stvara metod kompleksnih vektora ianalizira njegove prednosti u analizi i sintezi naprednihstruktura digitalnih strujnih regulatora. Metod kompleksnihvektora omogu}uje umanjenje ne`eljene sprege izme|uregulatora struje u d- i q-osi.
Harnefors [141] primenjuje teoriju unutra{njegmodela (IMC – Internal Model Control) u sintezi digitalnihstrujnih regulatora i posti`e zavidne rezultate u rasprezanjupojava u d- i q-osi u stacionarnom stanju i pri prelaznimprocesima. U funkciji prenosa potrebno je uo~iti dinamikukoju nije mogu}e invertovati (ka{njenja, elementi saneminimalnom fazom, nule u desnoj poluravni) i izdvojiti jeod ostatka. Preostali deo funkcije se invertuje i kompenzujeuno{enjem polova na visokim u~estanostima radibalansiranja reda polinoma u brojiocu i imeniocu. Ovakoure|ena funkcija se koristi kao redni kompenzator unutarIMC strukture. Re{enje pokazuje robusnu sposobnostrasprezanja odziva u d- i q-osi, {to ostala re{enja u tokuprelaznih procesa nisu mogla posti}i.
Estimator/opserverveli~ina koje nije mogu}e
direktno meriti
ME\UKOLOOPTERE]ENJE
MOTORElektri~ni i meha-ni~ki podsistem
Dava~i
Terminalneveli~inestruje inaponi
Upravlja~kapromenljiva:
jedan od sedamraspolo`ivih
vektora napona
Zadata vrednostelektromagnetnogmomenta i fluksa
NAPONSKI
INVERTOR
TROFAZNIDIREKTNO UPRAVLJANJE:Selekcija sekvencediskretnih vektora
napona koji umanjujudetektovana odstupanja
Mereni signali
Slika 2.6.4.3: Direktno upravljanje momentom (DTC) – momentni modulator.

Izdvajanje strujnog regulatora u naro~itu,unutra{nju konturu regulacije se kod savremenih digitalnoupravljanih pogona ~esto izbegava. Hijerarhijaunutra{njih/spolja{njih kontura regulacije, tipi~na zakaskadnu realizaciju dovodi do suboptimalnog pona{anja iodziva. Digitalni pogonski kontroler i pogonski konvertorna pona{anje elektri~nog i mehani~kog podsistema mogudelovati isklju~ivo putem varijacije napona na priklju~cimastatora. Upravlja~ka varijabla – napon statora – mo`e sedirektno udrediti tako da zadovoljava zahtev upravljanja iminimizira odstupanje brzine, momenta ili fluksa od `eljenetrajektorije. Zaseban strujni regulator kod ovakvog konceptaupravljanja nije potreban. Potrebno je definisati `eljenokretanje sistema, odrediti kriterijumsku funkciju (primer:zbir kvadratnog odstupanja momenta i fluksa od zadatihvrednosti) a potom odrediti upravljanje. Kako upravlja~kapromenljiva (vektor napon na izlaznim priklju~cima
konvertora) ima mali broj (7) diskretnih vrednosti, potrebnoje odabrati jedan od 7 raspolo`ivih vektora tako da sekriterijumska funkcija svede na minimum u {to kra}emvremenu.
Direktno upravljanje momentom (DTC – Directtorque control), prema izve{tajima ve}eg broja istra`iva~a[55, 175, 224] omogu}uje da odziv pogona postane znatnobolji od odziva konvencionalnih struktura. Shao [176]pokazuje da direktno upravljanje momentom u odnosu nakaskadnu strukturu sa izdvojenim strujnim regulatorom dajemanju valovitost elektromagnetnog momenta, mirniji radpogona u oblasti malih brzina, jednostavniju kompenzacijumrtvog vremena i dostizanje ni`ih brzina bez dava~a naosovini. Razvoj ‘direktnih’ pristupa upravljanju pogonom injihova optimizacija predstavljaju {iroko polje za daljiistra`iva~ki rad.
α
β
θV
1
V2
V6
V3
V5
V4
V0
V7
r
u r
V1d
1
V2d2sektor
1
2
3
4
5
6
Slika 2.6.4.4: DTC – momentni modulator za svaki komutacioni interval vr{i selekciju sekvence naponskih vektora tako dase minimizira kriterijumska funkcija – naj~e{}e kvadratno odstupanje fluksa i momenta od `eljenih vrednosti. Sekvenca
ilustrovana na slici uklju~uje vektore V1 (100), V2 (110) i V0 (000).
2.6.5. ELEKTRI~NI POGONI VELIKE SNAGE I VISOKIH PERFORMANSI
Elektri~ni pogoni velike snage u valjaoni~kimstanovima, mlinovima, sna`nim pumpama, kompresorima iostalim primenama gde instalisana snaga prevazilazinekoliko desetina kilovata predstavljaju primene u kojimaservo performanse i brz odziv momenta nisu potrebni, ali serasprezanjem regulacionih kontura momenta i fluksa moguposti}i u{tede elektri~ne energije, umanjenje udara ioscilacija momenta, mirniji rad i olak{an nadzor stanjimamotora i procesa. Vrednost pogona vi{estruko prema{ujecenu upravlja~ke i merne opreme potrebne za izvr{avanjealgoritama vektorskog upravljanja, pa se ono primenjuje~esto i primenjuje. Kvalitet pogona sa asinhronim motorimasnage 500 kW u industriji ~elika [144] se primenom FOCvidno pobolj{ava uz istovremeno uve}anje pouzdanosti(MTBF).
Realizacija vektorskog upravljanja zahteva robusnuestimaciju amplitude i polo`aja fluksa [137]. Pogoni velikesnage retko zahtevaju rad u oblasti malih brzina, pa senaj~e{}e primenjuje direktno vektorsko upravljanje (DFOC)[138] koje ne zahteva ugradnju dava~a na osovinu motora.Osetljivost indirektnog IFOC algoritma na varijacijeparametera TR naro~ito je izra`ena kod pogona velike snage,gde implementacija ovog algoritma zahteva poznavanjeoblika i modelovanje efekata dubokih `lebova [126]. DFOCalgoritam informacije o fluksu izdvaja iz terminalnihveli~ina i statorskih jedna~ina naponskog balansa.Algoritam zahteva poznavanje statorskog otpora Rs. Premdavarijacije ovog parametra negativno uti~u na karakteristikepogona i ugro`avaju rad u oblasti malih brzina, njegovepromene u pogonima velike snage sa DFOC upravljanjemnemaju dramati~ne posledice. Relativna vrednost statorskogotpora asinhronih motora velike snage je veoma mala(rs<0.002) pa su i efekti promene ovog parametra od maloguticaja na rad pogona.

Direktno vektorsku upravljanje omogu}uje da sepromena momenta kod pogona velike snage optimizira takoda se umanje udari, naprezanja i tro{enje delovamehani~kog podsistema i tako uve}a srednje o~ekivanovreme izme|u dva sukcesivna kvara (MTBF). Momentproizvod iQ komponente struje i fluksa, pa se jedna te istazadata vrednost mo`e posti}i pri razli~itim vredostimafluksa [151,152]. Prisutni stepen slobode omogu}uje da seamplituda fluksa podesi tako da gubici snage, koji se imajupri odre|enom radnom re`imu, budu najmanji mogu}i [45,143,145]. Na ovaj na~in se gubici u pogonu i pretvara~umogu bitno umanjiti u svim radnim re`imima, a naro~ito uoblasti slabljenja polja [47]. Gubici snage su kodnesinusoidalnog (PWM) napajanja uve}ani. Valovitost iizobli~enja statorske struje i talasnog oblika fluksaprouzrokuju dodatne gubitke u bakru i limovima [132], paje te{ko unapred predvideti optimalni nivo fluksa za zadatooptere}enje pogona. Pored toga, zasi}enje magnetnog kolakao i zavisnost gubitaka od temperature [46] onemogu}ujuda se optimalni radni re`im unapred zada. Mo`e se,me|utim, dokazati [92] da je zavisnost gubitaka snage odamplitude fluksa konkavna funkcija sa strogo pozitivnimdrugim izvodom, {to omogu}uje efektnu primenugradijentnih on-line pristupa minimizaciji gubitaka.Kirschen [146] predla`e minimizaciju gubitaka u pogonupomo}u alrotitma koji vr{i promene magnetizacione struje urelativno malim koracima. Veli~ina i smer varijacija ∆id
zavise od procene gubitaka, pri ~emu se rotorski fluks napromene magnetizacione struje odaziva sa ka{njenjemodre|enim rotorskom vremenskom konstantom. Ovakavalgoritam }e amplitudu fluksa rastere}enog pogona umanjitina minimalnu vrednost. Ako optere}enje u ovakvom stanjunaglo poraste, nizak nivo fluksa i kona~an strujni kapacitetpogonskog konvertora ograni~i}e raspolo`ivi moment.Struju magnetizacije je tada mogu}e postaviti na vrednostjednaku ili ve}u od nominalne, ali }e se fluks uve}avatirelativno sporo, pa su neizbe`ni propadi - velika negativnaodstupanja brzine od zadate vrednosti. Veli~ina propadabrzine se u pomenutom slu~aju mo`e umanjitioptimizacijom dinami~ke raspodele struje namagnetizacionu (id) i aktivnu (iq) komponentu [92].
Kod elektri~nih pogona sa asinhronim motorom iunapred poznatim periodi~nim promenama zadate vrednostibrzine mogu}e je predvideti promenu elektromagnetnogmomenta u toku ciklusa. Amplituda rotorskog fluksa semo`e (u odre|enim granicama) slobodno birati i menjati utoku ciklusa. Izborom amplitude fluksa uslovljena je aktivnakomponenta struje: iq = Mem/ΨR. Promena (trajektorija)fluksa u toku radnog ciklusa ma{ine [148 147] se mo`eodrediti tako da gubici snage u motoru i konvertoru budu, zazadati ciklus, najmanji mogu}i.
Primena direktnog vektorskog upravljanja upogonima velikih snaga ne omogu}uje pouzdan rad priveoma malim brzinama (manjim od 1-2 % nazivne).Ukoliko se ovakav rad ipak zahteva, neophodno je primenitialgoritme za kompenzaciju mrtvog vremena u konvertorusnage, on-line estimaciju statorskog otpora, ili modifikovatistrukturu DFOC kontrolera radi postizanja robusnosti uoblasti malih brzina. Ragnar [142] predla`e efektnumodifikaciju DFOC algoritma (NFO – Natural FieldOrientation) koji brzinu referentnog d-q koordinatnogsistema odre|uje na osnovu procenjene elektromotorne sile.NFO algoritam omogu}uje upravljanje momentomasinhronog motora bez senzora na osovini ~ak i pri brzini
obrtanja jednakoj nuli. Problem parametarske osetljivostinije re{en jer rad NFO algoritma i dalje zahteva poznavanjeparametara statorskog kola. Chouiter [136] pokazuje daprimena H∝ optimizacije kod vektorskog upravljanja uzelemente geneti~kih algoritama u pojedinim re`imima bitnouve}ava robusnost u oblasti malih brzina obrtanja. Marvali[133] analizira mogu}nost primene adaptivnog upravljanjasa referentnim modelom kod vektorskog upravljanjaasinhronim motorima velikih snaga. Upore|enjem dvarazli~ita pristupa (MRAS zasnovan na proceni rotorskogfluksa i pristup koji se oslanja na odre|ivanjeelektromotorne sile) Marvali uo~ava da nijedno re{enje nezadovoljava zahteve u svim radnim re`imima pogona, ve}je neophodno konkurentno izvr{avanje oba algoritma uzselekciju upravlja~kih varijabli u zavisnosti od radnogre`ima. Ovakav pristup, uz vr{enje unakrsnu adaptaciju,omogu}uje robusnost vektorski upravljanih pogona saasinhronim motorom i u oblasti veoma malih brzina.
Kod pogona visokih performansi ~ija je snagaveoma velika (preko 500 kW) izbegava se upotrebaasinhronih motora zbog relativno velike reaktivne snage. Uoblasti velikih snaga primenu ~esto nalaze sinhroni motorisa namotanim rotorom. Topologije pogonskih konvertoravariraju od tiristorskih strujnih invertora do ciklokonvertora,koji se primenjuju u sporohodnim elektri~nim pogonima naledolomcima i velikim mlinovima. Upravljanje sinhronimmotorima velike snage realizuje se kao vektorskoupravljanje. Upravlja~ka struktura je veoma sli~navektorskom kontroleru momenta i fluksa asinhronogmotora, s tim {to u slu~aju sinhrone ma{ine sa namotanimrotorom funkciju d-komponente statorske struje preuzimapobudna struja rotorskog elektromagneta.
2.7. PROBLEMI POVEZIVANJA ELEKTRI~NIH POGONA I PROCESNIH RA~UNARA
Komunikacija se u proizvodnim pogonima pre 30-40 godina vr{ila tako {to su se ljudi – operatori kretali odjedne proizvodne ma{ine do druge, nadziru}i faze rada ivr{e}i korektivne akcije delovanjem na prekida~e i tastere.Pode{avanja i popravke ure|aja za automatizaciju zahtevalisu uglavnim precizne mehani~are, a u mnogo manjoj merielektrotehni~are. Pozitivne strane tada{njih ure|aja su brzouo~avanje i lako razumevanje svih merno upravlja~kihsklopova. Nedostatak potrebne fleksibilnosti zahtevao je sesatni mehanizmi i releji zamene programabilnimelektronskim sklopovima.
Pojava PLC i SCADA ure|aja i sistema(Programmable Logic Controller, Supervisory Control AndData Acquisition) omogu}uje znatno uve}anje fleksibilnostii pouzdanosti kod upravljanja proizvodnim procesima. PLCje `i~anim vezama spregnut sa ventilima, kontaktorima idava~ima, pri ~emu povezivanje sa svakom pojedina~nomnapravom zahteva najmanje dva zasebna provodnika.

PLC
PLC
POGON #1
POGON #3
POGON #1
POGON #2
POGON #2
POGON #3
@I^ANA VEZA
DIGITALNA VEZA
Slika 2.7.1: Primer povezivanja PLC jedinice sa elektri~nimpogonima pomo}u `i~anih veza i digitalnog komunikacionog
kanala.
U toku modernizacije proizvodnih procesa uvodese frekvencijski regulisani pogoni sa mogu}no{}ukontinualne varijacije brzine obrtanja, izmene smera idinami~kog ko~enja. Pojavljuje se potreba zaparametrizacijom, naprednom signalizacijom i nadzorom.Digitalno upravljani elektri~ni pogoni postajunajkompleksnije naprave u okviru proizvodnog procesa.Kod dava~a i aktuatora se pojavljuju elementi lokalneinteligencije, pa se javlja i potreba za naprednim re{enjimakomunikacije izme|u jedinica i sa centralnim ra~unarom.Upravljanje kretanjem pomo}u digitalno kontrolisanih servopogona i uvo|enje CNC jedinica u proizvodne proceseuve}ava broj razli~itih ure|aja koje treba komunikacionimkanalima povezati u funkcionalnu celinu. U savremenimproizvodnim ma{inama se susre}u industrijski PC ra~unari,VMA-bus merno upravlja~ki moduli, enkoderi, pozicioneri,kontaktori, ventili, roboti, displeji, tastature itd. Vezacentralnog ra~unara, aktuatora i dava~a poprima formumre`e i zahteva veliku brzinu i pouzdanost prenosapodataka. Povezivanje elemenata sistema neophodno jezbog automatizovanog pode{avanja, pu{tanja u rada, izmeneparametara u toku rada itd.
Konvencionalne topologije sistema za upravljanjekretanjem kod alatnih ma{ina i u robotici uklju~uju nekolikoservopoja~ava~kih modula i CNC ure|aj za upravljanje ikoordinaciju. Regulacija brzine i momenta ostvatena je uokviru servopoja~ava~a, dok se generisanje trajektorija iregulacija polo`aja vr{i u okviru CNC-a. Komunikaciju
CNC-servopoja~ava~ uklju~uje cikli~nu razmenu zadatihvrednosti brzine, podataka o polo`aju osovine motora,komande i informacije o statusu (kvarovima).
U okviru postoje}ih re{enja CNC saop{tava zadatuvrednost brzine u obliku standardnog +/- 10V analognogsignala, ~ija maksimalna vrednost (10V) odgovara najve}ojradnoj brzini servo motora. A/D konvertor rezolucije 12-14b u okviru servopoja~ava~kog modula pretvara zadatuvrednost u digitalnu re~, pogodnu za dalju obradu upogonskom kontroleru. Podatak o polo`aju osovineneohodno je saop{titi CNC ure|aju radi uspostavljanjapovratne sprege i odre|ivanja gre{ke pra}enja. Povratnasprega po polo`aju se mo`e uspostaviti ugradnjom dodatnogenkodera u svaku osu, ali se ~esto obezbe|uje i tako {toservopoja~ava~ generi{e povorku impulsa RS485 formata –‘simulirani enkoder’ [4],[88]. CNC emituje komande iprihvata izve{taj servopoja~ava~a o njihovom statusu uobliku standardizovanih logi~kih signala naponskog nivoa24V.
Postoje}a komunikacija zahteva veliki brojprovodnika koji povezuju module i CNC, brze A/D i D/Akonvertore, i slo`ene broja~ke sisteme za akumulacijupozicionih inkremenata. Problemi kvantizacije, ofseta, {umai ka{njenja su{tinski ograni~avaju performanse u kontrolikretanja. Kako su pozicioni i brzinski kontroler razdvojeni,performanse zavise i od periode cikli~ne razmeneinformacija. Retki su sistemi sa ciklusima kra}im od 1ms.Kako brzine kretanja alata dosti`u 2m/s, i kod najkra}ihciklusa ka{njenje u prenosu zadate vrednosti brzine mo`erezultovati gre{kom pra}enja od 2mm. Da bi se gre{keumanjile, upravlja~ki program servopoja~ava~a seoboga}uje modulima za unutra{nju interpolaciju i predikcijuzadate vrednosti, dok CNC paralelno sa zadatom brzinom~esto emituje i signale feed-forward kompenzacije.
Napredne strukture upravlja~a kretanjempodrazumevaju da se u okviru servopoja~ava~a obavefunkcije kontrole momenta, brzine, polo`aja i fine(unutra{nje) interpolacije zadate vrednosti polo`aja, dok seu CNC-u obavlja generisanje trajektorije, koordinacijakretanja vi{e osa kao i sve ostale funkcije velike slo`enosti imalog prioriteta. Primena ovog naprednog koncepta zahtevadigitalnu komunikaciju izme|u modula i CNC-a. Cikli~narazmena podataka mo`e uklju~ivati zadatu vrednostpolo`aja (4 bajta), povratnu spregu po polo`aju (4 bajta),kontrolne informacije i komande (2 bajta), informacije ostatusu(2 bajta), elemente dijagnostike (2 bajta) i 2-4 bajtanamenjena parametrizaciji.

Slika 2.7.2: ^etvoroosni servo sistem sa digitalnom komunikacijom izme|u ra~unara i servo poja~ava~a: jedinstvenesabirnice umanjuju broj veza.
Digitalna komunikacija CNC-moduliservopoja~ava~a zahteva otvorenu arhitekturu istandardizovane postupke razmene informacija. Potrebno jeposti}i da CNC i servo-moduli razli~itih proizvo|a~a budume|u sobom kompatibilni, kako bi se komunikacija moglaostvariti bez dodatnih zahvata. Standardizacija treba daobezbedi mogu}nost da instalaciju modula, integracijusistema i eventualnu zamenu u toku rada mogu obavitiradnici koji nisu naro~ito obu~avani (proizvodnja uzemljama tre}eg sveta). Ne manje va`na je i mogu}nost dase elementi sistema dobavljaju od razli~itih proizvo|a~a. Oddigitalnog komunikacionog sistema se o~ekuje da obezbedijednostavan servis, dijagnostiku i odr`avanje. Poruke ipostupci trebaju da budu hijerarhijski organizovani pokompleksnosti i prioritetu, potrebno je odvojiti razmenu
kompleksnih informacija male hitnosti od prenosajednostavnih, kratkih poruka velikog prioriteta. Postupcitrebaju da budu unificirani za sve vrste ure|aja (aktuatore,senzore, CNC) i sve vrste rpoizvodnih ma{ina, kako bi sepostigla {to ve}a me|usobna zamenjivost modula isklopova. Robusna i na {um otporna komunikacija treba daobezbedi redundantnost, sposobnost oporavka i nastavkarada nakon gre{ke i prihvatljive tro{kove instalacije ieksploatacije.
Potrebna brzina prenosa informacija kroz kanal zadigitalnu komunikaciju izme|u ure|aja industrijskeautomatizacije mo`e se proceniti na osnovu analize stanjakoje postoji u konvencionalnim re{enjima sa analognim (+/-10V) i logi~kom (0-24V) prenosom podataka.

Slika 2.7.3: Konvencionalni na~in povezivanja servopoja~ava~a sa centralnim ra~unarom.
Slika 2.7.4: Komunikacioni zahtevi kod vi{eosnih pogona.
Potrebno je povezati od 10 do 100 komunikacionih~vorova koji su naj~e{}e locirani na rastojanjima manjim od100m. Neohodno je obezbediti ciklus razmene informacija ivremena odziva ispod 1 ms. Ako se 14-bitna A/D konverzijaanalognih (+/-10V) referentnih vrednosti obavlja svakemilisekunde, tada je mo`emo ekvivalentirati prenosompribli`no 1.7-2 kBytes/s, pa se izra~unavanjem dolazi dozaklju~ka da zbirna brzina prenosa mora biti bolja od1Mbaud. Tehnologija potrebna za realizaciju digitalnekomunikacije pomenutih brzina ve} godinama postoji, alijo{ uvek ne postoji op{te usvojeni standard ve} svakiproizvo|a~ CNC ure|aja i servopoja~ava~kih modulaposeduje specifi~an hardver i protokol.
U najve}em broju slu~ajeva komunikacija izme|uure|aja industrijske automatizacije obavlja se serijski.Veliki broj provodnika isklju~uje mogu}nost paralelnogpovezivanja komunikacionih ~vorova. Konvencionalneserijske veze (RS232, RS485, RS422) ne nalaze primenuzbog i) nedostatka galvanske izolovanosti i male otpornostina {um, ii) problema u povezivanju vi{e komunikacionih~vorova paralelno na istu liniju, iii) neusagla{enihprotokola za razmenu informacije, i iv) nedovoljne brzineprenosa.
Digitalna razmena informacija izme|u elemenatara~unarskih sistema omogu}uje postizanje velikih brzinaprenosa. VME (Versa Module Eurocard) i AT-Busograni~eni su na veoma mala rastojanja i ne mogu sekoristiti za povezivanje prostorno odvojenih modula.Jednostavnost i niska cena Ethernet i Cheapernet veza(povezivanje u~esnika BNC kablom) kao i relativno velikebrzine prenosa ~ine ih atraktivnim za primene u industriji.Na sada{njem nivou njihovi protokoli ne omogu}ujugarantovano vreme odziva, pa se ne mogu upotrebiti zaupravljanje u realnom vremenu.
Poku{aj standardizacije u polju industrijskihkomunikacija na~inila je komisija na evropskom nivou –IEC65/SP50. IEC protokol je definisan kao serijska vezavi{e komunikacionih ~vorova. Prenos se obavlja opti~kim
kablom ili paricama koje prenose signala RS485 formata.Predvi|ena je automatska (hardverska) korekcija gre{aka uprenosu, o~ekivano vreme odziva je 1 ms, brzina prenosa do1 Mbit/s uz opti~ki prenos na daljine do 1.2 km. IECprotokol je koncipiran tako da omogu}uje prenos zadatihvrednosti, signala povratne sprege, komandi, statusa, kao ida omogu}uje vr{enje funkcija nadzora i za{tite. Predvi|a jei preno{enje programa (koda) perifernim modulima odstrane centralnog, kao i upisivanje (download) primljenogprograma u radnu memoriju digitalnog kontroleraperifernog modula i njegovo izvr{avanje. Relativnoskromne performanse IEC protokola predupredile sunjegovu {iru primenu, tako da danas postoji i koristi se ~itavniz razli~itih, me|usobno nekompatibilnih protokola(Servos, Profibus DP, Canbus, InterbusS, Sinec L2 DP,MACRO itd.).
Standardizacija pretpostavlja uskla|ivanjekarakteristika protokola u sedam nivoa: i) na~in mehani~kogi elektri~nog povezivanja komunikacionih ~vorova; ii)hardversko re{enje prenosa elementarnih poruka; iii) nivopovezivanja u mre`u, usmeravanje, segmentacija i re-asembliranje blokova podataka; iv) upravljanje prenosompodataka iz jednog ~vora u drugi (zahtev, prihvatanje,potvrda); v) nivo sesije – organizacija i sinhronizacijaprenosa blokova podatakaizme|u ~vorova; vi) sintaksa,komande connect, disconnect, i programski moduli zapovezivanje komunikacije za korisni~kom aplikacijim i vii)nivo korisni~kih aplikacija. ^ak i za protokole koji sesmatraju relativno dobro definisanim postignuto jeuskla|ivanje uglavnom na nivou 1, 2 i 7, pa je me|usobnazamenjivost CNC ure|aja, servo modula i drugih ure|ajaindustrijske automatizacije jo{ uvek neostvariva. Korisnicisu i dalje upu}eni da celokupan sistem dobavljaju od jednogproizvo|a~a, {to znatno ote`ava odr`avanje, umanjujefleksibilnost sistema a proizvo|a~e stavlja u monopolskipolo`aj.
Primer relativno uspe{nog nacionalnog standardadigitalne industrijske komunikacije je Sercos (Serial Realtime Communication System) koji je koncipiran od strane

VDW udru`enja nema~kih proizvodja~a alatnih ma{ina inamenjen pre svega povezivanju CNC-a sa digitalnoupravljanim elektri~nim servo pogonima. Prenos se obavljapomo}u plasti~nog opti~kog kabla. Koriste se talasne du`ineod 640 do 675 nm i emisione snage od 20 do 90 µW, ~imese obezbe|uju brzine prenosa do 2 Mbaud-a. Sprega(konektori) se realizuje prema IEC 874-2 standardu. Sercosje koncipiran kao prsten, kako bi se izbegli T-spojeviopti~kih kablova i disperzija svatlosti na ovakvimspojevima. Vi{e Sercos prstenova mo`e biti zvezdastopovezano, ~ime se integri{u svi procesi u okviru jednefabrike. Svaki komunikacioni ~vor u prstenu posedujeprijemnik i predajnik. Prijemnik sadr`i naro~ito GAL kolo~iji je zadatak da iz ulaznog signala izdvoji sinhronizacioneimpulse (clock). Predajnik mo`e re-emitovati poruku koju jeprimio ili emitovati svoju sopstvenu poruku.
Sercos je baziran na master-slave pristupu. Cikluskomunikacije je nepromenljiv. Prenos zapo~injesinhronizacionim telegramom master-a, potom sledi prenospodataka iz adresiranih slave-~vorova, a zatim prenosporuka master-~vora preostalim ~vorovima. Trajanje ciklusase ne menja u toku komunikacija. Mogu}e je odabraticikluse trajanja od 64µs do 65 ms. U okviru telegramaprenose se zadate vrednosti brzine i polo`aja, signalipovratne sprege, parametri, izvr{ni kod procedura, statusneporuke i signali gre{ke. Svaki blok podataka posedujekarakteristi~an broj (ID). Sercos predvi|a ukupno 2^16razli~itih ID brojeva.
Premda Sercos obezbe|uje izuzetno pouzdan i brzprenos i jednostavnu instalaciju, odsustvo njegove {ireprimene prouzrokovano je relativno visokom cenom kao inastojanjem VDW grupe da razvijenu tehnologiju zadr`e uokviru Nema~ke. Situacija se unekoliko promenila pojavomSercon 410A integrisanog kola koje implementira Sercosprotokol. Kolo poseduje sve potrebne mehanizme zarealizaciju protokola, dual-port ram veli~ine 1024x16 iDMA mehanizam i neohodne broja~ke sisteme, ~ime seznatno olak{ava njegovo povezivanje sa digitalnimpogonskim kontrolerom i Sercos prstenom. Sercon 410A jerazvijen od strane IAM Group – Braunschweig, dok gaproizvodi SGS koji je lociran u Italiji. Eventualno usvajanjeSercos komunikacije }e biti uslovljeno otklanjanjempostoje}ih nedostataka, a pre svega umanjenjem tro{kovanjegove ugradnje i instalacije.
Znatno ekonomi~niji od Sercos interfejsa jeInterbus-S, ~ija je brzina prenosa manja (500 kBits/s) ali muje efikasnost znatno ve}a. Interbus-S je naro~ito pogodan zapovezivanje senzora i aktuatora. Umesto telegrama irazli~itih poruka, prenos podataka se obavlja na upro{}enna~in, “all in one message”. Ne postoje uvodni iprotokolarni delovi kao {to je broj poruke (ID), adresa,komandno polje i sli~no, pa se ostvaruju znatne u{tede uvremenu. Efikasnost (odnos ‘korisnih’ podataka i ukupnoprenetih) dosti`e 60%, dok se kod ostalih protokola onakre}e u opsegu od 4 do 25%. Kao i Sercos, Interbus-S jeprstenaste strukture sa master-slave organizacijom. Master~vor poseduje mogu}nost za sprezanje sa nadre|enimra~unarom ili nadre|enom mre`om. Mogu}e je povezati do
64 komunikaciona ~vora na rastojanjima do 400m. Podacise prenose signalima RS485 formata, brzinom do 0.5Mbits/s. Pored Sercos i Interbus-S interfejsa, vredi pomenutiEasyBus, razvijen od strane [vajcarskog proizvo|a~aSocapel, koji obezbe|uje povezivanje do 254komunikaciona ~vora i poseduje brzinu prenosa od 2.5Mbit/s. U fazi razvoja je MACRO, intefejs za komunikacijuizme|u CNC-a i servopoja~ava~a u vi{eosnim sistemima saveoma velikim brojem servo motora. Razvoj ovog intefejsaorganizuju veliki svetski proizvo|a~i opreme za upravljanjekretanjem (US-Delta Tau Systems, Baldor-Electric,Kollmorgen Motion Technologies, Western Servo Design).MACRO }e biti konfigurisan kao prsten i obezbedi}e brzinuprenosa od 100 Mbits/s.
Digitalna veza izme|u centralnog ra~unara, motorai senzora sve vi{e poprima strukturu mre`e. Teknic Inc.[261] predla`e primenu TR protokola za povezivanjeservopoja~ava~a sa CNC i PLC ure|ajuma, sli~nogpostupcima komunikacije u ra~unarskoj mre`i. Poruke ikomande omogu}uju automatizovano odre|ivanje vrstemotora i senzora, merenje relativnog polo`aja senzora uodnosu na motor (autophasing), digitalnu kompenzacijuofseta strujne petlje, odre|ivanje strukture i parametaraservo regulatora kao i identifikaciju mehani~kogpodsistema (Huy, [183]). Brza izmena podataka omogu}ujeda se realizuje PC-scope funkcija: prikazivanje vremenskepromene stanja pogona na ekranu industrijskog PCra~unara, koji se koristi u fazi instalacije pogona. Ovafunkcionalnost olak{ava pode{avanje odziva strujne i servokonture regulacije i pru`a korisniku direktan uvid upona{anje sistema u realnom vremenu. Dalji razvoj TRprotokola predvi|a povezivanje pogona i CNC ra~unara naInternet mre`u, ~ime bi se olak{alo servisiranje i naknadnopode{avanje udaljenih jedinica i izbegla potreba da stru~noosoblje putuje do udaljenih lokacija.
Za potrebe uno{enja parametara, strukturepogonskog regulatora, zadatih vrednosti i trajektorijapredvi|a se izrada korisni~kih programa kao {to je GAD(Graphical Application Designer) i GMSD (GraphicalMotion Software Development), koji omogu}uju da osobljeniske kvalifikacije obavlja programiranje u slobodnoj formii defini{e funkciju, strukturu i parametre pogona putemuno{enja i povezivanja ikona. Modularno organizovanupravlja~ki program unutar digitalnog pogonskog kontrolerau sklopu sa PC korisni~kim programom omogu}uje da sepogon konfiguri{e za rad sa asinhronim, sinhronim,reluktantnim ili DC motorom, selekciju vrste i tipaosovinskog dava~a, kao i izbor algoritama upravljanja naskali od U/f regulacije do UFOC strukture sa digitalnimregulatorom struje. TR protokol predvi|a podr{ku ne-standardnih na~ina komunikacije na bazi kartica zapro{irenje i dodatnih programskih modula. U slu~ajevimakada slo`enost upravlja~kog zadatka prevazilazi mogu}nostidigitalnog kontrolera koji se u pogon standardno (serijski)ugra|uje, TR pristup predvi|a ugradnju modula zapro{irenje baziranog na 32-b RISC mikrokontroleru iprimenu naro~itog Motion Control Basic programskogjezika pogodnog za opis zadataka i algoritama upravljanjakretanjem.
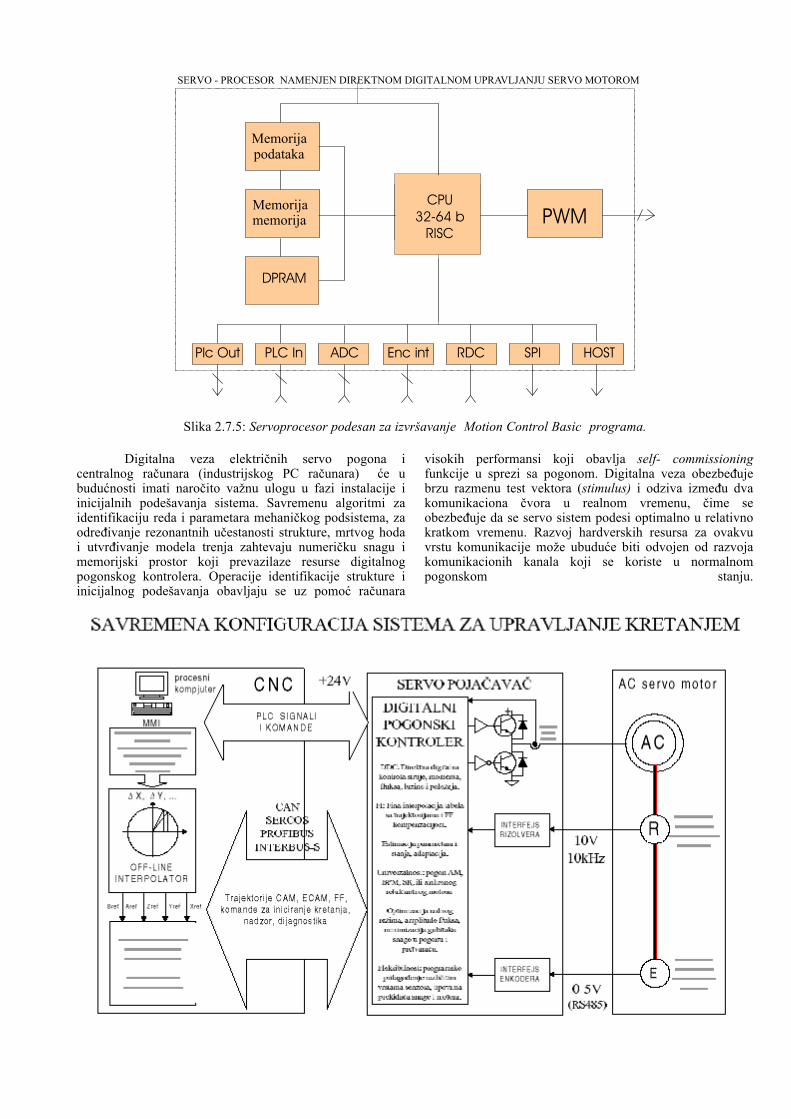
ProgramRam
DataRam
Dual PortRam
PWMChannels
Output PLC In ADC Enc int RDC P/D PWM
Memorijapodataka
Memorijamemorija
DPRAM
CPU32-64 b
RISCPWM
Plc Out PLC In ADC Enc int RDC SPI HOST
SERVO - PROCESOR NAMENJEN DIREKTNOM DIGITALNOM UPRAVLJANJU SERVO MOTOROM
Slika 2.7.5: Servoprocesor podesan za izvr{avanje ‘Motion Control Basic’ programa.
Digitalna veza elektri~nih servo pogona icentralnog ra~unara (industrijskog PC ra~unara) }e ubudu}nosti imati naro~ito va`nu ulogu u fazi instalacije iinicijalnih pode{avanja sistema. Savremenu algoritmi zaidentifikaciju reda i parametara mehani~kog podsistema, zaodre|ivanje rezonantnih u~estanosti strukture, mrtvog hodai utvr|ivanje modela trenja zahtevaju numeri~ku snagu imemorijski prostor koji prevazilaze resurse digitalnogpogonskog kontrolera. Operacije identifikacije strukture iinicijalnog pode{avanja obavljaju se uz pomo} ra~unara
visokih performansi koji obavlja self- commissioningfunkcije u sprezi sa pogonom. Digitalna veza obezbe|ujebrzu razmenu test vektora (stimulus) i odziva izme|u dvakomunikaciona ~vora u realnom vremenu, ~ime seobezbe|uje da se servo sistem podesi optimalno u relativnokratkom vremenu. Razvoj hardverskih resursa za ovakvuvrstu komunikacije mo`e ubudu}e biti odvojen od razvojakomunikacionih kanala koji se koriste u normalnompogonskom stanju.

Slika 2.7.6: Decentralizovan sistem za upravljanje kretanjem: Razmena podataka izme|u servopoja~ava~a i centralnogra~unara ostvaruje se digitalnim komunikacionim kanalom. Sve funkcije upravljanja i vremenski kriti~ni zadaci izvr{avaju
se u okviru servoprocesora konkretnog pogona, dok centralni ra~unar vr{i nadzor i sinhronizaciju vi{eosnog sistema.
2.8. DIGITALNI KONTROLERI NAMENJENIUPRAVLJANJU ELEKTRI~NIM POGONIMA
Protekla dekada obele`ena je razvojem digitalnihsignalnih procesora i mikrokontrolera namenjenih re{avanjuslo`enih problema upravljanja, prikupljanja, i obradesignala. Digitalni procesori ~iji MOS tranzistori imaju kanaldu`ine L<300 nm sposobni za rad na u~estanostima preko200 MHz i obavljanje 1.6 x 109 operacija u sekundi [23].Digitalna tehnika i digitalna realizacija danas vi{estrukoprevazilazi oblast ra~unara. Merni instrumenti, audio ikomunikacioni ure|aji, sigurnosni sistemi, sistemi zaupravljanje, nadzor i signalizaciju pa ~ak i pojediniku}anski aparati poseduju mikrokontroler ili signalniprocesor koji kroz hardverske i programske resurse emulirafunkcije koje su ranije tradicionalno ostvarivane analognimelektronskim kolima. Numeri~ki zahtevni algoritmiupravljanja elektri~nim pogonima, kao {to su algoritmivektorskog upravljanja i pristupi estimaciji bazirani naanalizi spektra zahtevaju primenu procesora visokihperformansi u okviru digitalno upravljanih pogona [22].
Kori{}enjem digitalnog pogonskog kontroleramogu se ostvariti i funkcije koje nije mogu}eimplementirati upotrebom kola analogne elektronike.Digitalnom implementacijom obrtnih transformacija uokviru vektorskog kontrolera omogu}eno je raspregnutoupravljanje momentom i fluksom ma{ina za naizmeni~nustruju kao i dostizanje dinami~kog odziva koji po kvalitetuprevazilazi odziv elektromotornih pogona sa motorimajednosmerne struje. Razvoj digitalnih signalnih procesora itrend integracije periferijskih ure|aja i procesoraobezbe|uje objedinjavanje funkcija regulacije momenta,brzine i pozicije u jedinstvenom kontroleru [153], ~ime seprevazilaze problemi {uma i smetnji tipi~ni za distribuiranestrukture sa odvojenim CNC, PLC jedinicama i zasebnimservo poja~ava~ima. Integracija mernih i upravlja~kihfunkcija uz stalno uve}anje brzine izra~unavanja inicirala je
nastanak novih pristupa u re{avanju problema upravljanjaelektromotornim pogonima i konvertorima snage [154]. Uovom poglavlju izlo`eno je stanje savremenih digitalnihpogonskih kontrolera, problemi digitalne implementacijezakona upravljanja, kao i trendovi daljeg razvoja.
Kompaktna realizacija digitalnog pogonskogkontrolera zahteva da periferijski ure|aju potrebni zaobavljanje funkcija merenja i upravljanja u pogonu buduintegrisani sa digitalnim mikrora~unarom ~iji memorijskiprostor i sposobnost izra~unavanja omogu}ujuimplementaciju relevantnih algoritama upravljanja. Zahtevise mogu svrstati u pet grupa:
i) Analogno-digitalni interfejs: Potrebno jeraspolagati A/D konvertorom sa ~iji multiplekser treba daima 6-8 ulaza opremljenih zasebnim S/H kolima imogu}no{}u za jednovremeno uzimanje odbiraka ulaznihsignala. Potrebna je rezolucije 12+1 b i brzina rada od 200kS/s. D/A konvertori kod DDC sistema nisu neophodni imogu se koristiti za nadzor.
ii) Broja~ki sistem: (HSO/HSI – high speed inputand output, EPA – event processor array, CC – capturecompare) Implementacija digitalnog {irinskog (PWM)modulatora zahteva programabilni broja~ki sistem kojigeneri{e 3-6 povorki impulsa varijabilne {irine, u~estanosti irelativnog polo`aja. Rezolucija broja~kog sistema treba dabude bolja od 100 ns. Merenje polo`aja i brzine na osnovusignala sa inkrementalnog enkodera zahteva zbrajanjeenkoderskih impulsa i merenje njihove {irine, pa se odfleksibilnog broja~kog sistema tra`i da omogu}i prihvatanjei obradu impulsnih signala na 4-6 ulaza. Pored pomenutihzadataka, broja~ki sistem treba da bude sposoban da inicira isamostalno (bez u~e{}a procesora) obavi transakcije kao {toje iniciranje A/D konverzije, pohranjivanje rezultatakonverzije u unutra{nju memoriju, prihvatanje i odaslanjeporuka serijskom vezom, DMA, neke ulazno/izlaznefunkcije i itd.
Slika 2.8.1: Funkcije digitalnog pogonskog kontrolera.
iii) Centralna jedinica digitalnog mikrokontroleratreba da omogu}i obavljanje operacija sa 32-bitnimbrojevima brzinom od 20-40 e6 instrukcija u sekundi.Unutra{nja memorija treba da poseduje oko 32-64 hiljade16-b lokacija za sme{taj programa i od 5 do 10 hiljada 16-blokacija za sme{taj podataka.
iv) Digitalni mikrokontroler treba da posedujeserijski komunikacioni kanal za povezivanje sa drugimra~unarima i ure|ajima, sposoban za dostizanje brzineprenosa ve}e od 1 Mbit/s.
v) Tehnologija izrade i ku}i{te mikrokontroleratreba da obezbedi njegov pouzdan rad u uslovima jakih
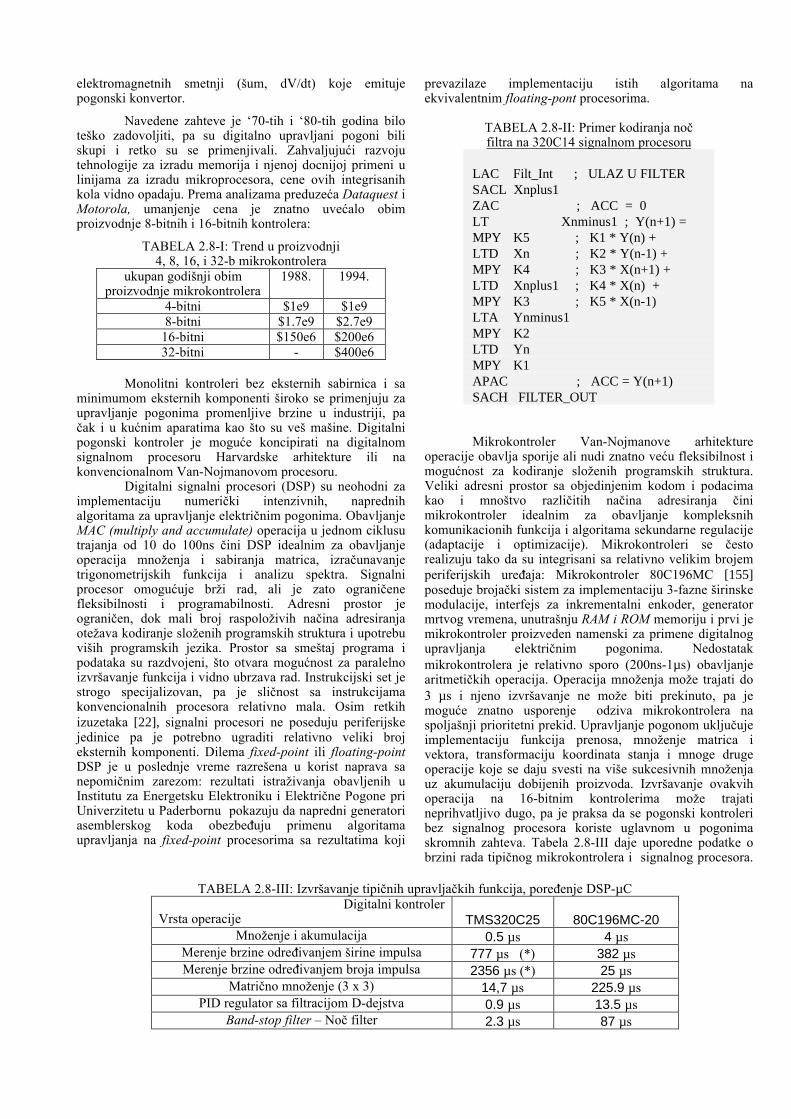
elektromagnetnih smetnji ({um, dV/dt) koje emitujepogonski konvertor.
Navedene zahteve je ‘70-tih i ‘80-tih godina bilote{ko zadovoljiti, pa su digitalno upravljani pogoni biliskupi i retko su se primenjivali. Zahvaljuju}i razvojutehnologije za izradu memorija i njenoj docnijoj primeni ulinijama za izradu mikroprocesora, cene ovih integrisanihkola vidno opadaju. Prema analizama preduze}a Dataquest iMotorola, umanjenje cena je znatno uve}alo obimproizvodnje 8-bitnih i 16-bitnih kontrolera:
TABELA 2.8-I: Trend u proizvodnji4, 8, 16, i 32-b mikrokontrolera
ukupan godi{nji obimproizvodnje mikrokontrolera
1988. 1994.
4-bitni $1e9 $1e98-bitni $1.7e9 $2.7e9
16-bitni $150e6 $200e632-bitni - $400e6
Monolitni kontroleri bez eksternih sabirnica i saminimumom eksternih komponenti {iroko se primenjuju zaupravljanje pogonima promenljive brzine u industriji, pa~ak i u ku}nim aparatima kao {to su ve{ ma{ine. Digitalnipogonski kontroler je mogu}e koncipirati na digitalnomsignalnom procesoru Harvardske arhitekture ili nakonvencionalnom Van-Nojmanovom procesoru.
Digitalni signalni procesori (DSP) su neohodni zaimplementaciju numeri~ki intenzivnih, naprednihalgoritama za upravljanje elektri~nim pogonima. ObavljanjeMAC (multiply and accumulate) operacija u jednom ciklusutrajanja od 10 do 100ns ~ini DSP idealnim za obavljanjeoperacija mno`enja i sabiranja matrica, izra~unavanjetrigonometrijskih funkcija i analizu spektra. Signalniprocesor omogu}uje br`i rad, ali je zato ograni~enefleksibilnosti i programabilnosti. Adresni prostor jeograni~en, dok mali broj raspolo`ivih na~ina adresiranjaote`ava kodiranje slo`enih programskih struktura i upotrebuvi{ih programskih jezika. Prostor sa sme{taj programa ipodataka su razdvojeni, {to otvara mogu}nost za paralelnoizvr{avanje funkcija i vidno ubrzava rad. Instrukcijski set jestrogo specijalizovan, pa je sli~nost sa instrukcijamakonvencionalnih procesora relativno mala. Osim retkihizuzetaka [22], signalni procesori ne poseduju periferijskejedinice pa je potrebno ugraditi relativno veliki brojeksternih komponenti. Dilema fixed-point ili floating-pointDSP je u poslednje vreme razre{ena u korist naprava sanepomi~nim zarezom: rezultati istra`ivanja obavljenih uInstitutu za Energetsku Elektroniku i Elektri~ne Pogone priUniverzitetu u Paderbornu pokazuju da napredni generatoriasemblerskog koda obezbe|uju primenu algoritamaupravljanja na fixed-point procesorima sa rezultatima koji
prevazilaze implementaciju istih algoritama naekvivalentnim floating-pont procesorima.
TABELA 2.8-II: Primer kodiranja no~filtra na 320C14 signalnom procesoru
Mikrokontroler Van-Nojmanove arhitektureoperacije obavlja sporije ali nudi znatno ve}u fleksibilnost imogu}nost za kodiranje slo`enih programskih struktura.Veliki adresni prostor sa objedinjenim kodom i podacimakao i mno{tvo razli~itih na~ina adresiranja ~inimikrokontroler idealnim za obavljanje kompleksnihkomunikacionih funkcija i algoritama sekundarne regulacije(adaptacije i optimizacije). Mikrokontroleri se ~estorealizuju tako da su integrisani sa relativno velikim brojemperiferijskih ure|aja: Mikrokontroler 80C196MC [155]poseduje broja~ki sistem za implementaciju 3-fazne {irinskemodulacije, interfejs za inkrementalni enkoder, generatormrtvog vremena, unutra{nju RAM i ROM memoriju i prvi jemikrokontroler proizveden namenski za primene digitalnogupravljanja elektri~nim pogonima. Nedostatakmikrokontrolera je relativno sporo (200ns-1µs) obavljanjearitmeti~kih operacija. Operacija mno`enja mo`e trajati do3 µs i njeno izvr{avanje ne mo`e biti prekinuto, pa jemogu}e znatno usporenje odziva mikrokontrolera naspolja{nji prioritetni prekid. Upravljanje pogonom uklju~ujeimplementaciju funkcija prenosa, mno`enje matrica ivektora, transformaciju koordinata stanja i mnoge drugeoperacije koje se daju svesti na vi{e sukcesivnih mno`enjauz akumulaciju dobijenih proizvoda. Izvr{avanje ovakvihoperacija na 16-bitnim kontrolerima mo`e trajatineprihvatljivo dugo, pa je praksa da se pogonski kontroleribez signalnog procesora koriste uglavnom u pogonimaskromnih zahteva. Tabela 2.8-III daje uporedne podatke obrzini rada tipi~nog mikrokontrolera i signalnog procesora.
TABELA 2.8-III: Izvr{avanje tipi~nih upravlja~kih funkcija, pore|enje DSP-µCDigitalni kontroler
Vrsta operacije TMS320C25 80C196MC-20Mno`enje i akumulacija 0.5 µs 4 µs
Merenje brzine odre|ivanjem {irine impulsa 777 µs (*) 382 µsMerenje brzine odre|ivanjem broja impulsa 2356 µs (*) 25 µs
Matri~no mno`enje (3 x 3) 14,7 µs 225.9 µsPID regulator sa filtracijom D-dejstva 0.9 µs 13.5 µs
Band-stop filter – No~ filter 2.3 µs 87 µs
LAC Filt_Int ; ULAZ U FILTER SACL Xnplus1 ZAC ; ACC = 0 LT Xnminus1 ; Y(n+1) = MPY K5 ; K1 * Y(n) + LTD Xn ; K2 * Y(n-1) + MPY K4 ; K3 * X(n+1) + LTD Xnplus1 ; K4 * X(n) + MPY K3 ; K5 * X(n-1) LTA Ynminus1 MPY K2 LTD Yn MPY K1 APAC ; ACC = Y(n+1) SACH FILTER_OUT

(*) TMS320C25 ne poseduje periferijske ure|aje za merenje broja i {irine impulsa, podaci seodnose na softversku emulaciju broja~a
Obavljanje naprednih funkcija upravljanjaelektri~nim pogonom zahteva primenu signalnih procesora,dok potreba za izvr{avanjem kompleksnih funkcijakomunikacije tra`i fleksibilnost konvencionalnogmikroprocesora. Iz pomenutih razloga, pogonski kontrolerse ~esto realizuje kao dvo-procesorski (DSP + µC) sistem.Primena dvo-procesorskog pogonskog kontrolera sasignalnim i konvencionalnim procesorom je problemati~nazbog neophodnosti me|uprocesorske komunikacije (dual-port RAM, SSI, SPI) koja poskupljuje pogonski kontroler i~ini ga osetljivim na {um (dV/dt). U cilju prevazila`enjaovih problema, grupa evropskih proizvo|a~a (ABB, Bosch,Danfoss, Indramat, Lenze, Moog, Siemens i SeW) jeinicirala izradu monolitnog ‘VeCon-Chip’ digitalnogpogonskog kontrolera namenjenog implementacijialgoritama vektorske kontrole i vr{enju funkcijakomunikacije u okviru digitalno upravljanih pogona visokihperformansi. VeCon je baziran na integraciji 80C165Siemens-ovog mikrokontrolera sa modifikovanimMotorolinim 56000 digitalnim signalnim procesorom.Instrukcijski set DSP modula je oboga}en instrukcijama zahardversko obavljanje Park-ove transformacije, relacija PIDregulatora i ve}eg broja drugih slo`enih funkcija. VeCon ~ipje zami{ljen kao ‘evropski’ odgovor na izazov japanskihproizvo|a~a digitalnih servo pogona (Yaskawa). Dilema‘mikrokontroler, DSP ili dvoprocesorska struktura’ [156] udobroj meri je razre{ena pojavom naprednih RISCmikrokontrolera ~ija se nmeri~ka snaga pribli`ava snazisignalnih procesora, dok fleksibilnost i otvorena arhitekturaomogu}uju naprednu primenu slo`enih funkcijakomunikacije.
Mogu se uo~iti dva razli~ita pristupa projektovanjusavremenih digitalnih pogonskih kontrolera: i) Integracijadigitalnog procesora sa kolima analogno-digitalnoginterfejsa u monolitnu strukturu; ii) Razdvajanje funkcija na‘analogno’ i ‘digitalno’ kolo pogonskog kontrolera.Postoje}a tehnologija za izradu integrisanih kola omogu}ujeobjedinjavanje digitalnih kola velike brzine i analognih kolavisokih performansi [159],[22]. Problem paralelnogobavljanja analognih i digitalnih funkcija je postojanjeneizbe`ne sprege – parazitnih kapacitivnosti koje {umproizveden komutacijom logi~kih kola digitalnog delainjektuju u analogni deo i naru{avaju njegove karakteristike.Promene digitalnih signala visokih u~estanosti prenose sekroz ~ip na tri na~ina [159]: preko linija veza kojepredstavljaju direktnu kapacitivnu spregu sa analognimdelom kola, preko linija za napajanje ili preko zajedni~kogsupstrata. Prostiranje {uma kroz linije za napajanjeanalognih i digitalnih kola umanjuje se njihovimrazdvajanjem. Ne`eljena sprega koja se uspostavlja krozsupstrat se naj~e{}e spre~ava kori{}enjem zaštitnihdifuzionih prstenova koji se izvode oko svakog dela ~ipakoji je osetljiv na šum. Prenos {uma kroz dubinske slojevesupstrata se mo`e umanjiti izborom tipa supstrata, odnosno
debljine i dopiranosti epitaksijalnog sloja koji se nanosi napodlogu [157,159].
Efikasna metoda za umanjenje niskofrekventnog{uma u svim slojevima supstrata je upotreba operacionogpoja~ava~a za filtraciju {uma. Operacioni poja~ava~ serealizuje unutar ~ipa [158,159]. Oko analognog delaintegrisanog kola se formiraju dva prstena u difuziji koja jeistog tipa kao i supstrat, na spoljašnji prsten se povezujeulaz operacionog poja~ava~a, dok se izlaz povezuje saunutrašnjim prstenom. Kolo reakcije izvedeno u vidutrodimenzionalnih otpornika, kori{}enjem parazitnihotpornosti supstrata, tako da je šum digitalnog dela ~ipa naizlazu poja~ava~a eliminisan, pa ne postoji ni u prstenu kojiokru`uje analogni deo ~ipa. Nedostatak re{enja je to {to onopotiskuje {um samo u okviru propusnog opsega operacionogpoja~ava~a, {to je ~esto nedovoljno.
Pored problema {uma, performanse analognih kolaintegrisanih sa digitalnim procesorom umanjene su imanjom ta~no{}u u izradi otpornika. Tolerancije i vrednostipasivnih elemenata koji se mogu napraviti standardnimtehnološkim procesima su ~esto neprihvatljive za realizacijupreciznih A/D konvertora. U tom slu~aju se digitalni deo~ipa realizuje u standardnoj tehnologiji, a za implementacijuanalognog dela se koriste specijalni tehnološki postupci, štoneminovno pove}ava cenu.
Primer objedinjavanja digitalnog procesora i A/Dkonvertora u jedinstvenom integrisanom kolu dat je na slici2.8.1. Periferijsku jedinicu sa A/D konvertorom imajumikrokontroleri 80C196MC [155], Siemens SAB80C166, imnogi drugi. Pomenuti problemi u integraciji analognih idigitalnih funkcija onemogu}uju da se dostignu efektivnerezolucije A/D konverzije bolje od 10 b. Digitalni signalniprocesor TMS320C240 [22] projektovan je namenski zadigitalno upravljanje elektri~nim pogonima ni`ih i srednjihperformansi i poseduje analogni interfejs sa dva 10-b A/D sa8 ulaza i vremenom konverzije od 6 µs. Analogni interfejsprihvata unipolarne signale (0-5V) pa se uobi~ajenibipolarni signali povratne sprege moraju uobli~iti dodatnimkolima. Signalni procesor C240 poseduje i periferijskeure|aje za generisanje regularne i space-vector {irinskemodulacije kao i broja~ki sistem za prihvatanje signala sainkrementalnog enkodera, {to omogu}uje da se pogonskikontroler realizuje sa minimalnim brojem eksternihkomponenti. Signalni procesor numeri~ke snage 40 MIPSobavlja operaciju celobrojnog mno`enja sa 32-bitnimrezultatom za 50 ns. Procesor raspola`e unutra{njom flashmemorijom veli~ine 16 Kwords i SRAM memorijomveli~ine 2Kwords, pa ne postoji potreba za eksternimmemorijskim jedinicama. Prisustvo flash memorije koja jepodeljena na blokove ~ini mogu}om izmenu programa utoku rada. Napredni SPI i SCI serijski komunikacionimoduli visoke propusne mo}i predvi|eni su za potrebepovezivanja sa nadre|enim ra~unarom.
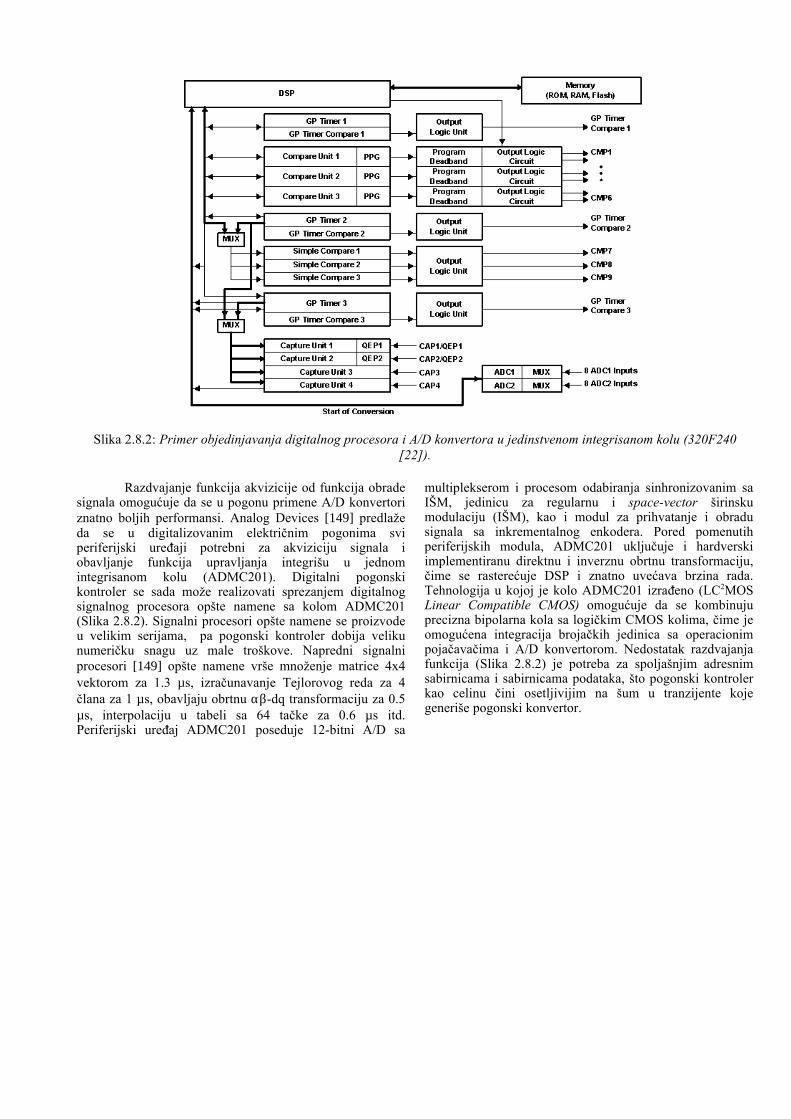
Slika 2.8.2: Primer objedinjavanja digitalnog procesora i A/D konvertora u jedinstvenom integrisanom kolu (320F240[22]).
Razdvajanje funkcija akvizicije od funkcija obradesignala omogu}uje da se u pogonu primene A/D konvertoriznatno boljih performansi. Analog Devices [149] predla`eda se u digitalizovanim elektri~nim pogonima sviperiferijski ure|aji potrebni za akviziciju signala iobavljanje funkcija upravljanja integri{u u jednomintegrisanom kolu (ADMC201). Digitalni pogonskikontroler se sada mo`e realizovati sprezanjem digitalnogsignalnog procesora op{te namene sa kolom ADMC201(Slika 2.8.2). Signalni procesori op{te namene se proizvodeu velikim serijama, pa pogonski kontroler dobija velikunumeri~ku snagu uz male tro{kove. Napredni signalniprocesori [149] op{te namene vr{e mno`enje matrice 4x4vektorom za 1.3 µs, izra~unavanje Tejlorovog reda za 4~lana za 1 µs, obavljaju obrtnu αβ-dq transformaciju za 0.5µs, interpolaciju u tabeli sa 64 ta~ke za 0.6 µs itd.Periferijski ure|aj ADMC201 poseduje 12-bitni A/D sa
multiplekserom i procesom odabiranja sinhronizovanim saI[M, jedinicu za regularnu i space-vector {irinskumodulaciju (I[M), kao i modul za prihvatanje i obradusignala sa inkrementalnog enkodera. Pored pomenutihperiferijskih modula, ADMC201 uklju~uje i hardverskiimplementiranu direktnu i inverznu obrtnu transformaciju,~ime se rastere}uje DSP i znatno uve}ava brzina rada.Tehnologija u kojoj je kolo ADMC201 izra|eno (LC2MOSLinear Compatible CMOS) omogu}uje da se kombinujuprecizna bipolarna kola sa logi~kim CMOS kolima, ~ime jeomogu}ena integracija broja~kih jedinica sa operacionimpoja~ava~ima i A/D konvertorom. Nedostatak razdvajanjafunkcija (Slika 2.8.2) je potreba za spolja{njim adresnimsabirnicama i sabirnicama podataka, {to pogonski kontrolerkao celinu ~ini osetljivijim na {um u tranzijente kojegeneri{e pogonski konvertor.
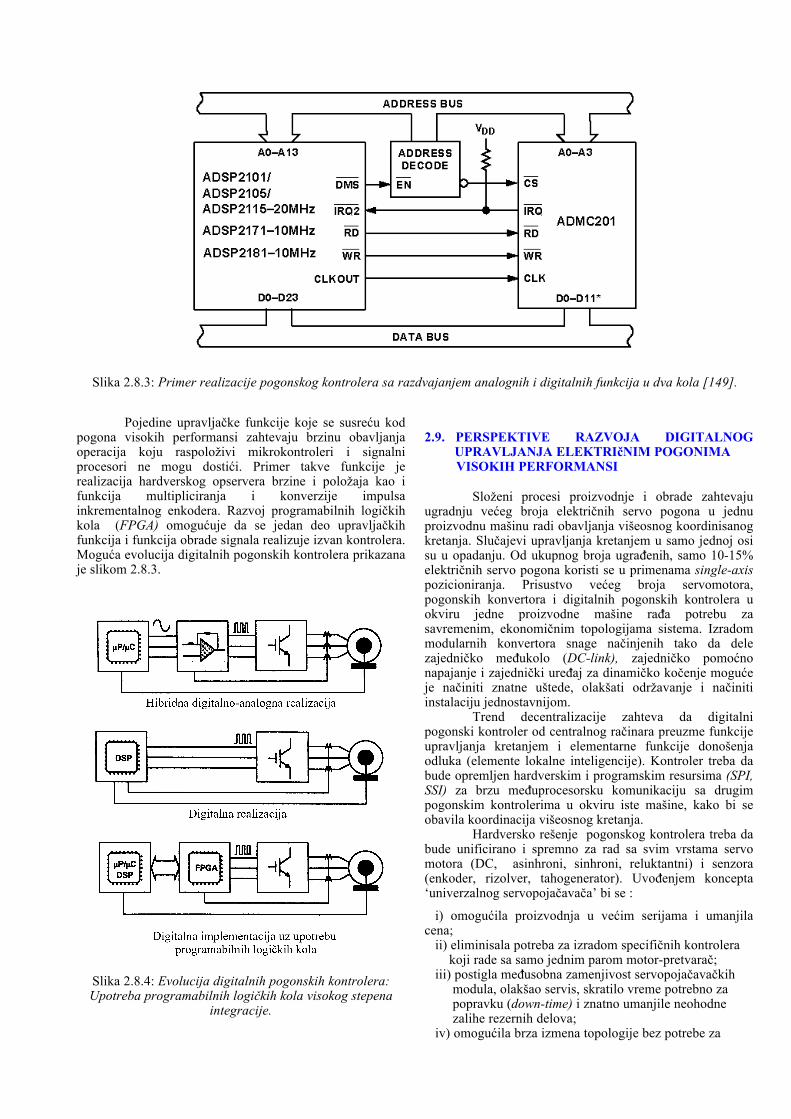
Slika 2.8.3: Primer realizacije pogonskog kontrolera sa razdvajanjem analognih i digitalnih funkcija u dva kola [149].
Pojedine upravlja~ke funkcije koje se susre}u kodpogona visokih performansi zahtevaju brzinu obavljanjaoperacija koju raspolo`ivi mikrokontroleri i signalniprocesori ne mogu dosti}i. Primer takve funkcije jerealizacija hardverskog opservera brzine i polo`aja kao ifunkcija multipliciranja i konverzije impulsainkrementalnog enkodera. Razvoj programabilnih logi~kihkola (FPGA) omogu}uje da se jedan deo upravlja~kihfunkcija i funkcija obrade signala realizuje izvan kontrolera.Mogu}a evolucija digitalnih pogonskih kontrolera prikazanaje slikom 2.8.3.
Slika 2.8.4: Evolucija digitalnih pogonskih kontrolera:Upotreba programabilnih logi~kih kola visokog stepena
integracije.
2.9. PERSPEKTIVE RAZVOJA DIGITALNOGUPRAVLJANJA ELEKTRI~NIM POGONIMA
VISOKIH PERFORMANSI
Slo`eni procesi proizvodnje i obrade zahtevajuugradnju ve}eg broja elektri~nih servo pogona u jednuproizvodnu ma{inu radi obavljanja vi{eosnog koordinisanogkretanja. Slu~ajevi upravljanja kretanjem u samo jednoj osisu u opadanju. Od ukupnog broja ugra|enih, samo 10-15%elektri~nih servo pogona koristi se u primenama single-axispozicioniranja. Prisustvo ve}eg broja servomotora,pogonskih konvertora i digitalnih pogonskih kontrolera uokviru jedne proizvodne ma{ine ra|a potrebu zasavremenim, ekonomi~nim topologijama sistema. Izradommodularnih konvertora snage na~injenih tako da delezajedni~ko me|ukolo (DC-link), zajedni~ko pomo}nonapajanje i zajedni~ki ure|aj za dinami~ko ko~enje mogu}eje na~initi znatne u{tede, olak{ati odr`avanje i na~initiinstalaciju jednostavnijom.
Trend decentralizacije zahteva da digitalnipogonski kontroler od centralnog ra~inara preuzme funkcijeupravljanja kretanjem i elementarne funkcije dono{enjaodluka (elemente lokalne inteligencije). Kontroler treba dabude opremljen hardverskim i programskim resursima (SPI,SSI) za brzu me|uprocesorsku komunikaciju sa drugimpogonskim kontrolerima u okviru iste ma{ine, kako bi seobavila koordinacija vi{eosnog kretanja.
Hardversko re{enje pogonskog kontrolera treba dabude unificirano i spremno za rad sa svim vrstama servomotora (DC, asinhroni, sinhroni, reluktantni) i senzora(enkoder, rizolver, tahogenerator). Uvo|enjem koncepta‘univerzalnog servopoja~ava~a’ bi se :
i) omogu}ila proizvodnja u ve}im serijama i umanjilacena; ii) eliminisala potreba za izradom specifi~nih kontrolera koji rade sa samo jednim parom motor-pretvara~; iii) postigla me|usobna zamenjivost servopoja~ava~kih modula, olak{ao servis, skratilo vreme potrebno za popravku (down-time) i znatno umanjile neohodne zalihe rezernih delova; iv) omogu}ila brza izmena topologije bez potrebe za

zamenom modula.
Modularnost je potrebno ostvariti i na nivouprograma za upravljanje i komunikaciju. U praksi se koristirelativno veliki broj upravlja~kih struktura, serijskihkompenzatora i filtera. Postoji i znatan broj razli~itihradnih re`ima, kao {to je upravljanje momentom, brzinomili polo`ajem. Neophodno je pojedine upravlja~ke funkcijei blokove realizovati kao module koje korisnik u faziinstalacije mo`e selektovati i povezati uz pomo} naro~itoggrafi~kog programskog alata za instalaciju i pode{avanjeservo pogona. Na ovaj na~in, korisnik bi se aktivno uklju~iou kreiranje kona~ne strukture upravlja~kog programa, {to bidalo znatno ve}u fleksibilnost nego u slu~aju pode{avanjaputem izmene parametara.
Uo~ljiv je trend izme{tanja ekolo{ki agresivnihproizvodnih procesa, a u poslednje vreme svih procesamaterijalne proizvodnje iz razvijenih u manje razvijenezemlje. Posledica ovog trenda je sve lo{ija tehni~kaobu~enost osoblja koje vr{i instalaciju i odr`avanje servopogona. U ovim uslovima, potrebno je obezbeditimaksimalnu automatizaciju postupaka instalacije pomo}usavremenog programskog alata za instalaciju i pode{avanjeservo pogona. Programski alat treba da u {to ve}oj meripreuzme funkcije odre|ivanja strukture i parametaramehani~kog podsistema ma{ine, formulisanja kriterijumaperformanse, selekcije optimalne upravlja~ke strukture sapotrebnim kompenzatorima i pode{avanja parametera. Uidealnom slu~aju, humani operator bi na~inio uvid upredlo`enu strukturu i parametre pa ih potom prihvatio iliodbacio.
Produktivnost i kvalitet obrade u centrima zama{insku obradu i proizvodnju zavise od karakteristikaugra|enih servosistema. Brzina reagovanja i ta~nostelektri~nog servo pogona su{tinski zavise od numeri~kesnage digitalnog pogonskog kontrolera, pa postoji zavisnostbrzine i kvaliteta obrade od broja instrukcija koje pogonskikontroler (servoprocesor) mo`e da obavi u jedinici vremena.(MIPS). Savremeni servo pogoni zahtevaju primenuslo`enih algoritama za procenu stanja asinhronih, sinhronihi reluktantnih servo motora, primenu vektorskog upravljanjai rasprezanja kontura fluksa i momenta, realizacijunaprednih struktura za upravljanje statorskom strujom kao iizvr{avanje servo funkcija sa regulacijom brzine i polo`aja.Potreba za minimizacijom broja senzora i indirektnimodre|ivnjem stanja pogona, kao i neophodnost identifikacijeparametara u toku rada znatno uve}avaju numeri~kooptere}enje procesora.
Parametri i stanja se sve ~e{}e izdvajaju krozanalizu spektralnog sastava terminalnih veli~ina.Uspostavljanje povratne sprege po stanju koje je odre|enoanalizom spektra zahteva da se FFT, SSA ili ciklusparametarske estimacije spektra okon~a u vremenu od500µs do 1ms, pa se mo`e zaklju~iti da su dalji razvojalgoritama upravljanja i pobolj{anje performansi servopogona zavisni od raspolo`ivosti digitalnih signalnihprocesora velike brzine rada i niske cene. Brzina radadigitalnih kola u MOS tehnologiji zavisi od geometrijeelementarnog tranzistora (du`ine kanala). Savremenetehnologije izrade omogu}uju realizaciju elementarnihtranzistora sa kanalima ~ija je projektovana du`ina od 300do 500 nm dok je efektivna du`ina kanala realizovanihtranzistora od 250 do 380 nm. Kanal nije mogu}e skratitiispod fizi~ke granice od 100nm, jer bi ve} kod geometrijeod 100nm temperaturne oscilacije elemenata kristalne
re{etke neprihvatljivo uve}ale statisti~ko o~ekivanjene`eljenog provo|enja, dok bi njihova migracija rezultovalamalom pouzdano{}u i kratkim `ivotnim vekomkomponente. Analize pokazuju da je ve} kod 1000 nmgeometrija 50% od ukupnog ka{njenja u prostiranju signalaka{njenje kroz elementarni tranzistor, dok se preostalih 50%ima na me|uvezama. Iz izlo`enog bi se moglo zaklju~iti dau budu}nosti ne treba o~ekivati dramati~na uve}anjau~estanosti rada digitalnih kontrolera. Brzine radapostoje}ih naprava mogu znatno prevazi}i 200 MHz. Novare{enja signalnih procesora numeri~ku snagu uve}avajuuglavnom [23] kroz paralelno obavljanje funkcija, po cenikoja onemogu}ava njihovu primenu u digitalno upravljanimpogonima. Predvi|anja za 2002. godinu su optimisti~ka:
TABELA 2.9.-I: Trendovi performansii cena procesora signala.
Godina: Cena: Mogu}nosti: Potro{nja:1992. $ 15 40 MIPS 5V 300mA2002. $ 1.5 400 MIPS 3.3V 40 mA
3. ELEKTRI~NI POGONI OP{TE NAMENE I PERSPEKTIVE PRIMENE POGONA U URE|AJIMA [IROKE POTRO{NJE.
Ekonomi~na re{enja regulisanih elektri~nih pogonamogu na}i masovnu primenu u industrijskim procesima, gdeje potrebno posti}i u{tede energije i uve}ati pouzdanost, kaou okviru ku}nih aparata gde je od zna~aja uve}anje komforai umanjenje cene. Primeri ovakvih primena su pogonipumpi, ventilatora, kompresora, mlinovi, ma{ine za pranjerublja i su|a, ure|aji za grejanje i klimatizaciju i mnogidrugi. Brzinu obrtanja je potrebno pode{avati relativnosporo, sa umerenom ta~no{}u. U skoro svim slu~ajevima,me|utim, potrebno je obezbediti {to ve}i polazni moment,{iroku oblast rada sa konstantnom snagom i minimiziratigubitke snage u motoru i pretvara~u, pa se ~esto primenjujealgoritam vektorskog upravljanja pogonom bez dava~a naosovini (DFOC). Pored zahteva za u{tedom energije,minimalnim brojem senzora i malim tro{kovimaodr`avanja, od pogona op{te namene tra`i se da zvu~no,toplotno i elektromagnetno zaga|enje okoline bude {tomanje. Ovakvi zahtevi su naro~ito o{tri kod primena usavremenim ku}nim aparatima i pogona u prostorijama sastalnim ljudskim prisustvom. Radi umanjenja emitovanihsmetnji, pobolj{anja faktora snage i razvijaju se novipoluprovodni~ki prekida~i i nove topologije pretvara~a. Unastojanju da se na~ine {to ekonomi~niji pogoni za masovnuproizvodnju ula`u se znatni istra`iva~ki i razvojni napori uslede}im pravcima: i) Realizacija novih, ekonomi~nih i lakoproizvodivih motora (SR); ii) Razvoj novih topologijakonvertora sa umanjenim brojem prekida~a; iii) Razvojalgoritama za procenu parametara i stanja koji omogu}ujueliminaciju velikog broja senzora; i iv) Objedinjavanjesekcije snage pogonskog konvertora sa signalno-upravlja~kim sklopovima i integracija motora i konvertora.U narednom poglavlju }e biti izlo`eno stanje, problemi itrendovi razvoja elektri~nih pogona op{te namene.
3.1 ELEKTRI~NI POGONI SA MINIMALNIMBROJEM SENZORA.
Relativno visoka cena frekvencijski regulisanihpogona kao i nere{eni problemi su uzrok relativno sporomuve}anju njihovog broja. U industrijskim primenama se

ugradnja regulisanog elektri~nog pogona ~esto izbegavaukoliko postoje alternativna re{enja. Zastoj u primeni ovihpogona se mo`e razre{iti razvojem ekonomi~nijih ikompaktnijih pogonskih re{enja. Cena motora i konvertoraje naro~ito va`na kod primene u ku}nim aparatima.Umanjenje cene je su{tinski povezano sa zna~ajnomredukcijom broja senzora koji se u pogonu koriste.Neophodno je eliminisati dava~ ugra|en na osovinu motorai smanjiti broj upotrebljenih dava~a struje.
3.1.1 UPRAVLJANJE POGONOM SA UMANJENIMBROJEM DAVA~A STRUJE.
Prodor frekvencijski regulisanih pogona saasinhronim motorom u oblast elektri~nih pogonapromenljive brzine je u velikoj meri odre|en cenomkonvertora snage i pogonskog kontrolera. Veliki brojugra|enih dava~a umanjuje pouzdanost sustema,komplikuje povezivanje delova sistema u znatno uve}avacenu. Zato se te`i da se merenja u pogonu svedu naminimalna potrebna, kao i da se primene estimatori iopserveri za stanja koja se direktno ne mere. U okviruregulisanog pogona ~esto se sre}u 3-4 senzora za merenjestruje (2 fazne struje, struja me|ukola, struja zemljospoja) ibarem jedan dava~ brzine ili polo`aja ugra|en na osovinumotora. Intenzivno se radi na razvoju naprednih algoritamaza upravljanje elektri~nim pogonom sa asinhronim motoromkoji bi trebali da omogu}e eliminaciju osovinskog dava~a(sensorless AC drive) i umanjenje broja dava~a strujeminimum – 1.
Green [222] predla`e da se merenje faznih strujaizostavi i da se potrebna informacija o njima izdvoji iz
struje me|ukola pogonskog konvertora (DC-link) i povorke{irinski modulisanih impulsa (PWM) za upravljanjeprekida~ima snage. Blaabjerg [228] pokazuje da se kodpogona sa samo jednim senzorom struje ugra|enim ume|ukolo mo`e ostvariti detekcija kratkog spoja izemljospoja, ~ime je otvorena mogu}nost da se ovakvipogoni u praksi i primena. Rekonstrukcija faznih struja izstruje me|ukola i da se {irinska modulacija realizuje naspecifi~an na~in [223]. Habetler [224] ukazuje na ~injenicuda je struja me|ukola jednaka nuli za vreme trajanja nultihnaponskih vektora, pa je tada rekonstrukcija faznih strujaneostvariva. On predla`e da se primeni modulacija koja bikoristila isklju~ivo aktivne vektore, no ovakav pristup dajeznatna uve}anja u valovitosti struje i momenta. Mohnigan[226] predla`e da se konvencionalna {irinska modulacijamodifikuje tako {to bi se eliminisali naponski impulsi kojisu tako uzani da je rekonstrukcija faznih struja za vremenjihovog trajanja neostvariva. Riese [227] predla`e da segre{ka u modulaciji, prouzrokovana eliminacijom uzanihimpulsa kompenzuje primenom impulsa dvostruke {irine unarednoj periodi {irinske modulacije. Primenom ovogpristupa i vr{enjem odabiranja u centru naponskih impulsa[226] omogu}ena je rekonstrukcija faznih struja iz strujeme|ukola u svim radnim re`imima kao i uklanjanje uticajavalovitosti struje na dobijenu povorku odbiraka. Bo`i} [247]dokazuje analiti~ki i eksperimentalno da se rekonstruisanisignali faznih struja mogu koristiti za uspostavljanjepovratne sprege kod svih vrsta strujnih regulatora.Rezultuju}e karakteristike u potpunosti zadovoljavajupotrebe elektri~nih pogona op{te namene i potrebe servopogona umerenih performansi.
Struja me|ukola za razli~ite vektore napone (V0-V7):
V0 = 000 ⇒ Idc = 0 V4 = 100 ⇒ Idc = - Ia
V1 = 100 ⇒ Idc = + Ia V5 = 100 ⇒ Idc = + Ic
V2 = 110 ⇒ Idc = - Ic V6 = 100 ⇒ Idc = - Ib
V3 = 010 ⇒ Idc = + Ib V7 = 100 ⇒ Idc = 0
Slike 3.1.1.1: Rekonstrukcija statorskih struja iz struje me|ukola.

3.1.2 POGONI SA ASINHRONIM MOTOROM BEZ DAVA~A BRZINE
Algoritam za indirektno odre|ivanje brzineobrtanja koji bi potrebu informaciju obezbedio u svimradnim re`imima pogona jo{ uvek ne postoji. Prakti~nizna~aj uklanjanja dava~a na osovini i eventualne realizacijesensorless pogona ~ini da veliki broj istra`iva~a {irom svetaispituje razli~ite pristupe izdvajanju signala brzine izterminalnih veli~ina – statorskih struja i napona. Naj~e{}ese vr{i estimacija statorskog fluksa integracijomelektromotorne sile, izra~unate iz terminalnih veli~ina ipretpostavljenih vrednosti parametara statorskog kola.Potom se iz podataka o statorskim strujama i fluksuodre|uju rorotski fluks, moment, klizanje i brzina obrtanjarotora [248] pomo}u nelinearnih estimatora i/ili opserverakoji zahtevaju poznavanje manjeg ili ve}eg brojaparametera motora.
Ragnar [242,243] predla`e originalnu strukturu(Natural Field Orientation) u kojoj se ugaona brzinaobrtnog polja odre|uje na osnovu procenjene vrednostielektromotorne sile u grani magne}enja motora. Predlo`enasensorelss struktura omogu}uje regulisanje momenta i kodzaustavljenog pogona, ali zahteva poznavanje otpornostistatora (RS) i kompenzaciju mrtvog vremena konvertorasnage.
Glavni problem u realizaciji sensorless pogona saasinhronim motorom je odre|ivanje elektromotorne sileindukovane u statorskom namotajima i njena integracija.Statorski napon se gotovo nikada ne meri, ugradnjadodatnih dava~a napona i obrada ovih signala dodatno biposkupeli pogon. Statorski napon se procenjuje na osnovupovorke {irinski modulisanih impulsa koje sam digitalnikontroler pogona generi{e za svrhu upravljanja prekida~imasnage i zadavanja napona. Pad napona na poluprovodni~kimprekida~ima, kona~no vreme promene stanja i neophodnomrtvo vreme [249] prouzrokuju razlike izme|u aktuelne iprocenjene vrednosti statorskog napona [167]. Odstupanjasu naro~ito velika u oblasti malih brzina. Problempredstavlja i odre|ivanje fluksa iz procenjeneelektromotorne sile. Neophodno je izvr{iti integraciju, pa sejavlja problem ofseta i gre{ke stacionarnog stanja. Bose[164] predla`e da se digitalna integracija zameni filtracijompomo}u dva redno povezana niskopropusna filtra prvog redasa promenljivim parametrima. Prese~nu u~estanost jepodrebno menjati u funkciji radnog re`ima tako da faznoka{njenje svakog ~lana bude uvek π/4. Uz kompenzacijuamplitudne karakteristike, posti`e se uklanjanje problemaofseta kod integracije i ostvarivanje potrebnog faznogpomeraja od 90o.
Bla{ko [172] pokazuje da gre{ka u proceni stanjasensorless pogona mo`e biti prouzrokovana prisustvomvalovitosti (ripple) na u~estanosti komutacije u signalimakoji se odabiraju, konvertuju (A/D) i uvode u digitalnipogonski kontroler radi dalje obrade. U~estanost odabiranjaje ~esto jednaka komutacionoj, pa je neophodno primenitinaro~ite mere i filtre (anti-alias) u procesu obrade iodabiranja ulaznih signala. Odabiranje u centru naponskihimpulsa omogu}ava da se uticaj valovitosti na u~estanostikomutacije umanji. Potrebno je, me|utim, posedovatinaro~ita odabira~ka (S/H) kola i obezbediti njihovu spregusa {irinskim modulatorom. Lokalnim usrednjavanje merenih
signala u svakoj periodi komutacije je jednostavnije iomogu}uje potpuno uklanjanje {uma na u~estanostikomutacije. Lokalnim usrednjavanjem se u sistem unosika{njenje, pa se mogu o~ekivati odzivi sporiji nego kodsistema sa odabiranjem u centru naponskog impulsa.O~ekivane u~estanosti propusnog opsega za jedan i drugislu~aj su fPWM/10 i fPWM/27 [172]. U pogonima op{te namenebrzina odziva nije od presudnog zna~aja, pa se u praksiobrade pogonskih signala biraju re{enja koja ne zahtevajuslo`ena kola.
Odre|ivanje elektromotorne sile zahtevapoznavanje statorskog otpora. Sensorless pogon je osetljivna varijacije ovog parametra naro~ito u oblasti malih brzina.Otpor statorskog namotaja asinhronog motora pokazujeslabu zavisnost [92] od u~estanosti, ali zato termalni driftmo`e iznositi +/-25% i ugroziti performanse i stabilnostpogona. Kerkman [182] predla`e gradnju paralelnogunutra{njeg modela pogona, detekciju odstupanjapromenljivih modela od estimiranih veli~ina pogona iidentifikaciju statorskog otpora na bazi utvr|enih razlika.Habetler [230] predla`e identifikaciju RS zasnovanu napodatku o amplitudi fluksa, dobijenom iz hibridnogestimatora. Kako su postoje}a re{enja osetljiva na varijacijepreostalih parametera motora, identifikacija RS se ne smatrare{enom i predmet je daljeg intenzivnog rada.
Varijacija parametra RS, gre{ke u integracijielektromotorne sile i odstupanja prouzrokovana mrtvimvremenom prouzrokuju gre{ke u proceni amplitude iprostorne orijentacije fluksa. Ve}ina struktura za upravljanjefluksom i momentom asinhronog motora bez osovinskogdava~a operi{e sa varijablama u obrtnom d-q koordinatnomsistemu. Polo`aj d-q sistema se redovno defini{e tako da sed-osa po pravcu poklapa sa vektom fluksa. Dakle, gre{ke uproceni prostorne orijentacije fluksa rezultuju pogre{nimpolo`ejem referentnog sistema. Kao posledica, javljaju segre{ke u vr{enju direktne i inverzne obrtne transformacije,ne`eljena sprega kontura za regulaciju fluksa i momenta,oscilatoran odziv, a u ekstremnim slu~ajevima inestabilnost. U cilju prevazila`enja problema, Okuyamapredla`e primenu upravlja~ke strukture u kojoj se brzina d-qkoordinatnog sistema odre|uje na osnovu detektovanegre{ke u iQ komponenti statorske struje. Predlo`enastruktura funkcioni{e sli~no fazno spregnutoj petlji, pri~emu odstupanje ∆iQ ima istu ulogu kao izlaz faznogdetektora u okviru PLL. Jung [166] predla`e da se gre{ke uorijentaciji d-q sistema detektuju tako }to se u d-osu (osumagnetizcije) injektuju pulsacije visoke u~estanosti.Niskopropusni karakter funkcije prenosa u d-osi ~ini da uslu~aju korektno odre|enog polo`aja d-q sistema ne postojepulsacije momenta i brzine obrtanja. Kod gre{ke uprostornoj orijentaciji, injektovane pulsacije se delomreflektuju i na aktuelnu q-osu, pa se javljaju pulsacijemomenta i brzine. Korelacijom detektovanih pulsacija sainjektovanim test-signalom mo`e se utvrditi gre{ka polo`ajad-q sistema. Ovako dobijena informacija se mo`e upotrebitiza direktno upravljanje ili u svrhu identifikacije statorskeotpornosti.
Savremeni pristupi upravljanju asinhronimmotorom bez senzora na osovini zasnovani na detekcijistatorske elektromotorne sile ne pru`aju zadovoljavaju}ekarakteristike u oblasti statorskih u~estanosti manjih od 1Hz. Informacija o stanjima pogona, sadr`ana uelektromotornoj sili, proporcionalna je brzini obrtanja polja
(t.j. statorskoj u~estanosti). U oblasti niskih u~estanosti (f <1 Hz), amplituda korisnog signala (EMF) je za 1-2 redaveli~ine manja od {uma i termogenog (RS iS ) pada napona,pa rad pogona u praksi nije mogu}. Jansen [180] predla`e dase u ovim slu~ajevima polo`aj i brzina rotora odrede naosnovu detektovane varijacije induktivnosti rasipanja injene zavisnosti od relativnog polo`aja statora i rotora.Usled nesavr{enosti u konstrukciji asinhronog motora(kona~an broj statorskih i rotorskih `lebova) magnetni otporna putu fluksa magnetizacije i putu rasipnog fluksa [174]varira. Efekti prostorno raspodeljenenih varijacija umagnetnom otporu (anizotropija) prouzrokuju varijacije umagnetizacionoj i rasipnoj induktivnosti. Odre|ivanjeimpedanse motora i utvr|ivanje promena u induktivnostimaosnov je za izra~unavanje brzine, amplitude i polo`ajafluksa. Jansen i Lorenz [181] pokazuju da zasi}enjemagnetnog materijala u delovima ma{ine koji se nalaze upravcu prostiranja fluksa prouzrokuje efekte zasi}enjemizazvane anizotropije (SIS Saturation Induced Saliency).Prostim merenjem zavisnosti rasipne induktivnosti od uglamo`e se utvrditi pravac u kome je ona minimalna. PremaJansen-u, u detektivanom pravcu nalazi se vektor statorskogfluksa.
Varijacija magnetnog otpora prouzrokovanao`ljebljenjem mo`e biti iskori{}ena za direktno odre|ivanjebrzine obrtanja asinhronog motora. Hurst [192] pokazuje dainduktivnost rasipanja asinhronog motora prilikom obrtanjabiva modulisana i varira sa u~estano{}u koja zavisi od brojarotorskih i statorskih `lebova, kao i od brzine obrtanjarotora. U spektru terminalnih veli~ina pojavljuju sekomponente ~ija je u~estanost umno`ak brzine obrtanjarotora. Analizom spektra terminalnih veli~ina mogu}e jeutvrditi `eljenu brzinu obrtanja bez poznavanja preostalihparametara motora. Pri tome je neophodno izvr{itiinterpolaciju izme|u susednih ~lanova diskretnog spektra iliprimeniti algoritam parametarske estimacije spektraadekvatan zahtevima primene [193].
Bose i Patel [165] predla`u da se u re{enjuproblema realizacije pogona bez osovinskog dava~a iskoristifleksibilnost neuronske mre`e i robusnost fuzzy strukture.Bose uo~ava da DFOC algoritam upravljanja dajezadovoljavaju}e rezultate za sve statorske u~estanosti kojesu jednake ili ve}e od nazivne u~estanosti klizanja. Uoblasti ni`ih u~estanosti (f < 1 Hz), rad pogona nije mogu}.U istoj oblasti mo`e se, me|utim primeniti algoritamindirektne vektorske kontrole (IFOC). IFOC algoritamzahteva merenje brzine obrtanja rotora, ali se rotor zau~estanosti f < 1 Hz mo`e smatrati zaustavljenim. Ovomaproksimacijom pravi se relativno mala gre{ka. PrimenaIFOC algoritma omogu}uje zadovoljavaju}u kontrolu nadmomentom koji pogon razvija u fazi polaska. Po uve}anjubrzine obrtanja i u~estanosti napajanja, mo`e se aktiviratiDFOC struktura, kojoj se poverava upravljanje pogonom udaljem radu. Dono{enje odluke o komutaciji izme|u IFOC iDFOC upravlja~kih struktura na nelinearan na~in zavisi odzadate vrednosti momenta i statorske u~estanosti.Predlo`ena struktura uklju~uje ‘quasy-fuzzy’ estimatorstatorskog otpora i algoritam za minimizaciju gubitakazasnovan na neuronskoj mre`i. Osetljiva integracijaelektromotorne sile u DFOC strukturi realizovana je uzpomo} vi{estepenih prilagodivih filtara, ~iju prese~nuu~estanost treba menjati u funkciji statorske u~estanosti.
3.1.3 POGONI SA SINHRONIM MOTOROM BEZ DAVA~A BRZINE
U primenama elektri~nih pogona op{te namene gdese pored niske cene zahteva i visoka efikasnost, malozagrevanje rotora i visoka specifi~na snaga, koriste sesinhroni motori sa permanantnim magnetima (PM) narotoru. Primeri ovakve primene su kompresori i pumpe zapotiskivanje fluida u rashladnim sistemima kao i pogoni usistemima za grejanje, ventilaciju i klimatizaciju, kao i nekeindustrijske primene brzinskih servomehanizama. Potrebnoje, kao i u slu~aju pogona sa asinhronim motorom, razvitialgoritme upravljanja koji obezbe|uju eliminaciju dava~ana osovini motora. Za razliku od asinhronog motora,sinhroni PM motor ne mo`e raditi u otvorenoj petlji.Uobi~ajeni pristup upravljanju sinhronim motorom bezosovinskog dava~a je polazak motora u feed-forward modu.Vektor statorske struje se postepeno ubrzava dok seamplituda odr`ava na vrednosti 2-3 Inom. Ukoliko polaznimoment ne prevazilazi nominalni i ne iskazuje naglepromene, rotor }e pratiti ubrzavanje vektoramagnetopobudne sile statora na ugaonom rastojanjuproporcionalnom momentu optere}enja. Nakon dostizanja1-5% nazivne brzine, sti~u se uslovi za odre|ivanje polo`ajarotora [28] i pa se upravljanje na dalje vr{i u zatvorenojsprezi, uz orijentaciju vektora struje u odnosu nadetektovani polo`aj rotora.
Ryoji [168] pokazuje da se polo`aj rotorasinhronog motora mo`e pouzdano odrediti kod ukoliko supermanentni ugra|eni u unutra{njost magnetnog kola rotora.Mogu}a je ugradnja sa tangencijalnom i radijalnommagnetizacijom. U oba slu~aja postoji velika razlika umagnetnom otporu i induktivnosti d- u q-ose. Odre|ivanjepolo`aja rotora svodi se na utvr|ivanje ose u kojojinduktivnost statora ima ekstremnu vrednost. Sli~an pristuprealizaciji sensorless pogona sa sinhronim PM motorom imaFrench [179]. On predla`e da se najpre (off-line) zavisnostL(θ,i) induktivnosti statorskog namotaja od struje i polo`ajarotora eksperimentalno odredi i memori{e. U toku radapogona je potrebnom analizom valovitosti terminalnih strujai napona odre|ivati induktivnost statora i njenu prostornuraspodelu. Konfrontacijom podataka dobijenih merenjem imemorisanih vrednosti L(θ,i) odre|uje se polo`aj rotora.
Schmidt [169] predla`e algoritam za odre|ivanjepolo`aja koji se mo`e primeniti i na sinhrone motore kodkojih su permanentni magneti ugra|eni na povr{inu rotora ikod kojih je rotorsko magnetno kolo izotropno (Ld = Lq ).Predlo`eni algoritam je pogodan odre|ivanje polo`ajarotora pri polasku pogona. Na krajevima pojednih faznihnamotaja odr`ava se pozitivan napon sve dok naglouve}anje strmine promene fazne struje ne uka`e na pojavumagnetnog zasi}enja u osi date faze. Kako je nivo zasi}enjaunapred poznat, dok fluks faznog namotaja sadr`ikomponentu proporcionalnu struji i doprinos rotorskogfluksa, na pomenuti na~in se indirektno odre|uje doprinospermanentnih magneta fluksu pojedinih faznih namotaja. Izovako odre|enih projekcija rotorskog fluksa na osepojedinih faza mogu}e je odrediti inicijalni polo`aj rotora.Inicijalni polo`aj omogu}uje pokretanje motora izmirovanja. Nakon pokretanja, potrebno je primeniti neki odmetoda za odre|ivanje polo`aja rotor au toku rada[28,168,179].
3.1.4 POGONI BEZ DAVA~A BRZINE U KU}NIM APARATIMA

Razvoj elektri~nih pogona bez senzora na osoviniuslov je za uspe{nu upotrebu regulisanih pogona u ku}nimaparatima i automobilima. U ovim primenama zahteva sepojednostavljenje motora, konvertora i minimalan brojsenzora kako bi se postigla mala cena. Pored asinhronihmotora, primenu nalaze i redukovane konstrukcije sinhronihmotora sa permanentnim magnetima (monofazni, PM motorsa pomo}nom fazom) kao i dobro poznati univerzalnimotor. Umanjenje cene pogona treba o~ekivati krozevoluciju algoritama upravljanja i digitalnih pogonskihkontrolera koji }e omogu}iti realizaciju kompaktnih pogonasa minimalnim brojem prekida~a snage i malim brojemmerenja. U ovom pravcu su ve} na~injeni prvi koraci. Uistra`iva~kim laboratorijama SGS-Thompson na~injen jefuzzy pogonski kontroler koji omogu}uje veomaekonomi~no re{enje regulatora brzine univerzalnog motorau ku}nim aparatima bez potrebe za poznavanjem modelapogona i pode{avanjem parametera. Na Tehni~komUniverzitetu u Kluju (Rumunija) i Budimpe{ti razvijaju seelektri~ni pogoni za prekida~kim reluktantnim motorimabez dava~a brzine ~ije je upravljanje zasnovano natranspjuterima i fuzzy logici. O~ekuje se da }e upotrebajednostavnog motora bez senzora na osovini, visok stepenintegracije upravlja~kih kola i proizvodnja u velikimserijama omogu}iti {iroku primenu ovakvih pogona uku}nim aparatima.
3.2. PROBLEMI NESTABILNOG RADA IPODR`ANIH OSCILACIJA FREKVENCIJSKI REGULISANIH POGONA U OBLASTI NISKIH BRZINA
Frekvencijska regulacija brzine asinhronih motorasa kratko spojenim kavezom nalazi sve ve}u primenu upogonima pumpi, ventilatora i kompresora (PVK).Varijacija napona i u~estanosti uz konstantan odnos U/fzadovoljava u ve}ini primena, pa se PVK pogoni ~estorealizuju bez povratne spege. Konvertor se tada koristi kaokontrolisani izvor napona na ~ija se amplituda i u~estanostmogu kontinualno menjati. Brojne su i primene u kojimajedan pogonski konvertor napaja vi{e paralelno povezanihasinhronih motora. Poznato je da asinhroni motor napajan izizvora varijabilne u~estanosti u pogonu bez povratne spregemo`e postati nestabilan. Nesavr{enost konvertora (padnapona na prekida~ima, mrtvo vreme, ka{njenje impulsa) iprelazne pojave u me|ukolu i mehani~kom podsistemu[205, 206, 207, 218] prouzrokuju nestabilnost pogona ipodr`ane oscilacije u brzini i momentu. Nelinearna prirodaelektri~nog i mehani~kog podsisteme pogona ~ini da se ure`imima kod kojih je odziv na male poreme}aje slaboprigu{en ili nestabilan pojavljuju podr`ane oscilacije(sustained oscillations, oscilacije ~ija se amplituda pouspostavljanju uve}ava do odre|ene vrednosti na kojoj setrajno zadr`ava). Premda pomenuti re`imi ne uklju~ujuprogresivno uve}anje amplitude oscilacija, negativno se
odra`avaju na kvalitet, pouzdanost i efikasnost pogona pa jepa`nja ve}eg broja istra`iva~a usmerena ka istra`ivanjumogu}nosti za stabilizaciju [249,256].
Frekvencijski regulisani asinhroni motori ustandardnoj industrijskoj primeni mogu u}i u re`impodr`anih oscilacija pri brzinama manjim od polovinenazivne brzine [217,255,256]. Pojava nestabilnosti zavisi odparametara motora i optere}enja, kao i od radnog re`ima ikarakteristika konvertora snage. Ne javlja se kod svihpogona i ~e{}a je kod pogona velike snage. Premda senestabilnost mo`e pojaviti i u slu~aju da se motor napaja izidealnog naponskog izvora, Lipo [255] pokazuje da suosnovni uzroci nestabilnosti neuskla|enost parametaramotora i pretvara~a, kao i pojava razmene energije izme|upasivnih elemenata me|ukola i obrtnih masa mehani~kogpodsistema. Eksperimenti sa frekvencijski regulisanimasinhronom motorom koji radi u re`imu podr`anihoscilacija [256] pokazuju da je oscilacije mogu}e eliminisatiizvesnim odstupanjem od nominalnog odnosa U/f. Ueda[256] pokazuje da su u oscilatornom re`imu sve veli~ine(brzina, statorske struje, struja u me|ukolu, aktivna ireaktivna snaga) oscilatornog karaktera, ~ime je olak{anadetekcija i eventualna stabilizacija.
Mrtvo vreme pogonskog konvertora bitno uti~e naoblast nestabilnog rada [249]. Poznat kao dead-time ililockout-time, interval u kome su zako~ena oba prekida~a ujednoj fazi konvertora uvodi se pri svakoj komutaciji, kakobi se prekida~ ~ije je provo|enje okon~ano u potpunostizako~io pre uklju~enja komplementarnog prekida~a istefaze. Kako se kod nedovoljnih vrednosti mrtvog vremenapojavljuje kratak spoj me|ukola, u praksi se primenjujuintervali od 5 do 10 µs. Tokom mrtvog vremena napon naizlaznim priklju~cima ne zavisi od upravlja~kih signala ve}je odre|en smerom struje, {to dovovodi do izobli~enja ipojave niskofrekventnih harmonika u terminalnimveli~inama [217,257]. Pored izobli~enja, mrtvo vreme uti~ei na stabilnost [249] pogona. Efekti mrtvog vremena semogu kompenzovati na osnovu direktnog merenjastatorskog napona [258,259]. Potrebno je u pogon ugraditinaponske merne transformatore i signale proporcionalneaktuelnim vrednostima faznih napona uvesti u digitalnipogonski kontroler radi uspostavljanja povratne sprege ponaponu. Alternativno, nestabilnost pogona se mo`e se izbe}ii naro~itim izborom prigu{nice i kondenzatora u me|ukolu,[255,256], ali ovakav pristup dovodi do pogoršanja stati~kihkarakteristika motora. Napredne metode stabilizacije [249]ne zahtevaju ugradnju dodatnih senzora niti naro~it izborpasivnih komponenti u konvertoru, ve} se zasnivaju napovratnoj sprezi po struji me|ukola. Prigu{enje oscilacijaposti`e se relativno malim varijacijama zadatog napona iu~estanosti u funkciji merenog signala IDC. Problemstabilizacije grupe paralelno povezanih motora napajanih izistog invertora jo{ uvek nije na{ao adekvatno re{enje.

Ψω
ωω
Ψ
Ψ *
ω* ω
UsIs
s
VSI
+
MOTOR
SENZORI
I
Procena
FLUKSAKP+KI/s
KP+KI/s
Kslip
ω slip
r
r
Mem
Mem
Mref
r
Slika 3.2.1: Skalarno upravljanje asinhronim motorom omogu}uje odr`avanje zadatih vrednosti fluksa i momenta iprigu{enje oscilacija u oblasti niskih brzina.
3.3 TOPOLOGIJE KONVERTORA U POGONIMAOP{TE NAMENE
Pogonski konvertori pretvaraju energiju dobijenu iznapojne mre`e u oblik potreban za napajanje motora iupravljanje stanjima u elektri~nom i mehani~kompodsistemu pogona. U svetu postoji vi{e od 23 rali~itekombinacije u~estanosti i efektivne vrednosti napona umre`i za napajanje. ^esto se od pogonskog konvertorao~ekuje da bez izmena i pode{avanja obavlja normalan radkod bilo koje od pomenute 23 kombinacije. U najve}embroju slu~ajeva se na ulaznim i izlaznim priklju~cimapojavljuju trofazni sistemi napona i struja razli~itihu~estanosti. Konverzija energije se mo`e obaviti direktno,bez nepotrebnih me|ukoraka upotrebom topologije bezme|ukola poznate pod imenima ‘direktni konvertor’,‘matri~ni konvertor’ ili ‘frequency changer’ [236,237].Huber i Borojevi} [238] predla`u originalno re{enjeproblema komutacije kod matri~nog konvertora i razvijajualgoritme upravljanja za jednovremeno upravljanje ulaznimi izlaznim veli~inama: pored upravljanja naponom koji sedovodi na elektri~ni motor, mogu}e je jednovremenokontrolisati oblik struje i faktor snage na ulaznimpriklju~ima.
Problemi primene matri~nih konvertora suneophodnost izuzetno preciznog zadavanja signala zaupravljanje prekida~ima, osetljivost na ulazne tranzijente,odsustvo akumulacije energije u pretvara~u i nemogu}nostrada kod propada mre`nog napona, relativno veliki brojupotrebljenih prekida~a i slo`enost upravlja~kih algoritama.Premda matri~ni konvertor ima perspektive za daljeusavr{avanje, u savremenim pogonima se koriste topologijekonvertora sa jasno razdvojenim ispravlja~em, me|ukolom itrofaznim invertorom. Topologija je standardizovana do temere da proizvo|a~i poluprovodni~kih komponenti izra|ujukompaktne module koji u jednom ku}i{tu poseduju svepoluprovodni~ke elemente potrebne za gradnju ispravlja~a,invertora i ure|aja za dinami~ko ko~enje. Istra`iva~ki rad jeusmeren ka re{avanju sekundarnih problema [239] koji sukod pogonskih konvertora iza{li u prvi plan: problemielektromagnetne kompatibilnosti, akusti~ne buke, problemikoji proizilaze iz zajedni~kog rada motora i konvertora kao iproblemi pove}anja efikasnosti.
Va`na osobina industrijskih pogona je sposobnostkontinuiranog rada u uslovima povremenih propada naponanapajanja. Neregularnost mre`nog napona [241] se mo`emanifestovati kao kratkotrajno umanjenje amplitude, prekidfaze ili kratkotrajan prekid trofaznog napajanja. U ovimre`imima mogu}e je otpu{tanje relea i kontaktora kao iotkaz ra~unarske opreme. O~ekuje se da frekvencijski
regulisani pogon nastavi normalan rad i da ne do|e doprekida u obavljanju funkcija digitalnog pogonskogkontrolera. Ova sposobnost (ride through capability)obezbe|uje se tako [4,88,91] {to prekida~ki stepen zanapajanje pomo}nih i upravlja~kih kola pogona energijucrpi iz me|ukola pretvara~a. U slu~aju propada mre`nognapona, preduzima se kratkotrajno elektri~no ko~enje, ~imese deo kineti~ke energije akumulisan u mehani~kompodsistemu pogona konvertuje u elektri~nu, saop{tavame|ukolu i tako omogu}uje normalan rad upravlja~kih kola.U slu~aju du`ih pauza nije mogu}e nastaviti normalan radpa je po uspostavljanju normalnog napajanja neophodnoponoviti proceduru pokretanja sistema.
Velika brzina promene napona i struja u konvertorui motoru (dv/dt, di/dt) ~ini da spektar ovih veli~ina posedujerelativno veliku snagu u oblasti visokih u~estanosti.Pojedine frekvencijske komponente se mogu putem zra~enjaili provo|enjem preneti do drugih elektri~nih ure|aja iugroziti njihov rad. Naro~ito osetljivi deloviautomatizovanog proizvodnog procesa su digitalnikomunikacioni kanali izme|u CNC, PLC jedinica, senzora,aktuatora i frekvencijskih regulatora. Posebno kriti~neprimene su one u kojima napon napajanja prevazilazi 400V,gde postoji ve}i broj (>5) frekvencijski regulisanih pogonasa vezama du`im od 30m, gde je uzemljenje ure|ajaizvedeno nulovanjem a otpor uzemljiva~azgrade/postrojenja relativno veliki.
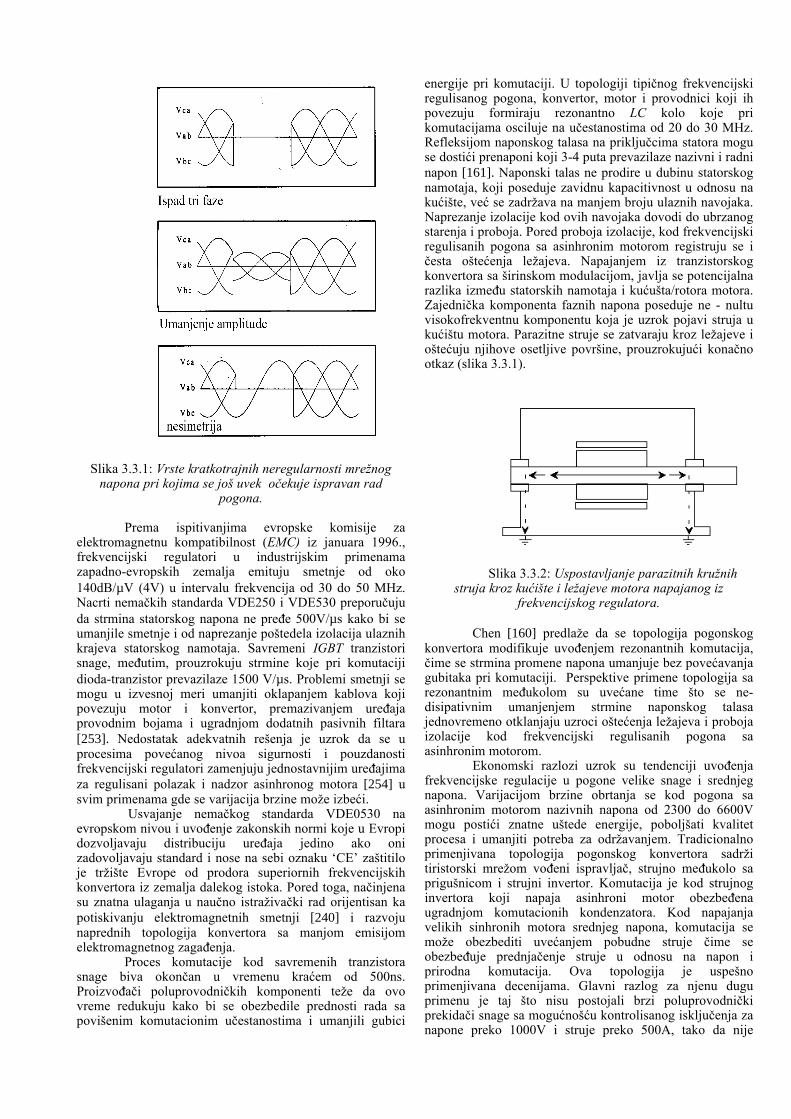
Slika 3.3.1: Vrste kratkotrajnih neregularnosti mre`nognapona pri kojima se jo{ uvek o~ekuje ispravan rad
pogona.
Prema ispitivanjima evropske komisije zaelektromagnetnu kompatibilnost (EMC) iz januara 1996.,frekvencijski regulatori u industrijskim primenamazapadno-evropskih zemalja emituju smetnje od oko140dB/µV (4V) u intervalu frekvencija od 30 do 50 MHz.Nacrti nema~kih standarda VDE250 i VDE530 preporu~ujuda strmina statorskog napona ne pre|e 500V/µs kako bi seumanjile smetnje i od naprezanje po{tedela izolacija ulaznihkrajeva statorskog namotaja. Savremeni IGBT tranzistorisnage, me|utim, prouzrokuju strmine koje pri komutacijidioda-tranzistor prevazilaze 1500 V/µs. Problemi smetnji semogu u izvesnoj meri umanjiti oklapanjem kablova kojipovezuju motor i konvertor, premazivanjem ure|ajaprovodnim bojama i ugradnjom dodatnih pasivnih filtara[253]. Nedostatak adekvatnih re{enja je uzrok da se uprocesima pove}anog nivoa sigurnosti i pouzdanostifrekvencijski regulatori zamenjuju jednostavnijim ure|ajimaza regulisani polazak i nadzor asinhronog motora [254] usvim primenama gde se varijacija brzine mo`e izbe}i.
Usvajanje nema~kog standarda VDE0530 naevropskom nivou i uvo|enje zakonskih normi koje u Evropidozvoljavaju distribuciju ure|aja jedino ako onizadovoljavaju standard i nose na sebi oznaku ‘CE’ za{titiloje tr`i{te Evrope od prodora superiornih frekvencijskihkonvertora iz zemalja dalekog istoka. Pored toga, na~injenasu znatna ulaganja u nau~no istra`iva~ki rad orijentisan kapotiskivanju elektromagnetnih smetnji [240] i razvojunaprednih topologija konvertora sa manjom emisijomelektromagnetnog zaga|enja.
Proces komutacije kod savremenih tranzistorasnage biva okon~an u vremenu kra}em od 500ns.Proizvo|a~i poluprovodni~kih komponenti te`e da ovovreme redukuju kako bi se obezbedile prednosti rada sapovi{enim komutacionim u~estanostima i umanjili gubici
energije pri komutaciji. U topologiji tipi~nog frekvencijskiregulisanog pogona, konvertor, motor i provodnici koji ihpovezuju formiraju rezonantno LC kolo koje prikomutacijama osciluje na u~estanostima od 20 do 30 MHz.Refleksijom naponskog talasa na priklju~cima statora moguse dosti}i prenaponi koji 3-4 puta prevazilaze nazivni i radninapon [161]. Naponski talas ne prodire u dubinu statorskognamotaja, koji poseduje zavidnu kapacitivnost u odnosu naku}i{te, ve} se zadr`ava na manjem broju ulaznih navojaka.Naprezanje izolacije kod ovih navojaka dovodi do ubrzanogstarenja i proboja. Pored proboja izolacije, kod frekvencijskiregulisanih pogona sa asinhronim motorom registruju se i~esta o{te}enja le`ajeva. Napajanjem iz tranzistorskogkonvertora sa {irinskom modulacijom, javlja se potencijalnarazlika izme|u statorskih namotaja i ku}u{ta/rotora motora.Zajedni~ka komponenta faznih napona poseduje ne - nultuvisokofrekventnu komponentu koja je uzrok pojavi struja uku}i{tu motora. Parazitne struje se zatvaraju kroz le`ajeve io{te}uju njihove osetljive povr{ine, prouzrokuju}i kona~nootkaz (slika 3.3.1).
Slika 3.3.2: Uspostavljanje parazitnih kru`nihstruja kroz ku}i{te i le`ajeve motora napajanog iz
frekvencijskog regulatora.
Chen [160] predla`e da se topologija pogonskogkonvertora modifikuje uvo|enjem rezonantnih komutacija,~ime se strmina promene napona umanjuje bez pove}avanjagubitaka pri komutaciji. Perspektive primene topologija sarezonantnim me|ukolom su uve}ane time {to se ne-disipativnim umanjenjem strmine naponskog talasajednovremeno otklanjaju uzroci o{te}enja le`ajeva i probojaizolacije kod frekvencijski regulisanih pogona saasinhronim motorom.
Ekonomski razlozi uzrok su tendenciji uvo|enjafrekvencijske regulacije u pogone velike snage i srednjegnapona. Varijacijom brzine obrtanja se kod pogona saasinhronim motorom nazivnih napona od 2300 do 6600Vmogu posti}i znatne u{tede energije, pobolj{ati kvalitetprocesa i umanjiti potreba za odr`avanjem. Tradicionalnoprimenjivana topologija pogonskog konvertora sadr`itiristorski mre`om vo|eni ispravlja~, strujno me|ukolo saprigu{nicom i strujni invertor. Komutacija je kod strujnoginvertora koji napaja asinhroni motor obezbe|enaugradnjom komutacionih kondenzatora. Kod napajanjavelikih sinhronih motora srednjeg napona, komutacija semo`e obezbediti uve}anjem pobudne struje ~ime seobezbe|uje prednja~enje struje u odnosu na napon iprirodna komutacija. Ova topologija je uspe{noprimenjivana decenijama. Glavni razlog za njenu duguprimenu je taj {to nisu postojali brzi poluprovodni~kiprekida~i snage sa mogu}no{}u kontrolisanog isklju~enja zanapone preko 1000V i struje preko 500A, tako da nije

postojala mogu}nost za primenu naponskih invertora same|ukolom naponskog tipa. Gradnja visokonaponskihprekida~a povezivanjem vi{e IGBT tranzistora na red [177]zahteva preduzimanje naro~itih mera za ravnomernuraspodelu napona u stacionarnom stanju i u toku prelaznihprocesa, pa je prakti~na primena ovakvih hibridnihprekida~a skop~ana sa pote{ko}ama.
Slika 3.3.3: Jedna faza vi{enivoskog invertora za napajanjemotora za naizmeni~nu struju srednjeg naponskog nivoa.
Slika 3.3.4: Raspolo`ivi vektori izlaznog napona trofaznogvi{enivoskog pretvara~a za motore srednjih napona. U
svakoj fazi postoje tri diskretne vrednosti (-E, 0, +E) pa jebroj vektora 19 (konvencionalni invertor mo`e dati 7
razli~itih naponskih vektora).
Izrada kontrolisanih poluprovodni~kih prekida~a zasnage konverzije od preko 1MW [195] skorijeg je datuma.Visokonaponski GTO i IGBT prekida~i omogu}uju gradnjunaponskih invertora sa naponom me|ukola od nekolikohiljada volti. Dozvoljena komutaciona u~estanost je kodovakvih invertora relativno mala (< 1 kHz) pa se u ciljuumanjenja strmine napona i valovitosti struje motoraprimenjuju topologije sa neutralnom ta~kom i vi{enivoskiinvertori [231]. Vi{enivoski invertori zahtevaju razvoj iprimenu novih tehnika {irinske modulacije. Niskakomutaciona u~estanost mo`e prouzrokovati ‘izbijanja’,
pojavu sporopromenljivih harmonijskih komponenti napona,struje i momenta ~ija je u~estanost jednaka udaljenostibliskih komponenti u spektru napona i struje. U ovakvimslu~ajevima neophodno je algoritam {irinske modulacijemodifikovati tako da se umanji rizik ‘izbijanja’ (beatharmonics) [162]. Problem sporopromenljivih harmonijskihkomponenti pogotovu je izra`en kod konvertora saredukovanim pasivnim komponentama u me|ukolu, gde doizbijanja mo`e do}i i usled interakcije ispravlja~a (front-endkonvertora) i invertora. Re{enje problema nalazi se uuve}anju u~estanosti komutacije, za {ta je neophodnona~initi poluprovodni~ke komponente boljih performansi.
3.4. UTICAJ TEHNOLOGIJE POLUPROVODNI~KIH PREKIDA~A SNAGE NA RAZVOJ UPRAVLJANIH ELEKTRI~NIH POGONA
Projektovanje i realizacija poluprovodni~kihprekida~a za velike snage ote`ano je opre~nim zahtevima zavelikim strujnim kapacitetom, dobrom naponkomizolacijom i malim toplotnim otporom. Prekida~i za naponei struje od preko 1000V i 1000A mogu u nominalnomre`imu rada imati gubitke od 1-5 kW. Potrebno je prekida~realizovati i ugraditi tako da termi~ki otpor izme|upoluprovodni~kog spoja i okoline bude {to manji, kako biradna temperatura spoja bila u dozvoljenim granicama.Potrebno je obezbediti i relativno veliki popre~ni presekprovodnika koji prekida~ vezuju u kolo. Zbog potrebneizolacije, put odvo|enja struje i put za odvo|enje toplotemoraju biti razdvojeni, {to znatno ote`ava gradnju prekida~ai konvertora. U oblasti velikih snaga naj~e{}u primenuimaju GTO tiristori. Tiristor CSG3003-45 (ABB) na~injenje za napon od 4.5 kV i struju od 3 kA i sa uspehom sekoristi u realizaciji vu~nih konvertora velike snage.
Ograni~enje {ire primene GTO prekida~a jerelativno niska u~estanost komutacija i veoma kompleksnokolo kontrolu stanja prekida~a. Isklju~enje ovog tiristoraiziskuje negativnu vrednost struje gejta u iznosu od 25%-35% anodne struje, {to ote`ava gradnju i umanjujepouzdanost. MCT (Mos Controlled Thyristor) je novipoluprovodni~ki prekida~ koji se mo`e ekvivalentirati~etvoroslojnom strukturom (SCR) sa dva dodatna MOSkontrolisana otpornika za uklju~enje i isklju~enje. MOS -koncipirano upravljanje ~ini MCT prekida~ naponskikontrolisanim, pa su potrebna upravlja~ka kola jednostavnai disipiraju zanemarivo malu snagu. Kontrolisani otpornikza uklju~enje spaja anodu isklju~enog MC tiristora sagejtom, ~ime se inicira proces kumulativnog prelaska uprovodno stanje. Nakon inicijalnog impulsa, prelaznapojava uklju~enja u velikoj meri odgovara iklju~enjukonvencionalnog tiristora. Kada je MC tiristor u stanjuprovo|enja, elektroda gejta unutra{njeg tiristora je napozitivnom malom potencijalu. Kontrolisani otpornik zaisklju~enje je zapravo MOSFET tranzistor na~injen zaizuzetno nizak probojni napon, pa mu je otpornost (RDS ∼U2.5) izuzetno mala. Aktiviranjem ovog tranzistora gejtunutra{njeg tiristora dovodi se u kratak spoj, {to prouzrokujeuspostavljanje velikih struja negativnog predznaka,dovoljnih da brzo evakui{u manjinske nosioce iz sredi{njihoblasti ~etvoroslojne strukture i isklju~e prekida~.Dozvoljena gustina struje kod MCT prekida~a je oko 30A/mm2, pa su prvi prototipi za struje od 70A na~injeni uveoma malom TO220 ku}i{tu.
Relativno nov, prekida~ je jo{ uvek nedovoljnoispitan. Prvi rezultati pokazuju da se mo`e o~ekivati veoma

mali pad napona u stanju provo|enja (< 1.5V) i znatnomanji gubici snage nego kod dosada{njih prekida~a.Francuska laboratorija ESIM-IMT izvr{ila je paralelanaispitivanja trofaznih pogonskih konvertora sa IGBT i MCTtranzstorima pod jednakim uslovima, nalaze}i da MCTkomponenta garantuje pobolj{anje efikasnosti za vi{e od 2%u svim radnim re`imima. Ispitivanja eksperimentalnihjedinica za veliki radni napon (2 kV i vi{e) ukazuju da jeMCT znatno prikladniji od IGBT prekida~a u gradnjielektrovu~nih konvertora i konvertora u elektri~nimpogonima srednje snage. Harris Semiconductor prvizapo~inje serijsku izradu MCT prekida~a za napone od1000V i struje od 85A, za koji proizvodi i upravlja~ko koloHIP 2030 koje TTL upravlja~ke signale digitalnogpogonskog kontrolera uobli~ava u signale pogodne zaupravljanje MCT prekida~em. Pozitivni rezultati dobijeni susa P-kanalnim MCT prekida~em, dok su se prvi N-kanalniuzorci pokazali neupotrebljivim. Pad napona N-kanalnogMCT prekida~a u stanju provo|enja manji je nego kod P-kanalne komponente, ali je sposobnost isklju~enja znatnoumanjena: N-kanalni MCT mo`e prekinuti jedino strujemanje od 25-30% nazivne struje, pa mo`e na}i prakti~nuprimenu jedino u zero-current-switching topologijama.
Prekida~ka svojstva P-kanalne komponente suzadovoljavaju}a u normalnim radnim re`imima, alikontrolisano isklju~enje mo`e biti problemati~no kodhavarijskih stanja kao {to je direktan kratak spoj.Konvencionalni prekida~i (IGBT, FET, BJT) pri direktnomkratkom spoju provode struje 5-10 puta ve}e od nazivnih,dok se napon na prekida~u usled desaturacije uve}ava i~esto izjedna~ava sa naponom jednosmernog me|ukola
konvertora. O~uvanje integriteta komponente zahteva da setrajanje ovakvog stanja ograni~i na 10-15 µs. Svo|enjemnapona na upravlja~koj elektrodi IGBT i FET prekida~a nanulu struja kratkog spoja se veoma brzo elimini{e a prekida~dovodi u zako~eno stanje. Kako je MCT prekida~~etvoroslojna struktura, po pona{anju sli~na tiristoru,isklju~enje havarijskih struja je ote`ano ~injenicom dauve}anje anodne struje pove}ava naelektrisanja u sredi{njimslojevima strukture. Kako isklju~enje MCT prekida~azahteva evakuaciju nosioca iz ovih slojeva, prekidanje strujeje kod kratkog spoja ote`ano, postoji rizik da budeneuspe{no i da do|e do razaranja prekida~a.
Nedostatak MCT prekida~a je i taj {to nije mogu}eoblikom i amplitudom upravlja~kih signala uticati nadinamiku uklju~enja i isklju~enja prekida~a. Kodkonvencionalnih (IGBT) prekida~a brzina uklju~enja iisklju~enja se mo`e menjati izborom karakteristikaupravlja~kog kola. Kako je MCT po prirodi tiristor, u faziuklju~enja aktivira se unutra{nja kontura povratne spregekru`nog poja~anja ve}eg od 1, koja prekida~ nakonkumulativno dovodi u provodno stanje. Upravlja~ki impulsna gejtu MCT slu`i za iniciranje ovog procesa, ali ne mo`euticati na njegovu brzinu, koja je ~esto prevelika (snap-on) iuzrok je uve}anim elektromagnetnim smetnjama. MCTprekida~ se dalje usavr{ava kako bi se pomenuti nedostaciotklonili. Paralelno sa ovim usavr{avanjem, ispituju se idrugi poluprovodni~ki prekida~i za velike snage; u faziprototipa su IGCT prekida~i koji objedinjuju dobre osobineIGBT i MCT komponenti i trebaju da omogu}e gradnjupogonskih konvertora snage do 5 MW.
Slika 3.4.1: Na~in izrade i ekvivalentna {ema MCT prekida~a.
Pogonski konvertori za snage do 300 kW i naponeme|ukola do 1000V standardno se izvode sa IGBTmodulima za naponske nivoe 600V ili 1200V. Razvoj ovihprekida~a kroz ~etiri generacije u proteklih deset godinaomogu}io je da savremeni IGBT u provodnom stanju ima
pad napona od 1.8-2V, dok prelazak iz provodnog uneprovodno stanje obavlja u vremenu od 200-500 ns.Godi{nji rast proizvodnje IGBT prekida~a je oko 37% (IMS-Intex Management Services, U.K.) prvenstveno zahvaljuju}injihovoj primeni u automobilima i ku}nim aparatima.

Primene poluprovodni~kih prekida~a u elektri~nimpogonima imaju znatno manji godi{nji rast; prema agencijiIMS, godi{nji rast proizvodnje frekvencijski regulisanihpogona }e do 2000. godine biti umanjen na 6%, kaorezultat skromnijih ulaganja u nove proizvodne kapacitete.
Primena konvertora u pogonima op{te namene,ku}nim aparatima i automobilima zahteva umanjenje cenepoluprovodni~kih modula. Integracija poluprovodnika snagesa upravlja~ko-za{titnom kolima (driver) omogu}ujerealizaciju kompaktnih i ekonomi~nih konvertora.Mitsubishi me|u prvima razvija IPM (Intelligent PowerModule) modul. U okviru jednog modula objedinjen jeispravlja~, invertor, ure|aj za ko~enje kao i sva signalna iupravlja~ka kola potrebna za upravljanje stanjem prekida~ai njihovu za{titu. Kori{}enje IPM modula i digitalnogpogonskog kontrolera sa integrisanim periferijskimure|ajuma [22] omogu}uje da se pogonski sistem na~ini saveoma malim brojem komponenti. Mitsubishi raspola`eIPM modulima za struje do 600A i napone do 1200V,adekvatne za realizaciju veoma kompaktnih pogona saasinhronim motoromima snaga do 150 kW. Moduli suna~injeni za komutacione u~estanosti od 5 do 15 kHz,poseduju ugra|ene senzore struje i temperature, pa ugradnjaeksternih dava~a nije potrebna. Za radne temperature do125 oC, napon na prekida~ima u stanju provo|enja kre}e seod 1.8 do 2V.
Slika 3.4.2: Integracija poluprovodni~kih prekida~a zavelike struje i napone sa logi~kim i analognim kolima za
obavljanje funkcija upravljanja i za{tite.
Velika gustina snage (t.j. relativno male dimenzijeIPM modula) ote`avaju odvo|enje toplote, pa su prveprimene ovih modula pra}ene ~estim otkazima, {to jeusporilo razvoj i predupredilo {iru primenu. IPM nijemonolitna struktura ve} se sastoji od vi{e me|usobnopovezanih poluprovodni~kih ~ipova. Komponente snage iupravlja~ka kola su ugra|eni u isti modul ali su fizi~kirazdvojeni. Nedovoljna elektri~na i termi~ka se negativnoodra`ava na performanse, pa se te`i izradi upravlja~kih kolai kola snage u okviru jednog monolitnog bloka. Podnazivom Smart-Power raspolo`ive su poluprovodni~kekomponente u kojima jedan ~ip sadr`i tranzistore snage,diode, upravlja~ka kola kao i neophodne logi~ke sklopovepotrebne za komunikaciju, za{titu i dijagnostiku.Jednovremena izrada komponenti za visoki napon salogi~kom CMOS kolima tra`i modifikaciju postoje}ihprocesa za izradu integrisanih kola. Razvoj novih procesazahteva velike investicije i tesnu saradnju izme|uproizvo|a~a i korisnika, pa su prve primene monolitnihinteligentnih modula bile rezervisane za velike korporacije[27] i velike serije. Danas su raspolo`ivi Smart-Powermoduli op{te namene u kojima se mogu na}i MOSFETtranzistori snage za napone do 700V, standardna CMOSlogi~ka kola napajanja 15V, bipolarna kola i operacionipoja~ava~i. Proces izrade je zasnovan na 3µm geometriji ioptimiziran tako da uklju~uje samo 10 maski. Ovim je cenaSmart-Power komponenti umanjena ~ime je otvoren putnjihovoj {iroj primeni.
Slika 3.4.3: Realizacija ekonomi~nog pogona na bazi Smart-power modula, kompaktnog pogonskog kontrolera i sensorlesspristupa upravljanju brzinom, fluksom i momentom.
Uve}anje brzine rada savremenih IGBT i MOSFETprekida~a snage omogu}uje dostizanje komutacionihu~estanosti izvan ~ujnog opsega. Prekida~ke karakteristikepoluprovodni~kih dioda nisu pratile ovaj trend. Daljeuve}anje komutacione u~estanosti konvertora ograni~eno je
poglavito nepovoljnim prekida~kim karakteristikama dioda.U okviru trofaznog pogonskog konvertora, u diode provodeu intervalima kada fazna struja i izlazni napon imajusuprotan znak. Uklju~enjem komplementarnog tranzistorazapo~inje proces komutacije u kome se struja diode naglo

prekida (snap-off). Nagla promena diode struje predstavljajedan od glavnih izvora elektromagnetnih smetnji kojeemituje konvertor. ^esto se uklju~enje komplementarnogIGBT tranzistora usporava kako bi provedene i zra~enesmetnje snap-off komutacije diode bile ubla`ene.Proizvo|a~i poluprovodni~kih komponenti ula`u znatnenapore u izradu brzih dioda za velike struje sa manjomstrminom struje pri komutaciji (soft-switching). Istra`iva~ikompanije GAD Semiconductors Ltd, Izrael, na~inili susna`ne diode sa PiN strukturom na bazi GaAs. Ove diodepodnose napone od 1500V, imaju trr (reverse recoverytime) od 35 ns i mogu ispravno raditi do temperatura od260oC. Prednost GaAS-PiN dioda je i veoma mala struja priinverznoj polarizaciji (< 100 µA).
Nema~ka kompanija Semikron posti`e daljapobolj{anja prekida~kih karakteristika sna`nih dioda. CAL(Controlled Axial Lifetime) tehnologija bazira se napreciznoj implantaciji jona helijuma, ~ime se mogu posti}ilokalne varijacije srednjeg vremena `ivota nosioca i takoostvariti puna kontrola nad procesom isklju~enja diode.Velika energija (10 MeV) potrebna za implantaciju jenestandardna pa je proces za sada skup, ali se zato kodizrade diode mo`e posti}i veoma dobar kompromis izme|upada napona u stanju vo|enja i prekida~kih karakteristika.CAL diode se koriste sa NPT (Non-punch through) IGBTtranzistorima u okviru Semikron-ovih Skiip modula. Skiipmodule je na PCIM konferenciji 1995. najavio Dejan[rajber, vode}i in`enjer kompanije Semikron. Upotreba ovihmodula se neprekidano uve}ava i svojevrstan je ‘evropski’odgovor na veoma o{tru konkurenciju proizvo|a~apoluprovodni~kih komponenti sa dalekog istoka.
Karakteristike i cene postoje}ih poluprovodni~kihprekida~a ne omogu}uju uspe{nu primenu frekvencijskiregulisanih pogona u proizvodima {iroke potro{nje, ku}nimaparatima, automobilima i drugim slu~ajevima masovneprimene. Osnovi nedostaci postoje}e tehnologije su visoknivo elektromagnetnih smetnji, veliki gubici snage i (presvega) visoka cena. Tr`i{te dozvoljava upotrebu regulisanihpogona (snage 1HP) u ve{ ma{inama i usisiva~ima (Frost &Sullivan) ukoliko je proizvodna cena pogona manja od $15.Da bi se ovo postiglo, potrebno je da se proces proizvodnjepoluprovodni~kih komponenti u~ini jevtinijim, da se svepoluprovodni~ke naprave integri{u u jednom ~ipu i daproblem odvo|enja toplote i ku}i{ta bude re{en na napredani ekonomi~an na~in. Prema procenama, navedeni uslovi sedo 2001. godine mogu zadovoljiti daljim razvojempostoje}e Smart-Power tehnologije.
3.5 PROBLEMI AKUSTI~NE BUKE
Elektri~ni pogoni emituju, pored elektromagnetnihi akusti~na zaga|enja. Fundamentalne i u~estanosti {irinskemodulacije veoma ~esto pripadaju ~ujnom opsegu.Slo`enoperiodi~na promena struja u namotajima motora,prigu{nica i transformatora prouzrokuje istu takvu promenufluksa i magnetne indukcije u magnetnim kolima ilimovima. Zahvaljuju}i magnetostrikciji, oscilacije fluksaprouzrokuju vibraciju limova i stvaranje buke. Jedan odizvora buke mo`e biti i mehani~ki podsistem pogona.Pobu|en parazitnim komponentama elektromagnetnogmomenta (valovitost momenta – ripple), mehani~kipodsistem mo`e oscilovati na u~estanosti ovih ne`eljenihkomponenti i emitovati buku.
Noguchi [175] se bavi problemima upravljanjaasinhronim motorom i predla`e originalan pristup zaumanjenje akusti~ne buke. On uo~ava da je u~estanostkomutacija u strukturi za direktno upravljanje momentom(DTC-Direct Torque Control) ograni~ena ka{njenjem ulinijama sa preno{enje upravlja~kih signala tranzistorimasnage kao i prisustvom parazitnog histerezisa. On predla`edodavanje visokofrekventnog nosioca na ulaz DTCkomparatora i pokazuje da se na ovaj na~in subjektivniose}aj buke vidno umanjuje. Wallace [219] i Mutoh [220]pokazuju da se kod servo pogona sa vektorski kontrolisanimasinhronim motorom buka mo`e umanjiti delovanjem nadigitalni modulator i uobli~avanjem spektra statorskihstruja. Akusti~na buka je jedna od najve}ih prepreka {irojprimeni SR motora u ku}nim i aparatima {iroke potro{nje.Glavni izvor buke kod ovih motora je radijalna deformacijastatora [199] usled njegove interakcije sa rotorom. Buka semo`e umanjiti dodavanjem pseudo-slu~ajne binarnesekvence (PRBS) male amplitude u upravlja~ke signale ilimalim slu~ajnim pomeranjem paketa impulsa u vremenu.Ovakvim akcijama se izbegava koncentrisanje spektralneenergije na jednoj u~estanosti, ~ime je umanjen rizikpobu|ivanja slabo prigu{enih sopstvenih u~estanostimehani~kog podsistema pogona, koje buku mogu znatnouve}ati. Pollock [190] predla`e da u pogonu sa SR motoromnajpre odrede sopstvene u~estanosti ststora i rotora, a potomnaponski impulsi uobli~e tako da mehani~kim rezonatorimane saop{tavaju energiju. Husain [196] uspeva da bukugenerisanu od strane mehani~kog podsistema vidno umanjiprimenom naro{itog algoritma za {irinsku modulaciju iumanjenjem valovitosti momenta.
ULAZNI FILTER ISPRAVLJA^
Pγ
Pγ
INVERTOR
di/dt
C du/dt
M
TOPLOTNO ZRA^ENJE USLED GUBITAKA PRI KONVERZIJI
STRUJE KROZPARAZITNEKAPACITIVNOSTI
GUBICIU MOTORU
BUKA
ELEKTROMAGNETNOZRA^ENJE
KONDUKCIONESMETNJE
Slika 3.5.1: Elektromagnetno, zvu~no i toplotno zaga|enje koje emituje elektri~ni pogon.

3.6 SAVREMENI MOTORI ZA NAIZMENI~NU STRUJU U POGONIMA OP{TE NAMENE
Asinhroni motori na~injeni za rad sa konstantnom,mre`nom u~estano{}u napajanja optimizirani su tako dapolazni i prevalni moment budu {to ve}i, dok se te`i dapolazna struja i gubici u nominalnom re`imu rada budu {tomanji. ^esto ispunjenje ovih zahteva tra`i specijalni oblikrotorskog `leba ili ugradnju dvostrukog kaveza. Motorina~injeni za mre`no napajanje nisu adekvatni za primenu ufrekvencijski regulisanim pogonima promenljive brzine. Zaprimene u pogonima promenljive brzine proizvode semotori optimizirani tako da imaju {to manje gubitke urotoru i {iroku oblast rada sa konstantnom snagom. ^esto serealizuju sa otvorenim ili poluotvorenim rotorskim `lebomkako bi se umanjila induktivnost rasipanja i uve}ao odnosmaksimalne i nominalne brzine, kao i odnos prevalnog inazivnog momenta. U gradnji asinhronih motora velikesnage predvi|enih za rad sa strujnim napajanjem (CSI), te`ise da induktivnost rasipanja bude {to manja. Kod motoranapajanih iz naponskih konvertora (VSI), valovitost struje(ripple) je obrnuto proporcionalna induktivnosti rasipanja,pa za ovu induktivnost postoji minimalna dopu{tenavrednost (oko 0.1 r.j.). Prevalni moment i maksimalnabrzina pogona sa asinhronim motorom su tako|e obrnutosrazmerni rasipnoj induktivnosti, {to favorizuje izbor ni`ihvrednosti induktivnosti u fazi projektovanja i primenuotvorenih oblika rotorskog `leba. Opre~ni zahtevi po pitanjuizbora Lγ re{avaju se uve}avanjem u~estanosti komutacija upogonskom konvertoru. Komutacione u~estanosti od 15-20kHz omogu}uju upotrebu motora sa induktivno{}u Lγmanjom od 0.08 r.j. uz prihvatljive vrednosti valovitostistruje.
Frekvencijski regulisani asinhroni motori naj~e{}eposeduju sopstveno hla|enje. O oblasti malih brzina, uslovihla|enja su pogor{ani pa je dozvoljeno trajno optere}enjemanje. U trajnom radu pri brzini od 10% nazivne ne sme seprevazi}i optere}enje ve}e od 60-65% nazivnog. Pri porastubrzine dozvoljeno optere}enje raste (75% MNOM pri 20%nNOM, 90% MNOM pri 40% nNOM). Iz pomenutih razloga te`i seda ukupni gubici u motoru budu {to manji, pri ~emu senaro~ita pa`nja posve}uje umanjenju gubitaka u rotoru. Uindustriji hrane, lekova, vojnoj industriji i drugimprimenama gde se zahteva ~isto}a procesa u skladu sa FDAnormama primenjuju se hermetizovani (TEFC-TotalyEnclosed Fan Cooled) motori sa prinudnim hla|enjem. Kodovih motora se uslovi hla|enja ne pogor{avaju o oblastimalih brzina i nominalni moment je raspolo`iv u punomopsegu.
U postupku izrade asinhronih motora namenjenihfrekvencijskoj regulaciji ugra|uje se poja~ana izolacija naulaznim krajevima statorskog namotaja. Refleksijanaponskog talasa koji se prostire du` kabla od konvertorasnage do motora dovodi do prenapona i ubrzanog starenjaizolacije na ulaznim navojcima usled velike strminenaponskog talasa. Ova pojava je glavni razlog da `ivotnivek frekvencijski regulisanih motora bude ~etvorostrukokra}i nego vek motora napajanih iz gradske. Frekvencijskiregulisan motor proizvodi za oko 6db ve}u akusti~nu bukuod motora konstantne u~estanosti, pa se u njegovoj gradnjiposebna pa`nja posve}uje impregnaciji namotaja i limovakako bi se umanjili elektrodinami~ki i efektimagnetostrikcije.
Kod izrade asinhronih motora za servo aplikacije,naro~ita pa`nja se posve}uje merama za minimizacijuvalovitosti momenta, pa se primenjuju specifi~ni odnosibroja i {irine rotorskih i statorskih `lebova kao i kosopostavljanje (skew) `lebova u cilju minimizacije negativnihefekata o`ljebljenja. Pomenute mere za minimizacijuvalovitosti momenta redovno umanjuju efikasnost [251] imogu prouzrokovati aksijalni fluks, pa se ne praktikujenjihova primena u gradnji motora za pogone op{te namene.
Trend u gradnji frekvencijski regulisanih pogona saasinhronim motorom je integracija motora i pogonskogkonvertora u jedinstvenu celinu. Upravlja~ka kola i sekcijasnage frekvencijskog regulatora ugra|uje se u ku}i{testatora, ~iji rashladni sistem treba da obezbedi odvo|enjetoplote usled ukupnih gubitaka snage u motoru i pretvara~u.Ukupna du`ina motora se u odnosu na konvencionalnore{enje uve}ava za oko 30% (ABB-Sweden) dok je te`inaza oko 15% ve}a od te`ine konvencionalnog motora.Prednost ovakvog re{enja je veoma kratka veza izme|ukonvertora snage i motora, umanjenje emitovanihelektromagnetnih smetnji i eliminacija problema saizolacijom ulaznih namotaja motora zahvaljuju}i odsustvurefleksije naponskih talasa na kablu koji povezuje motor ipretvara~. U polju savremenih konstrukcija asinhronihmotora, intenzivan razvoj do`ivljavaju i asinhroni motori zavu~ne primene. Linearni asinhroni motor (LIM, Zhang[189]) sa polnim korakom od 0.3m i rastojanjem izme|umagnetnog kola i provodne podloge od 10mm omogu}ujekratkotrajno razvijanje vu~nih sila do 18000N {to ga ~inipogodnim za vu~ne primene u vozilima gradskogsaobra}aja.
Raspolo`ivost trofaznih konvertora snage sakontinualno promenljivom amplitudom i u~estano{}uizlaznog napona omogu}uje primenu sinhronih ireluktantnih motora u pogonima gde se zahteva ve}aefikasnost, otsustvo zagrevanja rotora, ve}a specifi~na snagaili jednostavna i robusna konstrukcija rotora. Znatniistra`iva~ki napori ula`u se u razvoj naprednih re{enjasinhronih motora za pogone op{te namene i servo primene.Sinhroni reluktantni motor sa aksijalnom laminacijom [134]poseduje stator jednak statoru asinhronog motora, dok jerotor na~injen od aksijalno slo`enih limova postavljenihtako da maksimiziraju razliku izme|u induktivnosti u d i qosama. Pogonskog konvertor i digitalni pogonski kontrolerza upravljanje sinhronim reluktantnim motorom jednaki sukao kod pogona sa asinhronim motorom. Algoritamvektorskog upravljanja se mo`e primeniti i na sinhronireluktantni motor, pa se ovaj motor ~esto primenjuje u servoaplikacijama niskih performansi u kojima je va`no posti}inisku cenu. Xiang [194] pokazuje da direktno digitalnoupravljanje sinhronim reluktantnim motorom uz digitalnurealizaciju strujne petlje omogu}uje nezavisno upravljanjefluksom i regulaciju momenta sa propusnim opsegom od1kHz. U dizajnu sinhronih reluktantnih motora za servoaplikacije preduzimaju se posebne mere (skew) [56] u svrhuminimizacije valovitosti momenta. Pored servo primena,sinhroni reluktantni motor se koristi i u pogonima malesnage gde je odsustvo pobude na rotoru njegova prednost uodnosu na sinhrone motore sa permanentnim magnetima.Primer ovakve primene je elektri~ni pogon mehanizma zaupravljanje savremenim automobilima. Uz pretpostavku dase pogon realizuje sa sinhronim PM motorom, u slu~aju

kratkog spoja na priklju~cima motora, pokretanje sinhronogPM motora je onemogu}eno jer pri kretanju indukuju strujeu statoru i razvija ko~ni moment: upravlja~ki mehanizamautomobila ostao bi blokiran. Kratak spoj na priklju~cimareluktantnog motora izbacuje iz pogona servo funkciju, alivoza~ ipak mo`e, uz ve}i napor, da obavi `eljeni otklonmehanizma za upravljanje.
Sinhroni motori sa permanentnim magnetima narotoru su naro~ito pogodni za upotrebu u pogonima veomamalih snaga. U fazi istra`ivanja su naro~ite konstrukcijesinhronog PM motora koje olak{avaju rad ovoga motora bezsenzora za detekciju polo`aja. Dr. Luciano Antognini(BIMU 97, Portescap, LA Chaux-de-Fonds, Switzerland)istra`uje ~etvorofazne i dvofazne sinhrone PM motore sanamotajima povezanim u krst i kvadrat. Naro~ita spreganamotaja omogu}uje olak{ani polazak motora u feed-forward modu kao i jednostavnu detekciju polo`aja rotora unormalnim radnim re`imima. U sprezi sa kompaktnimpogonskim konvertorima, sinhroni PM motori sunajozbiljniji kandidati za prodor u oblast pogona u ku}nimaparatima. Jedini ozbiljan nedostatak ovih motora jenemogu}nost slabljenja polja i rada iznad nazivne brzine.Ovaj problem se mo`e prevazi}i sekcionisanjem iprevezivanjem statorskog namotaja (Nipp, [186]).Savremena re{enja ogibljenja automobila uklju~uju aktivnoprigu{enje vibracija i oscilacija (Boules [191]). Sinhronimotori sa permanentnim magnetima su izuzetno pogodni zaovakve aplikacije pa se u automobilskoj industriji mo`eo~ekivati njihova {ira primena.
Za razliku od sinhronih motora sa permanentnimmagnetima ~ija je konstrukcija uglavnom definisana, zapiezoelektri~ne ultrazvu~ne motore (PUM – PiezoelectricUltrasonic Motors) se jo{ uvek tra`e optimalna re{enja. Uoblasti malih brzina, ovaj motor obezbe|uje povoljnijiodnos momenta i te`ine (specifi~ni moment) odkonvencionalnih motora sa reduktorom. Intenzivno seistra`uju mogu}nosti za primenu PUM motora [173] kaoservo aktuatora u pozicionim servomehanizmima koji nezahtevaju razvijanje velikih brzina. Pored razvoja PUMmotora, znatni napori ula`u se u razvoj minijaturnihpiezoelektri~nih aktuatora za vr{enje relativno malihkretanja alata kod izuzetno preciznih operacija obradetvrdih i krtih materijala.
3.7 PREKIDA~KI RELUKTANTNI MOTORI
Veliki broj stru~njaka za projektovanje elektri~nihma{ina radi u oblasti usavr{avanja prekida~kih reluktantnihmotora. Rad je intenziviran u poslednjem trogodi{njemperiodu, a naro~ito nakon {to je korporacija Emerson
Electric postala vlasnik SR-Drives Ltd, najve}i centar zarazvoj SR motora i pogona. O prekida~kim reluktantnimmotorima i njihovom potencijalu postoje dijametralnosuprotna mi{ljenja. Premda poznat jo{ u pro{lom veku, SRmotor pa`nju istra`iva~a privla~i tek nakon pojavetiristorskih konvertora snage. Prof. Dr Ilija Obradovi} jena~inio prve prodore u polju projektovanja SR motora. Prveprototipe motora i pretvara~a izra|uje grupa istra`iva~a podrukovodstvom prof. P.J. Lawrensona [244], koji jerealizovao ve}i broj uspe{nih primena SR motora uglavnomu elektri~noj vu~i. SR motor ne radi na principu obrtnogpolja. Stator i rotor poseduju istaknute polove, njihov broj jeparan i razli~it na statoru i rotoru, ~este kombinacije su 6/2,6/4 i 8/6. Na rotoru ne postoji namotaj, dok je statorskinamotaj skoncentrisan, {to znatno olak{ava njegovu izradu imonta`u. Konstrukcija motora je jako jednostavna iposeduje potencijal za veoma jevtinu serijsku proizvodnju.Napajanje motora mo`e biti unipolarno, pa se topologijapogonskog konvertora [26] mo`e bitno pojednostaviti.
Sposobnost za rad u uslovima visokih temperatura,primena konvencionalnih materijala, sposobnost zarazvijanje velikih brzina, specifi~na snaga ve}a za 10-20%od specifi~ne snage ma{ina za jednosmernu struju, odsustvokonture kratkog spoja u topologiji konvertora, sposobnost zarad i nakon ispada jedne od faza i mnoge druge osobine ~ineovaj motor kandidatom za primenu u ku}nim aparatima,ventilatorima, rashladnim sistemima, kao i za realizacijupomo}nih pogona u savremenim automobilima. Nastojanjada se SR motor uvede u pomenute primene [27] nisu uspelazbog velike akusti~ne buke, impulsnog karaktera momenta iubrzanog starenja prouzrokovanog lokalnim zagrevanjem(‘vru}im ta~kama’) magnetnog kola. U nastojanju da seumanji buka i valovitost momenta kod SR motora, najpre sure{avani problemi modelovanja procesa elektromehani~kekonverzije [245]. Proces konverzije se obavlja u ciklusimapa je impulsni karakter momenta inherentan i mo`e seotkloniti jedino uz naro~ito uobli~avanje impulsa faznihstruja i njihovo delimi~no preklapanje.
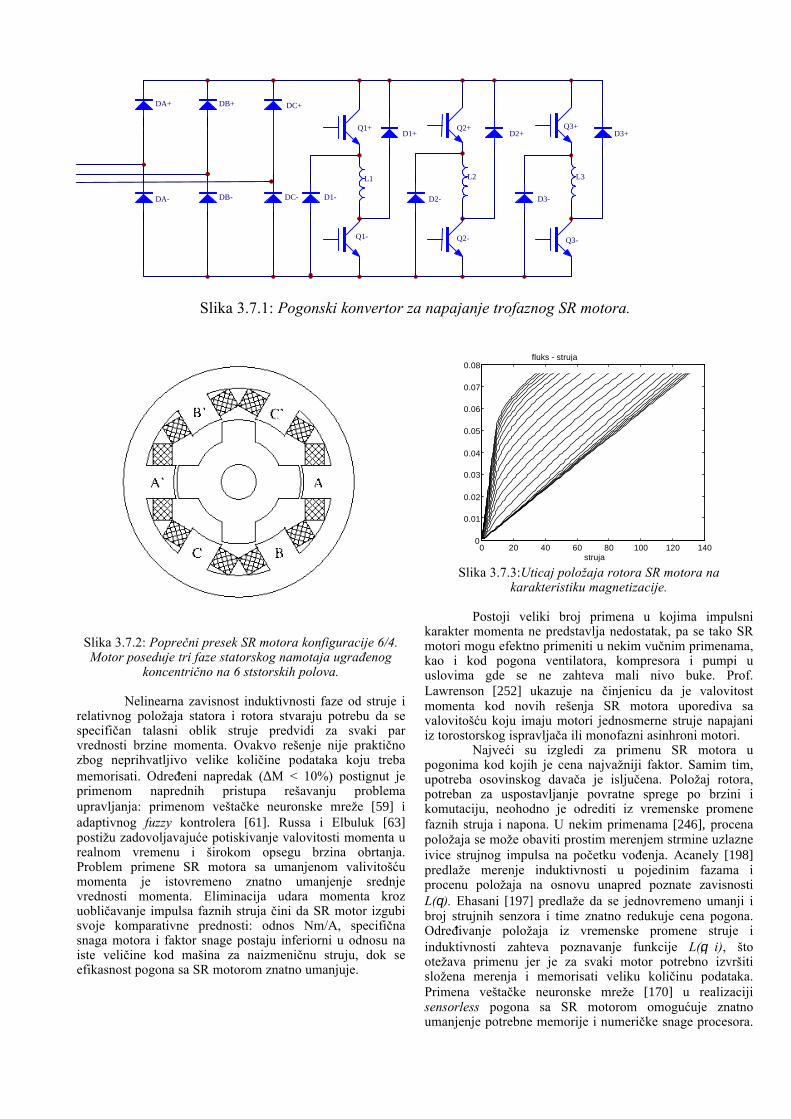
L1 L2 L3
DA+ DB+ DC+
Q1-
Q1+
D1-
D1+Q2+
Q2-
D2+Q3+
D3-
Q3-
D3+
DA- DB- DC- D2-
Slika 3.7.1: Pogonski konvertor za napajanje trofaznog SR motora.
Slika 3.7.2: Popre~ni presek SR motora konfiguracije 6/4.Motor poseduje tri faze statorskog namotaja ugra|enog
koncentri~no na 6 ststorskih polova.
Nelinearna zavisnost induktivnosti faze od struje irelativnog polo`aja statora i rotora stvaraju potrebu da sespecifi~an talasni oblik struje predvidi za svaki parvrednosti brzine momenta. Ovakvo re{enje nije prakti~nozbog neprihvatljivo velike koli~ine podataka koju trebamemorisati. Odre|eni napredak (∆M < 10%) postignut jeprimenom naprednih pristupa re{avanju problemaupravljanja: primenom ve{ta~ke neuronske mre`e [59] iadaptivnog fuzzy kontrolera [61]. Russa i Elbuluk [63]posti`u zadovoljavaju}e potiskivanje valovitosti momenta urealnom vremenu i {irokom opsegu brzina obrtanja.Problem primene SR motora sa umanjenom valivito{}umomenta je istovremeno znatno umanjenje srednjevrednosti momenta. Eliminacija udara momenta krozuobli~avanje impulsa faznih struja ~ini da SR motor izgubisvoje komparativne prednosti: odnos Nm/A, specifi~nasnaga motora i faktor snage postaju inferiorni u odnosu naiste veli~ine kod ma{ina za naizmeni~nu struju, dok seefikasnost pogona sa SR motorom znatno umanjuje.
0 20 40 60 80 100 120 1400
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08 fluks - struja
struja
Slika 3.7.3:Uticaj polo`aja rotora SR motora nakarakteristiku magnetizacije.
Postoji veliki broj primena u kojima impulsnikarakter momenta ne predstavlja nedostatak, pa se tako SRmotori mogu efektno primeniti u nekim vu~nim primenama,kao i kod pogona ventilatora, kompresora i pumpi uuslovima gde se ne zahteva mali nivo buke. Prof.Lawrenson [252] ukazuje na ~injenicu da je valovitostmomenta kod novih re{enja SR motora uporediva savalovito{}u koju imaju motori jednosmerne struje napajaniiz torostorskog ispravlja~a ili monofazni asinhroni motori.
Najve}i su izgledi za primenu SR motora upogonima kod kojih je cena najva`niji faktor. Samim tim,upotreba osovinskog dava~a je islju~ena. Polo`aj rotora,potreban za uspostavljanje povratne sprege po brzini ikomutaciju, neohodno je odrediti iz vremenske promenefaznih struja i napona. U nekim primenama [246], procenapolo`aja se mo`e obaviti prostim merenjem strmine uzlazneivice strujnog impulsa na po~etku vo|enja. Acanely [198]predla`e merenje induktivnosti u pojedinim fazama iprocenu polo`aja na osnovu unapred poznate zavisnostiL(θ). Ehasani [197] predla`e da se jednovremeno umanji ibroj strujnih senzora i time znatno redukuje cena pogona.Odre|ivanje polo`aja iz vremenske promene struje iinduktivnosti zahteva poznavanje funkcije L(θ, i), {toote`ava primenu jer je za svaki motor potrebno izvr{itislo`ena merenja i memorisati veliku koli~inu podataka.Primena ve{ta~ke neuronske mre`e [170] u realizacijisensorless pogona sa SR motorom omogu}uje znatnoumanjenje potrebne memorije i numeri~ke snage procesora.

DiRenzo [163] predla`e algoritam za indirektno odre|ivanjepolo`aja rotora SR motora koji ne zahteva poznavanjefunkcije L(θ, i). Sli~an pristup ima i Lopez [171]: trenutak ukome su statorski i rotorski polovi na samoj ivicipreklapanja lako je odrediti jer je strmina struje urelevantnoj fazi tada veoma velika. Detekcija po~etkapreklapanja je robusna i ne zahteva poznavanje parameteramotora niti funkcije L(θ, i). Obnavljanje podatka o polo`ajuse vr{i po jednom u svakom ciklusu konverzije, {to jedovoljno za stabilan rad sensorless SR pogona nakonnjegovog pokretanja u feed forward (open loop) re`imu.
Elbuluk [187] pokazuje da se SR motor mo`ekonstruisati tako da procena polo`aja rotora iz oblikaimpulsa fazne struje bude olak{ana. Broj statorskih irotorskih polova, njihova {irina kao i veli~ina i na~inpromene vazdu{nog zazora mogu biti pode{eni tako da radpogona bez senzora bude olak{an. Isti konstrukcioniparametri, me|utim, uti~u na efikasnost motora, minimalnipolazni moment u kriti~nom polo`aju i odnos Nm/A, panjihov izbor nije slobodan i mora se podrediti ukupnimperformansama pogona. Jedna od specifi~nosti SR motorakoja se ne susre}e kod drugih vrsta pogona je uskapovezanost konfiguracije i parametera motora, topologijepogonskog pretvara~a i zakona upravljanja: me|uvezaelemenata SR pogona nala`e da se postupci projektovanja ioptimizacije vr{e jednovremeno. U slu~aju da se problemakusti~ne buke i valovitosti momenta re{i na prihvatljiv iekonomi~an na~in, SR motor mo`e biti efektno primenjenna mestima gde se danas primenjuje univerzalni –kolektorski motor sa faznom regulacijom, kao i u nekimprimenama elektri~ne vu~e.
4. ZAKLJU~AK
Digitalno upravljani elektri~ni pogoni op{te namenesu u{li u zrelo doba svoje primene. Za topologiju konvertorasnage, re{enje digitalnog pogonskog kontrolera i osnovneupravlja~ke funkcije postoje op{te prihva}ena, dobro ispitanare{enja. Mogu}e je, me|utim, dati znatan doprinos ure{avanju preostalih problema i nedostataka koji ograni~avaju{iru primenu ovih pogona. Problemi za koje nemazadovoljavaju}eg re{enja su:
i) Visok nivo akusti~ne buke, toplote i elektromagnetnog zaga|enja emitovanog od strane pogonskog konvertora u okolni prostor;
ii) Relativno visoka cena i veliki broj senzora primenjenih u pogonu;
iii) Neophodnost kvalifikovanog osoblja u fazi instalacije pogona i potreba za preciznim poznavanjem velikog broja parametara motora.
Neprekidno pobolj{anje karakteristika poluprovod-ni~kih tranzistora snage i razvoj novih vrsta prekida~a (MCT,IGCT) omogu}i}e da se umanje kondukcioni gubici snage prikonverziji. Komutacioni gubici i snaga elektromagnetnihsmetnji }e se umanjiti modulacijom srednjeg vremena `ivotanosioca u poluprovodni~koj komponenti, kao i zahvaljuju}iizvesnim modifikacijama osnovne topologije konvertora. Ucilju eliminisanja negativnih posledica (du/dt) visokihu~estanosti komutacije, treba o~ekivati {iru upotrebu ne-disipativnih L-C kola za uobli~avanje promene napona prikomutaciji (snubber) kao i topologija sa rezonantnim i kvazi-rezonantnim me|ukolom. Mogu}a je i pojava originalnihtopologija pogonskog konvertora koje bi omogu}ile
komutaciju pri nultoj vrednosti napona ili struje uzjednovremeno uva`avanje zahteva napajanja i upravljanjamotorom. Problemi komutacije su naro~ito izra`eni kodpogonskih konvertora velike snage i srednjeg napona, pa semo`e o~ekivati da topologija ovih konvertora u bliskojbudu}nosti pretrpi najve}e izmene.
Strogi zahtevi u pogledu elektromagnetnekompatibilnosti prouzrokova}e izmenu u topologiji ulaznogdela pogonskog konvertora (front-end converter). Dosadakori{}eni diodni ispravlja~ ne omogu}ava rekuperaciju iprouzrokuje znatna izobli~enja ulazne struje. Primenu moguna}i ne-rekuperativne PFC (Power Factor Correction)topologije [221] dok se u daljoj budu}nosti (i nakon znatnijegumanjenja cene poluprovodni~kih komponenti) mo`eo~ekivati primena sinhronih ispravlja~a sa rekuperacijom ikorekcijom faktora snage. U tom slu~aju topologijapogonskog konvertora }e biti simetri~na i uklju~ivati dvaidenti~na trofazna prekida~ka mosta sa ukupno 12prekida~kih tranzistora (Motor converter i front-endconverter) koji }e biti povezani na zajedni~ko me|ukolonaponskog tipa, dok }e im priklju~ci za naizmeni~nu strujubiti povezani sa motorom i napojnom mre`om. Veliki stepenupravljivosti bi jednovremeno omogu}io regulaciju statorskihstruja, uobli~avanje ulazne struje i minimizaciju pasivnihkomponenti i energije akumulirane u me|ukolu.
U narednim godinama treba o~ekivati da pogoniop{te namene budu realizovani tako da se pogonskikonvertor sa pripadaju}im upravlja~kim sklopovimaugra|uje u ku}i{te samog motora. Prednosti integrisanogpogona bi}e jednostavna instalacija i zamena, mogu}nostoptimalnog prilago|enja topologije konvertora, senzora ialgoritama upravljanja tipu i vrsti motora, kao i u{tede zbogeliminacije jednog ku}i{ta i znatnog broja kablova i veza.Provodnici koji povezuju motor i konvertor }e bitizanemarive du`ine, pa }e glavni izvor elektromagnetnihsmetnji biti otklonjen. Kratka veza motor-konvertor }e uvelikoj meri re{iti i problem proboja izolacije na ulaznimnavojcima statorskog namotaja motora. Do proboja dolazikod motora napajanih iz savremenih pogonskih konvertorasa velikom strminom (dV/dt) izlaznog napona. Direktnopovezivanje motora i konvertora }e eliminisati refleksijenaponskog talasa i onemogu}iti umnogostru~avanjeamplitude, ~ime }e problem ubrzanog starenja i probojaizolacije biti eliminisan. Integracija motora i pretvara~a }ezahtevati re{avanje slo`enih problema prostiranja toplote,hla|enja, umanjenja ukupnih gubitaka, i radapoluprovodni~kih naprava na povi{enim temperaturama, alise mo`e o~ekivati da prednosti integrisanog pogona dovedudo njegovog uvo|enja u primenu u skoroj budu}nosti.
Savremeni frekvencijski regulisani pogoni op{tenamene primenjuju algoritme skalarnog upravljanja ili radebez povratne sprege. U budu}nosti treba o~ekivati primenuvektorskog upravljanja i kod ovih pogona. U regulaciji brzinepumpi, kompresora i ventilatora brzina i ta~nost odziva imajusekundarni zna~aj, ali se javlja potreba za razvijanjem {tove}eg polaznog momenta i zahtev za prilago|enjemamplitude fluksa optere}enju u cilju minimizacije gubitaka.Iz pomenutih razloga, U/f regulacija se sve ~e{}e zamenjujealgoritmom vektorskog upravljanja, ~ija implementacijazahteva poznavanje inicijalnih parametara motora i pra}enjenjihove promene u toku rada pogona. Parametri motora nisuunapred poznati ve} se unose nakon ugradnje, {toonemogu}ava instalaciju od strane nekvalifikovanog osoblja.Razvoj algoritama i postupaka automatizovanog odre|ivanjaparametara motora u fazi instalacije (self-commissioning)

treba da omogu}i pouzdano samo-pode{avanje pogona iumanji potrebu za stru~nim osobljem. O~ekuje se razvojre{enja koje }e pri prvom uklju~enju digitalnog regulatoraomogu}iti automatizovano prepoznavanje vrste i tipa motorai senzora koji su priklju~eni, odrediti parametre motora imehani~kog podsistema, prepoznati aplikaciju i dosti}ispremnosti za rad bez u~e{}a operatora. Ova vrsta plug-and-play funkcionalnosti }e biti naro~ito va`na kod primena kojezahtevaju da se pauze usled kvara (down-time) minimiziraju.Po zameni modula koji je otkazao ispravnim, automatskokonfigurisanje i pode{avanje novog modula obezbedi}e brzodostizanje spremnosti za rad. Pored razvoja algoritama ipostupaka za identifikaciju inicijalnih vrednosti parametara,treba o~ekivati i razvoj novih pristupa odre|ivanjuparametara i stanja motora u toku rada. Zbog zahteva zaumanjenjem broja senzora, ovi pristupi }e biti oslonjeni naizdvajanje informacija iz terminalnih napona i struja i sve~e{}e }e se bazirati na sekundarnim efektima kao {to jepojava `lebnih harmonika, uticaj lokalnog zasi}enja natranzijentnu impedansu, pojava unifaznih komponenti uspektru i mnogi drugi.
Postoje}a re{enja direktnog vektorskog upravljanjase ne mogu primeniti u oblasti malih brzina obrtanja. Velikibroj pogona op{te namene ne poseduje dava~ brzine ali trebada obezbedi kontinualnu regulaciju momenta i fluksa uoblasti veoma malih brzina. Treba o~ekivati razvoj novihpristupa sensorless upravljanju asinhronim i sinhronimmotorima koji trebaju da obezbede stabilan rad pri brzinamamanjim od 1% nazivne. Potrebna su re{enja koja }eobezbediti raspregnuto upravljanje momentom i fluksom pribrzinama bliskim nuli uprkos varijacijama otpornosti RS,uticaju mrtvog vremena, pada napona na poluprovodni~kimprekida~ima, {uma i ofseta. Treba o~ekivati i razvojalgoritama upravljanja koji }e obezbediti rekonstrukcijufaznih struja iz struje me|ukola, i time omogu}iti umanjenjebroja dava~a struje. Savremeni strujni transformatori sakompenzacijom jednosmerne komponente fluksa mogu ubudu}nosti biti zamenjeni kompaktnim integrisanim kolimaza galvanski izolovan, kvalitetan prenos signala struje. Ve}je raspolo`iv (HP) sinhronizovani sigma-delta modulatorHCPL7800 sa AlGaAs foto elementima koji omogu}ujeizolovan prenos signala statorske struje sa propusnomopsegom od 100kHz, {to zadovoljava potrebe za{tite iregulacije struje. Treba o~ekivati dalji razvoj strujnihsenzora, kao i pojavu kompaktnih pogonskih senzora napona,brzine, polo`aja i temperature.
Trend decentralizacije u upravljanju procesimaodrazi}e se na razvoj frekvencijski regulisanih pogona op{tenamene. U okviru pogonskog kontrolera bi}e locirane PLCfunkcije, elementi inteligencije i u njemu }e se sticati svepovratne sprege, dok }e centralni ra~unar obavljatiisklju~ivo funkcije iniciranja i nadzora. Povezivanjefrekvencijskih regulatora i centralnog ra~unara }e bitistandardizovano. Brzina prenosa i kvalitet izolovanosti(PELV – Protective Extra Low Voltage) se mogu nazreti izpostoje}eg nacrta standarda VDE106/160.
Elektri~ni pogoni visokih performansi i servopogoni za kontolu kretanja se nalaze u relativnoj stagnaciji.Raznolikost senzora (rizolver, enkoder, kom-koder, hall-effect), motora (indukcioni, sinhroni, MJSS), kao i odsustvostandarda za njihovo povezivanje i standarda digitalnekomunikacije ~ini svaki sistem specifi~nim, pa je razmenahardverskim modula, programskih paketa, re{enja iiskustava izme|u razli~itih proizvodnih ma{ina nemogu}a idalji razvoj oblasti usporen. Veliki broj razli~itih,
me|usobno nekompatibilnih upravlja~kih struktura(analogna i digitalna realizacija strujnog regulatora,kaskadne strukture, dislocirani pozicioni regulator itd.)zahteva od korisnika da kompletan sistem preuzme odjednog isporu~ioca i da za svaki element sistema posedujerezervni modul (100% razerva).
U narednim godinama treba o~ekiva sazrevanjeure|aja za upravljanje kretanjem. Prakti~no }e bitiprimenjen koncept modularnosti: delovi sistema kaopogonski konvertor, pomo}na napajanja, digitalni pogonskikontroler, servo motor, dava~ polo`aja ili moduli zaprilago|enje }e biti koncipirani, projektovani i proizvedenitako da se mogu me|usobno povezivati i proizvoljnokombinovati. Otvorena arhitektura treba da omogu}i dakomponente sistema budu unificirane, ~ime }e se umanjitinjihova cena, smanjiti potrebne rezerve i zalihe modula,olak{ati povezivanje i zamena i uve}ati pouzdanost. Naprimer, pogonski konvertor sa pripadaju}im sklopovimabi}e realizovan tako da se preko logi~kih ulaza mo`edirektno upravljati stanjem prekida~a. Povezivanjem saodgovaraju}im digitalnim pogonskim kontrolerom, istikonvertor mo`e postati izvr{ni organ open-loop U/f pogona,pogona sa sinhronim motorom, vektorski kontrolisanogservo pogona ili sensorless pogona sa reluktantnimmotorom.
Otvorena arhitektura sistema za upravljanjekretanjem }e biti pra}ena odgovaraju}im razvojemupravlja~kih i komunikacionih algoritama i programa.‘Inteligentni’ pogon }e biti sposoban da samostalno i)Odredi konfiguraciju, strukturu i model sistema, procesa imotora; ii) Identifikuje i kalibri{e senzore; iii) Odrediinicijalne parametre; iv) Inicira i izvede neophodne testove,analizira odzive i izvr{i pode{enja; v) Defini{e ili preuzmeunapred definisane kriterijeme performanse; vi) Odredistrukturu i parametre regulacije; vii) Vr{i identifikacijuparametera u toku rada i sprovodi relevantne korektivneakcije.
Neophodnost uve}anja brzine i preciznosti radaservomehanizama stvori}e potrebu da se propusni opseg iu~estanost odabiranja pozicionih regulatora uve}aju preko100Hz i 2 kHz. Treba o~ekivati da propusni opseg brzinskihservomehanizama dostigne 200-300Hz uz u~estanostiodabiranja od 3 do 5 kHz. Br`i odziv kod upravljanjabrzinom i pozicijom ~ini neophodnim pobolj{anjeperformansi regulatora momenta i struje. Pojavi}e sepotreba da propusni opseg regulatora statorske strujedostigne 2 kHz dok }e prakti~ne vrednosti u~estanostiodabiranja biti 20-30 kHz. Potreba za implementacijomslo`enih struktura pogonskih regulatora sa veoma kratkim(30-40 µs) periodama odabiranja bi}e zadovoljena krozrazvoj i primenu naro~itih digitalnih pogonskih kontrolera –servoprocesora – sa mogu}no{}u obavljanja 50-100e6operacija u sekundi. Trendovi u razvoju programabilnihlogi~kih kola (FPGA) ukazuju da }e se jedan deo obradesignala u okviru pogona realizovati izvan kontrolera, pa semogu o~ekivati hardverske realizacije digitalnih estimatorasa znatno ve}om brzinom rada. Kod elektri~nih pogona bezdava~a polo`aja i kod primena parametarske estimacijespektra u odre|ivanju parametara i stanja neohodni }e bitidigitalni pogonski kontroleri sa numeri~kim kapacitetom do300 MIPS.
Sposobnost digitalno upravljanog elektri~nogpogona da se bez intervencije operatora prilagodipromenama u procesu i varijacijama parametara pogona }evremenom dobijati na va`nosti. Pored algoritama za (sporu)

adaptaciju, treba o~ekivati razvoj i primenu robusnihalgoritama i pristupa upravljanju pogonom. Kvalitet obrade,brzinu i ta~nost odziva servo petlje ili druga~ije zadatsinteti~ki kriterijum performanse treba garantovati i uuslovima kada parametri motora i proizvodnog procesavariraju na proizvoljan na~in unutar svojih grani~nihvrednosti. Zna~aj i slo`enost pomenutih problema u~ini}eda na njihovom re{avanju u narednim godinama budeanga`ovan veliki broj istra`iva~a. U oblasti digitalnoupravljanih elektri~nih pogona je za veliki broj problemave} na|eno adekvatno re{enje, ali preostali problemi i noveprimene predstavljaju polje u kome je mogu}e dati zna~ajannau~ni i prakti~ni doprinos.
5. LITERATURA
[1] V. R. Stefanovi}: “Present trends in Variable Speed ACDrives”, in Conf. Rec. of IPEC 1983, pp. 438-449
[2] B.K. Bose, (Editor) “Adjustable AC Drives”, IEEEPress 1981.
[3] I. Boldea and S.A. Nasar, “Vector control of ACDrives”, CRC Press, 1992.
[4] DBC drives data sheet, Vickers Elge, SettimoMilanese, Italy, 1993.
[5] “FASK permanent magnet servo motors data sheets”,Vickers Polymotor 1992.
[6] Kovacs,K.P.; Racz,I.: "Transiente Vorgange inWechselstrommaschinen", Budapest, PublishingHouse of the Hungarian Academy, of Sciences 1959.
[7] Hasse,K.: "On the dynamics of speed controlled staticAC drives with squirrel cage inductionmachines",Ph.D.Dissertation, Technische HochschuleDarmstadt, 1969.
[8] Blaschke,F.: "Das verfahren der feldorientierung zurregelung drehfeld maschinen", Ph.D.Dissertation,TU Braunschweig, 1974.
[9] Y.Y Tzou, H.J. Hsu, “FPGA Realization of Space –Vector PWM Control IC for Three-Phase PWMInverters”, IEEE Trans. On Power Electronics,Vol.12, No. 6, Nov. 1997, pp.953-963
[10] Leonhard,W.: "Adjustable Speed AC Drives",Proceedings of the IEEE, vol 76, No 4, April 1988,pp. 455-471
[11] Gabriel,R.; Leonhard,W.; Nordby,C.J.: "Field OrientedControl of a standard AC motor usingMicroprocessors", IEEE Trans. on Ind. Appl. vol IA16, No 2, March/April 1980. , pp 186 192
[12] Lipo,T.A.: "Recent progress in the Development ofSolid State AC Motor Drives", IEEE Trans. on PowerElectronics, vol PE3, No 2, April 1988., pp 105 117
[13] Gabriel,R.; Leonhard,W.: "Microprocessor Control ofInduction Motors", in Conf. Rec. of IEEEISPCC,1982., pp 385 394
[14] Lessmeier,R.; Schumacher,W.; Leonhard,W.:"Microprocessor controlled AC ServoDrives withSynchronous or Asynchronous Motors: which ispreferrable?", IEEE Trans. on Ind. Appl.vol IA 22,No 5, Sept./Oct. 1986., pp. 812-819
[15] B.K. Bose “Power electronics and AC drives”,Prentice Hall 1986.
[16] R.W. De Doncker and D.W. Novotny, “The UniversalField Oriented Controller”, IEEE-IAS Conf. Rec.1988., pp. 450-456
[17] Miles,A.R.; Novotny,D.W.: "Transfer Functions of theSlip Controlled Induction Machine", IEEE Trans. onInd. Appl. , vol IA 15, No 1, Jan./Feb. 1979., pp 5462
[18] Guisatski,U.M.: "Structure and dynamiccharacteristics of CSI induction motor drive", Proc. ofthe ICEM , Part 1, Budapest, 1982., pp. 199-202
[19] Wang,C.; Novotny,D.W.; Lipo,T.A.: "An AutomatedRotor Time Constant Measurement System forIndirect FieldOriented Drives", IEEE Trans. on Ind.Appl., vol IA 24, No 1, Jan./Feb. 1988., pp. 151-159
[20] Krishnan,R.; Doran,F.C.: "A method of Sensing LineVoltages for Parameter adaptation of InverterfedInduction Motor Servo Drives", ibid, pp. 617-622
[21] Leonhard,W.: "Control of Electrical Drives",SpringerVerlag 1985.
[22] “TMS320F240 DSP Users manual”, Texas Instruments1997.
[23] Digital signal processing solution: TMS320C62XXTechnical brief, Texas Instruments, January 1997.
[24] N.J. Kim, H.S. Moon, D.S. Hyun, “Inertia Identificationfor the Speed Observer of the Low Speed Control ofInduction Machines”, IEEE Trans. On IndustryApplications, Vol. 32, No. 6, Nov/Dec 1996. Pp1371-1379
[25] M.Y. Chow “Methodologies of using Artificial NeuralNetwork and Fuzzy Logic Technologies for MotorIncipient Fault Detection”, World ScientificPublishing Co Pte, Ltd, 1997.
[26] S. Vukosavi}, V. R. Stefanovi}, “SRM invertortopologies; a comparative evolution”, IEEE Trans.Industry Appliications, vol. 27, no. 6, pp.1034-1047,Nov./Dec.1991.
[27] Asymmetrical 6/2 SR drive, ACORN - EuropeanWasher Project, Emerson Electric Co, ElectronicSpeed Control Division, St. Louis U.S.A. 1988.
[28] S. N. Vukosavi}: "Third harmonic comutation controlsystem and method", USA Patent 4912378, March27., 1990
[29] Philip C. Kjaer and Gabriel Gallegos-Lopez , “Single-sensor Current Regulation in Switched ReluctanceMotor Drives” in Conf. Rec. of IEEE IAS AnnualMeeting 1997.
[30] M. Chis, S. Jayaram, R. Ramshaw , K. Rajashekara,“Efficiency Optimization of EV Drive Using FuzzyLogic” in Conf. Rec. of IEEE IAS Annual Meeting1997.
[31] Slobodan N. Vukosavi}, Ljiljana S. Peri}, VladanDimitrijevi}: “Trofazni stati~ki pretvara~i zaregulaciju brzine obrtanja elektromotornih pogona saasinhronim motorom u `eleznici”, The 4th
International Scientific conference of railways expertJU@EL, Vrnja~ka Banja, October 2-4. 1997. pp. 170-177
[32] V. Stefanovi}, D. Borojevi}, Current Problems inIndustrial Drives, in Proc. VIII Conference

Energetska elektronika - Ee'95, Novi Sad, Serbia,Yugoslavia, 1995.
[33] A. Nabae, I. Takahashi, H. Akagi, “A New Neutral-Point-Clamped PWM Inverter,” IEEE Trans. Ind.Applicat., Vol IA-17, No. 5, pp 518-523, Sep./Oct.1981
[34] R. Joetten, Chr. Kehl, “A fast space-vector control for athree level voltage source inverter,” Conf. Proc. EPE‘91 (Firenze), Vol. 2, pp 70-75, 1991
[35] A. Barazzouk, A. Cheriti and G. Olivier “A NeuralNetworks Based Field Oriented Control Scheme forInduction Motors”, in Conf. Rec. of IEEE IASAnnual Meeting 1997.
[36] Kenji Inoue, Junji Yoshitsugu, Shin Shirogane,Prasanna Boyagoda, and Mutsuo Nakaoka“Automatic Learning Control-Based Gain ParameterAuto-Tuning Scheme for AC Servo System” in Conf.Rec. of IEEE IAS Annual Meeting 1997.
[37] Blaschke,F.: "Das Prinzip der Feldorientierung dieGrundlage fur die TRANSVEKTOR Regelung vonDrehfeldmaschinen", Siemens Zeitschrift 45, Heft 10,1971. pp. 757-760
[38] Floter,W.; Ripperger,H.: "Die TRANSVEKTORRegelung f5t1r die, Feldorientierten Betrieb einerAsynchronmaschinen" ibid, pp. 761-764
[39] Langweiler,F.; Richter,M.: "Flusserfassung inAsynchronmaschinen" , ibid , pp.768-771
[40] Novotny,D.W.; Lorenz,R.D.: "Introduction to FieldOrientation and HighPerformance ACDrives",publication of the Industrial DrivesCommittee of the IEEE Ind. Applications Society,1985.
[41] Doncker,R.D.; Novotny,D.W.: "The UniversalFieldOriented Controller", ibid , pp. 450-456
[42] Leonhard,W.: "Field Orientation for controlling ACMachines principle and application", IEE ThirdInternational Conf. on Pow. Elect. and Var.SpeedDrives, London 1988, pp.277-282
[43] Leissmeier, R. Leonhard,W. "Microprocessorcontrolled Induction Motor Servo Drive for HighDynamic Performance", ibid, pp. 431-438
[44] Stoji},M.R.; Jovanovi},P.: "Direct digital servo control,system: Design, practice, and algorithms formicroprocessor, applications", Automatika, YugoslavJournal of ETAN, No 56, December 1981.
[45] Kirschen,D.S.; Novotny,D.W.; Lipo,T.A.: "OptimalEfficiency Control of an Induction Motor Drive",IEEE Trans. on Energy Conversion, vol EC 2, No 1,March 1987., pp 70 76
[46] Loser,F.; Sattler,P.K.: "Optimizing the efficiency by thecontrol of inverterfed induction machine especiallyregarding saturation and heat effects",in Conf. Rec. ofthe Third IFAC Symp., Lausanne, Switzerland,1983., pp. 25-32
[47] Khater,F.M.H.; Novotny,D.W.: "EfficiencyOptimization for Constant Horsepower Operation ofInduction Machines", Int. Conf. on Evolution andModern Aspects of Induction Machines, Torino, Italy,July 1986, pp. 9-16
[48] C.Y. Won et. al. “New Fuzzy-Sliding Mode Controllerfor Position Control of Induction Motors”, IEEE-IECON Conf. Record 1993, pp. 115-121
[49] L.A. Zadeh, “Fuzzy Sets”, Information & Control, Vol.8, No. 3, 1965, pp. 338-353
[50] M.A. El-Sharkawi et.al. “High performance drive ofbrushless motors using neural networks” IEEE Tran.on Energy Conversion, Vol. 9, No. 2, June 1994, pp317-322.
[51] M.G. Simoes and B.K. Bose, “Neural Network BasedEstimation of Feedback Signals for a VectorControlled Induction Motor Drive”, IEEE Trans. onInd. Applications, Vol. 31, No. 3, May-June 1995.
[52] H.M. Tai et al., “A Neural Network Based TrackingControl”, IEEE Trans. on Ind. Electronics, Vol. 39,No. 6, Dec. 1992, pp 504-510.
[53] C. Studer, A. Keyhani, T. Sebastian, S. K. Murthy, “Study ofCogging Torque in Permanent Magnet Machines” inConf. Rec. of IEEE Industrial Applications SocietyAnnual Meeting 1997.
[54] Yukio Honda, Shizuka Yokote, Toshiro Higaki, YojiTakeda, “Using the Halbach Magnet Array toDevelop an Ultrahigh-Speed Spindle Motor forMachine Tools”, in Conf. Rec. of IEEE IndustrialApplications Society Annual Meeting 1997.
[55] M. F. Rahman, L. Zhong and K. W. Lim “A Direct TorqueControlled Interior Permanent Magnet SynchronousMotor Drive Incorporating Field Weakening” inConf. Rec. of IEEE Industrial Applications SocietyAnnual Meeting 1997.
[56] A. Vagati, M. Pastorelli, G. Franceschini, C. Petrache “Design ofLow-Torque-Ripple Synchronous Reluctance Motors”, inConf. Rec. of IEEE Industrial Applications SocietyAnnual Meeting 1997.
[57] V. Davidkovich, A. M. Stankovic and G. Tadmor“Analysis and Experiments with Dissipativity-BasedControl of PM Synchronous Motors” in Conf. Rec. ofIEEE Industrial Applications Society Annual Meeting1997.
[58] F. Schütte, S. Beineke, A. Rolfsmeier, H. Grotstollen,“Online Identification of Mechanical ParametersUsing Extended Kalman Filters”, in Conf. Rec. ofIEEE Industrial Applications Society Annual Meeting1997.
[59] K. M. Rahman A. V. Rajarathnam M. Ehsani,“Optimize&Instantaneous Torque Control ofSwitched Reluctance Motor by Neural Network”, inConf. Rec. of IEEE Industrial Applications SocietyAnnual Meeting 1997.
[60] Stephen L. Hero, Dover Instrument, PCIM 1991, Nov1991, pp 39 - 42
[61] Sayeed Mir Malik Elbuluk Iqbal Husain, “TorqueRipple Minimization in Switched Reluctance Motorsusing Adaptive Fuzzy Control”, in Conf. Rec. ofIEEE Industrial Applications Society Annual Meeting1997.
[62] Makoto Iwasaki, Koji Sakai, and Nobuyuki Matsui,“Fuzzy Inference-Based On-Line Control GainTuning for Servo Drive System”, in Conf. Rec. of

IEEE Industrial Applications Society Annual Meeting1997.
[63] Krzysztof Russa, Ilbal Husain, Malik Elbuluk, “TorqueRipple Minimization in Switched ReluctanceMachines Over a Wide Speed Range”, in Conf. Rec.of IEEE Industrial Applications Society AnnualMeeting 1997.
[64] Ohmae, T. Matsuda, M. Kanno, K. Saito, and T.Sukegawa, “A Microprocessor-based motor speedregulator using fast-response state observer forreduction of torsional vibrations,” IEEE Trans. onInd. Applications, vol. IA-23, no. 5, pp. 863-871,Sep/Oct. 1987,
[65] S.T. Hung and J.C. Hung, “Digitally compensatedresolvers,” Proc. IECON 1984, Tokyo, Japan, pp.625-627.
[66] S. Ozaki et. al., “A Microprocessor based DC motordrive with a state observer for impact dropsuppression,” in Conf. Rec. of 1983 IEEE IAS AnnualMeeting, pp. 771-775, Oct. 1983.
[67] G. Brandenburg and W. Walfermann, “Stateobservers for multi motor drives in processingmachines with continuous moving webs,” in EPEConf. Record, Oct. 1985, pp. 3.203-3.208.
[68] K. Sugiura and Y. Hori, “Vibration suppression in 2-and 3-mass system based on the feedback of imperfectderivative of the estimated torsional torque,” IEEETrans. Ind. Electronics, vol. IE-43, no. 1, pp.. 56-64,Feb. 1996.
[69] K. Kaneko, K. Ohnishi et. al., “Accurate torquecontrol for a geared DC motor based on anacceleration controller,” in Proceedings of the IEEEIECON 1992, vol. 2, pp.. 395-400.
[70] F. Profumo, M. Madlena, and G. Griva, “Statevariables controller design for vibrations suppressionin electric vehicles,” in Conf. Rec. of the PESC 1996,pp.. 1940-1947.
[71] J.K. Ji and S. K. Sul, “Kalman filter and LQ basedspeed controller for torsional vibration suppression ina 2-mass motor drive system,” IEEE Trans. Ind.Electronics, vol. 42, no. 6, pp.. 564-571, Dec. 1995.
[72] J.Y. Hung, “Control of industrial robots that havetransmission elasticity,” IEEE Trans. Ind.Electronics, vol. IE-38, no. 6, pp. 421-427, Dec.1991.
[73] S. Colombi and T. Raimondi, “Compliancecompensation in mechatronic systems,” inProceedings of the IEEE IECON 1994, pp. 946-951.
[74] W. Leonhard, “Digital signal processing for trajectorycontrol of a multi-axis robot with electrical servodrives,” Proc. 15th IEEE IECON, Philadelphia, pp.341-355, Nov. 1989.
[75] S. Meshkat, “Digital control design for systems withresonance problem,” in ‘Advanced Motion Control’,PCIM Ref. Series in Power Electronics and Intelligentmotion, pp. 9-44.
[76] D.C. Hanselman, “Resolver signal requirement forhigh accuracy resolver to digital conversion,” IEEETrans. Ind. Electronics, vol. IE-37, no. 6,pp. 556-561, Dec. 1990.
[77] S. N. Vukosavi}, M. R. Stoji}, “Supression of TorsionalOscillations in a High Performance Speed ServoDrive”, IEEE Trans. on Ind. Electronics, Vol. 45, No.1, pp. 108-117
[78] O. Masory, “Real Time Estimation of cutting processparameters in turning”, J. Eng. Ind., Vol 106, pp.218-221, Aug. 1984
[79] R. Toutant et.al.,: “Feedrate Compensation forConstant Cutting Force Turning”, IEEE ControlSystems Dec 1993, pp. 44-47 Vol. 13, No. 6
[80] Kuperstein and J. Wang (1990), “Neural Controller forAdaptive Movements with Unforeseen Payloads”IEEE Transactions On Neural Networks, Vol. 1, No.1, pp.137 142.
[81] Tomochika Ozaki, Tatsuya Suzuki, Shigeru OkumaandYoshiki Uchikawa (1991), “Trajectory Control ofRobotic Manipulators Using Neural Networks”, IEEETransactions On Industrial Electronics, Vol. 38, No.3, pp. 195-202.
[82] T. Inomata, “Linear motor for mechanical component”,Semitsu Kogaku Gakkai Shi 1990, Vol 56, No 2, pp48-52
[83] T. Suzuki, “DD-type linear motor systems and theirapplications”, J. Robotics and Mechanotronics, Vol 1,1989, pp 328-332
[84] M.H. Park K.S. Kim, “Chattering Reduction in thePosition Control of Induction Motor Using the SlidingMode”, IEEE Trans. On Power Electronics, Vol. 6,No. 3, July 1991.
[85] M.H. Raibert and J.J. Craig, “Hybrid Position/ForceControl of Manipulators”, ASME J. of DynamicSystems, Measurement, and Control, vol. 103, pp.126-133
[86] S. Chiaverini et. al. “Force/Position Regulation ofCompliant Robot Manipulators”, IEEE Trans. onAutomatic Control, vol 39, pp. 647-652, 1994.
[87] G. Zhang, J. Furusho, and M. Kajitani, “Control offlexible – joint manipulators using joint torque andacceleration feedback”, Proc. 3rd Int. Conf. on Motionand Vibration Control, pp. 245-250, September 1996.
[88] “DBM041 application in Verrerie Cristalerie d’Arc(F)”, VESTAR 003/1998, publication of VickersElectrics, Casella (GE), Italy.
[89] “HEDS-9200 optical encoders data sheet”, Hewlett-Packard 1996.
[90] Karam Z. Karam, “Moving ahead in control”, PCIMEurope, July/August 1993, pp. 188-190
[91] “PDBS Application Manual GB-4519 Rev.2”, May1997. Vickers Electrics, Casella, (GE), Italy
[92] S. N. Vukosavi}, Microprocessor-Based AdaptiveSpeed and Position Control of Induction MotorDrives, Ph.D. dissertation, University of Belgrade,1989.
[93] Ohnishi,K.; Suzuki,H.; Miyachi,K.: "Decouplingcontrol of, Secondary Flux and Secondary Current inInduction Motor Drive, with a Controlled VoltageSource and it's comparison with, Volt/Hertzcontrol",IEEE Trans. on Ind. Appl.vol IA 21, No 1,1985, pp. 241-247

[94] Zheng,K.W.; Strangas,E.G.: "Feed Forward FieldOrientation, Control of an Induction motor using aPWM Voltage Source, Inverter and StandardizedSingle Board Computers", IEEE, Trans. on Ind.Elect. , vol IE35, No 2, Feb. 1988, pp. 75-79
[95] Bordry,F.; Fornel,B.; Trannoy,B.: "Flux and Torquenumerical control of a Voltage fed AsynchronousInduction Machine", IEE Proc. B, vol 127, No 2,1980., pp 91 95
[96] Xu,X.; Doncker,R.D.; Novotny,D.W.: "Stator FluxOrientation Control of Induction Motor in the Fieldweakening Region", in Conf. Rec. of IEEE IASAnnual Meeting, 1988, pp 437 443
[97] Lipo,T.A.; Chang,K.C.: "A new approach to flux andtorque sensing in induction machines", IEEE Trans.on Ind. Appl. vol IA 22, No 4, 1986. , pp 731-737
[98] Edward,Y.Y.H.; Paresh,C.S.: "Decoupling Control ofInduction Motor Drives", IEEE Trans. on Ind.Electronics, vol IE 35, No 2, May 1988, pp 253 262
[99] Harashima,F. et al.: "Multi MicroprocessorbasedControl System for Quick Response Induction MotorDrive", IEEE Trans. on Ind. Appl. vol IA 21, No 4,1985., pp 602 609
[100] Loeser,F.; Sattler,P.H.: "Identification andCompensation of the Rotor Temperature of AC Drivesby an Observer", IEEE Tr. on Ind. Appl., vol IA 21,No 6, 1985., pp 1387 1393
[101] Matsuo,T.; Lipo,T.A.: "A Rotor ParameterIdentification Scheme for VectorControlled InductionMotor Drives", IEEE Trans. on Ind. Appl. , vol IA21, No 4, 1985., pp 624 632
[102] Nordin,K.B.; Novotny,D.W.; Zinger,D.S.: "Theinfluence of, Motor Parameter deviations inFeedforward Field orientation, Drive Systems ", IEEETrans. on Ind. Appl. , vol IA 21, No 4,, July/August1985., pp 1009 1015
[103] Garces,L.: "Parameter Adaptation for theSpeedControlled, Static ACDrive with SquirrelcageInduction Motor operated, with Variable FrequencyPower Supply",IEEE Trans.on Ind.Appl., vol IA 16,No 2, 1980., pp 173 178
[104] Zai,L.C.; Lipo,T.A.: "An Extended Kalman FilterApproach to Rotor Time Constant Measurement inPWM Induction Motor Drives",in Conf. Rec. of IEEEIAS Annual Meeting, Oct. 1987., pp 177 183
[105] Boussak,M.; Capolino,G.A.: "Modern control tools foridenti fication of the three phase induction motors",International Conference on Electric Machines,1988., pp 215 220
[106] Schmidt,R.: "Online identification of the secondaryresista nce of an induction motor in the lowfrequencyrange using a test vector", ibid, pp 221 226
[107] Vetter,T.;Andresen,E.C.:"Parameter identification andonline, rotor temperature monitoring of ACsquirrelcage motors", ibid, pp 251 256
[108] Lorenz,R.D.; Lawson,D.B.: "A simplified approach tocontinu , ous online tuning of field oriented inductionmachine dri ves", in Conf. Rec. of IEEE IASAnn.Meet., 1988, pp. 444 449
[109] Tsuji,T.; Oguro,R.; Sherif,M.Z.: "Online identificationof parameters in rotor circuit of induction machine",Int. Conf. on Evolution and Modern Aspects ofInduction Machines, Torino 1986., pp 17 20
[110] Lorenz,R.D.: "Tuning of FieldOriented InductionMotor Cont rollers for High PerformanceApplications", IEEE Trans. on Ind. Appl., vol IA 22,No 2, March/April 1986., pp 293 297
[111] Evans,R.J.: Cook,B.J.; Betz,R.E.: "Nonlinear AdaptiveControl of an Inverterfed Induction Motor LinearLoadCase", IEEE Trans. on Ind. Appl., vol IA 19, No 1,January/February 1983. pp 74 83
[112] Irisa,T.; et al.: "RelIA bility of Induction Machines forHigh Performance based on ParameterCharacteristics", IEEE Trans. on Ind. Appl., vol IA21, No 2, March/April 1985., pp 414 421
[113] Kumamato,A.; Tada,S.; Hirane,Y.: "Speed Regulationof an In duction Motor using Model ReferenceAdaptive Control", IEEE Control Systems Magazine,October 1986., pp 25 29
[114] Sugimoto,H.; Tamai,S.: "Secondary ResistanceIdentification of an Induction Motor applied ModelReference Adaptive System and it's characteristics",IEEE Tran. on Ind. Appl. , vol IA 23, No 2,March/April 1987., pp 296 303
[115] Koyama,M.; et al.: "Effects of parameter change oncoordinate control system of induction motor", inConf. Rec. of the IPEC Tokyo, 1983., pp 684 695
[116] Ohnishi,K.; Ueda,Y.; Miyachi,K.: "Model ReferenceAdaptive System Against Rotor Resistance Variationsin Induction Motor Drives", IEEE Trans. on Ind.Elect., vol IE33, No 3, August 1986., pp 217 223
[117] Blaschke et al.: "Device for determining the parametervalues for stator resistance,principal inductance andleakage induc tance of an asynchronous machine",U.S. Patent 4,423,367, Decembar 27., 1983.
[118] Bayer et al.: "Method and apparatus for determiningthe rotor resistance of an asynchronous machine",U.S. Patent 4,441,065 April 3., 1984.
[119] Vas,P.; Alakula,M.; Hallenius,K.E.: "FieldOrientedControl of Saturated AC Machines", in Conf. Rec. ofthe IEE Third International Conf. on Power Elect.and VarIA ble Speed Drives, , London, 1988., pp 283286
[120] He,Y.K.; Lipo,T.A.: "Computer simulations of aninduction ma chine with spatially dependentsaturation", IEEE Trans. on PAS, vol PAS 103, No 4,April 1984., pp 707 714
[121] Khater,F.M.; et al.: "Selection of Flux Level in FieldOrien ted Induction Machine Controllers withconsideration of Mag netic Saturation Effects", IEEETrans.on Ind. Appl.,vol IA 23, No 2, March/April1987., pp 276 282
[122] Ostovic,V.: "A Method for Evaluation of Transientand Steady State Performance in SaturatedSquirrelCage Induction Machi nes", WisconsinElectric Machines and Power Electronics Con sortiumResearch R1eport 85 1

[123] Ostovic,V.: "Magnetic Equivalent CircuitRepresentation of Electric Machines", ibid, 87 2
[124] Creer,W.H.; Novotny,D.W.; Lipo,T.A.:"Determination of Equivalent Circuits for InductionMachines with Skin Effect Using TerminalCharacterictics", ibid, 85 3
[125] Paszek,W.; Pawelec,Z.: "Electromagnetic Parametersof the Induction Machine with WedgeshapedDeepBar Rotor", Int. Conf. on Evolution and ModernAspects of Induction Machines, Torino 1986., pp 321328
[126] Doncker,R.D.: "Field Oriented Controllers with RotorDeepBar Compensation Circuits", in Conf. Rec. of theIEEE IAS Ann. Meet., Oct. 1987., pp. 142-149
[127] E.Levi, V.Vu~kovi}, S.Vukosavi}: "Study ofmain flux saturation effects in field-orientedinduction motor drives", IEEE Ind. Elect. Annualmeeting IECON 1989, pp 219-229
[128] E.Levi, S.Vukosavi}, V motor drives", PowerElectronics Specialists Conf. PESC 1989, pp 591-598.Vu~kovi}: "Saturation compensationschemes for vector controlled induction
[129] S.N.Vukosavi}, M.R.Stoji}: "On-Line Tuning ofthe Rotor Time Constant for Vector-ControlledInduction Motor in Position ControlApplications", IEEE Trans. on Ind. Electronics, Vol.40, No.1, February 1993
[130] Mar~eti} Darko, Slobodan Vukosavi}: “Identifikacijaparametara rotorskog kola vektorski kontrolisanogasinhronog motora zasnovana na estimacijielektromagnetnog momenta”, IX SimpozijumEnergetska elektronika EE97, Novi Sad 22-24. 10.1997. pp 253- 260
[131] S. Weisgerber A. Proca A. Keyhani, “Estimation ofPermanent Magnet Motor Parameters”. in Conf. Rec.of IEEE IAS Annual Meeting 1997.
[132] A. Boglietti, M. Lazzari, M. Pastorelli “Iron LossesPrediction with PWM Inverter Supply using SteelProducer Data Sheets”, in Conf. Rec. of IEEE IASAnnual Meeting 1997.
[133] Mohammad N. Marvali, Ali K. Keyhani “AComparative Study of Rotor Flux Based MRAS andBack EMF Based MRAS Speed Estimators for SpeedSensorless Vector Control of Induction Machines”, inConf. Rec. of IEEE IAS Annual Meeting 1997.
[134] C.E. Coates, D. Platt and B.S. P. Perera “DesignOptimisation of an Axially Laminated SynchronousReluctance Motor” in Conf. Rec. of IEEE IAS AnnualMeeting 1997.
[135] T. A. Sakharuk, B. Lehman, A. M. Stankovic and G.Tadmor “Efects of Finite Switching Frequency andComputational Delay on PWM Controlled Servo DCDrives “ in Conf. Rec. of IEEE IAS Annual Meeting1997.
[136] D.R. Chouiter, G. Clerc, F. Thollon, J.M. Retif, “H∝Controllers design for field oriented asynchronousmachines with genetic algorithm” in Conf. Rec. ofIEEE IAS Annual Meeting 1997.
[137] C.J. Bonanno, L. Zhen, L. Xu, “A direct field orientedinduction machine drive with robust flux estimator
for position sensorless control” in Conf. Rec. of IEEEIAS Annual Meeting 1995, pp. 166-173
[138] T.Ohtani, N. Takada, K. Tanaka, “Vector control ofinduction motor without shaft encoder” IAS Annualmeeting 1989 pp 500-507
[139] S.O. Bogosyan, M. Gokosan, “ Adaptive torqueripple minimization of permanent magnetsynchronous motors for direct drive applications”, inConf. Rec. of IEEE IAS Annual Meeting 1995, pp.231-237
[140] A.W. Kelley et. al. “On-line wideband measurement ofinduction motor impedance”, in Conf. Rec. of IEEEIAS Annual Meeting 1995, pp 647-654
[141] L. Harnefors, H.P. Nee, “Robust Current Control ofAC Machines Using the Internal Model ControlMethod”, in Conf. Rec. of IEEE IAS Annual Meeting1995, pp 303-309
[142] Jonsson, Ragnar, "Natural Field Orientation for ACInduction Motor Control", PCIM-Europe Magazine,May/June 1991, pp 132-138
[143] Kirschen,D.S.; Novotny,D.W.;Suwanwisoot,W.:"Minimizing In duction MotorLosses by Excitation Control in Variable Fre quencyDrives", IEEE Trans. on Ind. Appl., vol IA 20, No 5,Sept/Oct. 1984., pp 1244 1250
[144] Saito,S.; et al.: "New application of current typeinverter", ibid, vol IA 20, No 1, 1984, pp 226 235
[145] 109 Kim,H.G.; Sul,S.K.; Park,M.H.:"OptimalEfficiency Drive of a, CSI-fed Induction Motor byFlux Control", ibid , No 6, , Nov./Dec., 1984., pp1453 1459
[146] Kirschen,D.S.; Novotny,D.W.; Lipo,T.A.: "Onlineefficiency optimization of a variable frequencyinduction motor drive", IEEE Trans.on Ind. Appl.,volIA 21,May/June 1985, pp. 610-616
[147] Sangwongwanich,S.; et al.: "Realization oftimeoptimal singlestep velocity response control offieldoriented induction machines under the conditionof nonsaturation of flux", IEEE IAS Ann. Meet.,1988, pp. 345-351
[148] Sangwongwanich,S.; et al.: "Manipulation of RotorFlux for Time Optimal Single Step Velocity Responseof FieldOriented Induction Machine", IEEE Trans. onInd. Appl., vol IA 24, No 2, March/April 1988, pp.262 270
[149] Analog Devices Inc., “Design-in reference manual,”1996.
[150] Miodrag Popovi}, “Digitalna obrada signala”,Nau~na knjiga, Beograd, 1996.
[151] Leposava Mati}, Mili} Stoji}, VladanVu~kovi}, Slobodan Vukosavi}: “Efficiencyoptimization of induction motor drives withmechanism against speed dips on sudden loadchanges”, Proceedings of the Seventh Intl. PowerElectronics & Motion Control Conference, PEMC 96,Budapest, Hungary, September 1996.
[152] Priru~nik za rad u Laboratoriji zamikroprocesorsko upravqaweelektromotornim pogonima Elektrotehni~kog

fakulteta, skripta ETF Beograd 1996, www:kiklop.etf.bg.ac.yu\nastava\te5mue
[153] Murray. A, Kettle P., “Towards a single chip DSPbased Motor Control Solution” Proc. PCIMIntelligent Motion, May 1996, Nurnberg, Germany,pp. 315-326
[154] Lucey D.J., et. al. “Comparison of various space vectormodulation strategies”, Proc. Irish DSP and ControlColloquium, July 1994, Dublin, Ireland, pp. 169-175
[155] “80C196MC Users manual”, Intel Corporation, St.Clara 1992.
[156] Edmund Preiss, “Microcontrollers or DSP chips inmotion control,” PCIM Europe, May/June 1992, pp.112-115
[157] D. Su, M. Loinaz, S. Masui, B. Wooley, “experimentalResults and Modeling Techniques for Substrate Noisein Mixed-Signal Integrated Circuits”, IEEE Journalof Solid-State Circuits, Vol. 28, No. 4, pp. 420-429,April 1993.
[158] K. M. Fukuda, S. Maeda, T. Tsukada, T. Matsuura,“Substrate Noise Reduction using Active Guard BandFilters in Mixed-Signal Integrated Circuits”, 1995Symposuim on VLSI Circuits Digest of TechnicalPapers, pp. 33-34, 1995.
[159] Zabele{ke sa predavanja Jelene Popovi}, asistenta priKatedri za Elektroniku Elektrotehni~kog fakulteta uBeogradu, april 1998.
[160] Shaotang Chen Thomas A. Lipo “Bearing Currentsand Shaft Voltages of an Induction Motor Under Hardand Soft Switching Inverter Excitation”, in Conf.Rec. of IEEE IAS Annual Meeting 1997.
[161] Mike Melfi, Jason Sung Sid Bell Gary Skibinski“Effect of Surge Voltage Risetime on the Insulation ofLow Voltage Machines Fed by PWM Converters” inConf. Rec. of IEEE IAS Annual Meeting 1997.
[162] Yoshitaka I., Takashi S., Toshiaki O.,Takashi I.,Masakane S. and Masahiro TOBISE., “A New PWMMethod to Reduce Beat Phenomenon in LargeCapacity Inverters with Low-Switching Frequency”,in Conf. Rec. of IEEE IAS Annual Meeting 1997.
[163] Michael T. DiRenzo Wasim Khan, “Self-TrainedCommutation Algorithm for an SR Motor DriveSystem without Position Sensing”, in Conf. Rec. ofIEEE IAS Annual Meeting 1997.
[164] B. K. Bose, M. G. Simoes, “Speed sensorless hybridvector controlled induction motor drive”, in Conf.Rec. of IEEE IAS Annual Meeting 1995. pp, 137-143
[165] Bimal K. Bose and Nitin R. Patel, “A sensorless statorfilux oriented vector controlled inductionmotor drivewith neuro-fuzzy based performance enhancement”,in Conf. Rec. of IEEE IAS Annual Meeting 1997.
[166] Jung-Ik Ha. and Seung-Ki Sul, “Sensorless FieldOrientation Control of an Induction Machine by HighFrequency Signal Injection”, in Conf. Rec. of IEEEIAS Annual Meeting 1997.
[167] Namho Hur, Kichul Hong, and Kwanghee Namt,“Sensorless Vector Control in the Presence of Voltageand Current Measurement Errors by Dead-Time”, inConf. Rec. of IEEE IAS Annual Meeting 1997.
[168] Ryoji Mizutani, Takaharu Takeshit a and NobuyukiMatsui, “Current Model-Based Sensorless Drives ofSalient-Pole PMSM at Low Speed and Standstill”, inConf. Rec. of IEEE IAS Annual Meeting 1997.
[169] Peter B. Schmidt Michael L. Gasperi Glen Ray AjithH. Wijenayake “Initial Rotor Angle Detection Of ANon-Salient Pole Permanent Magnet SynchronousMachine”, in Conf. Rec. of IEEE IAS AnnualMeeting 1997.
[170] Erkan Mese David A. Torrey, “Sensorless PositionEstimation for Variable Reluctance Machines UsingArtifical Neural Networks”, in Conf. Rec. of IEEEIAS Annual Meeting 1997.
[171] Gabriel Gallegos-Lopez, Philip C. Kjaer, T.J.E.Miller, “A New Sensorless Method for SwitchedReluctance Motor Drives” in Conf. Rec. of IEEE IASAnnual Meeting 1997.
[172] Vladimir Blasko and Vikram Kaura WalterNiewiadomski, “Sampling of Discontinuous Voltageand Current Signals in Electrical Drives - A SystemApproach”, in Conf. Rec. of IEEE IAS AnnualMeeting 1997.
[173] J. Maas, T. Schulte, H. Grotstollen, “Optimized DriveControl for Inverter-Fed Ultrasonic Motors” in Conf.Rec. of IEEE IAS Annual Meeting 1997.
[174] M.W. Degner, R.D. Lorenz, “Using MultipleSaliencies for the Estimation of Flux, Position, andVelocity in AC Machines” in Conf. Rec. of IEEE IASAnnual Meeting 1997.
[175] Toshihiko Noguchi, Masaki Yamamoto, Seiji Kondo,and Isao Takahashi, “High Frequency SwitchingOperation of PWM Inverter for Direct Torque Controlof Induction Motor” in Conf. Rec. of IEEE IASAnnual Meeting 1997.
[176] LI Yongdong Shao, Jianwen SI Baojun, “DirectTorque Control of Induction Motors for Low SpeedDrives Considering Discrete Effects of Control andDead-time of Inverters” in Conf. Rec. of IEEE IASAnnual Meeting 1997.
[177] Venkatesh Chitta Soonwook Hong David A. Torrey,“Series Connection of IGBTs with Active VoltageBalancing” in Conf. Rec. of IEEE IAS AnnualMeeting 1997.
[178] F. Briz, M.W. Degner, R.D. Lorenz, “Analysis andDesign of Current Regulators Using ComplexVectors”, in Conf. Rec. of IEEE IAS AnnualMeeting 1997.
[179] Chris French, et.al. “Sensorless position control ofpermanent magnet drives”, in Conf. Rec. of IEEEIAS Annual Meeting 1995, pp. 61-68
[180] P.L. Jansen, R.D. Lorenz, “Transducerless Positionand velocity estimation in induction and salient ACmachines”, in Conf. Rec. of IEEE IAS AnnualMeeting 1994, pp. 488-495
[181] P.L. Jansen, R.D. Lorenz, “Transducerless fieldorientation concepts employing saturation inducedsaliencies in induction machines”, in Conf. Rec. ofIEEE IAS Annual Meeting 1995, pp. 174-181

[182] R.J. Kerkman, et. al. “A new flux and stator resistanceidentifier for AC drive systems”, in Conf. Rec. ofIEEE IAS Annual Meeting 1995, pp. 310-318
[183] H. Le-Huy, “An adaptive fuzzy controller forpermanent magnet AC servo drives”, in Conf. Rec. ofIEEE IAS Annual Meeting 1995, pp. 104-110
[184] N. Langovsky et. al. “Non-linear flux observer withon-line parameter tuning for wide speed operation ofinduction machines” in Conf. Rec. of IEEE IASAnnual Meeting 1995, pp. 144-151
[185] Praktikum za laboratorijske ve`be iz Elektri~ne vu~e,Elektrotehni~ki fakultet u Beogradu, Beograd 1996,www: kiklop.etf.bg.ac.yu\nastava\eg4ev
[186] Eckart Nipp, “Alternative to field-weakening ofsurface mounted permanent magnet motors forvariable speed drives” in Conf. Rec. of IEEE IASAnnual Meeting 1995, pp. 191-198
[187] T. Perl, I. Husain, M. Elbuluk, “Design trends andtrade-offs for sensorless operation of switchedreluctance motor drives”, in Conf. Rec. of IEEE IASAnnual Meeting 1995, pp. 278-285
[188] N.R. Garrigan et.al. “Start-up and sensor/parametererror transients in field oriented induction machines”,in Conf. Rec. of IEEE IAS Annual Meeting 1995, pp.319-326
[189] Zuorong Zhang et. al. “Peak thrust operation of linearinduction machines from parameter identification”, inConf. Rec. of IEEE IAS Annual Meeting 1995, pp.375-379
[190] C.Pollock, C.Y. Wu, “Acoustic noise cancellationtechniques for switched reluctance drives”, in Conf.Rec. of IEEE IAS Annual Meeting 1995, pp. 448-455
[191] N. Mikhaeil-Boules, “Design and analysis of linearactuator for active vibration cancellation”, in Conf.Rec. of IEEE IAS Annual Meeting 1995, pp. 469-475
[192] K.D. Hurst, T.G. Habetler, “Sensorless SpeedMeasurement Using Current Harmonics SpectralEstimation in Induction Motor Drives”, Proceedingsof PESC 1994, pp 10-15.
[193] S.M. Kay, S.L. Marple Jr, “Spectrum analysis – amodern perspective”, Proceeding of the IEEE, Vol 69,No 11, Nov 1981, pp 1380-1417
[194] Y.Q. Xiang, S.A. Nasar, “A fully digital controlstrategy for synchronous reluctance motor servodrives”, in Conf. Rec. of IEEE IAS Annual Meeting1995, pp. 254-262
[195] H. Gruning, B. Odegard, "High Performance low costMVA inverters realized with integrated Gatecomutatetated thyristors (IGCT)" , EPE, Trondheim,Norway, 1997.
[196] I. Husain,, M.Ehsani, “Torque ripple minimization inswitched reluctance motor drives by PWM currentcontrol”, IEEE Trans. Power Electronics, vol. 11,no.1, pp.83-88, Jan. 1996.
[197] M. Ehsani, I. Husain, A.B. Kulkarni, “Elimination ofdiscrete possition sensor and current sensor inswitched reluctance motor drives”, IEEE Trans.Industry Applications, vol. 28, no.1, pp.128-135 ,Jan./Feb.1992.
[198] P.P. Acanley, R,J.Hill, C.W. Hooper, “Detection ofrotor position in stepping and switched motors bymonitoring of current wavwforms”, IEEE Trans.Industrial Electronics, vol. 32, no.3, pp.215-221,Aug.1985.
[199] D.E. Cameron, J. H. Lang, S. D. Umans, “The originand reduction of acoustic noise in doubly salientvariable-reluctance motors”, IEEE Trans. IndustryApplications, vol.28, no.6, pp. 1250-1255, Nov./Dec.1992.
[200] McMurray,W.: "Modulation of the ChoppingFrequency in DC choppers and Inverters havingCurrent Hysteresis Controllers", IEEE Trans. on Ind.Appl., vol IA 20,1984., pp 763 768
[201] Brod,D.M.; Novotny,D.W.: "Current Control ofVoltage Source PWM Inverters",ibid, vol IA 21,1985., pp 562 570
[202] Holtz,J.: "Predictive controller for the stator currentcon trol vector of AC machines fed from a switchedvoltage source", Int. Power Elec. Conf., 1983., pp1665 1675
[203] Rowan,T.M.; Kerkman,R.J.: "A New SynchronousCurrent Regula tor and an Analysis ofCurrentRegulated PWM Inverters", in Conf. Rec. ofthe IEEE IAS Ann. Meet.,1985., pp 487 495
[204] Enjeti,P.; et al.: "New Current Control Scheme forPWM Inver ters", Proc. of the IEE, part B, vol 135,No 4, July 1988., pp 172 179
[205] Ueda,R.; et al.: "Unstable oscillating mode in PWMvariable speed drive of induction motor and it'sstabilization", IEEE IAS Annual Meeting , 1982., pp686 691
[206] Mutoh,N.; et al.: "Stabilization control methods forsuppre ssing oscillation of induction motor driven byPWM inverter", Int. Power Elect. Conf., Tokyo,1985., pp 639 646
[207] Lockwood,M.: "Simulation of unstable oscillations inPWM variable speed drives", IEEE Trans. on Ind.Appl., vol IA 24, No 1, January/February 1988.
[208] Lorenz,R.D.; Lawson,D.B.:"Performance ofFeedForward Current Regulators for Field OrientedInduction Motor Controllers", IEEE Trans. on Ind.Appl., vol IA 23, No 4, 1987., pp 597 602
[209] Vukosavi},S.; Miljani},P.: "Instantaneous feedback inVoltage Source Inverters: comparative study betweenlinear and non linear approach", in Conf. Rec. of theIEE Third Int. Conf. on Pow. Elect. and Var. SpeedDrives, London 1988, pp. 134-137
[210] Gaio,E.; Piovan,R.: "Comparative analysis ofhysteresis modu lation methods for VSI currentcontrol", ibid, pp 336 339
[211] Malesani,L.; Tenti,P.: "A novel hysteresis controlmethod for currentcontrolled voltage source PWMinverters with constant modulation frequency", IEEEIAS Ann. Meet.,1987., pp 851 855
[212] Sukegawa,T.; et al.: "Fully Digital,VectorControlledPWM VSI fed AC Drives with an Inverter DeadTimeCompensation Stra tegy",IEEE IAS Ann. Meet.,1988., pp 463 469

[213] Lorenz,R.D.; Divan,D.M.: "Dynamic Analysis andExperimental Evaluation of Delta Modulators forField Oriented AC Machine Current Regulators",Wisconsin Electric Machines and Power ElectronicsConsortium Research Report 87 9
[214] Schonnung,A.; Stemmler,H.: "Static frequencychangers with subharmonic control in conjunctionwith reversible variable speed AC drives",BrownBovery Rev.,Aug.Sept.1964. pp 555 577
[215] Plunkett,A.B.: "A Current Controlled PWMTransistor Inverter Drive", IEEE IAS Ann. Meet.,1979., pp 785 792
[216] Schauder,C.D.; Caddy,R.: "Current Control ofVoltage Source Inverters for Fast FourQuadrant DrivePerformance",IEEE Tr. on Ind. Appl., vol IA 18, No2, 1982., pp 163 171
[217] Murai,Y.; Watanabe,T.; Iwasaki,H.: "WaveformDistortion and Correction Circuit for PWM Inverterswith Switching Lag Times",IEEE Tran. on Ind.Appl.,vol IA-23, No. 5,1987, pp. 881-886
[218] Nabae,A.; et al.: "An approach to Flux Control ofInduction Motors Operated with VariableFrequencyPower Supply", IEEE Trans. on Ind. Appl.,vol IA 16,No 3,May/June 1980.,pp 342 349
[219] Wallace,A.K.; Spee,R.; Martin,L.G.: "Currentharmonics and acoustic noise in AC adjustable speeddrives", in Conf.Rec. of the IEEE IAS Ann. Meet.,1988., pp 483 488
[220] Mutoh,N.; et al.: "High Response Digital SpeedControl System for Induction Motors", IEEE Trans.on Ind. Elect., vol IE 33, No 1, Feb. 1986., pp 52 58
[221] C. P. Henza, N. Mohan, “A Digitally controlled ACto DC Power Conditioner that draws Sinusoidal InputCurrent”, Proc. of PESC 1986, pp. 531-540, 1986.
[222] T. C. Green, B. W. Williams, “Derivation of MotorLine-current Waveforms from the DC-link Current ofan Inverter”, IEE Proceedings B, Vol. 136, No. 4, pp.196-203
[223] J. K. Pedersen, P. Thogersen, “Stator flux orientedasynchronous vector modulation for AC drives”,Proceedings of PESC’ 90, pp. 641-648, 1990.
[224] T. G. Habetler, D.M. Divan, “Control Strategies forDirect Torque Control using Discrete PulseModulation”, Proceedings of IAS 1989, pp. 514-522,1989.
[225] Y. Xue, X. Xu, T.G. Habetler, D.M. Divan, “A LowCost Stator Flux Oriented Voltage Source VariableSpeed Drive” Proceedings of IAS 1990, pp. 410-415,1990.
[226] J. F. Mognihan, R.C. Kavanagh, M.G. Egan,J.M.D. Murphy, “Indirect Phase Current Detection forField Oriented Control of a Permanent MagnetSynchronous Motor Drive”, Proceedings of EPE1991, Vol. 3, pp. 641-646, 1991.
[227] M. Riese, “Phase Current Reconstruction of a Threephase Voltage Source Inverter fed Drive using sensorin the DC link”, Proceedings of PCIM 1996, pp. 95-101, 1996.
[228] Frede Blaabjerg, John K. Pedersen, “A new Low CostFully Fault Protected PWM-VSI Inverter with True
Phase Current Information”, Proceedings of IPEC1995, Vol. 2, pp. 984-991, 1995.
[229] T. Okuyama, N. Fujimoto, T. Matsui, Y. Kubota,“A High Performance Speed Control Scheme forInduction Motor without Speed and Voltage Sensors”in IEEE IAS Annual Meeting Conference Record, pp.106-111, 1986.
[230] T.G. Habetler, F. Profumo, G. Griva, M. Pastorelli, A.Bettini "Stator resistance tuning in a stator-flux field-oriented drive using an instantaneous hybrid fluxestimator", in IEEE Transactions on PowerElectronics, Vol. IE-13, No. 1, pp. 125-133, 1998.
[231] EPE Journal vol 4 No 2 June 1994, pp 38-42, “Threelevel IGBT inverters for industrial drives and tractionapplications”, Y. Tadros, S. Salama, Th. Schutze
[232] A. Tripathi and P. C. Sen, "Comparative analysis offixed and sinusoidal band hysteresis currentcontrollers for voltage source inverters", IEEE Trans.
on Industrial Electronics, vol. 3, No 1, Feb.1992, pp.63-73.
[233] M. P. Kazimierkowski and M. A. Dzieniakowski:“Review of Current Regulation Techniques for ThreePhase PWM Inverters”, in Proceedings of the 20th
IECON Conference, vol. 1, pp. 567-575, September5-9 1994, Bologna, Italy.
[234] L. Ben-Brahim and A. Kawamura, "Digital control ofinduction motor current with deadbeat response usingpredictive state observer", IEEE Trans. on Power
Electronics, vol. 7, No 3, July 1992, pp. 551-559.[235] M. Buhl and R.D. Lorenz, “Design and
implementation of neural networks for digital currentregulation of inverter drives” in IEEE IAS Ann. Mtg.Conf. Rec, pp 415-421, 1991.
[236] P. Nielsen, “The Matrix Converter for an InductionMotor Drive”, Industrial Ph.D. Fellowship, AalborgUniversity 1996, ISBN 87-89179-14-5.
[237] U.S. Patent Application 4.697.2301986, Neft/WestingHouse Electric Corp.
[238] L. Huber, D. Borojevic, “Digital Modulator ForcedCommutated Cycloconverters with Input PowerFactor Corrections”, Pro-ceed. of PESC ’92, pp. 518-523, 1992.
[239] Russel J. Kerkman, “Twenty Years of PWM ACDrives: When Secondary Issues become PrimaryConcerns”, IEEE Industrial Electronics Conference(IECON), Taipei, Taiwan, August 5-9, 1996, pp. Ivii-lxiii.
[240] EN55011: Limits and methods of measurements ofelectromagnetic disturbance characteristics ofindustrial, scientific and medical radio fi-equencyequipment, (Modified version of CISPR 11,equivalent to VDE 0875 Tll)
[241] Voltage Sag Working Group, L. Conrad, Chairman,“Proposed Chapter 9 for Predicting Voltage Sags(Dips) in Revision to IEEE Std. 493”, IEEE Trans.Industry Applications, Vol. 30, no. 3, pp. 05-821,May/June 1994.
[242] Jonsson, Ragnar, "Method and apparatus forcontrolling an AC induction motor by indirect
measurement of the air-gap voltage" US Patent5294876, Mar. 15, 1994
[243] R. Jonsson, “Natural Field Orientation (NFO)Provides Sensorless Control of AC Induction ServoMotors”, PCIM, June 1995, pp 44-51.
[244] P. J. Lawrenson et al: "Variable speed switchedreluctance motors", u Proc. Inst. Elec. Eng., July1980, pp. 253-365.
[245] T. J. E. Miller and M. McGilp, "Nonlinear theory ofthe switched reluctance motor for rapid computer-aided design," in IEE Proc., vol. 137, pt. B, no. 6, pp.337-347, Nov. 1990.
[246] Lj. Peri}, V. Vu~kovi}, S. Vukosavi},"Stabilization ofswitched reluctance drive operating without positionsensor," EDS Conf. , Italy 90 pp. 215-220, 1990.
[247] Mile Bo`i}, "Projektovanje strujnog regulatoratrofaznog motora zasnovano na rekonstrukciji faznihstruja iz detektovane struje me|ukola pogonskogpretvara~a", magistarski rad, Elektrotehni~ki fakultetu Beogradu, 1997.
[248] Peter Vas, “Parameter Estimation, ConditionMonitoring, and Diagnosis of Electrical Machines”,Oxford Science Publications, 1993.
[249] Veran Vasi}, " Analiza efekata mrtvog vremena nastabilnost frekvencijski regulisanog elektromotornogpogona sa asinhronim motorom ", magistarski rad,Elektrotehni~ki fakultet u Beogradu, 1996.
[250] I. Nagy, “Improved current controller for PWMinverter drives with the background of chaoticdynamics”, Proc. of IECON 1994, pp. 561-566
[251] A. Kusko, “Impact of power electronics on design ofelectric motors and generators”, Dec 15, 1981, UTCMeeting on Motors and Generators
[252] Prof. Peter J. Lawrenson, SRDL-Emerson Electric,“SR motor drives”, presentation at the PowerConversion and Intelligent Motion 1995.
[253] “Filtering noisy frequency inverters”, publication ofSchafner Elektronik, Karlsrue, Germany, 1995.
[254] “Driveguard product”, ABB Drives AG, Switzerland,PCIM Europe, March/April 1991, pp 74-75
[255] T. A. Lipo, P.C. Krause; "Stability analysis of arectifier-inverter induction motor drive", IEEE Trans.on Power Apparatues and Systems, vol. PAS-88, pp.55-66, January, 1969.
[256] R. Ueda, T. Sonoda , S. Takata; "Experimental resultsand their simplified analysis on instability problemsin PWM inverter induction motor drives", IEEETrans. on Industry Applicaton, vol. IA-25, pp. 86-95,January/February, 1989.
[257] S. G. Jeong, M.H. Park; “The analysis andcompensation of dead-time effects in PWMinverters”, IEEE Trans. on Industrial Electronics,vol. IE-38, pp. 108-114, April 1991.
[258] J. W. Choi, S.I. Yong, S.K. Sul;” Inverter outputvoltage synthesis using novel dead timecompensation", IEEE Trans. on Power Electronics,vol. IE-11, pp. 221-227, 1996.
[259] J.W.Choi, S.K. Sul; "A new compensation strategyreducing voltage/current distortion in PWM VSIsystems operating with low output voltages", IEEETrans. on Industry Applications, vol. IA-31, pp.1001-1008, September/October, 1995.
[260] V.A.K. Temple: "MOS controlled thyristors - a newclass of, power devices", IEEE Trans. on ElectronicDevices, vol ED 33, No 10, pp. 1609-1618
[261] “Using the TR Protocol”, Teknic Inc, 214 AndrewsStreet, Rochester, New York, NY 14604, 1996.