cours de robotique médicalemaster2bmm3.e-monsite.com/medias/files/robotique-medical.pdf ·...
TRANSCRIPT
Cours de robotique médicale
David.Daney sophia.inria.fr
Projet CoprinINRIA Sophia Antipolis
D. Daney INRIA Cours robotique médicale 200x 1 / 44
Historique
IEEE International Conferenceon Robotics and Automation
1992 3/423 articles
2002 40/689 articles
2004
I 25 (Medical),I 15 (biologie),I 10 (rehabilitation)
Industriel
1989 Computer Motion(AESOP, Zeus)
1992 Integrated Surgical System(Robodoc, Neuromate)
1995 Intuitive Surgical(da Vinci)
Pourquoi cette explosion ?
D. Daney INRIA Cours robotique médicale 200x 2 / 44
Comparaison Homme/Machine
La Machine
++ Précision géométrique
++ Précision dans le contrôle desefforts
++ Capacité à travailler enenvironnement hostile
++ Répétabilité
++ Pas de fatigue Inconvénients
– Peu de capacités à décider,apprendre et s’adapter
– Modèles incomplets
– Fiabilité limitée
L’homme
++ Capteurs naturels performants
++ Dextérité
++ Coordination
++ Capacité de raisonnement et depensée
++ Adaptation des compétences
– Sujet à la fatigue
– Tremblements
– Imprécision
– Incapacité de voir au travers destissus
– Sensible aux radiations
D. Daney INRIA Cours robotique médicale 200x 3 / 44
Intérêt de la collaboration Homme-Machine
Meilleure précisionSécurité accrueTraumatismes diminuésDiminution du nombre d’interventionsTemps d’hospitalisation réduit
D. Daney INRIA Cours robotique médicale 200x 4 / 44
Particularités de l’application de la robotique aumédicale
C’est un système complet :
structure mécanique,
Interface Homme-Machine (IHM),
des composants électroniques,
un contrôleur logiciel.
qui doit être sécurisé a toutes les niveaux.Problematiques:
Interaction intime avec un environement humain(comportement imprevisible patient/chirurgien)
Collisions,
Espace de travail limité.
D. Daney INRIA Cours robotique médicale 200x 5 / 44
Différence entre robot industriel et robotique médicale1/4
L’automatisation d’une tâche devient difficile
Le facteur humainconditions change en fonction du patient et du personnelmédicalLes contraintes cliniquesChaque opération, même spécialisée, est différente
D. Daney INRIA Cours robotique médicale 200x 6 / 44

Le facteur humain 2/4
PatientCondition changante
Position de la table d’opération
Caractérisatiques des organes
Caractérisatiques des tissus
accessibilité des organes
...
Sans possiblités de phase de test...
Personnel médical
Chirurgiens
Anesthésistes
infirmiers
Conséquence ...
D. Daney INRIA Cours robotique médicale 200x 7 / 44
Le facteur humain 3/4
Planification nécessaire :
? phase préopératoire
phase perception
phase décision
Le plan d’action doit être modifiable et adaptatif (diagnostic,complication, comportement patient etc ...)
IHM adaptée :
Interface orienté métier
D. Daney INRIA Cours robotique médicale 200x 8 / 44
Les contraintes cliniques 4/4
Utilisation pour des actes medicaux sprécifiques(neurochirurgie, arthroplastie,...)Champ stérile (autoclave, drap stérile)Espace de travail encombré par des appareils médicaux(radiologie, anesthésie, chirurgie, etc ...)
◦ Contrainte de positionnement(peut-être différent entre deux opérations de même nature)
→ Prendre en compte les obstacles→ Repositionner du robot (transportable, enlevé en cas de
complication)
D. Daney INRIA Cours robotique médicale 200x 9 / 44
De la spécialisation de la robotique médicale 1/2
Procédure chirurgicale utilisant des robots industriel + sécurisation
◦ [CASPAR] Stäubli RX
◦ [ROBODOC] SCARA (proche des robots Sankyo Seiki SR et IBM7576)
◦ [Drake 91], PUMA 200, résection des tumeurs du cerveau
◦ [Kazanzides 92], IBM SCARA 7576 modifié, arthroplastie sur lahanche
◦ [Kienzle 95], PUMA 560, Placement des prothèses de genou
◦ [Knappe 02], PA10 de Mitsubishi Heavy Industry, études defaisabilité en chirurgie orthopédique
◦ [Michelin 02], PA10 de Mitsubishi Heavy Industry, chirurgieendoscopique
D. Daney INRIA Cours robotique médicale 200x 10 / 44
De la spécialisation de la robotique médicale 2/2
La robotique médicale se spécialise
◦ Zeus et AESOP (Computer Motion),
◦ da Vinci (Intuitive Surgical),
◦ Hippocrate (SINTERS),
◦ Evolution 1 (URS Ortho),
◦ Surgiscope (ISIS),
◦ EndoAssist (Armstrong Healthcare),
◦ ...
D. Daney INRIA Cours robotique médicale 200x 11 / 44
Classification des robots médicaux 1/7
[Lavallée 91]: degré d’autonomie de robots
Systèmes passifs, ni moteurs, ni autonomieSystèmes semi-actifs, positionneurs et guides d outils(la puissance est coupée lors de l’intervention proprement)Systèmes actifs, une partie de l’intervention est autonome(les axes de ces derniers étant motorisés)
Intérêt : notion de sécurité
D. Daney INRIA Cours robotique médicale 200x 12 / 44
Classification des robots médicaux 2/7
[Troccaz 01] ajoute les notionssystèmes synergiquesSystèmes mus par l’actionnement du chirurgien, mais limitant etcontraignant (dynamiquement) les gestes de celui-ci, par constructionmécanique ou logiciellesystèmes de téléchirurgie + microsystèmes robotisés(redondant avec systèmes actifs ou synergiques)
D. Daney INRIA Cours robotique médicale 200x 13 / 44
Classification des robots médicaux 3/7
[Dario 96]
macro-robotique(robots de réhabilitation, d’intervention chirurgicale, stimulationfonctionnelle)micro-robotique(endoscopes et robots pour la chirurgie minimallementinvasive)bio-robotique(implants électroniques, bionique, robionique)
D. Daney INRIA Cours robotique médicale 200x 14 / 44
Classification des robots médicaux 4/7
[Dohi 93]
robots de diagnostic et de biopsie,robots thérapeutiques,robots de réhabilitation,robots aide-soignants,robots de transport d’échantillons,robots de recherche,robots d’entraînement
D. Daney INRIA Cours robotique médicale 200x 15 / 44
Classification des robots médicaux 5/7
[Thérond 96], coopération entre le système mécanique et lesacteurs médicaux
coopération chirurgien/robot(le robot apporte précision et répétabilité),coopération patient/robot(le robot apporte autonomie au patient handicapé)coopération personnel hospitalier/robot(le robot assiste le personnel médical en le soulageant detâches répétitives ou physiquement éprouvantes)
D. Daney INRIA Cours robotique médicale 200x 16 / 44
Classification des robots médicaux 6/7
[Hein 01]
les systèmes automatiques qui exécutent la tâche planifiée defaçon autonome,les systèmes de télémanipulation pour lesquels le chirurgienn’est pas directement sur le lieu de l’opération,les systèmes par contrôle interactif qui sont un mélange desdeux précédents le chirurgien est à proximité du patient.
D. Daney INRIA Cours robotique médicale 200x 17 / 44
Classification des robots médicaux 7/7
[Davies 93a]
système(allant de la simple pince chirurgicale au bras motorisé)techniques de perception(qualitative et quantitative, en pré, per ou postopératoire)
D. Daney INRIA Cours robotique médicale 200x 18 / 44
Domaines médicals d’applications
◦ arthroplastie [Taylor 91],◦ neurochirurgie [Glauser 91]◦ ponctions chirurgicales [Davies 91]
chirurgie minimallement invasive [Guthart 00] [Ginhoux02]échographie [Pierrot 99],prise de sang [Zivanovic 00],chirurgie maxillo-faciale [Lueth 98],greffe de cornée [Smith 00]...
D. Daney INRIA Cours robotique médicale 200x 19 / 44
La robotique médicale
1 Manipulation en milieu médical2 Prothèse (substitutif), orthèse (correctif), téléthèse (supplétif).3 Outils de visualisation et d’intervantion:
I Endoscope : appareil permettant l’exploration visuelle du corpshumaine(∅ ≤ 10 mm), leur robotisation peut permettrel’outillage d’une endoscopie.
I ET Laparoscopie (abdomen), colioscopie (intestin),arthroscopie (articulation), Fibroscopie bronchique (bronche),fibroscopie oeso-gastro-duodénale (oesophage), hystéroscopie(utérus).
I exemple : M2A capsule
D. Daney INRIA Cours robotique médicale 200x 20 / 44
La robotique médicale
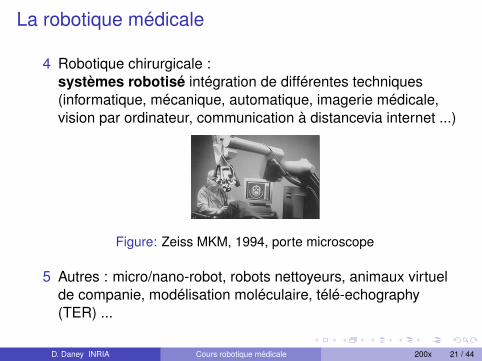
4 Robotique chirurgicale :systèmes robotisé intégration de différentes techniques(informatique, mécanique, automatique, imagerie médicale,vision par ordinateur, communication à distancevia internet ...)
Figure: Zeiss MKM, 1994, porte microscope
5 Autres : micro/nano-robot, robots nettoyeurs, animaux virtuelde companie, modélisation moléculaire, télé-echography(TER) ...
D. Daney INRIA Cours robotique médicale 200x 21 / 44
Manipulateur en milieu médicales
Fournir un positionnement, un mouvement, une trajectoire ...
au malade : table chirurgicaleà un appareil : source d’imagerie médicale (X, IRM, RMN, US,Vidéo)en milieu pharmaceutique
Figure: Genomics Institute of the Novartis Foundation
Micro-manipulation
D. Daney INRIA Cours robotique médicale 200x 22 / 44
Les prothèses, orthèses et autres téléthèses
Prothèse substitutif, orthèse correctif, téléthèse supplétifMini historique
Les béquilles (le terme apparait en 1611)Ambroise PARE (1510-1590), prothèse de cuisse,reproductible à une plus grande échelle
ApplicationsPersonnes handicapées, convalescentes, agées ...
D. Daney INRIA Cours robotique médicale 200x 23 / 44
Les prothèses, orthèses et autres téléthèses
TypesProthéses :
Interne (hanche)Externe (membres inférieurs, supérieurs),la robotique permet une meilleur approximation desmouvements réels des membres
Orthéses :MembresAmplificateur de force
D. Daney INRIA Cours robotique médicale 200x 24 / 44
Les prothèses, orthèses et autres téléthèses
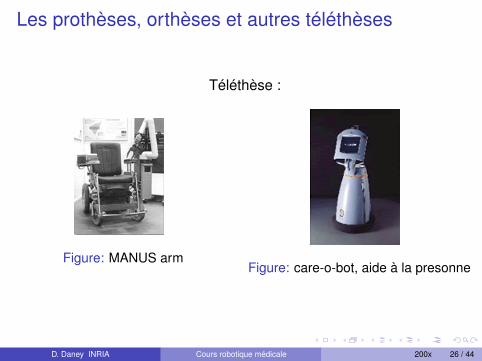
Téléthèse :
Aide au mouvement (commande vocal, simplifié)Aide à la manipulationAide au déplacementAide à la localisation (ex : aveugle)
D. Daney INRIA Cours robotique médicale 200x 25 / 44
Les prothèses, orthèses et autres téléthèses
Téléthèse :
Figure: MANUS armFigure: care-o-bot, aide à la presonne
D. Daney INRIA Cours robotique médicale 200x 26 / 44
Les prothèses, orthèses et autres téléthèses
Prothèse/orthése à movement de plus en plus compliquéles téléthèses ∼ problème de robotique classiqueCommande directe via les nerfsTravail sur les matériaux (poid, rigidité/souplesse, mémoire deforme etc ..)
film prothèse
D. Daney INRIA Cours robotique médicale 200x 27 / 44
Les endoscopes
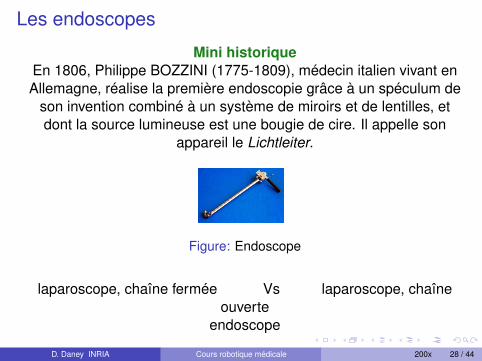
Mini historiqueEn 1806, Philippe BOZZINI (1775-1809), médecin italien vivant enAllemagne, réalise la première endoscopie grâce à un spéculum de
son invention combiné à un système de miroirs et de lentilles, etdont la source lumineuse est une bougie de cire. Il appelle son
appareil le Lichtleiter.
Figure: Endoscope
laparoscope, chaîne fermée Vs laparoscope, chaîneouverte
endoscope
D. Daney INRIA Cours robotique médicale 200x 28 / 44

La médecine à distance
∼ 1980 la télémédecineSoigner indirectement dans des milieux hostiles.
Militaire (US) : soigner les soldats sur le champ de batailleEspace (Nasa) : soigner dans l’espaceBateau de commerce
à donné naissance à :
? diagnostic → sytème expert, intelligence artificiel? Opération → robotique chirurgicale
D. Daney INRIA Cours robotique médicale 200x 29 / 44
La robotique chirurgicale
Depuis 1994, 850 opérations chirurgicales ...
ThoraciqueViscèraleOrthopédieNeurologieRadiothérapie
DaVinci
D. Daney INRIA Cours robotique médicale 200x 30 / 44
La robotique chirurgicale
Qu’est ce que c’est ? :
Intégration de système : laparoscope + microscope + tabled’opération + médecine à distance ...
À quoi ca sert ? :
OpérerSimulation : entrainement du chirurgien
une simulation
D. Daney INRIA Cours robotique médicale 200x 31 / 44
La robotique chirurgicale
Pourquoi ? :
Meilleur précisonPlus surMoins de traumatismeDiminue le nombre d’opérationConfort post-operatoireMeilleur rétablissement
une opération
D. Daney INRIA Cours robotique médicale 200x 32 / 44
La robotique chirurgicale
Exemple d’application
porte endoscopeporte outils (orthopédie)porte microscopeautre ... Récolte de peau
Avantages : Maitre - esclave
Limitation de l’espace de travailRetour d’effortTélé opération
Maitre - esclaveMaitre - esclave + retour d’effort
D. Daney INRIA Cours robotique médicale 200x 33 / 44
La sécurité des robots médicaux
D. Daney INRIA Cours robotique médicale 200x 34 / 44

Les normes européennes
Modification de la norme ISO 9000 → Directive 93/42/CEECertification EN 4600 permet le marquage CE et classe les robots
suivant:
Classe I : faible degré de risque.Classe IIa : degré moyen de risque.Classe IIb : potentiel élevé de risque.Classe III : potentiel très sérieux de risque.
D. Daney INRIA Cours robotique médicale 200x 35 / 44
Critères de classement
durée d utilisation du dispositif :de quelques minutes (temporaire) à plusieurs années(implantable),le caractère invasif ou non du dispositif,le type chirurgical ou non du dispositif,le caractère actif ou non du dispositif,la partie vitale ou non du corps concernée par le dispositif(systèmes circulatoires et nerveux centraux).
D. Daney INRIA Cours robotique médicale 200x 36 / 44
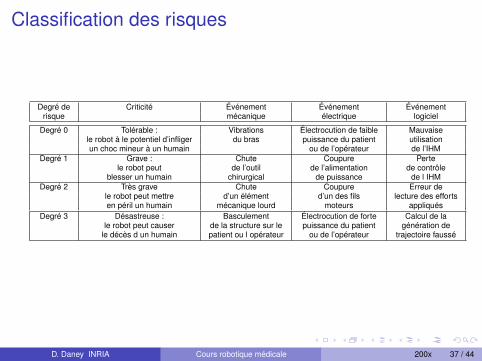
Classification des risques
Degré de Criticité Événement Événement Événementrisque mécanique électrique logiciel
Degré 0 Tolérable : Vibrations Électrocution de faible Mauvaisele robot à le potentiel d’infliger du bras puissance du patient utilisationun choc mineur à un humain ou de l’opérateur de l’IHM
Degré 1 Grave : Chute Coupure Pertele robot peut de l’outil de l’alimentation de contrôle
blesser un humain chirurgical de puissance de l IHMDegré 2 Très grave Chute Coupure Erreur de
le robot peut mettre d’un élément d’un des fils lecture des effortsen péril un humain mécanique lourd moteurs appliqués
Degré 3 Désastreuse : Basculement Électrocution de forte Calcul de lale robot peut causer de la structure sur le puissance du patient génération de
le décès d un humain patient ou l opérateur ou de l’opérateur trajectoire faussé
D. Daney INRIA Cours robotique médicale 200x 37 / 44
Principe de conception
[Davies 93a]
degré de redondance dans son contrôle et ses capteurs,
la possibilité de concevoir un système à l’aide de composantsintrinsèquement sûrs(c’est-à-dire la capacité de réduire le niveau de risque parconstruction),
la fiabilité des composants utilisés pour la fabrication.
D. Daney INRIA Cours robotique médicale 200x 38 / 44

Conception Électromécanique 1/2
Composants intrinséquement sûrs
Limitation physique plus que logiciel (puissance des actionneurs,butée mécanique) exemple : BloodBot, prise de sang, insertion <20mm, neurochirurgie, prostatectomie
Rapport de réduction (diminution des vitesses) : Pb reversibilitéexemple : + la neurochirurgie, - la chirurgie minimalement invasive
Limitateur de couples mécaniques si obstacle, le robot s’arrete ; pasles moteurs
Décrochage rapide de l’outils (fusible mécanique) AESOP,l’endoscope et le bras se déconnecte si effort trop important surl’optique
Freinage fiable, même en cas de coupure de courant : Pbréversibilité, légère secousse pour actionner/desactionner les feins,freins à manque d courant, évite l’éfondrement de la structure
D. Daney INRIA Cours robotique médicale 200x 39 / 44
Conception Électromécanique 2/2
Redondance
Doubler certains composants (panne, détérioration)exemple : frein pour le NeuroMate, Neurochirurgie stéréotaxique
Utilisation de capteurs absolues et non relatifs→ Doubler les capteurs de positionnement
D. Daney INRIA Cours robotique médicale 200x 40 / 44
Conception Électromécanique 2/3
Architecture Mécanique
Intégrer les câbles
Contrôle orienté sécuritéexemple : collisions, courant moteur s’accroit anormalement
Modélisation du robot (ddl, redondance, butées, liaisons ...)exemple : Neurochirurgie, débattement d’insertion de la sonde= +/− 30O
Modélisation mathématique
Modélisation de la planification pré-opératoire (logiciel CAO →placement du robot et autres appareils)
D. Daney INRIA Cours robotique médicale 200x 41 / 44
Sécurité électrique
Composants intrinséquement sûrs
I Pédale homme mort (Dead Man Switck, DMS)I Boutons d’arrêt d’urgence (+Procédure de redémarrage)
Redondance
I soit en parallèle : carte chien de garde, entrée-sortieI soit en série : bouton d’arrêt d’urgence, relais éléctriques
Conception éléctrique
I Système de coupure si pb élétrique détéctéI Immunité aux champs électriques, aux décharges
électrostatiques, au bruit électrique, etc...I Blindage des câbles électriques, utilisation de fils torsadés,
séparation des circuits électriques des parties alimentations(puissance) et signaux (faibles tensions), utilisation detransformateurs d’isolement
D. Daney INRIA Cours robotique médicale 200x 42 / 44
IHMDeux sources d’erreurs :
Disfonctionnement logicielle ou matérielle de l’IHM
Mauvaise utilisation de l’IHM
Solutions :
Brider l’interface
Pour chaque phase de l’opération
I Étude sémantique qui définit l’action du chirurgien pour endéduire une description fonctionnelle haut-niveau de l interface ;
I Étude syntaxique qui définit l’ordre des séquencesd’interactions, afin de structurer les actions possibles entre lutilisateur et l’interface
I Étude lexical qui décrit le type d’objet utilisé pour concevoir linterface : boutons logiciels ou matériel, avertisseurs sonores,diodes lumineuses, boîtes de dialogues logicielles ou écransLCD, etc...
D. Daney INRIA Cours robotique médicale 200x 43 / 44
Développement logiciel
Programmation en blocs fonctionnels(contrôle articulaire, contrôle Cartésien, communication avec lespériphériques et les capteurs (un par unité périphérique parexemple), communication et IHM, processus de sécurité, etc.)
En cas de conflit, d’erreur, priorité aux variables de sécurité
Multiplier les processeurs (Pb : synchonisation)(exemple : calcul d’images, contrôle d’effort, contrôle du robot)
Redondance logiciellebutée, espace de travail (robot synergique)
Alarmes logicielles(effort trop grand, vérification de positionnemnt (aiguille), CASPERmouvements anormaux du patient détecté)
Simulation de l’opération
D. Daney INRIA Cours robotique médicale 200x 44 / 44
Prothèses, orthèses et téléthèses
Figure:
D. Daney INRIA Cours robotique médicale 200x 45 / 44
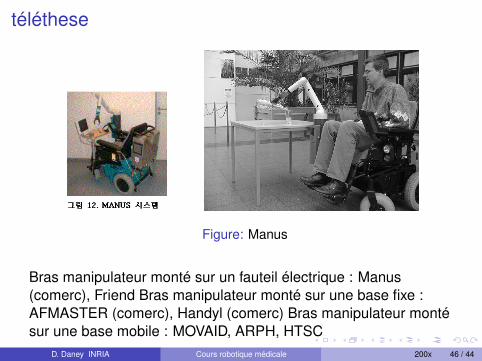
téléthese
Figure: Manus
Bras manipulateur monté sur un fauteil électrique : Manus(comerc), Friend Bras manipulateur monté sur une base fixe :AFMASTER (comerc), Handyl (comerc) Bras manipulateur montésur une base mobile : MOVAID, ARPH, HTSC
D. Daney INRIA Cours robotique médicale 200x 46 / 44
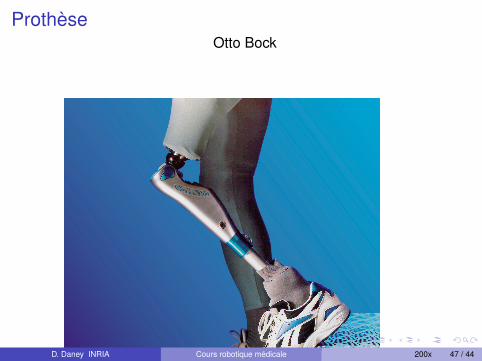
ProthèseOtto Bock
Figure: C Leg
Figure: Hand
D. Daney INRIA Cours robotique médicale 200x 47 / 44
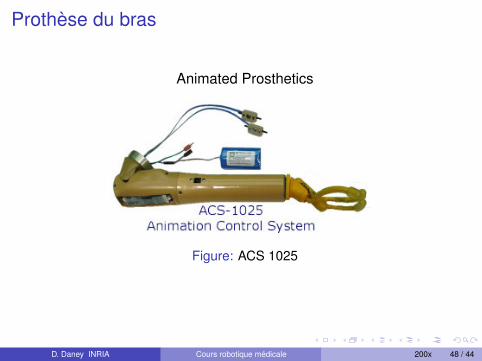
Prothèse du bras
Animated Prosthetics
Figure: ACS 1025
D. Daney INRIA Cours robotique médicale 200x 48 / 44
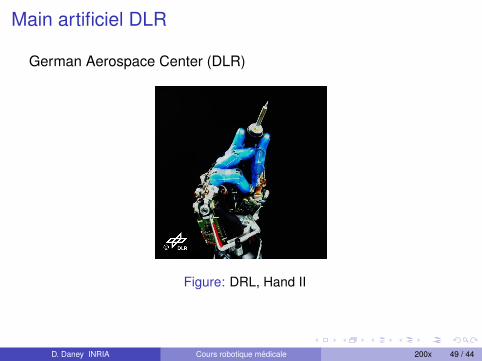
Main artificiel DLR
German Aerospace Center (DLR)
Figure: DRL, Hand II
D. Daney INRIA Cours robotique médicale 200x 49 / 44

Bras artificiel DLRGerman Aerospace Center (DLR)
Figure: DRL, LWR
Figure: DRL, LWR
D. Daney INRIA Cours robotique médicale 200x 50 / 44

Bras + Main DLRGerman Aerospace Center (DLR)
Figure: DRL, LWRFigure: DRL, Commande Maitre-esclave
D. Daney INRIA Cours robotique médicale 200x 51 / 44
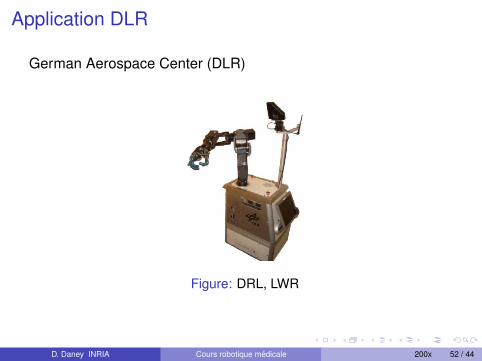
Application DLR
German Aerospace Center (DLR)
Figure: DRL, LWR
D. Daney INRIA Cours robotique médicale 200x 52 / 44
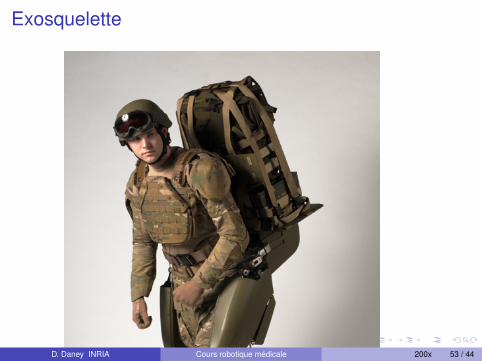
Exosquelette
Figure: BLEXX
Figure: Springwalker
D. Daney INRIA Cours robotique médicale 200x 53 / 44
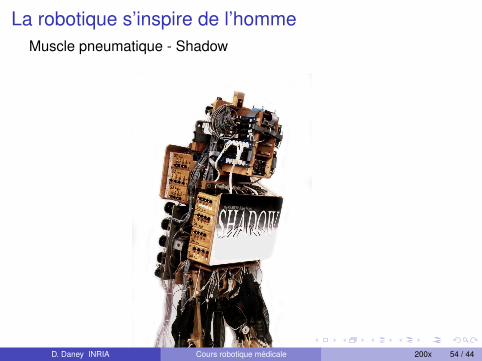
La robotique s’inspire de l’hommeMuscle pneumatique - Shadow
Figure: Biped
Figure: Hand
D. Daney INRIA Cours robotique médicale 200x 54 / 44

Main artificiel - Cyberhandhttp://www-arts.sssup.it/Cyberhand/introduction/
biomechand.htmConsortium:
Scuola Superiore di Studi Universitari e di PerfezionamentoSant’Anna, Pisa, Italy
Inail RTR Centre, Viareggio, Italy
Centro Nacional de Microelectronica, Barcelona, Spain
Fraunhofer-Institut für Biomedizinische Technik, St. Ingbert,Germany
Universidad Autonoma de Barcelona, Barcelona, Spain
Center for Sensory-Motor Interaction, Aalborg University, Aalborg,Denmark
Figure: CyberhandD. Daney INRIA Cours robotique médicale 200x 55 / 44

Main artificiel - Cyberhand8 ddl/finger (dont 2 passif)
Figure: RTR
Figure: Gant
D. Daney INRIA Cours robotique médicale 200x 56 / 44
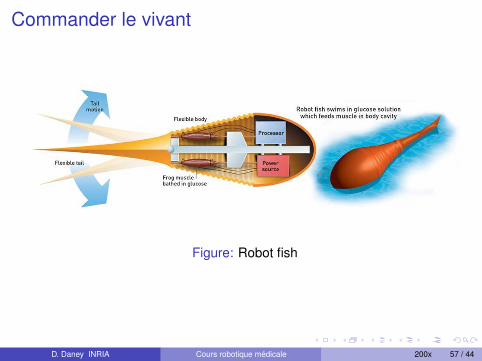
Commander le vivant
Figure: Robot fish
D. Daney INRIA Cours robotique médicale 200x 57 / 44

Interaction homme-machine
Commander de cafard
Commander par la pensée
Projet DEMAR
D. Daney INRIA Cours robotique médicale 200x 58 / 44
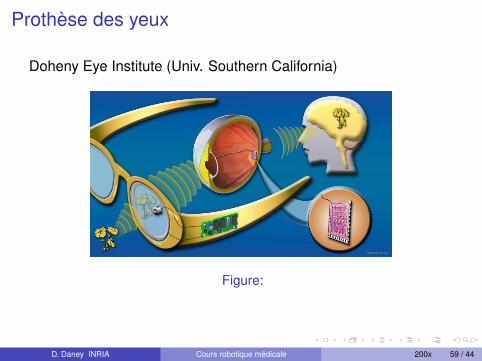
Prothèse des yeux
Doheny Eye Institute (Univ. Southern California)
Figure:
D. Daney INRIA Cours robotique médicale 200x 59 / 44
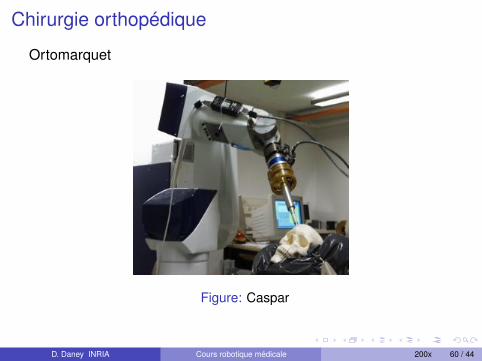
Chirurgie orthopédique
Ortomarquet
Figure: Caspar
D. Daney INRIA Cours robotique médicale 200x 60 / 44
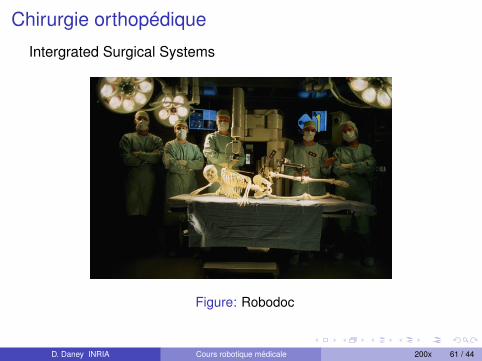
Chirurgie orthopédique
Intergrated Surgical Systems
Figure: Robodoc
D. Daney INRIA Cours robotique médicale 200x 61 / 44
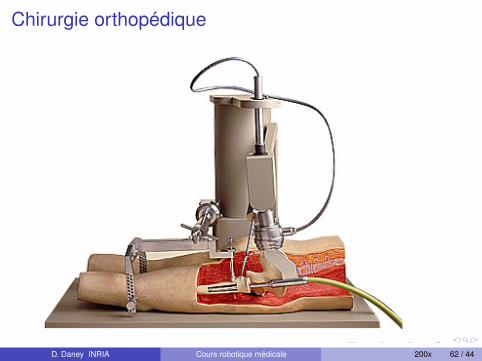
Chirurgie orthopédique
Figure: Robodoc Figure: Système de vision
D. Daney INRIA Cours robotique médicale 200x 62 / 44
Endoscopie - AESOP 3000
Computer Motion
Figure:
D. Daney INRIA Cours robotique médicale 200x 63 / 44
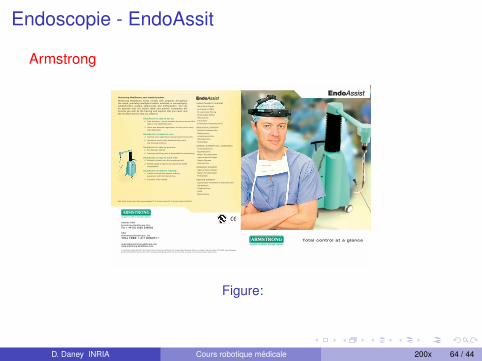
Endoscopie - EndoAssit
Armstrong
Figure:
D. Daney INRIA Cours robotique médicale 200x 64 / 44

Chirurgie minimallement invasive - da Vinci
Intuitive Surgical
Figure: Vue générale
D. Daney INRIA Cours robotique médicale 200x 65 / 44

Chirurgie minimallement invasive - da Vinci
Figure: Surgeon consolFigure: Patient-side cart
D. Daney INRIA Cours robotique médicale 200x 66 / 44

Chirurgie minimallement invasive - da Vinci
Figure: Endoscope 3D
Figure: Instruments
D. Daney INRIA Cours robotique médicale 200x 67 / 44

Chirurgie minimallement invasive - ZeusComputer Motion
Figure:
Figure:
D. Daney INRIA Cours robotique médicale 200x 68 / 44

Chirurgie minimallement invasive - Zeus
Figure: MaitreFigure: Esclave
D. Daney INRIA Cours robotique médicale 200x 69 / 44

Orthopédie - CASPAR
URS
Figure:
D. Daney INRIA Cours robotique médicale 200x 70 / 44
Orthopédie - ROBODOC
ISS
Figure:
D. Daney INRIA Cours robotique médicale 200x 71 / 44
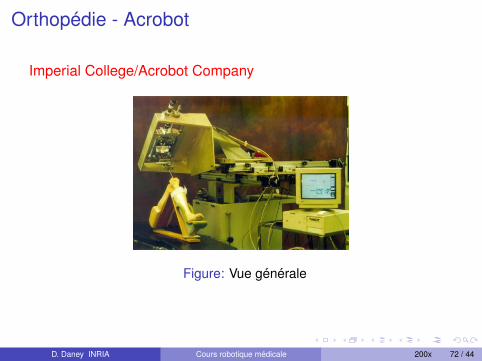
Orthopédie - Acrobot
Imperial College/Acrobot Company
Figure: Vue générale
D. Daney INRIA Cours robotique médicale 200x 72 / 44
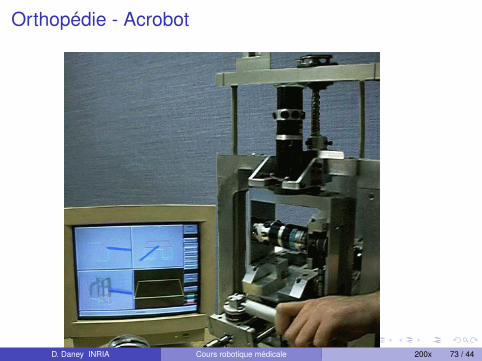
Orthopédie - Acrobot
Figure: Tâche
Figure: Détails
D. Daney INRIA Cours robotique médicale 200x 73 / 44
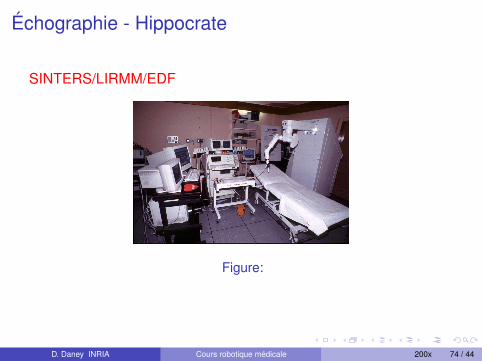
Échographie - Hippocrate
SINTERS/LIRMM/EDF
Figure:
D. Daney INRIA Cours robotique médicale 200x 74 / 44
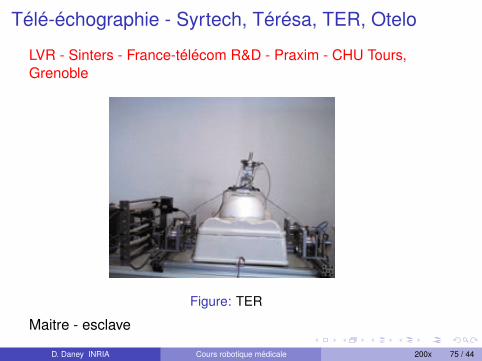
Télé-échographie - Syrtech, Térésa, TER, Otelo
LVR - Sinters - France-télécom R&D - Praxim - CHU Tours,Grenoble
Figure: TER Figure: TER
Maitre - esclave
D. Daney INRIA Cours robotique médicale 200x 75 / 44
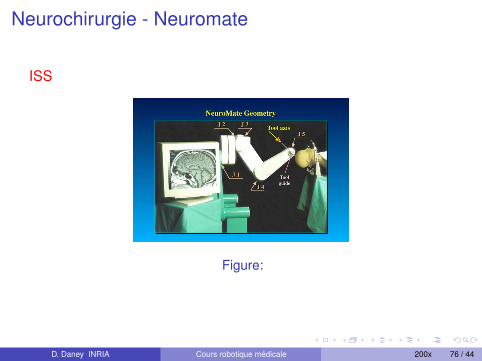
Neurochirurgie - Neuromate
ISS
Figure:
D. Daney INRIA Cours robotique médicale 200x 76 / 44

Neurochirurgie - PathFinder
Armstrong
Figure:
Brochure
D. Daney INRIA Cours robotique médicale 200x 77 / 44
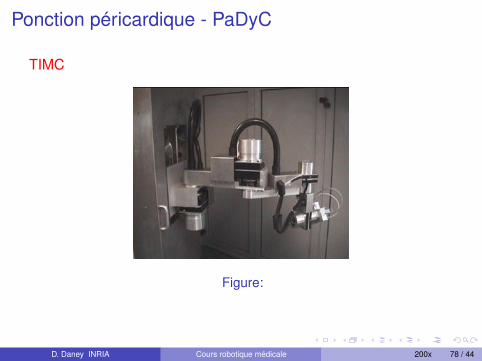
Ponction péricardique - PaDyC
TIMC
Figure:
D. Daney INRIA Cours robotique médicale 200x 78 / 44

Prévévement cutané - SCALPP
SINTERS/LIRMM
Figure:
D. Daney INRIA Cours robotique médicale 200x 79 / 44
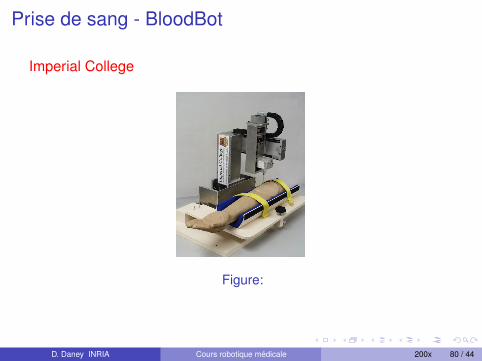
Prise de sang - BloodBot
Imperial College
Figure:
D. Daney INRIA Cours robotique médicale 200x 80 / 44
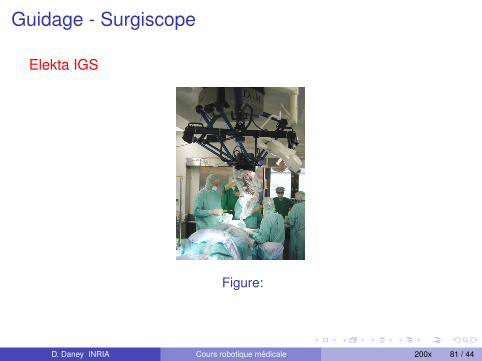
Guidage - Surgiscope
Elekta IGS
Figure:
D. Daney INRIA Cours robotique médicale 200x 81 / 44
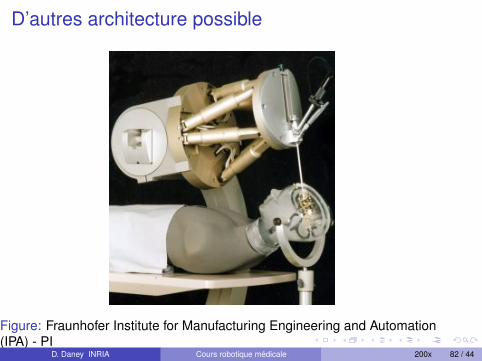
D’autres architecture possible
Figure: Fraunhofer Institute for Manufacturing Engineering and Automation(IPA) - PI
Figure: Technion-Israel Institute of Technology
D. Daney INRIA Cours robotique médicale 200x 82 / 44
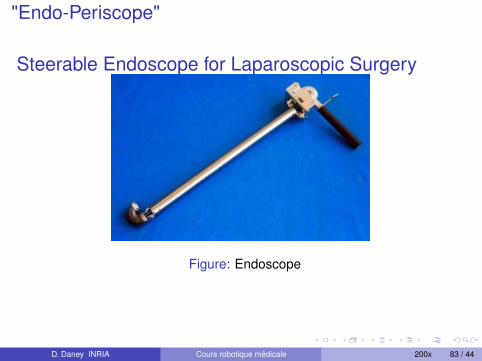
Steerable Endoscope for Laparoscopic Surgery
"Endo-Periscope"
Figure: Endoscope
D. Daney INRIA Cours robotique médicale 200x 83 / 44
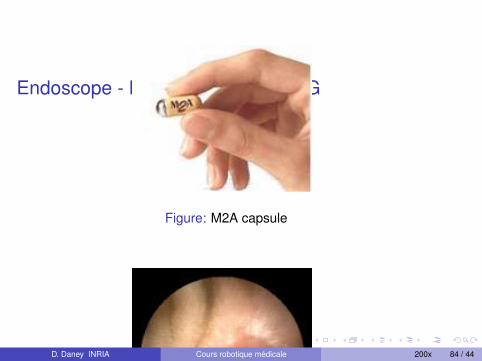
Endoscope - M2A GIVEN IMAGING
Figure: M2A capsule
Figure: M2A image
Figure:
Inside the M2A Capsule
1. Optical dome
2. Lens holder
3. Lens
4. Illuminating LEDs (Light Emitting Diode)
5. CMOS (Complementary Metal Oxide Semiconductor) imager
6. Battery
7. ASIC (Application Specific Integrated Circuit) transmitter
8. Antenna
D. Daney INRIA Cours robotique médicale 200x 84 / 44

Outils - MIPS
Figure: MIPS
D. Daney INRIA Cours robotique médicale 200x 85 / 44
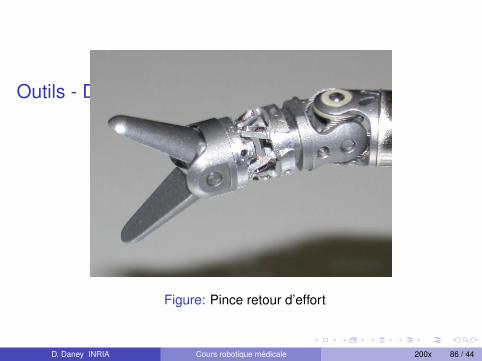
Outils - DLR
Figure: Pince retour d’effort
D. Daney INRIA Cours robotique médicale 200x 86 / 44
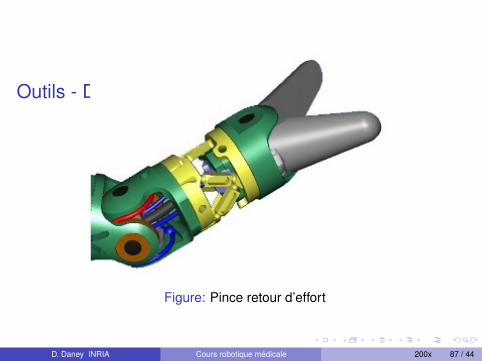
Outils - DLR
Figure: Pince retour d’effort
D. Daney INRIA Cours robotique médicale 200x 87 / 44
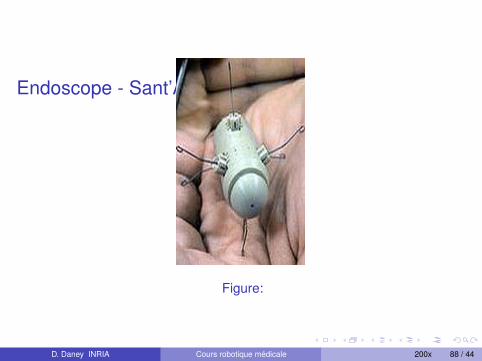
Endoscope - Sant’Anna
Figure:
D. Daney INRIA Cours robotique médicale 200x 88 / 44

Endoscope - MUSYC
A MUltifunctional mini-robot SYstem for endosCopy
Figure:
D. Daney INRIA Cours robotique médicale 200x 89 / 44