snamp spatial team integration team...
TRANSCRIPT

5/1/14
1
SNAMP SPATIAL TEAM!Integration Team Meeting"
May 1 2014"
Spatial Team Members UC Merced
•! Qinghua Guo (PI)
•! Wenkai Li *
•! Hong Yu *
•! Jacob Flanagan *
•! Yanjun Su *
* augmented with other funds
UC Berkeley
•! Maggi Kelly (PI)
•! Stefania Di Tommaso
Past Members
•! Marek Jakubowski - graduated
•! Feng Zhao – former postdoc
•! Celia Garcia-Feced ** - former visiting student
•! Sam Blanchard ** - former staff
** Visitors/no cost to SNAMP

5/1/14
2
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
Spatial Team IT Webinar Outline !"#$%&'()$*)$+ %% !"(%% ,-.*%
=*,';$*0#".0;4*(42*>00 1/!2*0?;'@*(0 ABCBB0D0ABCAB0E4*(42*>0;F09@*01%#6#,0'@#%9*(0;F09@*001357:0G"#,0(*%;(90 07#8820?*,,-00 0ABCAB0D0ABCHB0
E4*(42*>0;F09@*01357:0I2.#(0';$%;"*"9C0</!6G'#6;"J0';,,*'6;"J0'@#,,*"8*!0#".0!/(%(2!*!0
07#8820?*,,-0 0ABCHB0K0ABCLM0
NO*DP02"9(;./'6;"09;09@*0I2.#(09*'@"2Q/*0 R2"8@/#0S/;0 0ABCLM0K0ABCTM000
I2.#(0#,8;(29@$!0F;(0*U9(#'6"80F;(*!90%#(#$*9*(!0N9(**0@*28@9J0VWXJ0'#";%-0';4*(J0I5YJ0F/*,J0*9'&P0
R2"8@/#0S/;0 ABCTM0K0AACBB0
I2.#(0#,8;(29@$!0F;(0$#%%2"804*8*9#6;"09-%*!0 R2"8@/#0S/;0 AACBB0K0AACAM0Z!*0;F0I2.#(0%(;./'9!02"01357:02"9*8(#6;"0N>#9*(J0G!@*(J0
F;(*!90G(*J0#".0@*#,9@P007#8820?*,,-0 AACAM0K0AACLB0
I2.#(0I*!!;"!0I*#("*.00 07#8820?*,,-0 AACLB0KAACMB0=(#%D/%0#".0*4#,/#6;"0 1/!2*0?;'@*(0 AACMB0K0AHCBB0
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
Webinar Outline •! Overview of the Spatial chapter of the SNAMP final
report - Maggi Kelly! •! Overview of the SNAMP Lidar component: justification,
collection, challenges and surprises -!Maggi Kelly •! (Re-) introduction to the Lidar technique -!Maggi Kelly •! Lidar algorithms for extracting forest parameters (tree
height, DBH, canopy cover, LAI, fuel, etc.) - Qinghua Guo
•! Lidar algorithms for mapping vegetation types - Qinghua Guo
•! Use of Lidar products in SNAMP integration (water, fisher, forest fire, and health) -!Maggi Kelly
•! Lidar Lessons Learned -!Maggi Kelly

5/1/14
3
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
Webinar Outline •! Overview of the Spatial chapter of the SNAMP final
report - Maggi Kelly! •! Overview of the SNAMP Lidar component: justification,
collection, challenges and surprises -!Maggi Kelly •! (Re-) introduction to the Lidar technique -!Maggi Kelly •! Lidar algorithms for extracting forest parameters (tree
height, DBH, canopy cover, LAI, fuel, etc.) - Qinghua Guo
•! Lidar algorithms for mapping vegetation types - Qinghua Guo
•! Use of Lidar products in SNAMP integration (water, fisher, forest fire, and health) -!Maggi Kelly
•! Lidar Lessons Learned -!Maggi Kelly
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
Spatial Team Chapter of SNAMP Final Report
/ %0)$1(23'4()%5 %6#$#%6*7'1-84()%
59/ %:#7*%6#$#%595 %;-6<=%>%;-?"$%6*$*'4()%#)2%=#)?-)?%59@ %A-*B2%6#$#%
@ %C*$"(27%@9/ %C#-)%;-2#1%D1(23'$7E%6FCG%6FCG%HIC%@95 %,(8(?1#8"-'%81(23'$7%@9@ %;-2#1%C*$1-'7 %%@9J %A(1*7$%7$13'$31*%81(23'$7%@9K %L*?*$#4()%C#87 %%
J %=*73B$7 %%J9/ %C#-)%;-2#1%D1(23'$7E%6FCG%6FCG%HIC%J95 %,(8(?1#8"-'%81(23'$7 %%J9@ %;-2#1%C*$1-'7 %%J9J %A(1*7$%7$13'$31*%81(23'$7 %%J9K %L*?*$#4()%C#87 %%
K %6-7'377-()0
M %=*7(31'*N78*'-O'%.#)#?*.*)$%-.8B-'#4()7%#)2%1*'(..*)2#4()7%
M9/ %H(.8#1-7()%P*$Q**)%B-2#1%#)2%(84'#B%-.#?*1R%M95 %;-2#1%'"#BB*)?*7%%M9@ %;-)S7%Q-$"%Q-B2B-T*%M9J %H(7$%(T%;-2#1 %%M9K %6#$#%'()7-2*1#4()7%Q-$"%;-2#1%
U %=*T*1*)'*7 %%V %<88*)2-'*7 %%
V9/ %<88*)2-W%<E%:#7*%X0F%6#$#%%V95 %<88*)2-W%:E%FY<CD%F8#4#B%,*#.%D3PB-'#4()7 %%V9@ %<88*)2-W%:E%F8#4#B%,*#.%Y*Q7B*Z*17 %%
%>%;-?"$%6*$*'4()%#)2%=#)?-)?%
%D1(23'$7E%6FCG%6FCG%HIC%,(8(?1#8"-'%81(23'$7%
A(1*7$%7$13'$31*%81(23'$7%L*?*$#4()%C#87
%D1(23'$7E%6FCG%6FCG%HIC%,(8(?1#8"-'%81(23'$7
A(1*7$%7$13'$31*%81(23'$7L*?*$#4()%C#87
M =*7(31'*N78*'-O'%.#)#?*.*)$%-.8B-'#4()7%#)2%1*'(..*)2#4()7%
M9/ H(.8#1-7()%P*$Q**)%(84'#B%-.#?*1R%M95 ;-2#1%'"#BB*)?*7M9@ ;-)S7%Q-$"%Q-B2B-T*%M9J H(7$%(T%;-2#1M9K 6#$#%'()7-2*1#4()7%Q-$"%
U =*T*1*)'*7V <88*)2-'*7
V9/ <88*)2-W%<E%:#7*%X0F%6#$#V95 <88*)2-W%:E%FY<CD%F8#4#B%,*#.%D3PB-'#4()7V9@ <88*)2-W%:E%F8#4#B%,*#.%Y*Q7B*Z*17

5/1/14
4
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
Webinar Outline •! Overview of the Spatial chapter of the SNAMP final
report - Maggi Kelly! •! Overview of the SNAMP Lidar component: justification,
collection, challenges and surprises -!Maggi Kelly •! (Re-) introduction to the Lidar technique – Maggi Kelly •! Lidar algorithms for extracting forest parameters (tree
height, DBH, canopy cover, LAI, fuel, etc.) - Qinghua Guo
•! Lidar algorithms for mapping vegetation types - Qinghua Guo
•! Use of Lidar products in SNAMP integration (water, fisher, forest fire, and health) -!Maggi Kelly
•! Lidar Lessons Learned -!Maggi Kelly
Spat
ial S
calin
g in
the
Rese
arch

5/1/14
5
We are evaluating forest fuel treatment impact on fire, wildlife, water quality and quantity in a BACI design: Before, After, Control, Implementation
Spatial Scale •! Each team will perform their research at a specific
scale: •! Fire & Forest Health team works at the scale of the
individual tree, to the forest stand, to the fireshed… •! Wildlife teams work at the scale of the individual tree and its
environs to the scale of an animal s home range… •! Water team works at the scale of the watershed… •! Public Participation works at local and national scales.
•! Spatial models will be used to integrate across teams, and extrapolate results in a common spatial framework Sp
atia
l Sca
ling
in th
e Re
sear
ch
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
Planning 2007 2006 2005
February 2005 MOU Signed by UC, USFS, USFWS & CA Resources Agency
March 2005 UCST & MOUP initiate planning process to develop SNAMP
April 15, 2005 SNAMP proposal completed
December 9, 2005 First SNAMP Public Meeting
January 20, 2006 Public Comment Website Launch
February – December 2006 SNAMP Workplan reviewed by MOUP, Public, & Peer Review ; Study Sites are chosen
January 16, 2007 Revised SNAMP Workplan Posted
July 2 & Nov. 11, 2006 SNAMP Public meetings with UCST & MOUP
Data Collection & Analysis Synthesis, Integration
Inception
2012 2011 2010 2009 2008 2007
Wildlife, Water, PPT data collection continues
Pre-treatment Data Collection
Pre-Treatment
LiDAR flight: Sugar Pine
Water & Fisher begin data collection; LiDAR flight: Last Chance; Owl Study Area expands to include Eldorado
Public Outreach & Mutual Learning
2013 2014
2012 2011
Wildlife, Water, PPT data
Treatment
Public Outreach & Mutual Learning
2015 +
......
Adaptive management adjustments to policy due to research findings will be discussed and implemented by USFS
Post-Treatment Reporting
Wildlife, Water, PPT data Wildlife, Water, PPT data ...... LiDAR flight: Sugar Pine
Data Collection & Analysis Data Collection & Analysis
Public Outreach & Mutual Learning Public Outreach & Mutual Learning
LiDAR flight: Last Chance
SNAMP Timeline
5/1/14
6
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
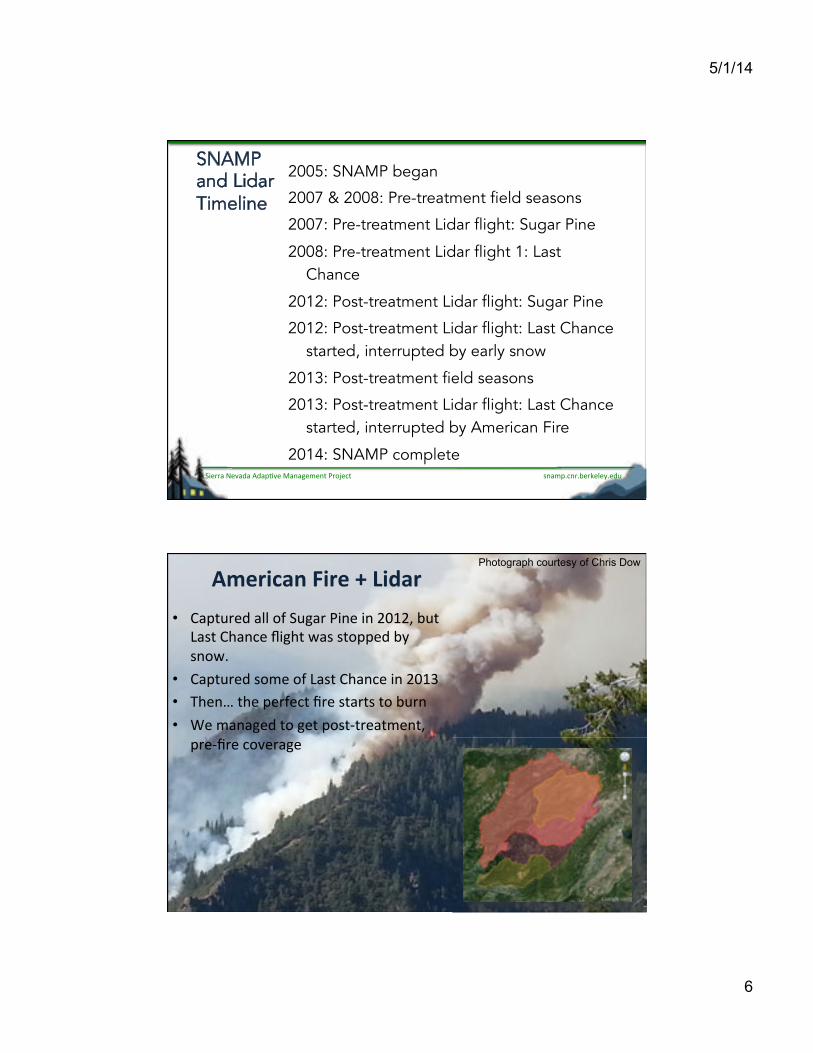
SNAMP and Lidar Timeline
2005: SNAMP began
2007 & 2008: Pre-treatment field seasons
2007: Pre-treatment Lidar flight: Sugar Pine
2008: Pre-treatment Lidar flight 1: Last Chance
2012: Post-treatment Lidar flight: Sugar Pine
2012: Post-treatment Lidar flight: Last Chance started, interrupted by early snow
2013: Post-treatment field seasons
2013: Post-treatment Lidar flight: Last Chance started, interrupted by American Fire
2014: SNAMP complete
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
<.*1-'#)%A-1*%[%;-2#1%•! [#%9/(*.0#,,0;F01/8#(0:2"*02"0HBAHJ0)/90
I#!90[@#"'*0\28@90>#!0!9;%%*.0)-0!";>&00
•! [#%9/(*.0!;$*0;F0I#!90[@#"'*02"0HBAL0•! ]@*"^09@*0%*(F*'90G(*0!9#(9!09;0)/("0•! =*0$#"#8*.09;08*90%;!9D9(*#9$*"9J0
%(*DG(*0';4*(#8*0
Photograph courtesy of Chris Dow

5/1/14
7
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
:;!9D9(*#9$*"9J0:(*DG(*0I2.#(05'Q/2!26;"0
2012 Flight 2013 Flight
5$*(2'#"0_2(*0:*(2$*9*(0
Pre-Treatment collection (117km2): •! Sept 2007 •! Cost: $77,000 Post-Treatment collection: •! Nov 2012 •! Cost: $77,000
Pre-Treatment collection (107km2): •! Sept 2008 •! Cost: $70,000 Post-Treatment collection: •! Nov 2012 •! Aug 2013 •! Cost: $70,000
SNAMP Lidar Information Common Discrete Lidar specs: 4 range measurements per pulse Scan frequency: 40-45 Hz Pulse rate frequency: 70-100 KHz Divergence angle: 0.25 mrad Flying height: 600-800 m Footprint: 15 to 20 cm Wavelength: 1064 nm 4-10 cm elevation accuracy Footprint size: ~20 cm Swath width: ~510 m ~10 points/m2 Acquisition cost: ~ $650/km2, $6.5/ha, $2.6/acre Contracted with National Center for Airborne Laser Mapping (NCALM;) All surveys used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) mounted in a twin-engine Cessna Skymaster.
Last Chance Area
Sugar Pine Area
specs:

5/1/14
8
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
Webinar Outline •! Overview of the Spatial chapter of the SNAMP final
report - Maggi Kelly! •! Overview of the SNAMP Lidar component: justification,
collection, challenges and surprises -!Maggi Kelly •! (Re-) introduction to the Lidar technique – Maggi Kelly •! Lidar algorithms for extracting forest parameters (tree
height, DBH, canopy cover, LAI, fuel, etc.) - Qinghua Guo
•! Lidar algorithms for mapping vegetation types - Qinghua Guo
•! Use of Lidar products in SNAMP integration (water, fisher, forest fire, and health) -!Maggi Kelly
•! Lidar Lessons Learned -!Maggi Kelly
Optical Remote Sensing: the View from Overhead
^7EVY10000000000000000000000000000000000000000000000I#".!#900000000000000000000000000000000000E(9@;%@;9;8(#%@-&&&0&&A+$0 0 0 0000000000 0LB$0 0 0 0 0 0 0A$&&0
16

5/1/14
9
Optical Remote Sensing: the View from Overhead
•! [#";%-0';4*(0•! `*8*9#6;"0%(;./'6429-0
9@(;/8@06$*0•! :@*";,;8-0•! `28;(0#".0@*#,9@0•! `*8*9#6;"0%#a*("2"80
•! ^>29@0!-";%6'0#".0(*82;"#,0!'#,*0';4*(#8*0
17
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
^W/90>29@0;%6'#,0(*$;9*0!*"!2"8J0>*0'#"b908*90$/'@0#);/909@*04*(6'#,0!9(/'9/(*02"0F;(*!9!^0
18

5/1/14
10
Introduction to Lidar
Image modified from Lefsky et al. 2004 with tree graphic from globalforestscience.org.
Lidar = Light Detection and Ranging
Range. The measurement of the speed which a pulse of light returns to a sensor is converted to elevation above sea level.
R = "(tc) •! R = range
•! t = time
•! c = speed of light
LiDAR = Light Detection And Ranging
20

5/1/14
11
Dis
cret
e Li
dar y
ield
s m
ultip
le re
turn
s
first returns
second returns
third returns
last returns
all returns
last returns
all returns
21
Waveform Lidar
Image source: Pirotti, F. (2011). Analysis of full-waveform LiDAR data for forestry applications: a review of investigations and methods. iForest-Biogeosciences and Forestry, 4(3), 100.

5/1/14
12
23
SNAMP Field Data
Height, DBH, Species, Vigor (class), Crown class, HTLCB; Shrub Species, % cover, Height; Fuel: 1-, 10-, 100-, 1000-hour fuels, Litter, Duff layer. Other: LAI, Canopy cover (tube sightings), Coarse woody debris, Ladder fuel measurements
Height, DBH, Species, Vigor (class), Crown class, HTLCB; Shrub Species, % cover, Height; Fuel: 1-, 10-, 100-, 1000-hour fuels, Litter, Duff layer. Other: LAI, Canopy

5/1/14
13
The lidar deliverable
The lidar deliverable
26
NCALM standard products Raw LIDAR data in LAS or ASCII format •! All returns, unfiltered X, Y, Z, •! Return intensity, •! Scan angle, and •! GPS time data
Filtered LIDAR X, Y, Z (LAS or ASCII) DEM & DSM

5/1/14
14
Digital Surface
Model
Digital Terrain
Model
Individual Trees
Lidar Data Products
DTM – Digital Terrain Model •! Elevation information about
bare-earth surface without the influence of vegetation or man-made features
Individual Trees
Canopy Height
Model
CHM – Canopy Height Model •! Height information about
vegetation features with elevation removed
DSM – Digital Surface Model •! Elevation information about all
features in the landscape, including vegetation, buildings and other structures
Individual Trees •! Isolated from the point cloud,
containing location, height, diameter
27
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
Webinar Outline •! Overview of the Spatial chapter of the SNAMP final
report - Maggi Kelly! •! Overview of the SNAMP Lidar component: justification,
collection, challenges and surprises -!Maggi Kelly •! (Re-) introduction to the Lidar technique – Maggi Kelly •! Lidar algorithms for extracting forest parameters (tree
height, DBH, canopy cover, LAI, fuel, etc.) - Qinghua Guo
•! Lidar algorithms for mapping vegetation types - Qinghua Guo
•! Use of Lidar products in SNAMP integration (water, fisher, forest fire, and health) -!Maggi Kelly
•! Lidar Lessons Learned -!Maggi Kelly

5/1/14
15
DEM products for both sites DEM completed for both sites: Publication looking at methodology for DEM creation (Guo et al, 2010),
based on different algorithms, topography, lidar sampling, density, pixel size.
Guo, Q., W. Li, H. Yu, and O. Alvarez. 2010. Effects of Topographic Variability and Lidar Sampling Density on Several DEM Interpolation Methods. Photogrammetric Engineering & Remote Sensing 76:701-712.
1/8#(0:2"*0 I#!90[@#"'*0
29
Forest Attribute Estimation and Assessment
Lidar Product List (20m):
Mean Height
Max Height
Diameter at Breast Height (DBH)
Height to Live Canopy Base (HTLCB)
Canopy Cover
Leaf area index (LAI)
Individual trees
Tree density
Tree size classes
Canopy fuel
Biomass
Sugar Pine Last Chance Sugar Pine

5/1/14
16
Vegetation Analysis: Lidar Metrics
5th
50th
95th
List of lidar metrics Height:
minimum mean maximum standard deviation skewness kurtosis quadratic mean
Percentiles:
0.01, 0.05, 0.10…0.99
Total number of returns Maximum foliage profile density Point density:
0 - .5 m, 0.5 – 1m…55 - 60m
There are about 30-40 commonly used lidar metrics.
Vegetation return
Ground return
Laser pulses
Gap Fraction (GP) = nground / (nvegetation + nground)
LAIe = - cos( ) ! ln(GF) / k : zenith angle (scan angle) k: extinction coefficient (0.5)
Richardson et al., 2009
Some of these measures are inferred from regression, some are direct measurements, or calculations

5/1/14
17
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
Webinar Outline •! Overview of the Spatial chapter of the SNAMP final
report - Maggi Kelly! •! Overview of the SNAMP Lidar component: justification,
collection, challenges and surprises -!Maggi Kelly •! (Re-) introduction to the Lidar technique – Maggi Kelly •! Lidar algorithms for extracting forest parameters (tree
height, DBH, canopy cover, LAI, fuel, etc.) - Qinghua Guo
•! Lidar algorithms for mapping vegetation types - Qinghua Guo
•! Use of Lidar products in SNAMP integration (water, fisher, forest fire, and health) -!Maggi Kelly
•! Lidar Lessons Learned -!Maggi Kelly
Data Used for Vegetation Mapping
Lidar data •! Lidar metric data: 0%, 1%, 5%,…,99%, 100% •! Canopy cover •! Tree height •! Topography data: DEM, Slope, Aspect
Aerial imagery - NAIP •! Band information: Green, Red, NIR band. •! Texture information: Mean, Standard
Deviation, Homogeneity, Contrast, Dissimilarity, Entropy, Second Moment.
Plot Data •! 377 and 408 circular plots (12.62 m radius) at
Sugar Pine site and Last Chance site, respectively.
Plot Data
Lidar data
Aerial imagery - NAIP

5/1/14
18
Vegetation Mapping Procedure
Pixel-based Vegetation Mapping Result
Vegetation group determination and accuracy assessment
• Post-hoc analysis • Permutation test
Vegeta4on Class Leaf Area Index
Basal Area
Lorrey Height
Canopy Cover Eleva4on Vegeta4on composi4on
m2/ m2 m2 / ha m % m Open Pine-‐oak
forest 1.9 11.4 12.2 14.7 1,614 open pine-‐oak forest
Pine-‐cedar forest 3.9 19.8 17.6 38.1 1,518 ponderosa pine, incense cedar dominated forest
Mature Mixed Conifer 4.4 47.3 25.3 66.8 1,578
white-‐fir/cedar/ponderosa pine -‐-‐ mature mixed conifer
Closed-‐canopy Mixed Conifer 4.1 68.0 32.4 74.6 1,632
white-‐fir/cedar/sugar pine tall -‐-‐ dense mixed conifer
Open True FirPine Forest
Cedar Forest
Young Mixed Conifer
Mature Mixed Conifer
Primary Axis (E=0.27)
Seco
ndar
y Ax
is (E
= 0
.20)
VegClassOpen True FirPine ForestCedar ForestYoung Mixed ConiferMature Mixed Conifer
Primary axis
Seco
ndar
y ax
is
Vegetation Class Open True Fir Pine Forest Cedar Forest Young Mixed Conifer Mature Mixed Conifer

5/1/14
19
Pixel-based Vegetation Mapping Results
Sugar Pine
Last Chance
Object-based Vegetation Mapping Result
Vegetation map segments: Sugar Pine Vegetation map segments: Sugar Pine

5/1/14
20
Vegetation Change Detection Procedure
Iterative threshold selection method (Fung & LeDrew, 1988) •! The threshold value of mean canopy difference ± n standard deviations was
iteratively selected to obtain candidate “change” areas.
•! The n value was increased with an increment of 0.1 at each step until it reached 2.0. The corresponding threshold of n which produced the highest change detection accuracy was used as the threshold to separate the changed and unchanged areas.
Treatment detection method •! The treatment attribute for each polygon was determined by the majority of the
treatment attribute of the pixels within it.
•! Polygons with an area smaller than 800 m2 were removed. Finally, the remained treated polygons were used to cut the treated pixels and obtain the pixel-based forest treatment detection result.
Vegetation Change Detection Results: Last Chance
•! Accuracy assessment •! We compared our lidar
forest treatment detection with field measurements.
•! Total Accuracy: 95.66%. •! Kappa Coefficient: 0.78.
Predicted results
Treated Untreated
Treated 33 12
Untreated 4 320
Treated (polygons from USFS) Changed (from Lidar) Unchanged
Fiel
d m
easu
red Treated Untreated Untreated Untreated
Treated 33 12 12
Untreated 4 320 320

5/1/14
21
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
Webinar Outline •! Overview of the Spatial chapter of the SNAMP final
report - Maggi Kelly! •! Overview of the SNAMP Lidar component: justification,
collection, challenges and surprises -!Maggi Kelly •! (Re-) introduction to the Lidar technique – Maggi Kelly •! Lidar algorithms for extracting forest parameters (tree
height, DBH, canopy cover, LAI, fuel, etc.) - Qinghua Guo
•! Lidar algorithms for mapping vegetation types - Qinghua Guo
•! Use of Lidar products in SNAMP integration (water, fisher, forest fire, and health) -!Maggi Kelly
•! Lidar Lessons Learned -!Maggi Kelly
SNAMP Lidar Products and Cross-team Integration
Lidar Product List:
DEM
Mean Height
Max Height
Diameter at Breast Height (DBH)
Height to Live Canopy Base (HTLCB)
Canopy Cover
Leaf area index (LAI)
Individual trees
Tree density
Tree size classes
Canopy fuel
Biomass
Canopy Cover
DEM
Mean Height
Max Height
Diameter at Breast Height (DBH)
Height to Live Canopy Base (HTLCB)
Canopy Cover
FFEH: Fire behavior models (e.g. Farsite) Fmodels (e.g.

5/1/14
22
Lidar Product List:
DEM
Mean Height
Max Height
Diameter at Breast Height (DBH)
Height to Live Canopy Base (HTLCB)
Canopy Cover
Leaf area index (LAI)
Individual trees
Tree density
Tree size classes
Canopy fuel
Biomass
Canopy Cover
Leaf area index (LAI)
FFEH: Fire behavior models (e.g. Farsite)
Water: Hydrological modeling (e.g. Ressys) modeling (e.g.
Mean Height
DEM models (e.g.
modeling (e.g.
SNAMP Lidar Products and Cross-team Integration
Lidar Product List:
DEM
Mean Height
Max Height
Diameter at Breast Height (DBH)
Height to Live Canopy Base (HTLCB)
Canopy Cover
Leaf area index (LAI)
Individual trees
Tree density
Tree size classes
Canopy fuel
Biomass
Canopy Cover Canopy Cover
FFEH: Fire behavior models (e.g. Farsite)
Water: Hydrological modeling (e.g. Ressys)
Owl: nest tree characterization
Individual trees
SNAMP Lidar Products and Cross-team Integration

5/1/14
23
Lidar Product List:
DEM
Mean Height
Max Height
Diameter at Breast Height (DBH)
Height to Live Canopy Base (HTLCB)
Canopy Cover
Leaf area index (LAI)
Individual trees
Tree density
Tree size classes
Canopy fuel
Biomass
Canopy Cover Canopy Cover
FFEH: Fire behavior models (e.g. Farsite)
Water: Hydrological modeling (e.g. Ressys)
Owl: nest tree characterization
Fisher: Species distribution modeling,
den tree characterization Individual trees
DEM
Mean Height
Max Height modeling (e.g.
SNAMP Lidar Products and Cross-team Integration
Lidar Product List:
DEM
Mean Height
Max Height
Diameter at Breast Height (DBH)
Height to Live Canopy Base (HTLCB)
Canopy Cover
Leaf area index (LAI)
Individual trees
Tree density
Tree size classes
Canopy fuel
Biomass
FFEH: Fire behavior models (e.g. Farsite)
Water: Hydrological modeling (e.g. Ressys)
Owl: nest tree characterization
Fisher: Species distribution modeling,
den tree characterization
Public Participation: Maps
DEM
Mean Height
Max Height
Diameter at Breast Height (DBH)
Height to Live Canopy Base (HTLCB)
Canopy Cover
Leaf area index (LAI)
Individual trees
Tree density
Tree size classes
Canopy fuel
Biomass
SNAMP Lidar Products and Cross-team Integration

5/1/14
24
Spat
ial P
ublic
atio
ns
•! SNAMP PUB #4: Guo, et al. 2010. Effects of topographic variability and lidar sampling density on several DEM interpolation methods. PERS 76(6): 701–712.
•! SNAMP PUB #5: Garcia-Feced, et al. 2011. LiDAR as a tool to characterize wildlife habitat: California spotted owl nesting habitat as an example. JF 108(8): 436-443.
•! SNAMP PUB #6: Li, et al. 2012. A new method for segmenting individual trees from the lidar point cloud. PERS 78(1): 75-84.
•! SNAMP PUB #7: Blanchard, et al. 2011. Object-Based Image Analysis of Downed Logs in Disturbed Forested Landscapes using Lidar. RS 3: 2420-2439. Spatial Team.
•! SNAMP PUB #13: Jakubowski, et al. 2013. Predicting surface fuel models and fuel metrics using lidar and CIR imagery in a dense, mountainous forest. PERS. 79(1): 37-49.
•! SNAMP PUB #14: Zhao, et al. 2012. Allometric equation choice impacts lidar-based forest biomass estimates: A case study from the Sierra National Forest, CA. AFM 165: 64– 72.
•! SNAMP PUB #16: Zhao, et al. 2012. Characterizing habitats associated with fisher den structures in southern Sierra Nevada forests using discrete return lidar. FEM. 280: 112–119.
•! SNAMP PUB #18: Jakubowski, Guo, and Kelly. 2013. Tradeoffs between lidar pulse density and forest measurement accuracy. RSE 130: 245–253.
•! SNAMP PUB #24: Jakubowski, M. J., W. Li, Q. Guo, and M. Kelly. 2013. Delineating individual trees from lidar data: a comparison of vector- and raster-based segmentation approaches. RS, 5: 4163-4186.
The focus of SNAMP Integration is through the vegetation maps the vegetation maps
Sugar Pine
Last Chance

5/1/14
25
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
_,;>0;F02"9*8(#6;"0%(;./'9!0)*9>**"09*#$!0Plot field data from
FFEH
Raw lidar data from NCALM
NAIP imagery
from USDA
Processed lidar data
To Spatial To Spatial To Spatial
To Spatial and FFEH
Lidar-derived
vegetation map
Vegetation polygon map with up-scaled
plot data
To FFEH Fire modeling
based on vegetation
map
Spatially explicit
vegetation metrics from fire model
To Wildlife
To Water
To FFEH
Water integration
metrics
Fisher and Owl
integration metrics
Forest Ecosystem
Health integration
metrics
Integrated, multi-resource
assessment
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
Webinar Outline •! Overview of the Spatial chapter of the SNAMP final
report - Maggi Kelly! •! Overview of the SNAMP Lidar component: justification,
collection, challenges and surprises -!Maggi Kelly •! (Re-) introduction to the Lidar technique – Maggi Kelly •! Lidar algorithms for extracting forest parameters (tree
height, DBH, canopy cover, LAI, fuel, etc.) - Qinghua Guo
•! Lidar algorithms for mapping vegetation types - Qinghua Guo
•! Use of Lidar products in SNAMP integration (water, fisher, forest fire, and health) -!Maggi Kelly
•! Lidar Lessons Learned -!Maggi Kelly

5/1/14
26
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
SNAMP Lidar Lessons Learned
1.! Lidar is great for mapping forest structure. But what about if you don’t have it? Or need to work back in time?
2.! There are challenges with Lidar, especially discrete lidar –! understory
3.! Links with wildlife –! Lidar captures structure, but what do metrics mean in terms of
field data? –! What is a proxy for important structure that can be measured in
the field?
4.! Cost of Lidar: cost of acquisition, cost of analysis. 5.! Density of points, what is needed? 6.! Lidar data can get very large.
Point 1: Forest Attribute Estimation and Assessment Product Lidar Moderate-res
optical (Landsat)
High-res optical (NAIP)
Mean height * Max height *
DBH * * Height to live canopy
base *
Canopy cover Individual trees
Leaf area index (LAI) Tree density Canopy fuel
Biomass *
works works with reservations not possible
* from regression

5/1/14
27
Measuring fire-related forest structure with lidar
Results 1.! fuel types – shrub,
timber-litter, timber-understory - can be predicted reliably using lidar, but
2.! specific surface fuel
models are difficult to predict, and
3.! accuracy of continuous
canopy metrics decreases with lidar penetration into the canopy
Jakubowski, M. K., Q. Guo, B. Collins, S. Stephens, and M. Kelly. 2013. Predicting surface fuel models and fuel metrics using lidar and CIR imagery in a dense, mountainous forest. Photogrammetric Engineering and Remote Sensing 79(1):37-49
Viewing a Virtual Scene in 3D
Point 2: Understory is challenging
SNAMP Waveform Lidar
Waveform lidar might help us with understory, and also with wildlife metrics
Northern site lidar footprint
2012 lidar coverage – discrete + waveform
2008 lidar coverage – discrete return
Image source: Pirotti, F. (2011). Analysis of full-waveform LiDAR data for forestry applications: a review of investigations and methods. iForest-Biogeosciences and Forestry, 4(3), 100.

5/1/14
28
Point 3: Links with wildlife
–! Lidar captures structure, but what do metrics mean in terms of field data?
–! What is a proxy for important structure that can be measured in the field?
5th
50th
95th
We get good correlation between lidar metrics on structure and wildlife presence (e.g. Fisher den trees), but what does this mean for managers? What can a manager “see” and aim for in the forest? What does it mean that we get a statistical relationship between “kurtosis of heights” and fisher den trees? We need a better field and lidar derived proxy variable for structure.
Point 4: Lidar vs other imagery costs
•! Two published studies present costs: –! Wulder et al. (2008) estimated a cost of $3/ha (~$1.2/acre) for
mapping with low density (1pl/m2) discrete Lidar data. –! Wynne (2006) estimated lidar collection, field collection and
analysis would cost $83/acre ($34/ha).
•! SNAMP: –! ~10pt/m2 => $6/ha, $650/km2, $2.5/acre
•! Let’s compare with Landsat: –! In the 1980s Landsat cost $2 - $3/ha to create vegetation maps
(adjusted to 2000 dollars) –! In 2000, Landsat cost $0.30-$0.40/ha to create vegetation maps:
Franklin et al. (2000).

5/1/14
29
Lidar pulse density
depending on flying height, discrete return
lidar can yield pulse densities of 1-12
pulses/m2.
Point 5: How much is enough?
How much is enough? How dense does lidar data have to be for management goals? Or what happens when your site burns before you complete lidar acquisition?
Point 5: How much is enough?

5/1/14
30
From: Jakubowski, et al. 2013. Tradeoffs between lidar pulse density and forest measurement accuracy. Remote Sensing of Environment.
Accuracy is fairly consistent between 1 and 10 pulse/m2, for plot-scale forest metrics
Point 6: How do we represent a forest stand?
Forest Stand size: 5 ha (12.35 acres) Optical Imagery: Landsat TM (30m): 55 pixels (330 bytes) Landsat ETM (15m)*: 222 pixels (1.3 kb) SPOT (10m): 500 pixels (2 Kb) IKONOS (1m): 50,000 pixels (390 Kb)
Lidar Data: Lidar (1pl/m2) (4 returns): 200,000 points (5Mb)** Lidar (10 pl/m2) (4 returns): 2,000,000 points (50Mb)**
Details of forest stand coverage from a number of typical remote sensing sources, modified from Wulder et al. (2012).
* panchromatic or pan-sharpened. ** Lidar file sizes are approximate, and vary with compression format.
(330 bytes)
2,000,000 points (50Mb)**
Details of forest stand coverage from a number of typical remote sensing
** Lidar file sizes are approximate, and vary with compression format.

5/1/14
31
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
SNAMP data availability and website curation
We will transfer immediately all the spatial data to the USFS server after the completion of project, and our spatial server (snamp.ucmerced.edu) will be maintained for one more year after the project finishes.
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
Spatial Team IT Webinar Outline !"#$%&'()$*)$+ %% !"(%% ,-.*%
=*,';$*0#".0;4*(42*>00 1/!2*0?;'@*(0 ABCBB0D0ABCAB0E4*(42*>0;F09@*01%#6#,0'@#%9*(0;F09@*001357:0G"#,0(*%;(90 07#8820?*,,-00 0ABCAB0D0ABCHB0
E4*(42*>0;F09@*01357:0I2.#(0';$%;"*"9C0</!6G'#6;"J0';,,*'6;"J0'@#,,*"8*!0#".0!/(%(2!*!0
07#8820?*,,-0 0ABCHB0K0ABCLM0
NO*DP02"9(;./'6;"09;09@*0I2.#(09*'@"2Q/*0 R2"8@/#0S/;0 0ABCLM0K0ABCTM000
I2.#(0#,8;(29@$!0F;(0*U9(#'6"80F;(*!90%#(#$*9*(!0N9(**0@*28@9J0VWXJ0'#";%-0';4*(J0I5YJ0F/*,J0*9'&P0
R2"8@/#0S/;0 ABCTM0K0AACBB0
I2.#(0#,8;(29@$!0F;(0$#%%2"804*8*9#6;"09-%*!0 R2"8@/#0S/;0 AACBB0K0AACAM0Z!*0;F0I2.#(0%(;./'9!02"01357:02"9*8(#6;"0N>#9*(J0G!@*(J0
F;(*!90G(*J0#".0@*#,9@P007#8820?*,,-0 AACAM0K0AACLB0
I2.#(0I*!!;"!0I*#("*.00 07#8820?*,,-0 AACLB0KAACMB0=(#%D/%0#".0*4#,/#6;"0 1/!2*0?;'@*(0 AACMB0K0AHCBB0

5/1/14
32
!"#$%&'"(&)*(+*,*-&*./012*((#03*4#.#05.#%64*07#"#8*$*"90:(;<*'90
Upcoming SNAMP events
May 15, 2014 - Fire and Forest Health Integration Team meeting, McClellan May 30, 2014 - CAM/facilitation workshop, Marysville/Oregon House June 19, 2014 - American Fire field trip, Foresthill/Last Chance June 20, 2014 - CA Spotted Owl Integration Team meeting, Davis June 25, 2014 - CAM/facilitation workshop, Marysville/Oregon House July 31, 2014 - Pacific Fisher Integration Team meeting, Fresno September 4, 2014 - Water Integration Team meeting, Merced November 6, 2014 - final SNAMP Annual meeting, McClellan
More information at http://snamp.cnr.berkeley.edu