science fair 5th powerpoint
TRANSCRIPT
ROBOTICSBY ARNAV RASTOGI
Why robots should do what we do today
Advantages Disadvantages
Less mistakes More precise Can do many things
faster Can do dangerous jobs Can work 24 hours a
day Does not require food or
water Can multitask
Extremely high capital cost
Can malfunction Can not be programmed
for every scenario Can not think creatively Can get rusted Has many moving parts
that can stop working
Uses of robots
In hospitals for surgery In factories to make vehicles, toys,
electronics, and silverware In the military as robots that detect
mines and etc. In homes for entertainment and for
cleaning
George DevolGeorge Devol made the first industrial robot in 1954.
Famous robots
Honda ASIMO robot Roomba Space exploration robots Pneubots Robot grrl Robot brrd
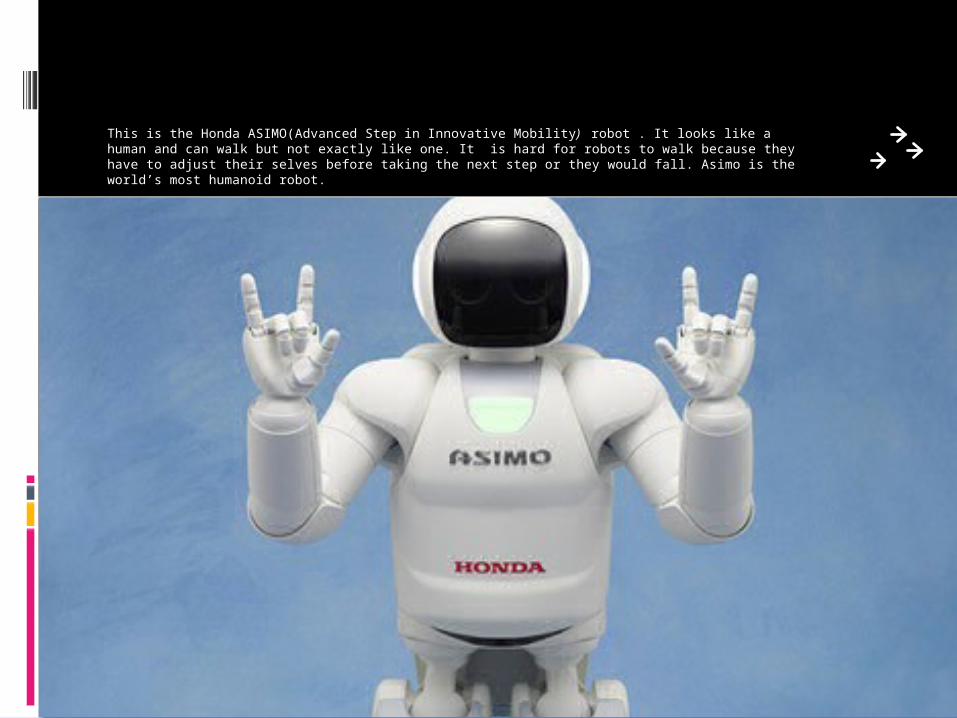
This is the Honda ASIMO(Advanced Step in Innovative Mobility) robot . It looks like a human and can walk but not exactly like one. It is hard for robots to walk because they have to adjust their selves before taking the next step or they would fall. Asimo is the world’s most humanoid robot.
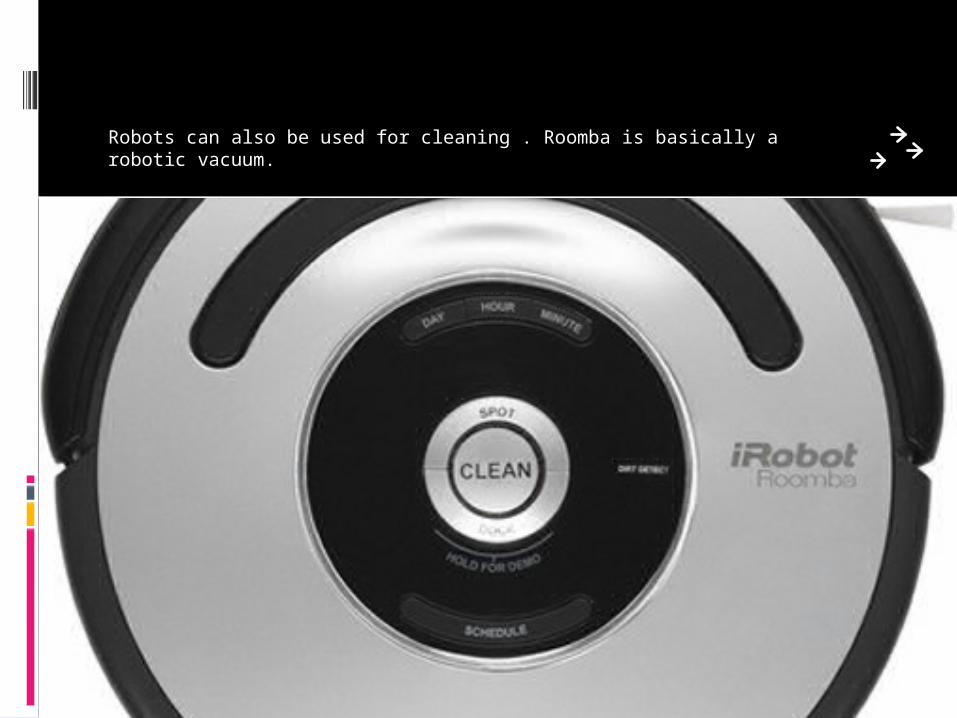
Robots can also be used for cleaning . Roomba is basically a robotic vacuum.
Types of robots
Humanoid robots Robotic arms Space exploration robots
Parts of a robot
Processor/ microprocessor Sensor/detector- eye, pressure
sensor, smoke detector, etc. Actuator(something that makes it do
something) Power source

Processor A processor is the part of a computer/robot that processes the information.

SensorA sensor is something that senses something and reports it to the processor. A smoke detector is a sensor that senses smoke.
ActuatorAn actuator is something that makes the robot do something. Like a motor, it makes the robot move.
Power sources
Battery Wind Hydroelectric Nuclear Power outlet
Sources
Wikipedia Robotics Discover the Science and Technology of
the Future

Thank you for viewing my presentation.