review of selected surface graphics topics (1) jian huang, cs 594, spring 2002
TRANSCRIPT
Review of Selected Surface Graphics Topics (1)
Jian Huang, CS 594, Spring 2002

Visible Light
3-Component Color
• The de facto representation of color on screen display is RGB.
• Some printers use CMY(K)• Why?
– The color spectrum can not be represented by 3 basis functions?
– But the cone receptors in human eye are of 3 types, roughly sensitive to 430nm, 560nm, and 610nm
RGB
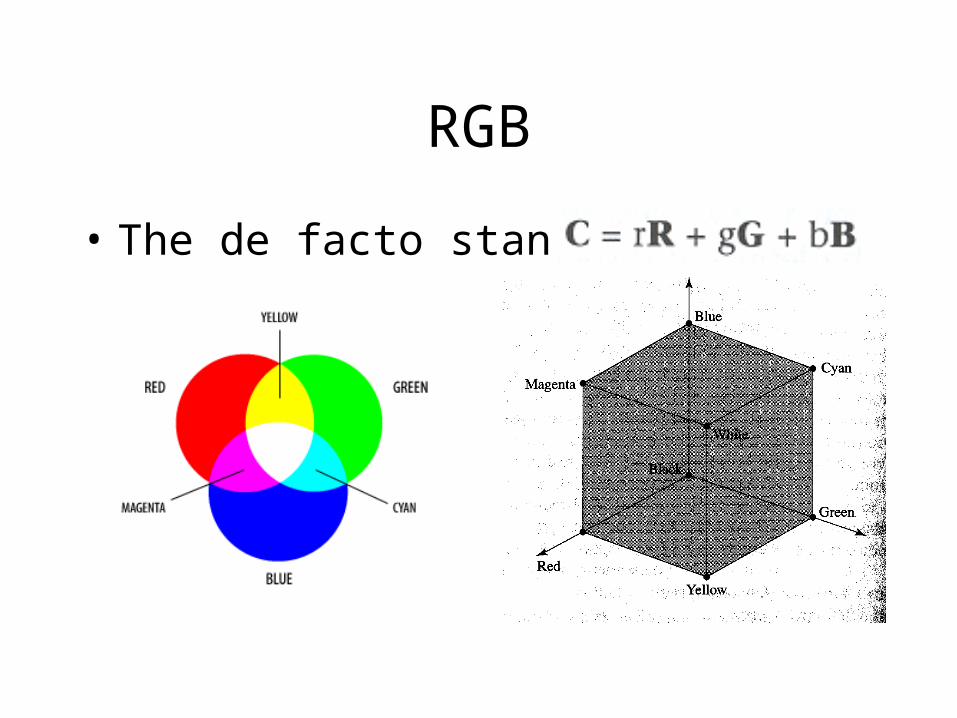
• The de facto standard
Raster Displays
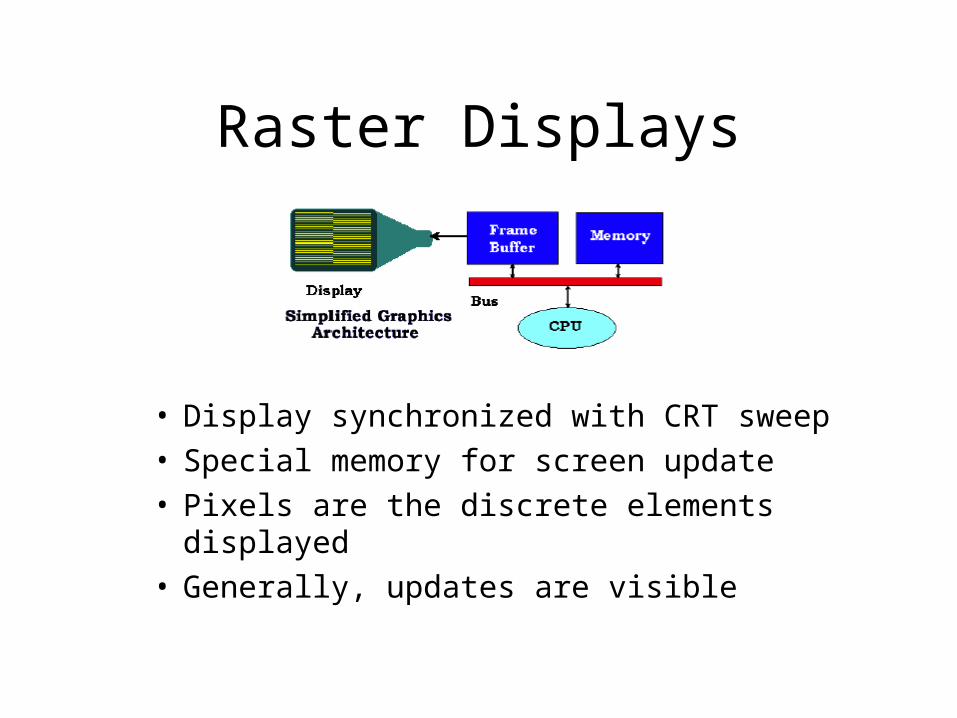
• Display synchronized with CRT sweep• Special memory for screen update• Pixels are the discrete elements displayed• Generally, updates are visible

Polygon Mesh
• Set of surface polygons that enclose an object interior, polygon mesh
• De facto: triangles, triangle mesh.
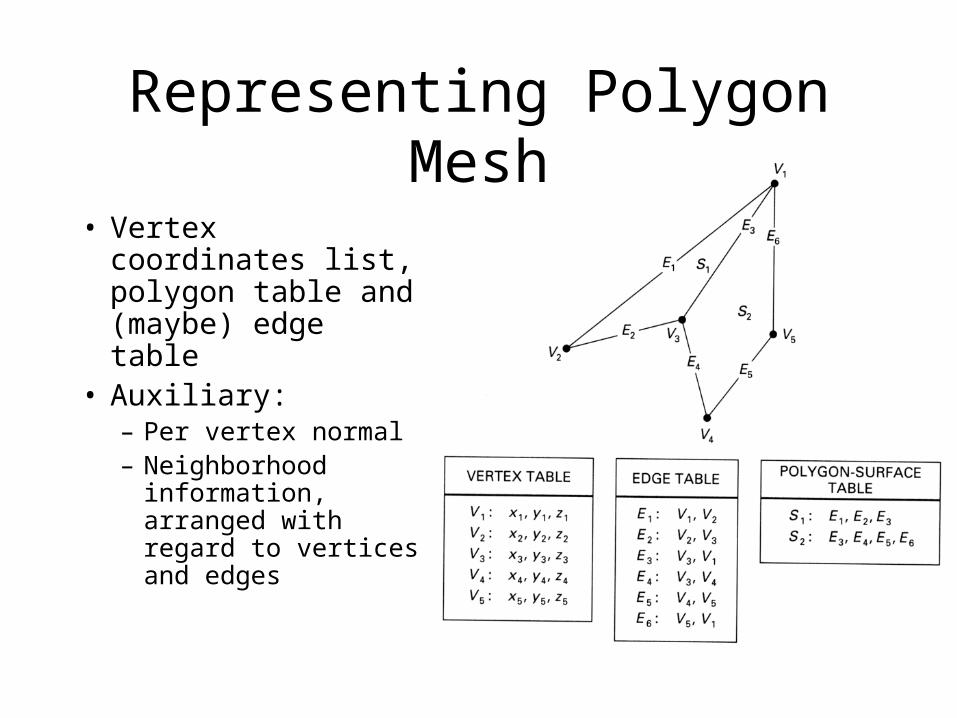
Representing Polygon Mesh
• Vertex coordinates list, polygon table and (maybe) edge table
• Auxiliary:– Per vertex normal– Neighborhood
information, arranged with regard to vertices and edges
Viewing Pipeline
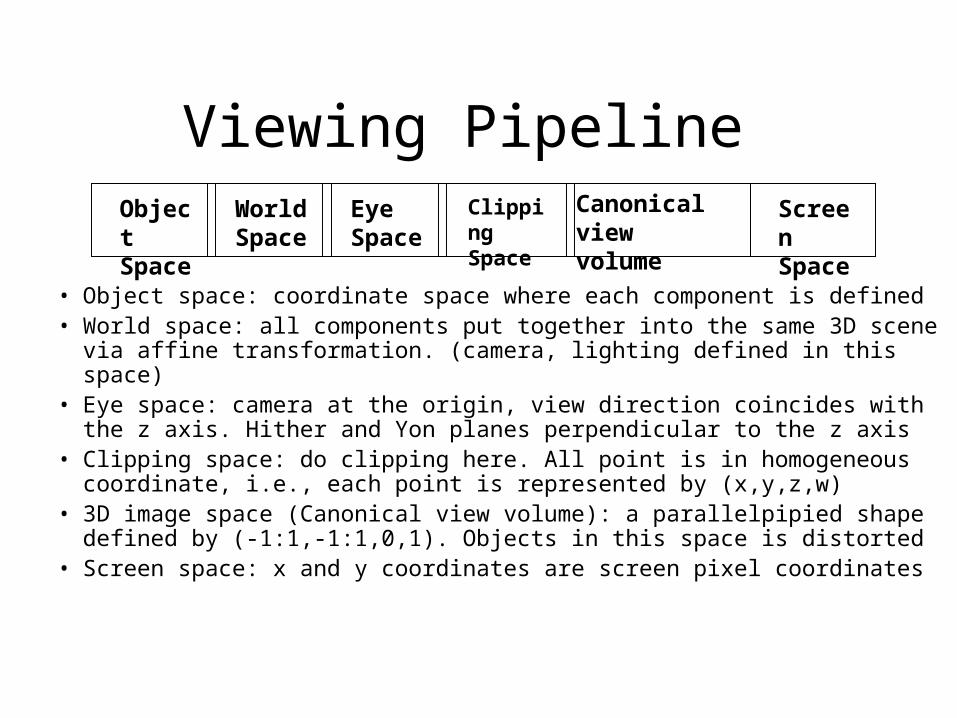
• Object space: coordinate space where each component is defined• World space: all components put together into the same 3D scene
via affine transformation. (camera, lighting defined in this space)• Eye space: camera at the origin, view direction coincides with the
z axis. Hither and Yon planes perpendicular to the z axis• Clipping space: do clipping here. All point is in homogeneous
coordinate, i.e., each point is represented by (x,y,z,w)• 3D image space (Canonical view volume): a parallelpipied shape
defined by (-1:1,-1:1,0,1). Objects in this space is distorted• Screen space: x and y coordinates are screen pixel coordinates
Object Space
World Space
Eye Space
Clipping Space
Canonical view volume
Screen Space

Spaces: ExampleObject Space and World Space:
Eye-Space:
eye
3.
Spaces: Example
Clip Space:
Image Space:
1. 2.
3. 4.
5. 6.

Homogeneous Coordinates
• Matrix/Vector format for translation:

Translation in Homogenous Coordinates
• There exists an inverse mapping for each function
• There exists an identity mapping

Why these properties are important
• when these conditions are shown for any class of functions it can be proven that such a class is closed under composition
• i. e. any series of translations can be composed to a
single translation.
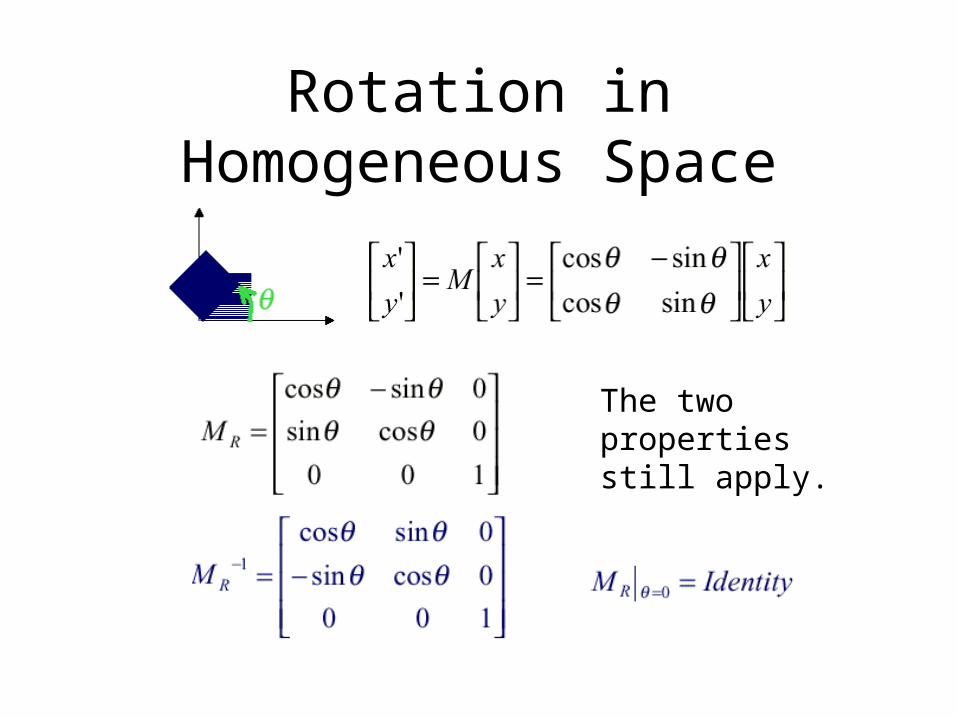
Rotation in Homogeneous Space
The two properties still apply.
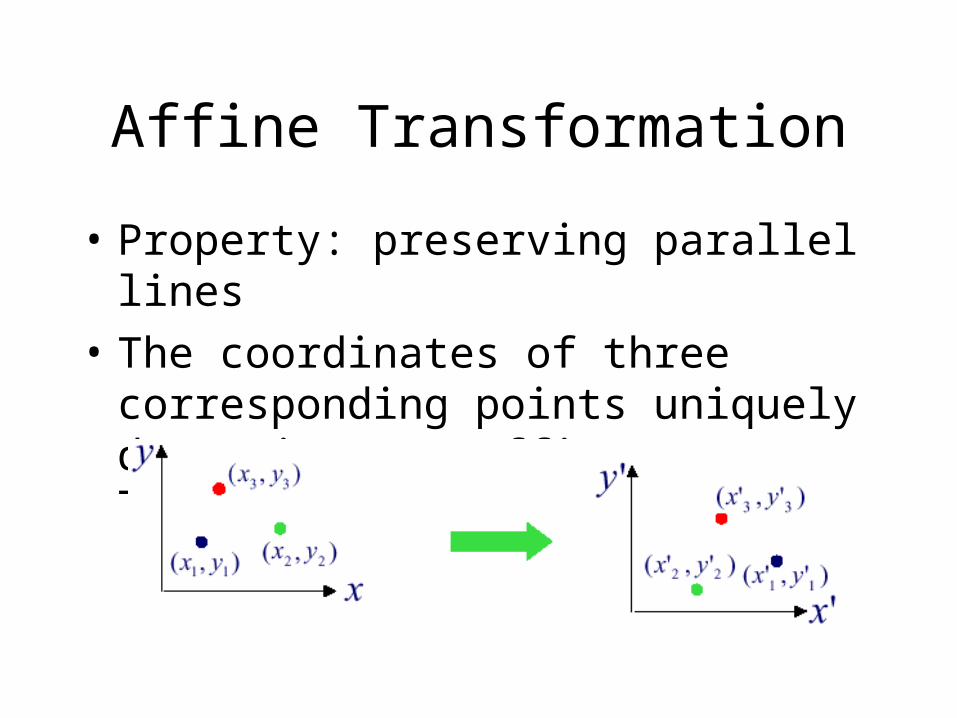
Affine Transformation
• Property: preserving parallel lines
• The coordinates of three corresponding points uniquely determine any Affine Transform!!

Affine Transformations
• Translation
• Rotation
• Scaling
• Shearing
T

Affine Transformation in 3D
• Translation
• Rotate
• Scale
• Shear

Viewing
• Object space to World space: affine transformation
• World space to Eye space: how?
• Eye space to Clipping space involves projection and viewing frustum
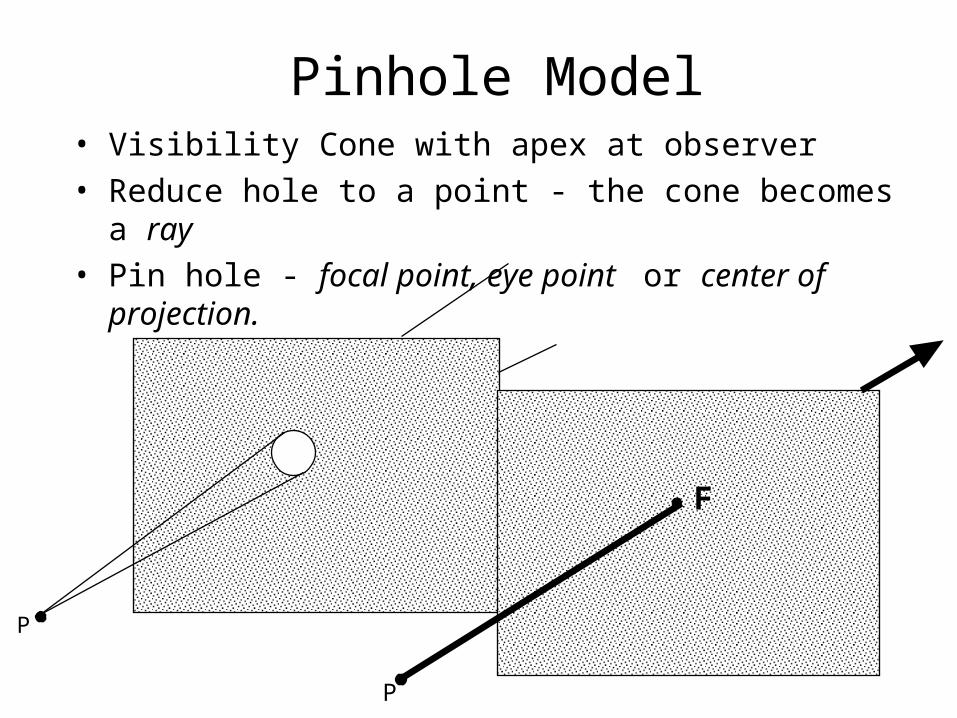
Pinhole Model• Visibility Cone with apex at observer• Reduce hole to a point - the cone becomes a ray• Pin hole - focal point, eye point or center of
projection.
P
P
F

Perspective Projectionand Pin Hole Camera
• Projection point sees anything on ray through pinhole F
• Point W projects along the ray through F to appear at I (intersection of WF with image plane)
F
Image
WorldI
W
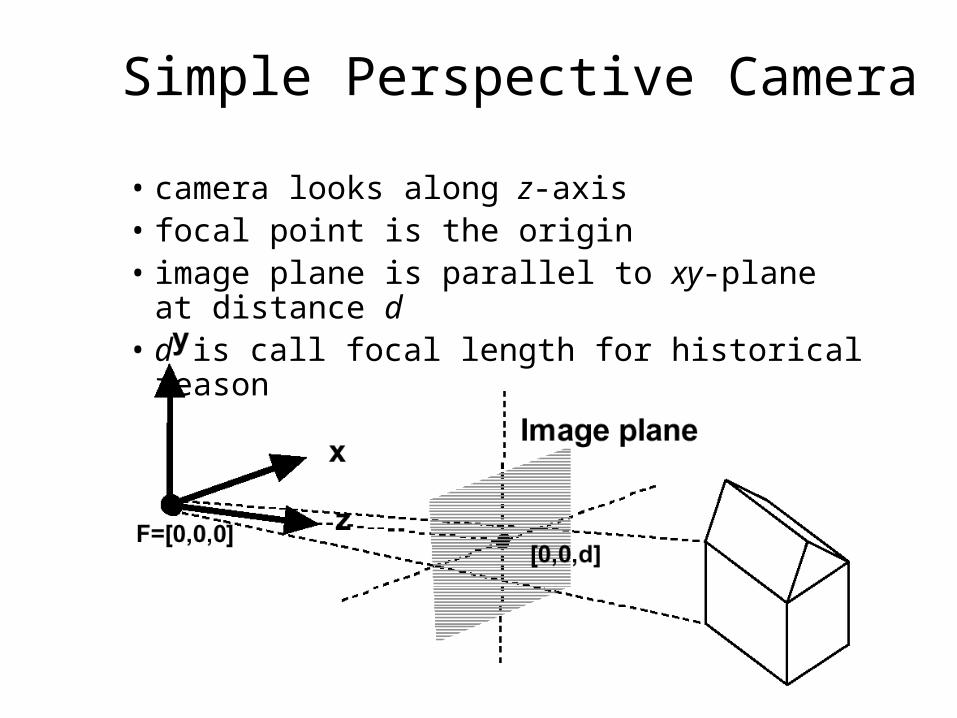
Simple Perspective Camera
• camera looks along z-axis• focal point is the origin• image plane is parallel to xy-plane at
distance d• d is call focal length for historical reason
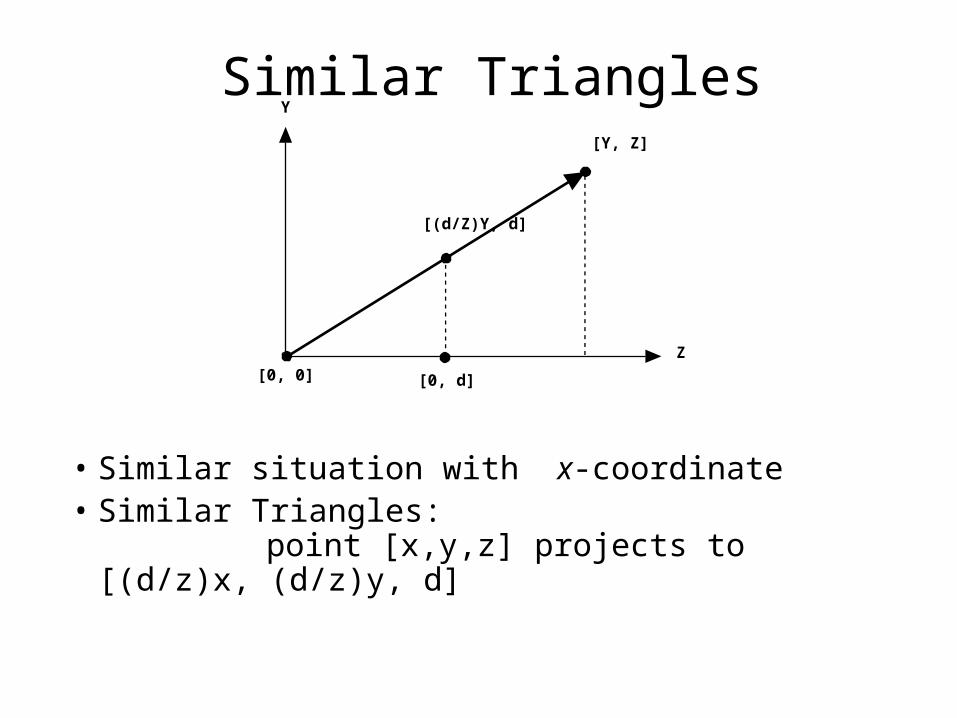
Similar TrianglesY
Z
[0, d][0, 0]
[Y, Z]
[(d/Z)Y, d]
• Similar situation with x-coordinate• Similar Triangles:
point [x,y,z] projects to [(d/z)x, (d/z)y, d]

View Volume
• Defines visible region of space, pyramid edges are clipping planes
• Frustum :truncated pyramid with near and far clipping planes
– Near (Hither) plane ? Don’t care about behind the camera
– Far (Yon) plane, define field of interest, allows z to be scaled to a limited fixed-point value for z-buffering.
Why do clipping
• Clipping is a visibility preprocess. In real-world scenes clipping can remove a substantial percentage of the environment from consideration.
• Clipping offers an important optimization
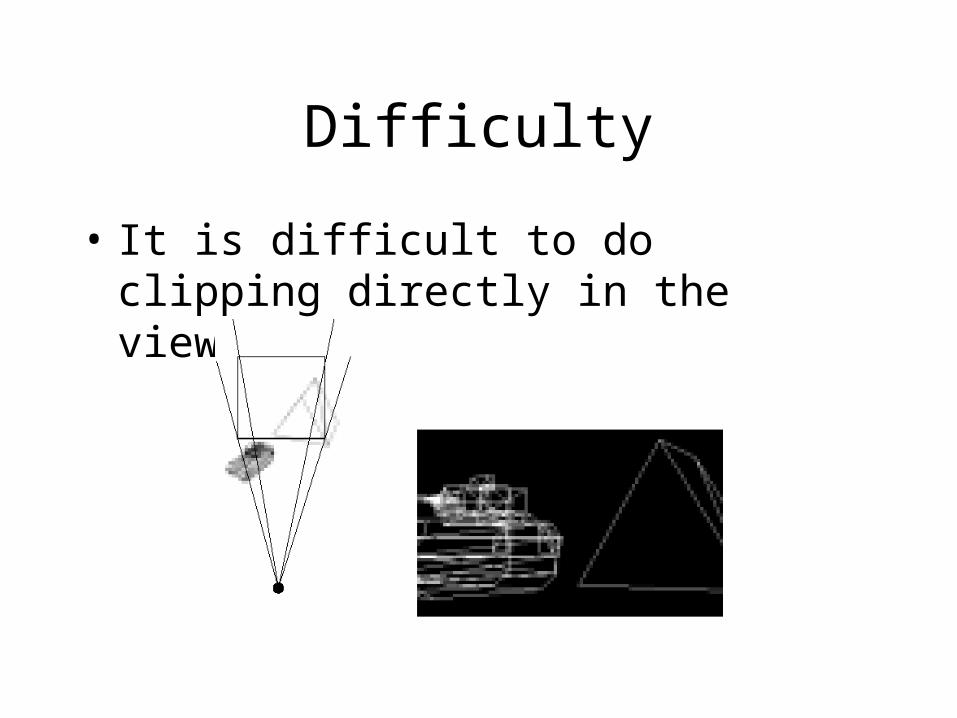
Difficulty
• It is difficult to do clipping directly in the viewing frustum

Canonical View Volume
• Normalize the viewing frustum to a cube, canonical view volume
• Converts perspective frustum to orthographic frustum – perspective transformation
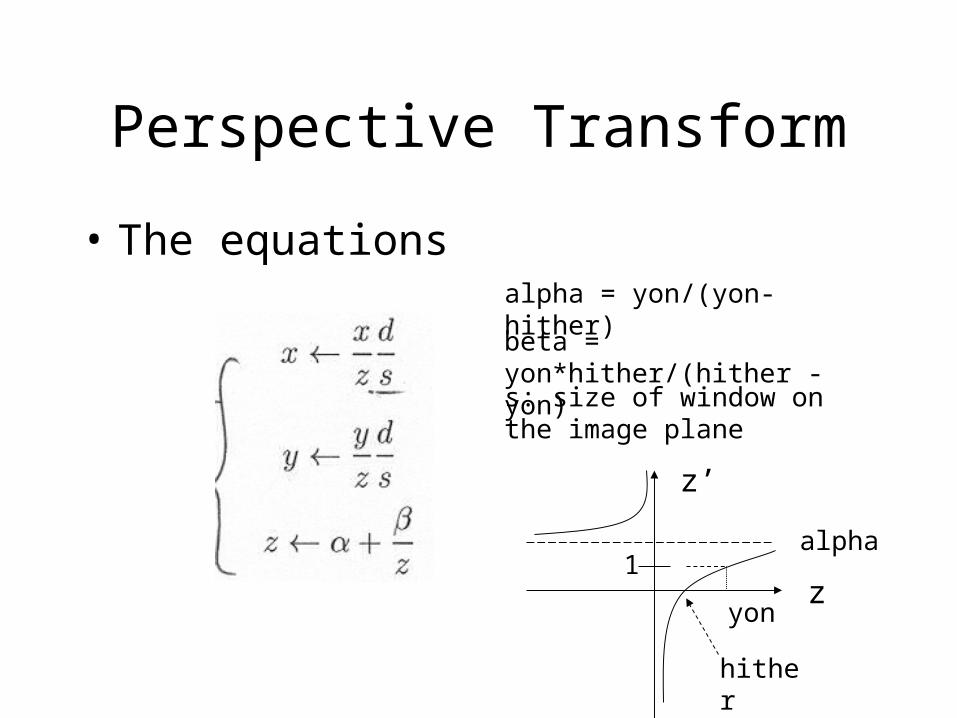
Perspective Transform
• The equationsalpha = yon/(yon-hither)
beta = yon*hither/(hither - yon)
s: size of window on the image plane
z
z’
1alpha
yon
hither
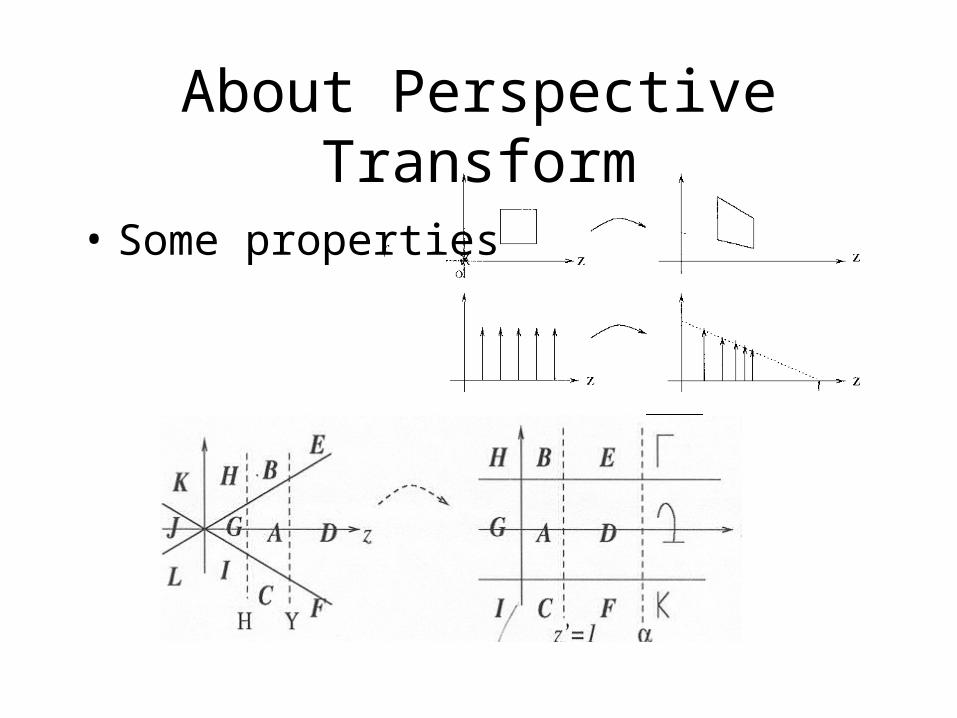
About Perspective Transform
• Some properties
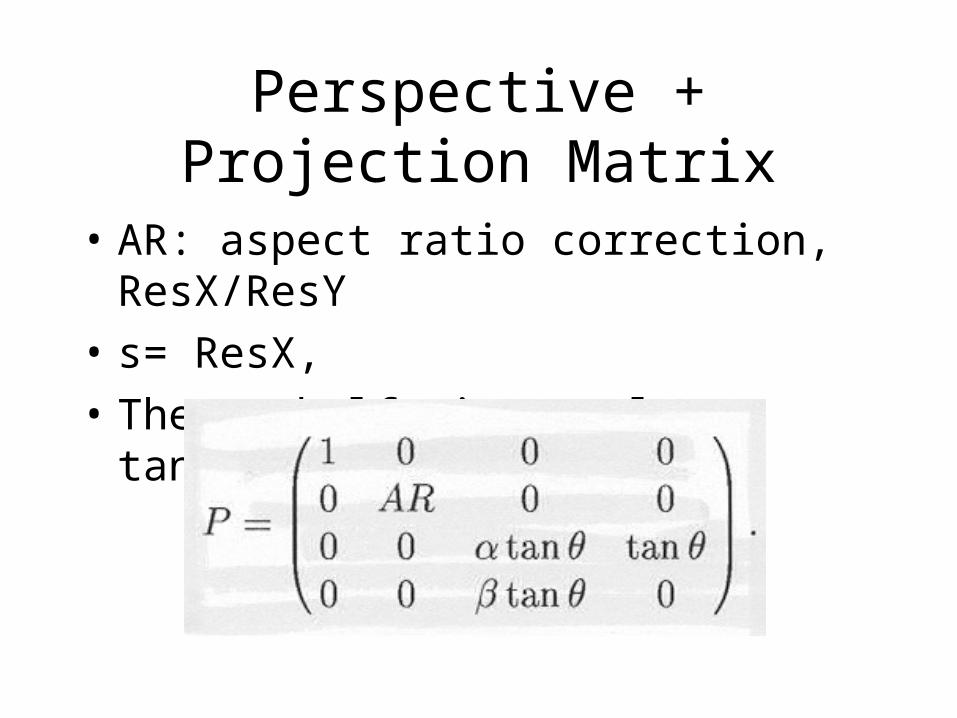
Perspective + Projection Matrix
• AR: aspect ratio correction, ResX/ResY
• s= ResX,
• Theta: half view angle, tan(theta) = s/d
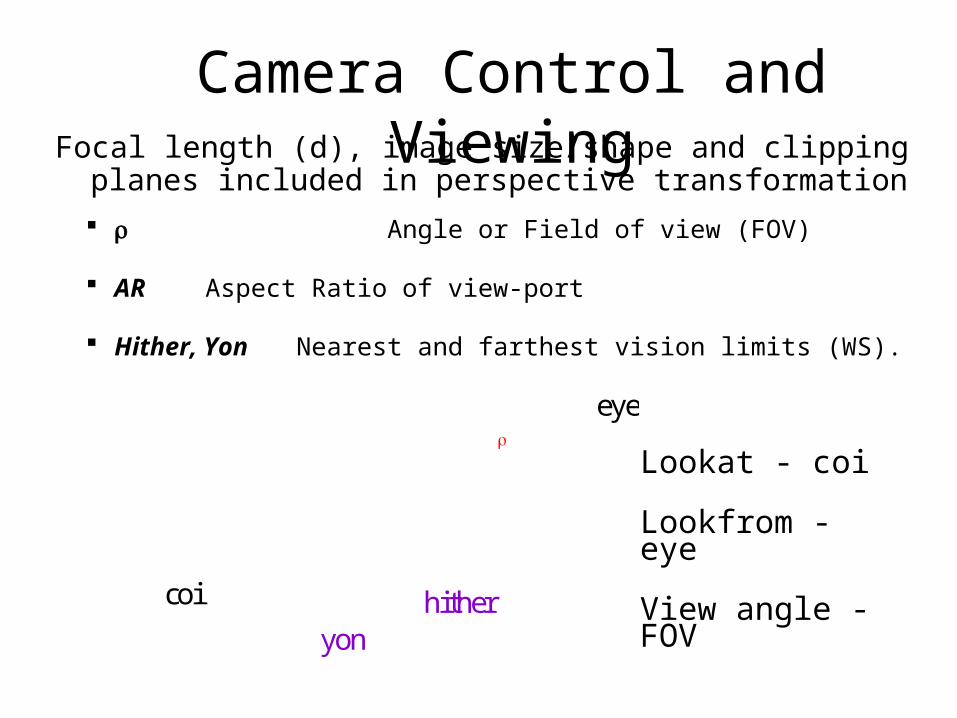
Camera Control and ViewingFocal length (d), image size/shape and clipping planes included in
perspective transformation
Angle or Field of view (FOV)
AR Aspect Ratio of view-port
Hither, Yon Nearest and farthest vision limits (WS).
eye
coi
hitheryon
Lookat - coi
Lookfrom - eye
View angle - FOV
Complete Perspective
• Specify near and far clipping planes - transform z between znear and zfar on to a fixed range
• Specify field-of-view (fov) angle• OpenGL’s glFrustum and gluPerspective do
these

More Viewing Parameters
Camera, Eye or Observer:lookfrom:location of focal point or cameralookat: point to be centered in image
Camera orientation about the lookat-lookfrom axis
vup: a vector that is pointing straight up in the image. This is like an
orientation.

Point Clipping
(x, y) is inside iff
Xmin Xmax
Ymin
Ymax
Xmin x Xmax Ymin y Ymax
AND
One Plane At a Time Clipping(a.k.a. Sutherland-Hodgeman Clipping)• The Sutherland-Hodgeman triangle clipping
algorithm uses a divide-and-conquer strategy. • Clip a triangle against a single plane. Each of the
clipping planes are applied in succession to every triangle.
• There is minimal storage requirements for this algorithm, and it is well suited to pipelining.
• It is often used in hardware implementations.

Sutherland-HodgmanPolygon Clipping Algorithm
Subproblem: clip a polygon (input: vertex list) against a
single clip edges output the vertex list(s) for the resulting
clipped polygon(s) Clip against all four planes
generalizes to 3D (6 planes) generalizes to any convex clip
polygon/polyhedron Used in viewing transforms

Polygon Clipping At Work

With Pictures

4DPolygonClip
Use Sutherland Hodgman algorithm
Use arrays for input and output lists
There are six planes of course !

4D Clipping• Point A is inside, Point B is outside. Clip edge AB
x = Ax + t(Bx – Ax)
y = Ay + t(By – Ay)
z = Az + t(Bz – Az)
w = Aw + t(Bw – Aw)
• Clip boundary: x/w = 1 i.e. (x–w=0); w-x = Aw – Ax + t(Bw – Aw – Bx + Ax) = 0
Solve for t.

Why Homogeneous Clipping• Efficiency/Uniformity: A single clip procedure is
typically provided in hardware, optimized for canonical view volume.
• The perspective projection canonical view volume can be transformed into a parallel-projection view volume, so the same clipping procedure can be used.
• But for this, clipping must be done in homogenous coordinates (and not in 3D). Some transformations can result in negative W : 3D clipping would not work.
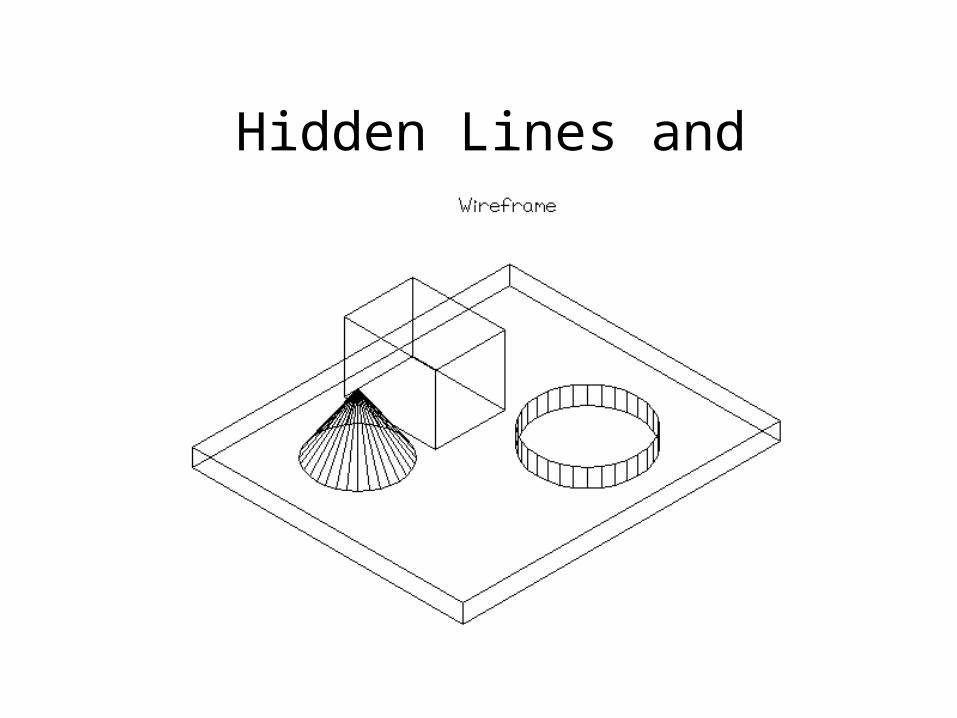
Hidden Lines and Surfaces
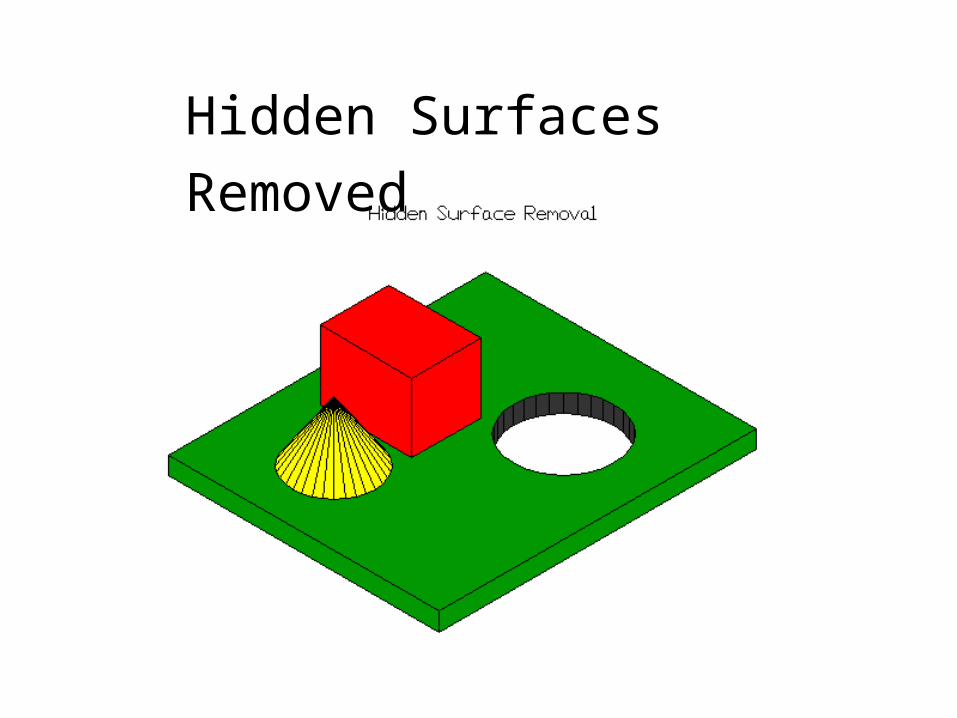
Hidden Surfaces Removed

Where Are We ?Canonical view volume (3D image space)
Clipping done
division by w
z > 0
x
y
znear far
clipped line
1
11
0
x
y
z
image plane
near far
clipped line

Painters AlgorithmSort objects in depth order
Draw all from Back-to-Front (far-to-near)
Is it so simple?
at z = 22, at z = 18, at z = 10,
1 2 3
X
Y

3D CyclesHow do we deal with cycles?
Deal with intersections
How do we sort objects that overlap in Z?
Z
Form of the Input
Object types: what kind of objects does it handle?
convex vs. non-convex
polygons vs. everything else - smooth curves, non-continuous surfaces, volumetric data

Object Space
Geometry in, geometry out
Independent of image resolution
Followed by scan conversion
Form of the output
Image Space
Geometry in, image out
Visibility only at pixels
Precision: image/object space?
Object Space Algorithms
Volume testing – Weiler-Atherton, etc.
input: convex polygons + infinite eye pt
output: visible portions of wireframe edges
Image-space algorithms
Traditional Scan Conversion and Z-buffering
Hierarchical Scan Conversion and Z-buffering
input: any plane-sweepable/plane-boundable objects
preprocessing: none
output: a discrete image of the exact visible set
Z-buffer
Z-buffer is a 2D array that stores a depth value for each pixel.
InitScreen:
for i := 0 to N do
for j := 1 to N do
Screen[i][j] := BACKGROUND_COLOR; Zbuffer[i][j] := ;
DrawZpixel (x, y, z, color)
if (z <= Zbuffer[x][y]) then
Screen[x][y] := color; Zbuffer[x][y] := z;

Z-buffer: Scanline
I. for each polygon do for each pixel (x,y) in the polygon’s projection do z := -(D+A*x+B*y)/C; DrawZpixel(x, y, z, polygon’s color);
II. for each scan-line y do for each “in range” polygon projection do for each pair (x1, x2) of X-intersections do for x := x1 to x2 do z := -(D+A*x+B*y)/C; DrawZpixel(x, y, z, polygon’s color);
If we know zx,y at (x,y) than: zx+1,y = zx,y - A/C
Spanning Scan-Line
Can we do better than scan-line Z-buffer ?
Scan-line z-buffer does not exploit
Scan-line coherency across multiple scan-lines
Or span-coherence !
Depth coherency
How do you deal with this – scan-conversion algorithm and a little
more data structure

Spanning Scan Line Algorithm
• Use no z-buffer• Each scan line is subdivided into
several "spans"• Determine which polygon the
current span belongs to• Shade the span using the current
polygon’s color• Exploit "span coherence" :• For each span, only one visibility
test needs to be done

surround intersect contained disjoint
Area Subdivision 1
(Warnock’s Algorithm)Divide and conquer: the relationship of a display area and a polygon after projection is one of the four basic cases:
Warnock : One Polygonif it surrounds then
draw_rectangle(poly-color);
else begin
if it intersects thenpoly := intersect(poly, rectangle);
draw_rectangle(BACKGROUND);draw_poly(poly);
end else;
What about contained and disjoint ?
Warnock’s Algorithm• Starting from the entire display area, we check the following four
cases. If none holds, we subdivide the area, otherwise, we stop and perform the action associated with the case1. All polygons are disjoint wrt the area -> draw the background
color2. Only 1 intersecting or contained polygon -> draw background,
and then draw the contained portion of the polygon3. There is a single surrounding polygon -> draw the entire area in
the polygon’s color4. There are more than one intersecting, contained, or surrounding
polygons, but there is a front surrounding polygon -> draw the entire area in the polygon’s color
• The recursion stops when you are at the pixel level

At Single Pixel Level
• When the recursion stop and none of the four cases hold, we need to perform depth sort and draw the polygon with the closest Z value
• The algorithm is done at the object space level, except scan conversion and clipping are done at the image space level
Area Subdivision 2
Weiler -Atherton Algorithm
Object space
Like Warnock
Output – polygons of arbitrary accuracy
Weiler -Atherton Algorithm
• Subdivide along polygon boundaries (unlike Warnock’s rectangular boundaries in image space);
• Algorithm: 1. Sort the polygons based on their minimum z distance2. Choose the first polygon P in the sorted list 3. Clip all polygons left against P, create two lists:
– Inside list: polygon fragments inside P (including P)– Outside list: polygon fragments outside P
4. All polygon fragments on the inside list that are behind P are discarded. If there are polygons on the inside list that are in front of P, go back to step 3), use the ’offending’ polygons as P
5. Display P and go back to step (2)

tr
tr
1 32
List Priority Algorithms• Object space methods: only draw the front ‘one’
– Depth comparison– Object splitting
• Image space methods: draw ‘all’– Scan conversion (have pixel level comparisons)
• List Priority algorithms (Hybrid algorithms) combines the two: do both depth comparison and object splitting (for penetration cases only), AND scan conversion (but no per-pixel comparisons)– Newell-Newell-Sancha (aka Depth-sort)– Binary Space Partition Tree (BSP Tree)
List Priority Algorithms
If objects do not overlap in X or in Y there is no need for hidden object removal process.
If they do not overlap in the Z dimension they can be sorted by Z and rendered in back (highest priority)-to-front (lowest priority) order (Painter’s Algorithm).
It is easy then to implement transparency.
How do we sort ? – different algorithms differ
Binary Space-Partitioning Tree
Given a polygon p
Two lists of polygons:
those that are behind(p) :B
those that are infront(p) :F
If eye is infornt(p), right display order is B, p,
Otherwise it is F, p, B

B p F
p
B F
back front
Bf Bb
p
F
Bb Bf
B
B p F
p
B F
back front
Bf Bb
p
F
Bb Bf
B

Display a BSP Tree
struct bspnode { p: Polygon; back, front : *bspnode;
} BSPTree;
BSP_display ( bspt )BSPTree *bspt;{ if (!bspt) return;
if (EyeInfrontPoly( bspt->p )) { BSP_display(bspt->back);Poly_display(bspt->p); BSP_display(bspt->front);} else {
BSP_display(bspt->front); Poly_display(bspt->p);BSP_display(bspt->back);
}}

Generating a BSP Tree
if (polys is empty ) then return NULL;rootp := first polygon in polys;
for each polygon p in the rest of polys doif p is infront of rootp then
add p to the front listelse if p is in the back of rootp then
add p to the back listelse split p into a back poly pb and front poly pf add pf to the front list add pb to the back list
end_for;bspt->back := BSP_gentree(back list);bspt->front := BSP_gentree(front list);bspt->p = rootp;return bspt;

3
4, 5b1
23
4
5
a b
1 5a
3
1
23
4
5
a b
1 5a
3
1, 2, 5a 4, 5b1
23
4
5
a b
2
2
5b
4