research article onboard and real-time artificial...
TRANSCRIPT

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 530516 8 pageshttpdxdoiorg1011552013530516
Research ArticleOnboard and Real-Time Artificial Satellite Orbit DeterminationUsing GPS
Ana Paula Marins Chiaradia1 Heacutelio Koiti Kuga2
and Antonio Fernando Bertachini de Almeida Prado2
1 Grupo de Dinamica Orbital e Planetologia FEGUNESP 12 516-410 Guaratingueta SP Brazil2 Division of Space Mechanics and ControlmdashINPE Avenida dos Astronautas 1758 12 227-010 Sao Jose dos Campos SP Brazil
Correspondence should be addressed to Ana Paula Marins Chiaradia anachiaradiafegunespbr
Received 21 September 2012 Accepted 9 January 2013
Academic Editor Maria Zanardi
Copyright copy 2013 Ana Paula Marins Chiaradia et al This is an open access article distributed under the Creative CommonsAttribution License which permits unrestricted use distribution and reproduction in any medium provided the original work isproperly cited
An algorithm for real-time and onboard orbit determination applying the Extended Kalman Filter (EKF) method is developedAiming at a very simple and still fairly accurate orbit determination an analysis is performed to ascertain an adequacy of modelingcomplexity versus accuracy The minimum set of to-be-estimated states to reach the level of accuracy of tens of meters is foundto have at least the position velocity and user clock offset components The dynamical model is assessed through several testscovering force model numerical integration scheme and step size and simplified variational equations The measurement modelincludes only relevant effects to the order of meters The EKF method is chosen to be the simplest real-time estimation algorithmwith adequate tuning of its parameters In the developed procedure the obtained position and velocity errors along a day varyfrom 15 to 20m and from 0014 to 0018ms respectively with standard deviation from 6 to 10m and from 0006 to 0008msrespectively with the SA either on or offThe results as well as analysis of the final adopted models used are presented in this work
1 Introduction
The Global Positioning System (GPS) is a satellite navigationsystem that has been used to determine the position velocityand time with high accuracy of an artificial satellite suchas TOPEXPOSEIDON (TP) [1] Jason-1 Jason-2 CHAMPand GRACE satellites Current samples of satellites havingan onboard GPS receiver are Jason [2ndash4] GRACE [5 6]CHAMP [7 8] and KOMPSAT [9 10]
The TOPEXPOSEIDON (TP) mission is jointly con-ducted by the United States National Aeronautics and SpaceAdministration (NASA) and the French Space Agency Cen-tre National drsquoEtudes Spatiales (CNES) The main goal ofthis mission is to improve the knowledge of the globalocean circulation Other applications include the ocean tidesgeodesy and geodynamics ocean wave height and windspeed [1] The TP spacecraft orbits the Earth at an altitudeof 1336 km inclination of 66∘ and near-zero eccentricityThe period of the orbit is 187 hr The satellite orbit must bedetermined with an RMS radial accuracy of 13 cm This is an
extremely stringent accuracy requirement for a satellite of thisshape and altitude [11] The TP GPS receiver can track up to6 GPS satellites at once in both frequencies if antispoofing isinactive
Its successor Jason-1 continues the time series ofcentimeter-level ocean topography observations as it followson to the highly successful TOPEXPoseidon (TP) radaraltimeter satellite Jason has the same orbital parametersof TP satellite Preliminary tests of orbits computed usingJason-1 tracking data in a reduced dynamic strategy suggestthat the RMS radial accuracies are already better than 2 cmand that the 1 cm goal is within reach [2]
The GRACE (Gravity Recovery and Climate Experi-ment) satellites launched in March 2002 with about 470 kmin altitude are each equipped with a BlackJack GPSonboard receiver for precise orbit determination and gravityfield recovery [5] With primary objective of determiningthe Earthrsquos gravity field and its temporal variations withunprecedented accuracy accurate orbits for GRACE arerequired The orbit determination has been obtained with
2 Mathematical Problems in Engineering
accuracy better than 5 cm in each direction for GRACEorbits The relative accuracy of the two GRACE satellites isabout 1 cm in position and 10 micrometers per second invelocity
The CHAllenging Minisatellite Payload (CHAMP) is aGerman small satellite used for geophysical research andapplication This mission is scheduled to last five yearsin order to provide a sufficiently long observation timeto resolve long-term temporal variations primarily in themagnetic field in the gravity field andwithin the atmosphereCHAMP was launched on 15 July 2000 and reentered theEarthrsquos atmosphere on September 20 2010 [12] The positionaccuracy is about 08m for pseudorange in single frequency[13]
Two types of orbit determination are performed at theKOMPSAT using GPS data One is the operational orbitdetermination using GPS navigation solutions providingthe position accuracy around 445m RMS and the velocityaccuracy around0005msRMSTheother is the precise orbitdetermination using GPS raw measurement data by DGPStechnique In this case the difference between NASA GSFCPrecise Orbit Ephemeris and precise orbit determinationresults using TEC are radial 69 cm RMS along track 194 cmRMS and cross track 69 cm RMS [8]
Gomes et al [14] analyzed a real-time orbit estimatorusing the raw navigation solution provided by GPS receiversThe estimation algorithm considers a Kalman filter witha rather simple orbit dynamic model and random walkmodeling of the receiver clock bias and drift Using theTopexPoseidon satellite as test bed characteristics of modeltruncation sampling rates and degradation of the GPSreceiver (Selective Availability) were analyzed The positionprecision obtained was around 20ndash30m in 3D and around05ms in velocity
Pardal et al [15] determined the orbit of an artificialsatellite and analyzed its implications using least squaresalgorithms through sequential given rotations as the methodof estimation and data of the GPS receivers This approachhas the goal of improving the performance of the orbitestimation process and at the same time of minimizingthe computational procedure cost Perturbations due to highorder geopotential and direct solar radiation pressure and theposition of the GPS antenna on the satellite body were takeninto account
In this paper an algorithm to determine onboard thesatellite orbit in real-time using the GPS system and Kalmanfiltering is developed It used a simplified and compact modelwith low computational cost The extended Kalman filter(EKF) estimates the state vector composed of the positionand velocity components bias drift and drift rate of the GPSreceiver clock A simple fixed step-size-fourth order Runge-Kutta numerical integrator is found to be suitable to integratethe differential equations of the orbital motion The forcemodel in the equations of motion may consider the pertur-bations due to the geopotential up to any order and degree ofthe spherical harmonics The state error covariance matrix iscomputed through the transition matrix which is calculatedanalytically in an optimized way The raw single frequency
pseudorange GPS measurements are used as observationsby the Kalman filter They are modeled taking into accountmost of the GPS satellite and receiver clock offsets The mainaim is to develop a GPS-based real-time orbit determinationsystem for any artificial Earth satellite The target is orbitaccuracy in the order of tens of meters with simple modelingof the dynamics or measurement systems and still keepinglow requirements of speed and computational burden
2 Orbit Determination
The orbit determination process consists of obtaining valuesof the parameters that completely specify the motion ofan orbiting body like artificial satellites based on a set ofobservations of the body It involves nonlinear dynamicaland nonlinear measurement systems which depends onthe tracking system and estimation technique (eg Kalmanfiltering or least squares [16ndash21]) The dynamical systemmodel consists of orbital motion dynamics measurementsmodels Earthrsquos rotation effects and perturbation models AsMontenbruck and Gill [22] besides the state variables thatdefine the initial conditions thesemodels depend on a varietyof parameters that affects either the dynamical motion or themeasurement process Due to the complexity of the appliedmodels it is hardly possible to solve directly for any of theseparameters from a given set of observations
The observationmay be obtained from the ground stationnetworks using laser radar Doppler and so forth or by spacenavigation systems as the Global Positioning System (GPS)The choice of the tracking system depends on a compromisebetween the goals of the mission and the tools available
In the case of the GPS the advantages are global cov-erage high precision low cost and autonomous navigationresources The GPS may provide orbit determination withaccuracy at least as good as methods using ground-trackingnetworks The latter provides standard precision aroundhundredmeters and the former can provide precision as tightas some centimeters
The GPS provides at a given instant a set of manyredundant measurements which makes the orbit positionobservable geometrically
After some advances of technology the single frequencyGPS receivers provide a good basis to achieve fair precision atrelatively low cost still attaining the accuracy requirements ofthe mission
The GPS allows the receiver to determine its positionand time geometrically anywhere at any instant with datafrom at least four satellites The principle of navigation bysatellites is based in sending signals and data from the GPSsatellites to a receiver that is inside the satellite that needsto have its orbit determined This receiver measures thetravel time of the signal and then calculates the distancebetween the receiver and the GPS satellite If the clocksare synchronized measurements from three GPS satellitesare enough to obtain its position If the clocks are notsynchronized four measurements are required Those mea-surements of distances are called pseudorange as shown inFigure 1
Mathematical Problems in Engineering 3
119883
119885
119884
Pseudorange
119903GPS
119903119906
Figure 1 Orbit determination using GPS
3 Description of the Algorithm
The algorithm is developed to determine artificial satelliteorbits according the dynamical model (the force model)The method is used to integrate the differential equationsof a satellite motion the computation of the state transitionmatrix the measurement model and the estimation tech-nique
For that sake the following aspects are verified
(a) concerning the dynamical model what is better orderand degree truncation of the spherical harmoniccoefficients of the JGM-2 model in order to reach theobjectives in terms of low computational cost relativeaccuracy (tens of meters) and the lowest possibleorder and degree of the harmonical coefficients
(b) concerning the integration method with step size ofthe fixed step RK4 integrator to use considering lowcomputational cost accuracy and the selection ofappropriate reference systems and transformations
(c) considering the measurement model where the errorssource is included in the model and
(d) considering the filtering the EKF is used and the useof the simplified transition matrix considering eitherthe pure Keplerian motion or including at least the 119869
2
effects
31 Force Model and Numerical Integration The main forcesacting on an artificial satellite may be classified as grav-itational (eg geopotential third-body perturbations andtides) and nongravitational forces (eg atmospheric dragsolar radiation pressure) These forces are rather difficult tomodel so a mathematically inaccurate model of the motion
with respect to true motion is sometimes adopted in Kuga[23 24]
To choose a simplified force model to be adopted in thiswork the following factors are considered generality orbitaccuracy and computational cost for orbit determination ina real-time and onboard environment Therefore only forcesdue to the Earth gravitational field should be implemented
The considered harmonic coefficients of the Earth geopo-tential field are set up to order and degree 10 of JGM-2model according to studies developed inChiaradia et al [25]without overloading the processing time
The acceleration and the related partial derivatives matri-ces are computed through the recurrence relations accordingto Pines [26] in Earth-fixed (EF) coordinatesThe coordinatetransformation from True of Date (ToD) to Pseudo-Earthfixed equator and prime meridian (PEF) takes into accountthe Earth sidereal rotation but the polar motion is neglectedin this work
The integration of the satellite motion equation is carriedout using the simple 4th order of the Runge-Kutta (RK4)algorithm It is implemented without any mechanism of stepadjustment or error control The RK4 is considered an ade-quate numerical integrator due to its simplicity fair accuracylow truncation error and low computational burden Aninitialization procedure is not necessary and the step size isquite easy to change The 30-second integration step intervalis used
32 Measurement Model With the advances of technologythe single frequency GPS receivers provide a good basis toachieve fair precision at a relatively low cost still attaining theaccuracy requirements of general missions In this way onlythe code pseudorange in L1 frequency is used to determinethe satellite orbit providing the accuracy required by themission similar to the one shown in this work
The errors considered in the CA code pseudorangemeasurements are the GPS satellite and receiver clock offsetsChiaradia et al [25 27] studied the need of considering theionospheric correction model It has been concluded thatthe ionospheric effect (around 3ndash6 meters) does not affectsignificantly the final accuracy of the orbit In this way it willbe neglected once the goal is not to achieve high precision(around centimeters) In high precision and onboard appli-cations some ionospheric correction for single frequencyshould be applied but this may add some complexity if weneed to implement a better ionospheric model
The equation of the CA code pseudorange in L1 fre-quency is given by
120588119888= 120588 + 119888 [Δ119905GPS (119905) minus Δ119905119906 (119905)] (1)
where 120588119888is the CA code pseudorange in L1 119888 is the speed of
light Δ119905GPS is the GPS satellite clock offset Δ119905119906 is the receiverclock offset 119905 is the observation instant in GPS time and 120588 isthe geometric range given by
120588 = radic(119909GPS minus 119909)2
+ (119910GPS minus 119910)2
+ (119911GPS minus 119911)2
(2)
where 119909 119910 and 119911 are the positional states of the user satelliteat reception time (in GPS time) and 119909GPS 119910GPS and 119911GPS are
4 Mathematical Problems in Engineering
the positional states of the GPS satellite at transmission time(in GPS time) corrected for light time delay
The second term on the right side of (1) is the clock biasthat represents the combined clock offsets of the satellite andof the receiver with respect to GPS time Each GPS satellitecontributes with one clock bias The information for GPSsatellite clocks is known and transmitted via a navigationmessage in the form of three polynomial coefficients with areference time 119905oc The clock correction of the GPS satellitefor epoch 119905 is
119905 = 119905GPS minus Δ119905GPS (3)
Δ119905GPS = 1198861198910 + 1198861198911 (119905 minus 119905oc) + 1198861198912(119905 minus 119905oc)2
+ 120575GPS119877
(4)
120575GPS119877
=2
1198882radic119886120583 119890 sin119864 (5)
where 119905GPS is the spacecraft code phase time at messagetransmission time in seconds 119886
1198910 1198861198911 and 119886
1198912are bias
drift and drift rate of GPS satellite clock respectively 119905ocis the reference time in seconds measured from the GPStime weekly epoch 120575
119877is a small relativistic correction of
the GPS satellite clock caused by orbital eccentricity 119890 119886 isthe semimajor axis of the orbit 120583 is the Earth gravitationalconstant and 119864 is the eccentric anomaly
The relativistic effect is included in the clock polynomialbroadcast via navigationmessage If amore accurate equationis required the relativistic effectsmust be subtracted from theclock polynomial coefficientsThe polynomial coefficient 119886
1198910
1198861198911 and 119886
1198912are transmitted in units of sec nondimensional
and 1sec respectivelyThe clock data reference time 119905oc is alsobroadcastedThevalue of 119905GPS must account for the beginningor the end-of-week crossoversTheusermay approximate 119905 by119905GPS in (3)
The user clock offset is part of the estimated state vectorgiven by [28]
119888Δ119905119906= 1198870+ 1198871Δ119879 + 119887
2Δ1198792
+ 120575USER119877
(6)
where 1198870 1198871 and 119887
2are the bias drift and drift rate of the
user clock and Δ119879 is the elapsed time since the instant of thefirst measurement The relativistic effect in the user clock iscalculated by using the best available estimated state vectorin the epoch
33 GPS Travel and Reception Times The computation ofgeometric range 120588 is required for both pseudorange andcarrier phase processing The GPS position coordinates areused at the instant of emissionHowever the reception time isused to compute itThen this time is corrected by subtractingthe signal travel time to obtain the emission time Thereforethe travel time is computed through an iterative process thatstarts assuming an average value for travel time 120591 Nextthe GPS position for the epoch (119905 minus 120591) is interpolated andthen the geometric range is computed which can be used toreconstruct the travel time by [29]
120591 =120588
119888 (7)
The light-time iteration is usually performed in an inertialsystem with position vector r = (119909 119910 119911) and the GPS satelliteposition vector rGPS = (119909GPS 119910GPS 119911GPS)Then the positionsfrom inertial to the Earth-fixed WGS84 system or vice versaare transformed So the signal path is given as [22]
120588 = RWGS(119905) (rGPS (119905 minus 120591) minus r (119905)) (8)
whereRWGS is the rotationmatrix from inertial to Earth-fixedWGS-84 system Making use of the approximation
RWGS(119905) asymp R
119911(120596119890120591)RWGS
(119905 minus 120591) (9)
where 120596119890is the Earth rotation rate the inertial position of the
GPS satellite may be substituted by the corresponding Earth-fixed position
rWGSGPS (119905 minus 120591) = RWGS
(119905 minus 120591) rGPS (119905 minus 120591) (10)
This yields in the Earth-fixed reference frame
120588 = 119888120591 =10038161003816100381610038161003816R119911(120596119890120591) rGPS (119905 minus 120591) minus rWGS
(119905)10038161003816100381610038161003816 (11)
If the discrepancy between the first and second approxima-tion of 120591 is greater than a specified criterion the iteration isrepeated that is a new satellite position is interpolated anda new distance is computed and so on Generally a couple ofiterations are sufficient
This computation is not affected by the receiver clockerror Δ119905
119906and the satellite clock error Δ119905
119904119907 However the
ionosphere troposphere hardware andmultipath corrupt thecomputed nominal emission time All of these effects areneglected in the present context The same process correctsthe reception time as well
34 Estimation Technique The standard Kalman filter algo-rithm is used to estimate the spacecraft orbit onboard Thisfilter is robust with easy implementation for applicationsin real-time and no requirement of iterating the previouslycollected data and is able to provide the current orbit inreal-time The Extended Kalman Filter (EKF) is a versionwhich is applicable to nonlinear problems and it is composedof time-update and measurement-update cycles The time-update phase updates the state and the covariance matrixalong the time using dynamical equations In this work theestimated state vector is given by
x = (r v b)119879 (12)
where r = (119909 119910 119911)119879 and v = ( 119910 )
119879 are the spacecraftrsquosposition and velocity vectors b = (119887
0 1198871 1198872)119879 where 119887
0 1198871
and 1198872are bias drift and drift rate of the receiver clock
respectively and 119905 is the instant of integration All coordinatesrefer to ToD system
The algorithm used can be found in references [18 19]The details of how it is implemented here can be found inreference [30]
The state error covariance matrix is propagated throughthe transition matrix The conventional filter is implemented
Mathematical Problems in Engineering 5
0001
001
01
1
10
100
0 2 4 6 8 10 12 14 16 18 20 22 24
Estimated position error
Estimated velocity error (MS)
Hours (UTC)
(M)
(M)Real position error
Real velocity error (MS)
Figure 2 Estimated and real error with SA off
0001
001
01
1
10
100
0 2 4 6 8 10 12 14 16 18 20 22 24Hours (UTC)
Estimated position error (M)
Real position error (M)
Estimated velocity error (MS)
Real velocity error (MS)
Figure 3 Estimated and real error with SA on
10
30
50
70
90
0 2 4 6 8 10 12 14 16 18 20 22 24Hours (UTC)
Resid
ual (
M)
minus90
minus70
minus50
minus30
minus10
Figure 4 Typical behavior of the residuals
by calculating only the upper triangular part of the state errorcovariancematrixThe other elements are obtained imposingsymmetry to the matrix The lack of symmetry is one of thehighest sources of truncation error per Kalman filter cycle[31]
One method to avoid the problem of high computationalcost and extended analytical expressions of the transitionmatrix consists of propagating the state vector using thecomplete force model and then computing the transitionmatrix using a simplified force model The analytical calcu-lation of the transition matrix of the Keplerian motion is areasonable approximation when only short time intervals ofthe observations and reference instant are involved [31] On
the other hand the inclusion of 1198692(Earth flattening) effect in
the transition matrix can approximately be done by adoptingthe Markleyrsquos method [32]
Chiaradia et al [33] studied these two methods Thefirst method is an approximation of the Keplerian motionproviding an analytical solution which is then calculatednumerically by solving the Keplerrsquos equationThe second oneis a local numerical approximation that includes the effectof 1198692 They were evaluated according to accuracy processing
time and handling complexity of the equations for two kindsof orbits It has been concluded that the Keplerian motionmodel which was developed by Kuga [31] is still a bettersuited force model to be adopted in the evaluation of ageneral-purpose state transition matrix Some other papersstudying similar or related topics can be found in references[34ndash36]
4 Simulations
To validate and to analyze the algorithm the TopexPoseidon(TP) satellite data is used This satellite carries a dualfrequency receiver GPS onboard to experimentally test theability of the GPS to provide Precise Orbit Determination(POD) The following files are used
(i) the TP observation files that broadcast the code andcarrier pseudorange measurements in two frequen-cies in 10-second GPS time steps and are provided bythe GPSData Processing Facility of the Jet PropulsionLaboratory (JPL) in RINEX format
(ii) the TP Precise Orbit Ephemeris (POE) files that aregenerated by JPL and
(iii) the broadcast GPS navigation message file in RINEXformat provided by Crystal Dynamics Data Informa-tion System (CDDIS) of the Goddard Space FlightCenter (GSFC)
The estimated position and velocity are compared againstthe TP-POE It is claimed to estimate the TP position withaccuracy which is better than 15 cmThe states in the POE areprovided in one minute UTC time steps in ToD system TheTP GPS measurements are provided in 10 seconds of GPStime According to IERS the difference between theUTC andGPS times is approximately an integer number of secondsincreasing timely with the introduction of leap seconds Forexample the difference is 9 seconds for 1993
However in the process of orbit determination thestate is estimated in 30-second intervals in UTC time withtransmission and reception time corrections Then thesedata instants are not coincident Therefore the states areinterpolated through an interpolation (Polint) subroutine[37] With this approach the mean error of the interpolatedstates is 0068m and 25 times 10minus4ms for position and velocityrespectively which does not add any significant bias to theaccuracy evaluation of the results
6 Mathematical Problems in Engineering
0
500
1000
1500
2000
2500
3000
3500
10 30 50 70 90 MaisResidual (M)minus10minus80 minus50 minus30minus100
Figure 5 Histogram of the residuals
00002000400060008001
0012001400160018
002
0 20 40 60 80 100minus20minus80 minus60 minus40minus100Standard deviation of the residuals (M)
Figure 6 Normal distribution of the residuals
Some parameters to be used in evaluating the algorithmin the tests are defined The real position error is given by
Δr equiv [3
sum
119894=1
(119909119894minus 119909119894)2
]
12
(13)
where 119909119894and 119909
119894 119894 = 1 2 3 are the reference components
(or real) and estimated position vectors respectively Theestimated position error is given by
Δr = [3
sum
119894=1
P119894119894]
12
(14)
where P119894119894 119894 = 1 2 3 represents the values of the diagonal
elements of the state covariance matrix of the estimatedposition The real velocity error is given by
Δv equiv [6
sum
119894=4
(119909119894minus 119909119894)2
]
12
(15)
where 119909119894and 119909
119894 119894 = 4 5 6 are the components of the refer-
ence (or real) and estimated velocity vectors respectivelyTheestimated velocity error is given by
Δv = [6
sum
119894=4
P119894119894]
12
(16)
Table 1 Statistical errors with SA on or off
Date Δ119903 (m) Δ119907 (m) Residuals (m)11181993 155 plusmn 68 0014 plusmn 0006 0027 plusmn 132
11191993 174 plusmn 67 0016 plusmn 0006 minus0130 plusmn 134
11201993 176 plusmn 84 0017 plusmn 0007 minus0160 plusmn 226
01031994 165 plusmn 85 0015 plusmn 0008 0004 plusmn 221
01041994 195 plusmn 96 0018 plusmn 0009 minus0160 plusmn 228
01051994 196 plusmn 78 0018 plusmn 0008 0040 plusmn 229
01211994 190 plusmn 77 0018 plusmn 0008 minus0050 plusmn 239
01221994 165 plusmn 86 0015 plusmn 0008 minus0007 plusmn 233
where P119894119894 119894 = 4 5 6 represents the values of the diagonal
elements of the state covariance matrix of the estimatedvelocity And the residual is given by
Δ120588 = z minus 120588119888
(17)
where z and 120588119888
are the observed and calculated pseudorangemeasurements respectively
5 Results
The algorithm is analyzed and tested using 8 complete days ofdata Figures 2 and 3 show the real and filtered position andvelocity errors in m and ms with SA (Select Availability) offand on respectively These figures show the results for oneday of filtering
Figure 4 shows the typical behavior of the pseudorangeresiduals for all tests
Figures 5 and 6 show the histogram and normal distribu-tion of the residuals
Table 1 shows the statistical error for position and velocityvectors and the residual for all tests
It can be noted that for all days tested the real positionand velocity errors are fewer than with the estimated positionand velocity errors by the filter It shows the conservativebehavior of the filter In all cases the filtering takes aroundone hour to converge Before achieving the convergencethe onboard computer can use the GPS navigation solutionprovided by GPS receiver with 100-meter position error Theposition accuracy with the SA off (11181993 and 11191993)or on (other days) is from 15 to 20m with standard deviationfrom 6 to 10m The velocity accuracy varies from 0014to 0018ms with standard deviation going from 0006 to0009ms as shown in Table 1
Through Figures 5 and 6 and Table 1 it can be notedthat the residuals present normal distributionwithmean zeroand standard deviation of around 23m On November 18and 19 1993 the SA is off and the standard deviation of theresiduals is around 133mThis fact shows how the SA affectsthe statistics of the residuals although the estimated state hadnot been significantly degraded
6 Conclusions
The main goal of this work is to achieve accuracy aroundtens ofmeters alongwithminimumcomputational cost when
Mathematical Problems in Engineering 7
determining in real-time artificial satellite orbits onboardconsidering a simplified model For its development singlefrequency GPS measurements are used considering theeffects of the clock offsets of the GPS and user satellites anduser relativistic effects
This algorithm is tested with real data from a satellite witha GPS receiver onboard The satellite orbit is estimated usingthe developed algorithmwith a good accuracy andminimumcomputational costThe algorithmuses a large 30-second stepsize of propagation (10 seconds step size can be used as well)the geopotential model up to order and degree 10 and thecomputationmethod of the transitionmatrix considering theKeplerian motion The position accuracy obtained is betterthan 20m with the SA on or off The results are according toexpected
Acknowledgments
The authors wish to express their appreciation for the supportprovided by UNESP (Universidade Estadual Paulista ldquoJuliode Mesquita Filhordquo) of Brazil and INPE (Brazilian Institutefor Space Research) They also wish to acknowledge theEnglish language review performed by FDCTndashFoundationfor Scientific and Technological Development
References
[1] L L Fu E J Christensen C A Yamarone Jr et al ldquoTOPEXPOSEIDONmission overviewrdquo Journal of Geophysical Researchvol 99 no 12 pp 24369ndash24381 1994
[2] B Haines W Bertiger S Desai et al ldquoInitial orbit determi-nation results for Jason-1 towards a 1-cm orbitrdquo in Proceedingsof the Institute of Navigation Conference (GPS rsquo02) PortlandOregon USA September 2002
[3] K R Choi J C Ries and B D Tapley ldquoJASON-1 precisionorbit determination by combining SLR and DORIS with GPStracking datardquo Marine Geodesy vol 27 no 1-2 pp 319ndash3312004
[4] S B LuthckeN P ZelenskyDD Rowlands F G Lemoine andT A Williams ldquoThe 1-centimeter orbit Jason-1 precision orbitdetermination using GPS SLR DORIS and altimeter datardquoMarine Geodesy vol 26 no 3-4 pp 399ndash421 2003
[5] Z Kang P Nagel and R Pastor ldquoPrecise orbit determinationfor GRACErdquoAdvances in Space Research vol 31 no 8 pp 1875ndash1881 2003
[6] Z Kang B Tapley S Bettadpur J Ries P Nagel and R PastorldquoPrecise orbit determination for the GRACEmission using onlyGPS datardquo Journal of Geodesy vol 80 no 6 pp 322ndash331 2006
[7] D Kuang Y Bar-Sever W Bertiger et al ldquoPrecision orbitdetermination for CHAMP using GPS data from BlackJackreceiverrdquo in Proceeding of the ION National Technical MeetingLong Beach Calif USA January 2001
[8] S Zhu C Reigber and R Koenig ldquoIntegrated adjustment ofCHAMP GRACE and GPS datardquo Journal of Geodesy vol 78no 1-2 pp 103ndash108 2004
[9] B S Lee J S Lee J H Kim et al ldquoReconstruction ofKOMPSAT-1 GPS navigation solutions using GPS data gener-ation and preprocessing programrdquo Acta Astronautica vol 54no 8 pp 571ndash576 2004
[10] B S Lee J C Yoon Y Hwang and J Kim ldquoOrbit determinationsystem for the KOMPSAT-2 using GPS measurement datardquoActa Astronautica vol 57 no 9 pp 747ndash753 2005
[11] B H Putney J A Marshall R S Nerem et al ldquoPrecise orbitdetermination for the TopexPoseidon missionrdquo in Proceed-ings of the AASAIAA Astrodynamics Conference pp 195ndash212August 1993
[12] C Noll International Laser Ranging Service 2012 httpilrsgsfcnasagovsatellite missionslist of satellitescham generalhtml
[13] E Gill and O Montebruck ldquoComparision of GPS-based orbitdetermination strategiesrdquo in Proceedings of the 18th Interna-tional Symposium on Space Flight Dynamics Munich GermanyOctober 2004
[14] V M Gomes H H Kuga and A P M Chiaradia ldquoReal timeorbit determination using GPS navigation solutionrdquo Journal ofthe Brazilian Society ofMechanical Sciences and Engineering vol29 no 3 pp 274ndash278 2007
[15] P C PM PardalHKKuga andRV deMoraes ldquoImplicationsof the application of recursive least squares algorithms tosatellite orbit determination usingGPSmeasurementsrdquoWSEASTransactions on Systems vol 8 no 3 pp 334ndash343 2009
[16] G J Bierman and C L Thornton ldquoNumerical comparisonof Kalman filter algorithms orbit determination case studyrdquoAutomatica vol 13 no 1 pp 23ndash35 1977
[17] R G Brown and P Y C Hwang ldquoA kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[18] A Gelb J F Kasper Jr R A Nash Jr C F Price and AA Sutherland Jr Applied Optimal Estimation The MIT PressInglaterra UK 1974
[19] P S Maybeck Stochastic Models Estimation and Control vol 1Academic Press New York NY USA 1979
[20] J R Raol and N K Sinha ldquoOn the orbit determination prob-lemrdquo IEEE Transactions on Aerospace and Electronic Systemsvol 21 no 3 pp 274ndash291 1985
[21] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications vol 2 chapter 21 pp p559ndashp592AIAA 1996
[22] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer New York NY USA 2001
[23] H K Kuga Adaptive estimation of orbits applied to low altitudesatellites [MS thesis] INPE Sao Jose dos Campos Brazil 1982INPE-2316-TDL079 in Portuguese
[24] H K Kuga Orbit determination of Earth artificial satellitesthrough state estimation techniques combined with smoothingtechniques [PhD dissertation] INPE Sao Jose dos CamposBrazil 1989 INPE-4959-TDL079 in Portuguese
[25] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[26] S Pines ldquoUniform representation of the gravitational potentialand its derivativesrdquo AIAA Journal vol 11 no 11 pp 1508ndash15111973
[27] A P M Chiaradia H K Kuga and A F B A Prado ldquoInves-tigation on ionospheric correction models for GPS signalsrdquo inAdvances in Space Dynamics A F B A Prado Ed pp 214ndash219Instituto Nacional de Pesquisas Espaciais 2000
[28] A P M Chiaradia E Gill O Montenbruck H K Kuga andA F B A Prado Algorithms for on-Board Orbit Determination
8 Mathematical Problems in Engineering
Using GPSmdashOBODE-GPS DLR Alemanha Germany 2000DLRmdashGSOC TN 00-04
[29] A Leick GPS Satellite Surveying INC John Wiley amp Sons 2ndedition 1995
[30] A P M Chiaradia H K Kuga and A F B A Prado ldquoInvesti-gation of simplifiedmodels for orbit determination using singlefrequency GPS measurementsrdquo Journal of the Brazilian Societyof Mechanical Sciences vol 21 pp 165ndash172 1999
[31] H K Kuga TransitionMatrix of the Elliptical KeplerianMotionINPE Sao Jose dos Campos Brazil 1986 INPE-3779-NTE250in Portuguese
[32] F L Markley ldquoApproximate cartesian state transition matrixrdquoThe Journal of the Astronautical Sciences vol 34 no 12 pp 161ndash169 1986
[33] A P M Chiaradia H K Kuga and A F B A Prado ldquoCom-parison between twomethods to calculate the transitionmatrixof orbit motionrdquo Mathematical Problems in Engineering vol2012 Article ID 768973 12 pages 2012
[34] VM Gomes H K Kuga and A F B A Prado ldquoReal time orbitdetermination with different force fieldsrdquoWSEAS Transactionson Applied and Theoretical Mechanics vol 5 no 1 pp 23ndash322010
[35] V M Gomes A F B A Prado and H K Kuga ldquoLowthrust maneuvers for artificial satellitesrdquo WSEAS Transactionson Applied and Theoretical Mechanics vol 3 no 10 pp 859ndash868 2008
[36] V M Gomes Prado A F B A and H K Kuga ldquoFiltering theGPS navigation solution for real time orbit determination usingdifferent dynamical modelsrdquo in Proceedings of the 5th WSEASInternational Conference on Applied and Theoretical Mechanics(MECHANICS rsquo09) vol 1 pp 1ndash10 Puerto de La Cruz Spain2009
[37] HW Press B P Flannery S A Teukolsky andW T VetterlingNumerical Recipesedition Cambridge University Press 3rdedition 1987
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
accuracy better than 5 cm in each direction for GRACEorbits The relative accuracy of the two GRACE satellites isabout 1 cm in position and 10 micrometers per second invelocity
The CHAllenging Minisatellite Payload (CHAMP) is aGerman small satellite used for geophysical research andapplication This mission is scheduled to last five yearsin order to provide a sufficiently long observation timeto resolve long-term temporal variations primarily in themagnetic field in the gravity field andwithin the atmosphereCHAMP was launched on 15 July 2000 and reentered theEarthrsquos atmosphere on September 20 2010 [12] The positionaccuracy is about 08m for pseudorange in single frequency[13]
Two types of orbit determination are performed at theKOMPSAT using GPS data One is the operational orbitdetermination using GPS navigation solutions providingthe position accuracy around 445m RMS and the velocityaccuracy around0005msRMSTheother is the precise orbitdetermination using GPS raw measurement data by DGPStechnique In this case the difference between NASA GSFCPrecise Orbit Ephemeris and precise orbit determinationresults using TEC are radial 69 cm RMS along track 194 cmRMS and cross track 69 cm RMS [8]
Gomes et al [14] analyzed a real-time orbit estimatorusing the raw navigation solution provided by GPS receiversThe estimation algorithm considers a Kalman filter witha rather simple orbit dynamic model and random walkmodeling of the receiver clock bias and drift Using theTopexPoseidon satellite as test bed characteristics of modeltruncation sampling rates and degradation of the GPSreceiver (Selective Availability) were analyzed The positionprecision obtained was around 20ndash30m in 3D and around05ms in velocity
Pardal et al [15] determined the orbit of an artificialsatellite and analyzed its implications using least squaresalgorithms through sequential given rotations as the methodof estimation and data of the GPS receivers This approachhas the goal of improving the performance of the orbitestimation process and at the same time of minimizingthe computational procedure cost Perturbations due to highorder geopotential and direct solar radiation pressure and theposition of the GPS antenna on the satellite body were takeninto account
In this paper an algorithm to determine onboard thesatellite orbit in real-time using the GPS system and Kalmanfiltering is developed It used a simplified and compact modelwith low computational cost The extended Kalman filter(EKF) estimates the state vector composed of the positionand velocity components bias drift and drift rate of the GPSreceiver clock A simple fixed step-size-fourth order Runge-Kutta numerical integrator is found to be suitable to integratethe differential equations of the orbital motion The forcemodel in the equations of motion may consider the pertur-bations due to the geopotential up to any order and degree ofthe spherical harmonics The state error covariance matrix iscomputed through the transition matrix which is calculatedanalytically in an optimized way The raw single frequency
pseudorange GPS measurements are used as observationsby the Kalman filter They are modeled taking into accountmost of the GPS satellite and receiver clock offsets The mainaim is to develop a GPS-based real-time orbit determinationsystem for any artificial Earth satellite The target is orbitaccuracy in the order of tens of meters with simple modelingof the dynamics or measurement systems and still keepinglow requirements of speed and computational burden
2 Orbit Determination
The orbit determination process consists of obtaining valuesof the parameters that completely specify the motion ofan orbiting body like artificial satellites based on a set ofobservations of the body It involves nonlinear dynamicaland nonlinear measurement systems which depends onthe tracking system and estimation technique (eg Kalmanfiltering or least squares [16ndash21]) The dynamical systemmodel consists of orbital motion dynamics measurementsmodels Earthrsquos rotation effects and perturbation models AsMontenbruck and Gill [22] besides the state variables thatdefine the initial conditions thesemodels depend on a varietyof parameters that affects either the dynamical motion or themeasurement process Due to the complexity of the appliedmodels it is hardly possible to solve directly for any of theseparameters from a given set of observations
The observationmay be obtained from the ground stationnetworks using laser radar Doppler and so forth or by spacenavigation systems as the Global Positioning System (GPS)The choice of the tracking system depends on a compromisebetween the goals of the mission and the tools available
In the case of the GPS the advantages are global cov-erage high precision low cost and autonomous navigationresources The GPS may provide orbit determination withaccuracy at least as good as methods using ground-trackingnetworks The latter provides standard precision aroundhundredmeters and the former can provide precision as tightas some centimeters
The GPS provides at a given instant a set of manyredundant measurements which makes the orbit positionobservable geometrically
After some advances of technology the single frequencyGPS receivers provide a good basis to achieve fair precision atrelatively low cost still attaining the accuracy requirements ofthe mission
The GPS allows the receiver to determine its positionand time geometrically anywhere at any instant with datafrom at least four satellites The principle of navigation bysatellites is based in sending signals and data from the GPSsatellites to a receiver that is inside the satellite that needsto have its orbit determined This receiver measures thetravel time of the signal and then calculates the distancebetween the receiver and the GPS satellite If the clocksare synchronized measurements from three GPS satellitesare enough to obtain its position If the clocks are notsynchronized four measurements are required Those mea-surements of distances are called pseudorange as shown inFigure 1
Mathematical Problems in Engineering 3
119883
119885
119884
Pseudorange
119903GPS
119903119906
Figure 1 Orbit determination using GPS
3 Description of the Algorithm
The algorithm is developed to determine artificial satelliteorbits according the dynamical model (the force model)The method is used to integrate the differential equationsof a satellite motion the computation of the state transitionmatrix the measurement model and the estimation tech-nique
For that sake the following aspects are verified
(a) concerning the dynamical model what is better orderand degree truncation of the spherical harmoniccoefficients of the JGM-2 model in order to reach theobjectives in terms of low computational cost relativeaccuracy (tens of meters) and the lowest possibleorder and degree of the harmonical coefficients
(b) concerning the integration method with step size ofthe fixed step RK4 integrator to use considering lowcomputational cost accuracy and the selection ofappropriate reference systems and transformations
(c) considering the measurement model where the errorssource is included in the model and
(d) considering the filtering the EKF is used and the useof the simplified transition matrix considering eitherthe pure Keplerian motion or including at least the 119869
2
effects
31 Force Model and Numerical Integration The main forcesacting on an artificial satellite may be classified as grav-itational (eg geopotential third-body perturbations andtides) and nongravitational forces (eg atmospheric dragsolar radiation pressure) These forces are rather difficult tomodel so a mathematically inaccurate model of the motion
with respect to true motion is sometimes adopted in Kuga[23 24]
To choose a simplified force model to be adopted in thiswork the following factors are considered generality orbitaccuracy and computational cost for orbit determination ina real-time and onboard environment Therefore only forcesdue to the Earth gravitational field should be implemented
The considered harmonic coefficients of the Earth geopo-tential field are set up to order and degree 10 of JGM-2model according to studies developed inChiaradia et al [25]without overloading the processing time
The acceleration and the related partial derivatives matri-ces are computed through the recurrence relations accordingto Pines [26] in Earth-fixed (EF) coordinatesThe coordinatetransformation from True of Date (ToD) to Pseudo-Earthfixed equator and prime meridian (PEF) takes into accountthe Earth sidereal rotation but the polar motion is neglectedin this work
The integration of the satellite motion equation is carriedout using the simple 4th order of the Runge-Kutta (RK4)algorithm It is implemented without any mechanism of stepadjustment or error control The RK4 is considered an ade-quate numerical integrator due to its simplicity fair accuracylow truncation error and low computational burden Aninitialization procedure is not necessary and the step size isquite easy to change The 30-second integration step intervalis used
32 Measurement Model With the advances of technologythe single frequency GPS receivers provide a good basis toachieve fair precision at a relatively low cost still attaining theaccuracy requirements of general missions In this way onlythe code pseudorange in L1 frequency is used to determinethe satellite orbit providing the accuracy required by themission similar to the one shown in this work
The errors considered in the CA code pseudorangemeasurements are the GPS satellite and receiver clock offsetsChiaradia et al [25 27] studied the need of considering theionospheric correction model It has been concluded thatthe ionospheric effect (around 3ndash6 meters) does not affectsignificantly the final accuracy of the orbit In this way it willbe neglected once the goal is not to achieve high precision(around centimeters) In high precision and onboard appli-cations some ionospheric correction for single frequencyshould be applied but this may add some complexity if weneed to implement a better ionospheric model
The equation of the CA code pseudorange in L1 fre-quency is given by
120588119888= 120588 + 119888 [Δ119905GPS (119905) minus Δ119905119906 (119905)] (1)
where 120588119888is the CA code pseudorange in L1 119888 is the speed of
light Δ119905GPS is the GPS satellite clock offset Δ119905119906 is the receiverclock offset 119905 is the observation instant in GPS time and 120588 isthe geometric range given by
120588 = radic(119909GPS minus 119909)2
+ (119910GPS minus 119910)2
+ (119911GPS minus 119911)2
(2)
where 119909 119910 and 119911 are the positional states of the user satelliteat reception time (in GPS time) and 119909GPS 119910GPS and 119911GPS are
4 Mathematical Problems in Engineering
the positional states of the GPS satellite at transmission time(in GPS time) corrected for light time delay
The second term on the right side of (1) is the clock biasthat represents the combined clock offsets of the satellite andof the receiver with respect to GPS time Each GPS satellitecontributes with one clock bias The information for GPSsatellite clocks is known and transmitted via a navigationmessage in the form of three polynomial coefficients with areference time 119905oc The clock correction of the GPS satellitefor epoch 119905 is
119905 = 119905GPS minus Δ119905GPS (3)
Δ119905GPS = 1198861198910 + 1198861198911 (119905 minus 119905oc) + 1198861198912(119905 minus 119905oc)2
+ 120575GPS119877
(4)
120575GPS119877
=2
1198882radic119886120583 119890 sin119864 (5)
where 119905GPS is the spacecraft code phase time at messagetransmission time in seconds 119886
1198910 1198861198911 and 119886
1198912are bias
drift and drift rate of GPS satellite clock respectively 119905ocis the reference time in seconds measured from the GPStime weekly epoch 120575
119877is a small relativistic correction of
the GPS satellite clock caused by orbital eccentricity 119890 119886 isthe semimajor axis of the orbit 120583 is the Earth gravitationalconstant and 119864 is the eccentric anomaly
The relativistic effect is included in the clock polynomialbroadcast via navigationmessage If amore accurate equationis required the relativistic effectsmust be subtracted from theclock polynomial coefficientsThe polynomial coefficient 119886
1198910
1198861198911 and 119886
1198912are transmitted in units of sec nondimensional
and 1sec respectivelyThe clock data reference time 119905oc is alsobroadcastedThevalue of 119905GPS must account for the beginningor the end-of-week crossoversTheusermay approximate 119905 by119905GPS in (3)
The user clock offset is part of the estimated state vectorgiven by [28]
119888Δ119905119906= 1198870+ 1198871Δ119879 + 119887
2Δ1198792
+ 120575USER119877
(6)
where 1198870 1198871 and 119887
2are the bias drift and drift rate of the
user clock and Δ119879 is the elapsed time since the instant of thefirst measurement The relativistic effect in the user clock iscalculated by using the best available estimated state vectorin the epoch
33 GPS Travel and Reception Times The computation ofgeometric range 120588 is required for both pseudorange andcarrier phase processing The GPS position coordinates areused at the instant of emissionHowever the reception time isused to compute itThen this time is corrected by subtractingthe signal travel time to obtain the emission time Thereforethe travel time is computed through an iterative process thatstarts assuming an average value for travel time 120591 Nextthe GPS position for the epoch (119905 minus 120591) is interpolated andthen the geometric range is computed which can be used toreconstruct the travel time by [29]
120591 =120588
119888 (7)
The light-time iteration is usually performed in an inertialsystem with position vector r = (119909 119910 119911) and the GPS satelliteposition vector rGPS = (119909GPS 119910GPS 119911GPS)Then the positionsfrom inertial to the Earth-fixed WGS84 system or vice versaare transformed So the signal path is given as [22]
120588 = RWGS(119905) (rGPS (119905 minus 120591) minus r (119905)) (8)
whereRWGS is the rotationmatrix from inertial to Earth-fixedWGS-84 system Making use of the approximation
RWGS(119905) asymp R
119911(120596119890120591)RWGS
(119905 minus 120591) (9)
where 120596119890is the Earth rotation rate the inertial position of the
GPS satellite may be substituted by the corresponding Earth-fixed position
rWGSGPS (119905 minus 120591) = RWGS
(119905 minus 120591) rGPS (119905 minus 120591) (10)
This yields in the Earth-fixed reference frame
120588 = 119888120591 =10038161003816100381610038161003816R119911(120596119890120591) rGPS (119905 minus 120591) minus rWGS
(119905)10038161003816100381610038161003816 (11)
If the discrepancy between the first and second approxima-tion of 120591 is greater than a specified criterion the iteration isrepeated that is a new satellite position is interpolated anda new distance is computed and so on Generally a couple ofiterations are sufficient
This computation is not affected by the receiver clockerror Δ119905
119906and the satellite clock error Δ119905
119904119907 However the
ionosphere troposphere hardware andmultipath corrupt thecomputed nominal emission time All of these effects areneglected in the present context The same process correctsthe reception time as well
34 Estimation Technique The standard Kalman filter algo-rithm is used to estimate the spacecraft orbit onboard Thisfilter is robust with easy implementation for applicationsin real-time and no requirement of iterating the previouslycollected data and is able to provide the current orbit inreal-time The Extended Kalman Filter (EKF) is a versionwhich is applicable to nonlinear problems and it is composedof time-update and measurement-update cycles The time-update phase updates the state and the covariance matrixalong the time using dynamical equations In this work theestimated state vector is given by
x = (r v b)119879 (12)
where r = (119909 119910 119911)119879 and v = ( 119910 )
119879 are the spacecraftrsquosposition and velocity vectors b = (119887
0 1198871 1198872)119879 where 119887
0 1198871
and 1198872are bias drift and drift rate of the receiver clock
respectively and 119905 is the instant of integration All coordinatesrefer to ToD system
The algorithm used can be found in references [18 19]The details of how it is implemented here can be found inreference [30]
The state error covariance matrix is propagated throughthe transition matrix The conventional filter is implemented
Mathematical Problems in Engineering 5
0001
001
01
1
10
100
0 2 4 6 8 10 12 14 16 18 20 22 24
Estimated position error
Estimated velocity error (MS)
Hours (UTC)
(M)
(M)Real position error
Real velocity error (MS)
Figure 2 Estimated and real error with SA off
0001
001
01
1
10
100
0 2 4 6 8 10 12 14 16 18 20 22 24Hours (UTC)
Estimated position error (M)
Real position error (M)
Estimated velocity error (MS)
Real velocity error (MS)
Figure 3 Estimated and real error with SA on
10
30
50
70
90
0 2 4 6 8 10 12 14 16 18 20 22 24Hours (UTC)
Resid
ual (
M)
minus90
minus70
minus50
minus30
minus10
Figure 4 Typical behavior of the residuals
by calculating only the upper triangular part of the state errorcovariancematrixThe other elements are obtained imposingsymmetry to the matrix The lack of symmetry is one of thehighest sources of truncation error per Kalman filter cycle[31]
One method to avoid the problem of high computationalcost and extended analytical expressions of the transitionmatrix consists of propagating the state vector using thecomplete force model and then computing the transitionmatrix using a simplified force model The analytical calcu-lation of the transition matrix of the Keplerian motion is areasonable approximation when only short time intervals ofthe observations and reference instant are involved [31] On
the other hand the inclusion of 1198692(Earth flattening) effect in
the transition matrix can approximately be done by adoptingthe Markleyrsquos method [32]
Chiaradia et al [33] studied these two methods Thefirst method is an approximation of the Keplerian motionproviding an analytical solution which is then calculatednumerically by solving the Keplerrsquos equationThe second oneis a local numerical approximation that includes the effectof 1198692 They were evaluated according to accuracy processing
time and handling complexity of the equations for two kindsof orbits It has been concluded that the Keplerian motionmodel which was developed by Kuga [31] is still a bettersuited force model to be adopted in the evaluation of ageneral-purpose state transition matrix Some other papersstudying similar or related topics can be found in references[34ndash36]
4 Simulations
To validate and to analyze the algorithm the TopexPoseidon(TP) satellite data is used This satellite carries a dualfrequency receiver GPS onboard to experimentally test theability of the GPS to provide Precise Orbit Determination(POD) The following files are used
(i) the TP observation files that broadcast the code andcarrier pseudorange measurements in two frequen-cies in 10-second GPS time steps and are provided bythe GPSData Processing Facility of the Jet PropulsionLaboratory (JPL) in RINEX format
(ii) the TP Precise Orbit Ephemeris (POE) files that aregenerated by JPL and
(iii) the broadcast GPS navigation message file in RINEXformat provided by Crystal Dynamics Data Informa-tion System (CDDIS) of the Goddard Space FlightCenter (GSFC)
The estimated position and velocity are compared againstthe TP-POE It is claimed to estimate the TP position withaccuracy which is better than 15 cmThe states in the POE areprovided in one minute UTC time steps in ToD system TheTP GPS measurements are provided in 10 seconds of GPStime According to IERS the difference between theUTC andGPS times is approximately an integer number of secondsincreasing timely with the introduction of leap seconds Forexample the difference is 9 seconds for 1993
However in the process of orbit determination thestate is estimated in 30-second intervals in UTC time withtransmission and reception time corrections Then thesedata instants are not coincident Therefore the states areinterpolated through an interpolation (Polint) subroutine[37] With this approach the mean error of the interpolatedstates is 0068m and 25 times 10minus4ms for position and velocityrespectively which does not add any significant bias to theaccuracy evaluation of the results
6 Mathematical Problems in Engineering
0
500
1000
1500
2000
2500
3000
3500
10 30 50 70 90 MaisResidual (M)minus10minus80 minus50 minus30minus100
Figure 5 Histogram of the residuals
00002000400060008001
0012001400160018
002
0 20 40 60 80 100minus20minus80 minus60 minus40minus100Standard deviation of the residuals (M)
Figure 6 Normal distribution of the residuals
Some parameters to be used in evaluating the algorithmin the tests are defined The real position error is given by
Δr equiv [3
sum
119894=1
(119909119894minus 119909119894)2
]
12
(13)
where 119909119894and 119909
119894 119894 = 1 2 3 are the reference components
(or real) and estimated position vectors respectively Theestimated position error is given by
Δr = [3
sum
119894=1
P119894119894]
12
(14)
where P119894119894 119894 = 1 2 3 represents the values of the diagonal
elements of the state covariance matrix of the estimatedposition The real velocity error is given by
Δv equiv [6
sum
119894=4
(119909119894minus 119909119894)2
]
12
(15)
where 119909119894and 119909
119894 119894 = 4 5 6 are the components of the refer-
ence (or real) and estimated velocity vectors respectivelyTheestimated velocity error is given by
Δv = [6
sum
119894=4
P119894119894]
12
(16)
Table 1 Statistical errors with SA on or off
Date Δ119903 (m) Δ119907 (m) Residuals (m)11181993 155 plusmn 68 0014 plusmn 0006 0027 plusmn 132
11191993 174 plusmn 67 0016 plusmn 0006 minus0130 plusmn 134
11201993 176 plusmn 84 0017 plusmn 0007 minus0160 plusmn 226
01031994 165 plusmn 85 0015 plusmn 0008 0004 plusmn 221
01041994 195 plusmn 96 0018 plusmn 0009 minus0160 plusmn 228
01051994 196 plusmn 78 0018 plusmn 0008 0040 plusmn 229
01211994 190 plusmn 77 0018 plusmn 0008 minus0050 plusmn 239
01221994 165 plusmn 86 0015 plusmn 0008 minus0007 plusmn 233
where P119894119894 119894 = 4 5 6 represents the values of the diagonal
elements of the state covariance matrix of the estimatedvelocity And the residual is given by
Δ120588 = z minus 120588119888
(17)
where z and 120588119888
are the observed and calculated pseudorangemeasurements respectively
5 Results
The algorithm is analyzed and tested using 8 complete days ofdata Figures 2 and 3 show the real and filtered position andvelocity errors in m and ms with SA (Select Availability) offand on respectively These figures show the results for oneday of filtering
Figure 4 shows the typical behavior of the pseudorangeresiduals for all tests
Figures 5 and 6 show the histogram and normal distribu-tion of the residuals
Table 1 shows the statistical error for position and velocityvectors and the residual for all tests
It can be noted that for all days tested the real positionand velocity errors are fewer than with the estimated positionand velocity errors by the filter It shows the conservativebehavior of the filter In all cases the filtering takes aroundone hour to converge Before achieving the convergencethe onboard computer can use the GPS navigation solutionprovided by GPS receiver with 100-meter position error Theposition accuracy with the SA off (11181993 and 11191993)or on (other days) is from 15 to 20m with standard deviationfrom 6 to 10m The velocity accuracy varies from 0014to 0018ms with standard deviation going from 0006 to0009ms as shown in Table 1
Through Figures 5 and 6 and Table 1 it can be notedthat the residuals present normal distributionwithmean zeroand standard deviation of around 23m On November 18and 19 1993 the SA is off and the standard deviation of theresiduals is around 133mThis fact shows how the SA affectsthe statistics of the residuals although the estimated state hadnot been significantly degraded
6 Conclusions
The main goal of this work is to achieve accuracy aroundtens ofmeters alongwithminimumcomputational cost when
Mathematical Problems in Engineering 7
determining in real-time artificial satellite orbits onboardconsidering a simplified model For its development singlefrequency GPS measurements are used considering theeffects of the clock offsets of the GPS and user satellites anduser relativistic effects
This algorithm is tested with real data from a satellite witha GPS receiver onboard The satellite orbit is estimated usingthe developed algorithmwith a good accuracy andminimumcomputational costThe algorithmuses a large 30-second stepsize of propagation (10 seconds step size can be used as well)the geopotential model up to order and degree 10 and thecomputationmethod of the transitionmatrix considering theKeplerian motion The position accuracy obtained is betterthan 20m with the SA on or off The results are according toexpected
Acknowledgments
The authors wish to express their appreciation for the supportprovided by UNESP (Universidade Estadual Paulista ldquoJuliode Mesquita Filhordquo) of Brazil and INPE (Brazilian Institutefor Space Research) They also wish to acknowledge theEnglish language review performed by FDCTndashFoundationfor Scientific and Technological Development
References
[1] L L Fu E J Christensen C A Yamarone Jr et al ldquoTOPEXPOSEIDONmission overviewrdquo Journal of Geophysical Researchvol 99 no 12 pp 24369ndash24381 1994
[2] B Haines W Bertiger S Desai et al ldquoInitial orbit determi-nation results for Jason-1 towards a 1-cm orbitrdquo in Proceedingsof the Institute of Navigation Conference (GPS rsquo02) PortlandOregon USA September 2002
[3] K R Choi J C Ries and B D Tapley ldquoJASON-1 precisionorbit determination by combining SLR and DORIS with GPStracking datardquo Marine Geodesy vol 27 no 1-2 pp 319ndash3312004
[4] S B LuthckeN P ZelenskyDD Rowlands F G Lemoine andT A Williams ldquoThe 1-centimeter orbit Jason-1 precision orbitdetermination using GPS SLR DORIS and altimeter datardquoMarine Geodesy vol 26 no 3-4 pp 399ndash421 2003
[5] Z Kang P Nagel and R Pastor ldquoPrecise orbit determinationfor GRACErdquoAdvances in Space Research vol 31 no 8 pp 1875ndash1881 2003
[6] Z Kang B Tapley S Bettadpur J Ries P Nagel and R PastorldquoPrecise orbit determination for the GRACEmission using onlyGPS datardquo Journal of Geodesy vol 80 no 6 pp 322ndash331 2006
[7] D Kuang Y Bar-Sever W Bertiger et al ldquoPrecision orbitdetermination for CHAMP using GPS data from BlackJackreceiverrdquo in Proceeding of the ION National Technical MeetingLong Beach Calif USA January 2001
[8] S Zhu C Reigber and R Koenig ldquoIntegrated adjustment ofCHAMP GRACE and GPS datardquo Journal of Geodesy vol 78no 1-2 pp 103ndash108 2004
[9] B S Lee J S Lee J H Kim et al ldquoReconstruction ofKOMPSAT-1 GPS navigation solutions using GPS data gener-ation and preprocessing programrdquo Acta Astronautica vol 54no 8 pp 571ndash576 2004
[10] B S Lee J C Yoon Y Hwang and J Kim ldquoOrbit determinationsystem for the KOMPSAT-2 using GPS measurement datardquoActa Astronautica vol 57 no 9 pp 747ndash753 2005
[11] B H Putney J A Marshall R S Nerem et al ldquoPrecise orbitdetermination for the TopexPoseidon missionrdquo in Proceed-ings of the AASAIAA Astrodynamics Conference pp 195ndash212August 1993
[12] C Noll International Laser Ranging Service 2012 httpilrsgsfcnasagovsatellite missionslist of satellitescham generalhtml
[13] E Gill and O Montebruck ldquoComparision of GPS-based orbitdetermination strategiesrdquo in Proceedings of the 18th Interna-tional Symposium on Space Flight Dynamics Munich GermanyOctober 2004
[14] V M Gomes H H Kuga and A P M Chiaradia ldquoReal timeorbit determination using GPS navigation solutionrdquo Journal ofthe Brazilian Society ofMechanical Sciences and Engineering vol29 no 3 pp 274ndash278 2007
[15] P C PM PardalHKKuga andRV deMoraes ldquoImplicationsof the application of recursive least squares algorithms tosatellite orbit determination usingGPSmeasurementsrdquoWSEASTransactions on Systems vol 8 no 3 pp 334ndash343 2009
[16] G J Bierman and C L Thornton ldquoNumerical comparisonof Kalman filter algorithms orbit determination case studyrdquoAutomatica vol 13 no 1 pp 23ndash35 1977
[17] R G Brown and P Y C Hwang ldquoA kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[18] A Gelb J F Kasper Jr R A Nash Jr C F Price and AA Sutherland Jr Applied Optimal Estimation The MIT PressInglaterra UK 1974
[19] P S Maybeck Stochastic Models Estimation and Control vol 1Academic Press New York NY USA 1979
[20] J R Raol and N K Sinha ldquoOn the orbit determination prob-lemrdquo IEEE Transactions on Aerospace and Electronic Systemsvol 21 no 3 pp 274ndash291 1985
[21] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications vol 2 chapter 21 pp p559ndashp592AIAA 1996
[22] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer New York NY USA 2001
[23] H K Kuga Adaptive estimation of orbits applied to low altitudesatellites [MS thesis] INPE Sao Jose dos Campos Brazil 1982INPE-2316-TDL079 in Portuguese
[24] H K Kuga Orbit determination of Earth artificial satellitesthrough state estimation techniques combined with smoothingtechniques [PhD dissertation] INPE Sao Jose dos CamposBrazil 1989 INPE-4959-TDL079 in Portuguese
[25] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[26] S Pines ldquoUniform representation of the gravitational potentialand its derivativesrdquo AIAA Journal vol 11 no 11 pp 1508ndash15111973
[27] A P M Chiaradia H K Kuga and A F B A Prado ldquoInves-tigation on ionospheric correction models for GPS signalsrdquo inAdvances in Space Dynamics A F B A Prado Ed pp 214ndash219Instituto Nacional de Pesquisas Espaciais 2000
[28] A P M Chiaradia E Gill O Montenbruck H K Kuga andA F B A Prado Algorithms for on-Board Orbit Determination
8 Mathematical Problems in Engineering
Using GPSmdashOBODE-GPS DLR Alemanha Germany 2000DLRmdashGSOC TN 00-04
[29] A Leick GPS Satellite Surveying INC John Wiley amp Sons 2ndedition 1995
[30] A P M Chiaradia H K Kuga and A F B A Prado ldquoInvesti-gation of simplifiedmodels for orbit determination using singlefrequency GPS measurementsrdquo Journal of the Brazilian Societyof Mechanical Sciences vol 21 pp 165ndash172 1999
[31] H K Kuga TransitionMatrix of the Elliptical KeplerianMotionINPE Sao Jose dos Campos Brazil 1986 INPE-3779-NTE250in Portuguese
[32] F L Markley ldquoApproximate cartesian state transition matrixrdquoThe Journal of the Astronautical Sciences vol 34 no 12 pp 161ndash169 1986
[33] A P M Chiaradia H K Kuga and A F B A Prado ldquoCom-parison between twomethods to calculate the transitionmatrixof orbit motionrdquo Mathematical Problems in Engineering vol2012 Article ID 768973 12 pages 2012
[34] VM Gomes H K Kuga and A F B A Prado ldquoReal time orbitdetermination with different force fieldsrdquoWSEAS Transactionson Applied and Theoretical Mechanics vol 5 no 1 pp 23ndash322010
[35] V M Gomes A F B A Prado and H K Kuga ldquoLowthrust maneuvers for artificial satellitesrdquo WSEAS Transactionson Applied and Theoretical Mechanics vol 3 no 10 pp 859ndash868 2008
[36] V M Gomes Prado A F B A and H K Kuga ldquoFiltering theGPS navigation solution for real time orbit determination usingdifferent dynamical modelsrdquo in Proceedings of the 5th WSEASInternational Conference on Applied and Theoretical Mechanics(MECHANICS rsquo09) vol 1 pp 1ndash10 Puerto de La Cruz Spain2009
[37] HW Press B P Flannery S A Teukolsky andW T VetterlingNumerical Recipesedition Cambridge University Press 3rdedition 1987
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
119883
119885
119884
Pseudorange
119903GPS
119903119906
Figure 1 Orbit determination using GPS
3 Description of the Algorithm
The algorithm is developed to determine artificial satelliteorbits according the dynamical model (the force model)The method is used to integrate the differential equationsof a satellite motion the computation of the state transitionmatrix the measurement model and the estimation tech-nique
For that sake the following aspects are verified
(a) concerning the dynamical model what is better orderand degree truncation of the spherical harmoniccoefficients of the JGM-2 model in order to reach theobjectives in terms of low computational cost relativeaccuracy (tens of meters) and the lowest possibleorder and degree of the harmonical coefficients
(b) concerning the integration method with step size ofthe fixed step RK4 integrator to use considering lowcomputational cost accuracy and the selection ofappropriate reference systems and transformations
(c) considering the measurement model where the errorssource is included in the model and
(d) considering the filtering the EKF is used and the useof the simplified transition matrix considering eitherthe pure Keplerian motion or including at least the 119869
2
effects
31 Force Model and Numerical Integration The main forcesacting on an artificial satellite may be classified as grav-itational (eg geopotential third-body perturbations andtides) and nongravitational forces (eg atmospheric dragsolar radiation pressure) These forces are rather difficult tomodel so a mathematically inaccurate model of the motion
with respect to true motion is sometimes adopted in Kuga[23 24]
To choose a simplified force model to be adopted in thiswork the following factors are considered generality orbitaccuracy and computational cost for orbit determination ina real-time and onboard environment Therefore only forcesdue to the Earth gravitational field should be implemented
The considered harmonic coefficients of the Earth geopo-tential field are set up to order and degree 10 of JGM-2model according to studies developed inChiaradia et al [25]without overloading the processing time
The acceleration and the related partial derivatives matri-ces are computed through the recurrence relations accordingto Pines [26] in Earth-fixed (EF) coordinatesThe coordinatetransformation from True of Date (ToD) to Pseudo-Earthfixed equator and prime meridian (PEF) takes into accountthe Earth sidereal rotation but the polar motion is neglectedin this work
The integration of the satellite motion equation is carriedout using the simple 4th order of the Runge-Kutta (RK4)algorithm It is implemented without any mechanism of stepadjustment or error control The RK4 is considered an ade-quate numerical integrator due to its simplicity fair accuracylow truncation error and low computational burden Aninitialization procedure is not necessary and the step size isquite easy to change The 30-second integration step intervalis used
32 Measurement Model With the advances of technologythe single frequency GPS receivers provide a good basis toachieve fair precision at a relatively low cost still attaining theaccuracy requirements of general missions In this way onlythe code pseudorange in L1 frequency is used to determinethe satellite orbit providing the accuracy required by themission similar to the one shown in this work
The errors considered in the CA code pseudorangemeasurements are the GPS satellite and receiver clock offsetsChiaradia et al [25 27] studied the need of considering theionospheric correction model It has been concluded thatthe ionospheric effect (around 3ndash6 meters) does not affectsignificantly the final accuracy of the orbit In this way it willbe neglected once the goal is not to achieve high precision(around centimeters) In high precision and onboard appli-cations some ionospheric correction for single frequencyshould be applied but this may add some complexity if weneed to implement a better ionospheric model
The equation of the CA code pseudorange in L1 fre-quency is given by
120588119888= 120588 + 119888 [Δ119905GPS (119905) minus Δ119905119906 (119905)] (1)
where 120588119888is the CA code pseudorange in L1 119888 is the speed of
light Δ119905GPS is the GPS satellite clock offset Δ119905119906 is the receiverclock offset 119905 is the observation instant in GPS time and 120588 isthe geometric range given by
120588 = radic(119909GPS minus 119909)2
+ (119910GPS minus 119910)2
+ (119911GPS minus 119911)2
(2)
where 119909 119910 and 119911 are the positional states of the user satelliteat reception time (in GPS time) and 119909GPS 119910GPS and 119911GPS are
4 Mathematical Problems in Engineering
the positional states of the GPS satellite at transmission time(in GPS time) corrected for light time delay
The second term on the right side of (1) is the clock biasthat represents the combined clock offsets of the satellite andof the receiver with respect to GPS time Each GPS satellitecontributes with one clock bias The information for GPSsatellite clocks is known and transmitted via a navigationmessage in the form of three polynomial coefficients with areference time 119905oc The clock correction of the GPS satellitefor epoch 119905 is
119905 = 119905GPS minus Δ119905GPS (3)
Δ119905GPS = 1198861198910 + 1198861198911 (119905 minus 119905oc) + 1198861198912(119905 minus 119905oc)2
+ 120575GPS119877
(4)
120575GPS119877
=2
1198882radic119886120583 119890 sin119864 (5)
where 119905GPS is the spacecraft code phase time at messagetransmission time in seconds 119886
1198910 1198861198911 and 119886
1198912are bias
drift and drift rate of GPS satellite clock respectively 119905ocis the reference time in seconds measured from the GPStime weekly epoch 120575
119877is a small relativistic correction of
the GPS satellite clock caused by orbital eccentricity 119890 119886 isthe semimajor axis of the orbit 120583 is the Earth gravitationalconstant and 119864 is the eccentric anomaly
The relativistic effect is included in the clock polynomialbroadcast via navigationmessage If amore accurate equationis required the relativistic effectsmust be subtracted from theclock polynomial coefficientsThe polynomial coefficient 119886
1198910
1198861198911 and 119886
1198912are transmitted in units of sec nondimensional
and 1sec respectivelyThe clock data reference time 119905oc is alsobroadcastedThevalue of 119905GPS must account for the beginningor the end-of-week crossoversTheusermay approximate 119905 by119905GPS in (3)
The user clock offset is part of the estimated state vectorgiven by [28]
119888Δ119905119906= 1198870+ 1198871Δ119879 + 119887
2Δ1198792
+ 120575USER119877
(6)
where 1198870 1198871 and 119887
2are the bias drift and drift rate of the
user clock and Δ119879 is the elapsed time since the instant of thefirst measurement The relativistic effect in the user clock iscalculated by using the best available estimated state vectorin the epoch
33 GPS Travel and Reception Times The computation ofgeometric range 120588 is required for both pseudorange andcarrier phase processing The GPS position coordinates areused at the instant of emissionHowever the reception time isused to compute itThen this time is corrected by subtractingthe signal travel time to obtain the emission time Thereforethe travel time is computed through an iterative process thatstarts assuming an average value for travel time 120591 Nextthe GPS position for the epoch (119905 minus 120591) is interpolated andthen the geometric range is computed which can be used toreconstruct the travel time by [29]
120591 =120588
119888 (7)
The light-time iteration is usually performed in an inertialsystem with position vector r = (119909 119910 119911) and the GPS satelliteposition vector rGPS = (119909GPS 119910GPS 119911GPS)Then the positionsfrom inertial to the Earth-fixed WGS84 system or vice versaare transformed So the signal path is given as [22]
120588 = RWGS(119905) (rGPS (119905 minus 120591) minus r (119905)) (8)
whereRWGS is the rotationmatrix from inertial to Earth-fixedWGS-84 system Making use of the approximation
RWGS(119905) asymp R
119911(120596119890120591)RWGS
(119905 minus 120591) (9)
where 120596119890is the Earth rotation rate the inertial position of the
GPS satellite may be substituted by the corresponding Earth-fixed position
rWGSGPS (119905 minus 120591) = RWGS
(119905 minus 120591) rGPS (119905 minus 120591) (10)
This yields in the Earth-fixed reference frame
120588 = 119888120591 =10038161003816100381610038161003816R119911(120596119890120591) rGPS (119905 minus 120591) minus rWGS
(119905)10038161003816100381610038161003816 (11)
If the discrepancy between the first and second approxima-tion of 120591 is greater than a specified criterion the iteration isrepeated that is a new satellite position is interpolated anda new distance is computed and so on Generally a couple ofiterations are sufficient
This computation is not affected by the receiver clockerror Δ119905
119906and the satellite clock error Δ119905
119904119907 However the
ionosphere troposphere hardware andmultipath corrupt thecomputed nominal emission time All of these effects areneglected in the present context The same process correctsthe reception time as well
34 Estimation Technique The standard Kalman filter algo-rithm is used to estimate the spacecraft orbit onboard Thisfilter is robust with easy implementation for applicationsin real-time and no requirement of iterating the previouslycollected data and is able to provide the current orbit inreal-time The Extended Kalman Filter (EKF) is a versionwhich is applicable to nonlinear problems and it is composedof time-update and measurement-update cycles The time-update phase updates the state and the covariance matrixalong the time using dynamical equations In this work theestimated state vector is given by
x = (r v b)119879 (12)
where r = (119909 119910 119911)119879 and v = ( 119910 )
119879 are the spacecraftrsquosposition and velocity vectors b = (119887
0 1198871 1198872)119879 where 119887
0 1198871
and 1198872are bias drift and drift rate of the receiver clock
respectively and 119905 is the instant of integration All coordinatesrefer to ToD system
The algorithm used can be found in references [18 19]The details of how it is implemented here can be found inreference [30]
The state error covariance matrix is propagated throughthe transition matrix The conventional filter is implemented
Mathematical Problems in Engineering 5
0001
001
01
1
10
100
0 2 4 6 8 10 12 14 16 18 20 22 24
Estimated position error
Estimated velocity error (MS)
Hours (UTC)
(M)
(M)Real position error
Real velocity error (MS)
Figure 2 Estimated and real error with SA off
0001
001
01
1
10
100
0 2 4 6 8 10 12 14 16 18 20 22 24Hours (UTC)
Estimated position error (M)
Real position error (M)
Estimated velocity error (MS)
Real velocity error (MS)
Figure 3 Estimated and real error with SA on
10
30
50
70
90
0 2 4 6 8 10 12 14 16 18 20 22 24Hours (UTC)
Resid
ual (
M)
minus90
minus70
minus50
minus30
minus10
Figure 4 Typical behavior of the residuals
by calculating only the upper triangular part of the state errorcovariancematrixThe other elements are obtained imposingsymmetry to the matrix The lack of symmetry is one of thehighest sources of truncation error per Kalman filter cycle[31]
One method to avoid the problem of high computationalcost and extended analytical expressions of the transitionmatrix consists of propagating the state vector using thecomplete force model and then computing the transitionmatrix using a simplified force model The analytical calcu-lation of the transition matrix of the Keplerian motion is areasonable approximation when only short time intervals ofthe observations and reference instant are involved [31] On
the other hand the inclusion of 1198692(Earth flattening) effect in
the transition matrix can approximately be done by adoptingthe Markleyrsquos method [32]
Chiaradia et al [33] studied these two methods Thefirst method is an approximation of the Keplerian motionproviding an analytical solution which is then calculatednumerically by solving the Keplerrsquos equationThe second oneis a local numerical approximation that includes the effectof 1198692 They were evaluated according to accuracy processing
time and handling complexity of the equations for two kindsof orbits It has been concluded that the Keplerian motionmodel which was developed by Kuga [31] is still a bettersuited force model to be adopted in the evaluation of ageneral-purpose state transition matrix Some other papersstudying similar or related topics can be found in references[34ndash36]
4 Simulations
To validate and to analyze the algorithm the TopexPoseidon(TP) satellite data is used This satellite carries a dualfrequency receiver GPS onboard to experimentally test theability of the GPS to provide Precise Orbit Determination(POD) The following files are used
(i) the TP observation files that broadcast the code andcarrier pseudorange measurements in two frequen-cies in 10-second GPS time steps and are provided bythe GPSData Processing Facility of the Jet PropulsionLaboratory (JPL) in RINEX format
(ii) the TP Precise Orbit Ephemeris (POE) files that aregenerated by JPL and
(iii) the broadcast GPS navigation message file in RINEXformat provided by Crystal Dynamics Data Informa-tion System (CDDIS) of the Goddard Space FlightCenter (GSFC)
The estimated position and velocity are compared againstthe TP-POE It is claimed to estimate the TP position withaccuracy which is better than 15 cmThe states in the POE areprovided in one minute UTC time steps in ToD system TheTP GPS measurements are provided in 10 seconds of GPStime According to IERS the difference between theUTC andGPS times is approximately an integer number of secondsincreasing timely with the introduction of leap seconds Forexample the difference is 9 seconds for 1993
However in the process of orbit determination thestate is estimated in 30-second intervals in UTC time withtransmission and reception time corrections Then thesedata instants are not coincident Therefore the states areinterpolated through an interpolation (Polint) subroutine[37] With this approach the mean error of the interpolatedstates is 0068m and 25 times 10minus4ms for position and velocityrespectively which does not add any significant bias to theaccuracy evaluation of the results
6 Mathematical Problems in Engineering
0
500
1000
1500
2000
2500
3000
3500
10 30 50 70 90 MaisResidual (M)minus10minus80 minus50 minus30minus100
Figure 5 Histogram of the residuals
00002000400060008001
0012001400160018
002
0 20 40 60 80 100minus20minus80 minus60 minus40minus100Standard deviation of the residuals (M)
Figure 6 Normal distribution of the residuals
Some parameters to be used in evaluating the algorithmin the tests are defined The real position error is given by
Δr equiv [3
sum
119894=1
(119909119894minus 119909119894)2
]
12
(13)
where 119909119894and 119909
119894 119894 = 1 2 3 are the reference components
(or real) and estimated position vectors respectively Theestimated position error is given by
Δr = [3
sum
119894=1
P119894119894]
12
(14)
where P119894119894 119894 = 1 2 3 represents the values of the diagonal
elements of the state covariance matrix of the estimatedposition The real velocity error is given by
Δv equiv [6
sum
119894=4
(119909119894minus 119909119894)2
]
12
(15)
where 119909119894and 119909
119894 119894 = 4 5 6 are the components of the refer-
ence (or real) and estimated velocity vectors respectivelyTheestimated velocity error is given by
Δv = [6
sum
119894=4
P119894119894]
12
(16)
Table 1 Statistical errors with SA on or off
Date Δ119903 (m) Δ119907 (m) Residuals (m)11181993 155 plusmn 68 0014 plusmn 0006 0027 plusmn 132
11191993 174 plusmn 67 0016 plusmn 0006 minus0130 plusmn 134
11201993 176 plusmn 84 0017 plusmn 0007 minus0160 plusmn 226
01031994 165 plusmn 85 0015 plusmn 0008 0004 plusmn 221
01041994 195 plusmn 96 0018 plusmn 0009 minus0160 plusmn 228
01051994 196 plusmn 78 0018 plusmn 0008 0040 plusmn 229
01211994 190 plusmn 77 0018 plusmn 0008 minus0050 plusmn 239
01221994 165 plusmn 86 0015 plusmn 0008 minus0007 plusmn 233
where P119894119894 119894 = 4 5 6 represents the values of the diagonal
elements of the state covariance matrix of the estimatedvelocity And the residual is given by
Δ120588 = z minus 120588119888
(17)
where z and 120588119888
are the observed and calculated pseudorangemeasurements respectively
5 Results
The algorithm is analyzed and tested using 8 complete days ofdata Figures 2 and 3 show the real and filtered position andvelocity errors in m and ms with SA (Select Availability) offand on respectively These figures show the results for oneday of filtering
Figure 4 shows the typical behavior of the pseudorangeresiduals for all tests
Figures 5 and 6 show the histogram and normal distribu-tion of the residuals
Table 1 shows the statistical error for position and velocityvectors and the residual for all tests
It can be noted that for all days tested the real positionand velocity errors are fewer than with the estimated positionand velocity errors by the filter It shows the conservativebehavior of the filter In all cases the filtering takes aroundone hour to converge Before achieving the convergencethe onboard computer can use the GPS navigation solutionprovided by GPS receiver with 100-meter position error Theposition accuracy with the SA off (11181993 and 11191993)or on (other days) is from 15 to 20m with standard deviationfrom 6 to 10m The velocity accuracy varies from 0014to 0018ms with standard deviation going from 0006 to0009ms as shown in Table 1
Through Figures 5 and 6 and Table 1 it can be notedthat the residuals present normal distributionwithmean zeroand standard deviation of around 23m On November 18and 19 1993 the SA is off and the standard deviation of theresiduals is around 133mThis fact shows how the SA affectsthe statistics of the residuals although the estimated state hadnot been significantly degraded
6 Conclusions
The main goal of this work is to achieve accuracy aroundtens ofmeters alongwithminimumcomputational cost when
Mathematical Problems in Engineering 7
determining in real-time artificial satellite orbits onboardconsidering a simplified model For its development singlefrequency GPS measurements are used considering theeffects of the clock offsets of the GPS and user satellites anduser relativistic effects
This algorithm is tested with real data from a satellite witha GPS receiver onboard The satellite orbit is estimated usingthe developed algorithmwith a good accuracy andminimumcomputational costThe algorithmuses a large 30-second stepsize of propagation (10 seconds step size can be used as well)the geopotential model up to order and degree 10 and thecomputationmethod of the transitionmatrix considering theKeplerian motion The position accuracy obtained is betterthan 20m with the SA on or off The results are according toexpected
Acknowledgments
The authors wish to express their appreciation for the supportprovided by UNESP (Universidade Estadual Paulista ldquoJuliode Mesquita Filhordquo) of Brazil and INPE (Brazilian Institutefor Space Research) They also wish to acknowledge theEnglish language review performed by FDCTndashFoundationfor Scientific and Technological Development
References
[1] L L Fu E J Christensen C A Yamarone Jr et al ldquoTOPEXPOSEIDONmission overviewrdquo Journal of Geophysical Researchvol 99 no 12 pp 24369ndash24381 1994
[2] B Haines W Bertiger S Desai et al ldquoInitial orbit determi-nation results for Jason-1 towards a 1-cm orbitrdquo in Proceedingsof the Institute of Navigation Conference (GPS rsquo02) PortlandOregon USA September 2002
[3] K R Choi J C Ries and B D Tapley ldquoJASON-1 precisionorbit determination by combining SLR and DORIS with GPStracking datardquo Marine Geodesy vol 27 no 1-2 pp 319ndash3312004
[4] S B LuthckeN P ZelenskyDD Rowlands F G Lemoine andT A Williams ldquoThe 1-centimeter orbit Jason-1 precision orbitdetermination using GPS SLR DORIS and altimeter datardquoMarine Geodesy vol 26 no 3-4 pp 399ndash421 2003
[5] Z Kang P Nagel and R Pastor ldquoPrecise orbit determinationfor GRACErdquoAdvances in Space Research vol 31 no 8 pp 1875ndash1881 2003
[6] Z Kang B Tapley S Bettadpur J Ries P Nagel and R PastorldquoPrecise orbit determination for the GRACEmission using onlyGPS datardquo Journal of Geodesy vol 80 no 6 pp 322ndash331 2006
[7] D Kuang Y Bar-Sever W Bertiger et al ldquoPrecision orbitdetermination for CHAMP using GPS data from BlackJackreceiverrdquo in Proceeding of the ION National Technical MeetingLong Beach Calif USA January 2001
[8] S Zhu C Reigber and R Koenig ldquoIntegrated adjustment ofCHAMP GRACE and GPS datardquo Journal of Geodesy vol 78no 1-2 pp 103ndash108 2004
[9] B S Lee J S Lee J H Kim et al ldquoReconstruction ofKOMPSAT-1 GPS navigation solutions using GPS data gener-ation and preprocessing programrdquo Acta Astronautica vol 54no 8 pp 571ndash576 2004
[10] B S Lee J C Yoon Y Hwang and J Kim ldquoOrbit determinationsystem for the KOMPSAT-2 using GPS measurement datardquoActa Astronautica vol 57 no 9 pp 747ndash753 2005
[11] B H Putney J A Marshall R S Nerem et al ldquoPrecise orbitdetermination for the TopexPoseidon missionrdquo in Proceed-ings of the AASAIAA Astrodynamics Conference pp 195ndash212August 1993
[12] C Noll International Laser Ranging Service 2012 httpilrsgsfcnasagovsatellite missionslist of satellitescham generalhtml
[13] E Gill and O Montebruck ldquoComparision of GPS-based orbitdetermination strategiesrdquo in Proceedings of the 18th Interna-tional Symposium on Space Flight Dynamics Munich GermanyOctober 2004
[14] V M Gomes H H Kuga and A P M Chiaradia ldquoReal timeorbit determination using GPS navigation solutionrdquo Journal ofthe Brazilian Society ofMechanical Sciences and Engineering vol29 no 3 pp 274ndash278 2007
[15] P C PM PardalHKKuga andRV deMoraes ldquoImplicationsof the application of recursive least squares algorithms tosatellite orbit determination usingGPSmeasurementsrdquoWSEASTransactions on Systems vol 8 no 3 pp 334ndash343 2009
[16] G J Bierman and C L Thornton ldquoNumerical comparisonof Kalman filter algorithms orbit determination case studyrdquoAutomatica vol 13 no 1 pp 23ndash35 1977
[17] R G Brown and P Y C Hwang ldquoA kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[18] A Gelb J F Kasper Jr R A Nash Jr C F Price and AA Sutherland Jr Applied Optimal Estimation The MIT PressInglaterra UK 1974
[19] P S Maybeck Stochastic Models Estimation and Control vol 1Academic Press New York NY USA 1979
[20] J R Raol and N K Sinha ldquoOn the orbit determination prob-lemrdquo IEEE Transactions on Aerospace and Electronic Systemsvol 21 no 3 pp 274ndash291 1985
[21] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications vol 2 chapter 21 pp p559ndashp592AIAA 1996
[22] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer New York NY USA 2001
[23] H K Kuga Adaptive estimation of orbits applied to low altitudesatellites [MS thesis] INPE Sao Jose dos Campos Brazil 1982INPE-2316-TDL079 in Portuguese
[24] H K Kuga Orbit determination of Earth artificial satellitesthrough state estimation techniques combined with smoothingtechniques [PhD dissertation] INPE Sao Jose dos CamposBrazil 1989 INPE-4959-TDL079 in Portuguese
[25] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[26] S Pines ldquoUniform representation of the gravitational potentialand its derivativesrdquo AIAA Journal vol 11 no 11 pp 1508ndash15111973
[27] A P M Chiaradia H K Kuga and A F B A Prado ldquoInves-tigation on ionospheric correction models for GPS signalsrdquo inAdvances in Space Dynamics A F B A Prado Ed pp 214ndash219Instituto Nacional de Pesquisas Espaciais 2000
[28] A P M Chiaradia E Gill O Montenbruck H K Kuga andA F B A Prado Algorithms for on-Board Orbit Determination
8 Mathematical Problems in Engineering
Using GPSmdashOBODE-GPS DLR Alemanha Germany 2000DLRmdashGSOC TN 00-04
[29] A Leick GPS Satellite Surveying INC John Wiley amp Sons 2ndedition 1995
[30] A P M Chiaradia H K Kuga and A F B A Prado ldquoInvesti-gation of simplifiedmodels for orbit determination using singlefrequency GPS measurementsrdquo Journal of the Brazilian Societyof Mechanical Sciences vol 21 pp 165ndash172 1999
[31] H K Kuga TransitionMatrix of the Elliptical KeplerianMotionINPE Sao Jose dos Campos Brazil 1986 INPE-3779-NTE250in Portuguese
[32] F L Markley ldquoApproximate cartesian state transition matrixrdquoThe Journal of the Astronautical Sciences vol 34 no 12 pp 161ndash169 1986
[33] A P M Chiaradia H K Kuga and A F B A Prado ldquoCom-parison between twomethods to calculate the transitionmatrixof orbit motionrdquo Mathematical Problems in Engineering vol2012 Article ID 768973 12 pages 2012
[34] VM Gomes H K Kuga and A F B A Prado ldquoReal time orbitdetermination with different force fieldsrdquoWSEAS Transactionson Applied and Theoretical Mechanics vol 5 no 1 pp 23ndash322010
[35] V M Gomes A F B A Prado and H K Kuga ldquoLowthrust maneuvers for artificial satellitesrdquo WSEAS Transactionson Applied and Theoretical Mechanics vol 3 no 10 pp 859ndash868 2008
[36] V M Gomes Prado A F B A and H K Kuga ldquoFiltering theGPS navigation solution for real time orbit determination usingdifferent dynamical modelsrdquo in Proceedings of the 5th WSEASInternational Conference on Applied and Theoretical Mechanics(MECHANICS rsquo09) vol 1 pp 1ndash10 Puerto de La Cruz Spain2009
[37] HW Press B P Flannery S A Teukolsky andW T VetterlingNumerical Recipesedition Cambridge University Press 3rdedition 1987
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
the positional states of the GPS satellite at transmission time(in GPS time) corrected for light time delay
The second term on the right side of (1) is the clock biasthat represents the combined clock offsets of the satellite andof the receiver with respect to GPS time Each GPS satellitecontributes with one clock bias The information for GPSsatellite clocks is known and transmitted via a navigationmessage in the form of three polynomial coefficients with areference time 119905oc The clock correction of the GPS satellitefor epoch 119905 is
119905 = 119905GPS minus Δ119905GPS (3)
Δ119905GPS = 1198861198910 + 1198861198911 (119905 minus 119905oc) + 1198861198912(119905 minus 119905oc)2
+ 120575GPS119877
(4)
120575GPS119877
=2
1198882radic119886120583 119890 sin119864 (5)
where 119905GPS is the spacecraft code phase time at messagetransmission time in seconds 119886
1198910 1198861198911 and 119886
1198912are bias
drift and drift rate of GPS satellite clock respectively 119905ocis the reference time in seconds measured from the GPStime weekly epoch 120575
119877is a small relativistic correction of
the GPS satellite clock caused by orbital eccentricity 119890 119886 isthe semimajor axis of the orbit 120583 is the Earth gravitationalconstant and 119864 is the eccentric anomaly
The relativistic effect is included in the clock polynomialbroadcast via navigationmessage If amore accurate equationis required the relativistic effectsmust be subtracted from theclock polynomial coefficientsThe polynomial coefficient 119886
1198910
1198861198911 and 119886
1198912are transmitted in units of sec nondimensional
and 1sec respectivelyThe clock data reference time 119905oc is alsobroadcastedThevalue of 119905GPS must account for the beginningor the end-of-week crossoversTheusermay approximate 119905 by119905GPS in (3)
The user clock offset is part of the estimated state vectorgiven by [28]
119888Δ119905119906= 1198870+ 1198871Δ119879 + 119887
2Δ1198792
+ 120575USER119877
(6)
where 1198870 1198871 and 119887
2are the bias drift and drift rate of the
user clock and Δ119879 is the elapsed time since the instant of thefirst measurement The relativistic effect in the user clock iscalculated by using the best available estimated state vectorin the epoch
33 GPS Travel and Reception Times The computation ofgeometric range 120588 is required for both pseudorange andcarrier phase processing The GPS position coordinates areused at the instant of emissionHowever the reception time isused to compute itThen this time is corrected by subtractingthe signal travel time to obtain the emission time Thereforethe travel time is computed through an iterative process thatstarts assuming an average value for travel time 120591 Nextthe GPS position for the epoch (119905 minus 120591) is interpolated andthen the geometric range is computed which can be used toreconstruct the travel time by [29]
120591 =120588
119888 (7)
The light-time iteration is usually performed in an inertialsystem with position vector r = (119909 119910 119911) and the GPS satelliteposition vector rGPS = (119909GPS 119910GPS 119911GPS)Then the positionsfrom inertial to the Earth-fixed WGS84 system or vice versaare transformed So the signal path is given as [22]
120588 = RWGS(119905) (rGPS (119905 minus 120591) minus r (119905)) (8)
whereRWGS is the rotationmatrix from inertial to Earth-fixedWGS-84 system Making use of the approximation
RWGS(119905) asymp R
119911(120596119890120591)RWGS
(119905 minus 120591) (9)
where 120596119890is the Earth rotation rate the inertial position of the
GPS satellite may be substituted by the corresponding Earth-fixed position
rWGSGPS (119905 minus 120591) = RWGS
(119905 minus 120591) rGPS (119905 minus 120591) (10)
This yields in the Earth-fixed reference frame
120588 = 119888120591 =10038161003816100381610038161003816R119911(120596119890120591) rGPS (119905 minus 120591) minus rWGS
(119905)10038161003816100381610038161003816 (11)
If the discrepancy between the first and second approxima-tion of 120591 is greater than a specified criterion the iteration isrepeated that is a new satellite position is interpolated anda new distance is computed and so on Generally a couple ofiterations are sufficient
This computation is not affected by the receiver clockerror Δ119905
119906and the satellite clock error Δ119905
119904119907 However the
ionosphere troposphere hardware andmultipath corrupt thecomputed nominal emission time All of these effects areneglected in the present context The same process correctsthe reception time as well
34 Estimation Technique The standard Kalman filter algo-rithm is used to estimate the spacecraft orbit onboard Thisfilter is robust with easy implementation for applicationsin real-time and no requirement of iterating the previouslycollected data and is able to provide the current orbit inreal-time The Extended Kalman Filter (EKF) is a versionwhich is applicable to nonlinear problems and it is composedof time-update and measurement-update cycles The time-update phase updates the state and the covariance matrixalong the time using dynamical equations In this work theestimated state vector is given by
x = (r v b)119879 (12)
where r = (119909 119910 119911)119879 and v = ( 119910 )
119879 are the spacecraftrsquosposition and velocity vectors b = (119887
0 1198871 1198872)119879 where 119887
0 1198871
and 1198872are bias drift and drift rate of the receiver clock
respectively and 119905 is the instant of integration All coordinatesrefer to ToD system
The algorithm used can be found in references [18 19]The details of how it is implemented here can be found inreference [30]
The state error covariance matrix is propagated throughthe transition matrix The conventional filter is implemented
Mathematical Problems in Engineering 5
0001
001
01
1
10
100
0 2 4 6 8 10 12 14 16 18 20 22 24
Estimated position error
Estimated velocity error (MS)
Hours (UTC)
(M)
(M)Real position error
Real velocity error (MS)
Figure 2 Estimated and real error with SA off
0001
001
01
1
10
100
0 2 4 6 8 10 12 14 16 18 20 22 24Hours (UTC)
Estimated position error (M)
Real position error (M)
Estimated velocity error (MS)
Real velocity error (MS)
Figure 3 Estimated and real error with SA on
10
30
50
70
90
0 2 4 6 8 10 12 14 16 18 20 22 24Hours (UTC)
Resid
ual (
M)
minus90
minus70
minus50
minus30
minus10
Figure 4 Typical behavior of the residuals
by calculating only the upper triangular part of the state errorcovariancematrixThe other elements are obtained imposingsymmetry to the matrix The lack of symmetry is one of thehighest sources of truncation error per Kalman filter cycle[31]
One method to avoid the problem of high computationalcost and extended analytical expressions of the transitionmatrix consists of propagating the state vector using thecomplete force model and then computing the transitionmatrix using a simplified force model The analytical calcu-lation of the transition matrix of the Keplerian motion is areasonable approximation when only short time intervals ofthe observations and reference instant are involved [31] On
the other hand the inclusion of 1198692(Earth flattening) effect in
the transition matrix can approximately be done by adoptingthe Markleyrsquos method [32]
Chiaradia et al [33] studied these two methods Thefirst method is an approximation of the Keplerian motionproviding an analytical solution which is then calculatednumerically by solving the Keplerrsquos equationThe second oneis a local numerical approximation that includes the effectof 1198692 They were evaluated according to accuracy processing
time and handling complexity of the equations for two kindsof orbits It has been concluded that the Keplerian motionmodel which was developed by Kuga [31] is still a bettersuited force model to be adopted in the evaluation of ageneral-purpose state transition matrix Some other papersstudying similar or related topics can be found in references[34ndash36]
4 Simulations
To validate and to analyze the algorithm the TopexPoseidon(TP) satellite data is used This satellite carries a dualfrequency receiver GPS onboard to experimentally test theability of the GPS to provide Precise Orbit Determination(POD) The following files are used
(i) the TP observation files that broadcast the code andcarrier pseudorange measurements in two frequen-cies in 10-second GPS time steps and are provided bythe GPSData Processing Facility of the Jet PropulsionLaboratory (JPL) in RINEX format
(ii) the TP Precise Orbit Ephemeris (POE) files that aregenerated by JPL and
(iii) the broadcast GPS navigation message file in RINEXformat provided by Crystal Dynamics Data Informa-tion System (CDDIS) of the Goddard Space FlightCenter (GSFC)
The estimated position and velocity are compared againstthe TP-POE It is claimed to estimate the TP position withaccuracy which is better than 15 cmThe states in the POE areprovided in one minute UTC time steps in ToD system TheTP GPS measurements are provided in 10 seconds of GPStime According to IERS the difference between theUTC andGPS times is approximately an integer number of secondsincreasing timely with the introduction of leap seconds Forexample the difference is 9 seconds for 1993
However in the process of orbit determination thestate is estimated in 30-second intervals in UTC time withtransmission and reception time corrections Then thesedata instants are not coincident Therefore the states areinterpolated through an interpolation (Polint) subroutine[37] With this approach the mean error of the interpolatedstates is 0068m and 25 times 10minus4ms for position and velocityrespectively which does not add any significant bias to theaccuracy evaluation of the results
6 Mathematical Problems in Engineering
0
500
1000
1500
2000
2500
3000
3500
10 30 50 70 90 MaisResidual (M)minus10minus80 minus50 minus30minus100
Figure 5 Histogram of the residuals
00002000400060008001
0012001400160018
002
0 20 40 60 80 100minus20minus80 minus60 minus40minus100Standard deviation of the residuals (M)
Figure 6 Normal distribution of the residuals
Some parameters to be used in evaluating the algorithmin the tests are defined The real position error is given by
Δr equiv [3
sum
119894=1
(119909119894minus 119909119894)2
]
12
(13)
where 119909119894and 119909
119894 119894 = 1 2 3 are the reference components
(or real) and estimated position vectors respectively Theestimated position error is given by
Δr = [3
sum
119894=1
P119894119894]
12
(14)
where P119894119894 119894 = 1 2 3 represents the values of the diagonal
elements of the state covariance matrix of the estimatedposition The real velocity error is given by
Δv equiv [6
sum
119894=4
(119909119894minus 119909119894)2
]
12
(15)
where 119909119894and 119909
119894 119894 = 4 5 6 are the components of the refer-
ence (or real) and estimated velocity vectors respectivelyTheestimated velocity error is given by
Δv = [6
sum
119894=4
P119894119894]
12
(16)
Table 1 Statistical errors with SA on or off
Date Δ119903 (m) Δ119907 (m) Residuals (m)11181993 155 plusmn 68 0014 plusmn 0006 0027 plusmn 132
11191993 174 plusmn 67 0016 plusmn 0006 minus0130 plusmn 134
11201993 176 plusmn 84 0017 plusmn 0007 minus0160 plusmn 226
01031994 165 plusmn 85 0015 plusmn 0008 0004 plusmn 221
01041994 195 plusmn 96 0018 plusmn 0009 minus0160 plusmn 228
01051994 196 plusmn 78 0018 plusmn 0008 0040 plusmn 229
01211994 190 plusmn 77 0018 plusmn 0008 minus0050 plusmn 239
01221994 165 plusmn 86 0015 plusmn 0008 minus0007 plusmn 233
where P119894119894 119894 = 4 5 6 represents the values of the diagonal
elements of the state covariance matrix of the estimatedvelocity And the residual is given by
Δ120588 = z minus 120588119888
(17)
where z and 120588119888
are the observed and calculated pseudorangemeasurements respectively
5 Results
The algorithm is analyzed and tested using 8 complete days ofdata Figures 2 and 3 show the real and filtered position andvelocity errors in m and ms with SA (Select Availability) offand on respectively These figures show the results for oneday of filtering
Figure 4 shows the typical behavior of the pseudorangeresiduals for all tests
Figures 5 and 6 show the histogram and normal distribu-tion of the residuals
Table 1 shows the statistical error for position and velocityvectors and the residual for all tests
It can be noted that for all days tested the real positionand velocity errors are fewer than with the estimated positionand velocity errors by the filter It shows the conservativebehavior of the filter In all cases the filtering takes aroundone hour to converge Before achieving the convergencethe onboard computer can use the GPS navigation solutionprovided by GPS receiver with 100-meter position error Theposition accuracy with the SA off (11181993 and 11191993)or on (other days) is from 15 to 20m with standard deviationfrom 6 to 10m The velocity accuracy varies from 0014to 0018ms with standard deviation going from 0006 to0009ms as shown in Table 1
Through Figures 5 and 6 and Table 1 it can be notedthat the residuals present normal distributionwithmean zeroand standard deviation of around 23m On November 18and 19 1993 the SA is off and the standard deviation of theresiduals is around 133mThis fact shows how the SA affectsthe statistics of the residuals although the estimated state hadnot been significantly degraded
6 Conclusions
The main goal of this work is to achieve accuracy aroundtens ofmeters alongwithminimumcomputational cost when
Mathematical Problems in Engineering 7
determining in real-time artificial satellite orbits onboardconsidering a simplified model For its development singlefrequency GPS measurements are used considering theeffects of the clock offsets of the GPS and user satellites anduser relativistic effects
This algorithm is tested with real data from a satellite witha GPS receiver onboard The satellite orbit is estimated usingthe developed algorithmwith a good accuracy andminimumcomputational costThe algorithmuses a large 30-second stepsize of propagation (10 seconds step size can be used as well)the geopotential model up to order and degree 10 and thecomputationmethod of the transitionmatrix considering theKeplerian motion The position accuracy obtained is betterthan 20m with the SA on or off The results are according toexpected
Acknowledgments
The authors wish to express their appreciation for the supportprovided by UNESP (Universidade Estadual Paulista ldquoJuliode Mesquita Filhordquo) of Brazil and INPE (Brazilian Institutefor Space Research) They also wish to acknowledge theEnglish language review performed by FDCTndashFoundationfor Scientific and Technological Development
References
[1] L L Fu E J Christensen C A Yamarone Jr et al ldquoTOPEXPOSEIDONmission overviewrdquo Journal of Geophysical Researchvol 99 no 12 pp 24369ndash24381 1994
[2] B Haines W Bertiger S Desai et al ldquoInitial orbit determi-nation results for Jason-1 towards a 1-cm orbitrdquo in Proceedingsof the Institute of Navigation Conference (GPS rsquo02) PortlandOregon USA September 2002
[3] K R Choi J C Ries and B D Tapley ldquoJASON-1 precisionorbit determination by combining SLR and DORIS with GPStracking datardquo Marine Geodesy vol 27 no 1-2 pp 319ndash3312004
[4] S B LuthckeN P ZelenskyDD Rowlands F G Lemoine andT A Williams ldquoThe 1-centimeter orbit Jason-1 precision orbitdetermination using GPS SLR DORIS and altimeter datardquoMarine Geodesy vol 26 no 3-4 pp 399ndash421 2003
[5] Z Kang P Nagel and R Pastor ldquoPrecise orbit determinationfor GRACErdquoAdvances in Space Research vol 31 no 8 pp 1875ndash1881 2003
[6] Z Kang B Tapley S Bettadpur J Ries P Nagel and R PastorldquoPrecise orbit determination for the GRACEmission using onlyGPS datardquo Journal of Geodesy vol 80 no 6 pp 322ndash331 2006
[7] D Kuang Y Bar-Sever W Bertiger et al ldquoPrecision orbitdetermination for CHAMP using GPS data from BlackJackreceiverrdquo in Proceeding of the ION National Technical MeetingLong Beach Calif USA January 2001
[8] S Zhu C Reigber and R Koenig ldquoIntegrated adjustment ofCHAMP GRACE and GPS datardquo Journal of Geodesy vol 78no 1-2 pp 103ndash108 2004
[9] B S Lee J S Lee J H Kim et al ldquoReconstruction ofKOMPSAT-1 GPS navigation solutions using GPS data gener-ation and preprocessing programrdquo Acta Astronautica vol 54no 8 pp 571ndash576 2004
[10] B S Lee J C Yoon Y Hwang and J Kim ldquoOrbit determinationsystem for the KOMPSAT-2 using GPS measurement datardquoActa Astronautica vol 57 no 9 pp 747ndash753 2005
[11] B H Putney J A Marshall R S Nerem et al ldquoPrecise orbitdetermination for the TopexPoseidon missionrdquo in Proceed-ings of the AASAIAA Astrodynamics Conference pp 195ndash212August 1993
[12] C Noll International Laser Ranging Service 2012 httpilrsgsfcnasagovsatellite missionslist of satellitescham generalhtml
[13] E Gill and O Montebruck ldquoComparision of GPS-based orbitdetermination strategiesrdquo in Proceedings of the 18th Interna-tional Symposium on Space Flight Dynamics Munich GermanyOctober 2004
[14] V M Gomes H H Kuga and A P M Chiaradia ldquoReal timeorbit determination using GPS navigation solutionrdquo Journal ofthe Brazilian Society ofMechanical Sciences and Engineering vol29 no 3 pp 274ndash278 2007
[15] P C PM PardalHKKuga andRV deMoraes ldquoImplicationsof the application of recursive least squares algorithms tosatellite orbit determination usingGPSmeasurementsrdquoWSEASTransactions on Systems vol 8 no 3 pp 334ndash343 2009
[16] G J Bierman and C L Thornton ldquoNumerical comparisonof Kalman filter algorithms orbit determination case studyrdquoAutomatica vol 13 no 1 pp 23ndash35 1977
[17] R G Brown and P Y C Hwang ldquoA kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[18] A Gelb J F Kasper Jr R A Nash Jr C F Price and AA Sutherland Jr Applied Optimal Estimation The MIT PressInglaterra UK 1974
[19] P S Maybeck Stochastic Models Estimation and Control vol 1Academic Press New York NY USA 1979
[20] J R Raol and N K Sinha ldquoOn the orbit determination prob-lemrdquo IEEE Transactions on Aerospace and Electronic Systemsvol 21 no 3 pp 274ndash291 1985
[21] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications vol 2 chapter 21 pp p559ndashp592AIAA 1996
[22] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer New York NY USA 2001
[23] H K Kuga Adaptive estimation of orbits applied to low altitudesatellites [MS thesis] INPE Sao Jose dos Campos Brazil 1982INPE-2316-TDL079 in Portuguese
[24] H K Kuga Orbit determination of Earth artificial satellitesthrough state estimation techniques combined with smoothingtechniques [PhD dissertation] INPE Sao Jose dos CamposBrazil 1989 INPE-4959-TDL079 in Portuguese
[25] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[26] S Pines ldquoUniform representation of the gravitational potentialand its derivativesrdquo AIAA Journal vol 11 no 11 pp 1508ndash15111973
[27] A P M Chiaradia H K Kuga and A F B A Prado ldquoInves-tigation on ionospheric correction models for GPS signalsrdquo inAdvances in Space Dynamics A F B A Prado Ed pp 214ndash219Instituto Nacional de Pesquisas Espaciais 2000
[28] A P M Chiaradia E Gill O Montenbruck H K Kuga andA F B A Prado Algorithms for on-Board Orbit Determination
8 Mathematical Problems in Engineering
Using GPSmdashOBODE-GPS DLR Alemanha Germany 2000DLRmdashGSOC TN 00-04
[29] A Leick GPS Satellite Surveying INC John Wiley amp Sons 2ndedition 1995
[30] A P M Chiaradia H K Kuga and A F B A Prado ldquoInvesti-gation of simplifiedmodels for orbit determination using singlefrequency GPS measurementsrdquo Journal of the Brazilian Societyof Mechanical Sciences vol 21 pp 165ndash172 1999
[31] H K Kuga TransitionMatrix of the Elliptical KeplerianMotionINPE Sao Jose dos Campos Brazil 1986 INPE-3779-NTE250in Portuguese
[32] F L Markley ldquoApproximate cartesian state transition matrixrdquoThe Journal of the Astronautical Sciences vol 34 no 12 pp 161ndash169 1986
[33] A P M Chiaradia H K Kuga and A F B A Prado ldquoCom-parison between twomethods to calculate the transitionmatrixof orbit motionrdquo Mathematical Problems in Engineering vol2012 Article ID 768973 12 pages 2012
[34] VM Gomes H K Kuga and A F B A Prado ldquoReal time orbitdetermination with different force fieldsrdquoWSEAS Transactionson Applied and Theoretical Mechanics vol 5 no 1 pp 23ndash322010
[35] V M Gomes A F B A Prado and H K Kuga ldquoLowthrust maneuvers for artificial satellitesrdquo WSEAS Transactionson Applied and Theoretical Mechanics vol 3 no 10 pp 859ndash868 2008
[36] V M Gomes Prado A F B A and H K Kuga ldquoFiltering theGPS navigation solution for real time orbit determination usingdifferent dynamical modelsrdquo in Proceedings of the 5th WSEASInternational Conference on Applied and Theoretical Mechanics(MECHANICS rsquo09) vol 1 pp 1ndash10 Puerto de La Cruz Spain2009
[37] HW Press B P Flannery S A Teukolsky andW T VetterlingNumerical Recipesedition Cambridge University Press 3rdedition 1987
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
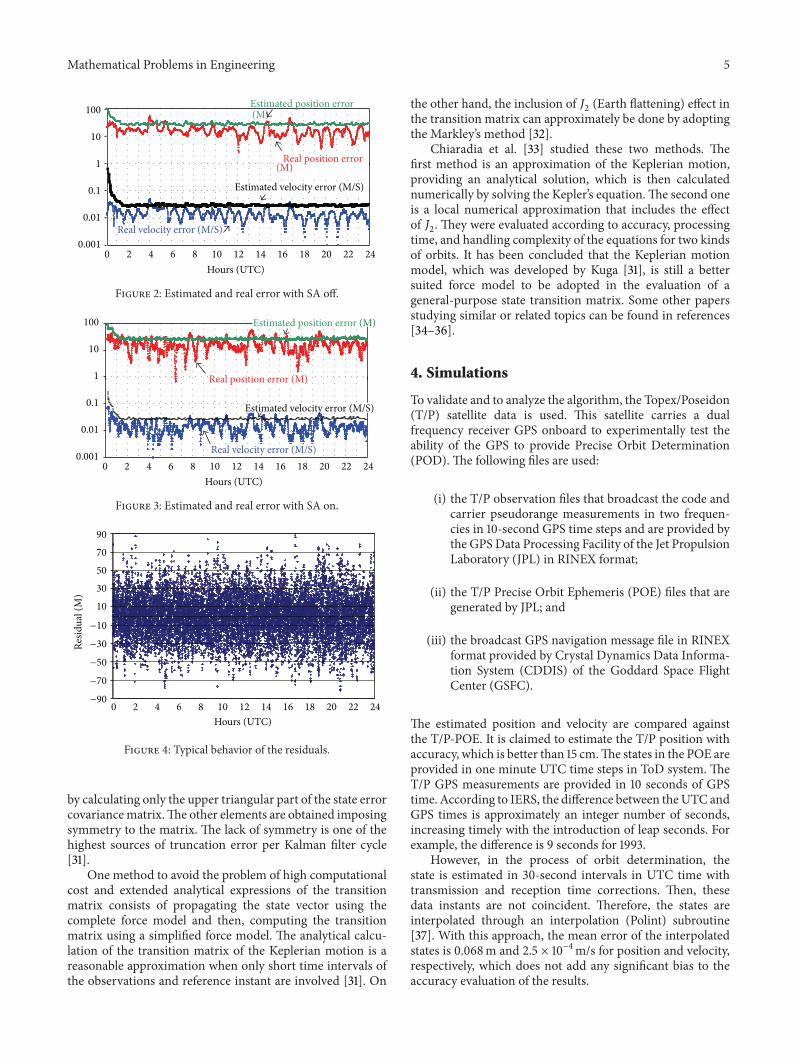
Mathematical Problems in Engineering 5
0001
001
01
1
10
100
0 2 4 6 8 10 12 14 16 18 20 22 24
Estimated position error
Estimated velocity error (MS)
Hours (UTC)
(M)
(M)Real position error
Real velocity error (MS)
Figure 2 Estimated and real error with SA off
0001
001
01
1
10
100
0 2 4 6 8 10 12 14 16 18 20 22 24Hours (UTC)
Estimated position error (M)
Real position error (M)
Estimated velocity error (MS)
Real velocity error (MS)
Figure 3 Estimated and real error with SA on
10
30
50
70
90
0 2 4 6 8 10 12 14 16 18 20 22 24Hours (UTC)
Resid
ual (
M)
minus90
minus70
minus50
minus30
minus10
Figure 4 Typical behavior of the residuals
by calculating only the upper triangular part of the state errorcovariancematrixThe other elements are obtained imposingsymmetry to the matrix The lack of symmetry is one of thehighest sources of truncation error per Kalman filter cycle[31]
One method to avoid the problem of high computationalcost and extended analytical expressions of the transitionmatrix consists of propagating the state vector using thecomplete force model and then computing the transitionmatrix using a simplified force model The analytical calcu-lation of the transition matrix of the Keplerian motion is areasonable approximation when only short time intervals ofthe observations and reference instant are involved [31] On
the other hand the inclusion of 1198692(Earth flattening) effect in
the transition matrix can approximately be done by adoptingthe Markleyrsquos method [32]
Chiaradia et al [33] studied these two methods Thefirst method is an approximation of the Keplerian motionproviding an analytical solution which is then calculatednumerically by solving the Keplerrsquos equationThe second oneis a local numerical approximation that includes the effectof 1198692 They were evaluated according to accuracy processing
time and handling complexity of the equations for two kindsof orbits It has been concluded that the Keplerian motionmodel which was developed by Kuga [31] is still a bettersuited force model to be adopted in the evaluation of ageneral-purpose state transition matrix Some other papersstudying similar or related topics can be found in references[34ndash36]
4 Simulations
To validate and to analyze the algorithm the TopexPoseidon(TP) satellite data is used This satellite carries a dualfrequency receiver GPS onboard to experimentally test theability of the GPS to provide Precise Orbit Determination(POD) The following files are used
(i) the TP observation files that broadcast the code andcarrier pseudorange measurements in two frequen-cies in 10-second GPS time steps and are provided bythe GPSData Processing Facility of the Jet PropulsionLaboratory (JPL) in RINEX format
(ii) the TP Precise Orbit Ephemeris (POE) files that aregenerated by JPL and
(iii) the broadcast GPS navigation message file in RINEXformat provided by Crystal Dynamics Data Informa-tion System (CDDIS) of the Goddard Space FlightCenter (GSFC)
The estimated position and velocity are compared againstthe TP-POE It is claimed to estimate the TP position withaccuracy which is better than 15 cmThe states in the POE areprovided in one minute UTC time steps in ToD system TheTP GPS measurements are provided in 10 seconds of GPStime According to IERS the difference between theUTC andGPS times is approximately an integer number of secondsincreasing timely with the introduction of leap seconds Forexample the difference is 9 seconds for 1993
However in the process of orbit determination thestate is estimated in 30-second intervals in UTC time withtransmission and reception time corrections Then thesedata instants are not coincident Therefore the states areinterpolated through an interpolation (Polint) subroutine[37] With this approach the mean error of the interpolatedstates is 0068m and 25 times 10minus4ms for position and velocityrespectively which does not add any significant bias to theaccuracy evaluation of the results
6 Mathematical Problems in Engineering
0
500
1000
1500
2000
2500
3000
3500
10 30 50 70 90 MaisResidual (M)minus10minus80 minus50 minus30minus100
Figure 5 Histogram of the residuals
00002000400060008001
0012001400160018
002
0 20 40 60 80 100minus20minus80 minus60 minus40minus100Standard deviation of the residuals (M)
Figure 6 Normal distribution of the residuals
Some parameters to be used in evaluating the algorithmin the tests are defined The real position error is given by
Δr equiv [3
sum
119894=1
(119909119894minus 119909119894)2
]
12
(13)
where 119909119894and 119909
119894 119894 = 1 2 3 are the reference components
(or real) and estimated position vectors respectively Theestimated position error is given by
Δr = [3
sum
119894=1
P119894119894]
12
(14)
where P119894119894 119894 = 1 2 3 represents the values of the diagonal
elements of the state covariance matrix of the estimatedposition The real velocity error is given by
Δv equiv [6
sum
119894=4
(119909119894minus 119909119894)2
]
12
(15)
where 119909119894and 119909
119894 119894 = 4 5 6 are the components of the refer-
ence (or real) and estimated velocity vectors respectivelyTheestimated velocity error is given by
Δv = [6
sum
119894=4
P119894119894]
12
(16)
Table 1 Statistical errors with SA on or off
Date Δ119903 (m) Δ119907 (m) Residuals (m)11181993 155 plusmn 68 0014 plusmn 0006 0027 plusmn 132
11191993 174 plusmn 67 0016 plusmn 0006 minus0130 plusmn 134
11201993 176 plusmn 84 0017 plusmn 0007 minus0160 plusmn 226
01031994 165 plusmn 85 0015 plusmn 0008 0004 plusmn 221
01041994 195 plusmn 96 0018 plusmn 0009 minus0160 plusmn 228
01051994 196 plusmn 78 0018 plusmn 0008 0040 plusmn 229
01211994 190 plusmn 77 0018 plusmn 0008 minus0050 plusmn 239
01221994 165 plusmn 86 0015 plusmn 0008 minus0007 plusmn 233
where P119894119894 119894 = 4 5 6 represents the values of the diagonal
elements of the state covariance matrix of the estimatedvelocity And the residual is given by
Δ120588 = z minus 120588119888
(17)
where z and 120588119888
are the observed and calculated pseudorangemeasurements respectively
5 Results
The algorithm is analyzed and tested using 8 complete days ofdata Figures 2 and 3 show the real and filtered position andvelocity errors in m and ms with SA (Select Availability) offand on respectively These figures show the results for oneday of filtering
Figure 4 shows the typical behavior of the pseudorangeresiduals for all tests
Figures 5 and 6 show the histogram and normal distribu-tion of the residuals
Table 1 shows the statistical error for position and velocityvectors and the residual for all tests
It can be noted that for all days tested the real positionand velocity errors are fewer than with the estimated positionand velocity errors by the filter It shows the conservativebehavior of the filter In all cases the filtering takes aroundone hour to converge Before achieving the convergencethe onboard computer can use the GPS navigation solutionprovided by GPS receiver with 100-meter position error Theposition accuracy with the SA off (11181993 and 11191993)or on (other days) is from 15 to 20m with standard deviationfrom 6 to 10m The velocity accuracy varies from 0014to 0018ms with standard deviation going from 0006 to0009ms as shown in Table 1
Through Figures 5 and 6 and Table 1 it can be notedthat the residuals present normal distributionwithmean zeroand standard deviation of around 23m On November 18and 19 1993 the SA is off and the standard deviation of theresiduals is around 133mThis fact shows how the SA affectsthe statistics of the residuals although the estimated state hadnot been significantly degraded
6 Conclusions
The main goal of this work is to achieve accuracy aroundtens ofmeters alongwithminimumcomputational cost when
Mathematical Problems in Engineering 7
determining in real-time artificial satellite orbits onboardconsidering a simplified model For its development singlefrequency GPS measurements are used considering theeffects of the clock offsets of the GPS and user satellites anduser relativistic effects
This algorithm is tested with real data from a satellite witha GPS receiver onboard The satellite orbit is estimated usingthe developed algorithmwith a good accuracy andminimumcomputational costThe algorithmuses a large 30-second stepsize of propagation (10 seconds step size can be used as well)the geopotential model up to order and degree 10 and thecomputationmethod of the transitionmatrix considering theKeplerian motion The position accuracy obtained is betterthan 20m with the SA on or off The results are according toexpected
Acknowledgments
The authors wish to express their appreciation for the supportprovided by UNESP (Universidade Estadual Paulista ldquoJuliode Mesquita Filhordquo) of Brazil and INPE (Brazilian Institutefor Space Research) They also wish to acknowledge theEnglish language review performed by FDCTndashFoundationfor Scientific and Technological Development
References
[1] L L Fu E J Christensen C A Yamarone Jr et al ldquoTOPEXPOSEIDONmission overviewrdquo Journal of Geophysical Researchvol 99 no 12 pp 24369ndash24381 1994
[2] B Haines W Bertiger S Desai et al ldquoInitial orbit determi-nation results for Jason-1 towards a 1-cm orbitrdquo in Proceedingsof the Institute of Navigation Conference (GPS rsquo02) PortlandOregon USA September 2002
[3] K R Choi J C Ries and B D Tapley ldquoJASON-1 precisionorbit determination by combining SLR and DORIS with GPStracking datardquo Marine Geodesy vol 27 no 1-2 pp 319ndash3312004
[4] S B LuthckeN P ZelenskyDD Rowlands F G Lemoine andT A Williams ldquoThe 1-centimeter orbit Jason-1 precision orbitdetermination using GPS SLR DORIS and altimeter datardquoMarine Geodesy vol 26 no 3-4 pp 399ndash421 2003
[5] Z Kang P Nagel and R Pastor ldquoPrecise orbit determinationfor GRACErdquoAdvances in Space Research vol 31 no 8 pp 1875ndash1881 2003
[6] Z Kang B Tapley S Bettadpur J Ries P Nagel and R PastorldquoPrecise orbit determination for the GRACEmission using onlyGPS datardquo Journal of Geodesy vol 80 no 6 pp 322ndash331 2006
[7] D Kuang Y Bar-Sever W Bertiger et al ldquoPrecision orbitdetermination for CHAMP using GPS data from BlackJackreceiverrdquo in Proceeding of the ION National Technical MeetingLong Beach Calif USA January 2001
[8] S Zhu C Reigber and R Koenig ldquoIntegrated adjustment ofCHAMP GRACE and GPS datardquo Journal of Geodesy vol 78no 1-2 pp 103ndash108 2004
[9] B S Lee J S Lee J H Kim et al ldquoReconstruction ofKOMPSAT-1 GPS navigation solutions using GPS data gener-ation and preprocessing programrdquo Acta Astronautica vol 54no 8 pp 571ndash576 2004
[10] B S Lee J C Yoon Y Hwang and J Kim ldquoOrbit determinationsystem for the KOMPSAT-2 using GPS measurement datardquoActa Astronautica vol 57 no 9 pp 747ndash753 2005
[11] B H Putney J A Marshall R S Nerem et al ldquoPrecise orbitdetermination for the TopexPoseidon missionrdquo in Proceed-ings of the AASAIAA Astrodynamics Conference pp 195ndash212August 1993
[12] C Noll International Laser Ranging Service 2012 httpilrsgsfcnasagovsatellite missionslist of satellitescham generalhtml
[13] E Gill and O Montebruck ldquoComparision of GPS-based orbitdetermination strategiesrdquo in Proceedings of the 18th Interna-tional Symposium on Space Flight Dynamics Munich GermanyOctober 2004
[14] V M Gomes H H Kuga and A P M Chiaradia ldquoReal timeorbit determination using GPS navigation solutionrdquo Journal ofthe Brazilian Society ofMechanical Sciences and Engineering vol29 no 3 pp 274ndash278 2007
[15] P C PM PardalHKKuga andRV deMoraes ldquoImplicationsof the application of recursive least squares algorithms tosatellite orbit determination usingGPSmeasurementsrdquoWSEASTransactions on Systems vol 8 no 3 pp 334ndash343 2009
[16] G J Bierman and C L Thornton ldquoNumerical comparisonof Kalman filter algorithms orbit determination case studyrdquoAutomatica vol 13 no 1 pp 23ndash35 1977
[17] R G Brown and P Y C Hwang ldquoA kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[18] A Gelb J F Kasper Jr R A Nash Jr C F Price and AA Sutherland Jr Applied Optimal Estimation The MIT PressInglaterra UK 1974
[19] P S Maybeck Stochastic Models Estimation and Control vol 1Academic Press New York NY USA 1979
[20] J R Raol and N K Sinha ldquoOn the orbit determination prob-lemrdquo IEEE Transactions on Aerospace and Electronic Systemsvol 21 no 3 pp 274ndash291 1985
[21] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications vol 2 chapter 21 pp p559ndashp592AIAA 1996
[22] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer New York NY USA 2001
[23] H K Kuga Adaptive estimation of orbits applied to low altitudesatellites [MS thesis] INPE Sao Jose dos Campos Brazil 1982INPE-2316-TDL079 in Portuguese
[24] H K Kuga Orbit determination of Earth artificial satellitesthrough state estimation techniques combined with smoothingtechniques [PhD dissertation] INPE Sao Jose dos CamposBrazil 1989 INPE-4959-TDL079 in Portuguese
[25] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[26] S Pines ldquoUniform representation of the gravitational potentialand its derivativesrdquo AIAA Journal vol 11 no 11 pp 1508ndash15111973
[27] A P M Chiaradia H K Kuga and A F B A Prado ldquoInves-tigation on ionospheric correction models for GPS signalsrdquo inAdvances in Space Dynamics A F B A Prado Ed pp 214ndash219Instituto Nacional de Pesquisas Espaciais 2000
[28] A P M Chiaradia E Gill O Montenbruck H K Kuga andA F B A Prado Algorithms for on-Board Orbit Determination
8 Mathematical Problems in Engineering
Using GPSmdashOBODE-GPS DLR Alemanha Germany 2000DLRmdashGSOC TN 00-04
[29] A Leick GPS Satellite Surveying INC John Wiley amp Sons 2ndedition 1995
[30] A P M Chiaradia H K Kuga and A F B A Prado ldquoInvesti-gation of simplifiedmodels for orbit determination using singlefrequency GPS measurementsrdquo Journal of the Brazilian Societyof Mechanical Sciences vol 21 pp 165ndash172 1999
[31] H K Kuga TransitionMatrix of the Elliptical KeplerianMotionINPE Sao Jose dos Campos Brazil 1986 INPE-3779-NTE250in Portuguese
[32] F L Markley ldquoApproximate cartesian state transition matrixrdquoThe Journal of the Astronautical Sciences vol 34 no 12 pp 161ndash169 1986
[33] A P M Chiaradia H K Kuga and A F B A Prado ldquoCom-parison between twomethods to calculate the transitionmatrixof orbit motionrdquo Mathematical Problems in Engineering vol2012 Article ID 768973 12 pages 2012
[34] VM Gomes H K Kuga and A F B A Prado ldquoReal time orbitdetermination with different force fieldsrdquoWSEAS Transactionson Applied and Theoretical Mechanics vol 5 no 1 pp 23ndash322010
[35] V M Gomes A F B A Prado and H K Kuga ldquoLowthrust maneuvers for artificial satellitesrdquo WSEAS Transactionson Applied and Theoretical Mechanics vol 3 no 10 pp 859ndash868 2008
[36] V M Gomes Prado A F B A and H K Kuga ldquoFiltering theGPS navigation solution for real time orbit determination usingdifferent dynamical modelsrdquo in Proceedings of the 5th WSEASInternational Conference on Applied and Theoretical Mechanics(MECHANICS rsquo09) vol 1 pp 1ndash10 Puerto de La Cruz Spain2009
[37] HW Press B P Flannery S A Teukolsky andW T VetterlingNumerical Recipesedition Cambridge University Press 3rdedition 1987
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
0
500
1000
1500
2000
2500
3000
3500
10 30 50 70 90 MaisResidual (M)minus10minus80 minus50 minus30minus100
Figure 5 Histogram of the residuals
00002000400060008001
0012001400160018
002
0 20 40 60 80 100minus20minus80 minus60 minus40minus100Standard deviation of the residuals (M)
Figure 6 Normal distribution of the residuals
Some parameters to be used in evaluating the algorithmin the tests are defined The real position error is given by
Δr equiv [3
sum
119894=1
(119909119894minus 119909119894)2
]
12
(13)
where 119909119894and 119909
119894 119894 = 1 2 3 are the reference components
(or real) and estimated position vectors respectively Theestimated position error is given by
Δr = [3
sum
119894=1
P119894119894]
12
(14)
where P119894119894 119894 = 1 2 3 represents the values of the diagonal
elements of the state covariance matrix of the estimatedposition The real velocity error is given by
Δv equiv [6
sum
119894=4
(119909119894minus 119909119894)2
]
12
(15)
where 119909119894and 119909
119894 119894 = 4 5 6 are the components of the refer-
ence (or real) and estimated velocity vectors respectivelyTheestimated velocity error is given by
Δv = [6
sum
119894=4
P119894119894]
12
(16)
Table 1 Statistical errors with SA on or off
Date Δ119903 (m) Δ119907 (m) Residuals (m)11181993 155 plusmn 68 0014 plusmn 0006 0027 plusmn 132
11191993 174 plusmn 67 0016 plusmn 0006 minus0130 plusmn 134
11201993 176 plusmn 84 0017 plusmn 0007 minus0160 plusmn 226
01031994 165 plusmn 85 0015 plusmn 0008 0004 plusmn 221
01041994 195 plusmn 96 0018 plusmn 0009 minus0160 plusmn 228
01051994 196 plusmn 78 0018 plusmn 0008 0040 plusmn 229
01211994 190 plusmn 77 0018 plusmn 0008 minus0050 plusmn 239
01221994 165 plusmn 86 0015 plusmn 0008 minus0007 plusmn 233
where P119894119894 119894 = 4 5 6 represents the values of the diagonal
elements of the state covariance matrix of the estimatedvelocity And the residual is given by
Δ120588 = z minus 120588119888
(17)
where z and 120588119888
are the observed and calculated pseudorangemeasurements respectively
5 Results
The algorithm is analyzed and tested using 8 complete days ofdata Figures 2 and 3 show the real and filtered position andvelocity errors in m and ms with SA (Select Availability) offand on respectively These figures show the results for oneday of filtering
Figure 4 shows the typical behavior of the pseudorangeresiduals for all tests
Figures 5 and 6 show the histogram and normal distribu-tion of the residuals
Table 1 shows the statistical error for position and velocityvectors and the residual for all tests
It can be noted that for all days tested the real positionand velocity errors are fewer than with the estimated positionand velocity errors by the filter It shows the conservativebehavior of the filter In all cases the filtering takes aroundone hour to converge Before achieving the convergencethe onboard computer can use the GPS navigation solutionprovided by GPS receiver with 100-meter position error Theposition accuracy with the SA off (11181993 and 11191993)or on (other days) is from 15 to 20m with standard deviationfrom 6 to 10m The velocity accuracy varies from 0014to 0018ms with standard deviation going from 0006 to0009ms as shown in Table 1
Through Figures 5 and 6 and Table 1 it can be notedthat the residuals present normal distributionwithmean zeroand standard deviation of around 23m On November 18and 19 1993 the SA is off and the standard deviation of theresiduals is around 133mThis fact shows how the SA affectsthe statistics of the residuals although the estimated state hadnot been significantly degraded
6 Conclusions
The main goal of this work is to achieve accuracy aroundtens ofmeters alongwithminimumcomputational cost when
Mathematical Problems in Engineering 7
determining in real-time artificial satellite orbits onboardconsidering a simplified model For its development singlefrequency GPS measurements are used considering theeffects of the clock offsets of the GPS and user satellites anduser relativistic effects
This algorithm is tested with real data from a satellite witha GPS receiver onboard The satellite orbit is estimated usingthe developed algorithmwith a good accuracy andminimumcomputational costThe algorithmuses a large 30-second stepsize of propagation (10 seconds step size can be used as well)the geopotential model up to order and degree 10 and thecomputationmethod of the transitionmatrix considering theKeplerian motion The position accuracy obtained is betterthan 20m with the SA on or off The results are according toexpected
Acknowledgments
The authors wish to express their appreciation for the supportprovided by UNESP (Universidade Estadual Paulista ldquoJuliode Mesquita Filhordquo) of Brazil and INPE (Brazilian Institutefor Space Research) They also wish to acknowledge theEnglish language review performed by FDCTndashFoundationfor Scientific and Technological Development
References
[1] L L Fu E J Christensen C A Yamarone Jr et al ldquoTOPEXPOSEIDONmission overviewrdquo Journal of Geophysical Researchvol 99 no 12 pp 24369ndash24381 1994
[2] B Haines W Bertiger S Desai et al ldquoInitial orbit determi-nation results for Jason-1 towards a 1-cm orbitrdquo in Proceedingsof the Institute of Navigation Conference (GPS rsquo02) PortlandOregon USA September 2002
[3] K R Choi J C Ries and B D Tapley ldquoJASON-1 precisionorbit determination by combining SLR and DORIS with GPStracking datardquo Marine Geodesy vol 27 no 1-2 pp 319ndash3312004
[4] S B LuthckeN P ZelenskyDD Rowlands F G Lemoine andT A Williams ldquoThe 1-centimeter orbit Jason-1 precision orbitdetermination using GPS SLR DORIS and altimeter datardquoMarine Geodesy vol 26 no 3-4 pp 399ndash421 2003
[5] Z Kang P Nagel and R Pastor ldquoPrecise orbit determinationfor GRACErdquoAdvances in Space Research vol 31 no 8 pp 1875ndash1881 2003
[6] Z Kang B Tapley S Bettadpur J Ries P Nagel and R PastorldquoPrecise orbit determination for the GRACEmission using onlyGPS datardquo Journal of Geodesy vol 80 no 6 pp 322ndash331 2006
[7] D Kuang Y Bar-Sever W Bertiger et al ldquoPrecision orbitdetermination for CHAMP using GPS data from BlackJackreceiverrdquo in Proceeding of the ION National Technical MeetingLong Beach Calif USA January 2001
[8] S Zhu C Reigber and R Koenig ldquoIntegrated adjustment ofCHAMP GRACE and GPS datardquo Journal of Geodesy vol 78no 1-2 pp 103ndash108 2004
[9] B S Lee J S Lee J H Kim et al ldquoReconstruction ofKOMPSAT-1 GPS navigation solutions using GPS data gener-ation and preprocessing programrdquo Acta Astronautica vol 54no 8 pp 571ndash576 2004
[10] B S Lee J C Yoon Y Hwang and J Kim ldquoOrbit determinationsystem for the KOMPSAT-2 using GPS measurement datardquoActa Astronautica vol 57 no 9 pp 747ndash753 2005
[11] B H Putney J A Marshall R S Nerem et al ldquoPrecise orbitdetermination for the TopexPoseidon missionrdquo in Proceed-ings of the AASAIAA Astrodynamics Conference pp 195ndash212August 1993
[12] C Noll International Laser Ranging Service 2012 httpilrsgsfcnasagovsatellite missionslist of satellitescham generalhtml
[13] E Gill and O Montebruck ldquoComparision of GPS-based orbitdetermination strategiesrdquo in Proceedings of the 18th Interna-tional Symposium on Space Flight Dynamics Munich GermanyOctober 2004
[14] V M Gomes H H Kuga and A P M Chiaradia ldquoReal timeorbit determination using GPS navigation solutionrdquo Journal ofthe Brazilian Society ofMechanical Sciences and Engineering vol29 no 3 pp 274ndash278 2007
[15] P C PM PardalHKKuga andRV deMoraes ldquoImplicationsof the application of recursive least squares algorithms tosatellite orbit determination usingGPSmeasurementsrdquoWSEASTransactions on Systems vol 8 no 3 pp 334ndash343 2009
[16] G J Bierman and C L Thornton ldquoNumerical comparisonof Kalman filter algorithms orbit determination case studyrdquoAutomatica vol 13 no 1 pp 23ndash35 1977
[17] R G Brown and P Y C Hwang ldquoA kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[18] A Gelb J F Kasper Jr R A Nash Jr C F Price and AA Sutherland Jr Applied Optimal Estimation The MIT PressInglaterra UK 1974
[19] P S Maybeck Stochastic Models Estimation and Control vol 1Academic Press New York NY USA 1979
[20] J R Raol and N K Sinha ldquoOn the orbit determination prob-lemrdquo IEEE Transactions on Aerospace and Electronic Systemsvol 21 no 3 pp 274ndash291 1985
[21] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications vol 2 chapter 21 pp p559ndashp592AIAA 1996
[22] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer New York NY USA 2001
[23] H K Kuga Adaptive estimation of orbits applied to low altitudesatellites [MS thesis] INPE Sao Jose dos Campos Brazil 1982INPE-2316-TDL079 in Portuguese
[24] H K Kuga Orbit determination of Earth artificial satellitesthrough state estimation techniques combined with smoothingtechniques [PhD dissertation] INPE Sao Jose dos CamposBrazil 1989 INPE-4959-TDL079 in Portuguese
[25] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[26] S Pines ldquoUniform representation of the gravitational potentialand its derivativesrdquo AIAA Journal vol 11 no 11 pp 1508ndash15111973
[27] A P M Chiaradia H K Kuga and A F B A Prado ldquoInves-tigation on ionospheric correction models for GPS signalsrdquo inAdvances in Space Dynamics A F B A Prado Ed pp 214ndash219Instituto Nacional de Pesquisas Espaciais 2000
[28] A P M Chiaradia E Gill O Montenbruck H K Kuga andA F B A Prado Algorithms for on-Board Orbit Determination
8 Mathematical Problems in Engineering
Using GPSmdashOBODE-GPS DLR Alemanha Germany 2000DLRmdashGSOC TN 00-04
[29] A Leick GPS Satellite Surveying INC John Wiley amp Sons 2ndedition 1995
[30] A P M Chiaradia H K Kuga and A F B A Prado ldquoInvesti-gation of simplifiedmodels for orbit determination using singlefrequency GPS measurementsrdquo Journal of the Brazilian Societyof Mechanical Sciences vol 21 pp 165ndash172 1999
[31] H K Kuga TransitionMatrix of the Elliptical KeplerianMotionINPE Sao Jose dos Campos Brazil 1986 INPE-3779-NTE250in Portuguese
[32] F L Markley ldquoApproximate cartesian state transition matrixrdquoThe Journal of the Astronautical Sciences vol 34 no 12 pp 161ndash169 1986
[33] A P M Chiaradia H K Kuga and A F B A Prado ldquoCom-parison between twomethods to calculate the transitionmatrixof orbit motionrdquo Mathematical Problems in Engineering vol2012 Article ID 768973 12 pages 2012
[34] VM Gomes H K Kuga and A F B A Prado ldquoReal time orbitdetermination with different force fieldsrdquoWSEAS Transactionson Applied and Theoretical Mechanics vol 5 no 1 pp 23ndash322010
[35] V M Gomes A F B A Prado and H K Kuga ldquoLowthrust maneuvers for artificial satellitesrdquo WSEAS Transactionson Applied and Theoretical Mechanics vol 3 no 10 pp 859ndash868 2008
[36] V M Gomes Prado A F B A and H K Kuga ldquoFiltering theGPS navigation solution for real time orbit determination usingdifferent dynamical modelsrdquo in Proceedings of the 5th WSEASInternational Conference on Applied and Theoretical Mechanics(MECHANICS rsquo09) vol 1 pp 1ndash10 Puerto de La Cruz Spain2009
[37] HW Press B P Flannery S A Teukolsky andW T VetterlingNumerical Recipesedition Cambridge University Press 3rdedition 1987
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
determining in real-time artificial satellite orbits onboardconsidering a simplified model For its development singlefrequency GPS measurements are used considering theeffects of the clock offsets of the GPS and user satellites anduser relativistic effects
This algorithm is tested with real data from a satellite witha GPS receiver onboard The satellite orbit is estimated usingthe developed algorithmwith a good accuracy andminimumcomputational costThe algorithmuses a large 30-second stepsize of propagation (10 seconds step size can be used as well)the geopotential model up to order and degree 10 and thecomputationmethod of the transitionmatrix considering theKeplerian motion The position accuracy obtained is betterthan 20m with the SA on or off The results are according toexpected
Acknowledgments
The authors wish to express their appreciation for the supportprovided by UNESP (Universidade Estadual Paulista ldquoJuliode Mesquita Filhordquo) of Brazil and INPE (Brazilian Institutefor Space Research) They also wish to acknowledge theEnglish language review performed by FDCTndashFoundationfor Scientific and Technological Development
References
[1] L L Fu E J Christensen C A Yamarone Jr et al ldquoTOPEXPOSEIDONmission overviewrdquo Journal of Geophysical Researchvol 99 no 12 pp 24369ndash24381 1994
[2] B Haines W Bertiger S Desai et al ldquoInitial orbit determi-nation results for Jason-1 towards a 1-cm orbitrdquo in Proceedingsof the Institute of Navigation Conference (GPS rsquo02) PortlandOregon USA September 2002
[3] K R Choi J C Ries and B D Tapley ldquoJASON-1 precisionorbit determination by combining SLR and DORIS with GPStracking datardquo Marine Geodesy vol 27 no 1-2 pp 319ndash3312004
[4] S B LuthckeN P ZelenskyDD Rowlands F G Lemoine andT A Williams ldquoThe 1-centimeter orbit Jason-1 precision orbitdetermination using GPS SLR DORIS and altimeter datardquoMarine Geodesy vol 26 no 3-4 pp 399ndash421 2003
[5] Z Kang P Nagel and R Pastor ldquoPrecise orbit determinationfor GRACErdquoAdvances in Space Research vol 31 no 8 pp 1875ndash1881 2003
[6] Z Kang B Tapley S Bettadpur J Ries P Nagel and R PastorldquoPrecise orbit determination for the GRACEmission using onlyGPS datardquo Journal of Geodesy vol 80 no 6 pp 322ndash331 2006
[7] D Kuang Y Bar-Sever W Bertiger et al ldquoPrecision orbitdetermination for CHAMP using GPS data from BlackJackreceiverrdquo in Proceeding of the ION National Technical MeetingLong Beach Calif USA January 2001
[8] S Zhu C Reigber and R Koenig ldquoIntegrated adjustment ofCHAMP GRACE and GPS datardquo Journal of Geodesy vol 78no 1-2 pp 103ndash108 2004
[9] B S Lee J S Lee J H Kim et al ldquoReconstruction ofKOMPSAT-1 GPS navigation solutions using GPS data gener-ation and preprocessing programrdquo Acta Astronautica vol 54no 8 pp 571ndash576 2004
[10] B S Lee J C Yoon Y Hwang and J Kim ldquoOrbit determinationsystem for the KOMPSAT-2 using GPS measurement datardquoActa Astronautica vol 57 no 9 pp 747ndash753 2005
[11] B H Putney J A Marshall R S Nerem et al ldquoPrecise orbitdetermination for the TopexPoseidon missionrdquo in Proceed-ings of the AASAIAA Astrodynamics Conference pp 195ndash212August 1993
[12] C Noll International Laser Ranging Service 2012 httpilrsgsfcnasagovsatellite missionslist of satellitescham generalhtml
[13] E Gill and O Montebruck ldquoComparision of GPS-based orbitdetermination strategiesrdquo in Proceedings of the 18th Interna-tional Symposium on Space Flight Dynamics Munich GermanyOctober 2004
[14] V M Gomes H H Kuga and A P M Chiaradia ldquoReal timeorbit determination using GPS navigation solutionrdquo Journal ofthe Brazilian Society ofMechanical Sciences and Engineering vol29 no 3 pp 274ndash278 2007
[15] P C PM PardalHKKuga andRV deMoraes ldquoImplicationsof the application of recursive least squares algorithms tosatellite orbit determination usingGPSmeasurementsrdquoWSEASTransactions on Systems vol 8 no 3 pp 334ndash343 2009
[16] G J Bierman and C L Thornton ldquoNumerical comparisonof Kalman filter algorithms orbit determination case studyrdquoAutomatica vol 13 no 1 pp 23ndash35 1977
[17] R G Brown and P Y C Hwang ldquoA kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[18] A Gelb J F Kasper Jr R A Nash Jr C F Price and AA Sutherland Jr Applied Optimal Estimation The MIT PressInglaterra UK 1974
[19] P S Maybeck Stochastic Models Estimation and Control vol 1Academic Press New York NY USA 1979
[20] J R Raol and N K Sinha ldquoOn the orbit determination prob-lemrdquo IEEE Transactions on Aerospace and Electronic Systemsvol 21 no 3 pp 274ndash291 1985
[21] T P Yunck ldquoOrbit determinationrdquo inGlobal Positioning SystemTheory and Applications vol 2 chapter 21 pp p559ndashp592AIAA 1996
[22] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer New York NY USA 2001
[23] H K Kuga Adaptive estimation of orbits applied to low altitudesatellites [MS thesis] INPE Sao Jose dos Campos Brazil 1982INPE-2316-TDL079 in Portuguese
[24] H K Kuga Orbit determination of Earth artificial satellitesthrough state estimation techniques combined with smoothingtechniques [PhD dissertation] INPE Sao Jose dos CamposBrazil 1989 INPE-4959-TDL079 in Portuguese
[25] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[26] S Pines ldquoUniform representation of the gravitational potentialand its derivativesrdquo AIAA Journal vol 11 no 11 pp 1508ndash15111973
[27] A P M Chiaradia H K Kuga and A F B A Prado ldquoInves-tigation on ionospheric correction models for GPS signalsrdquo inAdvances in Space Dynamics A F B A Prado Ed pp 214ndash219Instituto Nacional de Pesquisas Espaciais 2000
[28] A P M Chiaradia E Gill O Montenbruck H K Kuga andA F B A Prado Algorithms for on-Board Orbit Determination
8 Mathematical Problems in Engineering
Using GPSmdashOBODE-GPS DLR Alemanha Germany 2000DLRmdashGSOC TN 00-04
[29] A Leick GPS Satellite Surveying INC John Wiley amp Sons 2ndedition 1995
[30] A P M Chiaradia H K Kuga and A F B A Prado ldquoInvesti-gation of simplifiedmodels for orbit determination using singlefrequency GPS measurementsrdquo Journal of the Brazilian Societyof Mechanical Sciences vol 21 pp 165ndash172 1999
[31] H K Kuga TransitionMatrix of the Elliptical KeplerianMotionINPE Sao Jose dos Campos Brazil 1986 INPE-3779-NTE250in Portuguese
[32] F L Markley ldquoApproximate cartesian state transition matrixrdquoThe Journal of the Astronautical Sciences vol 34 no 12 pp 161ndash169 1986
[33] A P M Chiaradia H K Kuga and A F B A Prado ldquoCom-parison between twomethods to calculate the transitionmatrixof orbit motionrdquo Mathematical Problems in Engineering vol2012 Article ID 768973 12 pages 2012
[34] VM Gomes H K Kuga and A F B A Prado ldquoReal time orbitdetermination with different force fieldsrdquoWSEAS Transactionson Applied and Theoretical Mechanics vol 5 no 1 pp 23ndash322010
[35] V M Gomes A F B A Prado and H K Kuga ldquoLowthrust maneuvers for artificial satellitesrdquo WSEAS Transactionson Applied and Theoretical Mechanics vol 3 no 10 pp 859ndash868 2008
[36] V M Gomes Prado A F B A and H K Kuga ldquoFiltering theGPS navigation solution for real time orbit determination usingdifferent dynamical modelsrdquo in Proceedings of the 5th WSEASInternational Conference on Applied and Theoretical Mechanics(MECHANICS rsquo09) vol 1 pp 1ndash10 Puerto de La Cruz Spain2009
[37] HW Press B P Flannery S A Teukolsky andW T VetterlingNumerical Recipesedition Cambridge University Press 3rdedition 1987
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Using GPSmdashOBODE-GPS DLR Alemanha Germany 2000DLRmdashGSOC TN 00-04
[29] A Leick GPS Satellite Surveying INC John Wiley amp Sons 2ndedition 1995
[30] A P M Chiaradia H K Kuga and A F B A Prado ldquoInvesti-gation of simplifiedmodels for orbit determination using singlefrequency GPS measurementsrdquo Journal of the Brazilian Societyof Mechanical Sciences vol 21 pp 165ndash172 1999
[31] H K Kuga TransitionMatrix of the Elliptical KeplerianMotionINPE Sao Jose dos Campos Brazil 1986 INPE-3779-NTE250in Portuguese
[32] F L Markley ldquoApproximate cartesian state transition matrixrdquoThe Journal of the Astronautical Sciences vol 34 no 12 pp 161ndash169 1986
[33] A P M Chiaradia H K Kuga and A F B A Prado ldquoCom-parison between twomethods to calculate the transitionmatrixof orbit motionrdquo Mathematical Problems in Engineering vol2012 Article ID 768973 12 pages 2012
[34] VM Gomes H K Kuga and A F B A Prado ldquoReal time orbitdetermination with different force fieldsrdquoWSEAS Transactionson Applied and Theoretical Mechanics vol 5 no 1 pp 23ndash322010
[35] V M Gomes A F B A Prado and H K Kuga ldquoLowthrust maneuvers for artificial satellitesrdquo WSEAS Transactionson Applied and Theoretical Mechanics vol 3 no 10 pp 859ndash868 2008
[36] V M Gomes Prado A F B A and H K Kuga ldquoFiltering theGPS navigation solution for real time orbit determination usingdifferent dynamical modelsrdquo in Proceedings of the 5th WSEASInternational Conference on Applied and Theoretical Mechanics(MECHANICS rsquo09) vol 1 pp 1ndash10 Puerto de La Cruz Spain2009
[37] HW Press B P Flannery S A Teukolsky andW T VetterlingNumerical Recipesedition Cambridge University Press 3rdedition 1987
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of