secure scalable microgrid project at sandia national...
TRANSCRIPT
Secure Scalable Microgrid Project
at Sandia National Laboratories
Steven Glover, Ross Guttromson
Sandia National Laboratories is a multi-program laboratory managed and operated by Sandia Corporation, a wholly owned subsidiary of Lockheed Martin Corporation, for the U.S. Department of Energy's National Nuclear Security Administration under contract DE-AC04-94AL85000.
University of Minnesota
Michigan Tech.
Texas A&M
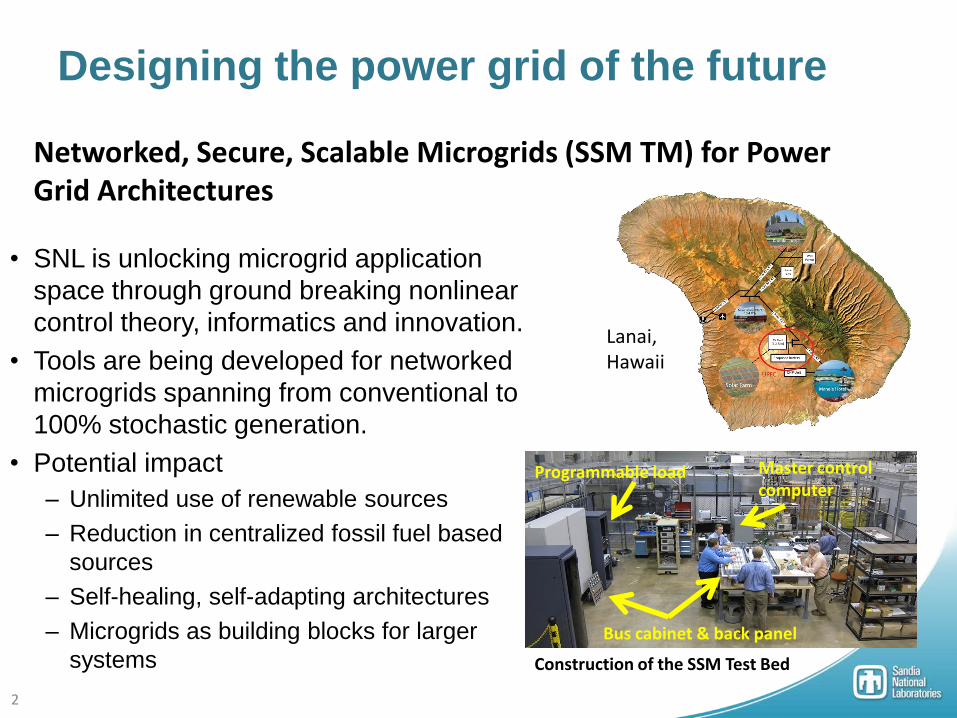
• SNL is unlocking microgrid application
space through ground breaking nonlinear
control theory, informatics and innovation.
• Tools are being developed for networked
microgrids spanning from conventional to
100% stochastic generation.
• Potential impact
– Unlimited use of renewable sources
– Reduction in centralized fossil fuel based
sources
– Self-healing, self-adapting architectures
– Microgrids as building blocks for larger
systems
Designing the power grid of the future
2
Networked, Secure, Scalable Microgrids (SSM TM) for Power Grid Architectures
Lanai, Hawaii
Bus cabinet & back panel
Master control computer
Programmable load
Construction of the SSM Test Bed
Load forecasting and dispatchable
sources enable grid performance
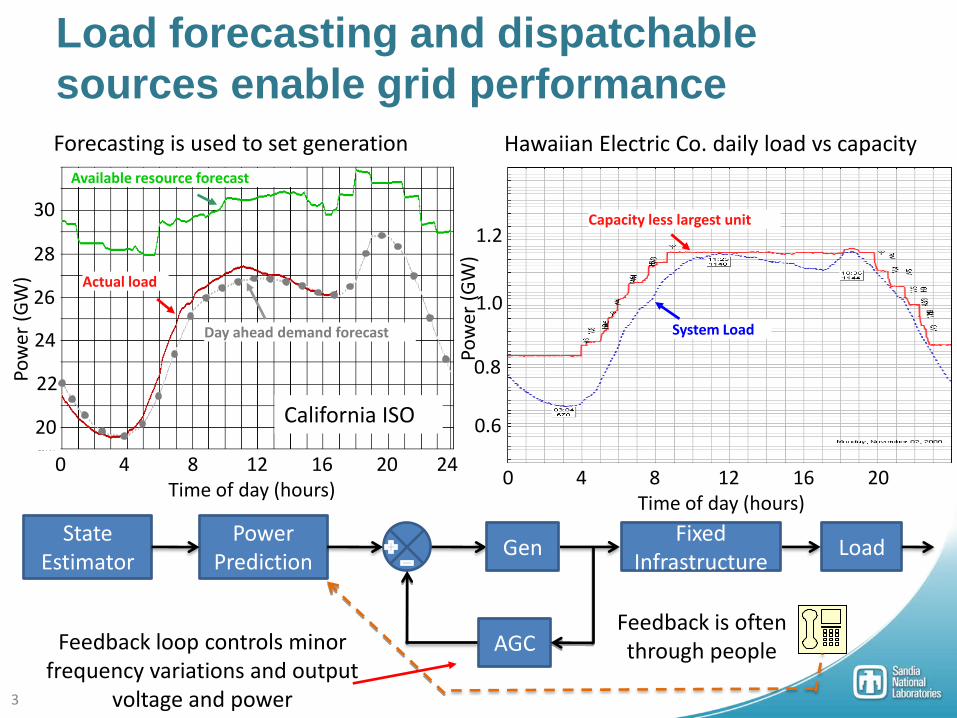
AGC
Gen Load Power
Prediction State
Estimator Fixed
Infrastructure
California ISO
Feedback loop controls minor frequency variations and output
voltage and power
Available resource forecast
Actual load
Day ahead demand forecast
30
26
22
20
0 4 8 12 16 20 24 Time of day (hours)
Pow
er (
GW
)
Capacity less largest unit
System Load
Hawaiian Electric Co. daily load vs capacity Forecasting is used to set generation
0 4 8 12 16 20 Time of day (hours)
Pow
er (
GW
)
1.2
1.0
0.8
0.6
Feedback is often through people
30
26
22
20
28
24
3

1200
1000
800
600
400
200
Stochastic sources complicate
forecasting
Wind power forecasting examples
6:00 9:00 12:00 15:00 18:00 Time (hrs) This is weather forecasting!
Actual wind Power
Forecast
0 2 4 6 8 10 12 14 16 18 20 22 24
400
300
200
100
0
MW
Solar Insolation, May 4, 2004 CST
Clear day
1200
1000
800
200
400
600 400
400
.
400
W/m
2
Hours
4
Renewable sources impact grid
performance
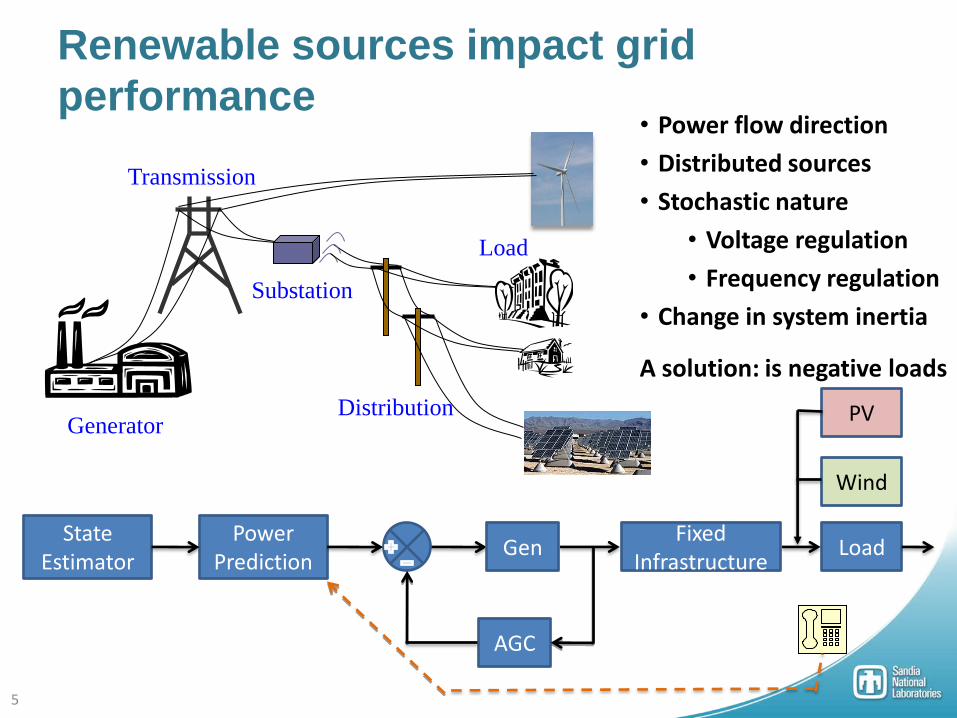
Generator
Transmission
Substation
Distribution
Load
AGC
Gen Load Power
Prediction State
Estimator Fixed
Infrastructure
PV
Wind
• Power flow direction
• Distributed sources
• Stochastic nature
• Voltage regulation
• Frequency regulation
• Change in system inertia
A solution: is negative loads
5

State Estimator
Power Prediction
PV
Wind
Gen
PV
Wind
AGC
To achieve maximum benefit renewable
energy needs to be treated as a source
Fixed Infrastructure
Load
System efficiency can increase
with reduction in excess generation capacity.
Both our generation and our loads are now random! 6
We are integrating and advancing
techniques for designing and analyzing
microgrids
• Developing enabling hardware – Microgrid test beds – Diesel generator emulator – Wind turbine emulator – Energy storage emulator
• Advancing Hamiltonian based control design – Enhances stability analysis – Distributed control development
• Creating tools to trade off information flow and energy storage – More efficiently utilize energy storage – Alternative communication requirements
• Mature technologies and create protocols for high level informatics based control – Adaptive, self healing, and secure systems
7
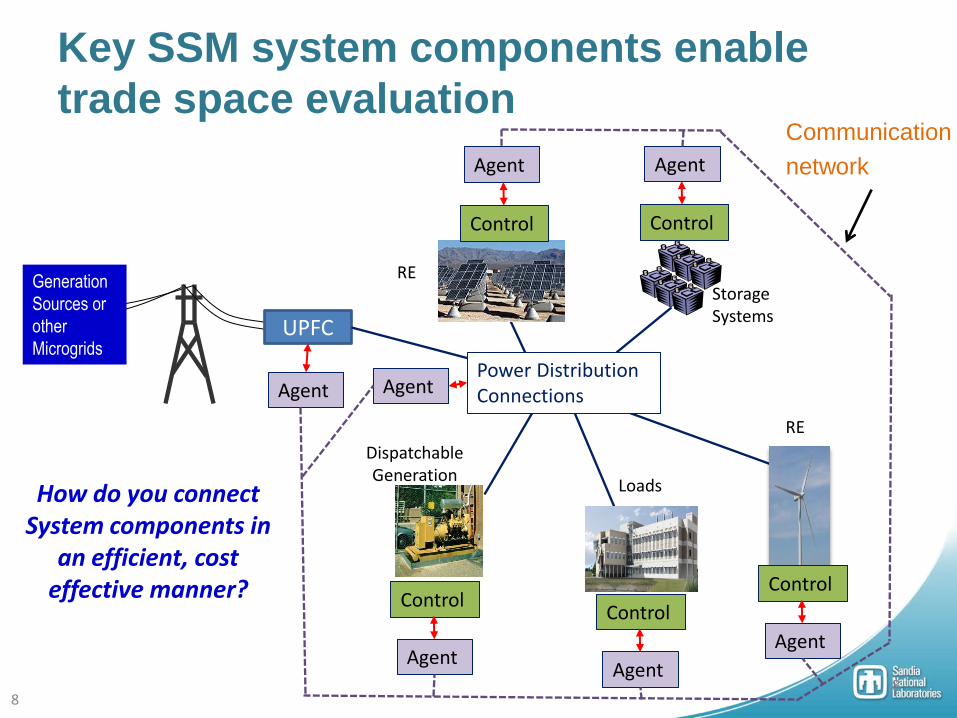
Key SSM system components enable
trade space evaluation
8
How do you connect System components in
an efficient, cost effective manner?
Generation
Sources or
other
Microgrids UPFC
Power Distribution Connections Agent
Control
Agent
Control
Agent
Control
Agent
Control
Agent
Agent
Loads
Storage Systems
Dispatchable Generation
RE
Control
Agent
RE
Communication
network
8
PV
Wind
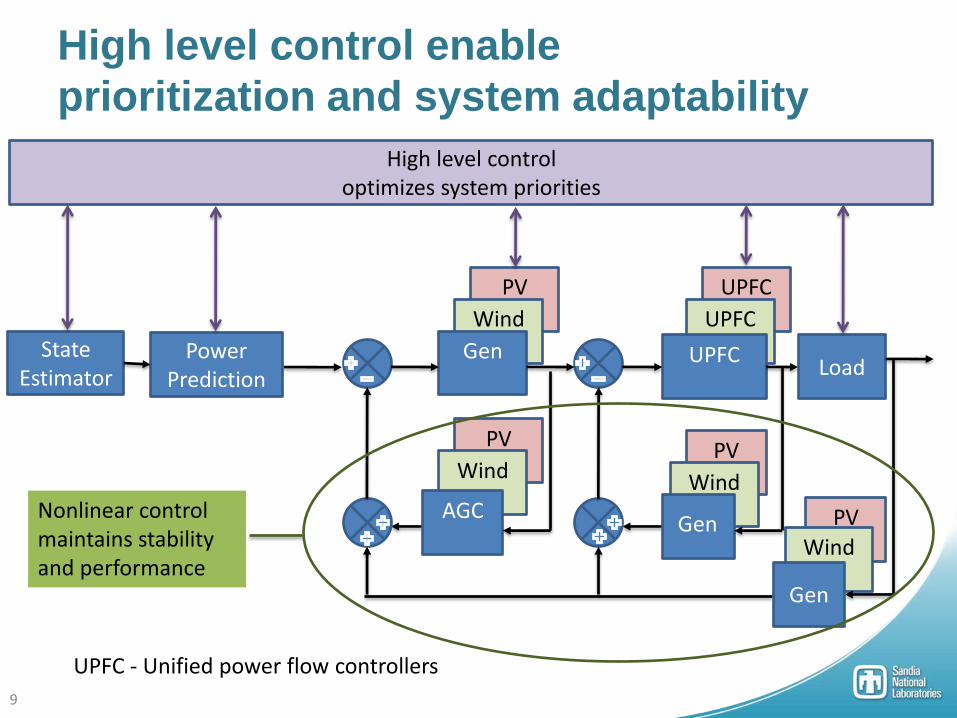
State Estimator
Power Prediction
PV
Wind
Gen
UPFC
UPFC
UPFC Load
PV
Wind
AGC
PV
Wind
UPFC - Unified power flow controllers
High level control enable
prioritization and system adaptability
Gen
Gen
High level control optimizes system priorities
Nonlinear control maintains stability and performance
9

SSM is a DC system constructed of many
custom components allowing flexibility
10
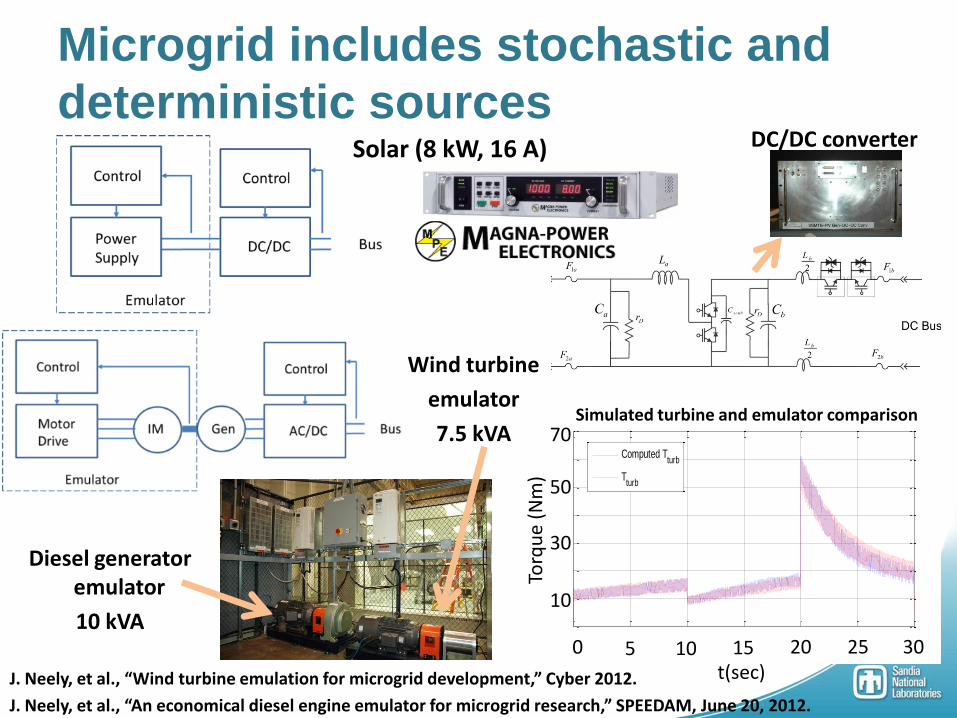
Microgrid includes stochastic and
deterministic sources Solar (8 kW, 16 A)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
t (sec)
Torq
ue (
Nm
)
Computed Tturb
Tturb
Wind turbine
emulator
7.5 kVA
J. Neely, et al., “Wind turbine emulation for microgrid development,” Cyber 2012.
J. Neely, et al., “An economical diesel engine emulator for microgrid research,” SPEEDAM, June 20, 2012.
Diesel generator emulator
10 kVA
Simulated turbine and emulator comparison
DC/DC converter
0
70 50 30 10
Torq
ue
(Nm
)
. 5 10 15 20 25 30
70
50
30
10
t(sec)
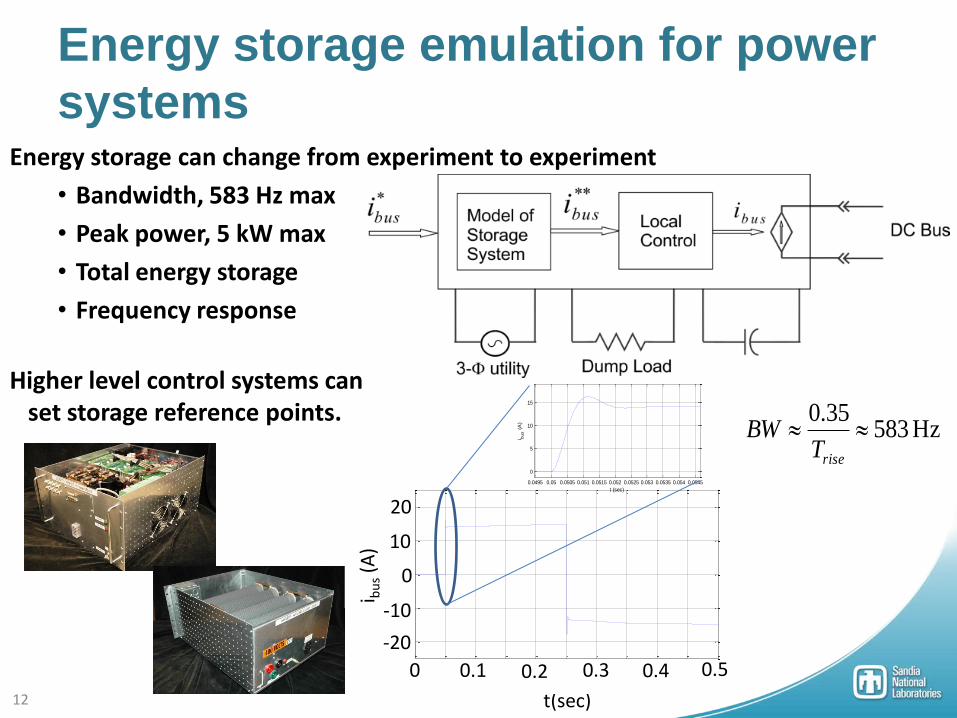
Energy storage emulation for power
systems Energy storage can change from experiment to experiment
• Bandwidth, 583 Hz max
• Peak power, 5 kW max
• Total energy storage
• Frequency response
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
-20
-10
0
10
20
t (sec)
i bus (
A)
Hz 58335.0
riseT
BW
0.0495 0.05 0.0505 0.051 0.0515 0.052 0.0525 0.053 0.0535 0.054 0.0545
0
5
10
15
t (sec)
i bus (
A)
Higher level control systems can set storage reference points.
t(sec)
20
10
0
-10
-20
i bu
s (A
)
0 0.1 0.2 0.3 0.4 0.5
12
0 2 4 6 8 10 12 14 16 18 200
2
4
6
8
10
12
14
16
18
20
Time (s)
Curr
ent
(A)
Hardware data
Model
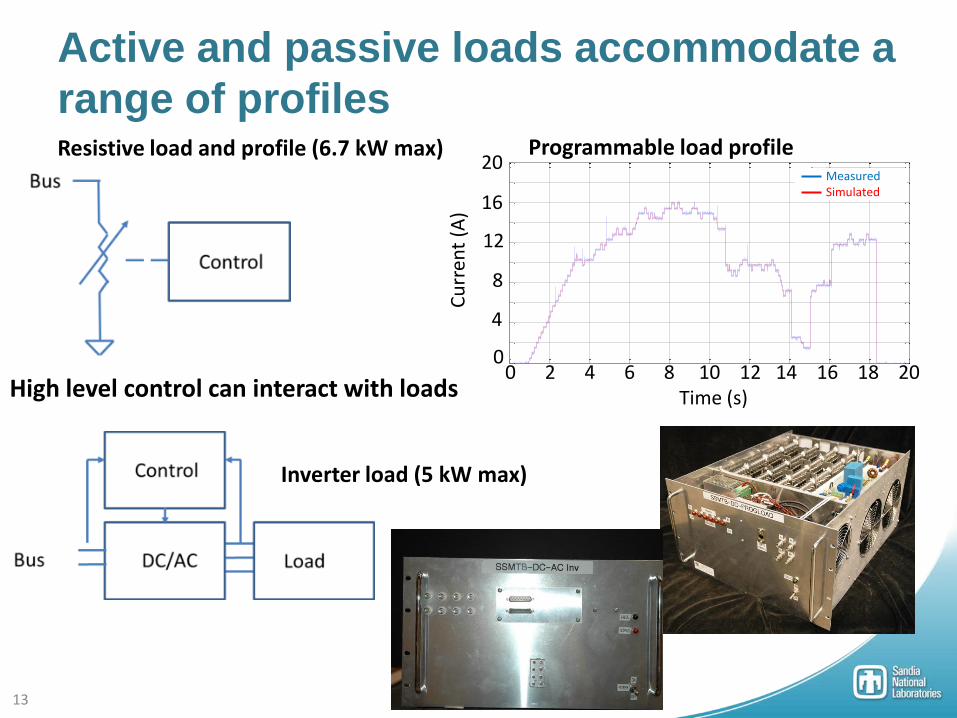
Active and passive loads accommodate a
range of profiles Resistive load and profile (6.7 kW max)
Inverter load (5 kW max)
High level control can interact with loads
Programmable load profile
Cu
rren
t (A
)
0 0 2 4 6 8 10 12 14 16 18 20
Time (s)
4
8
12
16
20 Measured Simulated
13
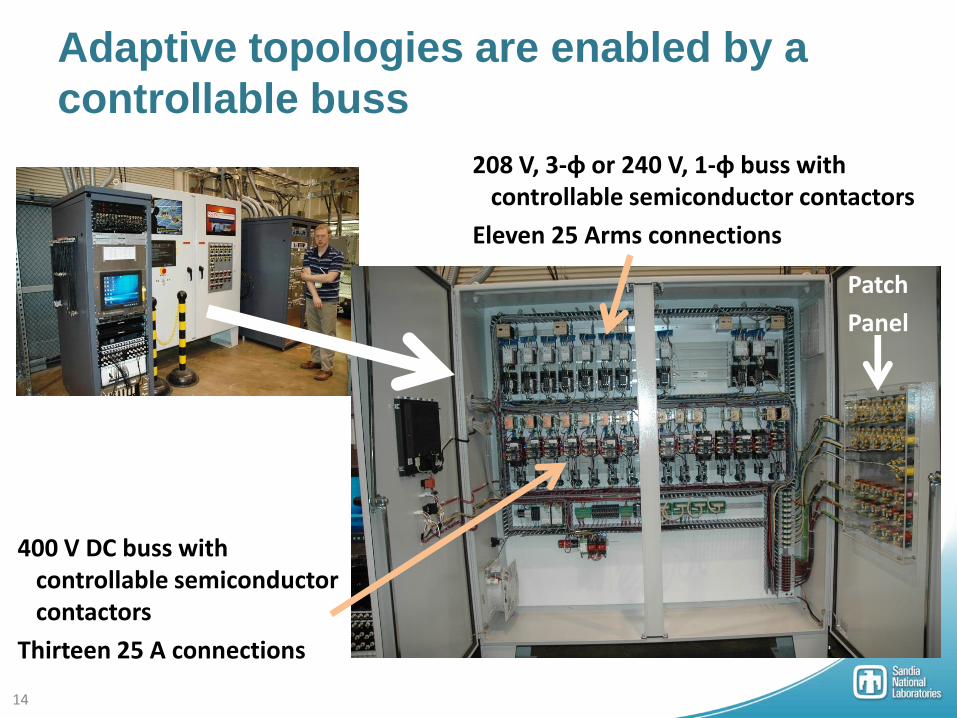
Adaptive topologies are enabled by a
controllable buss
208 V, 3-φ or 240 V, 1-φ buss with controllable semiconductor contactors
Eleven 25 Arms connections
400 V DC buss with controllable semiconductor contactors
Thirteen 25 A connections
Patch
Panel
14
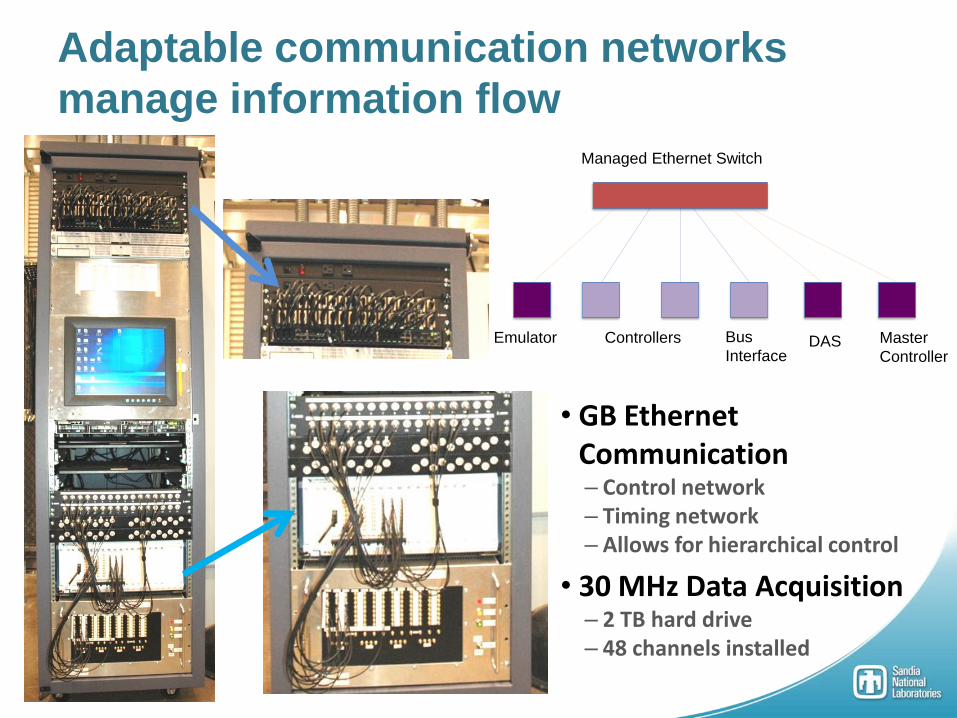
Adaptable communication networks
manage information flow
• GB Ethernet Communication – Control network – Timing network – Allows for hierarchical control
• 30 MHz Data Acquisition – 2 TB hard drive – 48 channels installed
Managed Ethernet Switch
Controllers Bus
InterfaceDAS Master
Controller
Emulator
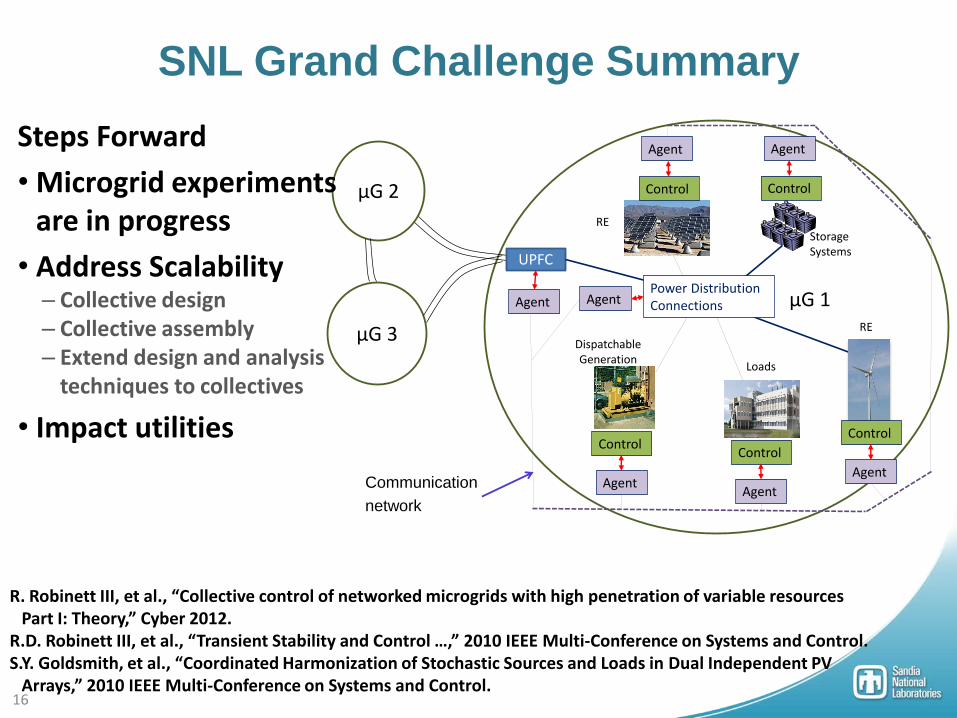
SNL Grand Challenge Summary
UPFC
Power DistributionConnectionsAgent
Control
Agent
Control
Agent
Control
Agent
Control
Agent
Agent
Loads
StorageSystems
DispatchableGeneration
RE
Control
Agent
RE
µG 2
µG 3
µG 1
Communication
network
Steps Forward
• Microgrid experiments are in progress
• Address Scalability – Collective design – Collective assembly – Extend design and analysis
techniques to collectives
• Impact utilities
R. Robinett III, et al., “Collective control of networked microgrids with high penetration of variable resources Part I: Theory,” Cyber 2012.
R.D. Robinett III, et al., “Transient Stability and Control …,” 2010 IEEE Multi-Conference on Systems and Control. S.Y. Goldsmith, et al., “Coordinated Harmonization of Stochastic Sources and Loads in Dual Independent PV
Arrays,” 2010 IEEE Multi-Conference on Systems and Control. 16
Should We Standardize?
• Standardizing on a microgrid system architecture could help to lower costs and to increase reliability/performance.
• “Openness” will keep market entrance barriers low, competition high, and innovation high.
Cost Performance
What Do I Mean By an Open
Architecture? • A system where design information is specified and available,
performance meets minimum standards, and it is relatively easy for a third party to upgrade or modify the system.
• The elements of an Open Architecture include the following:
– Transparency: The ability for public to observe hardware schematics, software
codes, protocol definitions, etc.
– Standardized I/O and Performance: These describe the inputs, outputs, functionality, and performance of a ‘black box’ component.
– Reconfigurability: The ability to make limited changes to internal parameters of a microgrid device.
– Extensibility: Ability to extend a device’s functionality using software or hardware.
– Plug-and-Play: The ability of a device to self-register and automatically configure itself when connected to the microgrid system.
Do We Need an Open Architecture?
•An Open Architecture will: – Increase competition –Spur creativity –Reduce cost – Increase reliability – Increase security –Allow consumers to know the following system parameters and the
tradeoffs between them • Cost • Function • Scalability and extensibility • Performance • Information flow • Required assets
Component Interface Control
Document (ICD)
• ICD is term that is used to define a part of an open architecture: the requirements a component must meet in order to connect to the system
• There should be an ICD for every component in a microgrid
• The ICD should dictate transparency, standardization, I/O and functionality, reconfigurability, extensibility, plug-and-play of the component
Microgrid
Is it possible to guarantee system performance by specifying component ICD (without knowing the rest of the system)? No, it’s not
What Might be Specified in an ICD?
• Interoperability requirements
• Plug-and-play requirements, component registration details
• Communications: latency, time stamping, protocols, etc
• Telemetry: phase lag, cyber security, sample methods (where important)
• Performance and withstand characteristics: – Power, frequency, voltage, harmonics, flicker, V/Hz, P/Hz, P/V
• State observability and controllability
• Control methods and objectives (low, mid, and high level controls)
• Failure responses (self failure or system failure)
Do We Care About Component or
System Performance? • We care about component performance because it leads to
system performance.
• To a LARGER degree, we care about system performance- or performance “at the load”.
Reference Architecture Spectrum
High Cost High Complexity
High Functionality
Low Cost Low Complexity Low Functionality
We may want to consider two reference systems in order to avoid unnecessarily over-designing components
Microgrid Reference Architecture
• In order to guarantee component performance, one must know the system. –Are there any elements with unspecified performance in the
system? –Are we seeking “gold plated”, “silver plated”, or “bronze
plated” performance? –Do seek differentiated performance within the same
system? –Is this a legacy system, or is all equipment new? –Is this an AC, DC, or AC/DC hybrid system? –More questions like these…
•Answers to the above questions will influence how the ICDs should be specified
Control Requirements Influence
Everything •Distributed and centralized control (not versus)
•Plug and play registration and interoperability
•The manner in which hardware is controlled, affects its performance and reliability
•Communications and protocols are central to controls
•The need for state observability and controllability affects the component design
• Fail-safe methods
The point: One cannot create the ICDs independent of the controls
What Types of Open Architecture
Standards Are Needed for Microgrids?
• Transparency
• I/O and functionality for systems and components
• Reconfigurability
• Scalability and extensibility
• Control Design, plug-and-play
• Physical device performance
• Communication
• Reference system
• Reliability
• Function and Performance
• Interoperability
• Security
• Connectivity to the bulk grid
• Re-application of MG technologies into the ‘Smart Grid’

BACK UP
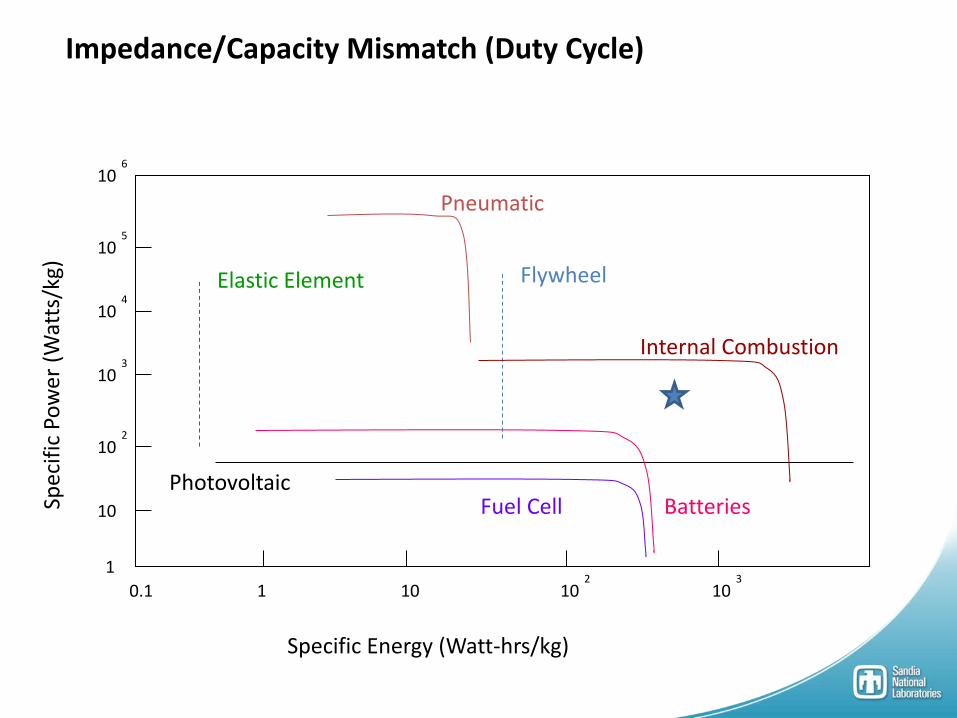
Impedance/Capacity Mismatch (Duty Cycle)
1
10
10
10
10
10
10
10 1 10 10 10 0.1
2
3
4
5
6
2 3 4
Specific Energy (Watt-hrs/kg)
Elastic Element
Pneumatic
Flywheel
Photovoltaic Batteries
Internal Combustion
Fuel Cell
)()()()( xVxVxTxTH cc
xVxVxTxTH cc
dtHdtVVTTJI cc 88
i
N
i icc
Hm
HdtHdtJI cc
1
00
1 where,0][
8][
1
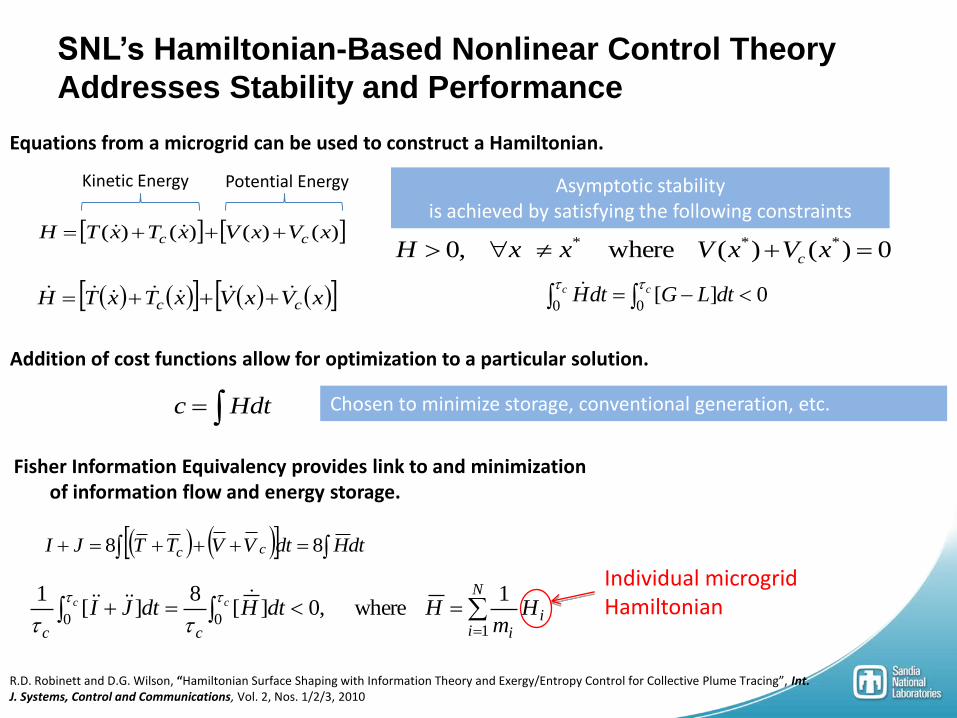
SNL’s Hamiltonian-Based Nonlinear Control Theory
Addresses Stability and Performance
Equations from a microgrid can be used to construct a Hamiltonian.
Asymptotic stability is achieved by satisfying the following constraints
Fisher Information Equivalency provides link to and minimization of information flow and energy storage.
Hdtc
Individual microgrid Hamiltonian
Addition of cost functions allow for optimization to a particular solution.
Chosen to minimize storage, conventional generation, etc.
Kinetic Energy Potential Energy
0][00
dtLGdtH cc
0)()(where ,0 *** xVxVxxH c
R.D. Robinett and D.G. Wilson, “Hamiltonian Surface Shaping with Information Theory and Exergy/Entropy Control for Collective Plume Tracing”, Int. J. Systems, Control and Communications, Vol. 2, Nos. 1/2/3, 2010
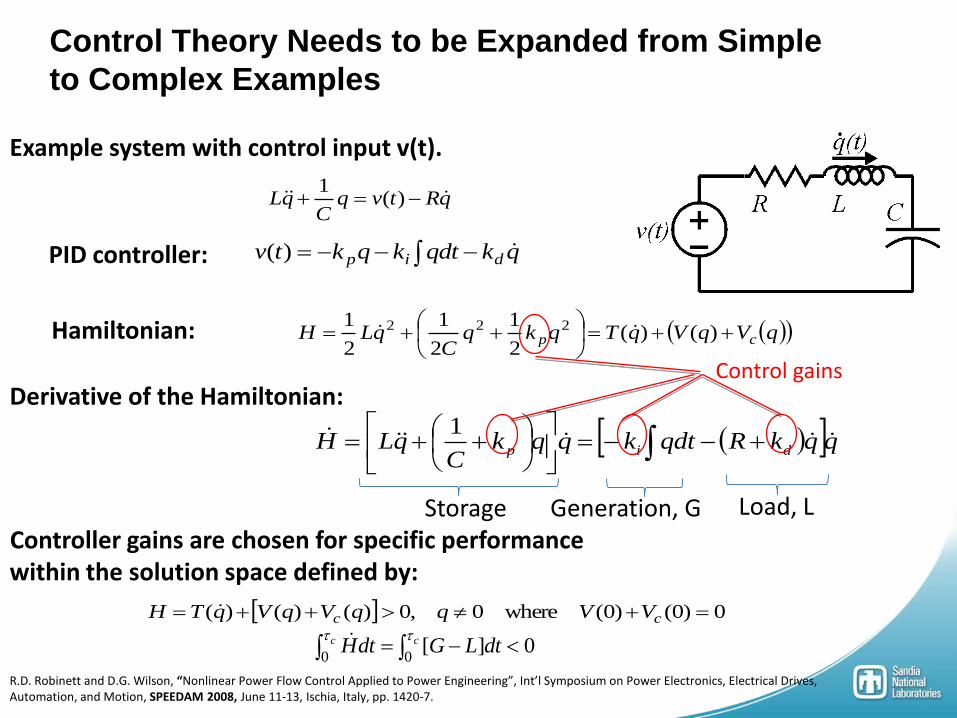
Control Theory Needs to be Expanded from Simple
to Complex Examples
Example system with control input v(t).
qkqdtkqktv dip )(
qRtvqC
qL )(1
qqkRqdtkqqkC
qLH dip
1
qVqVqTqkqC
qLH cp
)()(
2
1
2
1
2
1 222
Storage Load, L Generation, G
Control gains
PID controller:
Hamiltonian:
Derivative of the Hamiltonian:
Controller gains are chosen for specific performance within the solution space defined by:
0)0()0(where0 ,0)()()( cc VVqqVqVqTH
0][00
dtLGdtH cc
R.D. Robinett and D.G. Wilson, “Nonlinear Power Flow Control Applied to Power Engineering”, Int’l Symposium on Power Electronics, Electrical Drives, Automation, and Motion, SPEEDAM 2008, June 11-13, Ischia, Italy, pp. 1420-7.