spatial reasoning with guinness references acknowledgements university of missouri, columbia, mo
TRANSCRIPT

Spatial Reasoning with GuinnessSpatial Reasoning with Guinness
References
Acknowledgements
University of Missouri, Columbia, MO

THE STARTING ARCHITECTURE
mapserver
SRserver
posecontinuouslocalization
speech
PDA(NRL)
robot
palm
help
er
sensor data
corrections
oldest short term map
robot pose robo
t po
se
user commandsand responses
enco
ders
sens
or in
fo
speechcommands
trulla
vfh
shorttermmap
longtermmap
robot cmds
palmserver
GUI(EUT)
gesture

THE CURRENT ARCHITECTURE
imageserver
mapserver
SRserver
robot_spatial
posecontinuouslocalization
speech
PDA(MU)
robot
Cor
tex
sensor data
sens
or d
ata
robo
t cm
dscorrections
oldest short term map
user commandsand responses
robot pose robo
t po
se
user commandsand responses
enco
ders
sens
or in
fo
speechcommands
trulla
vfh
shorttermmap
longtermmap
robot cmds
sketchlog files
sketchlog files
GUI(EUT)
gesture
spatialview

THE PLANNED ARCHITECTURE
imageserver
mapserver
SRserver
spatialbehaviors
obstacleavoidance
posecontinuouslocalization
speech
robot
Cor
tex
sensor data sens
or d
ata
robo
t cm
ds
corrections
oldest short term map
user commandsand responses
SR &map info
robot pose robo
t po
se
user commandsand responses
enco
ders
sens
or in
foquery & label
speechcommands
sketchdirectives& feedback
robot commands
trulla
vfh
shorttermmap
longtermmap
GUI(EUT)
gesture
PDA(MU)

User: How many objects do you see?Robot: I am sensing four objects.User: Object 2 is a table.User: Describe the scene.Robot: There are objects on my front right.
The object number 4 is mostly in front of me. The table is behind me.
User: Go behind the table.
Behind the table
SRserverSRserver

betweenbetween object 1 and object 2 object 1 and object 2
using the midpoint between closest points
using the midpoint between centroids
using the CFMD
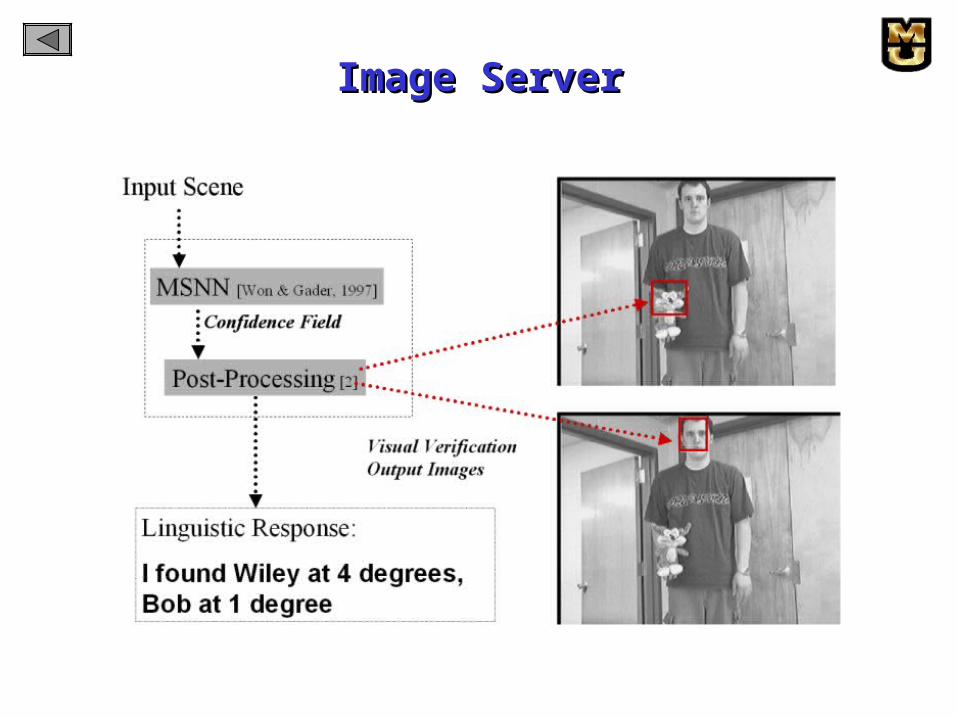
Image ServerImage Server

PATH DESCRIPTION GENERATED FROM THE SKETCHED ROUTE MAP1. When table is mostly on the right and door is mostly to the rear (and close) Then
Move forward2. When chair is in front or mostly in front Then Turn right3. When table is mostly on the right and chair is to the left rear Then Move forward4. When cabinet is mostly in front Then Turn left5. When ATM is in front or mostly in front Then Move forward6. When cabinet is mostly to the rear and tree is mostly on the left and ATM is mostly
in front Then Stop
Understanding Sketched Route MapsUnderstanding Sketched Route Maps

[1] M. Skubic, P. Matsakis, G. Chronis and J. Keller, "Generating Multi-Level Linguistic Spatial Descriptions from Range Sensor Readings Using the Histogram of Forces", Autonomous Robots, Vol. 14, No. 1, Jan., 2003, pp. 51-69.
[2] M. Skubic, D. Perzanowski, S. Blisard, A. Schultz, W. Adams, M. Bugajska and D. Brock “Spatial Language for Human-Robot Dialogs,” IEEE Transactions on SMC, Part C, to appear in the special issue on Human-Robot Interaction.
[3] M. Skubic, S. Blisard, C. Bailey, J.A. Adams and P. Matsakis, "Qualitative Analysis of Sketched Route Maps: Translating a Sketch into Linguistic Descriptions," IEEE Transactions on SMC Part B, to appear.
[4] G. Chronis and M. Skubic, “Sketch-Based Navigation for Mobile Robots,” In Proc. of the IEEE 2003 Intl. Conf. on Fuzzy Systems, May, 2003, St. Louis, MO.
[5] G. Scott, J.M. Keller, M. Skubic and R.H. Luke III, “Face Recognition for Homeland Security: A Computational Intelligence Approach,” In Proc. of the IEEE 2003 Intl. Conf. on Fuzzy Systems, May, 2003, St. Louis, MO.
ReferencesReferences

From left to right George Chronis, Grant Scott, Dr. Marge Skubic, Matt Williams,
Craig Bailey, Bob Luke, Charlie Huggard and Sam Blisard Missing: Dr. Jim Keller
Guinness and GangGuinness and Gang

Sketch-Based NavigationSketch-Based Navigation
The sketched route mapThe robot traversing the sketched route

Sketch-Based NavigationSketch-Based Navigation
The digitized sketched route map
The robot traversing the sketched route

Sketch-Based NavigationSketch-Based Navigation
The digitized sketched route map
The robot traversing the sketched route

This work has been supported by ONR and the U.S. Naval Research Lab. Natural language understanding is accomplished using a system developed by NRL, called Nautilus [Wauchope, 2000]. We also want to acknowledge the help of Dr. Pascal Matsakis.
AcknowledgementsAcknowledgements

NRL’s Multimodal Robot InterfaceNRL’s Multimodal Robot Interface