slide bg_htdk thuy luc khi nen_sv
TRANSCRIPT

14 August 2012
ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN
GIẢNG VIÊN: ThS.UÔNG QUANG TUYẾN
TRƯỜNG ĐẠI HỌC MỎ - ĐỊA CHẤT
BỘ MÔN TỰ ĐỘNG HOÁ
-----o0o-----
ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 1. KHÁI QUÁT VỀ HỆ THỐNG ĐIỀU KHIỂN THUỶ LỰC - KHÍ NÉN
1.1. Lịch sử phát triển và khả năng ứng dụng của hệ thống truyền độngthủy lực
1920 hệ thống truyền động thuỷ lực đã ứng dụng trong lĩnh vực máy côngcụ.
1925 hệ thống truyền động thuỷ lực được ứng dụng trong nhiều lĩnh vựccông nghiệp khác như: nông nghiệp, máy khai thác mỏ, máy hóa chất, giaothông vận tải, hàng không, ...
1960 đến nay hệ thống truyền động thuỷ lực được ứng dụng trong tự độnghóa thiết bị và dây chuyền thiết bị với trình độ cao, có khả năng điều khiểnbằng máy tính hệ thống truyền động thủy lực với công suất lớn.

3ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 1. KHÁI QUÁT VỀ HỆ THỐNG ĐIỀU KHIỂN THUỶ LỰC - KHÍ NÉN
1.2. Ưu điểm và nhược điểm của hệ thống điều khiển bằng thuỷ lực, khí nén
1.2.1. Ưu điểm
4ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 1. KHÁI QUÁT VỀ HỆ THỐNG ĐIỀU KHIỂN THUỶ LỰC - KHÍ NÉN
1.2.2. Nhược điểm
1.3. Đơn vị đo các đại lượng cơ bản1.3.1. Áp suất (p) Theo đơn vị đo lường SI là Pascal (pa) 1pa= 1N/m2= 1m-1kgs-2= 1kg/ms2
Đơn vị này khá nhỏ, nên người ta thường dùng đơn vị: N/mm2, N/cm2 và so vớiđơn vị áp suất cũ là kg/cm2 thì nó có mối liên hệ như sau: 1kg/cm2= 9,8N/cm2; để dàng tính toán, ta lấy 1kg/cm2= 10N/cm2

5ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 1. KHÁI QUÁT VỀ HỆ THỐNG ĐIỀU KHIỂN THUỶ LỰC - KHÍ NÉN
Ngoài ra ta còn dùng: 1bar = 105N/m2= 1kg/cm2= 1bar.
1.3.2. Vận tốc (v): Đơn vị vận tốc là m/s (cm/s). 1.3.3. Thể tích và lưu lượng
a. Thể tích (V): m3hoặc lít(l) b. Lưu lượng(Q): m3/phút hoặc l/phút.
Trong cơ cấu biến đổi năng lượng dầu ép (bơm dầu, động cơ dầu) cũng có thể dùng đơn vị là m3/vòng hoặc l/vòng.
1.3.4. Lực (F): Đơn vị lực là Newton (N) 1N = 1kg.m/s2.
1.3.5. Công suất (N): Đơn vị công suất là Watt (W)
6ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
2.1. Máy bơm và động cơ dầu
2.1.1. Nguyên lý chuyển đổi năng lượng
a. Bơm dầu:
b. Động cơ dầu:
7ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
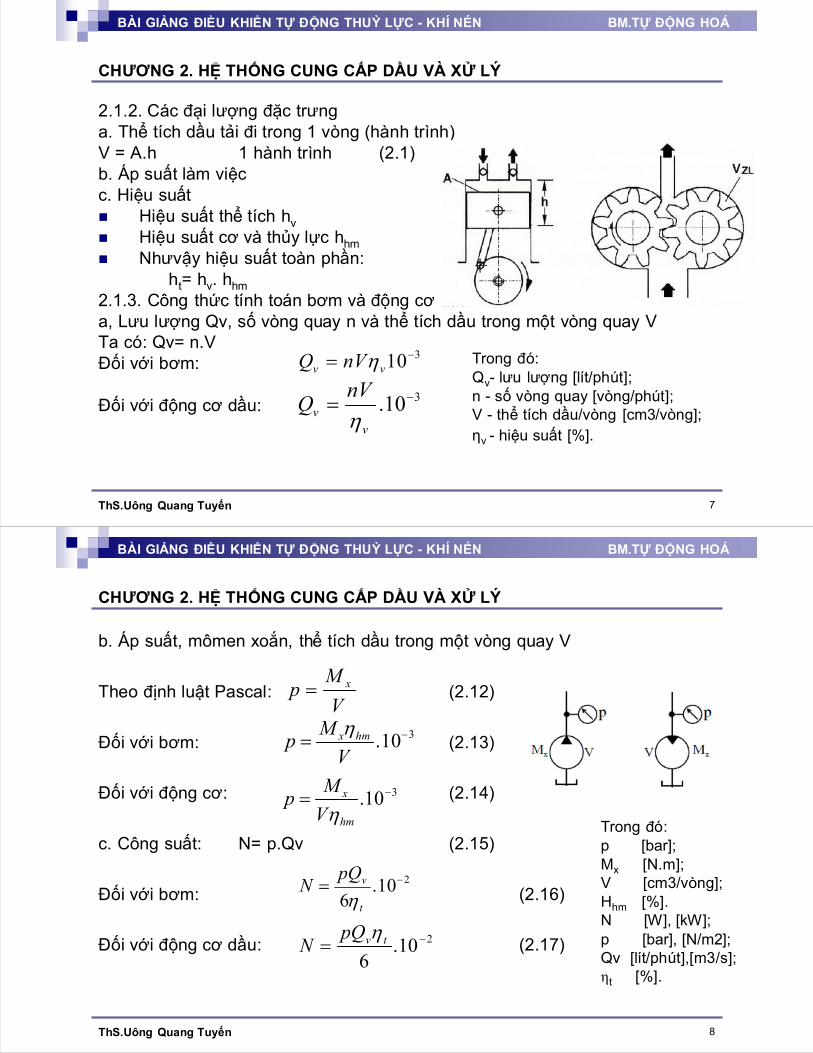
2.1.2. Các đại lượng đặc trưnga. Thể tích dầu tải đi trong 1 vòng (hành trình)V = A.h 1 hành trình (2.1) b. Áp suất làm việcc. Hiệu suất Hiệu suất thể tích hv
Hiệu suất cơ và thủy lực hhm
Nhưvậy hiệu suất toàn phần: ht= hv. hhm
2.1.3. Công thức tính toán bơm và động cơ dầua, Lưu lượng Qv, số vòng quay n và thể tích dầu trong một vòng quay VTa có: Qv= n.VĐối với bơm:
Đối với động cơ dầu:
310 vv nVQ
310. v
v
nVQ
Trong đó:Qv- lưu lượng [lít/phút];n - số vòng quay [vòng/phút]; V - thể tích dầu/vòng [cm3/vòng];
ηv - hiệu suất [%].
8ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
b. Áp suất, mômen xoắn, thể tích dầu trong một vòng quay V
Theo định luật Pascal: (2.12)
Đối với bơm: (2.13)
Đối với động cơ: (2.14)
c. Công suất: N= p.Qv (2.15)
Đối với bơm: (2.16)
Đối với động cơ dầu: (2.17)
V
Mp x
310. V
Mp hmx
310. hm
x
V
Mp
210.6
t
vpQN
210.6
tvpQN
Trong đó: p [bar]; Mx [N.m]; V [cm3/vòng]; Ηhm [%].N [W], [kW];
p [bar], [N/m2]; Qv [lít/phút],[m3/s]; ηt [%].

9ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
2.1.4. Các loại bơm
a. Bơm với lưu lượng cố định
+
+
+
+
+
+
+
b. Bơm với lưu lượng thay đổi
+
+
+
+
10ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
Bơm bánh răng: (Hình 2.7. Bơm bánh răng)
Bơm trục vít: (Hình 2.9. Bơm trục vít)

11ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
Bơm cánh gạt đơn
Bơm cánh gạt kép
Bơm pittông: hướng trục và hướng kính
12ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
2.2. Bể dầu (Hình 2.20. Bể dầu)
2.2.1. Nhiệm vụ: Bể dầu có nhiệm vụ chính sau:
1. Động cơ điện
2. Ống nén3. Bộ lọc4. Phía hút5. Vách ngăn6. Phía xả7. Mắt dầu8. Đổ dầu
9. Ống xả.
Kí hiệu

13ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
2.3. Bộ lọc dầu
2.3.1. Nhiệm vụ
Kí hiệu
2.3.2. Phân loại theo kích thước lọc Tùy thuộc vào kích thước chất bẩn có thể lọc được, bộ lọc dầu có thểphân thành các loại sau:
a. Bộ lọc thô:có thể lọc những chất bẩn đến 0,1mm. b. Bộ lọc trung bình:có thể lọc những chất bẩn đến 0,01mmc. Bộ lọc tinh: có thể lọc những chất bẩn đến 0,005mmd. Bộ lọc đặc biệt tinh:có thể lọc những chất bẩn đến 0,001mm.
14ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
2.3.3. Phân loại theo kết cấu
a, Bộ lọc lưới
b, Bộ lọc lá, sợi thủy tinh
2.3.4. Cách lắp bộ lọc trong hệ thống
Hình 2.24. Cách lắp bộ lọc trong hệ thốnga.b.c.

15ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
2.4. Đo áp suất và lưu lượng
2.4.1. Đo áp suất ( Hình 2.25)
a. Đo áp suất bằng áp kế lò xo Nguyên lý đo áp suất bằng áp kế lò xo: dưới tác dụng của áp lực, lò xo bịbiến dạng, qua cơ cấu thanh truyền hay đòn bẩy và bánh răng, độ biến dạng của lò xo sẽ chuyển đổi thành giá trị được ghi trên mặt hiện số.
b. Nguyên lý hoạt động của áp kế lò xo tấm (Hình 2.26)Dưới tác dụng của áp suất, lò xo tấm (1) bị biến dạng, qua trục đòn bẩy (2), chi tiết hình đáy quạt (3), chi tiết thanh răng (4), kim chỉ (5), giá trị áp suất được thể hiện trên mặt số.
16ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
2.4.2. Đo lưu lượng
a. Đo lưu lượng bằng bánh hình ôvan vàbánh răng (Hình 2.27)
b. Đo lưu lựơng bằng tuabin và cánh gạt (Hình 2.28)Chất lỏng chảy qua ống làm quay cánh tuabin và cánh gạt, độ lớn lưu lượng được xác định bằng tốc độ quay của cánh tuabin và cánh gạt.

17ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
c. Đo lưu lượng theo nguyên lý độ chênh áp (Hình 2.29)
Hai áp kế được đặt ở hai đầu của màng ngăn, độ lớn lưu lượng được xác định bằng độ chênh lệch áp suất (tổn thất áp suất) trên hai áp kế p1và p2.
d. Đo lưu lượng bằng lực căng lò xo (Hình 2.30)
Chất lỏng chảy qua ống tác động vào đầu đo, trên đầu đo có gắn lò xo, lưu chất chảy qua lưu lượng kế ít hay nhiều sẽ được xác định qua kim chỉ.
18ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
2.5. Bình trích dầu
2.5.1. Nhiệm vụ
2.5.2. Phân loại
Theo nguyên lý tạo ra tải, bình trích chứa thủy lực được chia thành ba loại, thể hiện ở hình 2.31
Hình 2.31. Các loại bình
trích chứa thủy lực a. Bình trích chứa trọng vật; b. Bình trích chứa lò xo; c. Bình trích chứa thủy khí; d. Ký hiệu.

19ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 2. HỆ THỐNG CUNG CẤP DẦU VÀ XỬ LÝ
- Quá trình nạp (Hình 2.33)
- - Quá trình xả (Hình 2.34)
20ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.1. Khái niệm
3.1.1. Hệ thống điều khiển
Hệ thống điều khiển bằng thủy lực được mô tả qua sơ đồ hình 3.1, gồm các cụm và phần tử chính, có chức năng sau:
a. Cơ cấu tạo năng lượng:bơm dầu, bộ lọc (...) b. Phần tử nhận tín hiệu: các loại nút ấn (...) c. Phần tử xử lý: van áp suất, van điều khiển từxa (...) d. Phần tử điều khiển: van đảo chiều (...) e. Cơ cấu chấp hành: xilanh, động cơ dầu. Hình 3.1. Hệ thống điều khiển bằng thủy lực

21ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.1.2. Sơ đồ cấu trúc hệ thống điều bằng thủy lực
Cấu trúc hệ thống điều khiển bằng thủy lực được thể hiện ở sơ đồ hình 3.2
Hình 3.2. Cấu trúc thống điều khiển bằng thủy lực
22ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.2. Van áp suất
3.2.1. Nhiệm vụ:
Van áp suất dùng để điều chỉnh áp suất, tức là cố định hoặc tăng, giảm trịsố áp trong hệ thống điều khiển bằng thủy lực.
3.2.2. Phân loại: Van áp suất gồm có các loại sau:
3.2.2.1. Van tràn và an toàn
Ký hiệu của van tràn và van an toàn

23ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
(a)
(b)
(c)
+ Kiểu van bi (trụ, cầu) (hình 3.3)+ Kiểu con trượt (pittông) (hình 3.4)+ Van điều chỉnh hai cấp áp suất (phối hợp) (hình 3.5)
24ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.2.2.2. Van giảm áp
Hình 3.6 Kết cấu và ký hiệu Hình 3.7 Mạch thuỷ lực có lắp van giảm áp
25ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
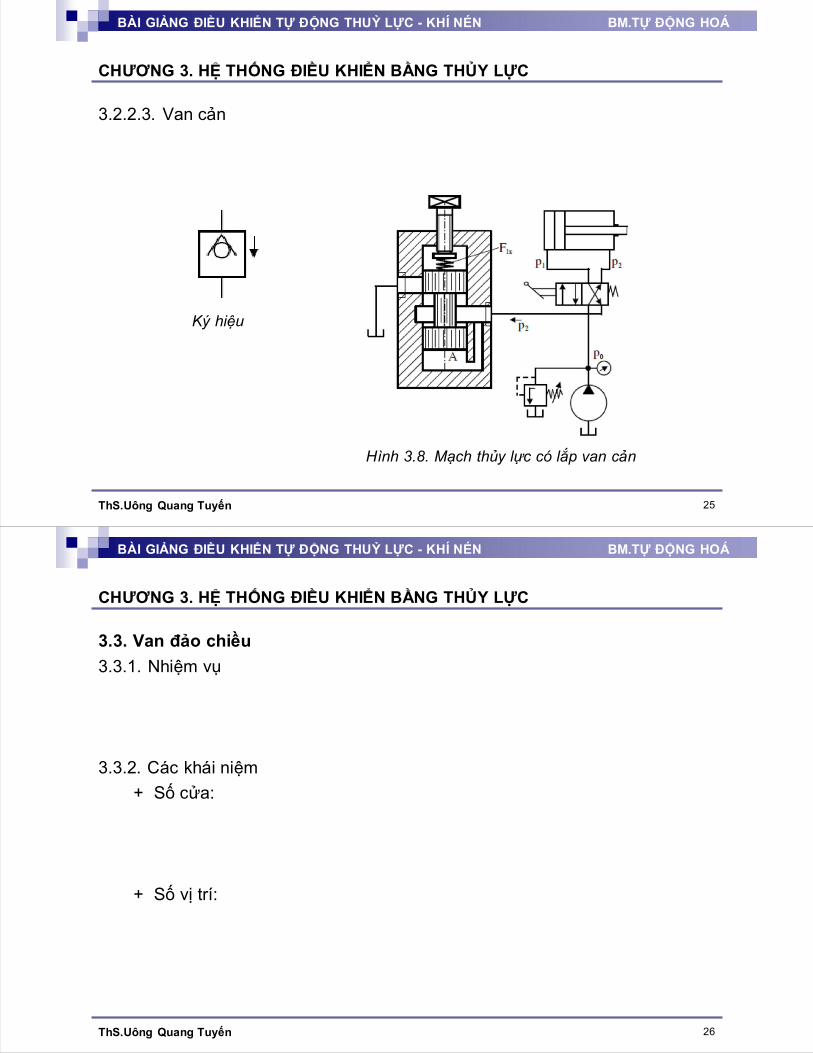
3.2.2.3. Van cản
Hình 3.8. Mạch thủy lực có lắp van cản
Ký hiệu
26ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.3. Van đảo chiều
3.3.1. Nhiệm vụ
3.3.2. Các khái niệm
+ Số cửa:
+ Số vị trí:

27ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.3.3. Nguyên lý làm việc
a. Van đảo chiều cửa, vị trí
Hình 3.9. Van đảo chiều
P - Cửa nối bơm;
T - Cửa nối ống xả vềthùng dầu; A, B - Cửa nối với cơ
cấu điều khiển hay cơ cấu chấp hành; L - Cửa nối ống dầu thừa về thùng.
28ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
b. Van đảo chiều cửa, vị trí
Hình 3.10. Van đảo chiều
P - Cửa nối bơm;
T - Cửa nối ống xả vềthùng dầu; A, B - Cửa nối với cơ
cấu điều khiển hay cơ cấu chấp hành; L - Cửa nối ống dầu thừa về thùng.

29ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
c. Van đảo chiều cửa, vị trí
Hình 3.11. Van đảo chiều
P - Cửa nối bơm;
T - Cửa nối ống xả vềthùng dầu; A, B - Cửa nối với cơ
cấu điều khiển hay cơ cấu chấp hành; L - Cửa nối ống dầu thừa về thùng.
30ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.3.4. Các loại tín hiệu tác động
Loại tín hiệu tác động lên van đảo chiều được biểu diễn hai phía, bên trái và bên phải của ký hiệu. Có nhiều loại tín hiệu khác nhau có thể tác động làm van đảo chiều thay đổi vị trí làm việc của nòng van đảo chiều.
Hình 3.12. Các ký hiệu cho tín hiệu tác động bằng tay
Hình 3.13. Các ký hiệu cho tín hiệu tác động bằng cơ

31ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.3.5. Các loại mép điều khiển của van đảo chiều
Khi nòng van dịch chuyển theo chiều trục, các mép của nó sẽ đóng hoặc mở các cửa trên thân van nối với kênh dẫn dầu.
Van đảo chiều có mép điều khiển dương (hình 3.14a), được sử dụng trong những kết cấu đảm bảo sự rò dầu rất nhỏ, khi nòng van ở vị trí trung gian hoặc ở vị trí làm việc nào đó, đồng thời độ cứng vững của kết cấu (độ nhạy đối với phụ tải) cao.
Van đảo chiều có mép điều khiển âm (hình 3.14b), đối với loại van này cómất mát chất lỏng chảy qua khe thông về thùng chứa, khi nòng van ở vị trítrung gian. Loại van này được sử dụng khi không có yêu cầu cao về sự rò chất lỏng, cũng nhưđộ cứng vững của hệ.
Van đảo chiều có mép điều khiển bằng không (hình 3.14c), được sử dụng phần lớn trong các hệ thống điều khiển thủy lực có độ chính xác cao (ví dụ nhưở van thủy lực tuyến tính hay cơ cấu servo. Công nghệ chế tạo loại van này tương đối khó khăn.
32ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
Hình 3.14. Các loại mép điều khiển của van đảo chiều a. Mép điều khiển dương; b. Mép điều khiển âm; c. Mép điều khiển bằng không.
3.4. Van tiết lưu
Van tiết lưu có hai loại:
Van tiết lưu cố định Van tiết lưu thay đổi được lưu lượng

33ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.5. Bộ ổn tốc
Bộ ổn tốc là cấu đảm bảo hiệu áp không đổi khi giảm áp (Dp = const), và do đó đảm bảo một lưu lượng không đổi chảy qua van, tức là làm cho vận tốc của cơ cấu chấp hành có giá trị gần nhưkhông đổi.
Nhưvậy để ổn định vận tốc ta sử dụng bộ ổn tốc.
Bộ ổn tốc là một van ghép gồm có: một van giảm áp và một van tiết lưu. Bộổn tốc có thể lắp trên đường vào hoặc đường ra của cơ cấu chấp hành như ở van tiết lưu, nhưng phổ biến nhất là lắp ở đường ra của cơ cấu chấp hành.
Hình 3.29. Ký hiệu và kết cấu bộ ổn tốc
34ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.6. Van Chặn
Van chặn gồm các loại van sau:
3.6.1. Van một chiều
Van một chiều dùng để điều khiển dòng chất lỏng đi theo một hướng, và ở hướng kia dầu bị ngăn lại.
Trong hệ thống thủy lực, thường đặt ở nhiều vị trí khác nhau tùy thuộc vào những mục đích khác nhau.
van bi, van kiểu con trượt
Hình 3.31. Ký hiệu và kết cấu van bi một chiều

35ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
Ứng dụng của van một chiều:
Đặt ở đường ra của bơm (để chặn dầu chảy về bể).
Đặt ở cửa hút của bơm (chặn dầu ở trong bơm).
Khi sử dụng hai bơm dầu dùng chung cho một hệ thống.
Hình 3.32. Sơ đồ mạch thủy lực sử dụng hai bơm dầu nhằm giảm tiêu hao công suất
36ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.6.2. Van một chiều điều khiển được hướng chặn
a. Nguyên lý hoạt động
Hình 3.33. Van một chiều điều khiển được hướng chặn a. Chiều A qua B, tác dụng nhưvan một chiều; b. Chiều B qua A có dòng chảy, khi có tác dụng tín ngoài X; c. Ký hiệu.

37ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.6.3. Van tác động khoá lẫn
a. Nguyên lý hoạt động
Hình 3.34. Van tác động khóa lẩn a. Dòng chảy từ A1 qua B1 hoặc từ A2 qua B2 (như van một chiều); b. Từ B2về A2thì phải có tín hiệu điều khiển A1; c. Ký hiệu.
38ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.7. Điều khiển, điều chỉnh áp suất và lưu lượng
3.7.1. Các phương pháp điều chỉnh vận tốc Điều chỉnh vận tốc chuyển động thẳng hoặc chuyển động vòng của cơ cấu chấp
hành trong hệ thống dầu ép, bằng cách thay đổi lưu lượng dầu chảy qua nó với haiphương pháp sau đây:
Thay đổi sức cản trên đường ống dẫn dầu bằng van tiết lưu. Phương pháp điềuchỉnh này gọi là điều chỉnh bằng tiết lưu, đã trình bày trong mục van tiết lưu.
Thay đổi chế độ làm việc của bơm dầu, tức là điều chỉnh lưu lượng của bơm cungcấp cho hệ thống dầu ép. Phương pháp điều chỉnh này gọi là điều chỉnh bằng thểtích.
Lựa chọn phương pháp điều chỉnh vận tốc phụ thuộc vào nhiều yếu tố như công suấttruyền động, áp suất cần thiết, đặc điểm thay đổi tải trọng, kiểu và đặc tính của bơmdầu...
Để giảm nhiệt độ của dầu, đồng thời tăng hiệu suất của hệ thống dầu ép, người tasử dụng phương pháp điều chỉnh vận tốc bằng thể tích. Loại điều chỉnh này đượcthực hiện bằng cách chỉ đưa vào hệ thống dầu ép lưu lượng dầu cần thiết để đảmbảo một vận tốc nhất định. Do đó, nếu như không tính đến tổn thất thể tích và cơ khíthì toàn bộ năng lượng do bơm dầu tạo nên đều biến thành công có ích.

39ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.7.2. Một số phương pháp điều chỉnh
a, Điều chỉnh áp suất bằng cơ khí
b, Điều chỉnh áp suất bằng van tràn
c, Điều chỉnh bằng tiết lưu đầu vào
d, Điều chỉnh bằng tiết lưu đầu ra
e, Điều chỉnh lưu lượng kết hợp với điều chỉnh áp suất của bơm
40ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
3.7. Xi lanh truyền động
3.7.1. Nhiệm vụ
Xilanh thủy lực là cơ cấu chấp hành dùng để biến đổi thế năng của dầuthành cơ năng, thực hiện chuyển động thẳng.
3.7.2. Phân loại
Xilanh thủy lực được chia làm hai loại: xilanh lực và xilanh quay (hay còngọi là xilanh mômen).
Trong xilanh lực, chuyển động tương đối giữa pittông với xilanh là chuyểnđộng tịnh tiến.
Trong xilanh quay, chuyển động tương đối giữa pittông với xilanh là chuyểnđộng quay (với góc quay thường nhỏ hơn 3600).
Pittông bắt đầu chuyển động khi lực tác động lên một trong hai phía của nó(lực đó thể là lực áp suất, lực lò xo hoặc cơ khí) lớn hơn tổng các lực cảncó hướng ngược lại chiều chuyển động (lực ma sát, thủy động, phụ tải, lòxo,...).

41ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
Phân loại theo cấu tạo
Xilanh đơn
Xilanh kép
Xilanh đơn lùi về nhờ ngoại lực Xilanh đơn lùi về nhờ lò xo
Lùi về bằng thuỷ lực Lùi về bằng thuỷ lực có giảm chấn
42ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
Xilanh vi sai
Tác dụng cả hai phía Tác dụng quay
Tác dụng đơn Tác dụng kép

43ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 3. HỆ THỐNG ĐIỀU KHIỂN BẰNG THỦY LỰC
Theo kiểu lắp ráp
Lắp chặt thân
Lắp chặt mặt bích
Lắp xoay được
Lắp gá ở 1 đầu xilanh
3.7.3. Cấu tạo xilanh
Hình 2.15. Cấu tạo
xilanh tác dung kép có cần pittông một phía
1. Thân; 2. Mặt bích hông; 3.Mặt bích hông; 4. Cần pittông; 5. Pittông; 6. Ổ trượt; 7. Vòng chắn dầu; 8. Vòng đệm;
9. Tấm nối; 10. Vòng chắn hình O; 11. Vòng chắn pittông;
12. Ống nối; 13. Tấm dẫn hướng; 14. Vòng chắn hình O; 15. Đai ốc; 16. Vít vặn; 17. Ống nối.
44ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
4.1. Mục đích
Trong hệ thống điều khiển bằng thuỷ lực, phần lớn các phần tử do nhà chếtạo sản xuất ra và có những yêu cầu về thong số kỹ thuật được xác định, được tiêu chuẩn hoá.
Mục đích của chương 4 là vận dụng những kiến thức của các chươngtrước ứng dụng vào hệ thống điều khiển bằng thuỷ lực. Học viên cần nắmvững nguyên lý làm việc, tính toán cách chọn các phần tử thuỷ lực, đọchiểu sơ đồ lắp đặt của hệ thống thuỷ lực, để có thể làm tốt công việc lắpráp, vận hành, theo dõi, bảo dưỡng và thay thế các phần tử thuỷ lực.
Dưới đây giới thiệu một số hệ thống điều khiển bằng thuỷ lực điển hìnhtrong các máy và thiết bị công nghiệp. Các hệ thống điều khiển bằng thuỷlực điển hình được trình bày từ đơn giản đến phức tạp.

45ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
Hình 4.1. Giới hạn áp suất làm việc trong hệ thốngA, Qua van tràn cho chuyển động thẳngB, Qua van tràn cho chuyển động quayC, Tải trọng thay đổi
46ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
4.2. Các sơ đồ điển hình
Để giới hạn áp suất làm việc trong hệ thống điều khiển bằng thuỷ lực, cóthể thực hiện theo các sơ đồ lắp đặt ở hình 4.1
Trong khi hệ thống điều khiển bằng thuỷ lực làm việc không liên tục, nhưngbơm hoạt động liên tục; để tránh quá trình nhiệt sinh ra lớn khi qua van tràn, người ta lắp van đảo chiều 4/3, ở vị trí trung gian dầu sẽ trở về bể dầumà không cần qua van tràn, hình 4.2a; hoặc lắp và hệ thống van đảo chiều2/2, hình 4.2b; hoặc van đảo chiều 6/3, hình 4.2c

47ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
Hình 4.2. Giới hạn nhiệt sinh ra trong hệ thốngA, Qua vị trí trung gian của van đảo chiềuB, Qua van đảo chiều 2/2C, Qua van đảo chiều 6/3
48ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
Để áp suất hay lưu lượng trong hệ thống điều khiển luôn được ổn định, mặc dù khi bơm mất điện, người ta lắp vào hệ thống bình trích chứa, hình 4.3a. Khi cơ cấu chấp hành chạy không với vận tốc lớn, nhưng khi chạy làm việc chỉcần áp suất lớn, lưu lượng nhỏ, người ta lắp theo hình 4.3b.
Trong công nghiệp người ta cũng hay sử dụng hộp truyền động bằng thuỷlực: gồm động cơ dầu và bơm dầu lắp chung vào thành một khối. Như vậy tổn thất thể tích và tổn thất áp suất của hệ thống sẽ giảm đi, hình 4.4.

49ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
Hình 4.3. Duy trì áp suất và thay đổi lưu lượng trong hệ thốngA, Lắp thêm bình trích chứaB, Lắp 2 bơm: 1 bơm có lưu lượng lớn, 1 bơm có áp suất lớn
50ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
Hình 4.4. Hộp truyền động bằng thuỷ lực1, Bơm phụ; 2, Van một chiều; 3,5,6, Van tràn; 4, Van đảo chiều
51ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
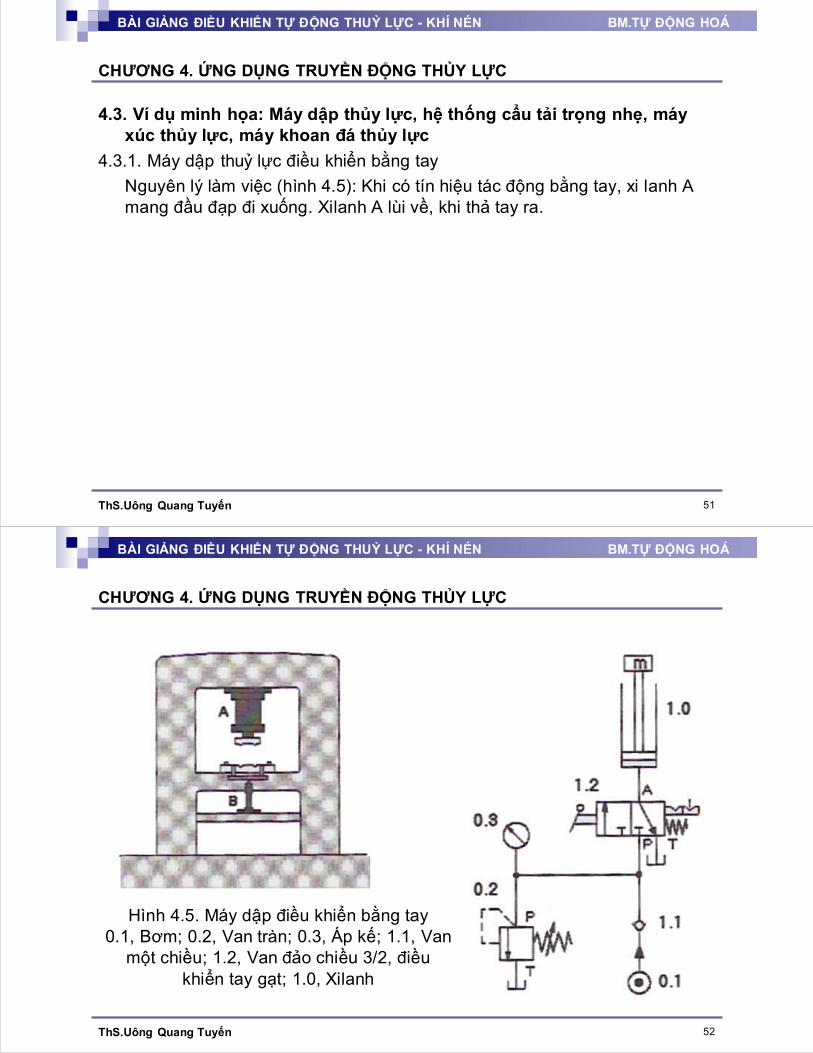
4.3. Ví dụ minh họa: Máy dập thủy lực, hệ thống cẩu tải trọng nhẹ, máy xúc thủy lực, máy khoan đá thủy lực
4.3.1. Máy dập thuỷ lực điều khiển bằng tay
Nguyên lý làm việc (hình 4.5): Khi có tín hiệu tác động bằng tay, xi lanh A mang đầu đạp đi xuống. Xilanh A lùi về, khi thả tay ra.
52ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
Hình 4.5. Máy dập điều khiển bằng tay0.1, Bơm; 0.2, Van tràn; 0.3, Áp kế; 1.1, Van
một chiều; 1.2, Van đảo chiều 3/2, điềukhiển tay gạt; 1.0, Xilanh

53ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
4.3.2. Cơ cấu rót tự động cho quy trình công nghệ đúc
A, Nguyên lý làm việc (hình 4.6)
Gàu múc sẽ đi xuống, khi tác động bằng tay. Gàu múc sẽ đi lên, khi thả tay ra
Hình 4.6. Cơ cấu rót tự động trong công nghệ đúc
54ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
B, Sơ đồ mạch thuỷ lực (hình 4.7): Để cho chuyển động của xi lanh, gàu múcđi xuống được êm, ta lắp thêm một van cản 1.2 vào đường xả dầu về, hình4.7b
Hình 4.7. Sơ đồ mạch thuỷ lực cơ cấu rót tự động0.1- Cụm bơm; 0.2- Van tràn; 0.3- Áp kế; 1.1- Van đảo chiều 4/2,
điều khiển bằng tay gạt; 1.2- Van cản; 1.0- Xi lanh.

55ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
4.3.3. Nâng hạ chi tiết được sơn trong lò sấy
A, Nguyên lý làm việc (hình 4.8)
Khi tác động bằng tay, pittong nâng chi tiết lên gần nguồn nhiệt hơn. Khi chi tiết đã được sấy khô, ta tác động bằng tay sang vị trí làm việc khác, chi tiếtđược hạ xuống.
Hình 4.8. Nâng hạ chi tiết được sơn trong lò sấy
56ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
B, Sơ đồ mạch thuỷ lực (hình 4.9)
Để cho chuyển động của xilanh đi xuống được êm và có thể dừng lại vị tríbất kỳ, ta lắp thêm van một chiều điều khiển được hướng chặn 1.2 vàđường nén, hình 4.9b
Hình 4.9. Sơ đồ mạchthuỷ lực nâng hạ chi tiết được sơn trong lòsây0.1- Cụm bơm; 0.2-Van tràn; 1.1- Van đảo chiều 4/3, điềukhiển bằng tay gạt; 1.2- Van một chiềuđiều khiển đượchướng chặn; 1.0-Xilanh

57ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
4.3.4. Cơ câu kẹp chặt chi tiết gia công
A, Nguyên lý làm việc (hình 4.10)
Khi tác động bằng tay, pittong mang hàm di động đi ra, để kẹp chặt chi tiết. Khi gia công xong, thả tay ra pittong lùi về, chi tiết được mở ra.
Hình 4.10. Cơ cấu kẹp chặt chi tiết gia công1. Chi tiết; 2. Hàm kẹp; 3. Xilanh
58ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
B, Sơ đồ mạch thuỷ lực (hình 4.11)
Để cho xilanh chuyển động đi tới kẹp chi tiết với tốc độ chậm, không va đậpvới chi tiết kẹp, ta sử dụng van tiết lưu một chiều. Ở hình 4.11a van tiết lưumột chiều đặt ở đường ra và ở hình 4.11b van tiết lưu một chiều đặt ởđường vào.
Hình 4.11. Sơ đồmạch thuỷ lực cơcấu kẹp chặt chi tiếtgia công0.1- Cụm bơm; 0.2-Van tràn; 0.3- Ápkế; 1.1- Van đảochiều 4/2, điềukhiển bằng tay gạt; 1.2- Van tiết lưumột chiều; 1.0-Xilanh

59ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
4.3.5. Hệ thống cẩu tải trọng nhẹ
A, Nguyên lý làm việc (hình 4.12)
Dây cáp nối móc cẩu và đầu pittong được mắc qua các ròng rọc cố định. Pittong đi ra, móc cẩu tải trọng hạ xuống chậm, khi pittong lùi về, tải trọngđược nâng lên.
Hình 4.12. Hệ thống cẩu tải trọng nhẹ
60ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
B, Sơ đồ mạch thuỷ lực (hình 4.13)
Khi móc cẩu tải trọng hạ xuống chậm, ta sử dụng van tiết lưu một chiều 1.2. Để cho quá trình hạ cẩu có giảm chấn, có đối trọng, ta sử dụng van cản 1.4
Hình 4.13. Sơ đồ mạch thuỷ lựchệ thống cẩu tải trọng nhẹ0.1- Cụm bơm; 0.2- Van tràn; 0.3- Áp kế; 1.1- Van đảo chiều4/2, điều khiển bằng tay gạt; 1.2-Van tiết lưu một chiều; 1.3- Van một chiều; 1.4- Van cản; 1.0-Xilanh
61ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
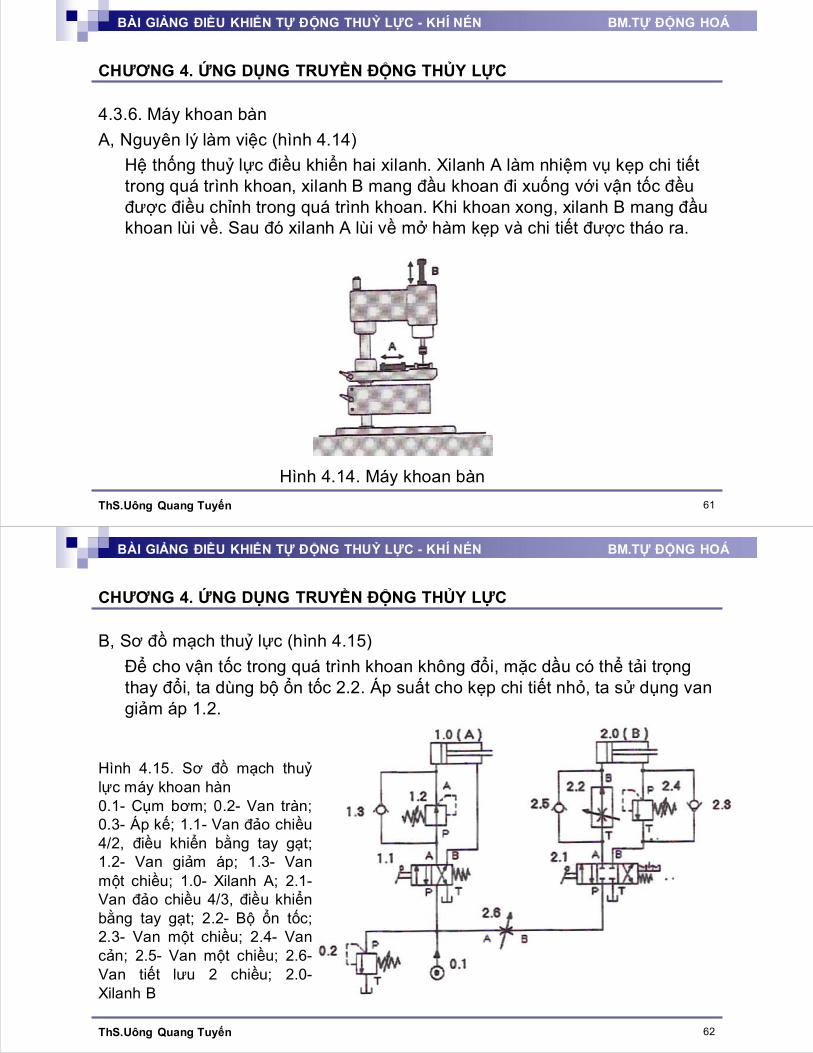
4.3.6. Máy khoan bàn
A, Nguyên lý làm việc (hình 4.14)
Hệ thống thuỷ lực điều khiển hai xilanh. Xilanh A làm nhiệm vụ kẹp chi tiếttrong quá trình khoan, xilanh B mang đầu khoan đi xuống với vận tốc đềuđược điều chỉnh trong quá trình khoan. Khi khoan xong, xilanh B mang đầukhoan lùi về. Sau đó xilanh A lùi về mở hàm kẹp và chi tiết được tháo ra.
Hình 4.14. Máy khoan bàn
62ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
B, Sơ đồ mạch thuỷ lực (hình 4.15)
Để cho vận tốc trong quá trình khoan không đổi, mặc dầu có thể tải trọngthay đổi, ta dùng bộ ổn tốc 2.2. Áp suất cho kẹp chi tiết nhỏ, ta sử dụng van giảm áp 1.2.
Hình 4.15. Sơ đồ mạch thuỷlực máy khoan hàn0.1- Cụm bơm; 0.2- Van tràn; 0.3- Áp kế; 1.1- Van đảo chiều4/2, điều khiển bằng tay gạt; 1.2- Van giảm áp; 1.3- Van
một chiều; 1.0- Xilanh A; 2.1-Van đảo chiều 4/3, điều khiểnbằng tay gạt; 2.2- Bộ ổn tốc; 2.3- Van một chiều; 2.4- Van cản; 2.5- Van một chiều; 2.6-Van tiết lưu 2 chiều; 2.0-Xilanh B

63ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
4.3.7. Máy xúc (hình 4.16)
Trong mạch điều khiển bằng thuỷlực của máy xúc, ta sử dụngbộ điều khiển khoá lẫn, van cản, van một chiều và cụmvan (BLOCK)
Hình 4.16. Mạch thuỷ lực máy xúc
64ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 4. ỨNG DỤNG TRUYỀN ĐỘNG THỦY LỰC
4.3.8. Máy cẩu (hình 4.17)
Trong mạch điều khiểnbằng thuỷ lực của máyxúc, ta sử dụng bộ điềukhiển khoá lẫn, van cản, van một chiều và cụmvan (BLOCK)
Hình 4.17. Mạch thuỷ lực máy cẩu

65ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
5.1. Các phần tử điện
1. Công tắc
Trong kĩ thuật điều khiển, công tắc và nút ấn thuộc các phần tử đưa tínhiệu. Hình 6-1 biểu diễn một số loại công tắc thông dụng. Có 2 loại côngtắc: công tắc đóng-mở (on/off switch) và công tắc chuyển mạch.
Hình 6.1. Công tắca, Công tắc đóng-mở; b, Công tắc chuyển mạch
66ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
2. Nút ấn
Nút ấn đóng-mở biểu diễn ở hình 6-2a. Khi chưa tác động thì chưa có dòngđiện chạy qua, mạch hở; khi có tác động, dòng điện đi qua 3-4
Nút ấn chuyển mạch được biểu diễn và ký hiệu trình bày ở hình 6-2b
Hình 6-2 Nút ấna, Nút ấn đóng-mở; b, Nút ấn chuyển mạch

67ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
3. RơleTrong kỹ thuật điều khiển, rơle như là phần tử xử lý tín hiệu. Có nhiều loạirơle khác nhau, tuỳ theo công dụng. Phần trình bày tiếp theo sẽ giới thiệumột số loại rơle thông dụng, ví dụ như rơle công suất (công tắc tơ), rơleđóng-mở, rơle điều khiển, rơle thời gian.
a, Công tắc tơNguyên lý hoạt động của công tắc tơ được biểu diễn ở hình 6-3. Khi dòngđiện vào cuộn dây cảm ứng, xuất hiện lực điện từ sẽ hút lõi sắt, trên đó cólắp các tiếp điểm. Các tiếp điểm có thể là các tiếp điểm chính để đóng, mởmạch chính và các tiếp điểm phụ để đóng mở mạch điều khiển. Công tắc tơứng dụng cho mạch điện có công suất 1kW-500kW.
Hình 6-3- Công tắc tơ
68ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
b, Rơle điều khiển
Nguyên lý hoạt động của rơle điều khiển cũng tương tự như công tắc tơ(xem biểu diễn và ký hiệu hình 6.4); khác với công tắc tơ ở chỗ là rơle điềukhiển đóng, mở cho những mạch có công suất nhỏ và thời gian đóng, mởcủa các tiếp điểm rất nhỏ (1ms đến 10ms)
Hình 6.4. Rơle điều khiểna, Nguyên lý hoạt động; b, Ký hiệu

69ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
Ký hiệu rơle theo DIN 40 713 biểu diễn ở hình 6.5
Hình 6.5 Ký hiệu rơle điều khiển- K Rơle- A1 Cửa nối với cực dương +- A2 Cửa nối với cực âm -- Tiếp điểm thường mở ký hiệu 3-4- Tiếp điển thường đóng ký hiệu 1-2
70ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
c, Rơle thời gian đóng muộn
Nguyên lý hoạt động của rơle thời gian đóng muộn, xem hình 6.6. Tương tựnhư rơle thời gian đóng muộn của phần tử khí nén, xem [TK-28], điốt tươngtự như van một chiều, tụ điện như bình trích chứa, biến trở R1 như và tiếtlưu. Đồng thời R2 có nhiệm vụ giảm điện áp trên tụ, khi rơle bị ngắt.
Hình 6.6. Rơle thờigian đóng muộna, Sơ đồ nguyên lýlàm việcb, Sơ đồ thời gianđóng muộn của
phần tử khí nénc, Ký hiệu; d, Biểuđồ thời gian

71ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
d, Rơle thời gian nhả muộn
Nguyên lý hoạt động của rơle thời gian nhả muộn, xem hình 6.7. Tương tựnhư rơle thời gian nhả muộn của phần tử khí nén, xem [TK-28], điốt tươngtự như van một chiều, tụ điện như bình trích chứa, biến trở R1 như và tiếtlưu. Đồng thời R2 có nhiệm vụ giảm điện áp trên tụ, khi rơle bị ngắt.
Hình 6.7. Rơle thờigian nhả muộna, Sơ đồ nguyên lýlàm việcb, Sơ đồ thời giannhả muộn củaphần tử khí nénc, Ký hiệu; d, Biểuđồ thời gian
72ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
4. Công tắc hành trình điện - cơ
Nguyên lý hoạt động của công tắc hành trình điện - cơ được biểu diễn ởhình 6.8. Khi con lăn chạm cữ hành trình, thì tiếp điểm (1) nối với (4).
Hình 6.8. Công tắc hành trình điện - cơ

73ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
Cần phân biệt các trường hợp: công tắc hành trình điện - cơ trong mạch đóng, khi chưa có tác động hình 6.9a và công tắc hành trình điện - cơ trong mạchđóng, khi có tác động hình 6.9b
Hình 6.9. Công tắc hành trình điện - cơa, Trạng thái đóng khi không có tác động
b, Trạng thái đóng khi có tác động
74ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
5. Công tắc hành trình nam châm
Công tắc hành trình nam châm thuộc loại công tắc hành trình không tiếpxúc. Nguyên lý hoạt động và kí hiệu được biểu diễn hình 6.10
Hình 6.10. Côngtắc hành trìnhnam châma, Vị trí chưađóng; b, Vị tríđóng; c, Ký hiệu

75ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
6. Cảm biến
a, Cảm biến cảm ứng từ
Nguyên lý hoạt động của cảm biến cảm ứng từ biểu diễn ở hình 6.11. Bộtạo dao động sẽ phát ra tần số cao. Khi có vật cản bằng kim loại nằm trongvùng đường sức của từ trường, trong kim loại đó sẽ hình thành dòng điệnxoáy. Như vậy năng lượng của bộ dao động sẽ giảm, dòng điện xoáy sẽtăng, khi vật cản càng gần cuộn cảm ứng. Qua đó biên độ dao động của bộdao động sẽ giảm. Qua bộ so, tín hiệu ra được khuếch đại. Trong trườnghợp tín hiệu ra và tín hiệu nhị phân, mạch Schmitt trigơ sẽ đảm nhận nhiệmvụ này.
Hình 6.11. Nguyên lý hoạt động của cảm biến cảm ứng từ
76ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
Sơ đồ đơn giản của mạch dao động LC được biểu diễn ở hình 6-12a. Nguyênlý của bộ dao động bằng tranzitor biểu diễn hình 6-12b
Hình 6.12. Sơ đồ đơn giảna, mạch dao động; b, Bộ dao động bằng tranzitor

77ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
Mạch Schmitt trigơ có nhiệm vụ là chuyển tín hiệu có dạng hình sin thành tínhiệu có dạng xung, sơ đồ mạch và nguyên lý được trình bày ở hình 6.13
Hình 6.13. Nguyên lý hoạt động mạch Schmitt trigơa, Sơ đồ mạch với tranzitor lưỡng cực T1, T2
b, Đường đặc tính chuyển tiếpc, Ví dụ chuyển đổi hiệu điện thế dạng hình sin thành hiệu điện thế dạng xung
78ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
Cách lắp trong mạch và kí hiệu cảm biến cảm ứng từ biểu diễn ở hình 6.14
Hình 6.14. Cách lắp và ký hiệu cảm biến cảm ứng từ

79ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
b, Cảm biến điện dung
Nguyên tắc hoạt động của cảm biến điện dụng biểu diễn ở hình 6.15. Bộtạo dao động sẽ phát ra tần số cao. Khi có vật cảm bằng kim loại hoặc phi kim loại nằm trong vùng đường sức của điện trường, điện dung tụ điện thayđổi. Như vậy tần số riêng của bộ dao động thay đổi. Qua bộ so và bộ nắndòng, tín hiệu ra được khuyếch đại.
Trong trường hợp tín hiệu ra là tín hiệu nhi phân, mạch Schmitt trigơ sẽđảm nhận nhiệm vụ này
Hình 6.15. Nguyên lý hoạt động của cảm biến điện dung
80ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
Cách lắp trong mạch và kí hiệu cảm biến điện dung biểu diễn ở hình 6.16
Hình 6.16. Cảm biến điện dungA, Hình dáng; b, Cấu tạo; c, Ký hiệu và cách lắp

81ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
c, Cảm biến quang
Cấu tạo cảm biến quang gồm 2 bộ phận phát và bộ phận nhận (thu). Nguyên tắc hoạt động của cảm biến quang biểu diễn ở hình 6.17. Bộ phậnphát sẽ phát ra đi tia hồng ngoại bằng điôt phát quang, khi gặp vật chắn, tiahồng ngoại sẽ phản hồi lại vào bộ phận nhận. Như vậy ở bộ phận nhận, tiahồng ngoại phản hồi được xử lý và cho tín hiệu ra sau khi qua bộ khuyếchđại
Hình 6.17. Cảm biến quang
82ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
Tuỳ theo vị trí sắp xếp của bộ phậnphát và bộ phận nhận, người tachia cảm biến quang thành hailoại chính
- Cảm biến quang một chiều, xemhình 6.18a
- Cảm biến quang phản hồi, xem hình6.18b
Hình 6.18. Cảm biến quanga, Cảm biến quang một chiềub, Cảm biến quang phản hồic, Ký hiệu và cách lắp trong mạch
83ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
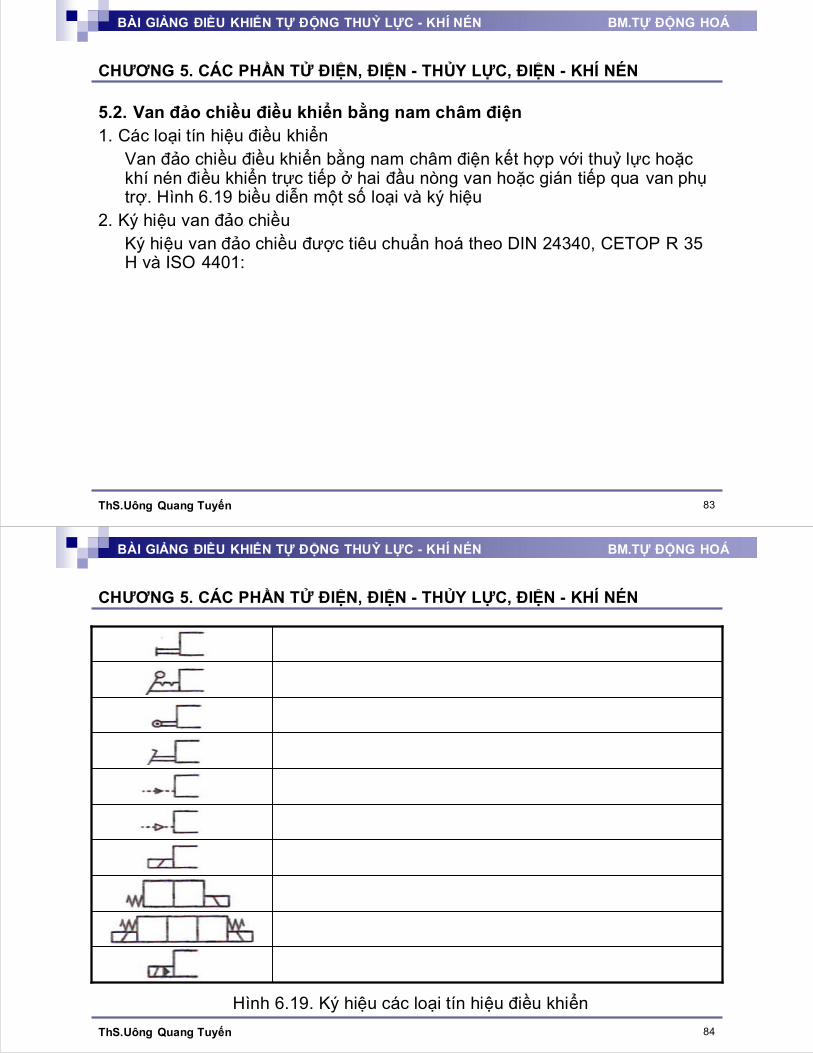
5.2. Van đảo chiều điều khiển bằng nam châm điện
1. Các loại tín hiệu điều khiển
Van đảo chiều điều khiển bằng nam châm điện kết hợp với thuỷ lực hoặckhí nén điều khiển trực tiếp ở hai đầu nòng van hoặc gián tiếp qua van phụtrợ. Hình 6.19 biều diễn một số loại và ký hiệu
2. Ký hiệu van đảo chiều
Ký hiệu van đảo chiều được tiêu chuẩn hoá theo DIN 24340, CETOP R 35 H và ISO 4401:
84ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 5. CÁC PHẦN TỬ ĐIỆN, ĐIỆN - THỦY LỰC, ĐIỆN - KHÍ NÉN
Hình 6.19. Ký hiệu các loại tín hiệu điều khiển

85ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
6.1. Giới thiệu về hệ thống điều khiểnTrong kỹ thuật điều khiển, các hoạt động của các cơ cấu trong hệ
thống điều khiển tự động đều xuất phát từ các phương trình chuyển động đượcxây dựng trên nguyên lý làm việc của hệ thống. Các phương trình này là hàm tích hợp những giá trị của tín hiệu vào và tín hiệu ra và được viết dưới dạng các biến số của đại số Bool.
Quá trình định nghĩa tín hiệu vào ra đầy đủ, tuân thủ nguyên lý hoạt động của hệ thống để xây dựng được các hàm tối ưu, tức giảm thiểu được tối đa các phần tử logic trong thiết kế là một nhiệm vụ quan trọng trong kỹ thuật điều khiển.
Tùy theo mức độ đơn giản hay phức tạp của hoạt động hệ thống ta cóthể có ít hay nhiều phương trình điều khiển.
86ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
Ví dụ: Cơ cấu một đầu khoan tự động thủy lực mô tả hình 6.1, với yêu cầu kỹthuật như sau:Đưa chi tiết cần khoan vào vị trí cần khoan, khi đó ta ấn nút Start PB, đầu khoan tịnh tiến đến và khoan chi tiết. Đạt đến chiều sâu cần thiết (S2) đầu khoan tự động quay về. Trong quá trình khoan nếu xảy ra sự cố ta ấn nút Stop PB đầu khoan tự động lùi về.
Hình 6.1- Cơ cấu khoan
Hình 6.2- Mạch thuỷ lực cơ cấu khoan

87ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
Phương trình điều khiển được viết như sau:
Phương trình tải: 1Y = K
Dựa vào phương trình điều khiển và phương trình tải, mạch điện điều khiển được thiết kế như hình 6.3 và mạch điều khiển bằng thủy lực hình 6.4.
Hình 6.3- Mạch điều khiển bằng thuỷ lực Hình 6.4- Mạch điều khiển điện
88ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
6.2. Phân loại phương pháp điều khiển 1. Điều khiển tùy thuộc
Hình 6.5 mô tả mạch dập đơn giản điều khiển tùy chọn. Gồm một van 4/2 có nhớ2.6, một phần tử OR và 3 van tác động tín hiệu bằng tay.
Hình 6.5- Điều khiển tuỳ thuộc

89ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
2. Điều khiển theo hành trình
Hình 6.6 mô tả một mạch làm việc được lặp đi lặp lại. Ngay khi nguồn khí cung cấp được mởbởi van 0.1, pít tông được khởi động qua lại trong xy lanh cho tới khi nguồn khí cung cấp được đóng lại. Van tác động con lăn 1.1 và 1.2 được bố trí như các hành trình để đưa tín hiệu tới van nhớ trạng thái 4/2 1.3 khi cần pit tông chạm vào con lăn. Hình 6.6- Điều khiển theo hành trình
90ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
3. Điều khiển theo thời gian
Hình 6.7 mô tả hệ thống ép ủi hơi két nón. Khi nhấn nút ấn S1 van đảo chiều 1Y đổi vị trí, pittông 1A đi lên để ép két nón, đồng thời dòng điện vào phần tử relay thời gian T1. Sau thời gian t thì pittông sẽ đi xuống trở về vị trí ban đầu.
Hình 6.7- Điều khiển theo thời gian

91ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
Hình 6.8 là cơ cấu điều khiển dịch chuyển pittông khí nén để đẩy các sản phẩm theo nguyên lý thời gian. Với các phần tử thời gian sử dụng nguồn năng lượng lưu chất thì chỉ hoạt động ở hai vị trí cuối của xylanh khí nén. Thời gian trì hoãn phụ thuộc vào độ hiệu chỉnh của van tiết lưu.
Hình 6.8- Điều khiển theo thời gian bằng lưu chất khí nén
92ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
4. Điều khiển phối hợp Điều khiển phối hợp là điều khiển phối các điều khiển trên. Hình 6.9 là mô tả mạch điều khiển của cơ cấu ép phối hợp 3 thành phần điều khiển: tùy chọn (2.3), hành trình (2.2) và thời gian (2.5). Bình thường khi cấp nguồn năng lượng thì phần tử 2.5 xác lập thời gian và sau thời gian này thì có dòng năng lượng tạo ra nhưng nó đi qua cửa xả của 2.3 không đủ áp để kích van 2.4. Ngược lại nếu tác động 2.3 mà 2.5 chưa xác lập thì dòng năng lượng được tạo ra cũng không kích cho van 2.4 hoạt động. Tín hiệu kích van 2.4 dịch chuyển với điều kiện đồng thời nút nhấn 2.3 được tác động và sau thời gian xác lập của phần tử 2.5. Khi pittông ép đi ra và chạm vào công tắc hành trình 1.2 thì van 2.4 bị kích ngược lại và pittông lại trở về vị trí ban đầu. Hình 6.9- Điều khiển ép phối hợp

93ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
5. Điều khiển theo chương trình cứng Các điều khiển máy móc hoàn toàn tự động được phân theo ý muốn và được chỉ định theo các điều khiển chương trình hoặc các điều khiển liên tục. Cả hai hệ thống có những ích lợi và những bất lợi. Với điều khiển chương trình, các tác động được thi hành theo sự thỏa thuận với một chương trình định nghĩa trước. Thông thường bộ chương trình bao gồm một cái trục được vận hành bằng điện lắp với một số cam (chi tiết cam cơ khí) điều khiển một số van tương ứng. Chương trình được biên dịch bởi các cam được lắp đặt chính xác và tốc độ quay của trục cam. Hình khai triển 6.10 mô tả một điều khiển theo chương trình cứng điều khiển máy nong đầu cắt ống nhựa theo kích thước. Tốc độ của động cơ vận hành đồng bộ thích ứng với khoảng thời gian của một chu kỳ làm việc đầy đủ hoàn tất trong một vòng quay. Mỗi xy lanh tác động kép được điều khiển bởi van tác động con lăn 4/2 với lò xo trả về vị trí ban đầu.
94ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
Hình 6.10- Điều khiển theo chương trình cứng

95ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
6. Điều khiển tuần tựNguyên tắc của điều khiển tuần tự là hoạt động của phần tử trước sẽ khởi tạo hoạt động phần tử kế tiếp. Nếu một hoạt động của một phần tử nào đó bị lỗi dùbất kỳ lý do gì gây nên các phần tử tiếp theo sau không được khởi tạo và toàn bộ hệ thống sẽ bị dừng. Điều khiển tuần tự được thiết kế cho các vận hành tự động hoặc bán tự động. Bán tự động khi tín hiệu khởi động phải được tác động bằng tay cho mỗi lần chạy.
96ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
Hình 6.11- mô tả mạch điều khiển tuần tự bán tự động
Hình 6.12- mô tả mạch điều khiển tuần tự hoàn toàn tự động.

97ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
6.3. Phương pháp thiết kế mạch điều khiển Mạch điều khiển được xem như là một quả tim của của một hệ thống làm việc khí nén và thủy lực. Do đó nhiệm vụ thiết kế hoàn chỉnh một mạch điều khiển đảm bảo được sự đúng đắn về nguyên lý hoạt động, đơn giản, tin cậy, ổn định và linh hoạt là hết sức được quan tâm. Muốn như vậy, cơ bản ta phải thực hiện trình tự những bước sau:
6.3.1. Biểu diễn chức năng của quá trình điều khiển Tùy thuộc vào tính năng làm việc của hệ thống mà trong một hệ thống điều khiển có thể có một hay nhiều mạch điều khiển thực hiện các nhiệm vụ riêng biệt. Mặt khác, hầu hết trong các hệ thống, công nghệ tự động hiện đại có sựkết hợp rất nhiều các cơ cấu chấp hành khác nhau rất đa dạng: Cơ khí, khí nén, thủy lực, điện… do đó trong quá trình điều khiển, tất yếu là nhiều hệ thống điều khiển được kết hợp với nhau, ví dụ: điều khiển khí nén kết hợp với điện, thủy lực, điều khiển theo chương trình PLC, máy tính…
98ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
6.3.1.1. Biểu đồ trạng thái 1. Kí hiệu
Hình 6.13- Kí hiệu biểu diễn biểu đồ trạng thái
99ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
2. Thiết kế biểu đồ trạng thái Biểu đồ trạng thái biểu diễn các trạng thái hoạt động của các phần tử trong hệthống, mối liên hệ giữa các phần tử và trình tự chuyển mạch của các phần tử. Do đó nó được xem như là cơ sở thể hiện nguyên lý hoạt động của một hệthống. Trục tung của biểu đồ trạng thái là biểu diễn trạng thái (hành trình chuyển động, áp suất, góc quay,…). Trục hoành biểu diễn các bước thực hiện hoặc là thời gian hành trình. Hành trình làm việc được chia thành nhiều bước. Sự thay đổi trạng thái các bước được biểu diễn bằng các đường nét đậm. Sự liên kết các tín hiệu được thể hiện bằng các nét nhỏ và chiều tác động được biểu diễn bằng mũi tên
100ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
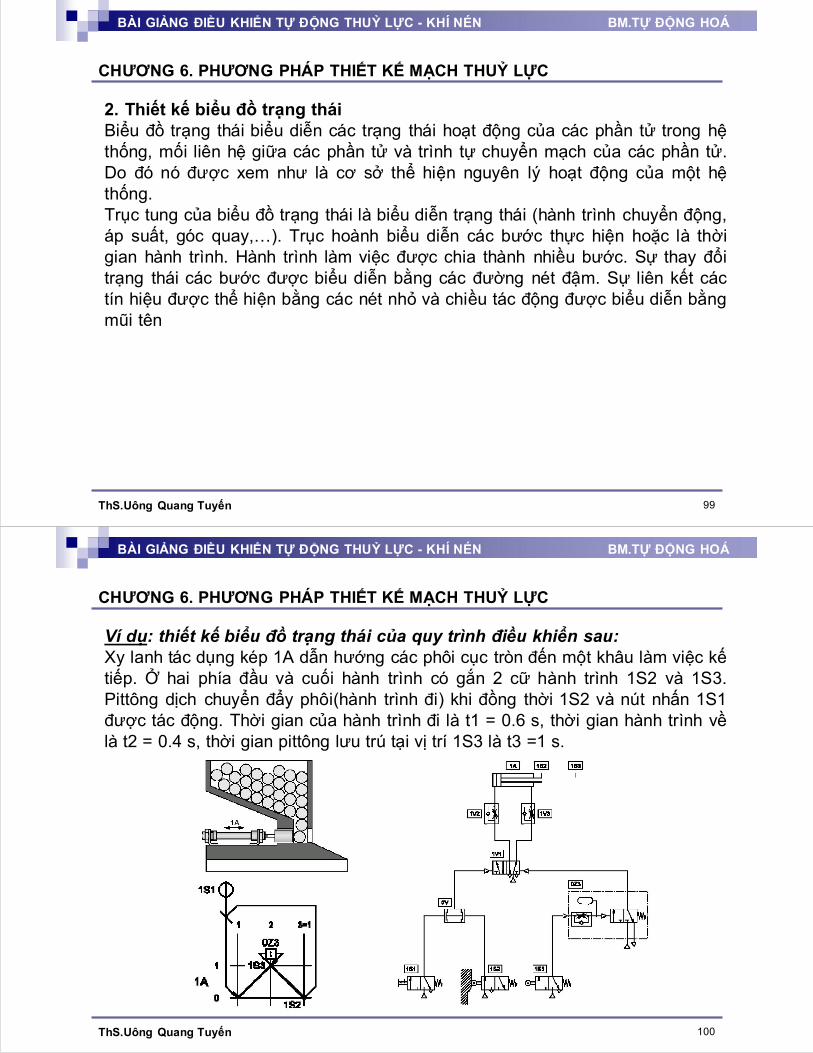
Ví dụ: thiết kế biểu đồ trạng thái của quy trình điều khiển sau: Xy lanh tác dụng kép 1A dẫn hướng các phôi cục tròn đến một khâu làm việc kếtiếp. Ở hai phía đầu và cuối hành trình có gắn 2 cữ hành trình 1S2 và 1S3. Pittông dịch chuyển đẩy phôi(hành trình đi) khi đồng thời 1S2 và nút nhấn 1S1 được tác động. Thời gian của hành trình đi là t1 = 0.6 s, thời gian hành trình vềlà t2 = 0.4 s, thời gian pittông lưu trú tại vị trí 1S3 là t3 =1 s.

101ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
6.3.1.2. Sơ đồ chức năng Sơ đồ chức năng bao gồm các lệnh và các bước thực hiện. Các bước thực hiện được kí hiệu theo số thứ tự và các lệnh gồm tên loại, loại lệnh và vị trí ngắt của lệnh
102ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
ST
NSD
SD
D
T
SH
NS
S

103ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
6.3.1.3. Lưu đồ tiến trình 1. Kí hiệu Lưu đồ tiến trình là giải thuật (thuật toán) của một quá trình điều khiển. Thể hiện các trình tự hoạt động, những tín hiệu tác động ảnh hưởng đến hệ thống điều khiển.
Hình 6.17- Kí hiệu biểu diễn lưu đồ tiến trình
104ThS.Uông Quang Tuyến
BÀI GIẢNG ĐIỀU KHIỂN TỰ ĐỘNG THUỶ LỰC - KHÍ NÉN BM.TỰ ĐỘNG HOÁ
CHƯƠNG 6. PHƯƠNG PHÁP THIẾT KẾ MẠCH THUỶ LỰC
1S2=1
1S3=1
1S1=1
1S2=1
1A+
1A-
BEGIN
END
2. Thiết kế lưu đồ tiến trình Nguyên tắc hoạt động của mạch điều khiển ở hình 6.18 được thực hiện như sau:
- Bước thực hiện thứ nhất: Khi pittông ở vị trí ban đầu (1S2 =1, 1S3=0) nút nhấn khởi động 1S3 tác động pittông đi ra (1A+).
- Bước thực hiện thứ hai: Khi pittông đi đến cuối hành trình chạm công tắc 1S1, pittông sẽ lùi về (1A-). - Bước thực hiện thứ ba: Tại vị trí ban đầu pittông chạm công tắc 1S2, quá trình điều khiển kết thúc. Quá trình điều khiển được viết như sau:
- Bước thực hiện thứ nhất:
- Bước thực hiện thứ hai: 1S1=1A- → 1S2
- Bước thực hiện thứ ba: 1S2 = 1 kết thúc quá trình
111312111 SASSS