research article a novel method for acquiring engineering...
TRANSCRIPT

Research ArticleA Novel Method for Acquiring Engineering-OrientedOperational Empirical Knowledge
Lijun Liu Zuhua Jiang Bo Song Hongyuan Zhu and Xinyu Li
Department of Industrial Engineering Shanghai Jiao Tong University 800 Dongchuan Road Minhang DistrictShanghai 200240 China
Correspondence should be addressed to Zuhua Jiang zhjiangsjtueducn
Received 26 September 2015 Revised 26 January 2016 Accepted 16 February 2016
Academic Editor Vincent Hilaire
Copyright copy 2016 Lijun Liu et alThis is an open access article distributed under the Creative CommonsAttribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The operational knowledge of skilled technicians gained from years of experience is invaluable for an enterprise Possession ofsuch knowledge will facilitate an enterprise sharing technicianrsquos know-how and training of new employees effectively Howeveruntil now there is rare efficient quantitative method to obtain this kind of tacit knowledge In this paper we propose a concept ofengineering-oriented operational empirical knowledge (OEK) to describe this kind of knowledge anddesign a framework to acquireOEK from skilled technicianrsquos operations The framework integrates motion analysis motion elicitation and intent analysis Themodular arrangement of predetermined time standards (MODAPTS) is used to divide the technicianrsquos operational process intobasic motion elements and the variable precision rough set (VPRS) algorithm is used to extract the technicianrsquos OEK contentwhich combined with the technicianrsquos intent elicited via interview the completed OEK is obtained At the end of our study anengineering case is used to validate the feasibility of the proposed method which shows that satisfactory results have been reachedfor the study
1 Introduction
Years of experience in an operational work can bring atechnician much know-how for accomplishing the tasks effi-ciently The operational know-how of the skilled technicianis of great importance for an enterprise which often hasnew workers to train and need to update the workflow toincrease productivity [1 2] With the operational know-howtransferred to novice the novice can improve his opera-tional skills and then increase manufacturing productivityand product quality However the operational know-howhas not been sufficiently harnessed due to the lack of anefficient knowledge acquisition method [3ndash5] Therefore itis imperative to develop an efficient acquisition method forsuch knowledge acquisition
Operational know-how is regarded as a kind of tacitknowledge which is hard to formalize communicate andshare with others [6] The transformation from tacit knowl-edge to explicit knowledge is a challenging task Moreovermany of tacit knowledge acquisition approaches are based onthe literal documents for the documents might be suitable
for explanation of procedure However it is very rare toexplain the secret of the technical operation which the skilledtechnicians haveThe acquisition of operational know-how ismore difficult compared to the acquisition of tacit knowledgebased on the literal documents
In the existing literatures apprenticeship and observa-tion are the most useful methods to acquire operationalknow-how [3] Apprenticeship is formal arrangements wherespecialized knowledge or skill from a domain expert ispassed to a novice The novice can acquire the same levelof competence as the expert after extensively practicing theskill for a prescribed period of time [7] Observation isalso recognized as a valuable form of acquiring operationalknowledge [8] By observing the actions of an expert theobserver gains insights into expertrsquos practices and builds hispersonal knowledge base For example in order to obtainan experienced bakerrsquos operating technique the employeesof Panasonic worked together with the skilled baker for along time observing and imitating the bakerrsquos motion Even-tually the employees obtained the bakerrsquos operational know-how However apprenticeship and observation belong to the
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2016 Article ID 9754298 19 pageshttpdxdoiorg10115520169754298
2 Mathematical Problems in Engineering
qualitative methods The disadvantages of these methodsare obvious they are inefficient time-consuming and notreplicable for different acquisition results will occur due todifferent cognition and learning modes of observers There-fore development of an efficient and quantitative method toelicit operational know-how becomes an emergent task in thefield of knowledge management
Aiming at the obstacles in the field of engineering-oriented operational know-how acquisition we proposea concept of engineering-oriented operational empiricalknowledge (OEK) to describe this kind of knowledge andthen present an explicit definition and the representationof engineering-oriented OEK A novel OEK acquisition(OEKA) framework is provided in our study which cancomplete the transformation from technicianrsquos operationalmotion to the structured OEKThe OEKA integrates motionanalysis motion elicitation and intent analysis First theworkerrsquos specific operation process is divided into basicmotion elements by means of modular arrangement of pre-determined time standards (MODAPTS) which is a systemused to analyze the performance of manual work [9] Secondwe combine the motion elements with scenario factors toestablish the scenario model and then the algorithm ofvariable precision rough set (VPRS) is used to extract thecritical motion of skilled technicians Third the skilledtechnicianrsquos intent behind theOEK content is elicited with theaid of interview At last the structured representation of OEKis constructed in the postprocessing
Our contribution in this work is threefold
(1) We define the concept of engineering-oriented OEKand provide the structured representation of OEK
(2) We propose an integrated OEK acquisition frame-work integrating motion analysis motion elicitationand intent analysis by which empirical knowledge inthe engineerrsquos operation can be obtained
(3) We demonstrate that the extracted OEK can capturethe technical know-how and can be used for novicesrsquoskill training
The rest of the paper is organized as follows we firstreview the related works in Section 2 In Section 3 we definethe concept of OEK and then provide the representationmodel of OEK In Section 4 we present the OEK acquisitionmethod and its advantage Section 5 describes the completeprocess of OEK acquisition Section 6 provides a detailedcase study The comparison of our method with some relatedworks is discussed in Section 7 Conclusions and futurestudies are outlined in the last section
2 Related Works
21 Tacit Knowledge and Tacit Knowledge AcquisitionKnowledge tied to the senses physical experiences move-ment skills intuition unarticulated mental models orimplicit rules of thumb is tacit [18 19] Tacit knowledge isrooted in the action procedures routines ideals commit-ment and emotion which makes it differ from the explicitknowledge that can be uttered and obtained as drawing and
writing Individuals with tacit knowledge are often unawareof what they possess and how valuable they are for others
Tacit knowledge acquisition means eliciting tacit knowl-edge from various knowledge sources and representing it inthe right form in order to share the knowledge among orga-nizational members and reuse it [20 21] Up till now manytacit knowledge extractionmethods have been developed andapplied in the fields of software engineering manufacturingengineering and health care [22 23] Many of these methodsare based on literal documents And with the developmentof natural language processing machine learning the tacitknowledge acquisitionmethods based on document aremoreand more efficient and valuable
Although the methods based on literal document aresuitable for acquiring the explanation of procedures theyare difficult to acquire the essence of the operational know-how [24] In addition traditional knowledge extractiontechniques work well in eliciting tacit knowledge in literaldocuments They do not elicit the intent of the documentsHowever intent is an indispensable part of tacit knowledgethe intent elicitation should be integrated in the tacit knowl-edge acquisition method [25]
22 Operational Know-How and Knowledge AcquisitionOperational know-how is regarded as a kind of tacit knowl-edge [5] Such knowledge does not originate from theliterature or documents identified as explicit knowledgebut originates from the experience of an individual [26]Consequently it is difficult to be expressed and transferred[27 28]
Many scholars have committed to obtaining the opera-tional know-how and proposed many acquisition models ormethods In Table 1 the existing literatures about operationalknow-how acquisition are analyzed from the perspectivesof method description qualitative or quantitative object ofextraction applied technology application field and draw-back
These methods are divided into three types qualitativemethod quantitative method and mixed method
Observation and apprenticeship are classic qualitativemethods for extracting the operational know-how of skilledtechnicians [3] Observation is recognized as a valuable formof learning according to the social cognitive theory [8] Theobserver gains insights into the skilled techniciansrsquo practicesand builds his personal knowledge base by observing theactions of the expert [29] Apprenticeship is formal arrange-ments where specialized knowledge or skill from a domainexpert is passed to a novice The novice will acquire thesame level of competence as the expert after extensivelypracticing the skill for a prescribed period of time [7] Thesequalitative acquisition methods are successful at transferringthe operational know-how from experts to novices and arethe focus of earlier literatures However these methods haveobvious drawbacks such as the time-consuming and theinconsistent acquisition results for the different cognition andlearning modes of learners
The quantitativemethod of operational know-how acqui-sition is another type in which the specific algorithm ortool is used to elicit the operational know-how Nakagawa
Mathematical Problems in Engineering 3
Table 1 Related literaturesrsquo analysis
Literature Methoddescription
Qualitative orquantitative
Object ofextraction
Appliedtechnology Application field Drawback
Bandura [8] andNonaka [10] Observation Qualitative
methodActions of
domain expert Observe Manual workInconsistentacquisitionresults
Collis et al [7 11] Apprenticeship Qualitativemethod
Specializedknowledge orskill of domain
expert
Extensivelypracticing the
skillNot limited
Time-consuming andinconsistentacquisitionresults
Hashimoto et al[12] and Yoshida etal [5]
Personal motionsensing Mixed method
Skilledoperations of
skilledtechnicians
Field-orientedinterview
human motioncapture andvideo analysis
Manufacturingindustry
Depends on theinterviewseriously
Watanuki [13] Method of skillstransfer
Qualitativemethod
Castingtechnologiesand skills of
skilledtechnicians
Sharing a ldquobardquo(place) usingmultimedia
technology andvirtual realitytechnology
Manufacturingskills training
Therepresentationof knowledge is
vague
Nakagawa et al[14] and Huang etal [15]
Skill educationservice
Quantitativemethod
Extract skillsfrom nursing
motion (focusedon bed caremotion)
Nursing skill isextracted frominterview andvideo analysisThe extractedskills areassessed
quantitatively
Nurse and careworker
It is difficult toformally
represent suchknowledge
Li et al [16] andNguyen and Zhang[2]
Mobility andphysical activity
sensingMixed method
Nursesfirefighterswaiters
housekeepersor janitors
Extracthigh-level
knowledge rulesfrom low levelsensor signalsby means of anunsupervisedapproach
Service
Aiming at theactivities of
person lackingdetailed motion
Mitsuhashi et al[17]
Motion curvedsurface analysisand composite
Quantitativemethod Skill succession
Track the wholejoint motion by
means ofmotion curvedsurfaces andconfirm the
validity of skillsuccession by
skeleton motionmovie and
curved surface
Sports andentertainment
motion
Lackingaccurate
description ofthe motionsequences
et al [14] extracted nursing skills by analyzing the bodyfoot and muscle activities of experts and nonexperts andthen developed a novel skill education service for nursingMitsuhashi et al [17] tracked the whole joint motion bymeans of motion curved surfaces and confirmed the validityof skill succession by skeleton motion movie and curvedsurface This method was used to elicit the know-how ofsports and entertainment motion The quantitative methodcan analyze the motion and behavior of person accurately
However the empirical knowledge representation in themethod is somewhat weak
The mixed method is an integrated framework includingqualitative and quantitative methods Yoshida et al [5]presented a mixed method to extract the tacit knowledgeconsisting of the skilled operations of skilled technicians inthe manufacturing industry The method comprises threeaspects the field-oriented interview the human motion cap-ture and the video analysis However this method depends
4 Mathematical Problems in Engineering
(a) Motion combanation (b) Motion sequence
Figure 1 Examples of motion combanition and motion sequence
on the interview seriously and may reduce the effectivenessof knowledge acquisition Nguyen and Zhang [2] extractedhigh-level knowledge rules from low level sensor signals bymeans of an unsupervised approach in the service Theirstudy focused on the activities of person and lacked explicitmotion descriptionThemixed method integrates the advan-tages of qualitative and quantitative methods and may besuitable to obtain the operational know-how of experts
In summary the explicit definition and representationof engineering-oriented operational knowledge are absent inthe existing literatures Such reasons have limited the devel-opment of standardized and effective knowledge acquisitionapproach Our study aims to overcome these obstacles andpresent a novel and useful knowledge acquisition frameworkby means of mixed method In the next section the formaldefinition and representation of OEK are introduced
3 Definition and Representation of OEK
31 Definition of OEK In this paper the engineering-oriented OEK is defined as follows
Engineering-oriented OEK is the operational know-how comprising the specific motion combination motionsequence formed during the repeated practice and thinkingof an individual which are of value for bettering the produc-tion process
In the manufacturing process some manual operationsare very simple For example in the drilling operation anoperator only repeats the simple motion combination ldquopulland pushrdquo as shown in Figure 1(a) In other cases theoperation can be more complex For example in the moldingoperation shown in Figure 1(b) the operator uses his lefthand to grasp a number of parts placing them into a moldand rowing them against the mold while his right handoperates the machine When the molding is finished theoperator removes the completed artifact Such a complexmotion sequence includes a series of motion elements
32 Interpretation of OEK Definition Some key concepts inthe definition of OEK are explained as follows
(1) Operational Know-How Knowledge Operational know-how knowledge is the special knowledge that facilitates
efficient engineering operationsThis kind of knowledge doesnot originate from the literature or documents but originatesfrom skilled techniciansrsquo experience [26]
(2) Motion Combination Motion combination is the integra-tion of a series of basic operational motion elements withoutpause Motion combination is a basic form of the content ofOEK This kind of OEK comes from an individualrsquos repeatedpractice and thinking which are the most effective andconvenient motions for the specific operation For examplea proficient welding operator would use some particularmotion combination in the welding process which enablesthe operator to finish the production with high quality andquick speed
The motion combination is formalized as follows
119872119888= 11989811198982sdot sdot sdot 119898119899 (1)
where119872119888denotes the motion combination and119898
119899is a basic
motion element
(3) Motion Sequence A motion sequence is an ordered setof several motion combinations where the pause betweenmotion combinations is permitted As another form of thecontent of OEK the motion sequence represents a completeoperationmethod withwhich a skilled operator conducts themost effective operation process
The motion sequence is formalized as follows
119872119904= 11989811988611198981198862sdot sdot sdot 119898119886119895 or 119898
11988711198981198872sdot sdot sdot 119898119887119896 or sdot sdot sdot
or 11989811988911198981198892sdot sdot sdot 119898119889119897
(2)
where119872119904denotes the motion sequence 119898
119894119899119894 = 119886 119887 119889
is a basic motion element and 11989811988611198981198862sdot sdot sdot 119898119886119895 is a motion
combination
33 Representation of Engineering-OrientedOEK Knowledgeacquisition is closely related with knowledge representationfor the manipulation of acquired knowledge largely dependson how the knowledge is represented to reflect domainexpertsrsquo mental model and problem solving process [30]The main body of OEK representation is OEK contentincorporating the motion combination andmotion sequence
Mathematical Problems in Engineering 5
OEK sources identification
Human motion analysis
Scenario model establishment
Obtaining initial OEK
Structured OEK
Specific operation process
MODAPTS
Start
End
Variable precision rough set
Video analysis
Interview analysis
Motion modeling
Motion eliciting
Intent eliciting
Acquisition toolAcquisition processAcquisition phase
Intent analysis
Postprocessing
OEK sources
Figure 2 Multistage OEK acquisition framework
obtained from a skilled technician Besides this since OEKis related with the specific operation process and problemscenarios it is indispensable to integrate the scenarios intoOEK representation [22 23] The operatorrsquos intent assumesa driving role of the motions so it should be consideredin the representation of OEK Moreover the OEK obtainedfrom an individual experience is not always reliable so acredibility score should be given to indicate the reliability ofOEK Taking the above factors into account a complete OEKrepresentation should include the problem scenarios con-tributorrsquos information core content intent and creditabilityas shown in the following formula
⟨OEK⟩ = ⟨problem scenarios contributor content
intent creditability⟩ (3)
4 Methodology
In many cases skilled technicians are not aware of theOEK they possess and how this knowledge can be sharedwith others In the problem solving the technicianrsquos OEKis activated by the factors of problem context to realize thespecific intent In our study not only the know-how in themotion but also the intent behind the specific motion willbe elicited The completed OEK is not obtained until theintents matching the specific actions are elicited because it
is difficult to finish the OEK elicitation process from theoperatorrsquos practical action to the structured OEK in onlyone step we present a novel multistage OEK acquisitionframework as shown in Figure 2 The framework consistsof five phases which are (1) the stage of OEK sourcesidentification (2) the stage of motion analysis (3) the stageof motion eliciting (4) the stage of intent analysis and (5)the stage of postprocessing
The following knowledge acquisition techniques are usedin the framework humanmotion analysismotion elicitationand standard interview In the previous literatures each ofthem has been used separately However we construct anew data fusion analysis method which combines the threeeffectively and overcomes each onersquos weak point
In the stage of OEK sources identification the rightmanufacturing process or engineering problem is selected asthe source of OEK acquisition
In the stage of motion analysis an engineerrsquos operation inspecific manufacturing process is captured and modeled Atfirst an engineering problem in the manufacturing process isselected as theOEK source And then the operatorrsquos operationis recorded by the video At last the motion and scenariomodel are established by means of MODAPTS [31]
The target of the stage of motion elicitation is to obtainthe OEK content The variable precision rough set algorithmis used to elicit such knowledge
6 Mathematical Problems in Engineering
In the stage of intent analysis we use the standard inter-view to recognize the real intention of an expertrsquos motionTheexpertrsquos motion matching the right intent will be retained
In the postprocessing stage the problem scenarios con-tributorrsquos information and knowledge credibility are inte-grated with theOEK contentThe structuredOEK is acquiredand the OEK acquisition process is finished
5 Description of OEK Acquisition Method
51 Identification of OEK Sources The aim of eliciting theOEK is to extract and store the skilled operatorrsquos know-how and train the novice operators The complex opera-tional process difficult to grasp becomes the appropriatecandidate of OEK sources The skilled techniciansrsquo OEKin such process will be used to support novice trainingMoreover the workflows needing to be optimized to increasethe productivity are also the potential candidate of OEKsources The expertsrsquo OEK will be valuable to aid workflowsredesign and optimization
52 Motion Analysis and Modeling The aim of this phase isto decompose the operation of operators into basic motionelements and then establish the motion and scenario model
The operation is difficult to be accurately representedand quantitatively analyzed by direct observation [24] Thespecific motion analysis tool is exploited to describe andexplain the workerrsquos operation [9] The result of motionanalysis can be used as the foundation of motion elicitationin the next stage
There are four steps in this phase
(1)Motion CaptureThemotion capture is based on the stereovision technique It is introduced not only to acquire the timeseries posture data of engineers operating some equipment ormachines but also to obtain the time varying relative positionbetween the hand position and operated equipment [5]
In this step firstly stereo vision cameras are set onthe appropriate place and calibrated Secondly the motionscapture software on the PC to record the real operation of theoperator At the same time shooting the operator by the videocamera is started It is important for video camera to take aposition that does not disturb motion capture and cover thewhole body of the expert engineer
(2) Motion Modeling In this step the human motion isbroken down into the basic motion elements based on thevideo shooting the operators In production managementfield the methods of motion analysis include therbligsMTM (methods-time measurement) [32] MOST (Maynardoperation sequence technique) [33] and MODAPTS (Themodular arrangement of predetermined time standards)
The MODAPTS is a method used to analyze the perfor-mance of manual work [31] In this paper the MODAPTSis selected to conduct the motion analysis and modelingdue to its advantages over others First MODAPTS namedldquothe language of workrdquo is a useful tool of motion analysiswhich can analyze the body motions required in a worktask and the time those motions require in standard motion
representation [34] Second MODAPTS is a simple logiceffective and low-cost motion analysis method and can beused with the aid of a desktop computer [35]
The MODAPTS has two distinguishing features elementmotion classes expressed in alphabetic form and timevalues expressed in units called ldquoMODSrdquo The movementclass denoted as ldquoMoverdquo (M) comprises motions done bybody parts such as the finger hand or arm The ldquoterminalrdquoclass comprising motions done at the end of an activityconsists of two kinds of activities Get (G) and Put (P) Theldquoauxiliaryrdquo class comprises motions that are not performedusing body parts such as walking sitting standing decidingand inspecting [36]
(3) Scenarios Modeling In the field of knowledge man-agement and knowledge engineering constructing scenariomodels will facilitate knowledge acquisition and reuse [37]Scenarios model can be used to describe the complexityof engineering problem solving process and is importantfoundation of knowledge sharing and reuse [38] Scenariosusually have characteristic elements such as the presupposedsetting agents or actors goals or objectives and sequences ofactions and events [39]
In our study the scenarios model integrates processinggoals and their subgoals and agents and their actions Inthe scenarios model agents and their actions representingthe operatorsrsquo motion combination or motion sequence arethe essential elements and are used for eliciting skillfuloperatorsrsquo OEK content during the next stage The goal andsubgoals in the model describe the different goalsrsquo level ofprocess
In the manufacturing process the factors of ldquoman-machine interactionrdquo (scenario factors for short) shouldbe considered in the scenarios model The man-machineinteraction explains the relationship between operator andmachine The special way of interaction between operatorsand machines or tools may be the potential technical know-how of skillful operators for example the choice of toolsand the preparation before processing These factors do notbelong to the motion combination or motion sequence andthen are thorny to be described in the motion model Thesefactors are added to the scenario model
The integrated scenarios model is shown in Figure 3 Themodel includes goals and subgoals of operation agents andtheir actions and story line Specifically the goal and subgoalsdescribe the detailed production processThe agents and theiractions represent the technicianrsquos operation which can beused to elicit technicianrsquos OEK The story line presents thesequence of operation such information is often provided inthe operation instructions
(4) Establishing the Integrated Model The information ofproduct quality is added to the scenario model in this stepAnd then the integrated model is established as shown inFigure 4
Up till now the completed information including oper-ational process and result is established in the integratedmodel which can be used as the fundament of motionelicitation in the next stage
Mathematical Problems in Engineering 7
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action MessageactionAgent
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
Spec
ific c
onte
nt o
f go
alSp
ecifi
c con
tent
of
goal
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Subg
oal 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
middot middot middot
Figure 3 The scenario model
53 Motion Elicitation Motion elicitation is the critical stagein the OEK acquisition framework The aim of motion elic-itation is to obtain the expertrsquos critical motion and scenariofactors affecting product qualityThe variable precision roughset (VPRS) is a useful tool of knowledge acquisition and isemployed to elicit OEK in our study [40 41]
As a mathematical methodology rough sets provide apowerful tool for data analysis and knowledge discoveryfrom imprecise and ambiguous data [42] The rough setstheory has been successfully applied in diverse areas suchas knowledge acquisition forecasting modeling and datamining The variable precision rough set (VPRS) model is anextension of the original rough set model The main idea ofVPRS is to allow objects to be classified with an error smallerthan a certain predefined level [43]
531 Some Definitions Related to VPRS VPRS operates onwhat may be described as a knowledge representation systemor information system [22 23 44] An information system isa 4-tuple 119878 = (119880 119860 119881 119891) where
119880 is a nonempty finite set of objects119860 is a nonempty finite set of attributes we have 119860 =
119862 cup 119863 and 119862 cap 119863 = 120593 where 119862 is a nonempty setof condition attributes and 119863 is a nonempty set ofdecision attributes119881 is the union of attribute domains that is 119881 =
cup119886isin119860119881119886 where 119881
119886is a finite attribute domain and the
elements of 119881119886are called value of attribute 119886
119891 119880 times 119860 rarr 119881 is an information function whichassociates a unique value of each attribute with eachobject belonging to 119880 that is forall119886 isin 119860 and forall119909 isin 119880119891(119909 119886) isin 119881
119886
Suppose that information system 119878 = (119880 119860 119881 119891) witheach subset 119885 sube 119880 and an equivalence relation 119877 referredto as an indiscernibility relation corresponds to partition-ing of 119880 into a collection of equivalence classes 119880119877 =
1198641 1198642 119864
119899 which represents that 119880 could be divided
into 119899 subsets of 1198641 1198642 119864
119899according to equivalence
relation 119877 We will assume that all sets under consideration
8 Mathematical Problems in Engineering
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Su
bgoa
l 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
ldquoPro
duct
qua
lityrdquo
Spec
ific f
acto
rs
Parameter A 1
Parameter A 2
Parameter A n
Parameter C 1
Parameter C 2
Parameter C n
Parameter B 1
Parameter B 2
Parameter B n
middot middot middot
ActionAgent
Messageaction
Figure 4 The integrated model
are finite and nonempty The variable precision rough setsapproach to data analysis hinges on two basic conceptsnamely the 120573-lower and the 120573-upper approximations of aset The 120573-lower and the 120573-upper approximations can also bepresented in an equivalent form as shown belowThe 120573-lowerapproximation of the set 119885 sube 119880 and 119875 sube 119862 is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)le120573
119909119894isin 119864 (119875) (4)
The 120573-upper approximation of the set 119885 sube 119880 and 119875 sube 119862is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)lt1minus120573
119909119894isin 119864 (119875) (5)
where 119864(sdot) denotes a set of equivalence classes (in the abovedefinitions they are condition classes based on a subset ofattributes 119875) Consider
119885 sub 119864 (119863)
119875119903(119885 | 119909
119894) =
Card (119885 cap 119909119894)
Card (119883119894)
(6)
Based on Ziarko [43] the measure of quality of classifica-tion for the VPRS model is defined as
120574 (119875119863 120573) =
Card (⋃1minus119875119903(119885|119909119894)
119909119894isin 119864 (119875))
Card (119880) (7)
Mathematical Problems in Engineering 9
where 119885 sube 119864(119863) and 119875 sube 119862 for a specified value of 120573The value 120574(119875119863 120573) measures the proportion of objects inthe universe (119880) for which a classification (based on decisionattributes119863) is possible at the specified value of 120573
532 VPRS Knowledge Extraction Algorithm The LEM2algorithm proposed by Grzymala-Busse [45] is one of themost widely used algorithms and many real-world applica-tions use this algorithm to extract knowledge The VPRSknowledge extraction algorithm (VPRS-KE) originated fromLEM2 and took the inclusion errors into account [46] Inour study VPRS-KE is used to elicit the specific motion andscenario factors in the technicianrsquos operation
In the VPRS-KE a heuristic strategy is used in thealgorithm to extract a minimum set of rules All of positiveregions and boundary region subsets can be denoted by 119884for each 119870 isin 119884 (the decision connecting with region 119870 is119863) Given that 119862 = 119888
1and 1198882and sdot sdot sdot and 119888
119899is the conjunction
of 119899 elementary conditions the objects in the decision tablecovered by 119862 can be expressed as follows
[119862] is the cover of rule 119862 on the decision table[119862]+
119870= [119862] cap 119870 is the positive cover of 119862 on119870
[119862]minus
119870= [119862] cap (119880 minus119870) is the negative cover of 119862 on119870
A decision rule is denoted by 119903The procedure of the rule extraction is summarized in
VPRS knowledge extraction algorithm as follows
Input119870 each of the positive regions or the boundaryregions subset in 119884 (119870 isin 119884) 120573 is the allowedinclusion error for VPRSOutput 119877 set of rules extracted from region119870Step 1 119866 larr 119870 119877 larr Φ
Step 2 While 119866 = Φ
Step 3 BeginStep 4 Initialize the condition set of a rule with anempty set 119862 larr Φ
Step 5 Initialize 119862Current with all the attributes andtheir values in 119866
119862Current larr997888 119888 [119888] cap 119866 = Φ (8)
Step 6 Iteratively add conditions to 119862 until set [119862] isincluded in the set119870with an inclusion error threshold120573
While (119862 = 120593) Or (119890([119862] 119870) le 120573) doBeginSelect 119886 isin 119862Current such that card([119886] cap 119866) ismaximumIf ties occur select 119886with the smallest card([119886])and if further ties occur select the first 119886 fromthe listAdd condition 119886 to 119862
119862 larr997888 119862 cup 119886 (9)
Eliminate the conditions which have beenalready used
119862Current larr997888 119888 [119888] cap 119866 = Φ (10)
Update 119862Current
119862Current larr997888 119862Current minus 119862 (11)
End
Step 7 Delete the redundant conditions
For each 119886 isin 119862 doIf 119890([119862 minus 119886] 119870) le 120573
Then 119862 larr997888 119862 minus 119886 (12)
End For
Step 8 Create a rule 119903 based on 119862 and put the ruleinto 119877
119877 larr997888 119877 cup 119903 (13)
Step 9 Remove the objects covered by 119877 from 119866
119866 larr997888 119866 minus ⋃
119903isin119877
[119903] (14)
Step 10 EndStep 11 Delete the redundant rules
For each 119903 isin 119877 do
If 119870 sube ⋃
119878isin(119877minus119903)
[119904] Then 119877 larr997888 119877 minus 119903 (15)
End For
Step 12 Output 119877
54 Intent Recognition In cognitive psychology intent refersto the thoughts one has before producing an action [47]Intent recognition is to identify the goal of observed sequenceofmotions and is performed by the action agent It is a processby which an agent can gain access to the goals of another andpredict its future actions and trajectories The understandingof human intent based on human motions remains a highlyrelevant and challenging research topic [48]
In our study the standard interview is employed todetect the underlying intent behind humanmotion First theskilled operators are interviewed to evaluate OEK contentand explain the specific intent behind the motion Secondthe advantage of skillful operations and the disadvantage ofunskillful operations will be recognized
55 Postprocessing In the postprocessing the related fac-tors of problem scenarios contributors and creditabilityare integrated into the OEK content and the completedrepresentation of OEK is constructed
10 Mathematical Problems in Engineering
Table 2 MODAPTS representation of operatorrsquos welding process fragment
Number Motion of left hand Motion of right handDiscomposed
motion descriptionMOD
representationDiscomposed
motion descriptionMOD
representation1 Grasp the pipe M4G1
2 Insert the pipe andadjust its position M4P2 Prepare the
welding gun M3P2
3 Hold the pipe H Start spot welding M1P0 times 119899
Figure 5 Shooting operatorrsquos operation
6 Case Study
In our study a manual welding case is used to illustrate theproposed OEK acquisitionmethodThis case originates froma real manufacturing companyrsquos production improvementproject
61 Identification of OEK Sources SQ company is a producerof new energy devices The main product of company isLNG (Liquefied Natural Gas) cylinders The welding processis widely used in the cylindersrsquo manufacturing The head ofinner vessel due to its complex internal structure cannot bemanufactured by autowelding Therefore manual welding isemployed in this process (Figure 5)
In actual manufacturing the varying quality of theproduct causes much trouble for the company The majorreason for the productrsquos quality variation lies in the differentwelding methods used by the workers Because the trainingof new employees needs a long time there are always novicesand skilled operators in the company Although the companyprovides the standard operation instructions the novicesusually find it hard to grasp the technique know-how Forthe skilled operators they often feel difficult to tell what theirempirical knowledge is and what kind of operation is the bestin guiding the novice Therefore it is an urgent mission toanalyze the operational know-how of the skilled operatorsand elicit their OEK
62 Motion Modeling
Step 1 (motion capture) Fifteen skilled technicians andfifteen novices were invited to take part in the case In this
step motion capture was carried out in the real operationsituation as shown in Figure 5 It is important for the videocamera to take a position that does not disturb the workerrsquosoperation In our study the wearable sensors were not chosensince they often burden theworker and affect human thinking[24]
Step 2 (motion analysis) TheMODAPTS analysis can trans-late the welding operation into basic motion element classcodes and time values through video examination [9] Forexample in an assembly process the operatorrsquos motionsequence includes ldquomove the left hand to the componentrdquoldquoget the componentrdquo ldquomove the componentrdquo and ldquoput thecomponentrdquo which are assigned the codes M3 G1 M3 andP1 respectively Thus the resulting motion MODAPTS isM3G1M3P1
In our study the welding process is represented alphanu-merically as motion element sets by means of IEMS softwareFigure 6 illustrates an example of a MODAPTS for sequen-tial welding operations consisting of grasping insertingadjusting and welding operations Table 2 presents theMOD representation of a fragment of the operatorrsquos weldingprocess
Step 3 (establish scenario model) In this step the result ofMODAPTS analysis is used to construct the scenario modelThe operatorrsquos motion combination andmotion sequence arethemain part of the scenariomodelThe goal and subgoals ofthe operator are the assistant part of scenario model
The scenario factors are considered in the scenariomodelIn our case the ldquoman-machine interactionrdquo includes twoparts the interaction between operator and objective and theinteraction between operator and tools
In the part of man-object interaction the factors consistof the position of the welding arc starting point the numberof rotations welding a pipe and the welding mode
In the part ofman-tool interaction the factors include thewelding gun posture in the difficult process part
The scenario model is shown in Figure 7
Step 4 (establish integrated model) The integrated modelis established by attaching the quality information of eachoperation to the scenario model
In the case the quality of welding process is evaluated bythe standard of the enterpriseThe evaluation criteria includethe weld surface color and the quality of the weld seam Theweld colors include white yellow and blackWhite is the best
Mathematical Problems in Engineering 11
(a) A case of welding process
② M3④ M1④ P2
③ P2
① M4
③ M4② G1
⑤ H
② M3
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0
(b) A MODAPTS analysis of welding process
Figure 6 The MODAPTS analysis of a welding process fragment
and black is the worst In addition the weld surface quality isdivided into three classes good medium and poor
The integrated model is shown in Figure 8
63 OEK Content Eliciting
(1) PreprocessingThe preprocessing is the fundamental of theeliciting algorithm in the next stage
According to the characteristics of motion sequence andthe requirement of VPRS algorithm the following steps areconducted
Step 1 Remove themeaninglessmotionswhich have nothingto do with the operation such as drinking and talking
Step 2 Combine the repetitive motions for example com-bining M2P1M2P1M2P1 into M2P1 times 3 If the repetitive timeofmotion combination ismore than 3 the time is representedas 119899
The structured result of preprocessing is shown in Table 3The explanation of header of Table 3 is as follows ID indicateseach operator Steps indicate the subgoals in the operationalprocess Arcing point the number of rotations and modechoosing are scenario factors Color and surface quality arethe evaluation indices of welding process quality In thecontent of table null indicates no operation in the step
(2) Eliciting Process In this step the initial OEK content iselicited by means of VPRS based on the result of preprocess-ing and is shown in Table 4
64 Intent Analysis In this case the skilled technicians whoparticipated in the experiment were interviewed to explainthe specific intent behind the motion The evaluation factorsnecessity and intent of the motions are listed in Table 5
65 Postprocessing In this stage the related factors of prob-lem scenarios contributors and creditability are integratedinto the OEK content A completed representation of theskilled operatorsrsquo OEK is obtained from the above stagesThestructured representation of OEK is shown in Table 6
7 Discussion
71 Comparison of OEK between Skilled Technicians andNovices The OEK obtained by our method is the specificknow-how coming from the experience of skilled operatorsuch knowledge indicates themotional difference in the criti-cal operational steps between skilled and unskilled operatorsIn this section wewill discuss such difference between skilledoperatorsrsquo OEK and novicesrsquo motions in order to evaluate thevalue of OEK
We analyze the difference from two aspects of timeconsumption and energy consumption performance in thesame operating procedures (Step 3 Step 5 and Step 6)We calculate the operatorsrsquo time from the operation videosIn order to measure the energy consumption of differentoperators CATIA as leading human factors engineeringsoftware is used as the platform to model the human motionand provide the energy consumption Figure 9 is the CATIAsimulation of different operators The results are shown inFigure 10
The difference of time consumption (156 s and 105 s)between skilled and unskilled operators is obvious accordingto Figure 10(a) However to our surprise the energy con-sumption of unskilled operators is more than three times thatof skilled operators (1190 cal and 313 cal see Figure 10(b))The plausible explanation is the importance of OEK whichnot only improves the product quality but also releases theoperatorsrsquo fatigue and then increases the operatorsrsquo safetyFurthermore the result of comparison demonstrates theaccuracy of OEK acquired by our method
72 Comparison of Our Method with Related Works Theevaluation framework of requirements of elicitation tech-nique is used in our study It is regarded as a reasonable andacceptablemethod to evaluate elicitation technique althoughit is a qualitative evaluation method [49] The evaluationframework includes four factors (elicitor informant problemdomain and elicitation process) and each factor includessome detailed attributes In the evaluation framework acompiled technique adequacy table is used to select the mostadequate techniques for a specific application context [50]In this section the evaluation framework is revised and usedto compare our study with related works in the context of
12 Mathematical Problems in Engineering
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
Processed objects
M3
No 1 pipe
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
Num
ber 1
pip
e weld
ing
Weld
ing
prep
arat
ion
Weld
ing
Posit
ion
Weld
ing
mat
eria
ls pr
epar
atio
n
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
P2
M1
G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
Welding
M1
G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
M
an-m
achi
ne in
tera
ctio
n
Hum
an-a
rtifa
cts
inte
ract
ion
ldquoSub
goalrdquo
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
t
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Ges
ture
of h
oldi
ng
tool
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
D3 D3 D3
6 12 12
Combination Combination Succession
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middotmiddot middot middot
Figure 7 The scenario model of the case
Mathematical Problems in Engineering 13
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
ProcessedobjectsM3
Number 1
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
ldquoSub
goalrdquo
Num
ber 1
pip
e weld
ing
ldquoSub
goalrdquo
Weld
ing
prep
arat
ion
ldquoSub
goalrdquo
Weld
ing
ldquoSub
goalrdquo
Posit
ion
ldquoSub
goalrdquo
Weld
ing
mat
eria
lspr
epar
atio
n
Subg
oal 2
Subg
oal 1
Subg
oal 1
P2
M1G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
WeldingM1G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
Man
-mac
hine
inte
ract
ion
Hum
an-a
rtifa
cts
inte
ract
ion
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
tG
estu
re o
fho
ldin
g to
ol
Subg
oal 2
Subg
oal 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
ldquoQua
lity
fact
orsrdquo
The q
ualit
y of
weld
ing
The s
urfa
ce q
ualit
yof
weld
ing
The c
olor
of
weld
ing
D3 D3 D3
6 12 12
Combination Combination Succession
Black Black Black
Non-well-distributed
Well-distributed
Well-distributed
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middot middot middot middot
pipe
Figure 8 The integrated model of the case
14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
qualitative methods The disadvantages of these methodsare obvious they are inefficient time-consuming and notreplicable for different acquisition results will occur due todifferent cognition and learning modes of observers There-fore development of an efficient and quantitative method toelicit operational know-how becomes an emergent task in thefield of knowledge management
Aiming at the obstacles in the field of engineering-oriented operational know-how acquisition we proposea concept of engineering-oriented operational empiricalknowledge (OEK) to describe this kind of knowledge andthen present an explicit definition and the representationof engineering-oriented OEK A novel OEK acquisition(OEKA) framework is provided in our study which cancomplete the transformation from technicianrsquos operationalmotion to the structured OEKThe OEKA integrates motionanalysis motion elicitation and intent analysis First theworkerrsquos specific operation process is divided into basicmotion elements by means of modular arrangement of pre-determined time standards (MODAPTS) which is a systemused to analyze the performance of manual work [9] Secondwe combine the motion elements with scenario factors toestablish the scenario model and then the algorithm ofvariable precision rough set (VPRS) is used to extract thecritical motion of skilled technicians Third the skilledtechnicianrsquos intent behind theOEK content is elicited with theaid of interview At last the structured representation of OEKis constructed in the postprocessing
Our contribution in this work is threefold
(1) We define the concept of engineering-oriented OEKand provide the structured representation of OEK
(2) We propose an integrated OEK acquisition frame-work integrating motion analysis motion elicitationand intent analysis by which empirical knowledge inthe engineerrsquos operation can be obtained
(3) We demonstrate that the extracted OEK can capturethe technical know-how and can be used for novicesrsquoskill training
The rest of the paper is organized as follows we firstreview the related works in Section 2 In Section 3 we definethe concept of OEK and then provide the representationmodel of OEK In Section 4 we present the OEK acquisitionmethod and its advantage Section 5 describes the completeprocess of OEK acquisition Section 6 provides a detailedcase study The comparison of our method with some relatedworks is discussed in Section 7 Conclusions and futurestudies are outlined in the last section
2 Related Works
21 Tacit Knowledge and Tacit Knowledge AcquisitionKnowledge tied to the senses physical experiences move-ment skills intuition unarticulated mental models orimplicit rules of thumb is tacit [18 19] Tacit knowledge isrooted in the action procedures routines ideals commit-ment and emotion which makes it differ from the explicitknowledge that can be uttered and obtained as drawing and
writing Individuals with tacit knowledge are often unawareof what they possess and how valuable they are for others
Tacit knowledge acquisition means eliciting tacit knowl-edge from various knowledge sources and representing it inthe right form in order to share the knowledge among orga-nizational members and reuse it [20 21] Up till now manytacit knowledge extractionmethods have been developed andapplied in the fields of software engineering manufacturingengineering and health care [22 23] Many of these methodsare based on literal documents And with the developmentof natural language processing machine learning the tacitknowledge acquisitionmethods based on document aremoreand more efficient and valuable
Although the methods based on literal document aresuitable for acquiring the explanation of procedures theyare difficult to acquire the essence of the operational know-how [24] In addition traditional knowledge extractiontechniques work well in eliciting tacit knowledge in literaldocuments They do not elicit the intent of the documentsHowever intent is an indispensable part of tacit knowledgethe intent elicitation should be integrated in the tacit knowl-edge acquisition method [25]
22 Operational Know-How and Knowledge AcquisitionOperational know-how is regarded as a kind of tacit knowl-edge [5] Such knowledge does not originate from theliterature or documents identified as explicit knowledgebut originates from the experience of an individual [26]Consequently it is difficult to be expressed and transferred[27 28]
Many scholars have committed to obtaining the opera-tional know-how and proposed many acquisition models ormethods In Table 1 the existing literatures about operationalknow-how acquisition are analyzed from the perspectivesof method description qualitative or quantitative object ofextraction applied technology application field and draw-back
These methods are divided into three types qualitativemethod quantitative method and mixed method
Observation and apprenticeship are classic qualitativemethods for extracting the operational know-how of skilledtechnicians [3] Observation is recognized as a valuable formof learning according to the social cognitive theory [8] Theobserver gains insights into the skilled techniciansrsquo practicesand builds his personal knowledge base by observing theactions of the expert [29] Apprenticeship is formal arrange-ments where specialized knowledge or skill from a domainexpert is passed to a novice The novice will acquire thesame level of competence as the expert after extensivelypracticing the skill for a prescribed period of time [7] Thesequalitative acquisition methods are successful at transferringthe operational know-how from experts to novices and arethe focus of earlier literatures However these methods haveobvious drawbacks such as the time-consuming and theinconsistent acquisition results for the different cognition andlearning modes of learners
The quantitativemethod of operational know-how acqui-sition is another type in which the specific algorithm ortool is used to elicit the operational know-how Nakagawa
Mathematical Problems in Engineering 3
Table 1 Related literaturesrsquo analysis
Literature Methoddescription
Qualitative orquantitative
Object ofextraction
Appliedtechnology Application field Drawback
Bandura [8] andNonaka [10] Observation Qualitative
methodActions of
domain expert Observe Manual workInconsistentacquisitionresults
Collis et al [7 11] Apprenticeship Qualitativemethod
Specializedknowledge orskill of domain
expert
Extensivelypracticing the
skillNot limited
Time-consuming andinconsistentacquisitionresults
Hashimoto et al[12] and Yoshida etal [5]
Personal motionsensing Mixed method
Skilledoperations of
skilledtechnicians
Field-orientedinterview
human motioncapture andvideo analysis
Manufacturingindustry
Depends on theinterviewseriously
Watanuki [13] Method of skillstransfer
Qualitativemethod
Castingtechnologiesand skills of
skilledtechnicians
Sharing a ldquobardquo(place) usingmultimedia
technology andvirtual realitytechnology
Manufacturingskills training
Therepresentationof knowledge is
vague
Nakagawa et al[14] and Huang etal [15]
Skill educationservice
Quantitativemethod
Extract skillsfrom nursing
motion (focusedon bed caremotion)
Nursing skill isextracted frominterview andvideo analysisThe extractedskills areassessed
quantitatively
Nurse and careworker
It is difficult toformally
represent suchknowledge
Li et al [16] andNguyen and Zhang[2]
Mobility andphysical activity
sensingMixed method
Nursesfirefighterswaiters
housekeepersor janitors
Extracthigh-level
knowledge rulesfrom low levelsensor signalsby means of anunsupervisedapproach
Service
Aiming at theactivities of
person lackingdetailed motion
Mitsuhashi et al[17]
Motion curvedsurface analysisand composite
Quantitativemethod Skill succession
Track the wholejoint motion by
means ofmotion curvedsurfaces andconfirm the
validity of skillsuccession by
skeleton motionmovie and
curved surface
Sports andentertainment
motion
Lackingaccurate
description ofthe motionsequences
et al [14] extracted nursing skills by analyzing the bodyfoot and muscle activities of experts and nonexperts andthen developed a novel skill education service for nursingMitsuhashi et al [17] tracked the whole joint motion bymeans of motion curved surfaces and confirmed the validityof skill succession by skeleton motion movie and curvedsurface This method was used to elicit the know-how ofsports and entertainment motion The quantitative methodcan analyze the motion and behavior of person accurately
However the empirical knowledge representation in themethod is somewhat weak
The mixed method is an integrated framework includingqualitative and quantitative methods Yoshida et al [5]presented a mixed method to extract the tacit knowledgeconsisting of the skilled operations of skilled technicians inthe manufacturing industry The method comprises threeaspects the field-oriented interview the human motion cap-ture and the video analysis However this method depends
4 Mathematical Problems in Engineering
(a) Motion combanation (b) Motion sequence
Figure 1 Examples of motion combanition and motion sequence
on the interview seriously and may reduce the effectivenessof knowledge acquisition Nguyen and Zhang [2] extractedhigh-level knowledge rules from low level sensor signals bymeans of an unsupervised approach in the service Theirstudy focused on the activities of person and lacked explicitmotion descriptionThemixed method integrates the advan-tages of qualitative and quantitative methods and may besuitable to obtain the operational know-how of experts
In summary the explicit definition and representationof engineering-oriented operational knowledge are absent inthe existing literatures Such reasons have limited the devel-opment of standardized and effective knowledge acquisitionapproach Our study aims to overcome these obstacles andpresent a novel and useful knowledge acquisition frameworkby means of mixed method In the next section the formaldefinition and representation of OEK are introduced
3 Definition and Representation of OEK
31 Definition of OEK In this paper the engineering-oriented OEK is defined as follows
Engineering-oriented OEK is the operational know-how comprising the specific motion combination motionsequence formed during the repeated practice and thinkingof an individual which are of value for bettering the produc-tion process
In the manufacturing process some manual operationsare very simple For example in the drilling operation anoperator only repeats the simple motion combination ldquopulland pushrdquo as shown in Figure 1(a) In other cases theoperation can be more complex For example in the moldingoperation shown in Figure 1(b) the operator uses his lefthand to grasp a number of parts placing them into a moldand rowing them against the mold while his right handoperates the machine When the molding is finished theoperator removes the completed artifact Such a complexmotion sequence includes a series of motion elements
32 Interpretation of OEK Definition Some key concepts inthe definition of OEK are explained as follows
(1) Operational Know-How Knowledge Operational know-how knowledge is the special knowledge that facilitates
efficient engineering operationsThis kind of knowledge doesnot originate from the literature or documents but originatesfrom skilled techniciansrsquo experience [26]
(2) Motion Combination Motion combination is the integra-tion of a series of basic operational motion elements withoutpause Motion combination is a basic form of the content ofOEK This kind of OEK comes from an individualrsquos repeatedpractice and thinking which are the most effective andconvenient motions for the specific operation For examplea proficient welding operator would use some particularmotion combination in the welding process which enablesthe operator to finish the production with high quality andquick speed
The motion combination is formalized as follows
119872119888= 11989811198982sdot sdot sdot 119898119899 (1)
where119872119888denotes the motion combination and119898
119899is a basic
motion element
(3) Motion Sequence A motion sequence is an ordered setof several motion combinations where the pause betweenmotion combinations is permitted As another form of thecontent of OEK the motion sequence represents a completeoperationmethod withwhich a skilled operator conducts themost effective operation process
The motion sequence is formalized as follows
119872119904= 11989811988611198981198862sdot sdot sdot 119898119886119895 or 119898
11988711198981198872sdot sdot sdot 119898119887119896 or sdot sdot sdot
or 11989811988911198981198892sdot sdot sdot 119898119889119897
(2)
where119872119904denotes the motion sequence 119898
119894119899119894 = 119886 119887 119889
is a basic motion element and 11989811988611198981198862sdot sdot sdot 119898119886119895 is a motion
combination
33 Representation of Engineering-OrientedOEK Knowledgeacquisition is closely related with knowledge representationfor the manipulation of acquired knowledge largely dependson how the knowledge is represented to reflect domainexpertsrsquo mental model and problem solving process [30]The main body of OEK representation is OEK contentincorporating the motion combination andmotion sequence
Mathematical Problems in Engineering 5
OEK sources identification
Human motion analysis
Scenario model establishment
Obtaining initial OEK
Structured OEK
Specific operation process
MODAPTS
Start
End
Variable precision rough set
Video analysis
Interview analysis
Motion modeling
Motion eliciting
Intent eliciting
Acquisition toolAcquisition processAcquisition phase
Intent analysis
Postprocessing
OEK sources
Figure 2 Multistage OEK acquisition framework
obtained from a skilled technician Besides this since OEKis related with the specific operation process and problemscenarios it is indispensable to integrate the scenarios intoOEK representation [22 23] The operatorrsquos intent assumesa driving role of the motions so it should be consideredin the representation of OEK Moreover the OEK obtainedfrom an individual experience is not always reliable so acredibility score should be given to indicate the reliability ofOEK Taking the above factors into account a complete OEKrepresentation should include the problem scenarios con-tributorrsquos information core content intent and creditabilityas shown in the following formula
⟨OEK⟩ = ⟨problem scenarios contributor content
intent creditability⟩ (3)
4 Methodology
In many cases skilled technicians are not aware of theOEK they possess and how this knowledge can be sharedwith others In the problem solving the technicianrsquos OEKis activated by the factors of problem context to realize thespecific intent In our study not only the know-how in themotion but also the intent behind the specific motion willbe elicited The completed OEK is not obtained until theintents matching the specific actions are elicited because it
is difficult to finish the OEK elicitation process from theoperatorrsquos practical action to the structured OEK in onlyone step we present a novel multistage OEK acquisitionframework as shown in Figure 2 The framework consistsof five phases which are (1) the stage of OEK sourcesidentification (2) the stage of motion analysis (3) the stageof motion eliciting (4) the stage of intent analysis and (5)the stage of postprocessing
The following knowledge acquisition techniques are usedin the framework humanmotion analysismotion elicitationand standard interview In the previous literatures each ofthem has been used separately However we construct anew data fusion analysis method which combines the threeeffectively and overcomes each onersquos weak point
In the stage of OEK sources identification the rightmanufacturing process or engineering problem is selected asthe source of OEK acquisition
In the stage of motion analysis an engineerrsquos operation inspecific manufacturing process is captured and modeled Atfirst an engineering problem in the manufacturing process isselected as theOEK source And then the operatorrsquos operationis recorded by the video At last the motion and scenariomodel are established by means of MODAPTS [31]
The target of the stage of motion elicitation is to obtainthe OEK content The variable precision rough set algorithmis used to elicit such knowledge
6 Mathematical Problems in Engineering
In the stage of intent analysis we use the standard inter-view to recognize the real intention of an expertrsquos motionTheexpertrsquos motion matching the right intent will be retained
In the postprocessing stage the problem scenarios con-tributorrsquos information and knowledge credibility are inte-grated with theOEK contentThe structuredOEK is acquiredand the OEK acquisition process is finished
5 Description of OEK Acquisition Method
51 Identification of OEK Sources The aim of eliciting theOEK is to extract and store the skilled operatorrsquos know-how and train the novice operators The complex opera-tional process difficult to grasp becomes the appropriatecandidate of OEK sources The skilled techniciansrsquo OEKin such process will be used to support novice trainingMoreover the workflows needing to be optimized to increasethe productivity are also the potential candidate of OEKsources The expertsrsquo OEK will be valuable to aid workflowsredesign and optimization
52 Motion Analysis and Modeling The aim of this phase isto decompose the operation of operators into basic motionelements and then establish the motion and scenario model
The operation is difficult to be accurately representedand quantitatively analyzed by direct observation [24] Thespecific motion analysis tool is exploited to describe andexplain the workerrsquos operation [9] The result of motionanalysis can be used as the foundation of motion elicitationin the next stage
There are four steps in this phase
(1)Motion CaptureThemotion capture is based on the stereovision technique It is introduced not only to acquire the timeseries posture data of engineers operating some equipment ormachines but also to obtain the time varying relative positionbetween the hand position and operated equipment [5]
In this step firstly stereo vision cameras are set onthe appropriate place and calibrated Secondly the motionscapture software on the PC to record the real operation of theoperator At the same time shooting the operator by the videocamera is started It is important for video camera to take aposition that does not disturb motion capture and cover thewhole body of the expert engineer
(2) Motion Modeling In this step the human motion isbroken down into the basic motion elements based on thevideo shooting the operators In production managementfield the methods of motion analysis include therbligsMTM (methods-time measurement) [32] MOST (Maynardoperation sequence technique) [33] and MODAPTS (Themodular arrangement of predetermined time standards)
The MODAPTS is a method used to analyze the perfor-mance of manual work [31] In this paper the MODAPTSis selected to conduct the motion analysis and modelingdue to its advantages over others First MODAPTS namedldquothe language of workrdquo is a useful tool of motion analysiswhich can analyze the body motions required in a worktask and the time those motions require in standard motion
representation [34] Second MODAPTS is a simple logiceffective and low-cost motion analysis method and can beused with the aid of a desktop computer [35]
The MODAPTS has two distinguishing features elementmotion classes expressed in alphabetic form and timevalues expressed in units called ldquoMODSrdquo The movementclass denoted as ldquoMoverdquo (M) comprises motions done bybody parts such as the finger hand or arm The ldquoterminalrdquoclass comprising motions done at the end of an activityconsists of two kinds of activities Get (G) and Put (P) Theldquoauxiliaryrdquo class comprises motions that are not performedusing body parts such as walking sitting standing decidingand inspecting [36]
(3) Scenarios Modeling In the field of knowledge man-agement and knowledge engineering constructing scenariomodels will facilitate knowledge acquisition and reuse [37]Scenarios model can be used to describe the complexityof engineering problem solving process and is importantfoundation of knowledge sharing and reuse [38] Scenariosusually have characteristic elements such as the presupposedsetting agents or actors goals or objectives and sequences ofactions and events [39]
In our study the scenarios model integrates processinggoals and their subgoals and agents and their actions Inthe scenarios model agents and their actions representingthe operatorsrsquo motion combination or motion sequence arethe essential elements and are used for eliciting skillfuloperatorsrsquo OEK content during the next stage The goal andsubgoals in the model describe the different goalsrsquo level ofprocess
In the manufacturing process the factors of ldquoman-machine interactionrdquo (scenario factors for short) shouldbe considered in the scenarios model The man-machineinteraction explains the relationship between operator andmachine The special way of interaction between operatorsand machines or tools may be the potential technical know-how of skillful operators for example the choice of toolsand the preparation before processing These factors do notbelong to the motion combination or motion sequence andthen are thorny to be described in the motion model Thesefactors are added to the scenario model
The integrated scenarios model is shown in Figure 3 Themodel includes goals and subgoals of operation agents andtheir actions and story line Specifically the goal and subgoalsdescribe the detailed production processThe agents and theiractions represent the technicianrsquos operation which can beused to elicit technicianrsquos OEK The story line presents thesequence of operation such information is often provided inthe operation instructions
(4) Establishing the Integrated Model The information ofproduct quality is added to the scenario model in this stepAnd then the integrated model is established as shown inFigure 4
Up till now the completed information including oper-ational process and result is established in the integratedmodel which can be used as the fundament of motionelicitation in the next stage
Mathematical Problems in Engineering 7
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action MessageactionAgent
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
Spec
ific c
onte
nt o
f go
alSp
ecifi
c con
tent
of
goal
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Subg
oal 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
middot middot middot
Figure 3 The scenario model
53 Motion Elicitation Motion elicitation is the critical stagein the OEK acquisition framework The aim of motion elic-itation is to obtain the expertrsquos critical motion and scenariofactors affecting product qualityThe variable precision roughset (VPRS) is a useful tool of knowledge acquisition and isemployed to elicit OEK in our study [40 41]
As a mathematical methodology rough sets provide apowerful tool for data analysis and knowledge discoveryfrom imprecise and ambiguous data [42] The rough setstheory has been successfully applied in diverse areas suchas knowledge acquisition forecasting modeling and datamining The variable precision rough set (VPRS) model is anextension of the original rough set model The main idea ofVPRS is to allow objects to be classified with an error smallerthan a certain predefined level [43]
531 Some Definitions Related to VPRS VPRS operates onwhat may be described as a knowledge representation systemor information system [22 23 44] An information system isa 4-tuple 119878 = (119880 119860 119881 119891) where
119880 is a nonempty finite set of objects119860 is a nonempty finite set of attributes we have 119860 =
119862 cup 119863 and 119862 cap 119863 = 120593 where 119862 is a nonempty setof condition attributes and 119863 is a nonempty set ofdecision attributes119881 is the union of attribute domains that is 119881 =
cup119886isin119860119881119886 where 119881
119886is a finite attribute domain and the
elements of 119881119886are called value of attribute 119886
119891 119880 times 119860 rarr 119881 is an information function whichassociates a unique value of each attribute with eachobject belonging to 119880 that is forall119886 isin 119860 and forall119909 isin 119880119891(119909 119886) isin 119881
119886
Suppose that information system 119878 = (119880 119860 119881 119891) witheach subset 119885 sube 119880 and an equivalence relation 119877 referredto as an indiscernibility relation corresponds to partition-ing of 119880 into a collection of equivalence classes 119880119877 =
1198641 1198642 119864
119899 which represents that 119880 could be divided
into 119899 subsets of 1198641 1198642 119864
119899according to equivalence
relation 119877 We will assume that all sets under consideration
8 Mathematical Problems in Engineering
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Su
bgoa
l 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
ldquoPro
duct
qua
lityrdquo
Spec
ific f
acto
rs
Parameter A 1
Parameter A 2
Parameter A n
Parameter C 1
Parameter C 2
Parameter C n
Parameter B 1
Parameter B 2
Parameter B n
middot middot middot
ActionAgent
Messageaction
Figure 4 The integrated model
are finite and nonempty The variable precision rough setsapproach to data analysis hinges on two basic conceptsnamely the 120573-lower and the 120573-upper approximations of aset The 120573-lower and the 120573-upper approximations can also bepresented in an equivalent form as shown belowThe 120573-lowerapproximation of the set 119885 sube 119880 and 119875 sube 119862 is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)le120573
119909119894isin 119864 (119875) (4)
The 120573-upper approximation of the set 119885 sube 119880 and 119875 sube 119862is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)lt1minus120573
119909119894isin 119864 (119875) (5)
where 119864(sdot) denotes a set of equivalence classes (in the abovedefinitions they are condition classes based on a subset ofattributes 119875) Consider
119885 sub 119864 (119863)
119875119903(119885 | 119909
119894) =
Card (119885 cap 119909119894)
Card (119883119894)
(6)
Based on Ziarko [43] the measure of quality of classifica-tion for the VPRS model is defined as
120574 (119875119863 120573) =
Card (⋃1minus119875119903(119885|119909119894)
119909119894isin 119864 (119875))
Card (119880) (7)
Mathematical Problems in Engineering 9
where 119885 sube 119864(119863) and 119875 sube 119862 for a specified value of 120573The value 120574(119875119863 120573) measures the proportion of objects inthe universe (119880) for which a classification (based on decisionattributes119863) is possible at the specified value of 120573
532 VPRS Knowledge Extraction Algorithm The LEM2algorithm proposed by Grzymala-Busse [45] is one of themost widely used algorithms and many real-world applica-tions use this algorithm to extract knowledge The VPRSknowledge extraction algorithm (VPRS-KE) originated fromLEM2 and took the inclusion errors into account [46] Inour study VPRS-KE is used to elicit the specific motion andscenario factors in the technicianrsquos operation
In the VPRS-KE a heuristic strategy is used in thealgorithm to extract a minimum set of rules All of positiveregions and boundary region subsets can be denoted by 119884for each 119870 isin 119884 (the decision connecting with region 119870 is119863) Given that 119862 = 119888
1and 1198882and sdot sdot sdot and 119888
119899is the conjunction
of 119899 elementary conditions the objects in the decision tablecovered by 119862 can be expressed as follows
[119862] is the cover of rule 119862 on the decision table[119862]+
119870= [119862] cap 119870 is the positive cover of 119862 on119870
[119862]minus
119870= [119862] cap (119880 minus119870) is the negative cover of 119862 on119870
A decision rule is denoted by 119903The procedure of the rule extraction is summarized in
VPRS knowledge extraction algorithm as follows
Input119870 each of the positive regions or the boundaryregions subset in 119884 (119870 isin 119884) 120573 is the allowedinclusion error for VPRSOutput 119877 set of rules extracted from region119870Step 1 119866 larr 119870 119877 larr Φ
Step 2 While 119866 = Φ
Step 3 BeginStep 4 Initialize the condition set of a rule with anempty set 119862 larr Φ
Step 5 Initialize 119862Current with all the attributes andtheir values in 119866
119862Current larr997888 119888 [119888] cap 119866 = Φ (8)
Step 6 Iteratively add conditions to 119862 until set [119862] isincluded in the set119870with an inclusion error threshold120573
While (119862 = 120593) Or (119890([119862] 119870) le 120573) doBeginSelect 119886 isin 119862Current such that card([119886] cap 119866) ismaximumIf ties occur select 119886with the smallest card([119886])and if further ties occur select the first 119886 fromthe listAdd condition 119886 to 119862
119862 larr997888 119862 cup 119886 (9)
Eliminate the conditions which have beenalready used
119862Current larr997888 119888 [119888] cap 119866 = Φ (10)
Update 119862Current
119862Current larr997888 119862Current minus 119862 (11)
End
Step 7 Delete the redundant conditions
For each 119886 isin 119862 doIf 119890([119862 minus 119886] 119870) le 120573
Then 119862 larr997888 119862 minus 119886 (12)
End For
Step 8 Create a rule 119903 based on 119862 and put the ruleinto 119877
119877 larr997888 119877 cup 119903 (13)
Step 9 Remove the objects covered by 119877 from 119866
119866 larr997888 119866 minus ⋃
119903isin119877
[119903] (14)
Step 10 EndStep 11 Delete the redundant rules
For each 119903 isin 119877 do
If 119870 sube ⋃
119878isin(119877minus119903)
[119904] Then 119877 larr997888 119877 minus 119903 (15)
End For
Step 12 Output 119877
54 Intent Recognition In cognitive psychology intent refersto the thoughts one has before producing an action [47]Intent recognition is to identify the goal of observed sequenceofmotions and is performed by the action agent It is a processby which an agent can gain access to the goals of another andpredict its future actions and trajectories The understandingof human intent based on human motions remains a highlyrelevant and challenging research topic [48]
In our study the standard interview is employed todetect the underlying intent behind humanmotion First theskilled operators are interviewed to evaluate OEK contentand explain the specific intent behind the motion Secondthe advantage of skillful operations and the disadvantage ofunskillful operations will be recognized
55 Postprocessing In the postprocessing the related fac-tors of problem scenarios contributors and creditabilityare integrated into the OEK content and the completedrepresentation of OEK is constructed
10 Mathematical Problems in Engineering
Table 2 MODAPTS representation of operatorrsquos welding process fragment
Number Motion of left hand Motion of right handDiscomposed
motion descriptionMOD
representationDiscomposed
motion descriptionMOD
representation1 Grasp the pipe M4G1
2 Insert the pipe andadjust its position M4P2 Prepare the
welding gun M3P2
3 Hold the pipe H Start spot welding M1P0 times 119899
Figure 5 Shooting operatorrsquos operation
6 Case Study
In our study a manual welding case is used to illustrate theproposed OEK acquisitionmethodThis case originates froma real manufacturing companyrsquos production improvementproject
61 Identification of OEK Sources SQ company is a producerof new energy devices The main product of company isLNG (Liquefied Natural Gas) cylinders The welding processis widely used in the cylindersrsquo manufacturing The head ofinner vessel due to its complex internal structure cannot bemanufactured by autowelding Therefore manual welding isemployed in this process (Figure 5)
In actual manufacturing the varying quality of theproduct causes much trouble for the company The majorreason for the productrsquos quality variation lies in the differentwelding methods used by the workers Because the trainingof new employees needs a long time there are always novicesand skilled operators in the company Although the companyprovides the standard operation instructions the novicesusually find it hard to grasp the technique know-how Forthe skilled operators they often feel difficult to tell what theirempirical knowledge is and what kind of operation is the bestin guiding the novice Therefore it is an urgent mission toanalyze the operational know-how of the skilled operatorsand elicit their OEK
62 Motion Modeling
Step 1 (motion capture) Fifteen skilled technicians andfifteen novices were invited to take part in the case In this
step motion capture was carried out in the real operationsituation as shown in Figure 5 It is important for the videocamera to take a position that does not disturb the workerrsquosoperation In our study the wearable sensors were not chosensince they often burden theworker and affect human thinking[24]
Step 2 (motion analysis) TheMODAPTS analysis can trans-late the welding operation into basic motion element classcodes and time values through video examination [9] Forexample in an assembly process the operatorrsquos motionsequence includes ldquomove the left hand to the componentrdquoldquoget the componentrdquo ldquomove the componentrdquo and ldquoput thecomponentrdquo which are assigned the codes M3 G1 M3 andP1 respectively Thus the resulting motion MODAPTS isM3G1M3P1
In our study the welding process is represented alphanu-merically as motion element sets by means of IEMS softwareFigure 6 illustrates an example of a MODAPTS for sequen-tial welding operations consisting of grasping insertingadjusting and welding operations Table 2 presents theMOD representation of a fragment of the operatorrsquos weldingprocess
Step 3 (establish scenario model) In this step the result ofMODAPTS analysis is used to construct the scenario modelThe operatorrsquos motion combination andmotion sequence arethemain part of the scenariomodelThe goal and subgoals ofthe operator are the assistant part of scenario model
The scenario factors are considered in the scenariomodelIn our case the ldquoman-machine interactionrdquo includes twoparts the interaction between operator and objective and theinteraction between operator and tools
In the part of man-object interaction the factors consistof the position of the welding arc starting point the numberof rotations welding a pipe and the welding mode
In the part ofman-tool interaction the factors include thewelding gun posture in the difficult process part
The scenario model is shown in Figure 7
Step 4 (establish integrated model) The integrated modelis established by attaching the quality information of eachoperation to the scenario model
In the case the quality of welding process is evaluated bythe standard of the enterpriseThe evaluation criteria includethe weld surface color and the quality of the weld seam Theweld colors include white yellow and blackWhite is the best
Mathematical Problems in Engineering 11
(a) A case of welding process
② M3④ M1④ P2
③ P2
① M4
③ M4② G1
⑤ H
② M3
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0
(b) A MODAPTS analysis of welding process
Figure 6 The MODAPTS analysis of a welding process fragment
and black is the worst In addition the weld surface quality isdivided into three classes good medium and poor
The integrated model is shown in Figure 8
63 OEK Content Eliciting
(1) PreprocessingThe preprocessing is the fundamental of theeliciting algorithm in the next stage
According to the characteristics of motion sequence andthe requirement of VPRS algorithm the following steps areconducted
Step 1 Remove themeaninglessmotionswhich have nothingto do with the operation such as drinking and talking
Step 2 Combine the repetitive motions for example com-bining M2P1M2P1M2P1 into M2P1 times 3 If the repetitive timeofmotion combination ismore than 3 the time is representedas 119899
The structured result of preprocessing is shown in Table 3The explanation of header of Table 3 is as follows ID indicateseach operator Steps indicate the subgoals in the operationalprocess Arcing point the number of rotations and modechoosing are scenario factors Color and surface quality arethe evaluation indices of welding process quality In thecontent of table null indicates no operation in the step
(2) Eliciting Process In this step the initial OEK content iselicited by means of VPRS based on the result of preprocess-ing and is shown in Table 4
64 Intent Analysis In this case the skilled technicians whoparticipated in the experiment were interviewed to explainthe specific intent behind the motion The evaluation factorsnecessity and intent of the motions are listed in Table 5
65 Postprocessing In this stage the related factors of prob-lem scenarios contributors and creditability are integratedinto the OEK content A completed representation of theskilled operatorsrsquo OEK is obtained from the above stagesThestructured representation of OEK is shown in Table 6
7 Discussion
71 Comparison of OEK between Skilled Technicians andNovices The OEK obtained by our method is the specificknow-how coming from the experience of skilled operatorsuch knowledge indicates themotional difference in the criti-cal operational steps between skilled and unskilled operatorsIn this section wewill discuss such difference between skilledoperatorsrsquo OEK and novicesrsquo motions in order to evaluate thevalue of OEK
We analyze the difference from two aspects of timeconsumption and energy consumption performance in thesame operating procedures (Step 3 Step 5 and Step 6)We calculate the operatorsrsquo time from the operation videosIn order to measure the energy consumption of differentoperators CATIA as leading human factors engineeringsoftware is used as the platform to model the human motionand provide the energy consumption Figure 9 is the CATIAsimulation of different operators The results are shown inFigure 10
The difference of time consumption (156 s and 105 s)between skilled and unskilled operators is obvious accordingto Figure 10(a) However to our surprise the energy con-sumption of unskilled operators is more than three times thatof skilled operators (1190 cal and 313 cal see Figure 10(b))The plausible explanation is the importance of OEK whichnot only improves the product quality but also releases theoperatorsrsquo fatigue and then increases the operatorsrsquo safetyFurthermore the result of comparison demonstrates theaccuracy of OEK acquired by our method
72 Comparison of Our Method with Related Works Theevaluation framework of requirements of elicitation tech-nique is used in our study It is regarded as a reasonable andacceptablemethod to evaluate elicitation technique althoughit is a qualitative evaluation method [49] The evaluationframework includes four factors (elicitor informant problemdomain and elicitation process) and each factor includessome detailed attributes In the evaluation framework acompiled technique adequacy table is used to select the mostadequate techniques for a specific application context [50]In this section the evaluation framework is revised and usedto compare our study with related works in the context of
12 Mathematical Problems in Engineering
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
Processed objects
M3
No 1 pipe
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
Num
ber 1
pip
e weld
ing
Weld
ing
prep
arat
ion
Weld
ing
Posit
ion
Weld
ing
mat
eria
ls pr
epar
atio
n
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
P2
M1
G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
Welding
M1
G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
M
an-m
achi
ne in
tera
ctio
n
Hum
an-a
rtifa
cts
inte
ract
ion
ldquoSub
goalrdquo
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
t
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Ges
ture
of h
oldi
ng
tool
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
D3 D3 D3
6 12 12
Combination Combination Succession
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middotmiddot middot middot
Figure 7 The scenario model of the case
Mathematical Problems in Engineering 13
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
ProcessedobjectsM3
Number 1
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
ldquoSub
goalrdquo
Num
ber 1
pip
e weld
ing
ldquoSub
goalrdquo
Weld
ing
prep
arat
ion
ldquoSub
goalrdquo
Weld
ing
ldquoSub
goalrdquo
Posit
ion
ldquoSub
goalrdquo
Weld
ing
mat
eria
lspr
epar
atio
n
Subg
oal 2
Subg
oal 1
Subg
oal 1
P2
M1G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
WeldingM1G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
Man
-mac
hine
inte
ract
ion
Hum
an-a
rtifa
cts
inte
ract
ion
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
tG
estu
re o
fho
ldin
g to
ol
Subg
oal 2
Subg
oal 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
ldquoQua
lity
fact
orsrdquo
The q
ualit
y of
weld
ing
The s
urfa
ce q
ualit
yof
weld
ing
The c
olor
of
weld
ing
D3 D3 D3
6 12 12
Combination Combination Succession
Black Black Black
Non-well-distributed
Well-distributed
Well-distributed
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middot middot middot middot
pipe
Figure 8 The integrated model of the case
14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
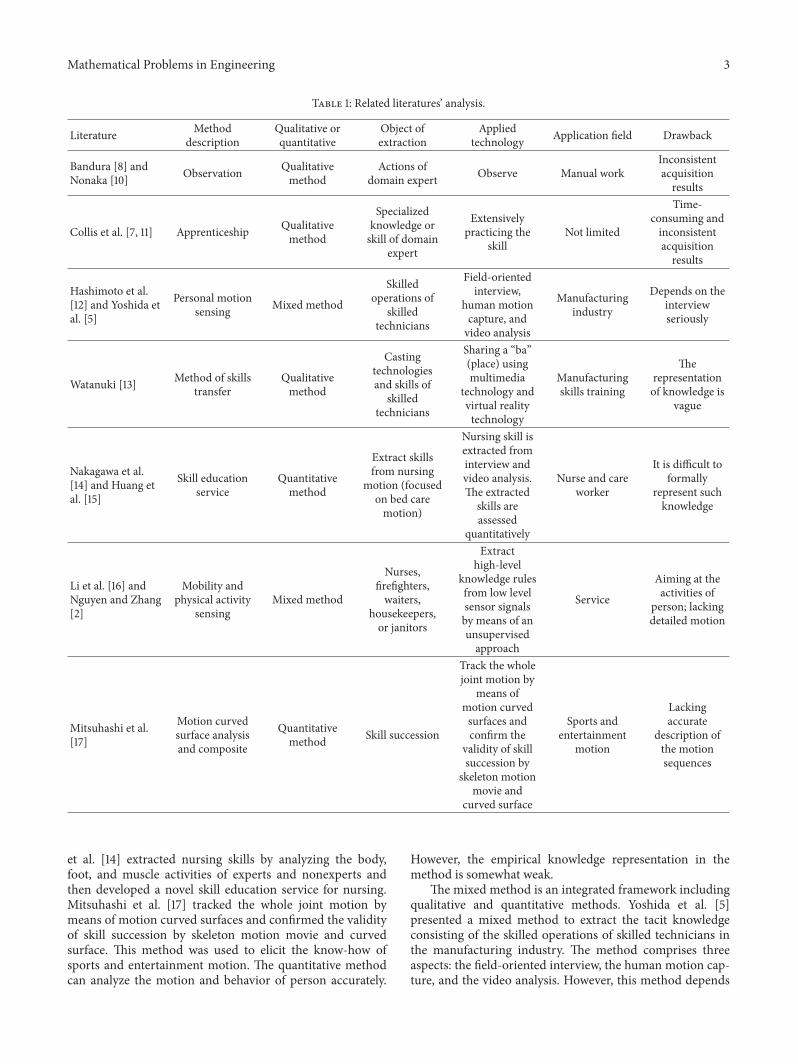
Mathematical Problems in Engineering 3
Table 1 Related literaturesrsquo analysis
Literature Methoddescription
Qualitative orquantitative
Object ofextraction
Appliedtechnology Application field Drawback
Bandura [8] andNonaka [10] Observation Qualitative
methodActions of
domain expert Observe Manual workInconsistentacquisitionresults
Collis et al [7 11] Apprenticeship Qualitativemethod
Specializedknowledge orskill of domain
expert
Extensivelypracticing the
skillNot limited
Time-consuming andinconsistentacquisitionresults
Hashimoto et al[12] and Yoshida etal [5]
Personal motionsensing Mixed method
Skilledoperations of
skilledtechnicians
Field-orientedinterview
human motioncapture andvideo analysis
Manufacturingindustry
Depends on theinterviewseriously
Watanuki [13] Method of skillstransfer
Qualitativemethod
Castingtechnologiesand skills of
skilledtechnicians
Sharing a ldquobardquo(place) usingmultimedia
technology andvirtual realitytechnology
Manufacturingskills training
Therepresentationof knowledge is
vague
Nakagawa et al[14] and Huang etal [15]
Skill educationservice
Quantitativemethod
Extract skillsfrom nursing
motion (focusedon bed caremotion)
Nursing skill isextracted frominterview andvideo analysisThe extractedskills areassessed
quantitatively
Nurse and careworker
It is difficult toformally
represent suchknowledge
Li et al [16] andNguyen and Zhang[2]
Mobility andphysical activity
sensingMixed method
Nursesfirefighterswaiters
housekeepersor janitors
Extracthigh-level
knowledge rulesfrom low levelsensor signalsby means of anunsupervisedapproach
Service
Aiming at theactivities of
person lackingdetailed motion
Mitsuhashi et al[17]
Motion curvedsurface analysisand composite
Quantitativemethod Skill succession
Track the wholejoint motion by
means ofmotion curvedsurfaces andconfirm the
validity of skillsuccession by
skeleton motionmovie and
curved surface
Sports andentertainment
motion
Lackingaccurate
description ofthe motionsequences
et al [14] extracted nursing skills by analyzing the bodyfoot and muscle activities of experts and nonexperts andthen developed a novel skill education service for nursingMitsuhashi et al [17] tracked the whole joint motion bymeans of motion curved surfaces and confirmed the validityof skill succession by skeleton motion movie and curvedsurface This method was used to elicit the know-how ofsports and entertainment motion The quantitative methodcan analyze the motion and behavior of person accurately
However the empirical knowledge representation in themethod is somewhat weak
The mixed method is an integrated framework includingqualitative and quantitative methods Yoshida et al [5]presented a mixed method to extract the tacit knowledgeconsisting of the skilled operations of skilled technicians inthe manufacturing industry The method comprises threeaspects the field-oriented interview the human motion cap-ture and the video analysis However this method depends
4 Mathematical Problems in Engineering
(a) Motion combanation (b) Motion sequence
Figure 1 Examples of motion combanition and motion sequence
on the interview seriously and may reduce the effectivenessof knowledge acquisition Nguyen and Zhang [2] extractedhigh-level knowledge rules from low level sensor signals bymeans of an unsupervised approach in the service Theirstudy focused on the activities of person and lacked explicitmotion descriptionThemixed method integrates the advan-tages of qualitative and quantitative methods and may besuitable to obtain the operational know-how of experts
In summary the explicit definition and representationof engineering-oriented operational knowledge are absent inthe existing literatures Such reasons have limited the devel-opment of standardized and effective knowledge acquisitionapproach Our study aims to overcome these obstacles andpresent a novel and useful knowledge acquisition frameworkby means of mixed method In the next section the formaldefinition and representation of OEK are introduced
3 Definition and Representation of OEK
31 Definition of OEK In this paper the engineering-oriented OEK is defined as follows
Engineering-oriented OEK is the operational know-how comprising the specific motion combination motionsequence formed during the repeated practice and thinkingof an individual which are of value for bettering the produc-tion process
In the manufacturing process some manual operationsare very simple For example in the drilling operation anoperator only repeats the simple motion combination ldquopulland pushrdquo as shown in Figure 1(a) In other cases theoperation can be more complex For example in the moldingoperation shown in Figure 1(b) the operator uses his lefthand to grasp a number of parts placing them into a moldand rowing them against the mold while his right handoperates the machine When the molding is finished theoperator removes the completed artifact Such a complexmotion sequence includes a series of motion elements
32 Interpretation of OEK Definition Some key concepts inthe definition of OEK are explained as follows
(1) Operational Know-How Knowledge Operational know-how knowledge is the special knowledge that facilitates
efficient engineering operationsThis kind of knowledge doesnot originate from the literature or documents but originatesfrom skilled techniciansrsquo experience [26]
(2) Motion Combination Motion combination is the integra-tion of a series of basic operational motion elements withoutpause Motion combination is a basic form of the content ofOEK This kind of OEK comes from an individualrsquos repeatedpractice and thinking which are the most effective andconvenient motions for the specific operation For examplea proficient welding operator would use some particularmotion combination in the welding process which enablesthe operator to finish the production with high quality andquick speed
The motion combination is formalized as follows
119872119888= 11989811198982sdot sdot sdot 119898119899 (1)
where119872119888denotes the motion combination and119898
119899is a basic
motion element
(3) Motion Sequence A motion sequence is an ordered setof several motion combinations where the pause betweenmotion combinations is permitted As another form of thecontent of OEK the motion sequence represents a completeoperationmethod withwhich a skilled operator conducts themost effective operation process
The motion sequence is formalized as follows
119872119904= 11989811988611198981198862sdot sdot sdot 119898119886119895 or 119898
11988711198981198872sdot sdot sdot 119898119887119896 or sdot sdot sdot
or 11989811988911198981198892sdot sdot sdot 119898119889119897
(2)
where119872119904denotes the motion sequence 119898
119894119899119894 = 119886 119887 119889
is a basic motion element and 11989811988611198981198862sdot sdot sdot 119898119886119895 is a motion
combination
33 Representation of Engineering-OrientedOEK Knowledgeacquisition is closely related with knowledge representationfor the manipulation of acquired knowledge largely dependson how the knowledge is represented to reflect domainexpertsrsquo mental model and problem solving process [30]The main body of OEK representation is OEK contentincorporating the motion combination andmotion sequence
Mathematical Problems in Engineering 5
OEK sources identification
Human motion analysis
Scenario model establishment
Obtaining initial OEK
Structured OEK
Specific operation process
MODAPTS
Start
End
Variable precision rough set
Video analysis
Interview analysis
Motion modeling
Motion eliciting
Intent eliciting
Acquisition toolAcquisition processAcquisition phase
Intent analysis
Postprocessing
OEK sources
Figure 2 Multistage OEK acquisition framework
obtained from a skilled technician Besides this since OEKis related with the specific operation process and problemscenarios it is indispensable to integrate the scenarios intoOEK representation [22 23] The operatorrsquos intent assumesa driving role of the motions so it should be consideredin the representation of OEK Moreover the OEK obtainedfrom an individual experience is not always reliable so acredibility score should be given to indicate the reliability ofOEK Taking the above factors into account a complete OEKrepresentation should include the problem scenarios con-tributorrsquos information core content intent and creditabilityas shown in the following formula
⟨OEK⟩ = ⟨problem scenarios contributor content
intent creditability⟩ (3)
4 Methodology
In many cases skilled technicians are not aware of theOEK they possess and how this knowledge can be sharedwith others In the problem solving the technicianrsquos OEKis activated by the factors of problem context to realize thespecific intent In our study not only the know-how in themotion but also the intent behind the specific motion willbe elicited The completed OEK is not obtained until theintents matching the specific actions are elicited because it
is difficult to finish the OEK elicitation process from theoperatorrsquos practical action to the structured OEK in onlyone step we present a novel multistage OEK acquisitionframework as shown in Figure 2 The framework consistsof five phases which are (1) the stage of OEK sourcesidentification (2) the stage of motion analysis (3) the stageof motion eliciting (4) the stage of intent analysis and (5)the stage of postprocessing
The following knowledge acquisition techniques are usedin the framework humanmotion analysismotion elicitationand standard interview In the previous literatures each ofthem has been used separately However we construct anew data fusion analysis method which combines the threeeffectively and overcomes each onersquos weak point
In the stage of OEK sources identification the rightmanufacturing process or engineering problem is selected asthe source of OEK acquisition
In the stage of motion analysis an engineerrsquos operation inspecific manufacturing process is captured and modeled Atfirst an engineering problem in the manufacturing process isselected as theOEK source And then the operatorrsquos operationis recorded by the video At last the motion and scenariomodel are established by means of MODAPTS [31]
The target of the stage of motion elicitation is to obtainthe OEK content The variable precision rough set algorithmis used to elicit such knowledge
6 Mathematical Problems in Engineering
In the stage of intent analysis we use the standard inter-view to recognize the real intention of an expertrsquos motionTheexpertrsquos motion matching the right intent will be retained
In the postprocessing stage the problem scenarios con-tributorrsquos information and knowledge credibility are inte-grated with theOEK contentThe structuredOEK is acquiredand the OEK acquisition process is finished
5 Description of OEK Acquisition Method
51 Identification of OEK Sources The aim of eliciting theOEK is to extract and store the skilled operatorrsquos know-how and train the novice operators The complex opera-tional process difficult to grasp becomes the appropriatecandidate of OEK sources The skilled techniciansrsquo OEKin such process will be used to support novice trainingMoreover the workflows needing to be optimized to increasethe productivity are also the potential candidate of OEKsources The expertsrsquo OEK will be valuable to aid workflowsredesign and optimization
52 Motion Analysis and Modeling The aim of this phase isto decompose the operation of operators into basic motionelements and then establish the motion and scenario model
The operation is difficult to be accurately representedand quantitatively analyzed by direct observation [24] Thespecific motion analysis tool is exploited to describe andexplain the workerrsquos operation [9] The result of motionanalysis can be used as the foundation of motion elicitationin the next stage
There are four steps in this phase
(1)Motion CaptureThemotion capture is based on the stereovision technique It is introduced not only to acquire the timeseries posture data of engineers operating some equipment ormachines but also to obtain the time varying relative positionbetween the hand position and operated equipment [5]
In this step firstly stereo vision cameras are set onthe appropriate place and calibrated Secondly the motionscapture software on the PC to record the real operation of theoperator At the same time shooting the operator by the videocamera is started It is important for video camera to take aposition that does not disturb motion capture and cover thewhole body of the expert engineer
(2) Motion Modeling In this step the human motion isbroken down into the basic motion elements based on thevideo shooting the operators In production managementfield the methods of motion analysis include therbligsMTM (methods-time measurement) [32] MOST (Maynardoperation sequence technique) [33] and MODAPTS (Themodular arrangement of predetermined time standards)
The MODAPTS is a method used to analyze the perfor-mance of manual work [31] In this paper the MODAPTSis selected to conduct the motion analysis and modelingdue to its advantages over others First MODAPTS namedldquothe language of workrdquo is a useful tool of motion analysiswhich can analyze the body motions required in a worktask and the time those motions require in standard motion
representation [34] Second MODAPTS is a simple logiceffective and low-cost motion analysis method and can beused with the aid of a desktop computer [35]
The MODAPTS has two distinguishing features elementmotion classes expressed in alphabetic form and timevalues expressed in units called ldquoMODSrdquo The movementclass denoted as ldquoMoverdquo (M) comprises motions done bybody parts such as the finger hand or arm The ldquoterminalrdquoclass comprising motions done at the end of an activityconsists of two kinds of activities Get (G) and Put (P) Theldquoauxiliaryrdquo class comprises motions that are not performedusing body parts such as walking sitting standing decidingand inspecting [36]
(3) Scenarios Modeling In the field of knowledge man-agement and knowledge engineering constructing scenariomodels will facilitate knowledge acquisition and reuse [37]Scenarios model can be used to describe the complexityof engineering problem solving process and is importantfoundation of knowledge sharing and reuse [38] Scenariosusually have characteristic elements such as the presupposedsetting agents or actors goals or objectives and sequences ofactions and events [39]
In our study the scenarios model integrates processinggoals and their subgoals and agents and their actions Inthe scenarios model agents and their actions representingthe operatorsrsquo motion combination or motion sequence arethe essential elements and are used for eliciting skillfuloperatorsrsquo OEK content during the next stage The goal andsubgoals in the model describe the different goalsrsquo level ofprocess
In the manufacturing process the factors of ldquoman-machine interactionrdquo (scenario factors for short) shouldbe considered in the scenarios model The man-machineinteraction explains the relationship between operator andmachine The special way of interaction between operatorsand machines or tools may be the potential technical know-how of skillful operators for example the choice of toolsand the preparation before processing These factors do notbelong to the motion combination or motion sequence andthen are thorny to be described in the motion model Thesefactors are added to the scenario model
The integrated scenarios model is shown in Figure 3 Themodel includes goals and subgoals of operation agents andtheir actions and story line Specifically the goal and subgoalsdescribe the detailed production processThe agents and theiractions represent the technicianrsquos operation which can beused to elicit technicianrsquos OEK The story line presents thesequence of operation such information is often provided inthe operation instructions
(4) Establishing the Integrated Model The information ofproduct quality is added to the scenario model in this stepAnd then the integrated model is established as shown inFigure 4
Up till now the completed information including oper-ational process and result is established in the integratedmodel which can be used as the fundament of motionelicitation in the next stage
Mathematical Problems in Engineering 7
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action MessageactionAgent
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
Spec
ific c
onte
nt o
f go
alSp
ecifi
c con
tent
of
goal
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Subg
oal 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
middot middot middot
Figure 3 The scenario model
53 Motion Elicitation Motion elicitation is the critical stagein the OEK acquisition framework The aim of motion elic-itation is to obtain the expertrsquos critical motion and scenariofactors affecting product qualityThe variable precision roughset (VPRS) is a useful tool of knowledge acquisition and isemployed to elicit OEK in our study [40 41]
As a mathematical methodology rough sets provide apowerful tool for data analysis and knowledge discoveryfrom imprecise and ambiguous data [42] The rough setstheory has been successfully applied in diverse areas suchas knowledge acquisition forecasting modeling and datamining The variable precision rough set (VPRS) model is anextension of the original rough set model The main idea ofVPRS is to allow objects to be classified with an error smallerthan a certain predefined level [43]
531 Some Definitions Related to VPRS VPRS operates onwhat may be described as a knowledge representation systemor information system [22 23 44] An information system isa 4-tuple 119878 = (119880 119860 119881 119891) where
119880 is a nonempty finite set of objects119860 is a nonempty finite set of attributes we have 119860 =
119862 cup 119863 and 119862 cap 119863 = 120593 where 119862 is a nonempty setof condition attributes and 119863 is a nonempty set ofdecision attributes119881 is the union of attribute domains that is 119881 =
cup119886isin119860119881119886 where 119881
119886is a finite attribute domain and the
elements of 119881119886are called value of attribute 119886
119891 119880 times 119860 rarr 119881 is an information function whichassociates a unique value of each attribute with eachobject belonging to 119880 that is forall119886 isin 119860 and forall119909 isin 119880119891(119909 119886) isin 119881
119886
Suppose that information system 119878 = (119880 119860 119881 119891) witheach subset 119885 sube 119880 and an equivalence relation 119877 referredto as an indiscernibility relation corresponds to partition-ing of 119880 into a collection of equivalence classes 119880119877 =
1198641 1198642 119864
119899 which represents that 119880 could be divided
into 119899 subsets of 1198641 1198642 119864
119899according to equivalence
relation 119877 We will assume that all sets under consideration
8 Mathematical Problems in Engineering
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Su
bgoa
l 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
ldquoPro
duct
qua
lityrdquo
Spec
ific f
acto
rs
Parameter A 1
Parameter A 2
Parameter A n
Parameter C 1
Parameter C 2
Parameter C n
Parameter B 1
Parameter B 2
Parameter B n
middot middot middot
ActionAgent
Messageaction
Figure 4 The integrated model
are finite and nonempty The variable precision rough setsapproach to data analysis hinges on two basic conceptsnamely the 120573-lower and the 120573-upper approximations of aset The 120573-lower and the 120573-upper approximations can also bepresented in an equivalent form as shown belowThe 120573-lowerapproximation of the set 119885 sube 119880 and 119875 sube 119862 is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)le120573
119909119894isin 119864 (119875) (4)
The 120573-upper approximation of the set 119885 sube 119880 and 119875 sube 119862is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)lt1minus120573
119909119894isin 119864 (119875) (5)
where 119864(sdot) denotes a set of equivalence classes (in the abovedefinitions they are condition classes based on a subset ofattributes 119875) Consider
119885 sub 119864 (119863)
119875119903(119885 | 119909
119894) =
Card (119885 cap 119909119894)
Card (119883119894)
(6)
Based on Ziarko [43] the measure of quality of classifica-tion for the VPRS model is defined as
120574 (119875119863 120573) =
Card (⋃1minus119875119903(119885|119909119894)
119909119894isin 119864 (119875))
Card (119880) (7)
Mathematical Problems in Engineering 9
where 119885 sube 119864(119863) and 119875 sube 119862 for a specified value of 120573The value 120574(119875119863 120573) measures the proportion of objects inthe universe (119880) for which a classification (based on decisionattributes119863) is possible at the specified value of 120573
532 VPRS Knowledge Extraction Algorithm The LEM2algorithm proposed by Grzymala-Busse [45] is one of themost widely used algorithms and many real-world applica-tions use this algorithm to extract knowledge The VPRSknowledge extraction algorithm (VPRS-KE) originated fromLEM2 and took the inclusion errors into account [46] Inour study VPRS-KE is used to elicit the specific motion andscenario factors in the technicianrsquos operation
In the VPRS-KE a heuristic strategy is used in thealgorithm to extract a minimum set of rules All of positiveregions and boundary region subsets can be denoted by 119884for each 119870 isin 119884 (the decision connecting with region 119870 is119863) Given that 119862 = 119888
1and 1198882and sdot sdot sdot and 119888
119899is the conjunction
of 119899 elementary conditions the objects in the decision tablecovered by 119862 can be expressed as follows
[119862] is the cover of rule 119862 on the decision table[119862]+
119870= [119862] cap 119870 is the positive cover of 119862 on119870
[119862]minus
119870= [119862] cap (119880 minus119870) is the negative cover of 119862 on119870
A decision rule is denoted by 119903The procedure of the rule extraction is summarized in
VPRS knowledge extraction algorithm as follows
Input119870 each of the positive regions or the boundaryregions subset in 119884 (119870 isin 119884) 120573 is the allowedinclusion error for VPRSOutput 119877 set of rules extracted from region119870Step 1 119866 larr 119870 119877 larr Φ
Step 2 While 119866 = Φ
Step 3 BeginStep 4 Initialize the condition set of a rule with anempty set 119862 larr Φ
Step 5 Initialize 119862Current with all the attributes andtheir values in 119866
119862Current larr997888 119888 [119888] cap 119866 = Φ (8)
Step 6 Iteratively add conditions to 119862 until set [119862] isincluded in the set119870with an inclusion error threshold120573
While (119862 = 120593) Or (119890([119862] 119870) le 120573) doBeginSelect 119886 isin 119862Current such that card([119886] cap 119866) ismaximumIf ties occur select 119886with the smallest card([119886])and if further ties occur select the first 119886 fromthe listAdd condition 119886 to 119862
119862 larr997888 119862 cup 119886 (9)
Eliminate the conditions which have beenalready used
119862Current larr997888 119888 [119888] cap 119866 = Φ (10)
Update 119862Current
119862Current larr997888 119862Current minus 119862 (11)
End
Step 7 Delete the redundant conditions
For each 119886 isin 119862 doIf 119890([119862 minus 119886] 119870) le 120573
Then 119862 larr997888 119862 minus 119886 (12)
End For
Step 8 Create a rule 119903 based on 119862 and put the ruleinto 119877
119877 larr997888 119877 cup 119903 (13)
Step 9 Remove the objects covered by 119877 from 119866
119866 larr997888 119866 minus ⋃
119903isin119877
[119903] (14)
Step 10 EndStep 11 Delete the redundant rules
For each 119903 isin 119877 do
If 119870 sube ⋃
119878isin(119877minus119903)
[119904] Then 119877 larr997888 119877 minus 119903 (15)
End For
Step 12 Output 119877
54 Intent Recognition In cognitive psychology intent refersto the thoughts one has before producing an action [47]Intent recognition is to identify the goal of observed sequenceofmotions and is performed by the action agent It is a processby which an agent can gain access to the goals of another andpredict its future actions and trajectories The understandingof human intent based on human motions remains a highlyrelevant and challenging research topic [48]
In our study the standard interview is employed todetect the underlying intent behind humanmotion First theskilled operators are interviewed to evaluate OEK contentand explain the specific intent behind the motion Secondthe advantage of skillful operations and the disadvantage ofunskillful operations will be recognized
55 Postprocessing In the postprocessing the related fac-tors of problem scenarios contributors and creditabilityare integrated into the OEK content and the completedrepresentation of OEK is constructed
10 Mathematical Problems in Engineering
Table 2 MODAPTS representation of operatorrsquos welding process fragment
Number Motion of left hand Motion of right handDiscomposed
motion descriptionMOD
representationDiscomposed
motion descriptionMOD
representation1 Grasp the pipe M4G1
2 Insert the pipe andadjust its position M4P2 Prepare the
welding gun M3P2
3 Hold the pipe H Start spot welding M1P0 times 119899
Figure 5 Shooting operatorrsquos operation
6 Case Study
In our study a manual welding case is used to illustrate theproposed OEK acquisitionmethodThis case originates froma real manufacturing companyrsquos production improvementproject
61 Identification of OEK Sources SQ company is a producerof new energy devices The main product of company isLNG (Liquefied Natural Gas) cylinders The welding processis widely used in the cylindersrsquo manufacturing The head ofinner vessel due to its complex internal structure cannot bemanufactured by autowelding Therefore manual welding isemployed in this process (Figure 5)
In actual manufacturing the varying quality of theproduct causes much trouble for the company The majorreason for the productrsquos quality variation lies in the differentwelding methods used by the workers Because the trainingof new employees needs a long time there are always novicesand skilled operators in the company Although the companyprovides the standard operation instructions the novicesusually find it hard to grasp the technique know-how Forthe skilled operators they often feel difficult to tell what theirempirical knowledge is and what kind of operation is the bestin guiding the novice Therefore it is an urgent mission toanalyze the operational know-how of the skilled operatorsand elicit their OEK
62 Motion Modeling
Step 1 (motion capture) Fifteen skilled technicians andfifteen novices were invited to take part in the case In this
step motion capture was carried out in the real operationsituation as shown in Figure 5 It is important for the videocamera to take a position that does not disturb the workerrsquosoperation In our study the wearable sensors were not chosensince they often burden theworker and affect human thinking[24]
Step 2 (motion analysis) TheMODAPTS analysis can trans-late the welding operation into basic motion element classcodes and time values through video examination [9] Forexample in an assembly process the operatorrsquos motionsequence includes ldquomove the left hand to the componentrdquoldquoget the componentrdquo ldquomove the componentrdquo and ldquoput thecomponentrdquo which are assigned the codes M3 G1 M3 andP1 respectively Thus the resulting motion MODAPTS isM3G1M3P1
In our study the welding process is represented alphanu-merically as motion element sets by means of IEMS softwareFigure 6 illustrates an example of a MODAPTS for sequen-tial welding operations consisting of grasping insertingadjusting and welding operations Table 2 presents theMOD representation of a fragment of the operatorrsquos weldingprocess
Step 3 (establish scenario model) In this step the result ofMODAPTS analysis is used to construct the scenario modelThe operatorrsquos motion combination andmotion sequence arethemain part of the scenariomodelThe goal and subgoals ofthe operator are the assistant part of scenario model
The scenario factors are considered in the scenariomodelIn our case the ldquoman-machine interactionrdquo includes twoparts the interaction between operator and objective and theinteraction between operator and tools
In the part of man-object interaction the factors consistof the position of the welding arc starting point the numberof rotations welding a pipe and the welding mode
In the part ofman-tool interaction the factors include thewelding gun posture in the difficult process part
The scenario model is shown in Figure 7
Step 4 (establish integrated model) The integrated modelis established by attaching the quality information of eachoperation to the scenario model
In the case the quality of welding process is evaluated bythe standard of the enterpriseThe evaluation criteria includethe weld surface color and the quality of the weld seam Theweld colors include white yellow and blackWhite is the best
Mathematical Problems in Engineering 11
(a) A case of welding process
② M3④ M1④ P2
③ P2
① M4
③ M4② G1
⑤ H
② M3
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0
(b) A MODAPTS analysis of welding process
Figure 6 The MODAPTS analysis of a welding process fragment
and black is the worst In addition the weld surface quality isdivided into three classes good medium and poor
The integrated model is shown in Figure 8
63 OEK Content Eliciting
(1) PreprocessingThe preprocessing is the fundamental of theeliciting algorithm in the next stage
According to the characteristics of motion sequence andthe requirement of VPRS algorithm the following steps areconducted
Step 1 Remove themeaninglessmotionswhich have nothingto do with the operation such as drinking and talking
Step 2 Combine the repetitive motions for example com-bining M2P1M2P1M2P1 into M2P1 times 3 If the repetitive timeofmotion combination ismore than 3 the time is representedas 119899
The structured result of preprocessing is shown in Table 3The explanation of header of Table 3 is as follows ID indicateseach operator Steps indicate the subgoals in the operationalprocess Arcing point the number of rotations and modechoosing are scenario factors Color and surface quality arethe evaluation indices of welding process quality In thecontent of table null indicates no operation in the step
(2) Eliciting Process In this step the initial OEK content iselicited by means of VPRS based on the result of preprocess-ing and is shown in Table 4
64 Intent Analysis In this case the skilled technicians whoparticipated in the experiment were interviewed to explainthe specific intent behind the motion The evaluation factorsnecessity and intent of the motions are listed in Table 5
65 Postprocessing In this stage the related factors of prob-lem scenarios contributors and creditability are integratedinto the OEK content A completed representation of theskilled operatorsrsquo OEK is obtained from the above stagesThestructured representation of OEK is shown in Table 6
7 Discussion
71 Comparison of OEK between Skilled Technicians andNovices The OEK obtained by our method is the specificknow-how coming from the experience of skilled operatorsuch knowledge indicates themotional difference in the criti-cal operational steps between skilled and unskilled operatorsIn this section wewill discuss such difference between skilledoperatorsrsquo OEK and novicesrsquo motions in order to evaluate thevalue of OEK
We analyze the difference from two aspects of timeconsumption and energy consumption performance in thesame operating procedures (Step 3 Step 5 and Step 6)We calculate the operatorsrsquo time from the operation videosIn order to measure the energy consumption of differentoperators CATIA as leading human factors engineeringsoftware is used as the platform to model the human motionand provide the energy consumption Figure 9 is the CATIAsimulation of different operators The results are shown inFigure 10
The difference of time consumption (156 s and 105 s)between skilled and unskilled operators is obvious accordingto Figure 10(a) However to our surprise the energy con-sumption of unskilled operators is more than three times thatof skilled operators (1190 cal and 313 cal see Figure 10(b))The plausible explanation is the importance of OEK whichnot only improves the product quality but also releases theoperatorsrsquo fatigue and then increases the operatorsrsquo safetyFurthermore the result of comparison demonstrates theaccuracy of OEK acquired by our method
72 Comparison of Our Method with Related Works Theevaluation framework of requirements of elicitation tech-nique is used in our study It is regarded as a reasonable andacceptablemethod to evaluate elicitation technique althoughit is a qualitative evaluation method [49] The evaluationframework includes four factors (elicitor informant problemdomain and elicitation process) and each factor includessome detailed attributes In the evaluation framework acompiled technique adequacy table is used to select the mostadequate techniques for a specific application context [50]In this section the evaluation framework is revised and usedto compare our study with related works in the context of
12 Mathematical Problems in Engineering
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
Processed objects
M3
No 1 pipe
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
Num
ber 1
pip
e weld
ing
Weld
ing
prep
arat
ion
Weld
ing
Posit
ion
Weld
ing
mat
eria
ls pr
epar
atio
n
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
P2
M1
G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
Welding
M1
G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
M
an-m
achi
ne in
tera
ctio
n
Hum
an-a
rtifa
cts
inte
ract
ion
ldquoSub
goalrdquo
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
t
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Ges
ture
of h
oldi
ng
tool
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
D3 D3 D3
6 12 12
Combination Combination Succession
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middotmiddot middot middot
Figure 7 The scenario model of the case
Mathematical Problems in Engineering 13
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
ProcessedobjectsM3
Number 1
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
ldquoSub
goalrdquo
Num
ber 1
pip
e weld
ing
ldquoSub
goalrdquo
Weld
ing
prep
arat
ion
ldquoSub
goalrdquo
Weld
ing
ldquoSub
goalrdquo
Posit
ion
ldquoSub
goalrdquo
Weld
ing
mat
eria
lspr
epar
atio
n
Subg
oal 2
Subg
oal 1
Subg
oal 1
P2
M1G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
WeldingM1G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
Man
-mac
hine
inte
ract
ion
Hum
an-a
rtifa
cts
inte
ract
ion
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
tG
estu
re o
fho
ldin
g to
ol
Subg
oal 2
Subg
oal 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
ldquoQua
lity
fact
orsrdquo
The q
ualit
y of
weld
ing
The s
urfa
ce q
ualit
yof
weld
ing
The c
olor
of
weld
ing
D3 D3 D3
6 12 12
Combination Combination Succession
Black Black Black
Non-well-distributed
Well-distributed
Well-distributed
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middot middot middot middot
pipe
Figure 8 The integrated model of the case
14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
(a) Motion combanation (b) Motion sequence
Figure 1 Examples of motion combanition and motion sequence
on the interview seriously and may reduce the effectivenessof knowledge acquisition Nguyen and Zhang [2] extractedhigh-level knowledge rules from low level sensor signals bymeans of an unsupervised approach in the service Theirstudy focused on the activities of person and lacked explicitmotion descriptionThemixed method integrates the advan-tages of qualitative and quantitative methods and may besuitable to obtain the operational know-how of experts
In summary the explicit definition and representationof engineering-oriented operational knowledge are absent inthe existing literatures Such reasons have limited the devel-opment of standardized and effective knowledge acquisitionapproach Our study aims to overcome these obstacles andpresent a novel and useful knowledge acquisition frameworkby means of mixed method In the next section the formaldefinition and representation of OEK are introduced
3 Definition and Representation of OEK
31 Definition of OEK In this paper the engineering-oriented OEK is defined as follows
Engineering-oriented OEK is the operational know-how comprising the specific motion combination motionsequence formed during the repeated practice and thinkingof an individual which are of value for bettering the produc-tion process
In the manufacturing process some manual operationsare very simple For example in the drilling operation anoperator only repeats the simple motion combination ldquopulland pushrdquo as shown in Figure 1(a) In other cases theoperation can be more complex For example in the moldingoperation shown in Figure 1(b) the operator uses his lefthand to grasp a number of parts placing them into a moldand rowing them against the mold while his right handoperates the machine When the molding is finished theoperator removes the completed artifact Such a complexmotion sequence includes a series of motion elements
32 Interpretation of OEK Definition Some key concepts inthe definition of OEK are explained as follows
(1) Operational Know-How Knowledge Operational know-how knowledge is the special knowledge that facilitates
efficient engineering operationsThis kind of knowledge doesnot originate from the literature or documents but originatesfrom skilled techniciansrsquo experience [26]
(2) Motion Combination Motion combination is the integra-tion of a series of basic operational motion elements withoutpause Motion combination is a basic form of the content ofOEK This kind of OEK comes from an individualrsquos repeatedpractice and thinking which are the most effective andconvenient motions for the specific operation For examplea proficient welding operator would use some particularmotion combination in the welding process which enablesthe operator to finish the production with high quality andquick speed
The motion combination is formalized as follows
119872119888= 11989811198982sdot sdot sdot 119898119899 (1)
where119872119888denotes the motion combination and119898
119899is a basic
motion element
(3) Motion Sequence A motion sequence is an ordered setof several motion combinations where the pause betweenmotion combinations is permitted As another form of thecontent of OEK the motion sequence represents a completeoperationmethod withwhich a skilled operator conducts themost effective operation process
The motion sequence is formalized as follows
119872119904= 11989811988611198981198862sdot sdot sdot 119898119886119895 or 119898
11988711198981198872sdot sdot sdot 119898119887119896 or sdot sdot sdot
or 11989811988911198981198892sdot sdot sdot 119898119889119897
(2)
where119872119904denotes the motion sequence 119898
119894119899119894 = 119886 119887 119889
is a basic motion element and 11989811988611198981198862sdot sdot sdot 119898119886119895 is a motion
combination
33 Representation of Engineering-OrientedOEK Knowledgeacquisition is closely related with knowledge representationfor the manipulation of acquired knowledge largely dependson how the knowledge is represented to reflect domainexpertsrsquo mental model and problem solving process [30]The main body of OEK representation is OEK contentincorporating the motion combination andmotion sequence
Mathematical Problems in Engineering 5
OEK sources identification
Human motion analysis
Scenario model establishment
Obtaining initial OEK
Structured OEK
Specific operation process
MODAPTS
Start
End
Variable precision rough set
Video analysis
Interview analysis
Motion modeling
Motion eliciting
Intent eliciting
Acquisition toolAcquisition processAcquisition phase
Intent analysis
Postprocessing
OEK sources
Figure 2 Multistage OEK acquisition framework
obtained from a skilled technician Besides this since OEKis related with the specific operation process and problemscenarios it is indispensable to integrate the scenarios intoOEK representation [22 23] The operatorrsquos intent assumesa driving role of the motions so it should be consideredin the representation of OEK Moreover the OEK obtainedfrom an individual experience is not always reliable so acredibility score should be given to indicate the reliability ofOEK Taking the above factors into account a complete OEKrepresentation should include the problem scenarios con-tributorrsquos information core content intent and creditabilityas shown in the following formula
⟨OEK⟩ = ⟨problem scenarios contributor content
intent creditability⟩ (3)
4 Methodology
In many cases skilled technicians are not aware of theOEK they possess and how this knowledge can be sharedwith others In the problem solving the technicianrsquos OEKis activated by the factors of problem context to realize thespecific intent In our study not only the know-how in themotion but also the intent behind the specific motion willbe elicited The completed OEK is not obtained until theintents matching the specific actions are elicited because it
is difficult to finish the OEK elicitation process from theoperatorrsquos practical action to the structured OEK in onlyone step we present a novel multistage OEK acquisitionframework as shown in Figure 2 The framework consistsof five phases which are (1) the stage of OEK sourcesidentification (2) the stage of motion analysis (3) the stageof motion eliciting (4) the stage of intent analysis and (5)the stage of postprocessing
The following knowledge acquisition techniques are usedin the framework humanmotion analysismotion elicitationand standard interview In the previous literatures each ofthem has been used separately However we construct anew data fusion analysis method which combines the threeeffectively and overcomes each onersquos weak point
In the stage of OEK sources identification the rightmanufacturing process or engineering problem is selected asthe source of OEK acquisition
In the stage of motion analysis an engineerrsquos operation inspecific manufacturing process is captured and modeled Atfirst an engineering problem in the manufacturing process isselected as theOEK source And then the operatorrsquos operationis recorded by the video At last the motion and scenariomodel are established by means of MODAPTS [31]
The target of the stage of motion elicitation is to obtainthe OEK content The variable precision rough set algorithmis used to elicit such knowledge
6 Mathematical Problems in Engineering
In the stage of intent analysis we use the standard inter-view to recognize the real intention of an expertrsquos motionTheexpertrsquos motion matching the right intent will be retained
In the postprocessing stage the problem scenarios con-tributorrsquos information and knowledge credibility are inte-grated with theOEK contentThe structuredOEK is acquiredand the OEK acquisition process is finished
5 Description of OEK Acquisition Method
51 Identification of OEK Sources The aim of eliciting theOEK is to extract and store the skilled operatorrsquos know-how and train the novice operators The complex opera-tional process difficult to grasp becomes the appropriatecandidate of OEK sources The skilled techniciansrsquo OEKin such process will be used to support novice trainingMoreover the workflows needing to be optimized to increasethe productivity are also the potential candidate of OEKsources The expertsrsquo OEK will be valuable to aid workflowsredesign and optimization
52 Motion Analysis and Modeling The aim of this phase isto decompose the operation of operators into basic motionelements and then establish the motion and scenario model
The operation is difficult to be accurately representedand quantitatively analyzed by direct observation [24] Thespecific motion analysis tool is exploited to describe andexplain the workerrsquos operation [9] The result of motionanalysis can be used as the foundation of motion elicitationin the next stage
There are four steps in this phase
(1)Motion CaptureThemotion capture is based on the stereovision technique It is introduced not only to acquire the timeseries posture data of engineers operating some equipment ormachines but also to obtain the time varying relative positionbetween the hand position and operated equipment [5]
In this step firstly stereo vision cameras are set onthe appropriate place and calibrated Secondly the motionscapture software on the PC to record the real operation of theoperator At the same time shooting the operator by the videocamera is started It is important for video camera to take aposition that does not disturb motion capture and cover thewhole body of the expert engineer
(2) Motion Modeling In this step the human motion isbroken down into the basic motion elements based on thevideo shooting the operators In production managementfield the methods of motion analysis include therbligsMTM (methods-time measurement) [32] MOST (Maynardoperation sequence technique) [33] and MODAPTS (Themodular arrangement of predetermined time standards)
The MODAPTS is a method used to analyze the perfor-mance of manual work [31] In this paper the MODAPTSis selected to conduct the motion analysis and modelingdue to its advantages over others First MODAPTS namedldquothe language of workrdquo is a useful tool of motion analysiswhich can analyze the body motions required in a worktask and the time those motions require in standard motion
representation [34] Second MODAPTS is a simple logiceffective and low-cost motion analysis method and can beused with the aid of a desktop computer [35]
The MODAPTS has two distinguishing features elementmotion classes expressed in alphabetic form and timevalues expressed in units called ldquoMODSrdquo The movementclass denoted as ldquoMoverdquo (M) comprises motions done bybody parts such as the finger hand or arm The ldquoterminalrdquoclass comprising motions done at the end of an activityconsists of two kinds of activities Get (G) and Put (P) Theldquoauxiliaryrdquo class comprises motions that are not performedusing body parts such as walking sitting standing decidingand inspecting [36]
(3) Scenarios Modeling In the field of knowledge man-agement and knowledge engineering constructing scenariomodels will facilitate knowledge acquisition and reuse [37]Scenarios model can be used to describe the complexityof engineering problem solving process and is importantfoundation of knowledge sharing and reuse [38] Scenariosusually have characteristic elements such as the presupposedsetting agents or actors goals or objectives and sequences ofactions and events [39]
In our study the scenarios model integrates processinggoals and their subgoals and agents and their actions Inthe scenarios model agents and their actions representingthe operatorsrsquo motion combination or motion sequence arethe essential elements and are used for eliciting skillfuloperatorsrsquo OEK content during the next stage The goal andsubgoals in the model describe the different goalsrsquo level ofprocess
In the manufacturing process the factors of ldquoman-machine interactionrdquo (scenario factors for short) shouldbe considered in the scenarios model The man-machineinteraction explains the relationship between operator andmachine The special way of interaction between operatorsand machines or tools may be the potential technical know-how of skillful operators for example the choice of toolsand the preparation before processing These factors do notbelong to the motion combination or motion sequence andthen are thorny to be described in the motion model Thesefactors are added to the scenario model
The integrated scenarios model is shown in Figure 3 Themodel includes goals and subgoals of operation agents andtheir actions and story line Specifically the goal and subgoalsdescribe the detailed production processThe agents and theiractions represent the technicianrsquos operation which can beused to elicit technicianrsquos OEK The story line presents thesequence of operation such information is often provided inthe operation instructions
(4) Establishing the Integrated Model The information ofproduct quality is added to the scenario model in this stepAnd then the integrated model is established as shown inFigure 4
Up till now the completed information including oper-ational process and result is established in the integratedmodel which can be used as the fundament of motionelicitation in the next stage
Mathematical Problems in Engineering 7
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action MessageactionAgent
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
Spec
ific c
onte
nt o
f go
alSp
ecifi
c con
tent
of
goal
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Subg
oal 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
middot middot middot
Figure 3 The scenario model
53 Motion Elicitation Motion elicitation is the critical stagein the OEK acquisition framework The aim of motion elic-itation is to obtain the expertrsquos critical motion and scenariofactors affecting product qualityThe variable precision roughset (VPRS) is a useful tool of knowledge acquisition and isemployed to elicit OEK in our study [40 41]
As a mathematical methodology rough sets provide apowerful tool for data analysis and knowledge discoveryfrom imprecise and ambiguous data [42] The rough setstheory has been successfully applied in diverse areas suchas knowledge acquisition forecasting modeling and datamining The variable precision rough set (VPRS) model is anextension of the original rough set model The main idea ofVPRS is to allow objects to be classified with an error smallerthan a certain predefined level [43]
531 Some Definitions Related to VPRS VPRS operates onwhat may be described as a knowledge representation systemor information system [22 23 44] An information system isa 4-tuple 119878 = (119880 119860 119881 119891) where
119880 is a nonempty finite set of objects119860 is a nonempty finite set of attributes we have 119860 =
119862 cup 119863 and 119862 cap 119863 = 120593 where 119862 is a nonempty setof condition attributes and 119863 is a nonempty set ofdecision attributes119881 is the union of attribute domains that is 119881 =
cup119886isin119860119881119886 where 119881
119886is a finite attribute domain and the
elements of 119881119886are called value of attribute 119886
119891 119880 times 119860 rarr 119881 is an information function whichassociates a unique value of each attribute with eachobject belonging to 119880 that is forall119886 isin 119860 and forall119909 isin 119880119891(119909 119886) isin 119881
119886
Suppose that information system 119878 = (119880 119860 119881 119891) witheach subset 119885 sube 119880 and an equivalence relation 119877 referredto as an indiscernibility relation corresponds to partition-ing of 119880 into a collection of equivalence classes 119880119877 =
1198641 1198642 119864
119899 which represents that 119880 could be divided
into 119899 subsets of 1198641 1198642 119864
119899according to equivalence
relation 119877 We will assume that all sets under consideration
8 Mathematical Problems in Engineering
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Su
bgoa
l 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
ldquoPro
duct
qua
lityrdquo
Spec
ific f
acto
rs
Parameter A 1
Parameter A 2
Parameter A n
Parameter C 1
Parameter C 2
Parameter C n
Parameter B 1
Parameter B 2
Parameter B n
middot middot middot
ActionAgent
Messageaction
Figure 4 The integrated model
are finite and nonempty The variable precision rough setsapproach to data analysis hinges on two basic conceptsnamely the 120573-lower and the 120573-upper approximations of aset The 120573-lower and the 120573-upper approximations can also bepresented in an equivalent form as shown belowThe 120573-lowerapproximation of the set 119885 sube 119880 and 119875 sube 119862 is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)le120573
119909119894isin 119864 (119875) (4)
The 120573-upper approximation of the set 119885 sube 119880 and 119875 sube 119862is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)lt1minus120573
119909119894isin 119864 (119875) (5)
where 119864(sdot) denotes a set of equivalence classes (in the abovedefinitions they are condition classes based on a subset ofattributes 119875) Consider
119885 sub 119864 (119863)
119875119903(119885 | 119909
119894) =
Card (119885 cap 119909119894)
Card (119883119894)
(6)
Based on Ziarko [43] the measure of quality of classifica-tion for the VPRS model is defined as
120574 (119875119863 120573) =
Card (⋃1minus119875119903(119885|119909119894)
119909119894isin 119864 (119875))
Card (119880) (7)
Mathematical Problems in Engineering 9
where 119885 sube 119864(119863) and 119875 sube 119862 for a specified value of 120573The value 120574(119875119863 120573) measures the proportion of objects inthe universe (119880) for which a classification (based on decisionattributes119863) is possible at the specified value of 120573
532 VPRS Knowledge Extraction Algorithm The LEM2algorithm proposed by Grzymala-Busse [45] is one of themost widely used algorithms and many real-world applica-tions use this algorithm to extract knowledge The VPRSknowledge extraction algorithm (VPRS-KE) originated fromLEM2 and took the inclusion errors into account [46] Inour study VPRS-KE is used to elicit the specific motion andscenario factors in the technicianrsquos operation
In the VPRS-KE a heuristic strategy is used in thealgorithm to extract a minimum set of rules All of positiveregions and boundary region subsets can be denoted by 119884for each 119870 isin 119884 (the decision connecting with region 119870 is119863) Given that 119862 = 119888
1and 1198882and sdot sdot sdot and 119888
119899is the conjunction
of 119899 elementary conditions the objects in the decision tablecovered by 119862 can be expressed as follows
[119862] is the cover of rule 119862 on the decision table[119862]+
119870= [119862] cap 119870 is the positive cover of 119862 on119870
[119862]minus
119870= [119862] cap (119880 minus119870) is the negative cover of 119862 on119870
A decision rule is denoted by 119903The procedure of the rule extraction is summarized in
VPRS knowledge extraction algorithm as follows
Input119870 each of the positive regions or the boundaryregions subset in 119884 (119870 isin 119884) 120573 is the allowedinclusion error for VPRSOutput 119877 set of rules extracted from region119870Step 1 119866 larr 119870 119877 larr Φ
Step 2 While 119866 = Φ
Step 3 BeginStep 4 Initialize the condition set of a rule with anempty set 119862 larr Φ
Step 5 Initialize 119862Current with all the attributes andtheir values in 119866
119862Current larr997888 119888 [119888] cap 119866 = Φ (8)
Step 6 Iteratively add conditions to 119862 until set [119862] isincluded in the set119870with an inclusion error threshold120573
While (119862 = 120593) Or (119890([119862] 119870) le 120573) doBeginSelect 119886 isin 119862Current such that card([119886] cap 119866) ismaximumIf ties occur select 119886with the smallest card([119886])and if further ties occur select the first 119886 fromthe listAdd condition 119886 to 119862
119862 larr997888 119862 cup 119886 (9)
Eliminate the conditions which have beenalready used
119862Current larr997888 119888 [119888] cap 119866 = Φ (10)
Update 119862Current
119862Current larr997888 119862Current minus 119862 (11)
End
Step 7 Delete the redundant conditions
For each 119886 isin 119862 doIf 119890([119862 minus 119886] 119870) le 120573
Then 119862 larr997888 119862 minus 119886 (12)
End For
Step 8 Create a rule 119903 based on 119862 and put the ruleinto 119877
119877 larr997888 119877 cup 119903 (13)
Step 9 Remove the objects covered by 119877 from 119866
119866 larr997888 119866 minus ⋃
119903isin119877
[119903] (14)
Step 10 EndStep 11 Delete the redundant rules
For each 119903 isin 119877 do
If 119870 sube ⋃
119878isin(119877minus119903)
[119904] Then 119877 larr997888 119877 minus 119903 (15)
End For
Step 12 Output 119877
54 Intent Recognition In cognitive psychology intent refersto the thoughts one has before producing an action [47]Intent recognition is to identify the goal of observed sequenceofmotions and is performed by the action agent It is a processby which an agent can gain access to the goals of another andpredict its future actions and trajectories The understandingof human intent based on human motions remains a highlyrelevant and challenging research topic [48]
In our study the standard interview is employed todetect the underlying intent behind humanmotion First theskilled operators are interviewed to evaluate OEK contentand explain the specific intent behind the motion Secondthe advantage of skillful operations and the disadvantage ofunskillful operations will be recognized
55 Postprocessing In the postprocessing the related fac-tors of problem scenarios contributors and creditabilityare integrated into the OEK content and the completedrepresentation of OEK is constructed
10 Mathematical Problems in Engineering
Table 2 MODAPTS representation of operatorrsquos welding process fragment
Number Motion of left hand Motion of right handDiscomposed
motion descriptionMOD
representationDiscomposed
motion descriptionMOD
representation1 Grasp the pipe M4G1
2 Insert the pipe andadjust its position M4P2 Prepare the
welding gun M3P2
3 Hold the pipe H Start spot welding M1P0 times 119899
Figure 5 Shooting operatorrsquos operation
6 Case Study
In our study a manual welding case is used to illustrate theproposed OEK acquisitionmethodThis case originates froma real manufacturing companyrsquos production improvementproject
61 Identification of OEK Sources SQ company is a producerof new energy devices The main product of company isLNG (Liquefied Natural Gas) cylinders The welding processis widely used in the cylindersrsquo manufacturing The head ofinner vessel due to its complex internal structure cannot bemanufactured by autowelding Therefore manual welding isemployed in this process (Figure 5)
In actual manufacturing the varying quality of theproduct causes much trouble for the company The majorreason for the productrsquos quality variation lies in the differentwelding methods used by the workers Because the trainingof new employees needs a long time there are always novicesand skilled operators in the company Although the companyprovides the standard operation instructions the novicesusually find it hard to grasp the technique know-how Forthe skilled operators they often feel difficult to tell what theirempirical knowledge is and what kind of operation is the bestin guiding the novice Therefore it is an urgent mission toanalyze the operational know-how of the skilled operatorsand elicit their OEK
62 Motion Modeling
Step 1 (motion capture) Fifteen skilled technicians andfifteen novices were invited to take part in the case In this
step motion capture was carried out in the real operationsituation as shown in Figure 5 It is important for the videocamera to take a position that does not disturb the workerrsquosoperation In our study the wearable sensors were not chosensince they often burden theworker and affect human thinking[24]
Step 2 (motion analysis) TheMODAPTS analysis can trans-late the welding operation into basic motion element classcodes and time values through video examination [9] Forexample in an assembly process the operatorrsquos motionsequence includes ldquomove the left hand to the componentrdquoldquoget the componentrdquo ldquomove the componentrdquo and ldquoput thecomponentrdquo which are assigned the codes M3 G1 M3 andP1 respectively Thus the resulting motion MODAPTS isM3G1M3P1
In our study the welding process is represented alphanu-merically as motion element sets by means of IEMS softwareFigure 6 illustrates an example of a MODAPTS for sequen-tial welding operations consisting of grasping insertingadjusting and welding operations Table 2 presents theMOD representation of a fragment of the operatorrsquos weldingprocess
Step 3 (establish scenario model) In this step the result ofMODAPTS analysis is used to construct the scenario modelThe operatorrsquos motion combination andmotion sequence arethemain part of the scenariomodelThe goal and subgoals ofthe operator are the assistant part of scenario model
The scenario factors are considered in the scenariomodelIn our case the ldquoman-machine interactionrdquo includes twoparts the interaction between operator and objective and theinteraction between operator and tools
In the part of man-object interaction the factors consistof the position of the welding arc starting point the numberof rotations welding a pipe and the welding mode
In the part ofman-tool interaction the factors include thewelding gun posture in the difficult process part
The scenario model is shown in Figure 7
Step 4 (establish integrated model) The integrated modelis established by attaching the quality information of eachoperation to the scenario model
In the case the quality of welding process is evaluated bythe standard of the enterpriseThe evaluation criteria includethe weld surface color and the quality of the weld seam Theweld colors include white yellow and blackWhite is the best
Mathematical Problems in Engineering 11
(a) A case of welding process
② M3④ M1④ P2
③ P2
① M4
③ M4② G1
⑤ H
② M3
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0
(b) A MODAPTS analysis of welding process
Figure 6 The MODAPTS analysis of a welding process fragment
and black is the worst In addition the weld surface quality isdivided into three classes good medium and poor
The integrated model is shown in Figure 8
63 OEK Content Eliciting
(1) PreprocessingThe preprocessing is the fundamental of theeliciting algorithm in the next stage
According to the characteristics of motion sequence andthe requirement of VPRS algorithm the following steps areconducted
Step 1 Remove themeaninglessmotionswhich have nothingto do with the operation such as drinking and talking
Step 2 Combine the repetitive motions for example com-bining M2P1M2P1M2P1 into M2P1 times 3 If the repetitive timeofmotion combination ismore than 3 the time is representedas 119899
The structured result of preprocessing is shown in Table 3The explanation of header of Table 3 is as follows ID indicateseach operator Steps indicate the subgoals in the operationalprocess Arcing point the number of rotations and modechoosing are scenario factors Color and surface quality arethe evaluation indices of welding process quality In thecontent of table null indicates no operation in the step
(2) Eliciting Process In this step the initial OEK content iselicited by means of VPRS based on the result of preprocess-ing and is shown in Table 4
64 Intent Analysis In this case the skilled technicians whoparticipated in the experiment were interviewed to explainthe specific intent behind the motion The evaluation factorsnecessity and intent of the motions are listed in Table 5
65 Postprocessing In this stage the related factors of prob-lem scenarios contributors and creditability are integratedinto the OEK content A completed representation of theskilled operatorsrsquo OEK is obtained from the above stagesThestructured representation of OEK is shown in Table 6
7 Discussion
71 Comparison of OEK between Skilled Technicians andNovices The OEK obtained by our method is the specificknow-how coming from the experience of skilled operatorsuch knowledge indicates themotional difference in the criti-cal operational steps between skilled and unskilled operatorsIn this section wewill discuss such difference between skilledoperatorsrsquo OEK and novicesrsquo motions in order to evaluate thevalue of OEK
We analyze the difference from two aspects of timeconsumption and energy consumption performance in thesame operating procedures (Step 3 Step 5 and Step 6)We calculate the operatorsrsquo time from the operation videosIn order to measure the energy consumption of differentoperators CATIA as leading human factors engineeringsoftware is used as the platform to model the human motionand provide the energy consumption Figure 9 is the CATIAsimulation of different operators The results are shown inFigure 10
The difference of time consumption (156 s and 105 s)between skilled and unskilled operators is obvious accordingto Figure 10(a) However to our surprise the energy con-sumption of unskilled operators is more than three times thatof skilled operators (1190 cal and 313 cal see Figure 10(b))The plausible explanation is the importance of OEK whichnot only improves the product quality but also releases theoperatorsrsquo fatigue and then increases the operatorsrsquo safetyFurthermore the result of comparison demonstrates theaccuracy of OEK acquired by our method
72 Comparison of Our Method with Related Works Theevaluation framework of requirements of elicitation tech-nique is used in our study It is regarded as a reasonable andacceptablemethod to evaluate elicitation technique althoughit is a qualitative evaluation method [49] The evaluationframework includes four factors (elicitor informant problemdomain and elicitation process) and each factor includessome detailed attributes In the evaluation framework acompiled technique adequacy table is used to select the mostadequate techniques for a specific application context [50]In this section the evaluation framework is revised and usedto compare our study with related works in the context of
12 Mathematical Problems in Engineering
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
Processed objects
M3
No 1 pipe
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
Num
ber 1
pip
e weld
ing
Weld
ing
prep
arat
ion
Weld
ing
Posit
ion
Weld
ing
mat
eria
ls pr
epar
atio
n
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
P2
M1
G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
Welding
M1
G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
M
an-m
achi
ne in
tera
ctio
n
Hum
an-a
rtifa
cts
inte
ract
ion
ldquoSub
goalrdquo
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
t
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Ges
ture
of h
oldi
ng
tool
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
D3 D3 D3
6 12 12
Combination Combination Succession
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middotmiddot middot middot
Figure 7 The scenario model of the case
Mathematical Problems in Engineering 13
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
ProcessedobjectsM3
Number 1
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
ldquoSub
goalrdquo
Num
ber 1
pip
e weld
ing
ldquoSub
goalrdquo
Weld
ing
prep
arat
ion
ldquoSub
goalrdquo
Weld
ing
ldquoSub
goalrdquo
Posit
ion
ldquoSub
goalrdquo
Weld
ing
mat
eria
lspr
epar
atio
n
Subg
oal 2
Subg
oal 1
Subg
oal 1
P2
M1G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
WeldingM1G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
Man
-mac
hine
inte
ract
ion
Hum
an-a
rtifa
cts
inte
ract
ion
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
tG
estu
re o
fho
ldin
g to
ol
Subg
oal 2
Subg
oal 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
ldquoQua
lity
fact
orsrdquo
The q
ualit
y of
weld
ing
The s
urfa
ce q
ualit
yof
weld
ing
The c
olor
of
weld
ing
D3 D3 D3
6 12 12
Combination Combination Succession
Black Black Black
Non-well-distributed
Well-distributed
Well-distributed
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middot middot middot middot
pipe
Figure 8 The integrated model of the case
14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
OEK sources identification
Human motion analysis
Scenario model establishment
Obtaining initial OEK
Structured OEK
Specific operation process
MODAPTS
Start
End
Variable precision rough set
Video analysis
Interview analysis
Motion modeling
Motion eliciting
Intent eliciting
Acquisition toolAcquisition processAcquisition phase
Intent analysis
Postprocessing
OEK sources
Figure 2 Multistage OEK acquisition framework
obtained from a skilled technician Besides this since OEKis related with the specific operation process and problemscenarios it is indispensable to integrate the scenarios intoOEK representation [22 23] The operatorrsquos intent assumesa driving role of the motions so it should be consideredin the representation of OEK Moreover the OEK obtainedfrom an individual experience is not always reliable so acredibility score should be given to indicate the reliability ofOEK Taking the above factors into account a complete OEKrepresentation should include the problem scenarios con-tributorrsquos information core content intent and creditabilityas shown in the following formula
⟨OEK⟩ = ⟨problem scenarios contributor content
intent creditability⟩ (3)
4 Methodology
In many cases skilled technicians are not aware of theOEK they possess and how this knowledge can be sharedwith others In the problem solving the technicianrsquos OEKis activated by the factors of problem context to realize thespecific intent In our study not only the know-how in themotion but also the intent behind the specific motion willbe elicited The completed OEK is not obtained until theintents matching the specific actions are elicited because it
is difficult to finish the OEK elicitation process from theoperatorrsquos practical action to the structured OEK in onlyone step we present a novel multistage OEK acquisitionframework as shown in Figure 2 The framework consistsof five phases which are (1) the stage of OEK sourcesidentification (2) the stage of motion analysis (3) the stageof motion eliciting (4) the stage of intent analysis and (5)the stage of postprocessing
The following knowledge acquisition techniques are usedin the framework humanmotion analysismotion elicitationand standard interview In the previous literatures each ofthem has been used separately However we construct anew data fusion analysis method which combines the threeeffectively and overcomes each onersquos weak point
In the stage of OEK sources identification the rightmanufacturing process or engineering problem is selected asthe source of OEK acquisition
In the stage of motion analysis an engineerrsquos operation inspecific manufacturing process is captured and modeled Atfirst an engineering problem in the manufacturing process isselected as theOEK source And then the operatorrsquos operationis recorded by the video At last the motion and scenariomodel are established by means of MODAPTS [31]
The target of the stage of motion elicitation is to obtainthe OEK content The variable precision rough set algorithmis used to elicit such knowledge
6 Mathematical Problems in Engineering
In the stage of intent analysis we use the standard inter-view to recognize the real intention of an expertrsquos motionTheexpertrsquos motion matching the right intent will be retained
In the postprocessing stage the problem scenarios con-tributorrsquos information and knowledge credibility are inte-grated with theOEK contentThe structuredOEK is acquiredand the OEK acquisition process is finished
5 Description of OEK Acquisition Method
51 Identification of OEK Sources The aim of eliciting theOEK is to extract and store the skilled operatorrsquos know-how and train the novice operators The complex opera-tional process difficult to grasp becomes the appropriatecandidate of OEK sources The skilled techniciansrsquo OEKin such process will be used to support novice trainingMoreover the workflows needing to be optimized to increasethe productivity are also the potential candidate of OEKsources The expertsrsquo OEK will be valuable to aid workflowsredesign and optimization
52 Motion Analysis and Modeling The aim of this phase isto decompose the operation of operators into basic motionelements and then establish the motion and scenario model
The operation is difficult to be accurately representedand quantitatively analyzed by direct observation [24] Thespecific motion analysis tool is exploited to describe andexplain the workerrsquos operation [9] The result of motionanalysis can be used as the foundation of motion elicitationin the next stage
There are four steps in this phase
(1)Motion CaptureThemotion capture is based on the stereovision technique It is introduced not only to acquire the timeseries posture data of engineers operating some equipment ormachines but also to obtain the time varying relative positionbetween the hand position and operated equipment [5]
In this step firstly stereo vision cameras are set onthe appropriate place and calibrated Secondly the motionscapture software on the PC to record the real operation of theoperator At the same time shooting the operator by the videocamera is started It is important for video camera to take aposition that does not disturb motion capture and cover thewhole body of the expert engineer
(2) Motion Modeling In this step the human motion isbroken down into the basic motion elements based on thevideo shooting the operators In production managementfield the methods of motion analysis include therbligsMTM (methods-time measurement) [32] MOST (Maynardoperation sequence technique) [33] and MODAPTS (Themodular arrangement of predetermined time standards)
The MODAPTS is a method used to analyze the perfor-mance of manual work [31] In this paper the MODAPTSis selected to conduct the motion analysis and modelingdue to its advantages over others First MODAPTS namedldquothe language of workrdquo is a useful tool of motion analysiswhich can analyze the body motions required in a worktask and the time those motions require in standard motion
representation [34] Second MODAPTS is a simple logiceffective and low-cost motion analysis method and can beused with the aid of a desktop computer [35]
The MODAPTS has two distinguishing features elementmotion classes expressed in alphabetic form and timevalues expressed in units called ldquoMODSrdquo The movementclass denoted as ldquoMoverdquo (M) comprises motions done bybody parts such as the finger hand or arm The ldquoterminalrdquoclass comprising motions done at the end of an activityconsists of two kinds of activities Get (G) and Put (P) Theldquoauxiliaryrdquo class comprises motions that are not performedusing body parts such as walking sitting standing decidingand inspecting [36]
(3) Scenarios Modeling In the field of knowledge man-agement and knowledge engineering constructing scenariomodels will facilitate knowledge acquisition and reuse [37]Scenarios model can be used to describe the complexityof engineering problem solving process and is importantfoundation of knowledge sharing and reuse [38] Scenariosusually have characteristic elements such as the presupposedsetting agents or actors goals or objectives and sequences ofactions and events [39]
In our study the scenarios model integrates processinggoals and their subgoals and agents and their actions Inthe scenarios model agents and their actions representingthe operatorsrsquo motion combination or motion sequence arethe essential elements and are used for eliciting skillfuloperatorsrsquo OEK content during the next stage The goal andsubgoals in the model describe the different goalsrsquo level ofprocess
In the manufacturing process the factors of ldquoman-machine interactionrdquo (scenario factors for short) shouldbe considered in the scenarios model The man-machineinteraction explains the relationship between operator andmachine The special way of interaction between operatorsand machines or tools may be the potential technical know-how of skillful operators for example the choice of toolsand the preparation before processing These factors do notbelong to the motion combination or motion sequence andthen are thorny to be described in the motion model Thesefactors are added to the scenario model
The integrated scenarios model is shown in Figure 3 Themodel includes goals and subgoals of operation agents andtheir actions and story line Specifically the goal and subgoalsdescribe the detailed production processThe agents and theiractions represent the technicianrsquos operation which can beused to elicit technicianrsquos OEK The story line presents thesequence of operation such information is often provided inthe operation instructions
(4) Establishing the Integrated Model The information ofproduct quality is added to the scenario model in this stepAnd then the integrated model is established as shown inFigure 4
Up till now the completed information including oper-ational process and result is established in the integratedmodel which can be used as the fundament of motionelicitation in the next stage
Mathematical Problems in Engineering 7
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action MessageactionAgent
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
Spec
ific c
onte
nt o
f go
alSp
ecifi
c con
tent
of
goal
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Subg
oal 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
middot middot middot
Figure 3 The scenario model
53 Motion Elicitation Motion elicitation is the critical stagein the OEK acquisition framework The aim of motion elic-itation is to obtain the expertrsquos critical motion and scenariofactors affecting product qualityThe variable precision roughset (VPRS) is a useful tool of knowledge acquisition and isemployed to elicit OEK in our study [40 41]
As a mathematical methodology rough sets provide apowerful tool for data analysis and knowledge discoveryfrom imprecise and ambiguous data [42] The rough setstheory has been successfully applied in diverse areas suchas knowledge acquisition forecasting modeling and datamining The variable precision rough set (VPRS) model is anextension of the original rough set model The main idea ofVPRS is to allow objects to be classified with an error smallerthan a certain predefined level [43]
531 Some Definitions Related to VPRS VPRS operates onwhat may be described as a knowledge representation systemor information system [22 23 44] An information system isa 4-tuple 119878 = (119880 119860 119881 119891) where
119880 is a nonempty finite set of objects119860 is a nonempty finite set of attributes we have 119860 =
119862 cup 119863 and 119862 cap 119863 = 120593 where 119862 is a nonempty setof condition attributes and 119863 is a nonempty set ofdecision attributes119881 is the union of attribute domains that is 119881 =
cup119886isin119860119881119886 where 119881
119886is a finite attribute domain and the
elements of 119881119886are called value of attribute 119886
119891 119880 times 119860 rarr 119881 is an information function whichassociates a unique value of each attribute with eachobject belonging to 119880 that is forall119886 isin 119860 and forall119909 isin 119880119891(119909 119886) isin 119881
119886
Suppose that information system 119878 = (119880 119860 119881 119891) witheach subset 119885 sube 119880 and an equivalence relation 119877 referredto as an indiscernibility relation corresponds to partition-ing of 119880 into a collection of equivalence classes 119880119877 =
1198641 1198642 119864
119899 which represents that 119880 could be divided
into 119899 subsets of 1198641 1198642 119864
119899according to equivalence
relation 119877 We will assume that all sets under consideration
8 Mathematical Problems in Engineering
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Su
bgoa
l 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
ldquoPro
duct
qua
lityrdquo
Spec
ific f
acto
rs
Parameter A 1
Parameter A 2
Parameter A n
Parameter C 1
Parameter C 2
Parameter C n
Parameter B 1
Parameter B 2
Parameter B n
middot middot middot
ActionAgent
Messageaction
Figure 4 The integrated model
are finite and nonempty The variable precision rough setsapproach to data analysis hinges on two basic conceptsnamely the 120573-lower and the 120573-upper approximations of aset The 120573-lower and the 120573-upper approximations can also bepresented in an equivalent form as shown belowThe 120573-lowerapproximation of the set 119885 sube 119880 and 119875 sube 119862 is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)le120573
119909119894isin 119864 (119875) (4)
The 120573-upper approximation of the set 119885 sube 119880 and 119875 sube 119862is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)lt1minus120573
119909119894isin 119864 (119875) (5)
where 119864(sdot) denotes a set of equivalence classes (in the abovedefinitions they are condition classes based on a subset ofattributes 119875) Consider
119885 sub 119864 (119863)
119875119903(119885 | 119909
119894) =
Card (119885 cap 119909119894)
Card (119883119894)
(6)
Based on Ziarko [43] the measure of quality of classifica-tion for the VPRS model is defined as
120574 (119875119863 120573) =
Card (⋃1minus119875119903(119885|119909119894)
119909119894isin 119864 (119875))
Card (119880) (7)
Mathematical Problems in Engineering 9
where 119885 sube 119864(119863) and 119875 sube 119862 for a specified value of 120573The value 120574(119875119863 120573) measures the proportion of objects inthe universe (119880) for which a classification (based on decisionattributes119863) is possible at the specified value of 120573
532 VPRS Knowledge Extraction Algorithm The LEM2algorithm proposed by Grzymala-Busse [45] is one of themost widely used algorithms and many real-world applica-tions use this algorithm to extract knowledge The VPRSknowledge extraction algorithm (VPRS-KE) originated fromLEM2 and took the inclusion errors into account [46] Inour study VPRS-KE is used to elicit the specific motion andscenario factors in the technicianrsquos operation
In the VPRS-KE a heuristic strategy is used in thealgorithm to extract a minimum set of rules All of positiveregions and boundary region subsets can be denoted by 119884for each 119870 isin 119884 (the decision connecting with region 119870 is119863) Given that 119862 = 119888
1and 1198882and sdot sdot sdot and 119888
119899is the conjunction
of 119899 elementary conditions the objects in the decision tablecovered by 119862 can be expressed as follows
[119862] is the cover of rule 119862 on the decision table[119862]+
119870= [119862] cap 119870 is the positive cover of 119862 on119870
[119862]minus
119870= [119862] cap (119880 minus119870) is the negative cover of 119862 on119870
A decision rule is denoted by 119903The procedure of the rule extraction is summarized in
VPRS knowledge extraction algorithm as follows
Input119870 each of the positive regions or the boundaryregions subset in 119884 (119870 isin 119884) 120573 is the allowedinclusion error for VPRSOutput 119877 set of rules extracted from region119870Step 1 119866 larr 119870 119877 larr Φ
Step 2 While 119866 = Φ
Step 3 BeginStep 4 Initialize the condition set of a rule with anempty set 119862 larr Φ
Step 5 Initialize 119862Current with all the attributes andtheir values in 119866
119862Current larr997888 119888 [119888] cap 119866 = Φ (8)
Step 6 Iteratively add conditions to 119862 until set [119862] isincluded in the set119870with an inclusion error threshold120573
While (119862 = 120593) Or (119890([119862] 119870) le 120573) doBeginSelect 119886 isin 119862Current such that card([119886] cap 119866) ismaximumIf ties occur select 119886with the smallest card([119886])and if further ties occur select the first 119886 fromthe listAdd condition 119886 to 119862
119862 larr997888 119862 cup 119886 (9)
Eliminate the conditions which have beenalready used
119862Current larr997888 119888 [119888] cap 119866 = Φ (10)
Update 119862Current
119862Current larr997888 119862Current minus 119862 (11)
End
Step 7 Delete the redundant conditions
For each 119886 isin 119862 doIf 119890([119862 minus 119886] 119870) le 120573
Then 119862 larr997888 119862 minus 119886 (12)
End For
Step 8 Create a rule 119903 based on 119862 and put the ruleinto 119877
119877 larr997888 119877 cup 119903 (13)
Step 9 Remove the objects covered by 119877 from 119866
119866 larr997888 119866 minus ⋃
119903isin119877
[119903] (14)
Step 10 EndStep 11 Delete the redundant rules
For each 119903 isin 119877 do
If 119870 sube ⋃
119878isin(119877minus119903)
[119904] Then 119877 larr997888 119877 minus 119903 (15)
End For
Step 12 Output 119877
54 Intent Recognition In cognitive psychology intent refersto the thoughts one has before producing an action [47]Intent recognition is to identify the goal of observed sequenceofmotions and is performed by the action agent It is a processby which an agent can gain access to the goals of another andpredict its future actions and trajectories The understandingof human intent based on human motions remains a highlyrelevant and challenging research topic [48]
In our study the standard interview is employed todetect the underlying intent behind humanmotion First theskilled operators are interviewed to evaluate OEK contentand explain the specific intent behind the motion Secondthe advantage of skillful operations and the disadvantage ofunskillful operations will be recognized
55 Postprocessing In the postprocessing the related fac-tors of problem scenarios contributors and creditabilityare integrated into the OEK content and the completedrepresentation of OEK is constructed
10 Mathematical Problems in Engineering
Table 2 MODAPTS representation of operatorrsquos welding process fragment
Number Motion of left hand Motion of right handDiscomposed
motion descriptionMOD
representationDiscomposed
motion descriptionMOD
representation1 Grasp the pipe M4G1
2 Insert the pipe andadjust its position M4P2 Prepare the
welding gun M3P2
3 Hold the pipe H Start spot welding M1P0 times 119899
Figure 5 Shooting operatorrsquos operation
6 Case Study
In our study a manual welding case is used to illustrate theproposed OEK acquisitionmethodThis case originates froma real manufacturing companyrsquos production improvementproject
61 Identification of OEK Sources SQ company is a producerof new energy devices The main product of company isLNG (Liquefied Natural Gas) cylinders The welding processis widely used in the cylindersrsquo manufacturing The head ofinner vessel due to its complex internal structure cannot bemanufactured by autowelding Therefore manual welding isemployed in this process (Figure 5)
In actual manufacturing the varying quality of theproduct causes much trouble for the company The majorreason for the productrsquos quality variation lies in the differentwelding methods used by the workers Because the trainingof new employees needs a long time there are always novicesand skilled operators in the company Although the companyprovides the standard operation instructions the novicesusually find it hard to grasp the technique know-how Forthe skilled operators they often feel difficult to tell what theirempirical knowledge is and what kind of operation is the bestin guiding the novice Therefore it is an urgent mission toanalyze the operational know-how of the skilled operatorsand elicit their OEK
62 Motion Modeling
Step 1 (motion capture) Fifteen skilled technicians andfifteen novices were invited to take part in the case In this
step motion capture was carried out in the real operationsituation as shown in Figure 5 It is important for the videocamera to take a position that does not disturb the workerrsquosoperation In our study the wearable sensors were not chosensince they often burden theworker and affect human thinking[24]
Step 2 (motion analysis) TheMODAPTS analysis can trans-late the welding operation into basic motion element classcodes and time values through video examination [9] Forexample in an assembly process the operatorrsquos motionsequence includes ldquomove the left hand to the componentrdquoldquoget the componentrdquo ldquomove the componentrdquo and ldquoput thecomponentrdquo which are assigned the codes M3 G1 M3 andP1 respectively Thus the resulting motion MODAPTS isM3G1M3P1
In our study the welding process is represented alphanu-merically as motion element sets by means of IEMS softwareFigure 6 illustrates an example of a MODAPTS for sequen-tial welding operations consisting of grasping insertingadjusting and welding operations Table 2 presents theMOD representation of a fragment of the operatorrsquos weldingprocess
Step 3 (establish scenario model) In this step the result ofMODAPTS analysis is used to construct the scenario modelThe operatorrsquos motion combination andmotion sequence arethemain part of the scenariomodelThe goal and subgoals ofthe operator are the assistant part of scenario model
The scenario factors are considered in the scenariomodelIn our case the ldquoman-machine interactionrdquo includes twoparts the interaction between operator and objective and theinteraction between operator and tools
In the part of man-object interaction the factors consistof the position of the welding arc starting point the numberof rotations welding a pipe and the welding mode
In the part ofman-tool interaction the factors include thewelding gun posture in the difficult process part
The scenario model is shown in Figure 7
Step 4 (establish integrated model) The integrated modelis established by attaching the quality information of eachoperation to the scenario model
In the case the quality of welding process is evaluated bythe standard of the enterpriseThe evaluation criteria includethe weld surface color and the quality of the weld seam Theweld colors include white yellow and blackWhite is the best
Mathematical Problems in Engineering 11
(a) A case of welding process
② M3④ M1④ P2
③ P2
① M4
③ M4② G1
⑤ H
② M3
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0
(b) A MODAPTS analysis of welding process
Figure 6 The MODAPTS analysis of a welding process fragment
and black is the worst In addition the weld surface quality isdivided into three classes good medium and poor
The integrated model is shown in Figure 8
63 OEK Content Eliciting
(1) PreprocessingThe preprocessing is the fundamental of theeliciting algorithm in the next stage
According to the characteristics of motion sequence andthe requirement of VPRS algorithm the following steps areconducted
Step 1 Remove themeaninglessmotionswhich have nothingto do with the operation such as drinking and talking
Step 2 Combine the repetitive motions for example com-bining M2P1M2P1M2P1 into M2P1 times 3 If the repetitive timeofmotion combination ismore than 3 the time is representedas 119899
The structured result of preprocessing is shown in Table 3The explanation of header of Table 3 is as follows ID indicateseach operator Steps indicate the subgoals in the operationalprocess Arcing point the number of rotations and modechoosing are scenario factors Color and surface quality arethe evaluation indices of welding process quality In thecontent of table null indicates no operation in the step
(2) Eliciting Process In this step the initial OEK content iselicited by means of VPRS based on the result of preprocess-ing and is shown in Table 4
64 Intent Analysis In this case the skilled technicians whoparticipated in the experiment were interviewed to explainthe specific intent behind the motion The evaluation factorsnecessity and intent of the motions are listed in Table 5
65 Postprocessing In this stage the related factors of prob-lem scenarios contributors and creditability are integratedinto the OEK content A completed representation of theskilled operatorsrsquo OEK is obtained from the above stagesThestructured representation of OEK is shown in Table 6
7 Discussion
71 Comparison of OEK between Skilled Technicians andNovices The OEK obtained by our method is the specificknow-how coming from the experience of skilled operatorsuch knowledge indicates themotional difference in the criti-cal operational steps between skilled and unskilled operatorsIn this section wewill discuss such difference between skilledoperatorsrsquo OEK and novicesrsquo motions in order to evaluate thevalue of OEK
We analyze the difference from two aspects of timeconsumption and energy consumption performance in thesame operating procedures (Step 3 Step 5 and Step 6)We calculate the operatorsrsquo time from the operation videosIn order to measure the energy consumption of differentoperators CATIA as leading human factors engineeringsoftware is used as the platform to model the human motionand provide the energy consumption Figure 9 is the CATIAsimulation of different operators The results are shown inFigure 10
The difference of time consumption (156 s and 105 s)between skilled and unskilled operators is obvious accordingto Figure 10(a) However to our surprise the energy con-sumption of unskilled operators is more than three times thatof skilled operators (1190 cal and 313 cal see Figure 10(b))The plausible explanation is the importance of OEK whichnot only improves the product quality but also releases theoperatorsrsquo fatigue and then increases the operatorsrsquo safetyFurthermore the result of comparison demonstrates theaccuracy of OEK acquired by our method
72 Comparison of Our Method with Related Works Theevaluation framework of requirements of elicitation tech-nique is used in our study It is regarded as a reasonable andacceptablemethod to evaluate elicitation technique althoughit is a qualitative evaluation method [49] The evaluationframework includes four factors (elicitor informant problemdomain and elicitation process) and each factor includessome detailed attributes In the evaluation framework acompiled technique adequacy table is used to select the mostadequate techniques for a specific application context [50]In this section the evaluation framework is revised and usedto compare our study with related works in the context of
12 Mathematical Problems in Engineering
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
Processed objects
M3
No 1 pipe
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
Num
ber 1
pip
e weld
ing
Weld
ing
prep
arat
ion
Weld
ing
Posit
ion
Weld
ing
mat
eria
ls pr
epar
atio
n
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
P2
M1
G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
Welding
M1
G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
M
an-m
achi
ne in
tera
ctio
n
Hum
an-a
rtifa
cts
inte
ract
ion
ldquoSub
goalrdquo
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
t
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Ges
ture
of h
oldi
ng
tool
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
D3 D3 D3
6 12 12
Combination Combination Succession
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middotmiddot middot middot
Figure 7 The scenario model of the case
Mathematical Problems in Engineering 13
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
ProcessedobjectsM3
Number 1
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
ldquoSub
goalrdquo
Num
ber 1
pip
e weld
ing
ldquoSub
goalrdquo
Weld
ing
prep
arat
ion
ldquoSub
goalrdquo
Weld
ing
ldquoSub
goalrdquo
Posit
ion
ldquoSub
goalrdquo
Weld
ing
mat
eria
lspr
epar
atio
n
Subg
oal 2
Subg
oal 1
Subg
oal 1
P2
M1G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
WeldingM1G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
Man
-mac
hine
inte
ract
ion
Hum
an-a
rtifa
cts
inte
ract
ion
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
tG
estu
re o
fho
ldin
g to
ol
Subg
oal 2
Subg
oal 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
ldquoQua
lity
fact
orsrdquo
The q
ualit
y of
weld
ing
The s
urfa
ce q
ualit
yof
weld
ing
The c
olor
of
weld
ing
D3 D3 D3
6 12 12
Combination Combination Succession
Black Black Black
Non-well-distributed
Well-distributed
Well-distributed
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middot middot middot middot
pipe
Figure 8 The integrated model of the case
14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
In the stage of intent analysis we use the standard inter-view to recognize the real intention of an expertrsquos motionTheexpertrsquos motion matching the right intent will be retained
In the postprocessing stage the problem scenarios con-tributorrsquos information and knowledge credibility are inte-grated with theOEK contentThe structuredOEK is acquiredand the OEK acquisition process is finished
5 Description of OEK Acquisition Method
51 Identification of OEK Sources The aim of eliciting theOEK is to extract and store the skilled operatorrsquos know-how and train the novice operators The complex opera-tional process difficult to grasp becomes the appropriatecandidate of OEK sources The skilled techniciansrsquo OEKin such process will be used to support novice trainingMoreover the workflows needing to be optimized to increasethe productivity are also the potential candidate of OEKsources The expertsrsquo OEK will be valuable to aid workflowsredesign and optimization
52 Motion Analysis and Modeling The aim of this phase isto decompose the operation of operators into basic motionelements and then establish the motion and scenario model
The operation is difficult to be accurately representedand quantitatively analyzed by direct observation [24] Thespecific motion analysis tool is exploited to describe andexplain the workerrsquos operation [9] The result of motionanalysis can be used as the foundation of motion elicitationin the next stage
There are four steps in this phase
(1)Motion CaptureThemotion capture is based on the stereovision technique It is introduced not only to acquire the timeseries posture data of engineers operating some equipment ormachines but also to obtain the time varying relative positionbetween the hand position and operated equipment [5]
In this step firstly stereo vision cameras are set onthe appropriate place and calibrated Secondly the motionscapture software on the PC to record the real operation of theoperator At the same time shooting the operator by the videocamera is started It is important for video camera to take aposition that does not disturb motion capture and cover thewhole body of the expert engineer
(2) Motion Modeling In this step the human motion isbroken down into the basic motion elements based on thevideo shooting the operators In production managementfield the methods of motion analysis include therbligsMTM (methods-time measurement) [32] MOST (Maynardoperation sequence technique) [33] and MODAPTS (Themodular arrangement of predetermined time standards)
The MODAPTS is a method used to analyze the perfor-mance of manual work [31] In this paper the MODAPTSis selected to conduct the motion analysis and modelingdue to its advantages over others First MODAPTS namedldquothe language of workrdquo is a useful tool of motion analysiswhich can analyze the body motions required in a worktask and the time those motions require in standard motion
representation [34] Second MODAPTS is a simple logiceffective and low-cost motion analysis method and can beused with the aid of a desktop computer [35]
The MODAPTS has two distinguishing features elementmotion classes expressed in alphabetic form and timevalues expressed in units called ldquoMODSrdquo The movementclass denoted as ldquoMoverdquo (M) comprises motions done bybody parts such as the finger hand or arm The ldquoterminalrdquoclass comprising motions done at the end of an activityconsists of two kinds of activities Get (G) and Put (P) Theldquoauxiliaryrdquo class comprises motions that are not performedusing body parts such as walking sitting standing decidingand inspecting [36]
(3) Scenarios Modeling In the field of knowledge man-agement and knowledge engineering constructing scenariomodels will facilitate knowledge acquisition and reuse [37]Scenarios model can be used to describe the complexityof engineering problem solving process and is importantfoundation of knowledge sharing and reuse [38] Scenariosusually have characteristic elements such as the presupposedsetting agents or actors goals or objectives and sequences ofactions and events [39]
In our study the scenarios model integrates processinggoals and their subgoals and agents and their actions Inthe scenarios model agents and their actions representingthe operatorsrsquo motion combination or motion sequence arethe essential elements and are used for eliciting skillfuloperatorsrsquo OEK content during the next stage The goal andsubgoals in the model describe the different goalsrsquo level ofprocess
In the manufacturing process the factors of ldquoman-machine interactionrdquo (scenario factors for short) shouldbe considered in the scenarios model The man-machineinteraction explains the relationship between operator andmachine The special way of interaction between operatorsand machines or tools may be the potential technical know-how of skillful operators for example the choice of toolsand the preparation before processing These factors do notbelong to the motion combination or motion sequence andthen are thorny to be described in the motion model Thesefactors are added to the scenario model
The integrated scenarios model is shown in Figure 3 Themodel includes goals and subgoals of operation agents andtheir actions and story line Specifically the goal and subgoalsdescribe the detailed production processThe agents and theiractions represent the technicianrsquos operation which can beused to elicit technicianrsquos OEK The story line presents thesequence of operation such information is often provided inthe operation instructions
(4) Establishing the Integrated Model The information ofproduct quality is added to the scenario model in this stepAnd then the integrated model is established as shown inFigure 4
Up till now the completed information including oper-ational process and result is established in the integratedmodel which can be used as the fundament of motionelicitation in the next stage
Mathematical Problems in Engineering 7
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action MessageactionAgent
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
Spec
ific c
onte
nt o
f go
alSp
ecifi
c con
tent
of
goal
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Subg
oal 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
middot middot middot
Figure 3 The scenario model
53 Motion Elicitation Motion elicitation is the critical stagein the OEK acquisition framework The aim of motion elic-itation is to obtain the expertrsquos critical motion and scenariofactors affecting product qualityThe variable precision roughset (VPRS) is a useful tool of knowledge acquisition and isemployed to elicit OEK in our study [40 41]
As a mathematical methodology rough sets provide apowerful tool for data analysis and knowledge discoveryfrom imprecise and ambiguous data [42] The rough setstheory has been successfully applied in diverse areas suchas knowledge acquisition forecasting modeling and datamining The variable precision rough set (VPRS) model is anextension of the original rough set model The main idea ofVPRS is to allow objects to be classified with an error smallerthan a certain predefined level [43]
531 Some Definitions Related to VPRS VPRS operates onwhat may be described as a knowledge representation systemor information system [22 23 44] An information system isa 4-tuple 119878 = (119880 119860 119881 119891) where
119880 is a nonempty finite set of objects119860 is a nonempty finite set of attributes we have 119860 =
119862 cup 119863 and 119862 cap 119863 = 120593 where 119862 is a nonempty setof condition attributes and 119863 is a nonempty set ofdecision attributes119881 is the union of attribute domains that is 119881 =
cup119886isin119860119881119886 where 119881
119886is a finite attribute domain and the
elements of 119881119886are called value of attribute 119886
119891 119880 times 119860 rarr 119881 is an information function whichassociates a unique value of each attribute with eachobject belonging to 119880 that is forall119886 isin 119860 and forall119909 isin 119880119891(119909 119886) isin 119881
119886
Suppose that information system 119878 = (119880 119860 119881 119891) witheach subset 119885 sube 119880 and an equivalence relation 119877 referredto as an indiscernibility relation corresponds to partition-ing of 119880 into a collection of equivalence classes 119880119877 =
1198641 1198642 119864
119899 which represents that 119880 could be divided
into 119899 subsets of 1198641 1198642 119864
119899according to equivalence
relation 119877 We will assume that all sets under consideration
8 Mathematical Problems in Engineering
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Su
bgoa
l 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
ldquoPro
duct
qua
lityrdquo
Spec
ific f
acto
rs
Parameter A 1
Parameter A 2
Parameter A n
Parameter C 1
Parameter C 2
Parameter C n
Parameter B 1
Parameter B 2
Parameter B n
middot middot middot
ActionAgent
Messageaction
Figure 4 The integrated model
are finite and nonempty The variable precision rough setsapproach to data analysis hinges on two basic conceptsnamely the 120573-lower and the 120573-upper approximations of aset The 120573-lower and the 120573-upper approximations can also bepresented in an equivalent form as shown belowThe 120573-lowerapproximation of the set 119885 sube 119880 and 119875 sube 119862 is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)le120573
119909119894isin 119864 (119875) (4)
The 120573-upper approximation of the set 119885 sube 119880 and 119875 sube 119862is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)lt1minus120573
119909119894isin 119864 (119875) (5)
where 119864(sdot) denotes a set of equivalence classes (in the abovedefinitions they are condition classes based on a subset ofattributes 119875) Consider
119885 sub 119864 (119863)
119875119903(119885 | 119909
119894) =
Card (119885 cap 119909119894)
Card (119883119894)
(6)
Based on Ziarko [43] the measure of quality of classifica-tion for the VPRS model is defined as
120574 (119875119863 120573) =
Card (⋃1minus119875119903(119885|119909119894)
119909119894isin 119864 (119875))
Card (119880) (7)
Mathematical Problems in Engineering 9
where 119885 sube 119864(119863) and 119875 sube 119862 for a specified value of 120573The value 120574(119875119863 120573) measures the proportion of objects inthe universe (119880) for which a classification (based on decisionattributes119863) is possible at the specified value of 120573
532 VPRS Knowledge Extraction Algorithm The LEM2algorithm proposed by Grzymala-Busse [45] is one of themost widely used algorithms and many real-world applica-tions use this algorithm to extract knowledge The VPRSknowledge extraction algorithm (VPRS-KE) originated fromLEM2 and took the inclusion errors into account [46] Inour study VPRS-KE is used to elicit the specific motion andscenario factors in the technicianrsquos operation
In the VPRS-KE a heuristic strategy is used in thealgorithm to extract a minimum set of rules All of positiveregions and boundary region subsets can be denoted by 119884for each 119870 isin 119884 (the decision connecting with region 119870 is119863) Given that 119862 = 119888
1and 1198882and sdot sdot sdot and 119888
119899is the conjunction
of 119899 elementary conditions the objects in the decision tablecovered by 119862 can be expressed as follows
[119862] is the cover of rule 119862 on the decision table[119862]+
119870= [119862] cap 119870 is the positive cover of 119862 on119870
[119862]minus
119870= [119862] cap (119880 minus119870) is the negative cover of 119862 on119870
A decision rule is denoted by 119903The procedure of the rule extraction is summarized in
VPRS knowledge extraction algorithm as follows
Input119870 each of the positive regions or the boundaryregions subset in 119884 (119870 isin 119884) 120573 is the allowedinclusion error for VPRSOutput 119877 set of rules extracted from region119870Step 1 119866 larr 119870 119877 larr Φ
Step 2 While 119866 = Φ
Step 3 BeginStep 4 Initialize the condition set of a rule with anempty set 119862 larr Φ
Step 5 Initialize 119862Current with all the attributes andtheir values in 119866
119862Current larr997888 119888 [119888] cap 119866 = Φ (8)
Step 6 Iteratively add conditions to 119862 until set [119862] isincluded in the set119870with an inclusion error threshold120573
While (119862 = 120593) Or (119890([119862] 119870) le 120573) doBeginSelect 119886 isin 119862Current such that card([119886] cap 119866) ismaximumIf ties occur select 119886with the smallest card([119886])and if further ties occur select the first 119886 fromthe listAdd condition 119886 to 119862
119862 larr997888 119862 cup 119886 (9)
Eliminate the conditions which have beenalready used
119862Current larr997888 119888 [119888] cap 119866 = Φ (10)
Update 119862Current
119862Current larr997888 119862Current minus 119862 (11)
End
Step 7 Delete the redundant conditions
For each 119886 isin 119862 doIf 119890([119862 minus 119886] 119870) le 120573
Then 119862 larr997888 119862 minus 119886 (12)
End For
Step 8 Create a rule 119903 based on 119862 and put the ruleinto 119877
119877 larr997888 119877 cup 119903 (13)
Step 9 Remove the objects covered by 119877 from 119866
119866 larr997888 119866 minus ⋃
119903isin119877
[119903] (14)
Step 10 EndStep 11 Delete the redundant rules
For each 119903 isin 119877 do
If 119870 sube ⋃
119878isin(119877minus119903)
[119904] Then 119877 larr997888 119877 minus 119903 (15)
End For
Step 12 Output 119877
54 Intent Recognition In cognitive psychology intent refersto the thoughts one has before producing an action [47]Intent recognition is to identify the goal of observed sequenceofmotions and is performed by the action agent It is a processby which an agent can gain access to the goals of another andpredict its future actions and trajectories The understandingof human intent based on human motions remains a highlyrelevant and challenging research topic [48]
In our study the standard interview is employed todetect the underlying intent behind humanmotion First theskilled operators are interviewed to evaluate OEK contentand explain the specific intent behind the motion Secondthe advantage of skillful operations and the disadvantage ofunskillful operations will be recognized
55 Postprocessing In the postprocessing the related fac-tors of problem scenarios contributors and creditabilityare integrated into the OEK content and the completedrepresentation of OEK is constructed
10 Mathematical Problems in Engineering
Table 2 MODAPTS representation of operatorrsquos welding process fragment
Number Motion of left hand Motion of right handDiscomposed
motion descriptionMOD
representationDiscomposed
motion descriptionMOD
representation1 Grasp the pipe M4G1
2 Insert the pipe andadjust its position M4P2 Prepare the
welding gun M3P2
3 Hold the pipe H Start spot welding M1P0 times 119899
Figure 5 Shooting operatorrsquos operation
6 Case Study
In our study a manual welding case is used to illustrate theproposed OEK acquisitionmethodThis case originates froma real manufacturing companyrsquos production improvementproject
61 Identification of OEK Sources SQ company is a producerof new energy devices The main product of company isLNG (Liquefied Natural Gas) cylinders The welding processis widely used in the cylindersrsquo manufacturing The head ofinner vessel due to its complex internal structure cannot bemanufactured by autowelding Therefore manual welding isemployed in this process (Figure 5)
In actual manufacturing the varying quality of theproduct causes much trouble for the company The majorreason for the productrsquos quality variation lies in the differentwelding methods used by the workers Because the trainingof new employees needs a long time there are always novicesand skilled operators in the company Although the companyprovides the standard operation instructions the novicesusually find it hard to grasp the technique know-how Forthe skilled operators they often feel difficult to tell what theirempirical knowledge is and what kind of operation is the bestin guiding the novice Therefore it is an urgent mission toanalyze the operational know-how of the skilled operatorsand elicit their OEK
62 Motion Modeling
Step 1 (motion capture) Fifteen skilled technicians andfifteen novices were invited to take part in the case In this
step motion capture was carried out in the real operationsituation as shown in Figure 5 It is important for the videocamera to take a position that does not disturb the workerrsquosoperation In our study the wearable sensors were not chosensince they often burden theworker and affect human thinking[24]
Step 2 (motion analysis) TheMODAPTS analysis can trans-late the welding operation into basic motion element classcodes and time values through video examination [9] Forexample in an assembly process the operatorrsquos motionsequence includes ldquomove the left hand to the componentrdquoldquoget the componentrdquo ldquomove the componentrdquo and ldquoput thecomponentrdquo which are assigned the codes M3 G1 M3 andP1 respectively Thus the resulting motion MODAPTS isM3G1M3P1
In our study the welding process is represented alphanu-merically as motion element sets by means of IEMS softwareFigure 6 illustrates an example of a MODAPTS for sequen-tial welding operations consisting of grasping insertingadjusting and welding operations Table 2 presents theMOD representation of a fragment of the operatorrsquos weldingprocess
Step 3 (establish scenario model) In this step the result ofMODAPTS analysis is used to construct the scenario modelThe operatorrsquos motion combination andmotion sequence arethemain part of the scenariomodelThe goal and subgoals ofthe operator are the assistant part of scenario model
The scenario factors are considered in the scenariomodelIn our case the ldquoman-machine interactionrdquo includes twoparts the interaction between operator and objective and theinteraction between operator and tools
In the part of man-object interaction the factors consistof the position of the welding arc starting point the numberof rotations welding a pipe and the welding mode
In the part ofman-tool interaction the factors include thewelding gun posture in the difficult process part
The scenario model is shown in Figure 7
Step 4 (establish integrated model) The integrated modelis established by attaching the quality information of eachoperation to the scenario model
In the case the quality of welding process is evaluated bythe standard of the enterpriseThe evaluation criteria includethe weld surface color and the quality of the weld seam Theweld colors include white yellow and blackWhite is the best
Mathematical Problems in Engineering 11
(a) A case of welding process
② M3④ M1④ P2
③ P2
① M4
③ M4② G1
⑤ H
② M3
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0
(b) A MODAPTS analysis of welding process
Figure 6 The MODAPTS analysis of a welding process fragment
and black is the worst In addition the weld surface quality isdivided into three classes good medium and poor
The integrated model is shown in Figure 8
63 OEK Content Eliciting
(1) PreprocessingThe preprocessing is the fundamental of theeliciting algorithm in the next stage
According to the characteristics of motion sequence andthe requirement of VPRS algorithm the following steps areconducted
Step 1 Remove themeaninglessmotionswhich have nothingto do with the operation such as drinking and talking
Step 2 Combine the repetitive motions for example com-bining M2P1M2P1M2P1 into M2P1 times 3 If the repetitive timeofmotion combination ismore than 3 the time is representedas 119899
The structured result of preprocessing is shown in Table 3The explanation of header of Table 3 is as follows ID indicateseach operator Steps indicate the subgoals in the operationalprocess Arcing point the number of rotations and modechoosing are scenario factors Color and surface quality arethe evaluation indices of welding process quality In thecontent of table null indicates no operation in the step
(2) Eliciting Process In this step the initial OEK content iselicited by means of VPRS based on the result of preprocess-ing and is shown in Table 4
64 Intent Analysis In this case the skilled technicians whoparticipated in the experiment were interviewed to explainthe specific intent behind the motion The evaluation factorsnecessity and intent of the motions are listed in Table 5
65 Postprocessing In this stage the related factors of prob-lem scenarios contributors and creditability are integratedinto the OEK content A completed representation of theskilled operatorsrsquo OEK is obtained from the above stagesThestructured representation of OEK is shown in Table 6
7 Discussion
71 Comparison of OEK between Skilled Technicians andNovices The OEK obtained by our method is the specificknow-how coming from the experience of skilled operatorsuch knowledge indicates themotional difference in the criti-cal operational steps between skilled and unskilled operatorsIn this section wewill discuss such difference between skilledoperatorsrsquo OEK and novicesrsquo motions in order to evaluate thevalue of OEK
We analyze the difference from two aspects of timeconsumption and energy consumption performance in thesame operating procedures (Step 3 Step 5 and Step 6)We calculate the operatorsrsquo time from the operation videosIn order to measure the energy consumption of differentoperators CATIA as leading human factors engineeringsoftware is used as the platform to model the human motionand provide the energy consumption Figure 9 is the CATIAsimulation of different operators The results are shown inFigure 10
The difference of time consumption (156 s and 105 s)between skilled and unskilled operators is obvious accordingto Figure 10(a) However to our surprise the energy con-sumption of unskilled operators is more than three times thatof skilled operators (1190 cal and 313 cal see Figure 10(b))The plausible explanation is the importance of OEK whichnot only improves the product quality but also releases theoperatorsrsquo fatigue and then increases the operatorsrsquo safetyFurthermore the result of comparison demonstrates theaccuracy of OEK acquired by our method
72 Comparison of Our Method with Related Works Theevaluation framework of requirements of elicitation tech-nique is used in our study It is regarded as a reasonable andacceptablemethod to evaluate elicitation technique althoughit is a qualitative evaluation method [49] The evaluationframework includes four factors (elicitor informant problemdomain and elicitation process) and each factor includessome detailed attributes In the evaluation framework acompiled technique adequacy table is used to select the mostadequate techniques for a specific application context [50]In this section the evaluation framework is revised and usedto compare our study with related works in the context of
12 Mathematical Problems in Engineering
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
Processed objects
M3
No 1 pipe
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
Num
ber 1
pip
e weld
ing
Weld
ing
prep
arat
ion
Weld
ing
Posit
ion
Weld
ing
mat
eria
ls pr
epar
atio
n
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
P2
M1
G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
Welding
M1
G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
M
an-m
achi
ne in
tera
ctio
n
Hum
an-a
rtifa
cts
inte
ract
ion
ldquoSub
goalrdquo
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
t
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Ges
ture
of h
oldi
ng
tool
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
D3 D3 D3
6 12 12
Combination Combination Succession
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middotmiddot middot middot
Figure 7 The scenario model of the case
Mathematical Problems in Engineering 13
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
ProcessedobjectsM3
Number 1
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
ldquoSub
goalrdquo
Num
ber 1
pip
e weld
ing
ldquoSub
goalrdquo
Weld
ing
prep
arat
ion
ldquoSub
goalrdquo
Weld
ing
ldquoSub
goalrdquo
Posit
ion
ldquoSub
goalrdquo
Weld
ing
mat
eria
lspr
epar
atio
n
Subg
oal 2
Subg
oal 1
Subg
oal 1
P2
M1G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
WeldingM1G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
Man
-mac
hine
inte
ract
ion
Hum
an-a
rtifa
cts
inte
ract
ion
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
tG
estu
re o
fho
ldin
g to
ol
Subg
oal 2
Subg
oal 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
ldquoQua
lity
fact
orsrdquo
The q
ualit
y of
weld
ing
The s
urfa
ce q
ualit
yof
weld
ing
The c
olor
of
weld
ing
D3 D3 D3
6 12 12
Combination Combination Succession
Black Black Black
Non-well-distributed
Well-distributed
Well-distributed
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middot middot middot middot
pipe
Figure 8 The integrated model of the case
14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action MessageactionAgent
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
Spec
ific c
onte
nt o
f go
alSp
ecifi
c con
tent
of
goal
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Subg
oal 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
middot middot middot
Figure 3 The scenario model
53 Motion Elicitation Motion elicitation is the critical stagein the OEK acquisition framework The aim of motion elic-itation is to obtain the expertrsquos critical motion and scenariofactors affecting product qualityThe variable precision roughset (VPRS) is a useful tool of knowledge acquisition and isemployed to elicit OEK in our study [40 41]
As a mathematical methodology rough sets provide apowerful tool for data analysis and knowledge discoveryfrom imprecise and ambiguous data [42] The rough setstheory has been successfully applied in diverse areas suchas knowledge acquisition forecasting modeling and datamining The variable precision rough set (VPRS) model is anextension of the original rough set model The main idea ofVPRS is to allow objects to be classified with an error smallerthan a certain predefined level [43]
531 Some Definitions Related to VPRS VPRS operates onwhat may be described as a knowledge representation systemor information system [22 23 44] An information system isa 4-tuple 119878 = (119880 119860 119881 119891) where
119880 is a nonempty finite set of objects119860 is a nonempty finite set of attributes we have 119860 =
119862 cup 119863 and 119862 cap 119863 = 120593 where 119862 is a nonempty setof condition attributes and 119863 is a nonempty set ofdecision attributes119881 is the union of attribute domains that is 119881 =
cup119886isin119860119881119886 where 119881
119886is a finite attribute domain and the
elements of 119881119886are called value of attribute 119886
119891 119880 times 119860 rarr 119881 is an information function whichassociates a unique value of each attribute with eachobject belonging to 119880 that is forall119886 isin 119860 and forall119909 isin 119880119891(119909 119886) isin 119881
119886
Suppose that information system 119878 = (119880 119860 119881 119891) witheach subset 119885 sube 119880 and an equivalence relation 119877 referredto as an indiscernibility relation corresponds to partition-ing of 119880 into a collection of equivalence classes 119880119877 =
1198641 1198642 119864
119899 which represents that 119880 could be divided
into 119899 subsets of 1198641 1198642 119864
119899according to equivalence
relation 119877 We will assume that all sets under consideration
8 Mathematical Problems in Engineering
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Su
bgoa
l 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
ldquoPro
duct
qua
lityrdquo
Spec
ific f
acto
rs
Parameter A 1
Parameter A 2
Parameter A n
Parameter C 1
Parameter C 2
Parameter C n
Parameter B 1
Parameter B 2
Parameter B n
middot middot middot
ActionAgent
Messageaction
Figure 4 The integrated model
are finite and nonempty The variable precision rough setsapproach to data analysis hinges on two basic conceptsnamely the 120573-lower and the 120573-upper approximations of aset The 120573-lower and the 120573-upper approximations can also bepresented in an equivalent form as shown belowThe 120573-lowerapproximation of the set 119885 sube 119880 and 119875 sube 119862 is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)le120573
119909119894isin 119864 (119875) (4)
The 120573-upper approximation of the set 119885 sube 119880 and 119875 sube 119862is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)lt1minus120573
119909119894isin 119864 (119875) (5)
where 119864(sdot) denotes a set of equivalence classes (in the abovedefinitions they are condition classes based on a subset ofattributes 119875) Consider
119885 sub 119864 (119863)
119875119903(119885 | 119909
119894) =
Card (119885 cap 119909119894)
Card (119883119894)
(6)
Based on Ziarko [43] the measure of quality of classifica-tion for the VPRS model is defined as
120574 (119875119863 120573) =
Card (⋃1minus119875119903(119885|119909119894)
119909119894isin 119864 (119875))
Card (119880) (7)
Mathematical Problems in Engineering 9
where 119885 sube 119864(119863) and 119875 sube 119862 for a specified value of 120573The value 120574(119875119863 120573) measures the proportion of objects inthe universe (119880) for which a classification (based on decisionattributes119863) is possible at the specified value of 120573
532 VPRS Knowledge Extraction Algorithm The LEM2algorithm proposed by Grzymala-Busse [45] is one of themost widely used algorithms and many real-world applica-tions use this algorithm to extract knowledge The VPRSknowledge extraction algorithm (VPRS-KE) originated fromLEM2 and took the inclusion errors into account [46] Inour study VPRS-KE is used to elicit the specific motion andscenario factors in the technicianrsquos operation
In the VPRS-KE a heuristic strategy is used in thealgorithm to extract a minimum set of rules All of positiveregions and boundary region subsets can be denoted by 119884for each 119870 isin 119884 (the decision connecting with region 119870 is119863) Given that 119862 = 119888
1and 1198882and sdot sdot sdot and 119888
119899is the conjunction
of 119899 elementary conditions the objects in the decision tablecovered by 119862 can be expressed as follows
[119862] is the cover of rule 119862 on the decision table[119862]+
119870= [119862] cap 119870 is the positive cover of 119862 on119870
[119862]minus
119870= [119862] cap (119880 minus119870) is the negative cover of 119862 on119870
A decision rule is denoted by 119903The procedure of the rule extraction is summarized in
VPRS knowledge extraction algorithm as follows
Input119870 each of the positive regions or the boundaryregions subset in 119884 (119870 isin 119884) 120573 is the allowedinclusion error for VPRSOutput 119877 set of rules extracted from region119870Step 1 119866 larr 119870 119877 larr Φ
Step 2 While 119866 = Φ
Step 3 BeginStep 4 Initialize the condition set of a rule with anempty set 119862 larr Φ
Step 5 Initialize 119862Current with all the attributes andtheir values in 119866
119862Current larr997888 119888 [119888] cap 119866 = Φ (8)
Step 6 Iteratively add conditions to 119862 until set [119862] isincluded in the set119870with an inclusion error threshold120573
While (119862 = 120593) Or (119890([119862] 119870) le 120573) doBeginSelect 119886 isin 119862Current such that card([119886] cap 119866) ismaximumIf ties occur select 119886with the smallest card([119886])and if further ties occur select the first 119886 fromthe listAdd condition 119886 to 119862
119862 larr997888 119862 cup 119886 (9)
Eliminate the conditions which have beenalready used
119862Current larr997888 119888 [119888] cap 119866 = Φ (10)
Update 119862Current
119862Current larr997888 119862Current minus 119862 (11)
End
Step 7 Delete the redundant conditions
For each 119886 isin 119862 doIf 119890([119862 minus 119886] 119870) le 120573
Then 119862 larr997888 119862 minus 119886 (12)
End For
Step 8 Create a rule 119903 based on 119862 and put the ruleinto 119877
119877 larr997888 119877 cup 119903 (13)
Step 9 Remove the objects covered by 119877 from 119866
119866 larr997888 119866 minus ⋃
119903isin119877
[119903] (14)
Step 10 EndStep 11 Delete the redundant rules
For each 119903 isin 119877 do
If 119870 sube ⋃
119878isin(119877minus119903)
[119904] Then 119877 larr997888 119877 minus 119903 (15)
End For
Step 12 Output 119877
54 Intent Recognition In cognitive psychology intent refersto the thoughts one has before producing an action [47]Intent recognition is to identify the goal of observed sequenceofmotions and is performed by the action agent It is a processby which an agent can gain access to the goals of another andpredict its future actions and trajectories The understandingof human intent based on human motions remains a highlyrelevant and challenging research topic [48]
In our study the standard interview is employed todetect the underlying intent behind humanmotion First theskilled operators are interviewed to evaluate OEK contentand explain the specific intent behind the motion Secondthe advantage of skillful operations and the disadvantage ofunskillful operations will be recognized
55 Postprocessing In the postprocessing the related fac-tors of problem scenarios contributors and creditabilityare integrated into the OEK content and the completedrepresentation of OEK is constructed
10 Mathematical Problems in Engineering
Table 2 MODAPTS representation of operatorrsquos welding process fragment
Number Motion of left hand Motion of right handDiscomposed
motion descriptionMOD
representationDiscomposed
motion descriptionMOD
representation1 Grasp the pipe M4G1
2 Insert the pipe andadjust its position M4P2 Prepare the
welding gun M3P2
3 Hold the pipe H Start spot welding M1P0 times 119899
Figure 5 Shooting operatorrsquos operation
6 Case Study
In our study a manual welding case is used to illustrate theproposed OEK acquisitionmethodThis case originates froma real manufacturing companyrsquos production improvementproject
61 Identification of OEK Sources SQ company is a producerof new energy devices The main product of company isLNG (Liquefied Natural Gas) cylinders The welding processis widely used in the cylindersrsquo manufacturing The head ofinner vessel due to its complex internal structure cannot bemanufactured by autowelding Therefore manual welding isemployed in this process (Figure 5)
In actual manufacturing the varying quality of theproduct causes much trouble for the company The majorreason for the productrsquos quality variation lies in the differentwelding methods used by the workers Because the trainingof new employees needs a long time there are always novicesand skilled operators in the company Although the companyprovides the standard operation instructions the novicesusually find it hard to grasp the technique know-how Forthe skilled operators they often feel difficult to tell what theirempirical knowledge is and what kind of operation is the bestin guiding the novice Therefore it is an urgent mission toanalyze the operational know-how of the skilled operatorsand elicit their OEK
62 Motion Modeling
Step 1 (motion capture) Fifteen skilled technicians andfifteen novices were invited to take part in the case In this
step motion capture was carried out in the real operationsituation as shown in Figure 5 It is important for the videocamera to take a position that does not disturb the workerrsquosoperation In our study the wearable sensors were not chosensince they often burden theworker and affect human thinking[24]
Step 2 (motion analysis) TheMODAPTS analysis can trans-late the welding operation into basic motion element classcodes and time values through video examination [9] Forexample in an assembly process the operatorrsquos motionsequence includes ldquomove the left hand to the componentrdquoldquoget the componentrdquo ldquomove the componentrdquo and ldquoput thecomponentrdquo which are assigned the codes M3 G1 M3 andP1 respectively Thus the resulting motion MODAPTS isM3G1M3P1
In our study the welding process is represented alphanu-merically as motion element sets by means of IEMS softwareFigure 6 illustrates an example of a MODAPTS for sequen-tial welding operations consisting of grasping insertingadjusting and welding operations Table 2 presents theMOD representation of a fragment of the operatorrsquos weldingprocess
Step 3 (establish scenario model) In this step the result ofMODAPTS analysis is used to construct the scenario modelThe operatorrsquos motion combination andmotion sequence arethemain part of the scenariomodelThe goal and subgoals ofthe operator are the assistant part of scenario model
The scenario factors are considered in the scenariomodelIn our case the ldquoman-machine interactionrdquo includes twoparts the interaction between operator and objective and theinteraction between operator and tools
In the part of man-object interaction the factors consistof the position of the welding arc starting point the numberof rotations welding a pipe and the welding mode
In the part ofman-tool interaction the factors include thewelding gun posture in the difficult process part
The scenario model is shown in Figure 7
Step 4 (establish integrated model) The integrated modelis established by attaching the quality information of eachoperation to the scenario model
In the case the quality of welding process is evaluated bythe standard of the enterpriseThe evaluation criteria includethe weld surface color and the quality of the weld seam Theweld colors include white yellow and blackWhite is the best
Mathematical Problems in Engineering 11
(a) A case of welding process
② M3④ M1④ P2
③ P2
① M4
③ M4② G1
⑤ H
② M3
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0
(b) A MODAPTS analysis of welding process
Figure 6 The MODAPTS analysis of a welding process fragment
and black is the worst In addition the weld surface quality isdivided into three classes good medium and poor
The integrated model is shown in Figure 8
63 OEK Content Eliciting
(1) PreprocessingThe preprocessing is the fundamental of theeliciting algorithm in the next stage
According to the characteristics of motion sequence andthe requirement of VPRS algorithm the following steps areconducted
Step 1 Remove themeaninglessmotionswhich have nothingto do with the operation such as drinking and talking
Step 2 Combine the repetitive motions for example com-bining M2P1M2P1M2P1 into M2P1 times 3 If the repetitive timeofmotion combination ismore than 3 the time is representedas 119899
The structured result of preprocessing is shown in Table 3The explanation of header of Table 3 is as follows ID indicateseach operator Steps indicate the subgoals in the operationalprocess Arcing point the number of rotations and modechoosing are scenario factors Color and surface quality arethe evaluation indices of welding process quality In thecontent of table null indicates no operation in the step
(2) Eliciting Process In this step the initial OEK content iselicited by means of VPRS based on the result of preprocess-ing and is shown in Table 4
64 Intent Analysis In this case the skilled technicians whoparticipated in the experiment were interviewed to explainthe specific intent behind the motion The evaluation factorsnecessity and intent of the motions are listed in Table 5
65 Postprocessing In this stage the related factors of prob-lem scenarios contributors and creditability are integratedinto the OEK content A completed representation of theskilled operatorsrsquo OEK is obtained from the above stagesThestructured representation of OEK is shown in Table 6
7 Discussion
71 Comparison of OEK between Skilled Technicians andNovices The OEK obtained by our method is the specificknow-how coming from the experience of skilled operatorsuch knowledge indicates themotional difference in the criti-cal operational steps between skilled and unskilled operatorsIn this section wewill discuss such difference between skilledoperatorsrsquo OEK and novicesrsquo motions in order to evaluate thevalue of OEK
We analyze the difference from two aspects of timeconsumption and energy consumption performance in thesame operating procedures (Step 3 Step 5 and Step 6)We calculate the operatorsrsquo time from the operation videosIn order to measure the energy consumption of differentoperators CATIA as leading human factors engineeringsoftware is used as the platform to model the human motionand provide the energy consumption Figure 9 is the CATIAsimulation of different operators The results are shown inFigure 10
The difference of time consumption (156 s and 105 s)between skilled and unskilled operators is obvious accordingto Figure 10(a) However to our surprise the energy con-sumption of unskilled operators is more than three times thatof skilled operators (1190 cal and 313 cal see Figure 10(b))The plausible explanation is the importance of OEK whichnot only improves the product quality but also releases theoperatorsrsquo fatigue and then increases the operatorsrsquo safetyFurthermore the result of comparison demonstrates theaccuracy of OEK acquired by our method
72 Comparison of Our Method with Related Works Theevaluation framework of requirements of elicitation tech-nique is used in our study It is regarded as a reasonable andacceptablemethod to evaluate elicitation technique althoughit is a qualitative evaluation method [49] The evaluationframework includes four factors (elicitor informant problemdomain and elicitation process) and each factor includessome detailed attributes In the evaluation framework acompiled technique adequacy table is used to select the mostadequate techniques for a specific application context [50]In this section the evaluation framework is revised and usedto compare our study with related works in the context of
12 Mathematical Problems in Engineering
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
Processed objects
M3
No 1 pipe
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
Num
ber 1
pip
e weld
ing
Weld
ing
prep
arat
ion
Weld
ing
Posit
ion
Weld
ing
mat
eria
ls pr
epar
atio
n
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
P2
M1
G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
Welding
M1
G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
M
an-m
achi
ne in
tera
ctio
n
Hum
an-a
rtifa
cts
inte
ract
ion
ldquoSub
goalrdquo
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
t
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Ges
ture
of h
oldi
ng
tool
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
D3 D3 D3
6 12 12
Combination Combination Succession
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middotmiddot middot middot
Figure 7 The scenario model of the case
Mathematical Problems in Engineering 13
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
ProcessedobjectsM3
Number 1
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
ldquoSub
goalrdquo
Num
ber 1
pip
e weld
ing
ldquoSub
goalrdquo
Weld
ing
prep
arat
ion
ldquoSub
goalrdquo
Weld
ing
ldquoSub
goalrdquo
Posit
ion
ldquoSub
goalrdquo
Weld
ing
mat
eria
lspr
epar
atio
n
Subg
oal 2
Subg
oal 1
Subg
oal 1
P2
M1G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
WeldingM1G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
Man
-mac
hine
inte
ract
ion
Hum
an-a
rtifa
cts
inte
ract
ion
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
tG
estu
re o
fho
ldin
g to
ol
Subg
oal 2
Subg
oal 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
ldquoQua
lity
fact
orsrdquo
The q
ualit
y of
weld
ing
The s
urfa
ce q
ualit
yof
weld
ing
The c
olor
of
weld
ing
D3 D3 D3
6 12 12
Combination Combination Succession
Black Black Black
Non-well-distributed
Well-distributed
Well-distributed
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middot middot middot middot
pipe
Figure 8 The integrated model of the case
14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Action A 1
Action 3
Action n
Action 2
Start
End
Agent A
Action 1
Agent B SystemStory line Agent N
Action A 2
Processed objects
Action B 1
Action A 3
Object 1
Object nAction B 3
ldquoGoa
lrdquoSp
ecifi
c con
tent
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt
of g
oal
ldquoSub
goalrdquo
Spec
ific c
onte
nt o
f go
al
Subg
oal 1
Su
bgoa
l 2
Subg
oal n
Object 2
Action A 3
Action A 3
Action A 3
Action B 1
Action A 3
Action B 3
Action B 3
Action B 3
Action B 3
Action N 1
Action N 3
Action N 1
Action N 3
Action N 3
Action N 3
Action N 3
Factor A 1 Factor B 1 Factor C 1
ldquoSce
nario
fact
orsrdquo
Spec
ific f
acto
rs
Factor A 2 Factor B 2 Factor C 2
ldquoPro
duct
qua
lityrdquo
Spec
ific f
acto
rs
Parameter A 1
Parameter A 2
Parameter A n
Parameter C 1
Parameter C 2
Parameter C n
Parameter B 1
Parameter B 2
Parameter B n
middot middot middot
ActionAgent
Messageaction
Figure 4 The integrated model
are finite and nonempty The variable precision rough setsapproach to data analysis hinges on two basic conceptsnamely the 120573-lower and the 120573-upper approximations of aset The 120573-lower and the 120573-upper approximations can also bepresented in an equivalent form as shown belowThe 120573-lowerapproximation of the set 119885 sube 119880 and 119875 sube 119862 is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)le120573
119909119894isin 119864 (119875) (4)
The 120573-upper approximation of the set 119885 sube 119880 and 119875 sube 119862is
119862120573(119863) = ⋃
1minus119875119903(119885|119909119894)lt1minus120573
119909119894isin 119864 (119875) (5)
where 119864(sdot) denotes a set of equivalence classes (in the abovedefinitions they are condition classes based on a subset ofattributes 119875) Consider
119885 sub 119864 (119863)
119875119903(119885 | 119909
119894) =
Card (119885 cap 119909119894)
Card (119883119894)
(6)
Based on Ziarko [43] the measure of quality of classifica-tion for the VPRS model is defined as
120574 (119875119863 120573) =
Card (⋃1minus119875119903(119885|119909119894)
119909119894isin 119864 (119875))
Card (119880) (7)
Mathematical Problems in Engineering 9
where 119885 sube 119864(119863) and 119875 sube 119862 for a specified value of 120573The value 120574(119875119863 120573) measures the proportion of objects inthe universe (119880) for which a classification (based on decisionattributes119863) is possible at the specified value of 120573
532 VPRS Knowledge Extraction Algorithm The LEM2algorithm proposed by Grzymala-Busse [45] is one of themost widely used algorithms and many real-world applica-tions use this algorithm to extract knowledge The VPRSknowledge extraction algorithm (VPRS-KE) originated fromLEM2 and took the inclusion errors into account [46] Inour study VPRS-KE is used to elicit the specific motion andscenario factors in the technicianrsquos operation
In the VPRS-KE a heuristic strategy is used in thealgorithm to extract a minimum set of rules All of positiveregions and boundary region subsets can be denoted by 119884for each 119870 isin 119884 (the decision connecting with region 119870 is119863) Given that 119862 = 119888
1and 1198882and sdot sdot sdot and 119888
119899is the conjunction
of 119899 elementary conditions the objects in the decision tablecovered by 119862 can be expressed as follows
[119862] is the cover of rule 119862 on the decision table[119862]+
119870= [119862] cap 119870 is the positive cover of 119862 on119870
[119862]minus
119870= [119862] cap (119880 minus119870) is the negative cover of 119862 on119870
A decision rule is denoted by 119903The procedure of the rule extraction is summarized in
VPRS knowledge extraction algorithm as follows
Input119870 each of the positive regions or the boundaryregions subset in 119884 (119870 isin 119884) 120573 is the allowedinclusion error for VPRSOutput 119877 set of rules extracted from region119870Step 1 119866 larr 119870 119877 larr Φ
Step 2 While 119866 = Φ
Step 3 BeginStep 4 Initialize the condition set of a rule with anempty set 119862 larr Φ
Step 5 Initialize 119862Current with all the attributes andtheir values in 119866
119862Current larr997888 119888 [119888] cap 119866 = Φ (8)
Step 6 Iteratively add conditions to 119862 until set [119862] isincluded in the set119870with an inclusion error threshold120573
While (119862 = 120593) Or (119890([119862] 119870) le 120573) doBeginSelect 119886 isin 119862Current such that card([119886] cap 119866) ismaximumIf ties occur select 119886with the smallest card([119886])and if further ties occur select the first 119886 fromthe listAdd condition 119886 to 119862
119862 larr997888 119862 cup 119886 (9)
Eliminate the conditions which have beenalready used
119862Current larr997888 119888 [119888] cap 119866 = Φ (10)
Update 119862Current
119862Current larr997888 119862Current minus 119862 (11)
End
Step 7 Delete the redundant conditions
For each 119886 isin 119862 doIf 119890([119862 minus 119886] 119870) le 120573
Then 119862 larr997888 119862 minus 119886 (12)
End For
Step 8 Create a rule 119903 based on 119862 and put the ruleinto 119877
119877 larr997888 119877 cup 119903 (13)
Step 9 Remove the objects covered by 119877 from 119866
119866 larr997888 119866 minus ⋃
119903isin119877
[119903] (14)
Step 10 EndStep 11 Delete the redundant rules
For each 119903 isin 119877 do
If 119870 sube ⋃
119878isin(119877minus119903)
[119904] Then 119877 larr997888 119877 minus 119903 (15)
End For
Step 12 Output 119877
54 Intent Recognition In cognitive psychology intent refersto the thoughts one has before producing an action [47]Intent recognition is to identify the goal of observed sequenceofmotions and is performed by the action agent It is a processby which an agent can gain access to the goals of another andpredict its future actions and trajectories The understandingof human intent based on human motions remains a highlyrelevant and challenging research topic [48]
In our study the standard interview is employed todetect the underlying intent behind humanmotion First theskilled operators are interviewed to evaluate OEK contentand explain the specific intent behind the motion Secondthe advantage of skillful operations and the disadvantage ofunskillful operations will be recognized
55 Postprocessing In the postprocessing the related fac-tors of problem scenarios contributors and creditabilityare integrated into the OEK content and the completedrepresentation of OEK is constructed
10 Mathematical Problems in Engineering
Table 2 MODAPTS representation of operatorrsquos welding process fragment
Number Motion of left hand Motion of right handDiscomposed
motion descriptionMOD
representationDiscomposed
motion descriptionMOD
representation1 Grasp the pipe M4G1
2 Insert the pipe andadjust its position M4P2 Prepare the
welding gun M3P2
3 Hold the pipe H Start spot welding M1P0 times 119899
Figure 5 Shooting operatorrsquos operation
6 Case Study
In our study a manual welding case is used to illustrate theproposed OEK acquisitionmethodThis case originates froma real manufacturing companyrsquos production improvementproject
61 Identification of OEK Sources SQ company is a producerof new energy devices The main product of company isLNG (Liquefied Natural Gas) cylinders The welding processis widely used in the cylindersrsquo manufacturing The head ofinner vessel due to its complex internal structure cannot bemanufactured by autowelding Therefore manual welding isemployed in this process (Figure 5)
In actual manufacturing the varying quality of theproduct causes much trouble for the company The majorreason for the productrsquos quality variation lies in the differentwelding methods used by the workers Because the trainingof new employees needs a long time there are always novicesand skilled operators in the company Although the companyprovides the standard operation instructions the novicesusually find it hard to grasp the technique know-how Forthe skilled operators they often feel difficult to tell what theirempirical knowledge is and what kind of operation is the bestin guiding the novice Therefore it is an urgent mission toanalyze the operational know-how of the skilled operatorsand elicit their OEK
62 Motion Modeling
Step 1 (motion capture) Fifteen skilled technicians andfifteen novices were invited to take part in the case In this
step motion capture was carried out in the real operationsituation as shown in Figure 5 It is important for the videocamera to take a position that does not disturb the workerrsquosoperation In our study the wearable sensors were not chosensince they often burden theworker and affect human thinking[24]
Step 2 (motion analysis) TheMODAPTS analysis can trans-late the welding operation into basic motion element classcodes and time values through video examination [9] Forexample in an assembly process the operatorrsquos motionsequence includes ldquomove the left hand to the componentrdquoldquoget the componentrdquo ldquomove the componentrdquo and ldquoput thecomponentrdquo which are assigned the codes M3 G1 M3 andP1 respectively Thus the resulting motion MODAPTS isM3G1M3P1
In our study the welding process is represented alphanu-merically as motion element sets by means of IEMS softwareFigure 6 illustrates an example of a MODAPTS for sequen-tial welding operations consisting of grasping insertingadjusting and welding operations Table 2 presents theMOD representation of a fragment of the operatorrsquos weldingprocess
Step 3 (establish scenario model) In this step the result ofMODAPTS analysis is used to construct the scenario modelThe operatorrsquos motion combination andmotion sequence arethemain part of the scenariomodelThe goal and subgoals ofthe operator are the assistant part of scenario model
The scenario factors are considered in the scenariomodelIn our case the ldquoman-machine interactionrdquo includes twoparts the interaction between operator and objective and theinteraction between operator and tools
In the part of man-object interaction the factors consistof the position of the welding arc starting point the numberof rotations welding a pipe and the welding mode
In the part ofman-tool interaction the factors include thewelding gun posture in the difficult process part
The scenario model is shown in Figure 7
Step 4 (establish integrated model) The integrated modelis established by attaching the quality information of eachoperation to the scenario model
In the case the quality of welding process is evaluated bythe standard of the enterpriseThe evaluation criteria includethe weld surface color and the quality of the weld seam Theweld colors include white yellow and blackWhite is the best
Mathematical Problems in Engineering 11
(a) A case of welding process
② M3④ M1④ P2
③ P2
① M4
③ M4② G1
⑤ H
② M3
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0
(b) A MODAPTS analysis of welding process
Figure 6 The MODAPTS analysis of a welding process fragment
and black is the worst In addition the weld surface quality isdivided into three classes good medium and poor
The integrated model is shown in Figure 8
63 OEK Content Eliciting
(1) PreprocessingThe preprocessing is the fundamental of theeliciting algorithm in the next stage
According to the characteristics of motion sequence andthe requirement of VPRS algorithm the following steps areconducted
Step 1 Remove themeaninglessmotionswhich have nothingto do with the operation such as drinking and talking
Step 2 Combine the repetitive motions for example com-bining M2P1M2P1M2P1 into M2P1 times 3 If the repetitive timeofmotion combination ismore than 3 the time is representedas 119899
The structured result of preprocessing is shown in Table 3The explanation of header of Table 3 is as follows ID indicateseach operator Steps indicate the subgoals in the operationalprocess Arcing point the number of rotations and modechoosing are scenario factors Color and surface quality arethe evaluation indices of welding process quality In thecontent of table null indicates no operation in the step
(2) Eliciting Process In this step the initial OEK content iselicited by means of VPRS based on the result of preprocess-ing and is shown in Table 4
64 Intent Analysis In this case the skilled technicians whoparticipated in the experiment were interviewed to explainthe specific intent behind the motion The evaluation factorsnecessity and intent of the motions are listed in Table 5
65 Postprocessing In this stage the related factors of prob-lem scenarios contributors and creditability are integratedinto the OEK content A completed representation of theskilled operatorsrsquo OEK is obtained from the above stagesThestructured representation of OEK is shown in Table 6
7 Discussion
71 Comparison of OEK between Skilled Technicians andNovices The OEK obtained by our method is the specificknow-how coming from the experience of skilled operatorsuch knowledge indicates themotional difference in the criti-cal operational steps between skilled and unskilled operatorsIn this section wewill discuss such difference between skilledoperatorsrsquo OEK and novicesrsquo motions in order to evaluate thevalue of OEK
We analyze the difference from two aspects of timeconsumption and energy consumption performance in thesame operating procedures (Step 3 Step 5 and Step 6)We calculate the operatorsrsquo time from the operation videosIn order to measure the energy consumption of differentoperators CATIA as leading human factors engineeringsoftware is used as the platform to model the human motionand provide the energy consumption Figure 9 is the CATIAsimulation of different operators The results are shown inFigure 10
The difference of time consumption (156 s and 105 s)between skilled and unskilled operators is obvious accordingto Figure 10(a) However to our surprise the energy con-sumption of unskilled operators is more than three times thatof skilled operators (1190 cal and 313 cal see Figure 10(b))The plausible explanation is the importance of OEK whichnot only improves the product quality but also releases theoperatorsrsquo fatigue and then increases the operatorsrsquo safetyFurthermore the result of comparison demonstrates theaccuracy of OEK acquired by our method
72 Comparison of Our Method with Related Works Theevaluation framework of requirements of elicitation tech-nique is used in our study It is regarded as a reasonable andacceptablemethod to evaluate elicitation technique althoughit is a qualitative evaluation method [49] The evaluationframework includes four factors (elicitor informant problemdomain and elicitation process) and each factor includessome detailed attributes In the evaluation framework acompiled technique adequacy table is used to select the mostadequate techniques for a specific application context [50]In this section the evaluation framework is revised and usedto compare our study with related works in the context of
12 Mathematical Problems in Engineering
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
Processed objects
M3
No 1 pipe
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
Num
ber 1
pip
e weld
ing
Weld
ing
prep
arat
ion
Weld
ing
Posit
ion
Weld
ing
mat
eria
ls pr
epar
atio
n
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
P2
M1
G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
Welding
M1
G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
M
an-m
achi
ne in
tera
ctio
n
Hum
an-a
rtifa
cts
inte
ract
ion
ldquoSub
goalrdquo
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
t
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Ges
ture
of h
oldi
ng
tool
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
D3 D3 D3
6 12 12
Combination Combination Succession
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middotmiddot middot middot
Figure 7 The scenario model of the case
Mathematical Problems in Engineering 13
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
ProcessedobjectsM3
Number 1
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
ldquoSub
goalrdquo
Num
ber 1
pip
e weld
ing
ldquoSub
goalrdquo
Weld
ing
prep
arat
ion
ldquoSub
goalrdquo
Weld
ing
ldquoSub
goalrdquo
Posit
ion
ldquoSub
goalrdquo
Weld
ing
mat
eria
lspr
epar
atio
n
Subg
oal 2
Subg
oal 1
Subg
oal 1
P2
M1G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
WeldingM1G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
Man
-mac
hine
inte
ract
ion
Hum
an-a
rtifa
cts
inte
ract
ion
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
tG
estu
re o
fho
ldin
g to
ol
Subg
oal 2
Subg
oal 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
ldquoQua
lity
fact
orsrdquo
The q
ualit
y of
weld
ing
The s
urfa
ce q
ualit
yof
weld
ing
The c
olor
of
weld
ing
D3 D3 D3
6 12 12
Combination Combination Succession
Black Black Black
Non-well-distributed
Well-distributed
Well-distributed
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middot middot middot middot
pipe
Figure 8 The integrated model of the case
14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
where 119885 sube 119864(119863) and 119875 sube 119862 for a specified value of 120573The value 120574(119875119863 120573) measures the proportion of objects inthe universe (119880) for which a classification (based on decisionattributes119863) is possible at the specified value of 120573
532 VPRS Knowledge Extraction Algorithm The LEM2algorithm proposed by Grzymala-Busse [45] is one of themost widely used algorithms and many real-world applica-tions use this algorithm to extract knowledge The VPRSknowledge extraction algorithm (VPRS-KE) originated fromLEM2 and took the inclusion errors into account [46] Inour study VPRS-KE is used to elicit the specific motion andscenario factors in the technicianrsquos operation
In the VPRS-KE a heuristic strategy is used in thealgorithm to extract a minimum set of rules All of positiveregions and boundary region subsets can be denoted by 119884for each 119870 isin 119884 (the decision connecting with region 119870 is119863) Given that 119862 = 119888
1and 1198882and sdot sdot sdot and 119888
119899is the conjunction
of 119899 elementary conditions the objects in the decision tablecovered by 119862 can be expressed as follows
[119862] is the cover of rule 119862 on the decision table[119862]+
119870= [119862] cap 119870 is the positive cover of 119862 on119870
[119862]minus
119870= [119862] cap (119880 minus119870) is the negative cover of 119862 on119870
A decision rule is denoted by 119903The procedure of the rule extraction is summarized in
VPRS knowledge extraction algorithm as follows
Input119870 each of the positive regions or the boundaryregions subset in 119884 (119870 isin 119884) 120573 is the allowedinclusion error for VPRSOutput 119877 set of rules extracted from region119870Step 1 119866 larr 119870 119877 larr Φ
Step 2 While 119866 = Φ
Step 3 BeginStep 4 Initialize the condition set of a rule with anempty set 119862 larr Φ
Step 5 Initialize 119862Current with all the attributes andtheir values in 119866
119862Current larr997888 119888 [119888] cap 119866 = Φ (8)
Step 6 Iteratively add conditions to 119862 until set [119862] isincluded in the set119870with an inclusion error threshold120573
While (119862 = 120593) Or (119890([119862] 119870) le 120573) doBeginSelect 119886 isin 119862Current such that card([119886] cap 119866) ismaximumIf ties occur select 119886with the smallest card([119886])and if further ties occur select the first 119886 fromthe listAdd condition 119886 to 119862
119862 larr997888 119862 cup 119886 (9)
Eliminate the conditions which have beenalready used
119862Current larr997888 119888 [119888] cap 119866 = Φ (10)
Update 119862Current
119862Current larr997888 119862Current minus 119862 (11)
End
Step 7 Delete the redundant conditions
For each 119886 isin 119862 doIf 119890([119862 minus 119886] 119870) le 120573
Then 119862 larr997888 119862 minus 119886 (12)
End For
Step 8 Create a rule 119903 based on 119862 and put the ruleinto 119877
119877 larr997888 119877 cup 119903 (13)
Step 9 Remove the objects covered by 119877 from 119866
119866 larr997888 119866 minus ⋃
119903isin119877
[119903] (14)
Step 10 EndStep 11 Delete the redundant rules
For each 119903 isin 119877 do
If 119870 sube ⋃
119878isin(119877minus119903)
[119904] Then 119877 larr997888 119877 minus 119903 (15)
End For
Step 12 Output 119877
54 Intent Recognition In cognitive psychology intent refersto the thoughts one has before producing an action [47]Intent recognition is to identify the goal of observed sequenceofmotions and is performed by the action agent It is a processby which an agent can gain access to the goals of another andpredict its future actions and trajectories The understandingof human intent based on human motions remains a highlyrelevant and challenging research topic [48]
In our study the standard interview is employed todetect the underlying intent behind humanmotion First theskilled operators are interviewed to evaluate OEK contentand explain the specific intent behind the motion Secondthe advantage of skillful operations and the disadvantage ofunskillful operations will be recognized
55 Postprocessing In the postprocessing the related fac-tors of problem scenarios contributors and creditabilityare integrated into the OEK content and the completedrepresentation of OEK is constructed
10 Mathematical Problems in Engineering
Table 2 MODAPTS representation of operatorrsquos welding process fragment
Number Motion of left hand Motion of right handDiscomposed
motion descriptionMOD
representationDiscomposed
motion descriptionMOD
representation1 Grasp the pipe M4G1
2 Insert the pipe andadjust its position M4P2 Prepare the
welding gun M3P2
3 Hold the pipe H Start spot welding M1P0 times 119899
Figure 5 Shooting operatorrsquos operation
6 Case Study
In our study a manual welding case is used to illustrate theproposed OEK acquisitionmethodThis case originates froma real manufacturing companyrsquos production improvementproject
61 Identification of OEK Sources SQ company is a producerof new energy devices The main product of company isLNG (Liquefied Natural Gas) cylinders The welding processis widely used in the cylindersrsquo manufacturing The head ofinner vessel due to its complex internal structure cannot bemanufactured by autowelding Therefore manual welding isemployed in this process (Figure 5)
In actual manufacturing the varying quality of theproduct causes much trouble for the company The majorreason for the productrsquos quality variation lies in the differentwelding methods used by the workers Because the trainingof new employees needs a long time there are always novicesand skilled operators in the company Although the companyprovides the standard operation instructions the novicesusually find it hard to grasp the technique know-how Forthe skilled operators they often feel difficult to tell what theirempirical knowledge is and what kind of operation is the bestin guiding the novice Therefore it is an urgent mission toanalyze the operational know-how of the skilled operatorsand elicit their OEK
62 Motion Modeling
Step 1 (motion capture) Fifteen skilled technicians andfifteen novices were invited to take part in the case In this
step motion capture was carried out in the real operationsituation as shown in Figure 5 It is important for the videocamera to take a position that does not disturb the workerrsquosoperation In our study the wearable sensors were not chosensince they often burden theworker and affect human thinking[24]
Step 2 (motion analysis) TheMODAPTS analysis can trans-late the welding operation into basic motion element classcodes and time values through video examination [9] Forexample in an assembly process the operatorrsquos motionsequence includes ldquomove the left hand to the componentrdquoldquoget the componentrdquo ldquomove the componentrdquo and ldquoput thecomponentrdquo which are assigned the codes M3 G1 M3 andP1 respectively Thus the resulting motion MODAPTS isM3G1M3P1
In our study the welding process is represented alphanu-merically as motion element sets by means of IEMS softwareFigure 6 illustrates an example of a MODAPTS for sequen-tial welding operations consisting of grasping insertingadjusting and welding operations Table 2 presents theMOD representation of a fragment of the operatorrsquos weldingprocess
Step 3 (establish scenario model) In this step the result ofMODAPTS analysis is used to construct the scenario modelThe operatorrsquos motion combination andmotion sequence arethemain part of the scenariomodelThe goal and subgoals ofthe operator are the assistant part of scenario model
The scenario factors are considered in the scenariomodelIn our case the ldquoman-machine interactionrdquo includes twoparts the interaction between operator and objective and theinteraction between operator and tools
In the part of man-object interaction the factors consistof the position of the welding arc starting point the numberof rotations welding a pipe and the welding mode
In the part ofman-tool interaction the factors include thewelding gun posture in the difficult process part
The scenario model is shown in Figure 7
Step 4 (establish integrated model) The integrated modelis established by attaching the quality information of eachoperation to the scenario model
In the case the quality of welding process is evaluated bythe standard of the enterpriseThe evaluation criteria includethe weld surface color and the quality of the weld seam Theweld colors include white yellow and blackWhite is the best
Mathematical Problems in Engineering 11
(a) A case of welding process
② M3④ M1④ P2
③ P2
① M4
③ M4② G1
⑤ H
② M3
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0
(b) A MODAPTS analysis of welding process
Figure 6 The MODAPTS analysis of a welding process fragment
and black is the worst In addition the weld surface quality isdivided into three classes good medium and poor
The integrated model is shown in Figure 8
63 OEK Content Eliciting
(1) PreprocessingThe preprocessing is the fundamental of theeliciting algorithm in the next stage
According to the characteristics of motion sequence andthe requirement of VPRS algorithm the following steps areconducted
Step 1 Remove themeaninglessmotionswhich have nothingto do with the operation such as drinking and talking
Step 2 Combine the repetitive motions for example com-bining M2P1M2P1M2P1 into M2P1 times 3 If the repetitive timeofmotion combination ismore than 3 the time is representedas 119899
The structured result of preprocessing is shown in Table 3The explanation of header of Table 3 is as follows ID indicateseach operator Steps indicate the subgoals in the operationalprocess Arcing point the number of rotations and modechoosing are scenario factors Color and surface quality arethe evaluation indices of welding process quality In thecontent of table null indicates no operation in the step
(2) Eliciting Process In this step the initial OEK content iselicited by means of VPRS based on the result of preprocess-ing and is shown in Table 4
64 Intent Analysis In this case the skilled technicians whoparticipated in the experiment were interviewed to explainthe specific intent behind the motion The evaluation factorsnecessity and intent of the motions are listed in Table 5
65 Postprocessing In this stage the related factors of prob-lem scenarios contributors and creditability are integratedinto the OEK content A completed representation of theskilled operatorsrsquo OEK is obtained from the above stagesThestructured representation of OEK is shown in Table 6
7 Discussion
71 Comparison of OEK between Skilled Technicians andNovices The OEK obtained by our method is the specificknow-how coming from the experience of skilled operatorsuch knowledge indicates themotional difference in the criti-cal operational steps between skilled and unskilled operatorsIn this section wewill discuss such difference between skilledoperatorsrsquo OEK and novicesrsquo motions in order to evaluate thevalue of OEK
We analyze the difference from two aspects of timeconsumption and energy consumption performance in thesame operating procedures (Step 3 Step 5 and Step 6)We calculate the operatorsrsquo time from the operation videosIn order to measure the energy consumption of differentoperators CATIA as leading human factors engineeringsoftware is used as the platform to model the human motionand provide the energy consumption Figure 9 is the CATIAsimulation of different operators The results are shown inFigure 10
The difference of time consumption (156 s and 105 s)between skilled and unskilled operators is obvious accordingto Figure 10(a) However to our surprise the energy con-sumption of unskilled operators is more than three times thatof skilled operators (1190 cal and 313 cal see Figure 10(b))The plausible explanation is the importance of OEK whichnot only improves the product quality but also releases theoperatorsrsquo fatigue and then increases the operatorsrsquo safetyFurthermore the result of comparison demonstrates theaccuracy of OEK acquired by our method
72 Comparison of Our Method with Related Works Theevaluation framework of requirements of elicitation tech-nique is used in our study It is regarded as a reasonable andacceptablemethod to evaluate elicitation technique althoughit is a qualitative evaluation method [49] The evaluationframework includes four factors (elicitor informant problemdomain and elicitation process) and each factor includessome detailed attributes In the evaluation framework acompiled technique adequacy table is used to select the mostadequate techniques for a specific application context [50]In this section the evaluation framework is revised and usedto compare our study with related works in the context of
12 Mathematical Problems in Engineering
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
Processed objects
M3
No 1 pipe
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
Num
ber 1
pip
e weld
ing
Weld
ing
prep
arat
ion
Weld
ing
Posit
ion
Weld
ing
mat
eria
ls pr
epar
atio
n
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
P2
M1
G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
Welding
M1
G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
M
an-m
achi
ne in
tera
ctio
n
Hum
an-a
rtifa
cts
inte
ract
ion
ldquoSub
goalrdquo
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
t
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Ges
ture
of h
oldi
ng
tool
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
D3 D3 D3
6 12 12
Combination Combination Succession
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middotmiddot middot middot
Figure 7 The scenario model of the case
Mathematical Problems in Engineering 13
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
ProcessedobjectsM3
Number 1
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
ldquoSub
goalrdquo
Num
ber 1
pip
e weld
ing
ldquoSub
goalrdquo
Weld
ing
prep
arat
ion
ldquoSub
goalrdquo
Weld
ing
ldquoSub
goalrdquo
Posit
ion
ldquoSub
goalrdquo
Weld
ing
mat
eria
lspr
epar
atio
n
Subg
oal 2
Subg
oal 1
Subg
oal 1
P2
M1G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
WeldingM1G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
Man
-mac
hine
inte
ract
ion
Hum
an-a
rtifa
cts
inte
ract
ion
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
tG
estu
re o
fho
ldin
g to
ol
Subg
oal 2
Subg
oal 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
ldquoQua
lity
fact
orsrdquo
The q
ualit
y of
weld
ing
The s
urfa
ce q
ualit
yof
weld
ing
The c
olor
of
weld
ing
D3 D3 D3
6 12 12
Combination Combination Succession
Black Black Black
Non-well-distributed
Well-distributed
Well-distributed
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middot middot middot middot
pipe
Figure 8 The integrated model of the case
14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
Table 2 MODAPTS representation of operatorrsquos welding process fragment
Number Motion of left hand Motion of right handDiscomposed
motion descriptionMOD
representationDiscomposed
motion descriptionMOD
representation1 Grasp the pipe M4G1
2 Insert the pipe andadjust its position M4P2 Prepare the
welding gun M3P2
3 Hold the pipe H Start spot welding M1P0 times 119899
Figure 5 Shooting operatorrsquos operation
6 Case Study
In our study a manual welding case is used to illustrate theproposed OEK acquisitionmethodThis case originates froma real manufacturing companyrsquos production improvementproject
61 Identification of OEK Sources SQ company is a producerof new energy devices The main product of company isLNG (Liquefied Natural Gas) cylinders The welding processis widely used in the cylindersrsquo manufacturing The head ofinner vessel due to its complex internal structure cannot bemanufactured by autowelding Therefore manual welding isemployed in this process (Figure 5)
In actual manufacturing the varying quality of theproduct causes much trouble for the company The majorreason for the productrsquos quality variation lies in the differentwelding methods used by the workers Because the trainingof new employees needs a long time there are always novicesand skilled operators in the company Although the companyprovides the standard operation instructions the novicesusually find it hard to grasp the technique know-how Forthe skilled operators they often feel difficult to tell what theirempirical knowledge is and what kind of operation is the bestin guiding the novice Therefore it is an urgent mission toanalyze the operational know-how of the skilled operatorsand elicit their OEK
62 Motion Modeling
Step 1 (motion capture) Fifteen skilled technicians andfifteen novices were invited to take part in the case In this
step motion capture was carried out in the real operationsituation as shown in Figure 5 It is important for the videocamera to take a position that does not disturb the workerrsquosoperation In our study the wearable sensors were not chosensince they often burden theworker and affect human thinking[24]
Step 2 (motion analysis) TheMODAPTS analysis can trans-late the welding operation into basic motion element classcodes and time values through video examination [9] Forexample in an assembly process the operatorrsquos motionsequence includes ldquomove the left hand to the componentrdquoldquoget the componentrdquo ldquomove the componentrdquo and ldquoput thecomponentrdquo which are assigned the codes M3 G1 M3 andP1 respectively Thus the resulting motion MODAPTS isM3G1M3P1
In our study the welding process is represented alphanu-merically as motion element sets by means of IEMS softwareFigure 6 illustrates an example of a MODAPTS for sequen-tial welding operations consisting of grasping insertingadjusting and welding operations Table 2 presents theMOD representation of a fragment of the operatorrsquos weldingprocess
Step 3 (establish scenario model) In this step the result ofMODAPTS analysis is used to construct the scenario modelThe operatorrsquos motion combination andmotion sequence arethemain part of the scenariomodelThe goal and subgoals ofthe operator are the assistant part of scenario model
The scenario factors are considered in the scenariomodelIn our case the ldquoman-machine interactionrdquo includes twoparts the interaction between operator and objective and theinteraction between operator and tools
In the part of man-object interaction the factors consistof the position of the welding arc starting point the numberof rotations welding a pipe and the welding mode
In the part ofman-tool interaction the factors include thewelding gun posture in the difficult process part
The scenario model is shown in Figure 7
Step 4 (establish integrated model) The integrated modelis established by attaching the quality information of eachoperation to the scenario model
In the case the quality of welding process is evaluated bythe standard of the enterpriseThe evaluation criteria includethe weld surface color and the quality of the weld seam Theweld colors include white yellow and blackWhite is the best
Mathematical Problems in Engineering 11
(a) A case of welding process
② M3④ M1④ P2
③ P2
① M4
③ M4② G1
⑤ H
② M3
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0
(b) A MODAPTS analysis of welding process
Figure 6 The MODAPTS analysis of a welding process fragment
and black is the worst In addition the weld surface quality isdivided into three classes good medium and poor
The integrated model is shown in Figure 8
63 OEK Content Eliciting
(1) PreprocessingThe preprocessing is the fundamental of theeliciting algorithm in the next stage
According to the characteristics of motion sequence andthe requirement of VPRS algorithm the following steps areconducted
Step 1 Remove themeaninglessmotionswhich have nothingto do with the operation such as drinking and talking
Step 2 Combine the repetitive motions for example com-bining M2P1M2P1M2P1 into M2P1 times 3 If the repetitive timeofmotion combination ismore than 3 the time is representedas 119899
The structured result of preprocessing is shown in Table 3The explanation of header of Table 3 is as follows ID indicateseach operator Steps indicate the subgoals in the operationalprocess Arcing point the number of rotations and modechoosing are scenario factors Color and surface quality arethe evaluation indices of welding process quality In thecontent of table null indicates no operation in the step
(2) Eliciting Process In this step the initial OEK content iselicited by means of VPRS based on the result of preprocess-ing and is shown in Table 4
64 Intent Analysis In this case the skilled technicians whoparticipated in the experiment were interviewed to explainthe specific intent behind the motion The evaluation factorsnecessity and intent of the motions are listed in Table 5
65 Postprocessing In this stage the related factors of prob-lem scenarios contributors and creditability are integratedinto the OEK content A completed representation of theskilled operatorsrsquo OEK is obtained from the above stagesThestructured representation of OEK is shown in Table 6
7 Discussion
71 Comparison of OEK between Skilled Technicians andNovices The OEK obtained by our method is the specificknow-how coming from the experience of skilled operatorsuch knowledge indicates themotional difference in the criti-cal operational steps between skilled and unskilled operatorsIn this section wewill discuss such difference between skilledoperatorsrsquo OEK and novicesrsquo motions in order to evaluate thevalue of OEK
We analyze the difference from two aspects of timeconsumption and energy consumption performance in thesame operating procedures (Step 3 Step 5 and Step 6)We calculate the operatorsrsquo time from the operation videosIn order to measure the energy consumption of differentoperators CATIA as leading human factors engineeringsoftware is used as the platform to model the human motionand provide the energy consumption Figure 9 is the CATIAsimulation of different operators The results are shown inFigure 10
The difference of time consumption (156 s and 105 s)between skilled and unskilled operators is obvious accordingto Figure 10(a) However to our surprise the energy con-sumption of unskilled operators is more than three times thatof skilled operators (1190 cal and 313 cal see Figure 10(b))The plausible explanation is the importance of OEK whichnot only improves the product quality but also releases theoperatorsrsquo fatigue and then increases the operatorsrsquo safetyFurthermore the result of comparison demonstrates theaccuracy of OEK acquired by our method
72 Comparison of Our Method with Related Works Theevaluation framework of requirements of elicitation tech-nique is used in our study It is regarded as a reasonable andacceptablemethod to evaluate elicitation technique althoughit is a qualitative evaluation method [49] The evaluationframework includes four factors (elicitor informant problemdomain and elicitation process) and each factor includessome detailed attributes In the evaluation framework acompiled technique adequacy table is used to select the mostadequate techniques for a specific application context [50]In this section the evaluation framework is revised and usedto compare our study with related works in the context of
12 Mathematical Problems in Engineering
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
Processed objects
M3
No 1 pipe
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
Num
ber 1
pip
e weld
ing
Weld
ing
prep
arat
ion
Weld
ing
Posit
ion
Weld
ing
mat
eria
ls pr
epar
atio
n
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
P2
M1
G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
Welding
M1
G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
M
an-m
achi
ne in
tera
ctio
n
Hum
an-a
rtifa
cts
inte
ract
ion
ldquoSub
goalrdquo
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
t
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Ges
ture
of h
oldi
ng
tool
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
D3 D3 D3
6 12 12
Combination Combination Succession
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middotmiddot middot middot
Figure 7 The scenario model of the case
Mathematical Problems in Engineering 13
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
ProcessedobjectsM3
Number 1
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
ldquoSub
goalrdquo
Num
ber 1
pip
e weld
ing
ldquoSub
goalrdquo
Weld
ing
prep
arat
ion
ldquoSub
goalrdquo
Weld
ing
ldquoSub
goalrdquo
Posit
ion
ldquoSub
goalrdquo
Weld
ing
mat
eria
lspr
epar
atio
n
Subg
oal 2
Subg
oal 1
Subg
oal 1
P2
M1G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
WeldingM1G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
Man
-mac
hine
inte
ract
ion
Hum
an-a
rtifa
cts
inte
ract
ion
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
tG
estu
re o
fho
ldin
g to
ol
Subg
oal 2
Subg
oal 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
ldquoQua
lity
fact
orsrdquo
The q
ualit
y of
weld
ing
The s
urfa
ce q
ualit
yof
weld
ing
The c
olor
of
weld
ing
D3 D3 D3
6 12 12
Combination Combination Succession
Black Black Black
Non-well-distributed
Well-distributed
Well-distributed
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middot middot middot middot
pipe
Figure 8 The integrated model of the case
14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
(a) A case of welding process
② M3④ M1④ P2
③ P2
① M4
③ M4② G1
⑤ H
② M3
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0 ④ M1
⑤ P0
(b) A MODAPTS analysis of welding process
Figure 6 The MODAPTS analysis of a welding process fragment
and black is the worst In addition the weld surface quality isdivided into three classes good medium and poor
The integrated model is shown in Figure 8
63 OEK Content Eliciting
(1) PreprocessingThe preprocessing is the fundamental of theeliciting algorithm in the next stage
According to the characteristics of motion sequence andthe requirement of VPRS algorithm the following steps areconducted
Step 1 Remove themeaninglessmotionswhich have nothingto do with the operation such as drinking and talking
Step 2 Combine the repetitive motions for example com-bining M2P1M2P1M2P1 into M2P1 times 3 If the repetitive timeofmotion combination ismore than 3 the time is representedas 119899
The structured result of preprocessing is shown in Table 3The explanation of header of Table 3 is as follows ID indicateseach operator Steps indicate the subgoals in the operationalprocess Arcing point the number of rotations and modechoosing are scenario factors Color and surface quality arethe evaluation indices of welding process quality In thecontent of table null indicates no operation in the step
(2) Eliciting Process In this step the initial OEK content iselicited by means of VPRS based on the result of preprocess-ing and is shown in Table 4
64 Intent Analysis In this case the skilled technicians whoparticipated in the experiment were interviewed to explainthe specific intent behind the motion The evaluation factorsnecessity and intent of the motions are listed in Table 5
65 Postprocessing In this stage the related factors of prob-lem scenarios contributors and creditability are integratedinto the OEK content A completed representation of theskilled operatorsrsquo OEK is obtained from the above stagesThestructured representation of OEK is shown in Table 6
7 Discussion
71 Comparison of OEK between Skilled Technicians andNovices The OEK obtained by our method is the specificknow-how coming from the experience of skilled operatorsuch knowledge indicates themotional difference in the criti-cal operational steps between skilled and unskilled operatorsIn this section wewill discuss such difference between skilledoperatorsrsquo OEK and novicesrsquo motions in order to evaluate thevalue of OEK
We analyze the difference from two aspects of timeconsumption and energy consumption performance in thesame operating procedures (Step 3 Step 5 and Step 6)We calculate the operatorsrsquo time from the operation videosIn order to measure the energy consumption of differentoperators CATIA as leading human factors engineeringsoftware is used as the platform to model the human motionand provide the energy consumption Figure 9 is the CATIAsimulation of different operators The results are shown inFigure 10
The difference of time consumption (156 s and 105 s)between skilled and unskilled operators is obvious accordingto Figure 10(a) However to our surprise the energy con-sumption of unskilled operators is more than three times thatof skilled operators (1190 cal and 313 cal see Figure 10(b))The plausible explanation is the importance of OEK whichnot only improves the product quality but also releases theoperatorsrsquo fatigue and then increases the operatorsrsquo safetyFurthermore the result of comparison demonstrates theaccuracy of OEK acquired by our method
72 Comparison of Our Method with Related Works Theevaluation framework of requirements of elicitation tech-nique is used in our study It is regarded as a reasonable andacceptablemethod to evaluate elicitation technique althoughit is a qualitative evaluation method [49] The evaluationframework includes four factors (elicitor informant problemdomain and elicitation process) and each factor includessome detailed attributes In the evaluation framework acompiled technique adequacy table is used to select the mostadequate techniques for a specific application context [50]In this section the evaluation framework is revised and usedto compare our study with related works in the context of
12 Mathematical Problems in Engineering
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
Processed objects
M3
No 1 pipe
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
Num
ber 1
pip
e weld
ing
Weld
ing
prep
arat
ion
Weld
ing
Posit
ion
Weld
ing
mat
eria
ls pr
epar
atio
n
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
P2
M1
G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
Welding
M1
G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
M
an-m
achi
ne in
tera
ctio
n
Hum
an-a
rtifa
cts
inte
ract
ion
ldquoSub
goalrdquo
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
t
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Ges
ture
of h
oldi
ng
tool
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
D3 D3 D3
6 12 12
Combination Combination Succession
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middotmiddot middot middot
Figure 7 The scenario model of the case
Mathematical Problems in Engineering 13
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
ProcessedobjectsM3
Number 1
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
ldquoSub
goalrdquo
Num
ber 1
pip
e weld
ing
ldquoSub
goalrdquo
Weld
ing
prep
arat
ion
ldquoSub
goalrdquo
Weld
ing
ldquoSub
goalrdquo
Posit
ion
ldquoSub
goalrdquo
Weld
ing
mat
eria
lspr
epar
atio
n
Subg
oal 2
Subg
oal 1
Subg
oal 1
P2
M1G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
WeldingM1G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
Man
-mac
hine
inte
ract
ion
Hum
an-a
rtifa
cts
inte
ract
ion
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
tG
estu
re o
fho
ldin
g to
ol
Subg
oal 2
Subg
oal 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
ldquoQua
lity
fact
orsrdquo
The q
ualit
y of
weld
ing
The s
urfa
ce q
ualit
yof
weld
ing
The c
olor
of
weld
ing
D3 D3 D3
6 12 12
Combination Combination Succession
Black Black Black
Non-well-distributed
Well-distributed
Well-distributed
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middot middot middot middot
pipe
Figure 8 The integrated model of the case
14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
Processed objects
M3
No 1 pipe
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
Num
ber 1
pip
e weld
ing
Weld
ing
prep
arat
ion
Weld
ing
Posit
ion
Weld
ing
mat
eria
ls pr
epar
atio
n
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
P2
M1
G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
Welding
M1
G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
M
an-m
achi
ne in
tera
ctio
n
Hum
an-a
rtifa
cts
inte
ract
ion
ldquoSub
goalrdquo
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
t
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
Ges
ture
of h
oldi
ng
tool
Subg
oal 2
Su
bgoa
l 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
D3 D3 D3
6 12 12
Combination Combination Succession
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middotmiddot middot middot
Figure 7 The scenario model of the case
Mathematical Problems in Engineering 13
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
ProcessedobjectsM3
Number 1
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
ldquoSub
goalrdquo
Num
ber 1
pip
e weld
ing
ldquoSub
goalrdquo
Weld
ing
prep
arat
ion
ldquoSub
goalrdquo
Weld
ing
ldquoSub
goalrdquo
Posit
ion
ldquoSub
goalrdquo
Weld
ing
mat
eria
lspr
epar
atio
n
Subg
oal 2
Subg
oal 1
Subg
oal 1
P2
M1G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
WeldingM1G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
Man
-mac
hine
inte
ract
ion
Hum
an-a
rtifa
cts
inte
ract
ion
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
tG
estu
re o
fho
ldin
g to
ol
Subg
oal 2
Subg
oal 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
ldquoQua
lity
fact
orsrdquo
The q
ualit
y of
weld
ing
The s
urfa
ce q
ualit
yof
weld
ing
The c
olor
of
weld
ing
D3 D3 D3
6 12 12
Combination Combination Succession
Black Black Black
Non-well-distributed
Well-distributed
Well-distributed
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middot middot middot middot
pipe
Figure 8 The integrated model of the case
14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
M4
Position
Inspecting
Put
Start
Agent A
Grasp
Agent B SystemMotions line Agent N
M3
ProcessedobjectsM3
Number 1
M3
ldquoGoa
lrdquoPi
pes w
eldin
g
ldquoSub
goalrdquo
Num
ber 1
pip
e weld
ing
ldquoSub
goalrdquo
Weld
ing
prep
arat
ion
ldquoSub
goalrdquo
Weld
ing
ldquoSub
goalrdquo
Posit
ion
ldquoSub
goalrdquo
Weld
ing
mat
eria
lspr
epar
atio
n
Subg
oal 2
Subg
oal 1
Subg
oal 1
P2
M1G0
G1
E2
P5
M3
P1
P1
M3
M1
G1
P2
M1
P1
P1
ldquoSub
goalrdquo
Qua
lity
insp
ectio
n
ldquoSub
goalrdquo
Fiel
d in
spec
tion
Subg
oal 1
WeldingM1G0
D3
G1
M3
D3
M3
M3
D3
M3
E2
ldquoSce
nario
fact
orsrdquo
Man
-mac
hine
inte
ract
ion
Hum
an-a
rtifa
cts
inte
ract
ion
Hum
an-to
ols
inte
ract
ion
The n
umbe
r of
rota
tions
Arc
ing
poin
tG
estu
re o
fho
ldin
g to
ol
Subg
oal 2
Subg
oal 1
Subg
oal 1
Mod
e cho
osin
g
Subg
oal 3
ldquoQua
lity
fact
orsrdquo
The q
ualit
y of
weld
ing
The s
urfa
ce q
ualit
yof
weld
ing
The c
olor
of
weld
ing
D3 D3 D3
6 12 12
Combination Combination Succession
Black Black Black
Non-well-distributed
Well-distributed
Well-distributed
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
ldquoSub
goalrdquo
14 circle14 circle34 circle
middot middot middotmiddot middot middot middot middot middot
pipe
Figure 8 The integrated model of the case
14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

14 Mathematical Problems in Engineering
Table3Th
eresulto
fpreprocessin
g
IDStep1
Step2
Step3
Step4
Step5
Step6
Step7
Righth
and
Arcingpo
int
Then
umber
ofrotatio
nsMod
echoo
sing
Color
Surfa
cequ
ality
1M4P
2M3P
1times119899-M
3
M3-M1P0-
M4-M2P
1-M4
M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Well-
distr
ibuted
2M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
3M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
4M3P
2M3P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M3P
1times119899-M
3M1P0times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
5M3P
2M1P1
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
6M3P
2M4P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M1G
0times119899-M
3M1P0times119899
14circle
8Com
binatio
nYellow
Non
-well-
distr
ibuted
7M3P
2M2P
1times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
14circle
12Successio
nYello
wWell-
distr
ibuted
8M3P
5M3P
1times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
14circle
12Com
binatio
nYello
wWell-
distr
ibuted
9M3P
2M2P
1times119899-M
3M3-M1P0-
M3
Null
Null
M1P1times
119899M1G
0times119899-M
3M3P
1times119899
14circle
12Successio
nBlack
Well-
distr
ibuted
10M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M4-M3P
1-M3
M3P
1times119899
24circle
11Successio
nBlack
Well-
distr
ibuted
11M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
12M3P
2M1G
0times119899-M
3
M3-M1P0-
M4-M2P
1-M4
Null
Null
M1P1times
119899M1G
0times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
13M2P
0M1G
0times119899-M
3M3-M1P0-
M3
Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
14M4P
2M4P
1times119899-M
3M3-M1P0-
M3
M3P
1M4P
2M4P
2M3P
1M2P
1-M1P1
times119899
M2P
1times119899-M
3M3P
1times119899
24circle
16Com
binatio
nYello
wNon
-well-
distr
ibuted
15M3P
2M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1times119899
M1G
0times119899-M
3M3P
1times119899
24circle
12Successio
nBlack
Well-
distr
ibuted
16M3P
5M3
times119899-M
3M4-M2P
1times119899-M
4M3P
1M4P
2M4P
2M3P
1M1P1times
119899M3times119899-M
3M1P0times119899
24circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
17M4M
3P2
M3
times119899-M
3M4-M2P
1times119899-M
4Null
Null
M1P1times
119899M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
18M3P
5M1G
0times119899-M
3M4-M2P
1times119899-M
4Null
Null
M2P
1-M1P1
times119899
M3times119899-M
3M1P0times119899
34circle
6Com
binatio
nBlack
Non
-well-
distr
ibuted
Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 15
(a) Skilled technicianrsquos operation (b) Novicersquos operation
Figure 9 Operational simulation in CATIA
156
105
0
2
4
6
8
10
12
14
16
18
Unskillful operators Skillful operators
Time consumption (s)
Time consumption (s)
(a) Comparison of time consumption
1190
313
0
200
400
600
800
1000
1200
1400
Unskillful operators Skillful operators
Energy consumption (cal)
Energy consumption (cal)
(b) Comparison of energy consumption
Figure 10 Comparison of time consumption and energy consumption
engineering empirical knowledge elicitation The advantageand adequacy level of our method under the context ofengineering-oriented OEK acquisition are discussed as fol-lows
The classical qualitative methods (observation [8]) andapprenticeship [7]) a kind of quantitate method [14] anda kind of mixed method [5] are selected to be com-pared with our work Three experts of knowledge manage-ment (two experts are university professors of China andone expert is enterprisersquos senior manager) were invited toevaluate these methods using evaluation framework Theexhaustive description of factors is in the address httpwwwgriseupmessitesextras4adequacypdf The compar-ison among these methods is shown in Table 7
In Table 7 the attribute values are expressed as thenumber of high medium and low values Specifically inthe factors of elicitor and informant the method with fewerrequirements of person (elicitor and informant) is betterAccordingly the number of lowmedium andhigh values is 21 and 0 separately However in the factors of problemdomainand elicitation process the method with higher capabilities
in the problem domain and elicitation process is betterAccordingly the number of high medium and low values is2 1 and 0 separately and the number of short medium andlong values in the attribute of process time is 2 1 and 0 Theevaluation result is shown in the column of total score Theperformance of our method is best
The performance of methods in each factor is explainedin detail as follows (1) The first factor is the factor ofelicitor This factor includes two attributes requirement ofelicitation techniques and domain knowledge The mediumelicitation techniques and domain knowledge are requiredin our method for standard procedure is provided in ourmethod However the superior elicitation techniques anddomain knowledge are required in the qualitative methodsand mixed methods which rely on more interviews orobservation and thus require more elicitation techniquesand domain knowledge (2) The second factor is the factorof informant Three attributes are in this factor informantinvolvement in the elicitation process personality of infor-mant and articulability of expertrsquos empirical knowledge Inour method the requirements of informant involvement
16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

16 Mathematical Problems in Engineering
Table 4 Initial OEK content
ID Motion factors Scenario factors Product qualityStep 3 Step 5 Step 6 Right hand Arcing point Color Surface quality
001-LK M3-M1P0-M4-M2P1-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed002-YKB M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M1P0 times 119899 14 circle Yellow Well-distributed003-CSF M4-M2P1 times 119899-M4 M4P2M3P1 M2P1 times 119899 M3P1 times 119899 14 circle Yellow Well-distributed
Table 5 Intent analysis of critical dimensions
Factors Support Unrelated Oppose Conclusion Effect descriptionStep 3 10 0 0 Useful Obtain the high quality weldsStep 5 10 0 0 Useful Reduce the pause in the welding processStep 6 10 0 0 Useful Easy to operate and control strengthArcing point 8 2 0 Useful Obtain the high quality welds
and communication with informant are less than those inothermethods In addition articulability of expertrsquos empiricalknowledge in our method is medium (3) The third factoris the factor of problem domain Two attributes are in thisfactor problem definedness and knowledge description Ourmethod has obvious advantage compared to other methodsin this factor because the explicit definition and represen-tation of operational empirical knowledge of engineers areintroduced in our study These advantages can be recognizedin the description of OEK acquisition method (Section 5)and case study (Section 6) (4) The fourth factor is thefactor of elicitation process Two attributes are in this factorconvenience of elicitation process and process time Becauseof the explicit and standard knowledge acquisition process inour method our method is more convenient than others inelicitation process The preformation of our method in theprocess time is medium compared with other methods Insummary our method has many advantages compared withother methods under the context of engineering operationalknowledge elicitation
8 Conclusion
81 Contribution In our study we propose a conceptof engineering-oriented operational empirical knowledge(OEK) to describe the engineering-oriented operationalknow-how and provide the definition and representation ofengineering-oriented OEK A novel framework for acquiringengineering-oriented OEK from skilled technicianrsquos opera-tions is presented which can be used to elicit skilled tech-nicianrsquos valuable critical motion and intent The frameworkconstructs a completed knowledge acquisition process fromskilled worksrsquo operation to the structured OEK
The theoretical contribution of this study is multifoldFirst few researches articulate the engineering-orientedOEKand present quantitative acquisition method for this kind ofknowledge Our study attempts to propose operational defi-nition of engineering-oriented OEK and structured acquireframework which is innovation in the field of knowledgeacquisition Our acquisition framework covers the completedtacit knowledge transfer process while traditional methodstend to focus on the particular aspect or phase of tacit
knowledge acquisition Second our research provides thefundamentals for tacit knowledge sharing and reusing
The research findings provide some important applica-tion for practitioners Our method uses ldquothe language ofworkrdquo to describe the technicianrsquos operational process andprovide the exact representation of technicianrsquos operationalknow-how In addition the convenience and standardizationof our method facilitate application in the manufacturingenterprise The OEK obtained from skilled technician can bereplicated and reused within novices
82 Future Work and Limitation There are some limitationsin this study which provide directions for future study
One of the limitations is that knowledge engineers andtechnical professionals are involved in the knowledge acqui-sition process frequently Toomuch human involvement mayreduce the reliability of the acquisition method Howeversome researchers argued that human involvement is indis-pensable for tacit knowledge acquisition In the future how tocontrol the degree of human involvement in OEK acquisitionwill be studied Moreover the subtleties of human motioncannot be thoroughly described by the MODAPTS In thefuture how to identify the subtleties of human motion willbe studied
Though more and more manual operations have beenreplaced by robots in some special manufacturing processesthe manual working is still irreplaceable Therefore ourstudy is valuable for manufacturing enterprises to acquire thecritical operational know-how and improve the training ofnew employees
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
The authors are most grateful to National Natural ScienceFoundation of China (nos 70971085 and 71271133) theResearch Fund for the Doctoral Program of Higher Educa-tion of China (no 20100073110035) and Innovation Program
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
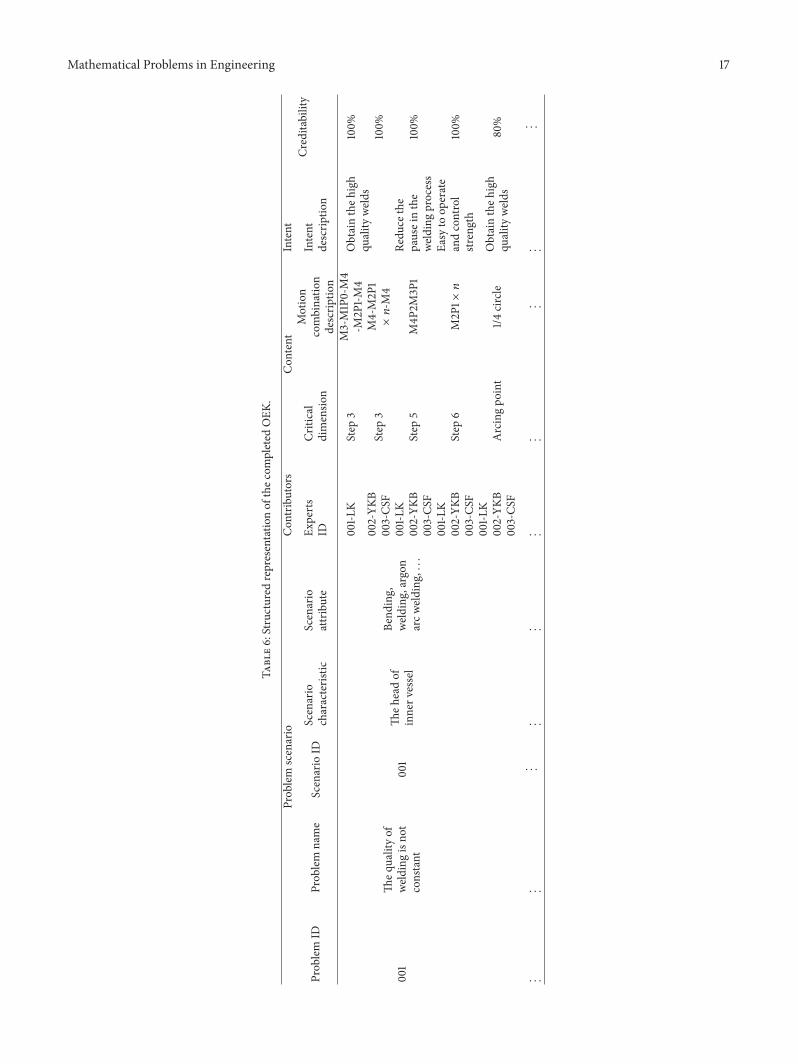
Mathematical Problems in Engineering 17
Table6Structured
representatio
nof
thec
ompleted
OEK
Prob
lem
scenario
Con
tributors
Con
tent
Intent
Creditability
Prob
lem
IDProb
lem
name
Scenario
IDScenario
characteris
ticScenario
attribute
Experts
IDCr
itical
dimensio
n
Motion
combinatio
ndescrip
tion
Intent
descrip
tion
001
Theq
ualityof
weld
ingisno
tconstant
001
Theh
eadof
innerv
essel
Bend
ing
weld
ingargon
arcw
elding
001-L
KStep3
M3-M1P0-M4
-M2P
1-M4
Obtaintheh
igh
quality
weld
s100
002-YK
B003-CS
FStep3
M4-M2P
1times119899-M
4100
001-L
K002-YK
B003-CS
FStep5
M4P
2M3P
1Re
duce
the
pauseinthe
weld
ingprocess
100
001-L
K002-YK
B003-CS
FStep6
M2P
1times119899
Easy
toop
erate
andcontrol
strength
100
001-L
K002-YK
B003-CS
FArcingpo
int
14circle
Obtaintheh
igh
quality
weld
s80
18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

18 Mathematical Problems in Engineering
Table 7 The comparison between our study and other methods
Evaluation index
Values
Methods
Factor Attribute
Bandura [8]andCollis
and Winnips[7]
Nakagawa etal [14] andHuang et al
[15]
Yoshida et al[5] This study
Elicitor
Requirementsof elicitationtechniques
Lowmediumhigh M M H M
Knowledge of(familiaritywith) domain
Lowmediumhigh H M H M
Informant
Involvementof informant Lowmediumhigh H M H M
Personality ofinformant Lowmediumhigh H M M L
Articulabilityof knowledge Lowmediumhigh L M M M
Problemdomain
Knowledgedescription Highmediumlow L M L H
Problemdefinedness Highmediumlow L H M H
Elicitationprocess
Convenience Highmediumlow L M M HProcess time Shortmediumlong L L S M
Total score 3 9 6 13
of Shanghai Municipal Education Commission (13ZZ012) forfinancial supports that made this research possible
References
[1] O Brdiczka and V Bellotti ldquoIdentifying routine and telltaleactivity patterns in knowledge workrdquo in Proceedings of the FifthIEEE International Conference on Semantic Computing (ICSCrsquo11) pp 95ndash101 IEEE Palo Alto Calif USA September 2011
[2] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE November 2014
[3] A Chennamaneni and J T C Teng ldquoAn integrated frameworkfor effective tacit knowledge transferrdquo in Proceedings of the 17thAmericas Conference on Information Systems 2011 (AMCIS rsquo11)pp 2471ndash2480 Detroit Mich USA August 2011
[4] AHaug ldquoThe illusion of tacit knowledge as the great problem inthe development of product configuratorsrdquoArtificial Intelligencefor Engineering Design Analysis and Manufacturing vol 26 no1 pp 25ndash37 2012
[5] I Yoshida Y Teramoto H Tabata C Han and H HashimotoldquoTacit knowledge extraction of skillful operation from expertengineersrdquo in Proceedings of the IEEEASME InternationalConference on Advanced Intelligent Mechatronics (AIM rsquo11) pp554ndash559 IEEE Budapest Hungary July 2011
[6] R K Wagner and R J Sternberg ldquoPractical intelligence inreal-world pursuits the role of tacit knowledgerdquo Journal ofPersonality and Social Psychology vol 49 no 2 pp 436ndash4581985
[7] B Collis and K Winnips ldquoTwo scenarios for productivelearning environments in the workplacerdquo British Journal ofEducational Technology vol 33 no 2 pp 133ndash148 2002
[8] A Bandura Social Learning Theory General Learning PressNew York NY USA 1977
[9] H Cho S Lee and J Park ldquoTime estimation method formanual assembly using MODAPTS technique in the productdesign stagerdquo International Journal of Production Research vol52 no 12 pp 3595ndash3613 2014
[10] I Nonaka ldquoA dynamic theory of organizational knowledgecreationrdquo Organization Science vol 5 no 1 pp 14ndash37 1994
[11] M G Sobol and D Lei ldquoEnvironment manufacturing technol-ogy and embedded knowledgerdquo International Journal ofHumanFactors in Manufacturing vol 4 no 2 pp 167ndash189 1994
[12] H Hashimoto I Yoshida Y Teramoto H Tabata and CHan ldquoExtraction of tacit knowledge as expert engineerrsquos skillbased on mixed human sensingrdquo in Proceedings of the 20thIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN rsquo11) pp 413ndash418 IEEE Atlanta GaUSA August 2011
[13] K Watanuki ldquoA mixed reality-based emotional interactionsand communications for manufacturing skills trainingrdquo inEmotional Engineering S Fukuda Ed pp 39ndash61 SpringerLondon UK 2011
[14] J Nakagawa Q An Y Ishikawa et al ldquoExtraction and evalua-tion of proficiency in bed care motion for education service ofnursing skillrdquo in Proceedings of the 2nd International Conferenceon Serviceology (ICServ rsquo14) pp 91ndash96 2014
[15] ZHuang ANagataM Kanai-Pak et al ldquoAutomatic evaluationof trainee nursesrsquo patient transfer skills using multiple kinectsensorsrdquo IEICE Transactions on Information and Systems vol97 no 1 pp 107ndash118 2014
Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 19
[16] N Li A J Schreiber W Cohen and K Koedinger ldquoEfficientcomplex skill acquisition through representation learningrdquoAdvances in Cognitive Systems no 2 pp 149ndash166 2012
[17] K Mitsuhashi H Hashimoto and Y Ohyama ldquoMotion curvedsurface analysis and composite for skill succession using RGBDcamerardquo in Proceedings of the 12th International Conference onInformatics in Control Automation and Robotics (ICINCO rsquo15)pp 406ndash413 Alsace France July 2015
[18] I Nonaka and H TakeuchiThe Knowledge-Creating CompanyHow Japanese Companies Create the Dynamics of InnovationOxford University Press New York NY USA 1995
[19] I Nonaka and R Toyama ldquoThe knowledge-creating theoryrevisited knowledge creation as a synthesizing processrdquoKnowl-edge Management Research amp Practice vol 1 no 1 pp 2ndash102003
[20] K M Ford J M Bradshaw J R Adams-Webber and N MAgnew ldquoKnowledge acquisition as a constructive modelingactivityrdquo International Journal of Intelligent Systems vol 8 no1 pp 9ndash32 1993
[21] W Y Zhang S B Tor and G A Britton ldquoA two-levelmodelling approach to acquire functional design knowledgein mechanical engineering systemsrdquo International Journal ofAdvancedManufacturing Technology vol 19 no 6 pp 454ndash4602002
[22] J N Liu YHu andYHe ldquoA set covering based approach to findthe reduct of variable precision rough setrdquo Information SciencesAn International Journal vol 275 pp 83ndash100 2014
[23] L Liu Z Jiang and B Song ldquoA novel two-stage methodfor acquiring engineering-oriented empirical tacit knowledgerdquoInternational Journal of Production Research vol 52 no 20 pp5997ndash6018 2014
[24] L T Nguyen and J Zhang ldquoUnsupervised work knowledgemining through mobility and physical activity sensingrdquo inProceedings of the 6th International Conference on MobileComputing Applications and Services (MobiCASE rsquo14) pp 30ndash39 IEEE Austin Tex USA November 2014
[25] J Liu andXHu ldquoA reuse oriented representationmodel for cap-turing and formalizing the evolving design rationalerdquo ArtificialIntelligence for Engineering Design Analysis andManufacturingvol 27 no 4 pp 401ndash413 2013
[26] S Popadiuk and C W Choo ldquoInnovation and knowledgecreation how are these concepts relatedrdquo International Journalof Information Management vol 26 no 4 pp 302ndash312 2006
[27] S S R Abidi Y-NCheah and J Curran ldquoA knowledge creationinfo-structure to acquire and crystallize the tacit knowledge ofhealth-care expertsrdquo IEEE Transactions on Information Technol-ogy in Biomedicine vol 9 no 2 pp 193ndash204 2005
[28] L Zhongtu W Qifu and C Liping ldquoA knowledge-basedapproach for the task implementation in mechanical productdesignrdquo The International Journal of Advanced ManufacturingTechnology vol 29 no 9 pp 837ndash845 2006
[29] D Leonard-Barton ldquoCore capabilities and core rigidities aparadox in managing new product developmentrdquo StrategicManagement Journal vol 13 no S1 pp 111ndash125 1992
[30] A Abecker S Aitken F Schmalhofer and B TschaitschianldquoKARATEKIT tools for the knowledge-creating companyrdquo inProceedings of the Knowledge Acquisition for Knowledge-BasedSystems Workshop (KAW rsquo98) pp 18ndash23 Banff Canada April1998
[31] G CHeydeModapts Plus HeydeDynamics Sydney Australia1983
[32] D W Karger and F H Bayha Engineered Work MeasurementThe Industrial Press New York NY USA 1966
[33] K B Zandin MOST Work Measurement Systems CRC PressBoca Raton Fla USA 2002
[34] A Freivalds and J Goldberg ldquoSpecification of base for variablerelaxation allowancerdquo Journal of Methods Time Measurementno 14 pp 2ndash29 1988
[35] H Cho and J Park ldquoMotion-based method for estimatingtime required to attach self-adhesive insulatorsrdquoCADComputerAided Design vol 56 pp 68ndash87 2014
[36] B W Niebel Motion and Time Study Irwin Homewood IllUSA 8th edition 1988
[37] L de Brabandere and A Iny ldquoScenarios and creativity thinkingin new boxesrdquo Technological Forecasting and Social Change vol77 no 9 pp 1506ndash1512 2010
[38] P Brezillon ldquoContext in problem solving a surveyrdquo KnowledgeEngineering Review vol 14 no 1 pp 47ndash80 1999
[39] C Y Potts ldquoUsing schematic scenarios to understand userneedsrdquo in Proceedings of the ACM 1st Conference on DesigningInteractive Systems Processes Practices Methods amp Techniques(DIS rsquo95) pp 247ndash256 1995
[40] Y Leung W-Z Wu andW-X Zhang ldquoKnowledge acquisitionin incomplete information systems a rough set approachrdquoEuropean Journal of Operational Research vol 168 no 1 pp164ndash180 2005
[41] J-S Mi W-Z Wu and W-X Zhang ldquoApproaches to knowl-edge reduction based on variable precision rough set modelrdquoInformation Sciences vol 159 no 3-4 pp 255ndash272 2004
[42] Z Pawlak ldquoRough setsrdquo International Journal of Computer ampInformation Sciences vol 11 no 5 pp 341ndash356 1982
[43] W Ziarko ldquoVariable precision rough set modelrdquo Journal ofComputer and System Sciences vol 46 no 1 pp 39ndash59 1993
[44] C-T Su and J-H Hsu ldquoPrecision parameter in the variableprecision rough sets model an applicationrdquo Omega vol 34 no2 pp 149ndash157 2006
[45] J W Grzymala-Busse ldquoLERSmdasha system for learning fromexamples based on rough setsrdquo in Intelligent Decision SupportHandbook of Applications and Advances of the Rough Sets The-ory R Slowinski Ed pp 3ndash18 Kluwer Academic DordrechtThe Netherlands 1992
[46] X Pan S Zhang H Zhang X Na and X Li ldquoA variableprecision rough set approach to the remote sensing landusecover classificationrdquo Computers amp Geosciences vol 36 no12 pp 1466ndash1473 2010
[47] D M Wegner ldquoPrecis of the illusion of conscious willrdquoBehavioral and Brain Sciences vol 27 no 5 pp 649ndash659 2004
[48] H S Kim J M Kim and W G Lee ldquoIE behavior intent astudy on ICT ethics of college students in koreardquo Asia-PacificEducation Researcher vol 23 no 2 pp 237ndash247 2014
[49] Y Rana and A Tamara ldquoAn enhanced requirements elicita-tion framework based on business process modelsrdquo ScientificResearch and Essays vol 10 no 7 pp 279ndash286 2015
[50] D Carrizo O Dieste and N Juristo ldquoSystematizing require-ments elicitation technique selectionrdquo Information and SoftwareTechnology vol 56 no 6 pp 644ndash669 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of