rtmsc2015 group4
TRANSCRIPT

配送ロボット
RTミドルウェアサマーキャンプ2015
グループ 4大間章央 内藤隆 安田公和

動機
When 部品が必要なときWhere 工場内でWho 作業者がWhat 部品をWhy 自動的に配送してほしいHow ロボットで
→配送ロボットをつくろう!

• ロボット +制御 PCがレーザーレンジファインダを用いて地図作成および経路生成を行い、指定した地点まで自律移動する (工場内の部品配送を想定 )
• GUIで地図作成モードと経路生成モードを切り替える
• 管制 PCにロボットの情報 (現在位置および現在速度 )を常時送信
• 管制 PCからも遠隔操作可能 (ジョイスティックによる操作 )
概要
管制 PC ロボット制御 PC
ロボット現在位置および現在速度送信
ジョイスティックによる遠隔操作

要求図ユーザーが指定した目的地まで移動すること
自律移動
移動ロボットが使用するグリッド地図の
管理を行う
地図情報管理移動ロボットが使用するグリッド地図の
管理を行う
経路生成
移動ロボットが2点間移動を行
う
グローバル経路生成
移動ロボットの走行を制御
走行制御
移動ロボットの姿勢を制御
自己姿勢推定移動ロボットが使用するグリッド地図の
管理を行う
ロボットの情報提示移動ロボットが使用するグリッド地図の
管理を行う
ロボットへの指令伝達
2点間移動地図保存
走行不能箇所の検出
モーター制御 自己位置推定 ネットワーク GUI ネットワーク
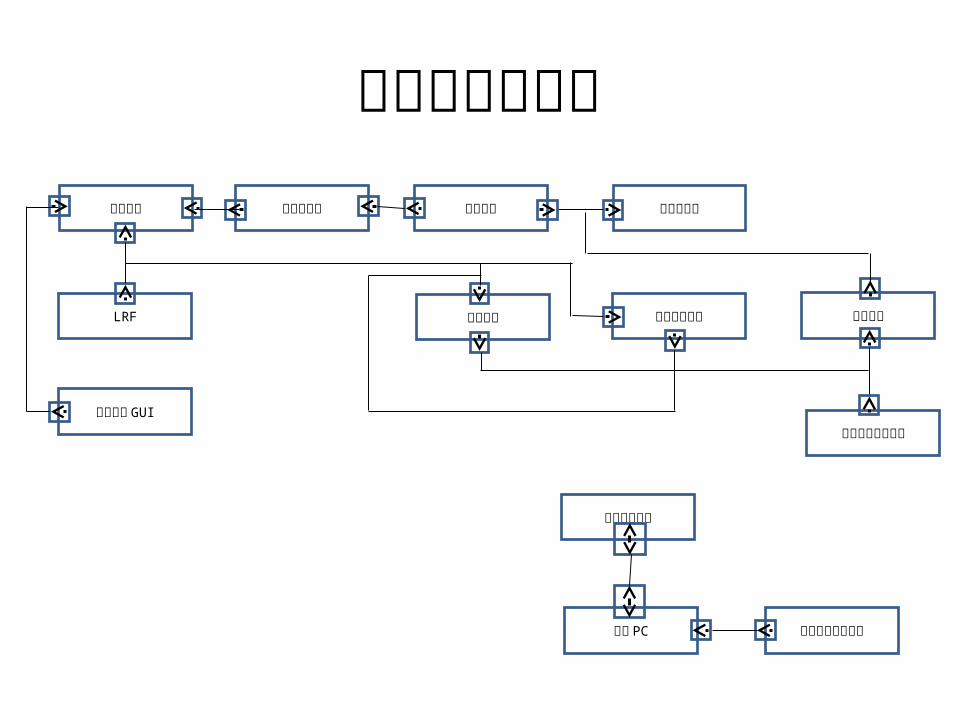
内部ブロック図
ロボットオドメトリ
速度指定LRF
地図表示 GUI
経路生成 自己位置推定
地図作成
ジョイスティック
ネットワーク
管制 PC ジョイスティック
モータ制御

モード切り替え GUI
• Visual C++で地図作成と経路生成を切り替える GUIを作成
• RTコンポーネントはあらかじめ activateしておく
• rtshellのコマンドを利用して必要なコンポーネントの connect/disconnectするバッチファイルを実行

• 地図生成モード移行バッチファイル
バッチファイル (一部 )

RTコンポーネント接続図
• ロボット制御 PC 地図作成モード

RTコンポーネント接続図
• ロボット制御 PC 経路生成モード

RTコンポーネント接続図
• 管制 PC

地図生成の様子

まとめ
• RTコンポーネントの再利用で地図作成および経路生成を実現した
• 制御 PCから管制 PCへ情報送信を実現した• 管制 PCからのロボットの遠隔操作を実現した
• rtshellを用いて必要なコンポーネントをconnect/disconnectし、地図作成と経路生成の機能切り替えを実現した

謝辞
講師の皆様5日間懇切丁寧に RTミドルウェアをご指導いただきまして、誠にありがとうございました。サマーキャンプで学習した内容を活かして、今後のロボット開発に邁進いたします。