signal s & systems
TRANSCRIPT
Some Course Notes
SIGNAL S & SYSTEMS

Part I: Introduction to signals and systems
Signals are detectable quantities used to convey information about time-varying physical phenomena.
Common examples of signals are human speech, temperature, pressure, and stock prices. Electrical
signals, normally expressed in the form of voltage or current waveforms, are some of the easiest signals to
generate and process.
Mathematically, signals are modeled as functions of one or more independent variables. Examples of
independent variables used to represent signals are time, frequency, or spatial coordinates.
Figure 1.1 illustrates some common signals and systems encountered in different fields of engineering,
with the physical systems represented in the left-hand column and the associated signals included in the
right-hand column.
Fig. 1.1. Examples of signals and systems. (a) An electrical circuit; (c) an audio recording system; (e) a
digital camera; and (g) a digital thermometer. Plots (b), (d), (f ), and (h) are output signals generated,
respectively, by the systems shown in (a), (c), (e), and (g).
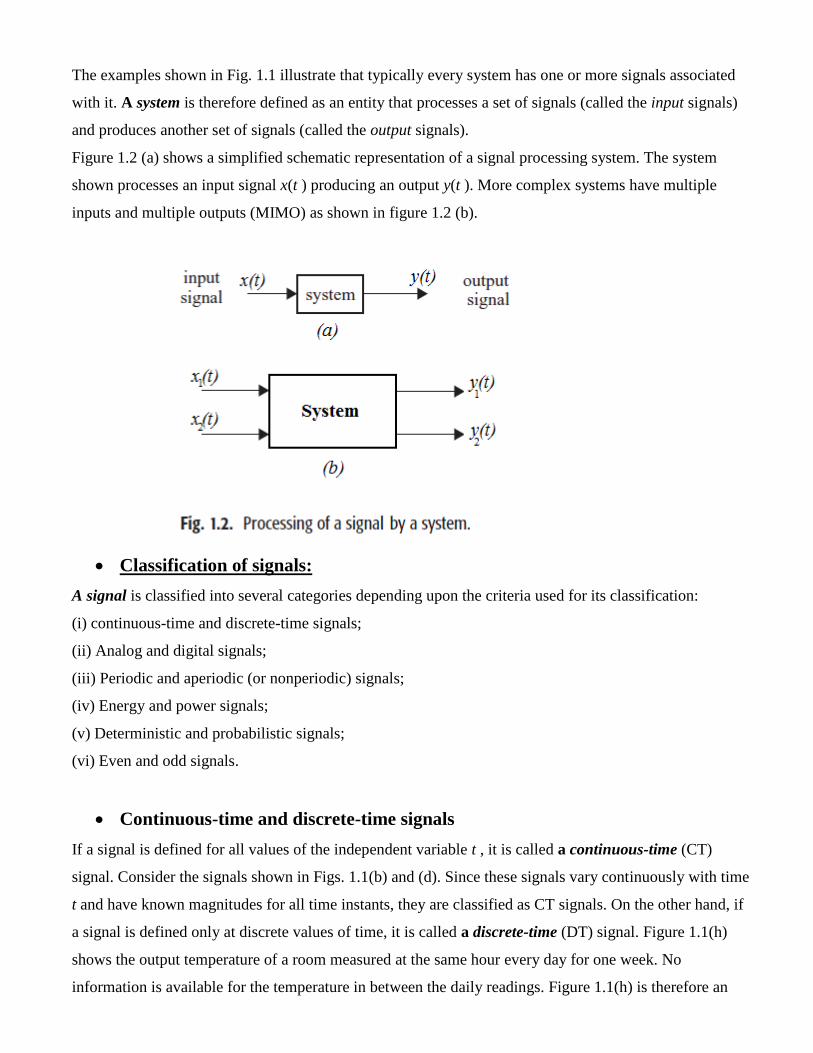
The examples shown in Fig. 1.1 illustrate that typically every system has one or more signals associated
with it. A system is therefore defined as an entity that processes a set of signals (called the input signals)
and produces another set of signals (called the output signals).
Figure 1.2 (a) shows a simplified schematic representation of a signal processing system. The system
shown processes an input signal x(t ) producing an output y(t ). More complex systems have multiple
inputs and multiple outputs (MIMO) as shown in figure 1.2 (b).
Classification of signals:
A signal is classified into several categories depending upon the criteria used for its classification:
(i) continuous-time and discrete-time signals;
(ii) Analog and digital signals;
(iii) Periodic and aperiodic (or nonperiodic) signals;
(iv) Energy and power signals;
(v) Deterministic and probabilistic signals;
(vi) Even and odd signals.
Continuous-time and discrete-time signals
If a signal is defined for all values of the independent variable t , it is called a continuous-time (CT)
signal. Consider the signals shown in Figs. 1.1(b) and (d). Since these signals vary continuously with time
t and have known magnitudes for all time instants, they are classified as CT signals. On the other hand, if
a signal is defined only at discrete values of time, it is called a discrete-time (DT) signal. Figure 1.1(h)
shows the output temperature of a room measured at the same hour every day for one week. No
information is available for the temperature in between the daily readings. Figure 1.1(h) is therefore an

example of a DT signal. In our notation, a CT signal is denoted by x(t ) with regular parenthesis, and a DT
signal is denoted with square parenthesis as follows:
x[nT ], n = 0, ±1, ±2, ±3, . . . ,
where T denotes the time interval between two consecutive samples. In the example of Fig. 1.1(h), the
value of T is one day.
Elementary signals
In this section, we define some elementary functions that will be used frequently to represent more
complicated signals. Representing signals in terms of the elementary functions simplifies the analysis and
design of linear systems.
1. Unit step function
The CT unit step function u(t ) is defined as follows:
The waveforms for the unit step functions u(t ) is shown in Fig.1.3. It is observed from Fig.1.3 that the CT
unit step function u(t ) is piecewise continuous with a discontinuity at t = 0. In other words, the rate of
change in u(t ) is infinite at t = 0.
Fig. 1.3: The waveforms for the unit step functions u(t ).


2. CT unit impulse function
The unit impulse function δ(t ), also known as the delta function, is defined as follows:
It is shown in Fig.1.6.
Fig.1.6: The unit impulse function.
The unit impulse may be visualized as a very short duration pulse of unit area. This may be expressed
mathematically as
To illustrate how the impulse function affects other functions, let us evaluate the integral
where Since , , except at t = t0 , Thus,
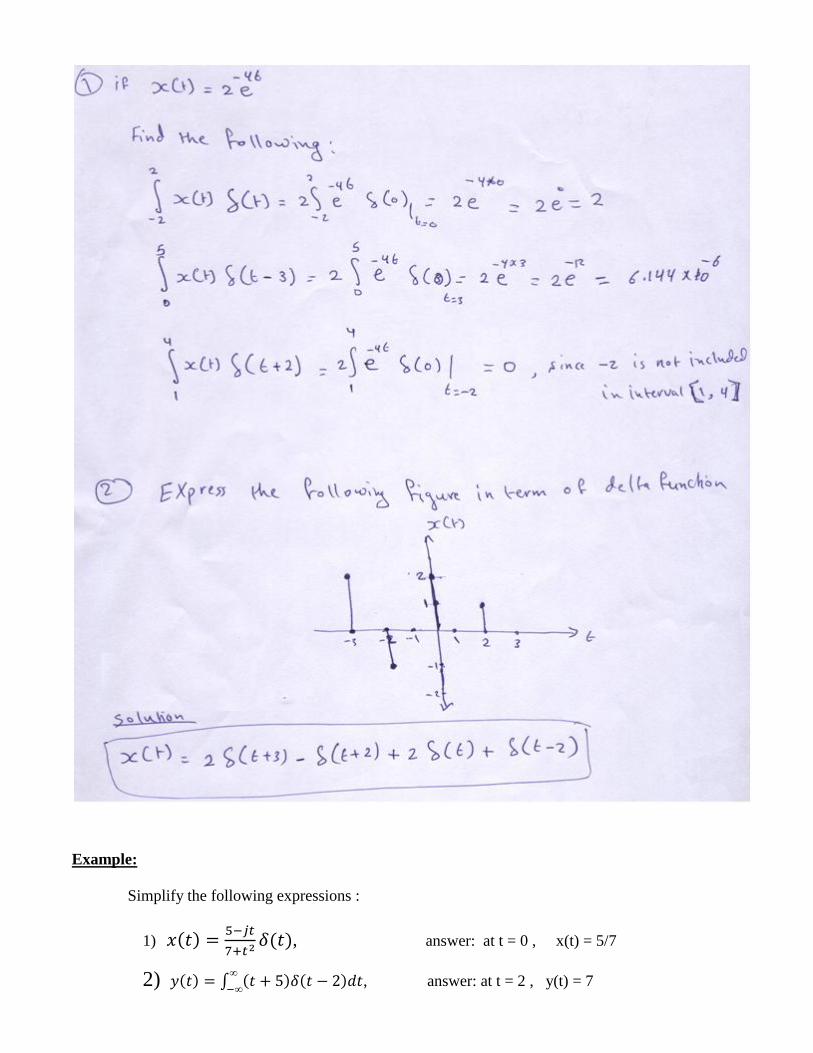
Example:
Simplify the following expressions :
1)
, answer: at t = 0 , x(t) = 5/7
2)
, answer: at t = 2 , y(t) = 7
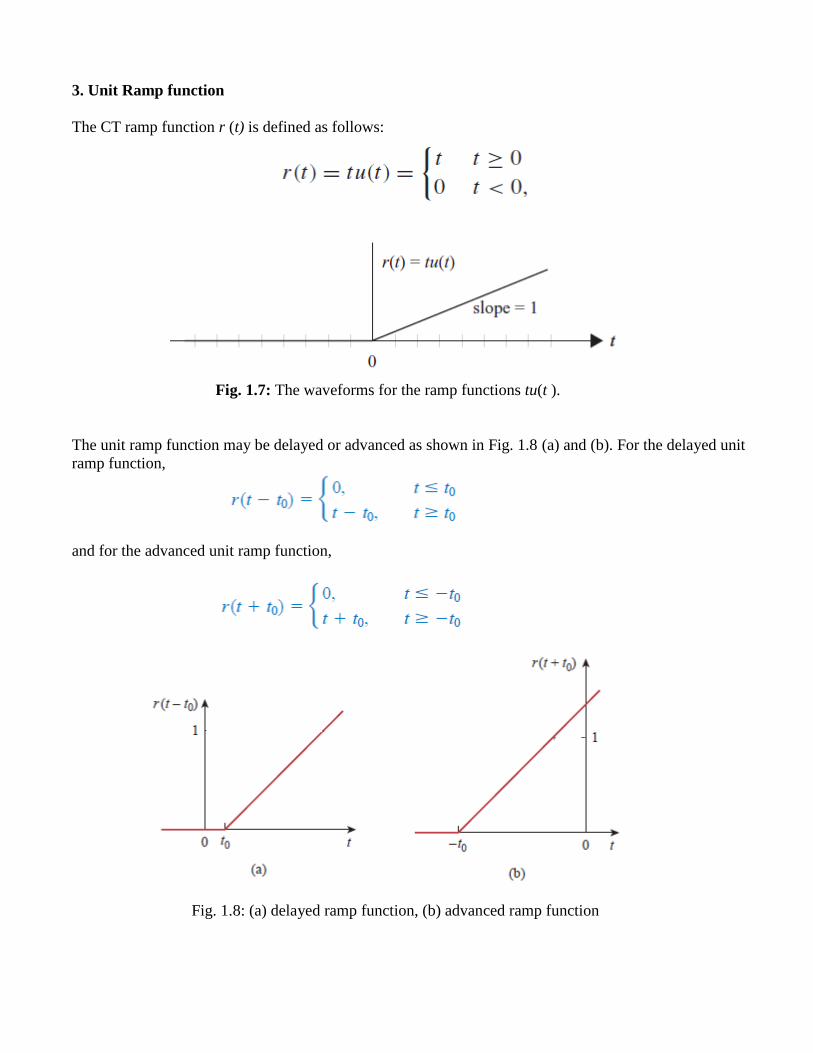
3. Unit Ramp function
The CT ramp function r (t) is defined as follows:
Fig. 1.7: The waveforms for the ramp functions tu(t ).
The unit ramp function may be delayed or advanced as shown in Fig. 1.8 (a) and (b). For the delayed unit
ramp function,
and for the advanced unit ramp function,
Fig. 1.8: (a) delayed ramp function, (b) advanced ramp function
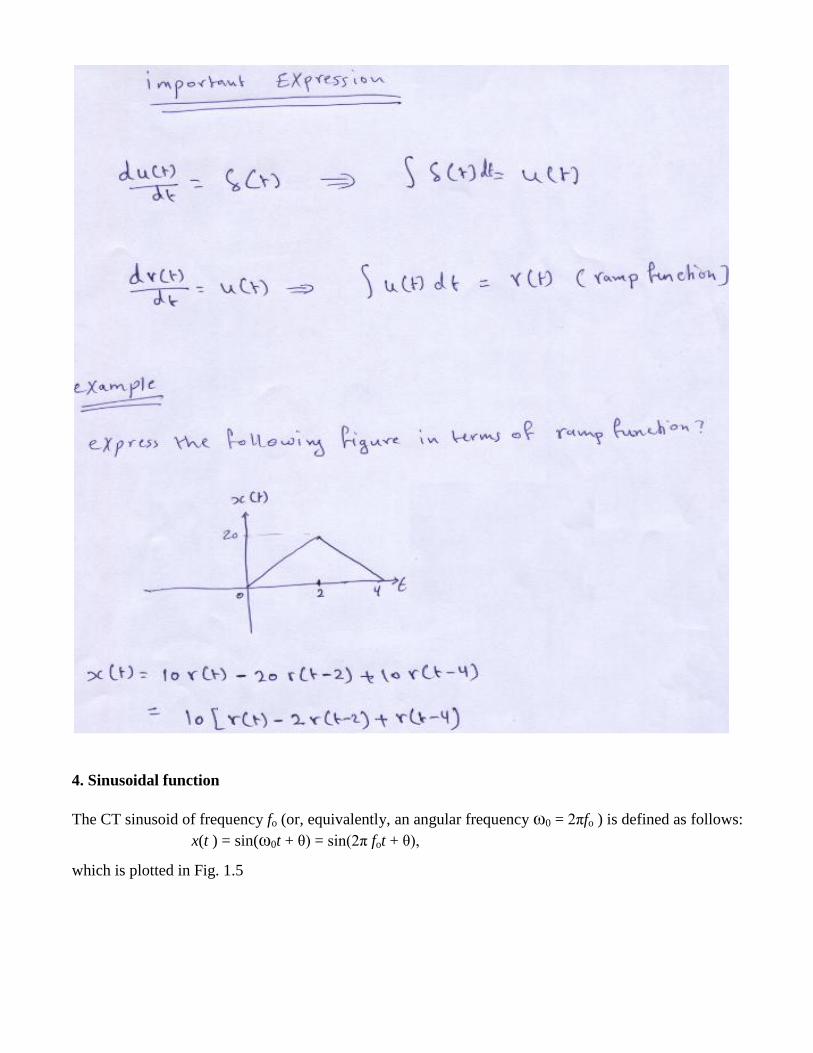
4. Sinusoidal function
The CT sinusoid of frequency fo (or, equivalently, an angular frequency ω0 = 2πfo ) is defined as follows:
x(t ) = sin(ω0t + θ) = sin(2π fot + θ),
which is plotted in Fig. 1.5

Fig. 1.9: The waveforms for CT sinusoidal functions.
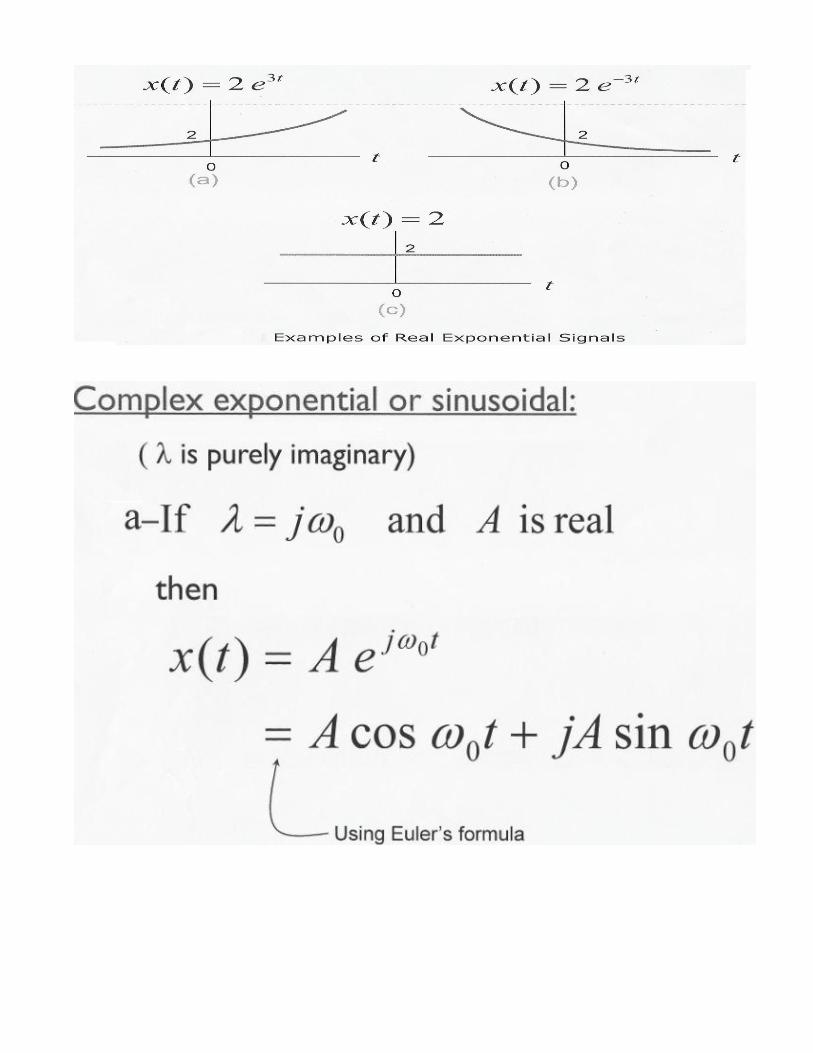
5. CT exponential function
A CT exponential function in general is represented by:


Periodic and aperiodic signals:
A CT signal x(t ) is said to be periodic if it satisfies the following property:
x(t ) = x(t + T0), at all time t and for some positive constant T0.
Where T0 is referred to as the fundamental period of x(t ).
A signal that is not periodic is called an aperiodic or non-periodic signal. Figure 1.11 shows examples of
both periodic and aperiodic signals. The reciprocal of the fundamental period of a signal is called the fun-
damental frequency. Mathematically, the fundamental frequency is expressed as follows
f0 =1/T0, for CT signals,
where T0 is the fundamental period of the CT signal. The frequency of a signal provides useful
information regarding how fast the signal changes its amplitude. The unit of frequency is cycles per
second (c/s) or hertz (Hz). Sometimes, we also use radians per second as a unit of frequency. Since there
are 2π radians (or 360◦) in one cycle, a frequency of f0 hertz is equivalent to 2π f0 radians per second. If

radians per second is used as a unit of frequency, the frequency is referred to as the angular frequency and
is given by
ω0 = 2π/T0
A familiar example of a periodic signal is a sinusoidal function represented mathematically by the
following expression:
x(t ) = A sin(ω0t + θ).
The sinusoidal signal x(t ) has a fundamental period T0 = 2π/ω0 as we prove next. Substituting t by t + T0 in
the sinusoidal function, yields x(t + T0) = A sin(ω0t + ω0T0 + θ).
Since x(t ) = A sin(ω0t + θ) = A sin(ω0t + 2kπ + θ), for k = 0,±1,±2, . . . ,
the above two expressions are equal iff ω0T0 = 2kπ. Selecting k = 1, the fundamental period is given by
T0 = 2π/ω0.
Fig. 1.11. Examples of periodic ((a), and (c), and aperiodic ((b) and (d) signals.
Examples
(i) CT sine wave: x1(t ) = sin(4πt ) is a periodic signal with period T1 = 2π/4π = 1/2;
(ii) CT cosine wave: x2(t ) = cos(3πt ) is a periodic signal with period T2 = 2π/3π = 2/3;
(iii) CT tangent wave: x3(t ) = tan(10t ) is a periodic signal with period T3 = π/10;
(iv) CT complex exponential: x4(t) = ej(2t+7)
is a periodic signal with period T4 = 2π/2 = π;
(v) CT sine wave of limited duration:
, is an aperiodic signal;
(vi) CT linear relationship: x6(t) = 2t + 5 is an aperiodic signal;
(vii) CT real exponential: x7(t) = e−2t
is an aperiodic signal.

Proposition : A signal g(t) that is a linear combination of two periodic signals, x1(t) with fundamental
period T1 and x2(t) with fundamental period T2 as follows:
g(t) = ax1(t ) + bx2(t ) is periodic iff
(rational number)
The fundamental period of g(t) is given by nT1 = mT2 provided that the values of m and n are chosen such
that the greatest common divisor (gcd) between m and n is 1 (i.e rational number).
Example
Determine if the following signals are periodic. If yes, determine the fundamental period.
(i) g1(t ) = 3 sin(4πt ) + 7 cos(3πt );
(ii) g2(t ) = 3 sin(4πt ) + 7 cos(10t ).
Solution
(i) In Example (i), we saw that the sinusoidal signals sin(4πt ) and cos(3πt ) are both periodic
signals with fundamental periods 1/2 and 2/3, respectively. Calculating the ratio of the two
fundamental periods yields:
which is a rational number. Hence, the linear combination g1(t ) is a periodic signal.
(ii) In Example (ii) , we saw that sin(4πt ) and 7cos(10t ) are both periodic signals with
fundamental periods 1/2 and π/5, respectively. Calculating the ratio of the two fundamental
periods yields:
which is not a rational number. Hence, the linear combination g2(t ) is not a periodic signal.
Deterministic and Random Signals:
Deterministic signals are those signals whose values are completely specified for any given time. Thus, a
deterministic signal can be modeled by a known function of time. Random signals are those signals that

take random values at any given time and must be characterized statistically. Random signals will not be
discussed in this text.
Deterministic signals can generally be expressed in a mathematical or graphical form. Some examples of
deterministic signals are as follows:
(1) CT sinusoidal signal: x1(t ) = 5 sin(20πt + 6);
(2) CT exponentially decaying sinusoidal signal: x2(t ) = 2e−t sin(7t ).
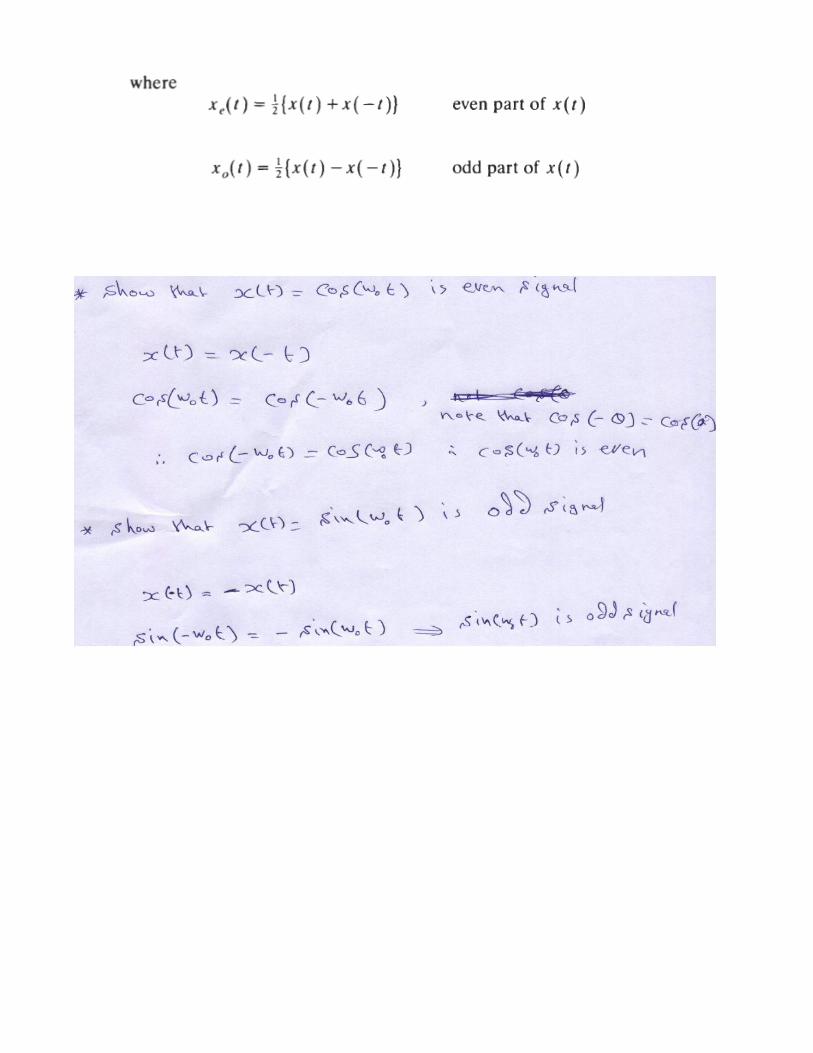
Even and Odd Signals:
A signal x ( t ) is referred to as an even signal if
x ( - t ) = x (t )
A signal x ( t ) is referred to as an odd signal if
x ( - t ) = - x ( t )
Examples of even and odd signals are shown in the following Figures:
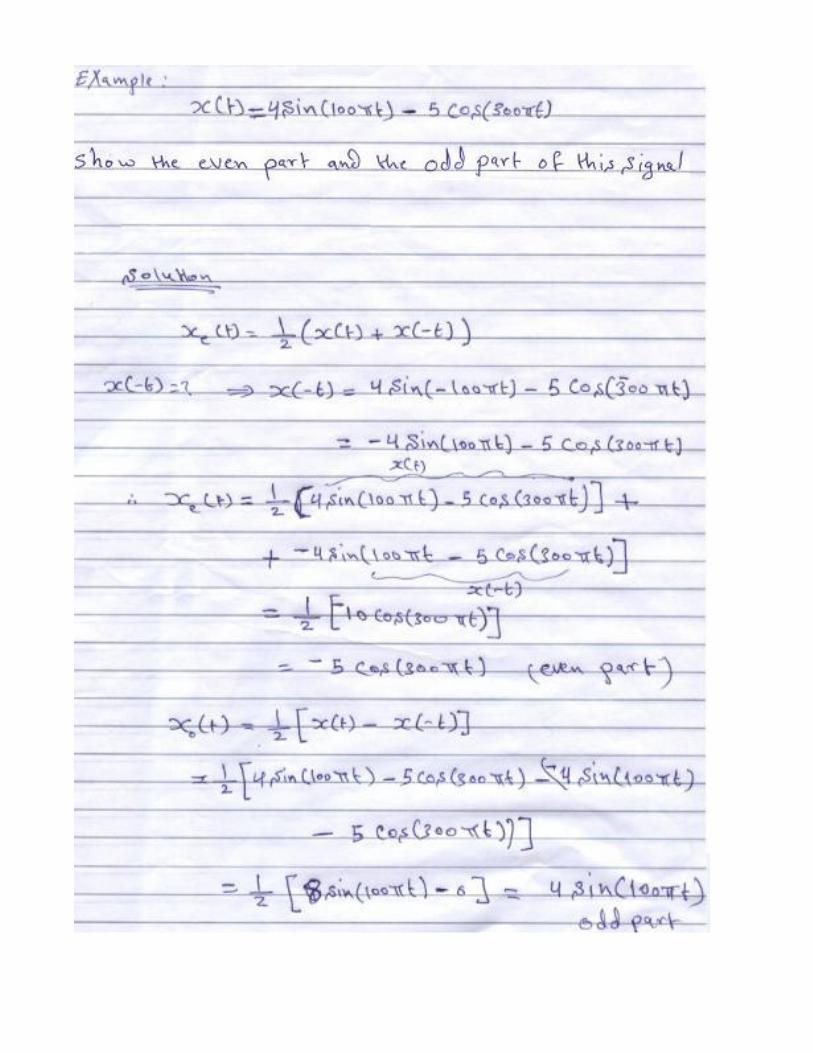
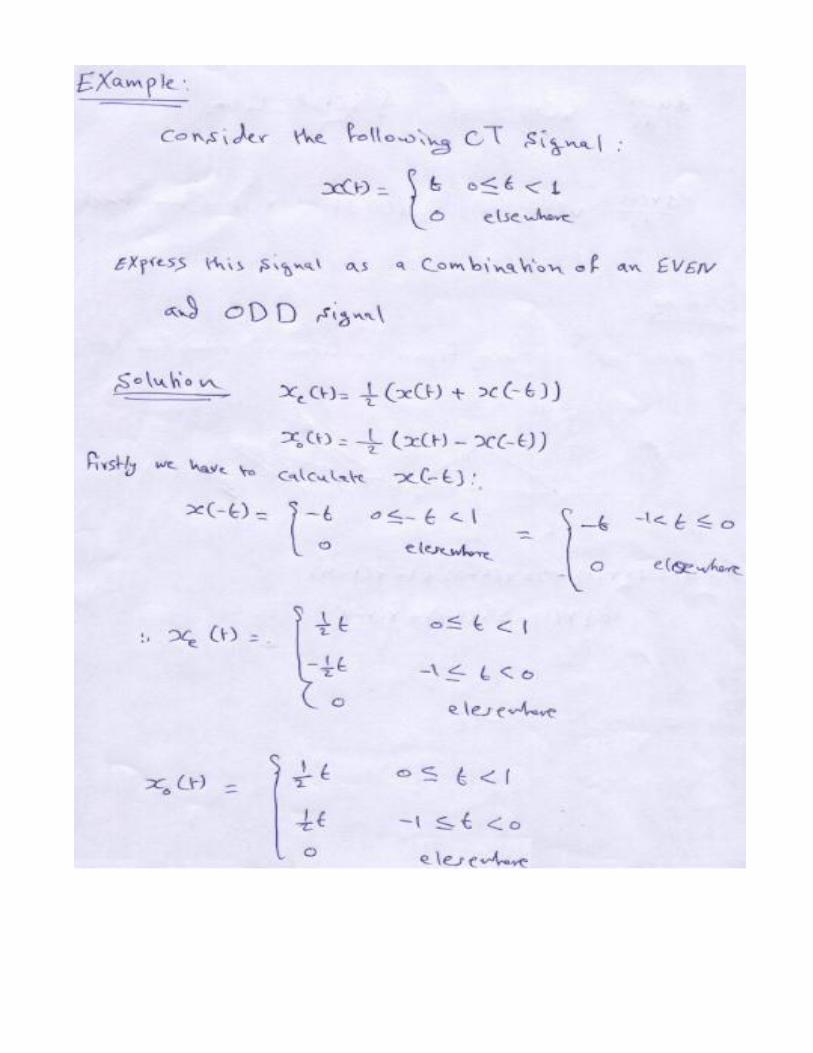
Any signal x(t) or x[n] can be expressed as a sum of two signals, one of which is even and one of which is
odd. That is,