robotique mobile -...
TRANSCRIPT

Robotique mobile
Robotique mobile
Bernard BAYLEhttp://eavr.u-strasbg.fr/~bernard
Télécom Physique Strasbourg 3A, option ISAV, master IRIV

Robotique mobile
Introduction
Quels robots mobiles ?
DéfinitionRobots mobiles = robots à base mobile, par opposition aux robotsmanipulateurs.
ClassificationLe plus souvent robots mobiles = robots à roues, sinon on précise le type delocomotion.

Robotique mobile
Introduction
Quels robots mobiles ?
DéfinitionRobots mobiles = robots à base mobile, par opposition aux robotsmanipulateurs.
Classification
Robots marcheurs

Robotique mobile
Introduction
Quels robots mobiles ?
DéfinitionRobots mobiles = robots à base mobile, par opposition aux robotsmanipulateurs.
Classification
Robots sous-marins

Robotique mobile
Introduction
Quels robots mobiles ?
DéfinitionRobots mobiles = robots à base mobile, par opposition aux robotsmanipulateurs.
Classification
Robots aériens

Robotique mobile
Introduction
Histoire des robots mobiles à roues
Historique
Shakey : le premier robot mobile (SRI, 1966-1972)http://www.sri.com/about/timeline/shakey.html

Robotique mobile
Introduction
Histoire des robots mobiles à roues
Historique
Shakey : le premier robot mobile (SRI, 1966-1972)http://www.sri.com/about/timeline/shakey.html

Robotique mobile
Introduction
Histoire des robots mobiles à roues
Historique
Hilare : le premier robot mobile français (Laas, 1977)http://www.laas.fr/ matthieu/robots/hilare
Robotique mobile
Introduction
Les robots mobiles à roues aujourd’hui
Où sont-ils, que font-ils ?Peu d’applications industrielles utilisent des robots mobiles.
Chariot filoguidé en milieu industriel (FMC Technologies)http://www.fmcsgvs.com/index.htm

Robotique mobile
Introduction
Les robots mobiles à roues aujourd’hui
Où sont-ils, que font-ils ?Peu d’applications grand public utilisent des robots mobiles.
Aspirateur automatique Roomba (iRobot)http://www.irobot.com/consumer
Robotique mobile
Introduction
Les robots mobiles à roues aujourd’hui
Où sont-ils, que font-ils ?Quelques applications de pointe.
Sojourner sur Marshttp://mars.jpl.nasa.gov/MPF/rover/sojourner.html

Robotique mobile
Introduction
Les robots mobiles à roues aujourd’hui
Où sont-ils, que font-ils ?Quelques applications de pointe.
Inspection de ruineshttp://crasar.csee.usf.edu

Robotique mobile
Introduction
Pourquoi étudier les robots à roues ?
Presque toujours. . .
Robots mobiles à roues : robots dédiés à la recherche.
Intérêt(s) :beaucoup de problèmes encore à résoudre pour atteindre unenavigation robuste dans des espaces non structurés, en particulier enintérieuraugmenter les connaissances en termes de localisation et de navigationde systèmes autonomesproblèmes soulevés par le plus simple des robots mobiles à roues =sujet d’étude à part entière et base pour l’étude de systèmes mobilesplus complexes

Robotique mobile
Introduction
Problématiques (1)
Problèmes en robotique mobile : aspects matériels
Choix :structure mécaniquemotorisation, alimentationarchitecture informatique du système de contrôle/commande
Choix classique
Choix de structure souvent effectué parmi un panel de solutions connues etpour lesquelles les problèmes de modélisation, planification et commandesont résolus.
Choix classique des actionneurs et de l’alimentation : moteurs électriques àcourant continu avec ou sans collecteur, alimentés par des convertisseurs depuissance fonctionnant sur batterie.

Robotique mobile
Introduction
Problématiques (2)
Problèmes en robotique mobile : aspect logiciel
Généralement :architectures de contrôle-commande des robots mobiles similaires àcelles des systèmes automatiques ou robotiques plus classiques dansl’ensemblenéanmoins deux niveaux de spécialisation, propres aux systèmesautonomes :
couche décisionnelle (planification et gestion des évènements)couche fonctionnelle (génération en temps-réel des commandes desactionneurs)

Robotique mobile
Introduction
Objectifs du cours
But du coursProblèmes spécifiques à la robotique mobile : outils pour faire évoluer lerobot dans son environnement (suivre un chemin connu, aller d’un point à unautre, réagir à la présence d’un obstacle, etc.).
MéthodeVue d’ensemble des problèmes liés à la modélisation, la perception et lanavigation des robots mobiles :
problématiquesétat de l’Art (bibliographie)problèmes ouverts
Robotique mobile
Introduction
Objectifs du cours
But du coursProblèmes spécifiques à la robotique mobile : outils pour faire évoluer lerobot dans son environnement (suivre un chemin connu, aller d’un point à unautre, réagir à la présence d’un obstacle, etc.).
Cadre de l’étudeLimitations :
robots mobiles à roues à châssis non articulé évoluant sur sol planproblèmes associés à la génération de mouvements autonomes :modélisation, perception, navigation

Robotique mobile
Introduction
Evaluation
EvaluationEtude et présentation d’articles de recherche.

Robotique mobile
Modélisation
Plan
1 Introduction
2 ModélisationDéfinitionsRoulement sans glissement et contraintes non holonômesLes grandes classes de robots mobiles et leurs modèlesReprésentation d’état et commandabilité
3 PerceptionCapteurs en robotique mobileLocalisationConstruction de carte
4 NavigationProblématiques et approchesPlanification de cheminExecution du mouvement
Robotique mobile
Modélisation
Définitions
Plan
1 Introduction
2 ModélisationDéfinitionsRoulement sans glissement et contraintes non holonômesLes grandes classes de robots mobiles et leurs modèlesReprésentation d’état et commandabilité
3 PerceptionCapteurs en robotique mobileLocalisationConstruction de carte
4 NavigationProblématiques et approchesPlanification de cheminExecution du mouvement

Robotique mobile
Modélisation
Définitions
Mise en place des repères
�x �
�y �
O�x
x
yO� θ
�y
R = (O, �x , �y , �z) : repère fixe quelconque, avec �z est vertical.R� = (O�, �x �, �y �, �z�) : repère mobile lié au robot.

Robotique mobile
Modélisation
Définitions
Vocabulaire (1)
DéfinitionPar analogie avec la manipulation, on appelle posture [Campion 96] du robotle vecteur :
ξ =
xyθ
,
où x et y sont respectivement l’abscisse et l’ordonnée du point O� dans R etθ l’angle (�x , �x �).
. . . définie sur un espace M de dimension m = 3, comparable à l’espaceopérationnel d’un manipulateur plan.

Robotique mobile
Modélisation
Définitions
Vocabulaire (2)
DéfinitionLa configuration du robot mobile est connue quand la position de tous sespoints dans un repère donné est connue.
Notion ambigüe pour les robots mobiles. Dans tous les cas :
q =
q1
q2
. . .qn
de n coordonnées appelées coordonnées généralisées.
. . . définie sur un espace N de dimension n, appelée l’espace desconfigurations.

Robotique mobile
Modélisation
Roulement sans glissement et contraintes non holonômes
Plan
1 Introduction
2 ModélisationDéfinitionsRoulement sans glissement et contraintes non holonômesLes grandes classes de robots mobiles et leurs modèlesReprésentation d’état et commandabilité
3 PerceptionCapteurs en robotique mobileLocalisationConstruction de carte
4 NavigationProblématiques et approchesPlanification de cheminExecution du mouvement
Robotique mobile
Modélisation
Roulement sans glissement et contraintes non holonômes
Roulement sans glissement (1)
Comment roule un robot ?Mouvement grâce à la friction au contact entre roue et sol : dans de bonnesconditions, il y a roulement sans glissement (r.s.g.) de la roue sur le sol.
Hypothèses :contact roue/sol ponctuelroues sont indéformables, de rayon r
En pratique :contact sur une surface : glissementsroues pleines indéformables, plus vrai avec des pneusimperfections considérées ssi elles affectent les performances(odométrie)

Robotique mobile
Modélisation
Roulement sans glissement et contraintes non holonômes
Roulement sans glissement (2)
�z
�y
�ω
�vP
xO
ϕ
P
Q
�x �
θ
�x
y
Nullité de la vitesse relative roue/sol
�vQ = �vP + �ω ∧−→PQ = �0

Nullité de la vitesse relative roue/sol
On a �vP + �ω ∧−→PQ = �0, soit :
x�x + y�y + (θ�z + ϕ(sin θ�x − cos θ�y)) ∧ (−r�z) = �0
(x + r ϕ cos θ)�x + (y + r ϕ sin θ)�y = �0
d’où :
x + r ϕ cos θ = 0y + r ϕ sin θ = 0
Plan de la roue et plan normal à la roue :
x cos θ + y sin θ = −r ϕ−x sin θ + y cos θ = 0

Nullité de la vitesse relative roue/sol
On a �vP + �ω ∧−→PQ = �0, soit :
x�x + y�y + (θ�z + ϕ(sin θ�x − cos θ�y)) ∧ (−r�z) = �0
(x + r ϕ cos θ)�x + (y + r ϕ sin θ)�y = �0
d’où :
x + r ϕ cos θ = 0y + r ϕ sin θ = 0
Plan de la roue et plan normal à la roue :
x cos θ + y sin θ = −r ϕ−x sin θ + y cos θ = 0

Nullité de la vitesse relative roue/sol
On a �vP + �ω ∧−→PQ = �0, soit :
x�x + y�y + (θ�z + ϕ(sin θ�x − cos θ�y)) ∧ (−r�z) = �0
(x + r ϕ cos θ)�x + (y + r ϕ sin θ)�y = �0
d’où :
x + r ϕ cos θ = 0y + r ϕ sin θ = 0
Plan de la roue et plan normal à la roue :
x cos θ + y sin θ = −r ϕ−x sin θ + y cos θ = 0

Nullité de la vitesse relative roue/sol
On a �vP + �ω ∧−→PQ = �0, soit :
x�x + y�y + (θ�z + ϕ(sin θ�x − cos θ�y)) ∧ (−r�z) = �0
(x + r ϕ cos θ)�x + (y + r ϕ sin θ)�y = �0
d’où :
x + r ϕ cos θ = 0y + r ϕ sin θ = 0
Plan de la roue et plan normal à la roue :
x cos θ + y sin θ = −r ϕ−x sin θ + y cos θ = 0

Nullité de la vitesse relative roue/sol
On a �vP + �ω ∧−→PQ = �0, soit :
x�x + y�y + (θ�z + ϕ(sin θ�x − cos θ�y)) ∧ (−r�z) = �0
(x + r ϕ cos θ)�x + (y + r ϕ sin θ)�y = �0
d’où :
x + r ϕ cos θ = 0y + r ϕ sin θ = 0
Plan de la roue et plan normal à la roue :
x cos θ + y sin θ = −r ϕ−x sin θ + y cos θ = 0
Robotique mobile
Modélisation
Roulement sans glissement et contraintes non holonômes
Contraintes non holonômes (1)
DéfinitionSoit un système de configuration q soumis à des contraintes indépendantessur les vitesses AT (q)q = 0.
S’il n’est pas possible d’intégrer l’une de ces contraintes, elle est dite nonintégrable ou non holonôme.
Contraintes non holonômes : certains mouvements instantanés interdits.
Robotique mobile
Modélisation
Roulement sans glissement et contraintes non holonômes
Contraintes non holonômes (2)
Théorème de FrobéniusSoit un système de configuration q, de dimension n, tq. AT (q)q = 0 et B(q)de rang plein m, orthogonale à A(q).
Soit l’algèbre de Lie Lie{b1(q) b2(q) . . .bm(q) . . .bp(q)}, de dimension p,avec m � p � n.
Alors, n − p contraintes sont intégrables.

Robotique mobile
Modélisation
Roulement sans glissement et contraintes non holonômes
Contraintes non holonômes (2)
Théorème de FrobéniusSoit un système de configuration q, de dimension n, tq. AT (q)q = 0 et B(q)de rang plein m, orthogonale à A(q).
Soit l’algèbre de Lie Lie{b1(q) b2(q) . . .bm(q) . . .bp(q)}, de dimension p,avec m � p � n.
Alors, n − p contraintes sont intégrables.
Crochet de LieCrochet de Lie de bi(q) et bj(q) :
[bi(q),bj(q)] =∂bj
∂qbi −
∂bi
∂qbj .

Robotique mobile
Modélisation
Roulement sans glissement et contraintes non holonômes
Contraintes non holonômes (2)
Théorème de FrobéniusSoit un système de configuration q, de dimension n, tq. AT (q)q = 0 et B(q)de rang plein m, orthogonale à A(q).
Soit l’algèbre de Lie Lie{b1(q) b2(q) . . .bm(q) . . .bp(q)}, de dimension p,avec m � p � n.
Alors, n − p contraintes sont intégrables.
Algèbre de Lie
Algèbre engendrée par les colonnes et les crochets successifs formés àpartir de ces colonnes, à condition qu’ils augmentent la dimension del’algèbre.

Cas de la roue
−x sin θ + y cos θ = 0x cos θ + y sin θ = −r ϕ
AT (q)q = 0, avec A(q) =
− sin θ cos θcos θ sin θ
0 00 r
et :
AT (q)B(q) = 0, avec B(q) =
cos θ 0sin θ 0
0 1− 1
r 0

Cas de la roue
−x sin θ + y cos θ = 0x cos θ + y sin θ = −r ϕ
AT (q)q = 0, avec A(q) =
− sin θ cos θcos θ sin θ
0 00 r
et :
AT (q)B(q) = 0, avec B(q) =
cos θ 0sin θ 0
0 1− 1
r 0

Cas de la roue
−x sin θ + y cos θ = 0x cos θ + y sin θ = −r ϕ
AT (q)q = 0, avec A(q) =
− sin θ cos θcos θ sin θ
0 00 r
et :
AT (q)B(q) = 0, avec B(q) =
cos θ 0sin θ 0
0 1− 1
r 0

Crochets de Lie successifs pour la roue
A partir de b1(q) et b2(q) :
b3 =
�b1(q),b2(q)
�=
(sin θ − cos θ 0 0)T
�b1(q),
�b1(q),b2(q)
��= 0
b4 =�b2(q),
�b1(q),b2(q)
��= (cos θ sin θ 0 0)T
Lie{b1 b2 b3 b4} est une algèbre de Lie de dimension 4, égale à celle de q.
Comme n = 4 et p = 4, il n’existe pas de contrainte intégrable : les deuxcontraintes sont non holonômes.

Crochets de Lie successifs pour la roue
A partir de b1(q) et b2(q) :
b3 =�b1(q),b2(q)
�= (sin θ − cos θ 0 0)T
�b1(q),
�b1(q),b2(q)
��= 0
b4 =�b2(q),
�b1(q),b2(q)
��= (cos θ sin θ 0 0)T
Lie{b1 b2 b3 b4} est une algèbre de Lie de dimension 4, égale à celle de q.
Comme n = 4 et p = 4, il n’existe pas de contrainte intégrable : les deuxcontraintes sont non holonômes.

Crochets de Lie successifs pour la roue
A partir de b1(q) et b2(q) :
b3 =�b1(q),b2(q)
�= (sin θ − cos θ 0 0)T
�b1(q),
�b1(q),b2(q)
��=
0
b4 =�b2(q),
�b1(q),b2(q)
��= (cos θ sin θ 0 0)T
Lie{b1 b2 b3 b4} est une algèbre de Lie de dimension 4, égale à celle de q.
Comme n = 4 et p = 4, il n’existe pas de contrainte intégrable : les deuxcontraintes sont non holonômes.

Crochets de Lie successifs pour la roue
A partir de b1(q) et b2(q) :
b3 =�b1(q),b2(q)
�= (sin θ − cos θ 0 0)T
�b1(q),
�b1(q),b2(q)
��= 0
b4 =�b2(q),
�b1(q),b2(q)
��= (cos θ sin θ 0 0)T
Lie{b1 b2 b3 b4} est une algèbre de Lie de dimension 4, égale à celle de q.
Comme n = 4 et p = 4, il n’existe pas de contrainte intégrable : les deuxcontraintes sont non holonômes.

Crochets de Lie successifs pour la roue
A partir de b1(q) et b2(q) :
b3 =�b1(q),b2(q)
�= (sin θ − cos θ 0 0)T
�b1(q),
�b1(q),b2(q)
��= 0
b4 =
�b2(q),
�b1(q),b2(q)
��=
(cos θ sin θ 0 0)T
Lie{b1 b2 b3 b4} est une algèbre de Lie de dimension 4, égale à celle de q.
Comme n = 4 et p = 4, il n’existe pas de contrainte intégrable : les deuxcontraintes sont non holonômes.

Crochets de Lie successifs pour la roue
A partir de b1(q) et b2(q) :
b3 =�b1(q),b2(q)
�= (sin θ − cos θ 0 0)T
�b1(q),
�b1(q),b2(q)
��= 0
b4 =�b2(q),
�b1(q),b2(q)
��= (cos θ sin θ 0 0)T
Lie{b1 b2 b3 b4} est une algèbre de Lie de dimension 4, égale à celle de q.
Comme n = 4 et p = 4, il n’existe pas de contrainte intégrable : les deuxcontraintes sont non holonômes.

Crochets de Lie successifs pour la roue
A partir de b1(q) et b2(q) :
b3 =�b1(q),b2(q)
�= (sin θ − cos θ 0 0)T
�b1(q),
�b1(q),b2(q)
��= 0
b4 =�b2(q),
�b1(q),b2(q)
��= (cos θ sin θ 0 0)T
Lie{b1 b2 b3 b4} est une algèbre de Lie de dimension 4, égale à celle de q.
Comme n = 4 et p = 4, il n’existe pas de contrainte intégrable : les deuxcontraintes sont non holonômes.

Crochets de Lie successifs pour la roue
A partir de b1(q) et b2(q) :
b3 =�b1(q),b2(q)
�= (sin θ − cos θ 0 0)T
�b1(q),
�b1(q),b2(q)
��= 0
b4 =�b2(q),
�b1(q),b2(q)
��= (cos θ sin θ 0 0)T
Lie{b1 b2 b3 b4} est une algèbre de Lie de dimension 4, égale à celle de q.
Comme n = 4 et p = 4, il n’existe pas de contrainte intégrable : les deuxcontraintes sont non holonômes.
Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Plan
1 Introduction
2 ModélisationDéfinitionsRoulement sans glissement et contraintes non holonômesLes grandes classes de robots mobiles et leurs modèlesReprésentation d’état et commandabilité
3 PerceptionCapteurs en robotique mobileLocalisationConstruction de carte
4 NavigationProblématiques et approchesPlanification de cheminExecution du mouvement

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Les différentes roues
RouesCombinaison choix+disposition des roues : mode de locomotion propre.
Types de roues :les roues fixes : axe de rotation de direction constanteles roues centrées orientables : axe d’orientation passe par le centre dela roueles roues décentrées orientables (roues folles) : axe d’orientation nepasse pas par le centre de la roue

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Les différentes roues
RouesCombinaison choix+disposition des roues : mode de locomotion propre.
(b) Roues décentrées orientables
axe de rotation
axe d’orientation
(a) Roues fixes (axe d’orientation fixe)et roues centrées orientables

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Disposition des roues et cinématique
Disposition et blocage
Pour un ensemble de roues donné, toute disposition ne conduit pas à unesolution viable. Un mauvais choix peut limiter la mobilité du robot ouoccasionner d’éventuels blocages.
Centre instantané de rotationDisposition de roues viable : existence pour toutes les roues d’un uniquepoint de vitesse nulle autour duquel tourne le robot de façon instantanée : lecentre instantané de rotation (CIR).
Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Disposition des roues et cinématique
Disposition et blocage
Pour un ensemble de roues donné, toute disposition ne conduit pas à unesolution viable. Un mauvais choix peut limiter la mobilité du robot ouoccasionner d’éventuels blocages.
Centre instantané de rotationPoints de vitesse nulle sur l’axe de rotation des roues : le point d’intersectiondes axes de rotation des différentes roues doit être unique (limitation dunombre de solutions viables).

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Robots mobiles de type unicycle : description (1)
Description
Unicycle : robot actionné par deux roues indépendantes et possédantéventuellement un certain nombre de roues folles assurant sa stabilité.
O�x
x
yO�
θ
�y
Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Robots mobiles de type unicycle : description (2)
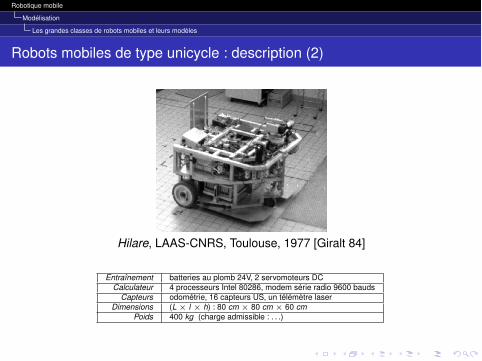
Hilare, LAAS-CNRS, Toulouse, 1977 [Giralt 84]
Entraînement batteries au plomb 24V, 2 servomoteurs DCCalculateur 4 processeurs Intel 80286, modem série radio 9600 bauds
Capteurs odométrie, 16 capteurs US, un télémètre laserDimensions (L × l × h) : 80 cm × 80 cm × 60 cm
Poids 400 kg (charge admissible : . . .)

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Robots mobiles de type unicycle : description (3)
Pioneer P3-DX, ActiveMedia Robotics, 2004 [ActivMedia 04]
Entraînement batteries 252 Wh, 2 servomoteurs DCCalculateur micro-contrôleur Hitachi HS-8, I/O Bus, 2 ports série
Capteurs odométrie, 8 capteurs US en façade +options : bumpers, télémètre laser, gyroscope, etc.
Autonomie 24 − 30 hVitesse maximum 1, 6 m/s
Dimensions (L × l × h) : 44 cm × 38 × 22 cmPoids 9 kg (charge admissible : 23 kg)
Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Robots mobiles de type unicycle : description (4)
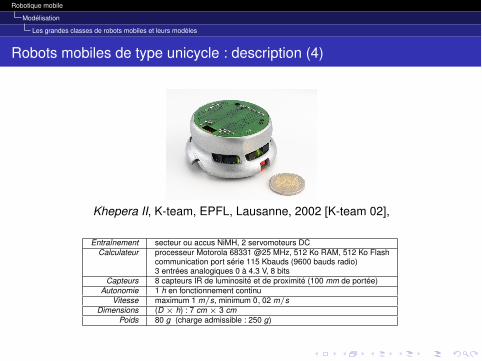
Khepera II, K-team, EPFL, Lausanne, 2002 [K-team 02],
Entraînement secteur ou accus NiMH, 2 servomoteurs DCCalculateur processeur Motorola 68331 @25 MHz, 512 Ko RAM, 512 Ko Flash
communication port série 115 Kbauds (9600 bauds radio)3 entrées analogiques 0 à 4.3 V, 8 bits
Capteurs 8 capteurs IR de luminosité et de proximité (100 mm de portée)Autonomie 1 h en fonctionnement continu
Vitesse maximum 1 m/s, minimum 0, 02 m/sDimensions (D × h) : 7 cm × 3 cm
Poids 80 g (charge admissible : 250 g)

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Robots mobiles de type unicycle : cinématique (1)
O
�y
�xx
y
CIR
O�
L
ρ
ω
ϕd
ϕg
θ
v
vd
vg
Vitesses roues droite et gauche( !convention des angles) :
vd = −r ϕd = (ρ+ L)ωvg = r ϕg = (ρ− L)ω
d’où :
ρ = Lϕd − ϕg
ϕd + ϕg
ω =−r(ϕd + ϕg)
2L

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Robots mobiles de type unicycle : cinématique (2)
Choix du vecteur de commande : équivalence entre vitesses
(ϕd , ϕg) ↔ (v , ω) avec v vitesse longitudinale du robot (en O�) et ω vitessede rotation (autour de O�) :
v =vd + vg
2=
r(ϕg − ϕd )2
ω =−r(ϕd + ϕg)
2L
Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Robots mobiles de type tricycle : description
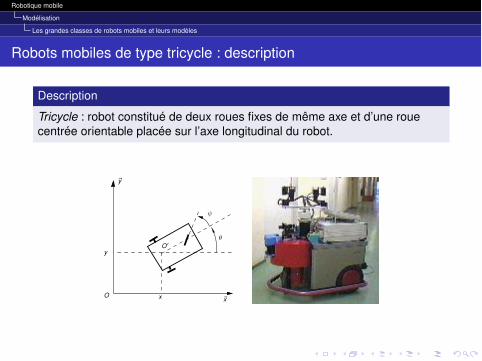
Description
Tricycle : robot constitué de deux roues fixes de même axe et d’une rouecentrée orientable placée sur l’axe longitudinal du robot.
O�x
O�
y
x
θ
ψ
�y

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Robots mobiles de type voiture : description
Description
Voiture : très similaire à celui du tricycle. La différence se situe au niveau dutrain avant, qui comporte deux roues au lieu d’une.

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Robots mobiles de type tricycle : cinématique
D
O�x
O�
y
x
θ
ρ
ψCIR ω
�y
ρ =D
tanψ
ω =vD
tanψ

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Robots mobiles de type voiture : cinématique
CIR
braquage différentielroues avant avec
roue avant dutricycle équivalent
Braquage différentiel (dit d’Ackerman)

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Robots mobiles omnidirectionnels : description
Description
Robot mobile omnidirectionnel : on peut agir indépendamment sur lesvitesses de translation selon les axes �x , �y et de rotation, autour de �z.
�y
y
θ
O�
ou roues décentrées orientablesroues suédoises
xO
�x

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Modèles des robots mobiles (1)
Modèle cinématique en posture
But : relier la dérivée de la posture et la commande
ξ = C(q)u

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Modèles des robots mobiles (1)
Modèle cinématique en posture de l’unicycle
x = v cos θy = v sin θ
θ = ω
soit :
ξ =
cos θ 0sin θ 0
0 1
�
vω
�

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Modèles des robots mobiles (2)
Modèle cinématique en configuration
But : relier la dérivée de la configuration et la commande.
PréalableSavoir définir la configuration.

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Modèles des robots mobiles (2)
Modèle cinématique en configuration
But : relier la dérivée de la configuration et la commande.
PréalableSavoir définir la configuration.

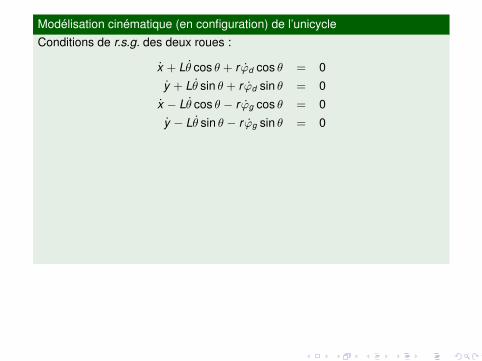
Modélisation cinématique (en configuration) de l’unicycleConditions de r.s.g. des deux roues :
Modélisation cinématique (en configuration) de l’unicycleConditions de r.s.g. des deux roues :
x + Lθ cos θ + r ϕd cos θ = 0y + Lθ sin θ + r ϕd sin θ = 0
x − Lθ cos θ − r ϕg cos θ = 0y − Lθ sin θ − r ϕg sin θ = 0

Modélisation cinématique (en configuration) de l’unicycleAvec q = (x y θ ϕd ϕg)T :
1 0 L cos θ r cos θ 00 1 L sin θ r sin θ 01 0 −L cos θ 0 −r cos θ0 1 −L sin θ 0 −r sin θ
xyθϕd
ϕg
= 0
soit :AT (q)q = 0
On constate que AT (q) n’est pas de rang plein.

Modélisation cinématique (en configuration) de l’unicycleSans perte d’information on réécrit les contraintes :
1 0 L cos θ r cos θ 00 1 L sin θ r sin θ 01 0 −L cos θ 0 −r cos θ
xyθϕd
ϕg
= 0

Modélisation cinématique (en configuration) de l’unicyclePar ailleurs :
θ =−r(ϕd + ˙ϕg)
2Lqui s’intègre en :
θ =−r(ϕd + ϕg)
2L+ θ0,
où θ0 est la valeur de θ à l’initialisation (les angles des roues, généralementmesurés par des codeurs incrémentaux, étant alors choisis nuls). Cettecontrainte intégrable est donc en fait une contrainte holonôme.
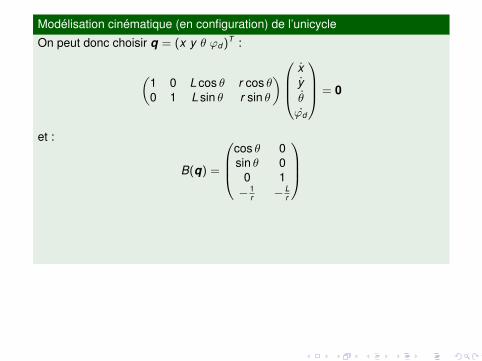
Modélisation cinématique (en configuration) de l’unicycleOn peut donc choisir q = (x y θ ϕd )
T :
�1 0 L cos θ r cos θ0 1 L sin θ r sin θ
�
xyθϕd
= 0
et :
B(q) =
cos θ 0sin θ 0
0 1− 1
r − Lr

Modélisation cinématique (en configuration) de l’unicycle
En remarquant, d’après ce qui précède, que :
x = v cos θy = v sin θ
θ = ω
ϕd = −vr− Lω
ron a :
Modèle cinématique (en configuration)
q = B(q)u,
avec pour vecteur de commande cinématique u = (v ω)T . La matrice B(q)représente donc le modèle cinématique (en configuration) du robot mobile.

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Modèles des robots mobiles (3)
Aspects pratiques
Rotation des roues pas toujours utile du point de vue pratique, étant donnéque l’on cherche essentiellement à contrôler la posture du robot.
Modèle cinématique de l’unicycle en pratique
ϕd n’apparaît pas dans les équations régissant la dérivée de la posture, d’oùle modèle simplifié :
x = v cos θy = v sin θ
θ = ω

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Modèles des robots mobiles (4)
Pour les robots mobiles de type tricycle on a q = (x y θ ψ)T et le modèlecinématique réduit, :
x = v cos θy = v sin θ
θ =vD
tanψ
ψ = η
où u = (v η)T est le vecteur de commande cinématique, η représentant lavitesse d’orientation imposée à la roue orientable.

Robotique mobile
Modélisation
Les grandes classes de robots mobiles et leurs modèles
Modèles des robots mobiles (4)
Pour les robots mobiles omnidirectionnels, on peut considérer qu’il estpossible de commander directement la posture et le modèle cinématique enposture est donc :
x = u1
y = u2
θ = u3
où u = (u1 u2 u3)T représente le vecteur de commande.
Robotique mobile
Modélisation
Représentation d’état et commandabilité
Plan
1 Introduction
2 ModélisationDéfinitionsRoulement sans glissement et contraintes non holonômesLes grandes classes de robots mobiles et leurs modèlesReprésentation d’état et commandabilité
3 PerceptionCapteurs en robotique mobileLocalisationConstruction de carte
4 NavigationProblématiques et approchesPlanification de cheminExecution du mouvement
Robotique mobile
Modélisation
Représentation d’état et commandabilité
Représentation d’état
Variable d’étatAvec q = variable d’état du système. On note x = q par habitude.
x = B(x)u,
où B(x) est de dimension n × m.
Propriétés
Représentation associée non linéaire, sans dérive.

Robotique mobile
Modélisation
Représentation d’état et commandabilité
Commandabilité (1)
Interprétation
Pour qu’un robot mobile soit utile, il faut en premier lieu s’assurer de sacommandabilité : existence d’une loi de commande u amenant le robot d’unétat initial à un état final quelconque.
Commandabilité du linéariséLinéarisé autour d’un point d’équilibre x0 quelconque :
x = B(x0)u,
avec B(x0) ∈ Rn×m. Pour les robots de type unicycle et voiture, la nonholonomie va de pair avec une forme de sous-actionnement (m < n).
Robotique mobile
Modélisation
Représentation d’état et commandabilité
Commandabilité (1)
Interprétation
Pour qu’un robot mobile soit utile, il faut en premier lieu s’assurer de sacommandabilité : existence d’une loi de commande u amenant le robot d’unétat initial à un état final quelconque.
Commandabilité du linéariséCondition de rang (critère de commandabilité de Kalman) :
Rang(B, AB, . . . ,An−1B) = n → Rang B(x0) = n
jamais remplie car m < n : le linéarisé n’est donc pas commandable.

Robotique mobile
Modélisation
Représentation d’état et commandabilité
Commandabilité (2)
Commandabilité d’un robot mobile (théorème de Chow)
On note toujours B(x) = (b1(x) b2(x) . . .bm(x)) la matrice du modèlecinématique, de dimension n × m.Un robot mobile est commandable si les colonnes de B(x) et leurs crochetsde Lie successifs forment un ensemble de n colonnes indépendantes.
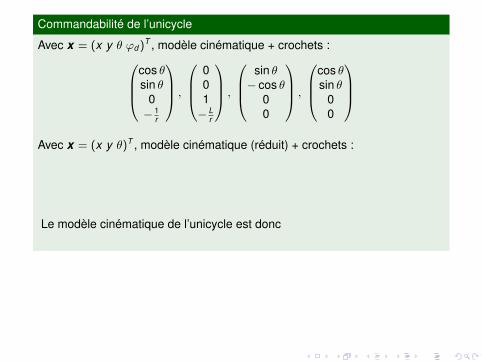
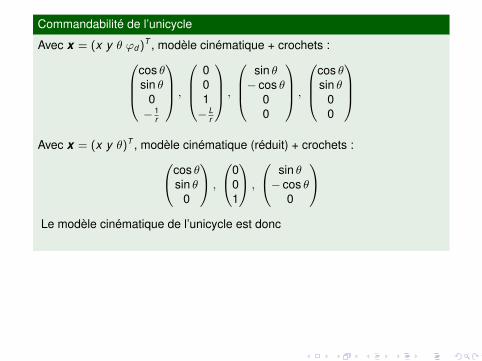
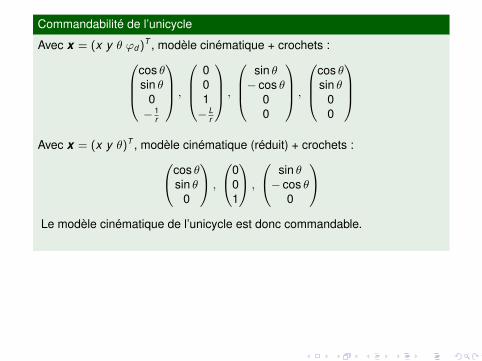
Commandabilité de l’unicycle
Avec x = (x y θ ϕd )T , modèle cinématique + crochets :
cos θsin θ
0− 1
r
,
001− L
r
,
sin θ− cos θ
00
,
cos θsin θ
00
Avec x = (x y θ)T , modèle cinématique (réduit) + crochets :
cos θsin θ
0
,
001
,
sin θ
− cos θ0
Le modèle cinématique de l’unicycle est donc
commandable.
Commandabilité de l’unicycle
Avec x = (x y θ ϕd )T , modèle cinématique + crochets :
cos θsin θ
0− 1
r
,
001− L
r
,
sin θ− cos θ
00
,
cos θsin θ
00
Avec x = (x y θ)T , modèle cinématique (réduit) + crochets :
cos θsin θ
0
,
001
,
sin θ
− cos θ0
Le modèle cinématique de l’unicycle est donc
commandable.
Commandabilité de l’unicycle
Avec x = (x y θ ϕd )T , modèle cinématique + crochets :
cos θsin θ
0− 1
r
,
001− L
r
,
sin θ− cos θ
00
,
cos θsin θ
00
Avec x = (x y θ)T , modèle cinématique (réduit) + crochets :
cos θsin θ
0
,
001
,
sin θ
− cos θ0
Le modèle cinématique de l’unicycle est donc
commandable.
Commandabilité de l’unicycle
Avec x = (x y θ ϕd )T , modèle cinématique + crochets :
cos θsin θ
0− 1
r
,
001− L
r
,
sin θ− cos θ
00
,
cos θsin θ
00
Avec x = (x y θ)T , modèle cinématique (réduit) + crochets :
cos θsin θ
0
,
001
,
sin θ
− cos θ0
Le modèle cinématique de l’unicycle est donc commandable.

Robotique mobile
Perception
Plan
1 Introduction
2 ModélisationDéfinitionsRoulement sans glissement et contraintes non holonômesLes grandes classes de robots mobiles et leurs modèlesReprésentation d’état et commandabilité
3 PerceptionCapteurs en robotique mobileLocalisationConstruction de carte
4 NavigationProblématiques et approchesPlanification de cheminExecution du mouvement

Robotique mobile
Perception
Perception : généralités
DéfinitionPerception en robotique = capacité du système à recueillir, traiter et mettreen forme des informations utiles au robot pour agir et réagir dans le mondequi l’entoure.
Particularités de la robotique mobile :environnement non structuréredondance d’information : nombreux capteurschoix des capteursutilisation des données

Robotique mobile
Perception
Capteurs en robotique mobile
Plan
1 Introduction
2 ModélisationDéfinitionsRoulement sans glissement et contraintes non holonômesLes grandes classes de robots mobiles et leurs modèlesReprésentation d’état et commandabilité
3 PerceptionCapteurs en robotique mobileLocalisationConstruction de carte
4 NavigationProblématiques et approchesPlanification de cheminExecution du mouvement
Robotique mobile
Perception
Capteurs en robotique mobile
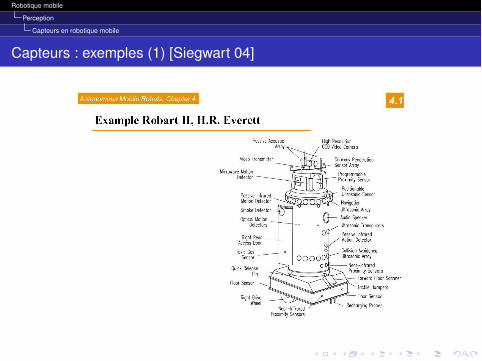
Capteurs : exemples (1) [Siegwart 04]
Robotique mobile
Perception
Capteurs en robotique mobile
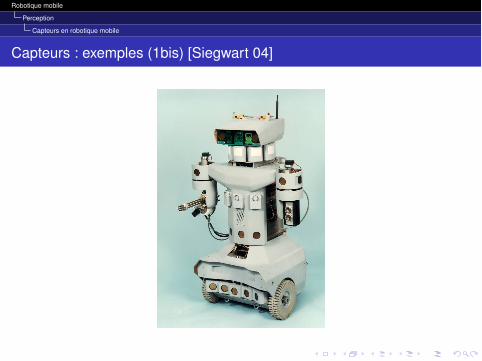
Capteurs : exemples (1bis) [Siegwart 04]

Robotique mobile
Perception
Capteurs en robotique mobile
Capteurs : exemples (2) [Siegwart 04]
Robotique mobile
Perception
Capteurs en robotique mobile
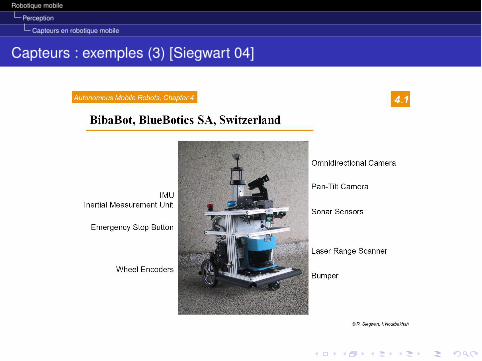
Capteurs : exemples (3) [Siegwart 04]

Robotique mobile
Perception
Capteurs en robotique mobile
Capteurs
Cadre de l’étudeEtude détaillée des capteurs =
physique + électronique + traitement du signal + . . ..
Dans ce cours : uniquement principe de fonctionnement des capteursembarqués pour la navigation d’un robot mobile.

Robotique mobile
Perception
Capteurs en robotique mobile
Classification des capteurs
Classification choisieCapteurs proprioceptifs : mesure de l’état du robot lui-même (position ouvitesse des roues, charge de la batterie, etc.).
Capteurs extéroceptifs : mesure de l’état de l’environnement (distancesrobot-environnement, température, contact, etc.).
Autre classification [Siegwart 04]Capteurs passifs : utilisent l’énergie de l’environnement ou du robot.
Capteurs actifs : utilisent leur propre énergie (donc perturbent l’environnement).
Robotique mobile
Perception
Capteurs en robotique mobile
Caractéristiques des capteurs
Principalement :étendue de mesurerésolutionlinéaritébande passante/fréquence d’acquisitionsensibilitéprécision (erreur systématique, aléatoire).

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de la rotation des roues
Moteur + capteur = servomoteur
Configuration habituelle : roue motrice + dispositif de mesure de rotation àl’aide d’un capteur disposé sur l’axe lui-même.
Capteurs proprioceptifs.
Propriétés :peu différents des capteurs habituels en commande d’axecodeurs absolus inutilesgrandeur de mesure = vitesse de rotationrarement mesure directe (génératrice tachymétrique)mesure indirecte par codeurs optiques (moindre coût, moindreencombrement, moindre entretien) : comptage d’impulsions (bruit dequantification aux basses vitesses)résolution fine ou synchrorésolveurs [Gangloff 04]

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de position et d’orientation (1)
Mesure de la position
Très peu de capteurs de position absolue d’un point dans un repère fixedonné : GPS.
Mesure de l’orientationDavantage de capteurs d’orientation d’un solide dans un repère fixe donné :gyromètre, compas, etc.
Mesures . . . d’extérieur !Mesures directes de l’orientation et de la position principalement en extérieur.

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de position et d’orientation (2)
Mesure de la position : le GPS
Global Positioning System (GPS) : applications militaires, actuellement à ladisposition du grand public.
Emissions synchronisées dans le temps perçues et recoupées au niveau durécepteur par triangulation.
Propriétés :précision brute de l’ordre de la quinzaine de mètresméthode différentielle à l’aide de deux récepteurs : précision de l’ordredu centimètrepositionnement en extérieurfaible précision, prix élevé : des systèmes multirobotsmesure à des fréquences de l’ordre de 5 Hz : pas temps-réel : recalagede la position

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de position et d’orientation (3)
Mesure de l’orientation : gyromètres
Gyromètres : capteurs proprioceptifs pour mesurer l’orientation du corps surlequel ils sont placés par rapport à un référentiel fixe, selon un ou deux axes.
Mécaniques, optiques, à structure vibrante, etc.
Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de position et d’orientation (3)
Mesure de l’orientation : gyromètres
Gyromètres : capteurs proprioceptifs pour mesurer l’orientation du corps surlequel ils sont placés par rapport à un référentiel fixe, selon un ou deux axes.
Mécaniques, optiques, à structure vibrante, etc.
Propriétés :gyromètres mécaniques et optiques : performances très supérieures àcelles requises en robotique mobile, coût élevé (aéronautique et spatial)structure vibrante : plus grand public :
Futaba GY240 : un axe pour le modélisme, 130 $US27 mm × 27 mm × 20 mm, 25 g.

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de position et d’orientation (4)
Mesure de l’orientation : compas et boussoles
Compas et boussoles : information d’orientation par rapport à une référencefixe (nord magnétique typiquement).
Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de position et d’orientation (4)
Mesure de l’orientation : compas et boussoles
Compas et boussoles : information d’orientation par rapport à une référencefixe (nord magnétique typiquement).
Propriétés :compas électroniques capables de détecter le nordCMP03 : résolution de 3 à 4o environ, 32 × 35 mm, 45$US.

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de proximité et de distance (1)
Télémétrie : définitionTélémétrie : toute technique de mesure de distance par des procédésacoustiques, optiques ou radioélectriques.
Capteur = télémètre :différentes techniques de mesure de distance (mesure du temps de vold’une onde, triangulation)différentes technologies.
Capteurs actifs et extéroceptifs.

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de proximité et de distance (2)
Capteurs infrarouges
Capteurs infrarouges : ensemble émetteur/récepteur utilisant des radiationsnon visibles.
Capteurs infrarouges Sharp GP2 de portée réduite :GP2D120 : 4 − 30 cm, GP2Y0A02YK : 20 − 150 cm
20 $US.

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de proximité et de distance (2)
Capteurs infrarouges
Capteurs infrarouges : ensemble émetteur/récepteur utilisant des radiationsnon visibles.
Propriétés :faible portée, mesure très dégradée au-delà de un mètre : détecteurs deproximité ou de présencesensibilité aux conditions extérieures (lumière ambiante, spécularité dessurfaces, température, pression)cône de détectionalternance émission/réception : distance minimale.

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de proximité et de distance (3)
Capteurs ultrasonores
Capteurs ultrasonores : utilisent des vibrations sonores non perceptibles pourl’oreille humaine (20 kHz à 200 kHz).
Télémètres ultrasonores Polaroïd et Migatron

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de proximité et de distance (3)
Capteurs ultrasonores
Capteurs ultrasonores : utilisent des vibrations sonores non perceptibles pourl’oreille humaine (20 kHz à 200 kHz).
Télémètre ultrasonore MSU08 (Lextronic) :L × l × h = 43 mm × 20 mm × 17 mm
moins de 60 $US.

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de proximité et de distance (3)
Capteurs ultrasonores
Capteurs ultrasonores : utilisent des vibrations sonores non perceptibles pourl’oreille humaine (20 kHz à 200 kHz).
Télémètres ultrasoniques Airmar AT 120

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de proximité et de distance (3)
Capteurs ultrasonores
Capteurs ultrasonores : utilisent des vibrations sonores non perceptibles pourl’oreille humaine (20 kHz à 200 kHz).
Propriétés :distance maximale et distance effective de mesure à adapter à la plagede mesuresensibilité à la densité de l’air (température, pression)cône de détectionalternance émission/réception : distance minimalefréquence maximale des mesures variable (mesures à 1, 5 m : toutes les10 ms, à 30 m toute les 200 ms).

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de proximité et de distance (4)
Télémètres laserTélémètres laser : mesure du temps de vol d’une impulsion émise par unediode laser faible puissance.
Balayage : direction de mesure modifiée par rotation d’un miroir.

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de proximité et de distance (4)
Télémètres laserTélémètres laser : mesure du temps de vol d’une impulsion émise par unediode laser faible puissance.
Balayage : direction de mesure modifiée par rotation d’un miroir.
Propriétés :bonne précision, télémètres les plus répandusbonne résolution angulaire (0, 25 − 0, 5 − 1o)distance maximale (conseillée) de mesure : 30 mbalayage sur 100 à 180 degrés.

Robotique mobile
Perception
Capteurs en robotique mobile
Mesure de proximité et de distance (4)
Télémètres laserTélémètres laser : mesure du temps de vol d’une impulsion émise par unediode laser faible puissance.
Balayage : direction de mesure modifiée par rotation d’un miroir.
Propriétés :bonne stabilité en températureplus encombrant : (L × l × h) : 156 × 155 × 210 mm, 4, 5 kgmesure complète (balayage) en quelques secondesprix élevé (environ 6000 $US pour un Sick).

Robotique mobile
Perception
Capteurs en robotique mobile
Vision par ordinateur
Vision et robotique mobile
Vision par ordinateur : vision traditionnelle, stéréovision.
Vision omnidirectionnelle : mesure de la réflexion de l’environnement sur unmiroir parabolique.
Dispositif,image brute et reprojection cylindrique [Pajdla 03]

Robotique mobile
Perception
Capteurs en robotique mobile
Vision par ordinateur
Vision et robotique mobile
Vision par ordinateur : vision traditionnelle, stéréovision.
Vision omnidirectionnelle : mesure de la réflexion de l’environnement sur unmiroir parabolique.
Image brute, reprojections cylindrique et perspective [Pajdla 03]

Robotique mobile
Perception
Capteurs en robotique mobile
Vision par ordinateur
Vision et robotique mobile
Vision par ordinateur : vision traditionnelle, stéréovision.
Vision omnidirectionnelle : mesure de la réflexion de l’environnement sur unmiroir parabolique.
Propriétés :vision panoramique de la scènedétection temps-réeldifficultés technologiques : alignement caméra-miroir, régularité dumiroir, géométrie de capteur rectangulaire à pas constanten développement.

Robotique mobile
Perception
Localisation
Plan
1 Introduction
2 ModélisationDéfinitionsRoulement sans glissement et contraintes non holonômesLes grandes classes de robots mobiles et leurs modèlesReprésentation d’état et commandabilité
3 PerceptionCapteurs en robotique mobileLocalisationConstruction de carte
4 NavigationProblématiques et approchesPlanification de cheminExecution du mouvement

Robotique mobile
Perception
Localisation
Localisation : généralités
Objet de la localisation
Nombreux défauts des capteurs et domaines d’application ciblés : tendanceà multiplier les capteurs.
Redondance d’information : nécessité d’une fusion cohérente d’ informationsde nature différente.
Nature des informationsPrincipalement :
posture absolue ou relativedistance aux corps présents dans l’environnement.

Robotique mobile
Perception
Localisation
Odométrie (1)
Principe de l’odométrieCalcul de la posture par intégration des vitesses :
x(t) =
� t
0x(τ)dτ,
y(t) =
� t
0y(τ)dτ,
θ(t) =
� t
0θ(τ)dτ.
En pratique : intégration discrète sur calculateur.
Remarque
Odométrie : posture relative du robot, la posture initiale devant être obtenuepar d’autres moyens.

Robotique mobile
Perception
Localisation
Odométrie (2)
Avantages :simplicitépas de capteur supplémentaire.
Inconvénients :sensibilité vis-à-vis des paramètres géométriques (diamètre des roueset longueur de l’entraxe)pour une localisation absolue l’initialisation nécessite un autre moyen delocalisation.

Robotique mobile
Perception
Localisation
Odométrie (3)
Nature des erreursErreurs systématiques : erreur sur le diamètre des roues par rapport à lavaleur nominale attendue, diamètres différents, erreurs sur la disposition desroues, résolution des codeurs.
Erreurs non systématiques : sol non plan ou irrégulier, glissements divers(dus à la nature du sol, à une accélération trop brutale, à un obstacle, undéfaut mécanique, etc.), contact au sol non ponctuel.
Défaut majeur
Effet cumulatif très gênant des erreurs systématiques.

Robotique mobile
Perception
Localisation
Odométrie (4)
Estimation des erreursEstimation de l’incertitude de l’odométrie par la matrice de covariance debruit associée à la posture du robot, très difficile à déterminer (mouvementsde translation et de rotation couplés).
Visualisation : ellipse pour l’incertitude en position et pour l’incertitude enorientation.
Minimisation des erreursPas possible de prendre en compte les erreurs non systématiques.
Identifier et minimiser les erreurs systématiques, avant de les prendre encompte.

Robotique mobile
Perception
Localisation
Télémétrie (1)
Nature des informationsGénéralement deux informations : angle de gisement (direction de mesure)et distance au corps ayant réfléchi l’onde émise.
Domaine d’application
Permet de positionner les objets présents dans la scène par rapport aurobot : adapté aux environnements d’intérieur, structurés, comportant desformes régulières et statiques comme des murs.
Robotique mobile
Perception
Localisation
Télémétrie (2)
Choix 2D ou 3D ?Modèle de données (données brutes ou segmentation).

Robotique mobile
Perception
Localisation
Télémétrie (2)
Choix 2D ou 3D ?En 2D : certains obstacles mal captés (pieds de table).

Robotique mobile
Perception
Localisation
Télémétrie (2)
Choix 2D ou 3D ?En 3D : coût prohibitif du télémètre sinon dispositif orientable.
Dispositif de mesures laser tridimensionnelles avec un laser à balayage surune platine
Robotique mobile
Perception
Localisation
Télémétrie (3)
Recalage
Connaissance a priori de l’environnement : possibilité de recalage desmesures sur le modèle :
soit on utilise directement le nuage de points de mesuresoit on extrait des primitives dans ce nuage, typiquement des segmentsreprésentant les surfaces planes et des coins, représentant l’intersectiondes segments.

Robotique mobile
Perception
Localisation
Télémétrie (3)
Recalage de données 3D reprojetées par l’algorithme ICP

Robotique mobile
Perception
Localisation
Télémétrie (3)
Recalage de données 3D reprojetées par l’algorithme ICP

Robotique mobile
Perception
Localisation
Télémétrie (3)
Recalage de données télémétriques laser sur un modèle d’environnement :modèle de l’environnement

Robotique mobile
Perception
Localisation
Télémétrie (3)
Recalage de données télémétriques laser sur un modèle d’environnement :segments dans la zone de mesure

Robotique mobile
Perception
Localisation
Télémétrie (3)
Recalage de données télémétriques laser sur un modèle d’environnement :mesures segmentées

Robotique mobile
Perception
Localisation
Télémétrie (3)
Recalage de données télémétriques laser sur un modèle d’environnement :localisation par appariement

Robotique mobile
Perception
Localisation
Localisation sur balises (1)
AmersPoints (balises, motifs, objets) localisés simultanément dansl’environnement : calcul de la posture du robot par télémétrie et puistriangulation.
Nature des informations robot-amerGénéralement distance robot-balise, éventuellement angles de gisement desbalises référencés par rapport à la base.

Robotique mobile
Perception
Localisation
Localisation sur balises (2)
O�x
x
yO�
θ
�y
d1
d2
B1
B2α1
α2ϕ
Triangulation à 2 balises, avec mesure des angles de gisement
Robotique mobile
Perception
Localisation
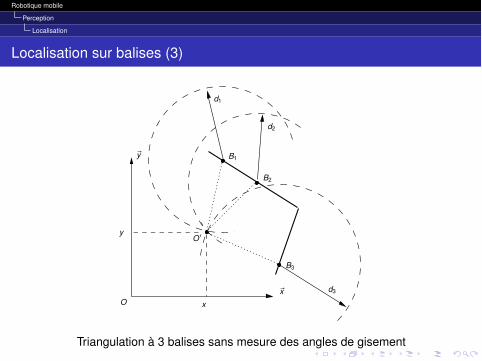
Localisation sur balises (3)
O�x
x
y
�y
d1
d2
B1
B2
B3
d3
O�
Triangulation à 3 balises sans mesure des angles de gisement

Robotique mobile
Perception
Localisation
Localisation multicapteur (1)
GénéralitésProcessus de localisation classique : combinaison des mesuresproprioceptives et extéroceptives :
posture relative donnée par l’odométrieposture du robot par rapport à l’environnement :
localisation d’amers (motifs, balises)localisation externe du robot par des capteurs présents dansl’environnement.
Fusion des donnéesBut : combiner les informations capteurs pour obtenir une représentationunique et cohérente de la configuration du robot.

Robotique mobile
Perception
Localisation
Localisation multicapteur (2)
Recalage simple
Mesure de la posture relative presque exclusivement par odométrie. . .
et
obtention de la posture absolue de référence par capteurs extéroceptifs lorsde l’initialisation ou ponctuellement pour annuler l’erreur accumulée parl’odométrie.

Robotique mobile
Perception
Localisation
Localisation multicapteur (2)
Recalage simple
Mesure de la posture relative presque exclusivement par odométrie. . .
et
obtention de la posture absolue de référence par capteurs extéroceptifs lorsde l’initialisation ou ponctuellement pour annuler l’erreur accumulée parl’odométrie.
Robotique mobile
Perception
Localisation
Localisation multicapteur (3)
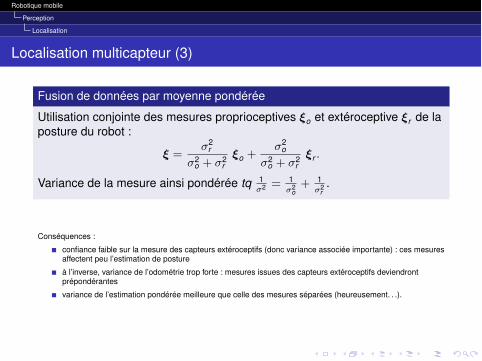
Fusion de données par moyenne pondérée
Utilisation conjointe des mesures proprioceptives ξo et extéroceptive ξr de laposture du robot :
ξ =σ2
r
σ2o + σ2
rξo +
σ2o
σ2o + σ2
rξr .
Variance de la mesure ainsi pondérée tq 1σ2 = 1
σ2o+ 1
σ2r.
Conséquences :
confiance faible sur la mesure des capteurs extéroceptifs (donc variance associée importante) : ces mesuresaffectent peu l’estimation de posture
à l’inverse, variance de l’odométrie trop forte : mesures issues des capteurs extéroceptifs deviendrontprépondérantes
variance de l’estimation pondérée meilleure que celle des mesures séparées (heureusement. . .).

Robotique mobile
Perception
Localisation
Localisation multicapteur (4)
Fusion de données par filtrage de Kalman
Problème de localisation à partir de différents capteurs = problèmed’estimation de l’état du système à partir d’observations : filtrage de Kalman.
Filtrage de Kalman Etendu (FKE)
Modèle d’état d’un robot mobile non linéaire : filtrage de Kalman étendu(FKE).

Robotique mobile
Perception
Localisation
Localisation multicapteur par FKE (1)
ModélisationModèle d’état d’un robot mobile non linéaire :
état x = configuration q (réduite)modèle d’évolution de l’état = modèle cinématiquevecteur de sortie y = ensemble des mesures effectuées (dimensiongénéralement supérieure à celle de l’état).
Représentation d’état discrète :�
x(k + 1) = f (x(k),u(k)) + G(k)w(k),y(k) = h(x(k)) + v(k).
Matrices de covariance des bruits w(k) et v(k) sont respectivement notéesQ(k) et R(k).

Robotique mobile
Perception
Localisation
Robot de type unicycle : modèle discret bruité
Etat : x(k) = (x(k) y(k) θ(k))T .
Modèle cinématique :
x(k + 1) =
x(k) + v(k)T cos θ(k)y(k) + v(k)T sin θ(k)
θ(k) + ω(k)T
+ G(k)w(k).
Equation de mesure : posture donnée par l’odométrie, et distance à un amersitué en (xb yb)
T :
y(k) =
�(x(k)− xb)2 + (y(k)− yb)2
x(k)y(k)θ(k)
+ v(k).
Robotique mobile
Perception
Localisation
Localisation multicapteur par FKE (2)
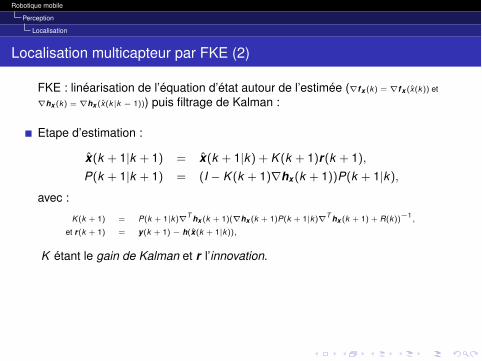
FKE : linéarisation de l’équation d’état autour de l’estimée (∇f x (k) = ∇f x (x(k)) et
∇hx (k) = ∇hx (x(k|k − 1))) puis filtrage de Kalman :
Initialisation : x(0|0) = x(0).

Robotique mobile
Perception
Localisation
Localisation multicapteur par FKE (2)
FKE : linéarisation de l’équation d’état autour de l’estimée (∇f x (k) = ∇f x (x(k)) et
∇hx (k) = ∇hx (x(k|k − 1))) puis filtrage de Kalman :
Etape de prédiction :
x(k + 1|k) = f (x(k |k),u(k)),P(k + 1|k) = ∇f x(k)P(k |k)∇T f x(k) + G(k)Q(k)GT (k).
Robotique mobile
Perception
Localisation
Localisation multicapteur par FKE (2)
FKE : linéarisation de l’équation d’état autour de l’estimée (∇f x (k) = ∇f x (x(k)) et
∇hx (k) = ∇hx (x(k|k − 1))) puis filtrage de Kalman :
Etape d’estimation :
x(k + 1|k + 1) = x(k + 1|k) + K (k + 1)r(k + 1),P(k + 1|k + 1) = (I − K (k + 1)∇hx(k + 1))P(k + 1|k),
avec :
K (k + 1) = P(k + 1|k)∇T hx (k + 1)(∇hx (k + 1)P(k + 1|k)∇T hx (k + 1) + R(k))−1,
et r(k + 1) = y(k + 1) − h(x(k + 1|k)),
K étant le gain de Kalman et r l’innovation.

Robotique mobile
Perception
Localisation
Robot de type unicycle : FKE
∇f x (k) =
1 0 −v(k)T sin θ(k)0 1 v(k)T cos θ(k)0 0 1
∇hx (k) =
(x(k|k−1)−xb )d(k|k−1)
(y(k|k−1)−yb )d(k|k−1)
0
1 0 00 1 00 0 1
en notant d(k|k − 1) =�
(x(k|k − 1) − xb)2 + (y(k|k − 1) − yb)2.
Alors :
x(k + 1|k) =
x(k) + v(k)T cos θ(k)y(k) + v(k)T sin θ(k)
θ(k) + ω(k)T
,
. . . . . . . . .

Robotique mobile
Perception
Construction de carte
Plan
1 Introduction
2 ModélisationDéfinitionsRoulement sans glissement et contraintes non holonômesLes grandes classes de robots mobiles et leurs modèlesReprésentation d’état et commandabilité
3 PerceptionCapteurs en robotique mobileLocalisationConstruction de carte
4 NavigationProblématiques et approchesPlanification de cheminExecution du mouvement

Robotique mobile
Perception
Construction de carte
Cartes de l’environnement : généralités
ProblèmeCartographie de l’environnement : problème dual de la localisation :représentation de l’environnement, en supposant connue la position du robot.
Types de cartes
Carte géométrique de l’environnement : positions dans une métrique donnée.
Carte topologique de l’environnement : associations entre les lieux del’environnement.

Robotique mobile
Perception
Construction de carte
Cartes géométriques
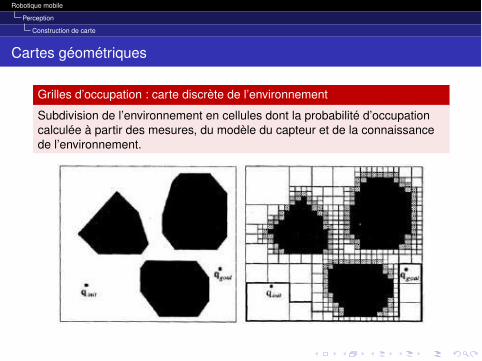
Grilles d’occupation : carte discrète de l’environnement
Subdivision de l’environnement en cellules dont la probabilité d’occupationcalculée à partir des mesures, du modèle du capteur et de la connaissancede l’environnement.
Robotique mobile
Perception
Construction de carte
Cartes géométriques
Grilles d’occupation : carte discrète de l’environnement
Subdivision de l’environnement en cellules dont la probabilité d’occupationcalculée à partir des mesures, du modèle du capteur et de la connaissancede l’environnement.

Robotique mobile
Perception
Construction de carte
Cartes topologiques
ContexteCas d’environnements de grande taille : construction d’une représentationpurement géométrique insuffisante et trop lourde à manipuler.
Informations topologiques : typiquement graphe discret représentantdifférentes zones et donc différentes cartes locales dans lesquelles évolue lerobot.
EvolutionDécision d’utiliser une nouvelle carte locale : configuration particulière del’environnement (passage, erreur de localisation importante dans la carteprécédente).
Boucles : remise à jour des différentes cartes locales.
Robotique mobile
Perception
Construction de carte
Localisation et cartographie simultanées (SLAM)
ProblèmeLocalisation et cartographie simultanées (SLAM) : naviguer à partir d’uneposition inconnue et dans un environnement inconnu en construisant enmême temps une représentation de l’environnement et de la posture durobot.
. . .

Robotique mobile
Navigation
Plan
1 Introduction
2 ModélisationDéfinitionsRoulement sans glissement et contraintes non holonômesLes grandes classes de robots mobiles et leurs modèlesReprésentation d’état et commandabilité
3 PerceptionCapteurs en robotique mobileLocalisationConstruction de carte
4 NavigationProblématiques et approchesPlanification de cheminExecution du mouvement

Robotique mobile
Navigation
Problématiques et approches
Plan
1 Introduction
2 ModélisationDéfinitionsRoulement sans glissement et contraintes non holonômesLes grandes classes de robots mobiles et leurs modèlesReprésentation d’état et commandabilité
3 PerceptionCapteurs en robotique mobileLocalisationConstruction de carte
4 NavigationProblématiques et approchesPlanification de cheminExecution du mouvement

Robotique mobile
Navigation
Problématiques et approches
Définitions
MouvementMouvement : application définie en fonction du temps t , reliant un point initialà l’instant t0 à un point final à l’instant tf .
Trajectoire
Trajectoire : support d’un mouvement, i. e.courbe paramétrée par unevariable s quelconque.
Mouvement sur la trajectoire
Evolution du paramètre s en fonction du temps t .
Robotique mobile
Navigation
Problématiques et approches
Problématique
Navigation
Navigation d’un robot mobile : recherche d’un mouvement dans l’espace desconfigurations sans collisions, d’une configuration initiale q0 = q(t0) à uneconfiguration finale qf = q(tf ).
Deux approches :
planification de trajectoire (ou de mouvement), exécution du mouvementcombinaison de primitives réactives (dont l’enchaînement est du ressortd’un planificateur de tâches).
Robotique mobile
Navigation
Problématiques et approches
Problématique
Navigation
Navigation d’un robot mobile : recherche d’un mouvement dans l’espace desconfigurations sans collisions, d’une configuration initiale q0 = q(t0) à uneconfiguration finale qf = q(tf ).
Deux approches :planification de trajectoire (ou de mouvement), exécution du mouvement
combinaison de primitives réactives (dont l’enchaînement est du ressortd’un planificateur de tâches).
Robotique mobile
Navigation
Problématiques et approches
Problématique
Navigation
Navigation d’un robot mobile : recherche d’un mouvement dans l’espace desconfigurations sans collisions, d’une configuration initiale q0 = q(t0) à uneconfiguration finale qf = q(tf ).
Deux approches :planification de trajectoire (ou de mouvement), exécution du mouvementcombinaison de primitives réactives (dont l’enchaînement est du ressortd’un planificateur de tâches).

Robotique mobile
Navigation
Problématiques et approches
Planification, exécution
Planification directe de mouvementMéthodes directes de planification d’un mouvement : pas de techniqueefficace (contraintes dynamiques et évitement d’obstacles).

Robotique mobile
Navigation
Problématiques et approches
Planification, exécution
Schéma classique
planification d’une trajectoire évitant les obstacles :
q : [0, 1] −→ Cfrees �→ q(s),
telle que q(0) = q0 et q(1) = qf
paramétrage en temps de cette trajectoire pour satisfaire les contraintes(limites des actionneurs notamment) : calcul du mouvement sur latrajectoireexécution du mouvement.
Robotique mobile
Navigation
Problématiques et approches
Planification, exécution
Variante
planification d’une trajectoire évitant les obstacles :
q : [0, 1] −→ Cfrees �→ q(s),
telle que q(0) = q0 et q(1) = qf
exécution du mouvement : suivi de la trajectoire de référence.

Robotique mobile
Navigation
Planification de chemin
Plan
1 Introduction
2 ModélisationDéfinitionsRoulement sans glissement et contraintes non holonômesLes grandes classes de robots mobiles et leurs modèlesReprésentation d’état et commandabilité
3 PerceptionCapteurs en robotique mobileLocalisationConstruction de carte
4 NavigationProblématiques et approchesPlanification de cheminExecution du mouvement

Robotique mobile
Navigation
Planification de chemin
Généralités
Problème touchant de nombreux domainesHistoriquement : nombreux développements en robotique mobile (faiblesdimensions, problèmes analytiques).
Aujourd’hui : algorithmes performants + vitesse des calculateurs : nombre deproblèmes solvables bien plus grand, notamment très nombreux degrés deliberté (logistique, animation, bioinformatique, robotique avancée).
Planification = matière en soit, à la rencontre entre mécanique etalgorithmique.

Robotique mobile
Navigation
Planification de chemin
Espace des configurations
Espace des configurations d’un point et d’un solide
Espace des configurations = ensemble des configurations accessibles (sanscollision) :
robot ponctuel : espace librerobot de taille et de forme quelconque : on peut se ramener au problèmede planification d’un robot ponctuel.

Robotique mobile
Navigation
Planification de chemin
Espace des configurations
Espace des configurations d’un point et d’un solide
Espace des configurations = ensemble des configurations accessibles (sanscollision) :
robot ponctuel : espace librerobot de taille et de forme quelconque : on peut se ramener au problèmede planification d’un robot ponctuel.

Robotique mobile
Navigation
Planification de chemin
Espace des configurations
Espace des configurations d’un point et d’un solide
Espace des configurations = ensemble des configurations accessibles (sanscollision) :
robot ponctuel : espace librerobot de taille et de forme quelconque : on peut se ramener au problèmede planification d’un robot ponctuel.

Robotique mobile
Navigation
Planification de chemin
Décomposition en cellules (1)
départ, but et obstacles (pour un robot point)

Robotique mobile
Navigation
Planification de chemin
Décomposition en cellules (1)
représentation discrète de Cfree

Robotique mobile
Navigation
Planification de chemin
Décomposition en cellules (1)
création d’un graphe reliant les différentes composantes adjacentes del’environnement

Robotique mobile
Navigation
Planification de chemin
Décomposition en cellules (1)
identification des cellules départ et butrecherche d’une solution dans le graphechemin sans collisions entre cellules.
Robotique mobile
Navigation
Planification de chemin
Décomposition en cellules (1)
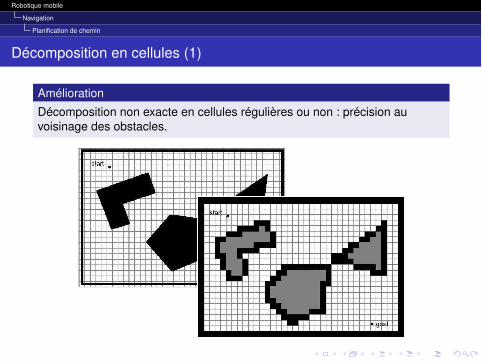
AméliorationDécomposition non exacte en cellules régulières ou non : précision auvoisinage des obstacles.

Robotique mobile
Navigation
Planification de chemin
Décomposition en cellules (1)
AméliorationDécomposition non exacte en cellules régulières ou non : précision auvoisinage des obstacles.
Robotique mobile
Navigation
Planification de chemin
Méthode du potentiel (1)
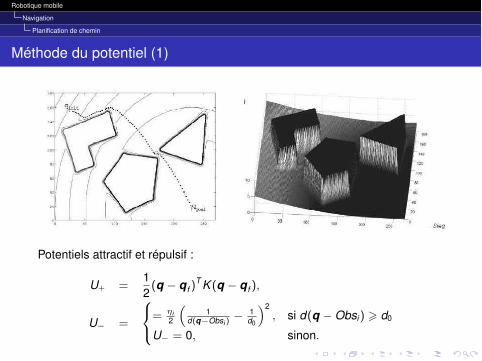
Potentiels attractif et répulsif :
U+ =12(q − qf )
T K (q − qf ),
U− =
= ηi
2
�1
d(q−Obsi )− 1
d0
�2, si d(q − Obsi) � d0
U− = 0, sinon.

Robotique mobile
Navigation
Planification de chemin
Méthode du potentiel (2)
Diffère sensiblement des autre méthodes évoquées dans cette section(raisonnement pas purement géométrique) :
simple et compatible temps-réelméthode non complètepotentiel total = potentiel attractif + potentiels répulsifs : minima locaux
qf
−∇U−
−∇U+
tactique de dégagement, fonctions de navigation

Robotique mobile
Navigation
Planification de chemin
Roadmaps (1)
Diagramme de Voronoï
Diagramme de Voronoï : lignes d’égale distance aux obstacles dans unenvironnement polygonal plan (navigation au plus loin des obstacles).

Robotique mobile
Navigation
Planification de chemin
Roadmaps (2)
Graphes de visibilité
Graphe de visibilité : graphe capturant la topologie de l’environnement àpartir des sommets d’obstacles polygonaux.
relier départ et arrivée aux sommets visibles des obstacles

Robotique mobile
Navigation
Planification de chemin
Roadmaps (2)
Graphes de visibilité
Graphe de visibilité : graphe capturant la topologie de l’environnement àpartir des sommets d’obstacles polygonaux.
reproduire avec les nouveaux nœuds

Robotique mobile
Navigation
Planification de chemin
Roadmaps (2)
Graphes de visibilité
Graphe de visibilité : graphe capturant la topologie de l’environnement àpartir des sommets d’obstacles polygonaux.
recherche d’un chemin dans le graphe.

Robotique mobile
Navigation
Planification de chemin
Roadmaps (3)
Méthodes d’échantillonnage aléatoire
Planificateurs complets trop lents, planificateurs heuristiques trop peufiables : méthodes d’échantillonnage aléatoire = planificateurs complets entemps infini.
Utilisation de la puissance de calcul et construction préalable d’un graphe del’environnement : grande rapidité.

Robotique mobile
Navigation
Planification de chemin
Roadmaps (4)
Algorithme PRM
Méthode initiale : probabilistic roadmap (PRM)Les nœuds du graphe ne sont pas choisis selon la géométrie del’environnement et des obstacles, mais par un tirage aléatoire dans Cfree.

Robotique mobile
Navigation
Planification de chemin
Roadmaps (4)
Algorithme PRM
Méthode initiale : probabilistic roadmap (PRM)Les nœuds du graphe ne sont pas choisis selon la géométrie del’environnement et des obstacles, mais par un tirage aléatoire dans Cfree.

Robotique mobile
Navigation
Planification de chemin
Roadmaps (4)
Algorithme PRM
Méthode initiale : probabilistic roadmap (PRM)Les nœuds du graphe ne sont pas choisis selon la géométrie del’environnement et des obstacles, mais par un tirage aléatoire dans Cfree.

Robotique mobile
Navigation
Planification de chemin
Roadmaps (5)
Algorithme PRM+ visibilité
Ajout au graphe uniquement des points reliant deux configurations nonvisibles l’une par rapport à l’autre précédemment.

Robotique mobile
Navigation
Planification de chemin
Cas des systèmes non holonômes
ProblèmePlanification de trajectoire = problème géométrique.Contraintes non holonômes = problème cinématique.
Problème difficile combinant planification et commande.
Première possibilité :planification de trajectoire sans tenir compte des contraintescinématiquesmoyennant l’existence de lois de commande locales relier lesconfigurations de cette trajectoire pour calculer une trajectoireadmissibleoptimisation : lissage de la trajectoire
Alternative : planification avec intégration de contrainte [LaValle 04].

Robotique mobile
Navigation
Execution du mouvement
Plan
1 Introduction
2 ModélisationDéfinitionsRoulement sans glissement et contraintes non holonômesLes grandes classes de robots mobiles et leurs modèlesReprésentation d’état et commandabilité
3 PerceptionCapteurs en robotique mobileLocalisationConstruction de carte
4 NavigationProblématiques et approchesPlanification de cheminExecution du mouvement

Robotique mobile
Navigation
Execution du mouvement
Les différents problèmes de commande
DéfinitionsDeux tâches :
suivi de chemin : calcul de la commande permettant d’asservir ladistance d’un point du robot à une trajectoire de référence, la vitesse dedéplacement longitudinale étant donnéela stabilisation de mouvement : calcul de la commande du systèmepermettant de stabiliser asymptotiquement à zéro l’erreur de suivi parrapport à un robot de référence.
Hypothèses
Problèmes de commande par retour d’état.
Etude de l’unicycle exclusivement.

Robotique mobile
Navigation
Execution du mouvement
Paramétrage
�x �
�y �θe
O�x
�xr
�yr
Or
θr
O�
�y
Pb
a

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (1)
Problématique
Trouver ω pour asservir d(P, C) avec v donnée.
�x �
�y �θe
O�x
P db
aO�
C
θr
Or
�xr
�yr
�y
Rr mobile sur C : repère de Frénet associé à
l’abscisse curviligne s.

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (2)
Existence et unicité de Or
P toujours à une distance de C inférieure à son rayon de courbure ρ(s) enOr , i. e. |d | < |ρ(s)|, ∀s ∈ [0 1] ou :
|dc(s)| < 1, ∀s ∈ [0 1]
avec c(s) courbure de C en Or .
Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (3)
Modélisation dans le repère de Frénet
Modélisation = mouvements de P et R� dans Rr et celui de Rr sur C,complètement caractérisés par la donnée de s, d et θe.

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (4)
Modélisation dans le repère de Frénet
Calcul de θe.
Courbure c(s) de C en Or :
c(s) = dθr
ds
et donc :
θe = θ − θr ,
= θ − dθr
dsdsdt
,
soit :θe = ω − sc(s).

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (4)
Modélisation dans le repère de Frénet
Calcul de θe.
Courbure c(s) de C en Or :
c(s) = dθr
dset donc :
θe = θ − θr ,
= θ − dθr
dsdsdt
,
soit :θe = ω − sc(s).

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (4)
Modélisation dans le repère de Frénet
Calcul de θe.
Courbure c(s) de C en Or :
c(s) = dθr
dset donc :
θe = θ − θr ,
= θ − dθr
dsdsdt
,
soit :θe = ω − sc(s).

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (4)
Modélisation dans le repère de Frénet
Calcul de θe.
Courbure c(s) de C en Or :
c(s) = dθr
dset donc :
θe = θ − θr ,
= θ − dθr
dsdsdt
,
soit :θe = ω − sc(s).
Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (4)
Modélisation dans le repère de Frénet
Calcul de θe.
Courbure c(s) de C en Or :
c(s) = dθr
dset donc :
θe = θ − θr ,
= θ − dθr
dsdsdt
,
soit :θe = ω − sc(s).
Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (5)
Modélisation dans le repère de Frénet
Calcul de s et d .
Vitesse du point P :
�vP = �vO� + �ω ∧−→O�P,
= v�x � + ω�z ∧ (a�x � + b�y �),
= (v − bω)(cos θe�xr + sin θe�yr ) + aω(− sin θe�xr + cos θe�yr ),
soit :�vP = ((v − bω) cos θe − aω sin θe)�xr + ((v − bω) sin θe + aω cos θe)�yr .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (5)
Modélisation dans le repère de Frénet
Calcul de s et d .
Vitesse du point P :
�vP = �vO� + �ω ∧−→O�P,
= v�x � + ω�z ∧ (a�x � + b�y �),
= (v − bω)(cos θe�xr + sin θe�yr ) + aω(− sin θe�xr + cos θe�yr ),
soit :�vP = ((v − bω) cos θe − aω sin θe)�xr + ((v − bω) sin θe + aω cos θe)�yr .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (5)
Modélisation dans le repère de Frénet
Calcul de s et d .
Vitesse du point P :
�vP = �vO� + �ω ∧−→O�P,
= v�x � + ω�z ∧ (a�x � + b�y �),
= (v − bω)(cos θe�xr + sin θe�yr ) + aω(− sin θe�xr + cos θe�yr ),
soit :�vP = ((v − bω) cos θe − aω sin θe)�xr + ((v − bω) sin θe + aω cos θe)�yr .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (5)
Modélisation dans le repère de Frénet
Calcul de s et d .
Vitesse du point P :
�vP = �vO� + �ω ∧−→O�P,
= v�x � + ω�z ∧ (a�x � + b�y �),
= (v − bω)(cos θe�xr + sin θe�yr ) + aω(− sin θe�xr + cos θe�yr ),
soit :�vP = ((v − bω) cos θe − aω sin θe)�xr + ((v − bω) sin θe + aω cos θe)�yr .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (5)
Modélisation dans le repère de Frénet
Calcul de s et d .
Vitesse du point P :
�vP = �vO� + �ω ∧−→O�P,
= v�x � + ω�z ∧ (a�x � + b�y �),
= (v − bω)(cos θe�xr + sin θe�yr ) + aω(− sin θe�xr + cos θe�yr ),
soit :�vP = ((v − bω) cos θe − aω sin θe)�xr + ((v − bω) sin θe + aω cos θe)�yr .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (5)
Modélisation dans le repère de Frénet
Calcul de s et d .
Vitesse du point P :
�vP = �vO� + �ω ∧−→O�P,
= v�x � + ω�z ∧ (a�x � + b�y �),
= (v − bω)(cos θe�xr + sin θe�yr ) + aω(− sin θe�xr + cos θe�yr ),
soit :�vP = ((v − bω) cos θe − aω sin θe)�xr + ((v − bω) sin θe + aω cos θe)�yr .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (6)
Modélisation dans le repère de Frénet
Calcul de s et d .
ou :
�vP =ddt
�−→OP
�,
=ddt
�−→
OOr +−→Or P
�,
= s�xr +ddt
�d�yr
�,
= s�xr + d�yr − d θr�xr ,
soit :�vP = s (1 − dc(s))�xr + d�yr .
Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (6)
Modélisation dans le repère de Frénet
Calcul de s et d .
ou :
�vP =ddt
�−→OP
�,
=ddt
�−→
OOr +−→Or P
�,
= s�xr +ddt
�d�yr
�,
= s�xr + d�yr − d θr�xr ,
soit :�vP = s (1 − dc(s))�xr + d�yr .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (6)
Modélisation dans le repère de Frénet
Calcul de s et d .
ou :
�vP =ddt
�−→OP
�,
=ddt
�−→
OOr +−→Or P
�,
= s�xr +ddt
�d�yr
�,
= s�xr + d�yr − d θr�xr ,
soit :�vP = s (1 − dc(s))�xr + d�yr .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (6)
Modélisation dans le repère de Frénet
Calcul de s et d .
ou :
�vP =ddt
�−→OP
�,
=ddt
�−→
OOr +−→Or P
�,
= s�xr +ddt
�d�yr
�,
= s�xr + d�yr − d θr�xr ,
soit :�vP = s (1 − dc(s))�xr + d�yr .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (6)
Modélisation dans le repère de Frénet
Calcul de s et d .
ou :
�vP =ddt
�−→OP
�,
=ddt
�−→
OOr +−→Or P
�,
= s�xr +ddt
�d�yr
�,
= s�xr + d�yr − d θr�xr ,
soit :�vP = s (1 − dc(s))�xr + d�yr .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (6)
Modélisation dans le repère de Frénet
Calcul de s et d .
ou :
�vP =ddt
�−→OP
�,
=ddt
�−→
OOr +−→Or P
�,
= s�xr +ddt
�d�yr
�,
= s�xr + d�yr − d θr�xr ,
soit :�vP = s (1 − dc(s))�xr + d�yr .
Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (7)
Modélisation dans le repère de Frénet
Calcul de s et d .
On récapitule :�vP = ((v − bω) cos θe − aω sin θe)�xr + ((v − bω) sin θe + aω cos θe)�yr ,
�vP = s (1 − dc(s))�xr + d�yr ,
soit :
s =(v − bω) cos θe − aω sin θe
1 − dc(s),
d = (v − bω) sin θe + aω cos θe,
θe = ω − sc(s).
Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (7)
Modélisation dans le repère de Frénet
Calcul de s et d .
On récapitule :�vP = ((v − bω) cos θe − aω sin θe)�xr + ((v − bω) sin θe + aω cos θe)�yr ,
�vP = s (1 − dc(s))�xr + d�yr ,
soit :
s =(v − bω) cos θe − aω sin θe
1 − dc(s),
d = (v − bω) sin θe + aω cos θe,
θe = ω − sc(s).

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (7)
Modélisation dans le repère de Frénet
Calcul de s et d .
On récapitule :�vP = ((v − bω) cos θe − aω sin θe)�xr + ((v − bω) sin θe + aω cos θe)�yr ,
�vP = s (1 − dc(s))�xr + d�yr ,
soit :
s =(v − bω) cos θe − aω sin θe
1 − dc(s),
d = (v − bω) sin θe + aω cos θe,
θe = ω − sc(s).

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (7)
Modélisation dans le repère de Frénet
Calcul de s et d .
On récapitule :�vP = ((v − bω) cos θe − aω sin θe)�xr + ((v − bω) sin θe + aω cos θe)�yr ,
�vP = s (1 − dc(s))�xr + d�yr ,
soit :
s =(v − bω) cos θe − aω sin θe
1 − dc(s),
d = (v − bω) sin θe + aω cos θe,
θe = ω − sc(s).

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (7)
Modélisation dans le repère de Frénet
Calcul de s et d .
On récapitule :�vP = ((v − bω) cos θe − aω sin θe)�xr + ((v − bω) sin θe + aω cos θe)�yr ,
�vP = s (1 − dc(s))�xr + d�yr ,
soit :
s =(v − bω) cos θe − aω sin θe
1 − dc(s),
d = (v − bω) sin θe + aω cos θe,
θe = ω − sc(s).

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (8)
Suivi de chemin sans contrôle d’orientationOn recherche une loi ω permettant de stabiliser la distance à la courbe deréférence sans contrôle particulier de l’orientation.
Hypothèse : b = 0 (point P sur l’axe).
Alors :d = v sin θe + aω cos θe.
La loi :ω = − v sin θe
a cos θe− v
cos θek(d , θe)d ,
avec k(d , θe) � 0 tel que k(d , ±π2 ) = 0 donne :
d = −vak(d , θe)d .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (8)
Suivi de chemin sans contrôle d’orientationOn recherche une loi ω permettant de stabiliser la distance à la courbe deréférence sans contrôle particulier de l’orientation.
Conséquences
d = −vak(d , θe)d .
a, v et k(d , θe) > 0 : |d | décroissante le long de toute trajectoire.
v de signe constant et suffisamment régulière : d tend asymptotiquementvers 0.

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (9)
Suivi de chemin avec contrôle d’orientation. . .stabiliser la distance à la trajectoire et l’erreur en orientation.
Hypothèse : a = b = 0.
Si on pose x1 = s, et u1 = s alors x1 = u1 :
u1 =v cos θe
1 − dc(s)
on pose : x2 = d , x3 = (1 − dc(s)) tan θe et u2 = x3 d’où :
Nouvelle représentation
x1 = u1,
x2 = u1x3,
x3 = u2.
Retour d’état ω à v donné reformulé :retour d’état u2, avec u1 déduit de v .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (9)
Suivi de chemin avec contrôle d’orientation. . .stabiliser la distance à la trajectoire et l’erreur en orientation.
Hypothèse : a = b = 0. Si on pose x1 = s, et u1 = s alors x1 = u1 :
u1 =v cos θe
1 − dc(s)
on pose : x2 = d , x3 = (1 − dc(s)) tan θe et u2 = x3 d’où :
Nouvelle représentation
x1 = u1,
x2 = u1x3,
x3 = u2.
Retour d’état ω à v donné reformulé :retour d’état u2, avec u1 déduit de v .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (9)
Suivi de chemin avec contrôle d’orientation. . .stabiliser la distance à la trajectoire et l’erreur en orientation.
Hypothèse : a = b = 0. Si on pose x1 = s, et u1 = s alors x1 = u1 :
u1 =v cos θe
1 − dc(s)
on pose : x2 = d , x3 = (1 − dc(s)) tan θe et u2 = x3 d’où :
Nouvelle représentation
x1 = u1,
x2 = u1x3,
x3 = u2.
Retour d’état ω à v donné reformulé :retour d’état u2, avec u1 déduit de v .

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (9)
Suivi de chemin avec contrôle d’orientation. . .stabiliser la distance à la trajectoire et l’erreur en orientation.
Hypothèse : a = b = 0. Si on pose x1 = s, et u1 = s alors x1 = u1 :
u1 =v cos θe
1 − dc(s)
on pose : x2 = d , x3 = (1 − dc(s)) tan θe et u2 = x3 d’où :
Nouvelle représentation
x1 = u1,
x2 = u1x3,
x3 = u2.
Retour d’état ω à v donné reformulé :retour d’état u2, avec u1 déduit de v .
Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (9)
Suivi de chemin avec contrôle d’orientation. . .stabiliser la distance à la trajectoire et l’erreur en orientation.
Hypothèse : a = b = 0. Si on pose x1 = s, et u1 = s alors x1 = u1 :
u1 =v cos θe
1 − dc(s)
on pose : x2 = d , x3 = (1 − dc(s)) tan θe et u2 = x3 d’où :
Nouvelle représentation
x1 = u1,
x2 = u1x3,
x3 = u2.
Retour d’état ω à v donné reformulé :retour d’état u2, avec u1 déduit de v .
Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (9)
Système chaîné
x1 = u1, x2 = u1x3, et x3 = u2.
Retour d’état proportionnel :
u2 = x3 = −u1k2x2 − |u1|k3x3
avec k2 et k3 deux constantes strictement positives, alors :
x3 + |u1|k3x3 + u21k2x3 = 0,
si u1 constant quelconque.
ConclusionSystème stable en x2 = x3 = 0 et donc en d = 0 et θe = 0.

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (9)
Système chaîné
x1 = u1, x2 = u1x3, et x3 = u2.
Retour d’état proportionnel :
u2 = x3 = −u1k2x2 − |u1|k3x3
avec k2 et k3 deux constantes strictement positives, alors :
x3 + |u1|k3x3 + u21k2x3 = 0,
si u1 constant quelconque.
ConclusionSystème stable en x2 = x3 = 0 et donc en d = 0 et θe = 0.

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (9)
Système chaîné
x1 = u1, x2 = u1x3, et x3 = u2.
Retour d’état proportionnel :
u2 = x3 = −u1k2x2 − |u1|k3x3
avec k2 et k3 deux constantes strictement positives, alors :
x3 + |u1|k3x3 + u21k2x3 = 0,
si u1 constant quelconque.
ConclusionSystème stable en x2 = x3 = 0 et donc en d = 0 et θe = 0.

Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (9)
Système chaîné
x1 = u1, x2 = u1x3, et x3 = u2.
Retour d’état proportionnel :
u2 = x3 = −u1k2x2 − |u1|k3x3
avec k2 et k3 deux constantes strictement positives, alors :
x3 + |u1|k3x3 + u21k2x3 = 0,
si u1 constant quelconque.
ConclusionSystème stable en x2 = x3 = 0 et donc en d = 0 et θe = 0.
Robotique mobile
Navigation
Execution du mouvement
Suivi de chemin (10)
On peut montrer que pour u1 quelconque et :
x22 (0) +
x23 (0)k2
<1
c2max
où cmax est la courbure maximale le long de C, la condition sur la distance|− dc(s)| < 1 est vérifiée et la fonction :
V (x) = 12
�x2
2 +x2
3
k2
�
tend vers zéro si u1 est suffisamment régulière (bornée, dérivable et dedérivée bornée et ne tendant pas vers zéro lorsque t tend vers l’infini).

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (1)
Problématique
Asservir la posture d’un robot mobile par rapport à un robot virtuel deréférence.
�x �
�y �
robotréférence
Pb
a
θe
O�x
�xr
�yr
OrO�
θr
�y
Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (2)
Mouvement de référenceRepère de référence pas nécessairement arbitraire :
mouvement de référence admissible : x r = B(x r )ur
mouvement de référence non admissible.
Formulation du problème
Soit un mouvement admissible x r (t) sur [0, T ] tel que x r = B(x r )ur .
Problème de stabilisation : trouver u(x , x r , t) tq l’origine du systèmed’erreur :
xe = B(x)u − B(x r )ur
soit asymptotiquement stable.
Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (3)
Mouvements admissibles sans contrôle d’orientationTrouver (v , ω) pour stabiliser l’erreur entre position courante et position deréférence, sans contrainte sur l’orientation.
Hypothèse : on considère P tq a �= 0 et b = 0.Alors :
pe = �vP/R − pr
=
�cos θ − sin θsin θ cos θ
��v − bω
aω
�− pr .
avec pr la position de Or et pe l’erreur de position dans R.

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (3)
Mouvements admissibles sans contrôle d’orientationTrouver (v , ω) pour stabiliser l’erreur entre position courante et position deréférence, sans contrainte sur l’orientation.
Hypothèse : on considère P tq a �= 0 et b = 0.
Alors :
pe = �vP/R − pr
=
�cos θ − sin θsin θ cos θ
��v − bω
aω
�− pr .
avec pr la position de Or et pe l’erreur de position dans R.

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (3)
Mouvements admissibles sans contrôle d’orientationTrouver (v , ω) pour stabiliser l’erreur entre position courante et position deréférence, sans contrainte sur l’orientation.
Hypothèse : on considère P tq a �= 0 et b = 0.Alors :
pe = �vP/R − pr
=
�cos θ − sin θsin θ cos θ
��v − bω
aω
�− pr .
avec pr la position de Or et pe l’erreur de position dans R.

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (4)
Avec (inversible car a �= 0) :
u =
�u1
u2
�=
�cos θ − sin θsin θ cos θ
��1 −b0 a
��vω
�
on a :pe = u − pr .
Stabiliser par retour d’état :
u = pr − K pe,
avec K diagonale positive.
Remarque
Dans ce qui précède c’est le point P qui est asservi à la position de Or et ilpersiste une erreur constante de a (or a �= 0 impérativement).

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (4)
Avec (inversible car a �= 0) :
u =
�u1
u2
�=
�cos θ − sin θsin θ cos θ
��1 −b0 a
��vω
�
on a :pe = u − pr .
Stabiliser par retour d’état :
u = pr − K pe,
avec K diagonale positive.
Remarque
Dans ce qui précède c’est le point P qui est asservi à la position de Or et ilpersiste une erreur constante de a (or a �= 0 impérativement).
Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (4)
Avec (inversible car a �= 0) :
u =
�u1
u2
�=
�cos θ − sin θsin θ cos θ
��1 −b0 a
��vω
�
on a :pe = u − pr .
Stabiliser par retour d’état :
u = pr − K pe,
avec K diagonale positive.
Remarque
Dans ce qui précède c’est le point P qui est asservi à la position de Or et ilpersiste une erreur constante de a (or a �= 0 impérativement).

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (4)
Avec (inversible car a �= 0) :
u =
�u1
u2
�=
�cos θ − sin θsin θ cos θ
��1 −b0 a
��vω
�
on a :pe = u − pr .
Stabiliser par retour d’état :
u = pr − K pe,
avec K diagonale positive.
Remarque
Dans ce qui précède c’est le point P qui est asservi à la position de Or et ilpersiste une erreur constante de a (or a �= 0 impérativement).

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (5)
Mouvements admissibles avec contrôle d’orientationTrouver (v , ω) pour stabiliser l’erreur ξe entre posture courante et posture deréférence.
Dans Rr :
ξe =
xe
ye
θe
=
cos θr sin θr 0− sin θr cos θr 0
0 0 1
x − xr
x − yr
θ − θr
.
Alors :
xe
ye
θe
=
cos θe
sin θe
0
v +
001
ω −
100
vr −
−ye
xe
1
ωr .

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (5)
Mouvements admissibles avec contrôle d’orientationTrouver (v , ω) pour stabiliser l’erreur ξe entre posture courante et posture deréférence.
Dans Rr :
ξe =
xe
ye
θe
=
cos θr sin θr 0− sin θr cos θr 0
0 0 1
x − xr
x − yr
θ − θr
.
Alors :
xe
ye
θe
=
cos θe
sin θe
0
v +
001
ω −
100
vr −
−ye
xe
1
ωr .

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (5)
Mouvements admissibles avec contrôle d’orientationTrouver (v , ω) pour stabiliser l’erreur ξe entre posture courante et posture deréférence.
Dans Rr :
ξe =
xe
ye
θe
=
cos θr sin θr 0− sin θr cos θr 0
0 0 1
x − xr
x − yr
θ − θr
.
Alors :
xe
ye
θe
=
cos θe
sin θe
0
v +
001
ω −
100
vr −
−ye
xe
1
ωr .

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (6)
Mouvements admissibles avec contrôle d’orientationTrouver (v , ω) pour stabiliser l’erreur ξe entre posture courante et posture deréférence.
Avec : x1 = xe, x2 = ye, x3 = tan θe, u1 = v cos θe − vr et u2 = ω−ωrcos2 θe
, définipartout sauf en θe = ±π
2 :
x1 = u1 + ωr x2,
x2 = u1x3 − ωr x1 + vr x3,
x3 = u2.
Alors :
u1 = −k1|vr |(x1 + x2x3),
u2 = −k2vr x2 − k3|vr |x3,
avec k1, k2 et k3 > 0 rend le système asymptotiquement stable si vr estsuffisamment régulière (bornée, dérivable et de dérivée bornée et ne tendantpas vers zéro lorsque t tend vers l’infini).
Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (6)
Mouvements admissibles avec contrôle d’orientationTrouver (v , ω) pour stabiliser l’erreur ξe entre posture courante et posture deréférence.
Avec : x1 = xe, x2 = ye, x3 = tan θe, u1 = v cos θe − vr et u2 = ω−ωrcos2 θe
, définipartout sauf en θe = ±π
2 :
x1 = u1 + ωr x2,
x2 = u1x3 − ωr x1 + vr x3,
x3 = u2.
Alors :
u1 = −k1|vr |(x1 + x2x3),
u2 = −k2vr x2 − k3|vr |x3,
avec k1, k2 et k3 > 0 rend le système asymptotiquement stable si vr estsuffisamment régulière (bornée, dérivable et de dérivée bornée et ne tendantpas vers zéro lorsque t tend vers l’infini).

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (6)
Mouvements admissibles avec contrôle d’orientationTrouver (v , ω) pour stabiliser l’erreur ξe entre posture courante et posture deréférence.
Avec : x1 = xe, x2 = ye, x3 = tan θe, u1 = v cos θe − vr et u2 = ω−ωrcos2 θe
, définipartout sauf en θe = ±π
2 :
x1 = u1 + ωr x2,
x2 = u1x3 − ωr x1 + vr x3,
x3 = u2.
Alors :
u1 = −k1|vr |(x1 + x2x3),
u2 = −k2vr x2 − k3|vr |x3,
avec k1, k2 et k3 > 0 rend le système asymptotiquement stable si vr estsuffisamment régulière (bornée, dérivable et de dérivée bornée et ne tendantpas vers zéro lorsque t tend vers l’infini).

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (7)
Mouvements quelconques avec contrôle d’orientation
Existence de fonctions transverses liées à un groupe de champs de vecteurs.
Avec x1 = x , x2 = y , x3 = tan θ, u1 = v cos θ et u2 = ωcos2 θ
on obtient :
x1 = u1,
x2 = u1x3,
x3 = u2.
Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (7)
Mouvements quelconques avec contrôle d’orientation
Existence de fonctions transverses liées à un groupe de champs de vecteurs.
Avec x1 = x , x2 = y , x3 = tan θ, u1 = v cos θ et u2 = ωcos2 θ
on obtient :
x1 = u1,
x2 = u1x3,
x3 = u2.

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (7)
Mouvements quelconques avec contrôle d’orientation
Existence de fonctions transverses liées à un groupe de champs de vecteurs.
Avec x1 = x , x2 = y , x3 = tan θ, u1 = v cos θ et u2 = ωcos2 θ
on obtient :
x1 = u1,
x2 = u1x3,
x3 = u2.

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (8)
Vecteur de commande étendu : ue = (u1 u2 α)T .
Soit ε1 et ε2 > 0 :
fε(α) =
fε, 1(α)fε, 2(α)fε, 3(α)
=
ε1 cosα
ε1ε24 sin 2αε2 sinα
.
Avec z = x − fε(α), on a :
z = B(x , α) ue
où :
B(x , α) =
1 0 ε1 sinαx3 0 − ε1ε2
2 cos 2α0 1 −ε2 cosα
.

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (8)
Vecteur de commande étendu : ue = (u1 u2 α)T .Soit ε1 et ε2 > 0 :
fε(α) =
fε, 1(α)fε, 2(α)fε, 3(α)
=
ε1 cosα
ε1ε24 sin 2αε2 sinα
.
Avec z = x − fε(α), on a :
z = B(x , α) ue
où :
B(x , α) =
1 0 ε1 sinαx3 0 − ε1ε2
2 cos 2α0 1 −ε2 cosα
.

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (8)
Vecteur de commande étendu : ue = (u1 u2 α)T .Soit ε1 et ε2 > 0 :
fε(α) =
fε, 1(α)fε, 2(α)fε, 3(α)
=
ε1 cosα
ε1ε24 sin 2αε2 sinα
.
Avec z = x − fε(α), on a :
z = B(x , α) ue
où :
B(x , α) =
1 0 ε1 sinαx3 0 − ε1ε2
2 cos 2α0 1 −ε2 cosα
.
Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (9)
z = B(x , α) ue
CommandeLa commande ue = B(x , α)−1 K z , avec K une matrice définie négative,stabilise le robot mobile en d = 0.
ConclusionLe système converge vers z = 0 , mais B(x , α) n’est pas toujours inversible(points singuliers).
Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (9)
z = B(x , α) ue
CommandeLa commande ue = B(x , α)−1 K z , avec K une matrice définie négative,stabilise le robot mobile en d = 0.
ConclusionLe système converge vers z = 0 , mais B(x , α) n’est pas toujours inversible(points singuliers).

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (9)
z = B(x , α) ue
CommandeLa commande ue = B(x , α)−1 K z , avec K une matrice définie négative,stabilise le robot mobile en d = 0.
ConclusionLe système converge vers z = 0 , mais B(x , α) n’est pas toujours inversible(points singuliers).
Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (10)
Changement de variables plus complexe :
z =
x1 − fε, 1(α)
x2 − fε, 2(α)− x1(x3 − fε, 3(α))x3 − fε, 3(α)
.
Alors :z = D(x1)B(fε(α),α)ue
avec :
D(x1) =
1 0 00 1 −x1
0 0 1
.

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (10)
Changement de variables plus complexe :
z =
x1 − fε, 1(α)
x2 − fε, 2(α)− x1(x3 − fε, 3(α))x3 − fε, 3(α)
.
Alors :z = D(x1)B(fε(α),α)ue
avec :
D(x1) =
1 0 00 1 −x1
0 0 1
.
Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (11)
z = D(x1)B(fε(α),α)ue
CommandeLa commande ue = B(fε(α), α)−1D(x1)
−1 K z stabilise le système versz = 0 avec une convergence exponentielle et α converge ainsiexponentiellement vers une constante.
ConclusionsPas de points singuliers (D(x1) et B(fε(α), α) toujours inversibles).
Convergence de x vers 0 ajustée par ε1 et ε2 (petites valeurs : manœuvres)

Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (11)
z = D(x1)B(fε(α),α)ue
CommandeLa commande ue = B(fε(α), α)−1D(x1)
−1 K z stabilise le système versz = 0 avec une convergence exponentielle et α converge ainsiexponentiellement vers une constante.
ConclusionsPas de points singuliers (D(x1) et B(fε(α), α) toujours inversibles).
Convergence de x vers 0 ajustée par ε1 et ε2 (petites valeurs : manœuvres)
Robotique mobile
Navigation
Execution du mouvement
Stabilisation de mouvement (11)
z = D(x1)B(fε(α),α)ue
CommandeLa commande ue = B(fε(α), α)−1D(x1)
−1 K z stabilise le système versz = 0 avec une convergence exponentielle et α converge ainsiexponentiellement vers une constante.
ConclusionsPas de points singuliers (D(x1) et B(fε(α), α) toujours inversibles).
Convergence de x vers 0 ajustée par ε1 et ε2 (petites valeurs : manœuvres)