real time traffic management - challenges and solutions
TRANSCRIPT
Real-Time Traffic Management: Challenges and Solutions
Ke HanLecturer (Assistant Professor)
Center for Transport StudiesDepartment of Civil and Environmental Engineering, Imperial College London
[email protected]/people/k.han
Outline
1. Overview
2. The CARBOTRAF Project
3. Decision Rule Approach for Real-Time Operation
Real-Time Traffic Management
v Challenges
Ø Timeliness of decisionsØ Nonlinear and nonconvex objectiveØ Multiple objectivesØ Insufficient telecom capacity (centralized vs. distributed)Ø Uncertainties and insufficient data coverage
v New Opportunities (more challenges?)Ø Multi-source and heterogeneous data (e.g. mobile data, social media)Ø New collection/communication methods (e.g. crowd sourcing)Ø Need for more robust and fundamentally new theories and methods
Outline
1. Overview
2. The CARBOTRAF Project
3. Decision Rule Approach for Real-Time Operation
The CARBOTRAF Project
“A Decision Support System for reduced emissions of CO2 and Black Carbon through Adaptive Traffic Management”
Ø Scenario evaluation using traffic and environmental modelling tools
Ø Online status updates and decision support
Ø Ambient monitoring for evaluation, feedback and learning
Ø Two “Pilot Cities” (Glasgow and Graz)
Ø Decision Support System with GUI for Traffic Operators
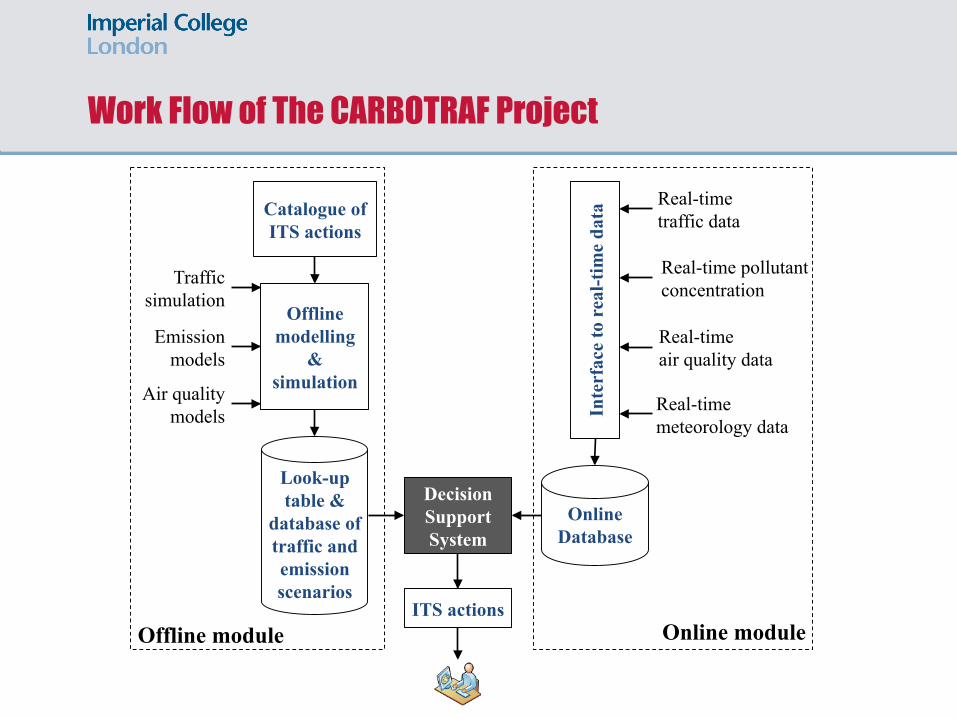
Work Flow of The CARBOTRAF Project
Offline modelling
& simulation
Decision Support System
Online Database
Inte
rfac
e to
rea
l-tim
e da
ta Real-time
traffic data
ITS actions
Catalogue of ITS actions
Traffic simulation
Emission models
Air quality models
Look-up table &
database of traffic and emission scenarios
Real-time pollutant concentration
Real-time air quality data
Real-time meteorology data
Offline module Online module
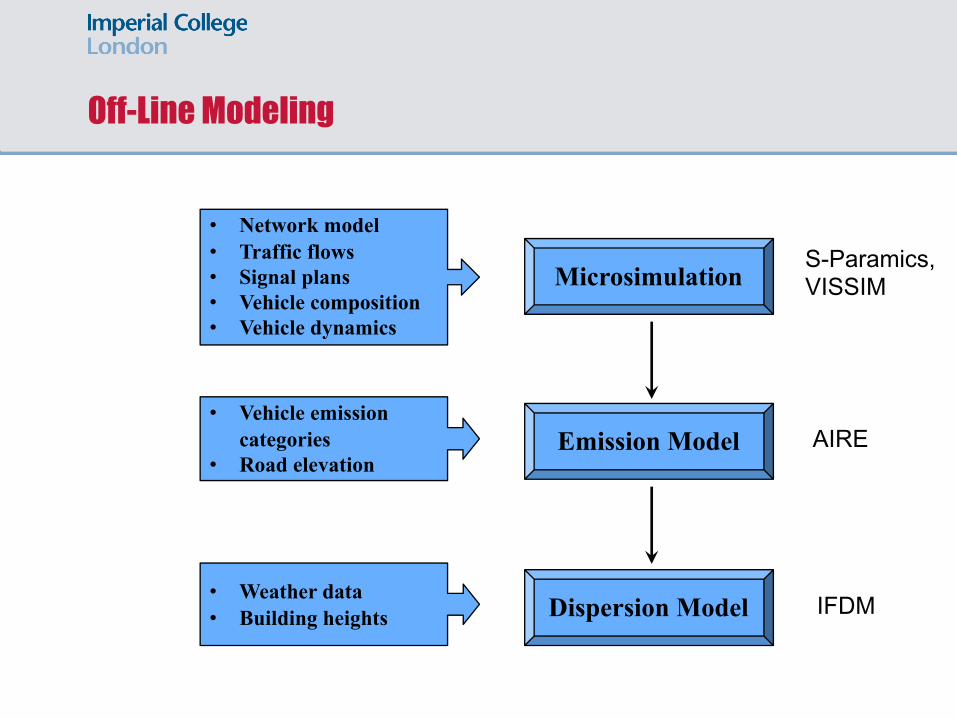
Off-Line Modeling
Microsimulation
Emission Model
Dispersion Model
• Network model• Traffic flows• Signal plans• Vehicle composition• Vehicle dynamics
• Vehicle emissioncategories
• Road elevation
• Weather data• Building heights
S-Paramics,VISSIM
AIRE
IFDM

Test Site in West Glasgow
Key Performance Indicators
v TrafficØ Travel timeØ SpeedØ Delay
v Environment
Ø Black CarbonØ CO2Ø Nox
v Spatial referencesØ Network wideØ CorridorØ Junction
Great Western Rd.
Kel
vin
Way
University Av.
VMS
TSC
city center
The CARBOTRAF Project

Reduction of BC Concentration with ITS Actions
BC conc (µg/m3) ITS – Base Scenario Boundary condition 1
BC conc (µg/m3) ITS – Base Scenario Boundary condition 2
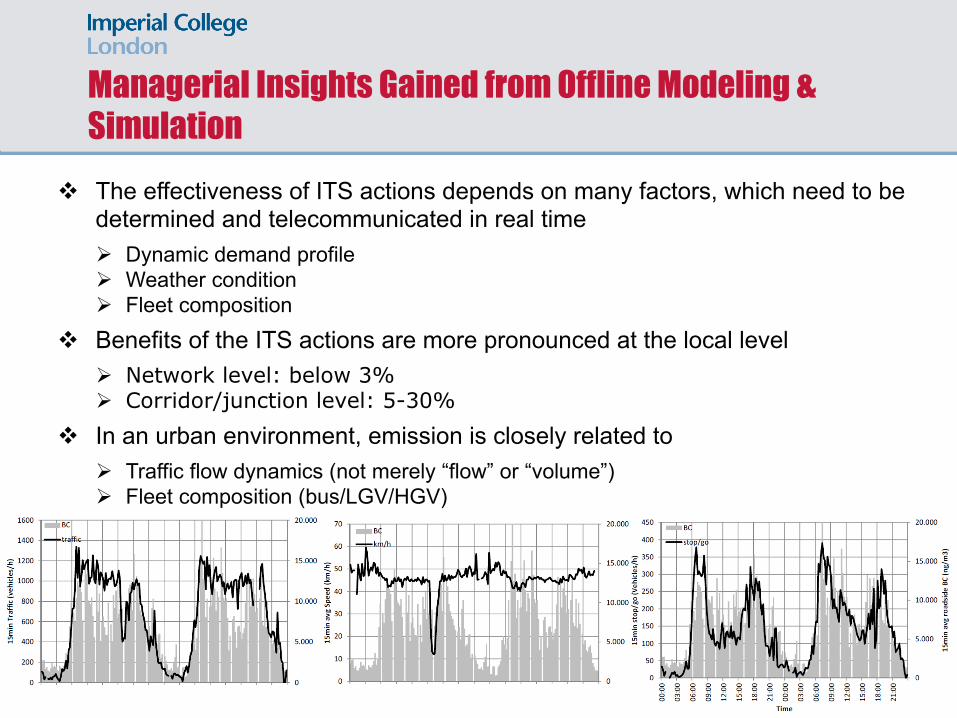
Managerial Insights Gained from Offline Modeling & Simulation
v The effectiveness of ITS actions depends on many factors, which need to be determined and telecommunicated in real timeØ Dynamic demand profileØ Weather conditionØ Fleet composition
v Benefits of the ITS actions are more pronounced at the local levelØ Network level: below 3%Ø Corridor/junction level: 5-30%
v In an urban environment, emission is closely related to Ø Traffic flow dynamics (not merely “flow” or “volume”)Ø Fleet composition (bus/LGV/HGV)

Decision Support System
v The DSS combines streaming data and the off-line LUT to rank different candidate ITS actions
v Input:Ø Current ITS action deployedØ Probability distributions of KPIs for the complete set of alternative actions
(LUT)Ø Operational constraints on the set of ITS actions
v Minimization problem (in real time):
v Potential issues:Ø Resolution of the Look-Up TableØ Expectation highly susceptible to outliers and errorsØ Computationally expensive, with additional lags -- Traffic Prediction Tool (Min and
Wynter, 2011)
Outline
1. Overview
2. The CARBOTRAF Project
3. Decision Rule Approach for Real-Time Operation
Analytical/closed-form
transformation
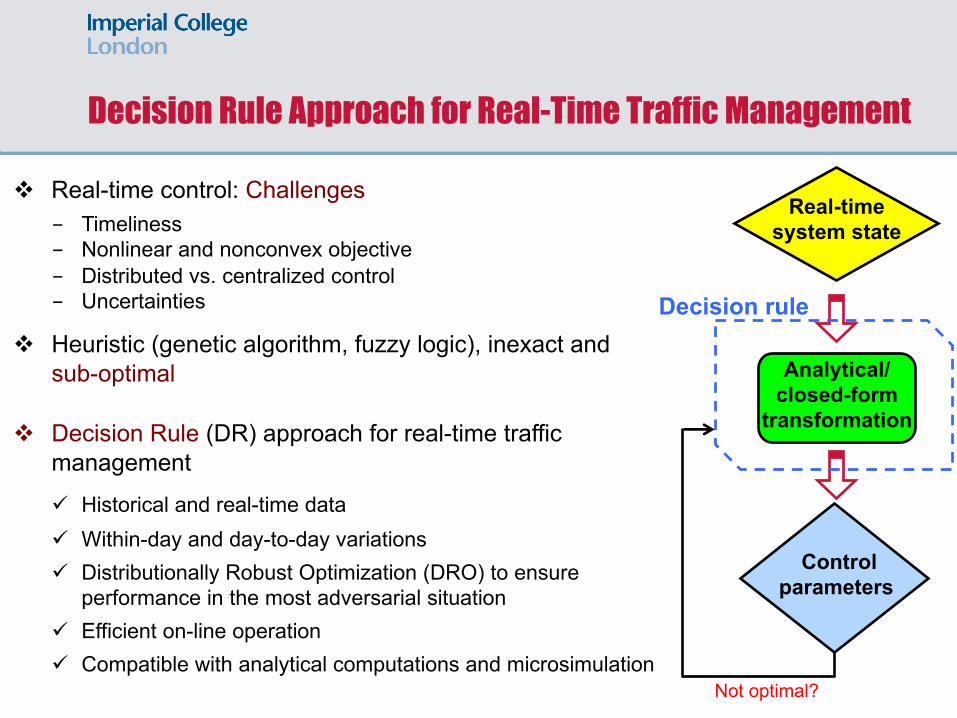
Decision Rule Approach for Real-Time Traffic Management
v Real-time control: Challenges- Timeliness- Nonlinear and nonconvex objective- Distributed vs. centralized control- Uncertainties
v Heuristic (genetic algorithm, fuzzy logic), inexact and sub-optimal
v Decision Rule (DR) approach for real-time traffic management
ü Historical and real-time dataü Within-day and day-to-day variationsü Distributionally Robust Optimization (DRO) to ensure
performance in the most adversarial situationü Efficient on-line operationü Compatible with analytical computations and microsimulation
Real-timesystem state
Controlparameters
Not optimal?
Decision rule

Decision Rule: ConceptOff-line moduleOn-line module
Analytical/ closed-form
transformation
Real-time traffic state
Real-time decision
Decision rule
Offline training
Real-time traffic state Historical
traffic state
Look-up table
Traffic prediction
tool
Real-time decision
Historical traffic state
Offline simulation
Decision rule approach CARBOTRAF approach
Stochastic optimization
Offline simulation
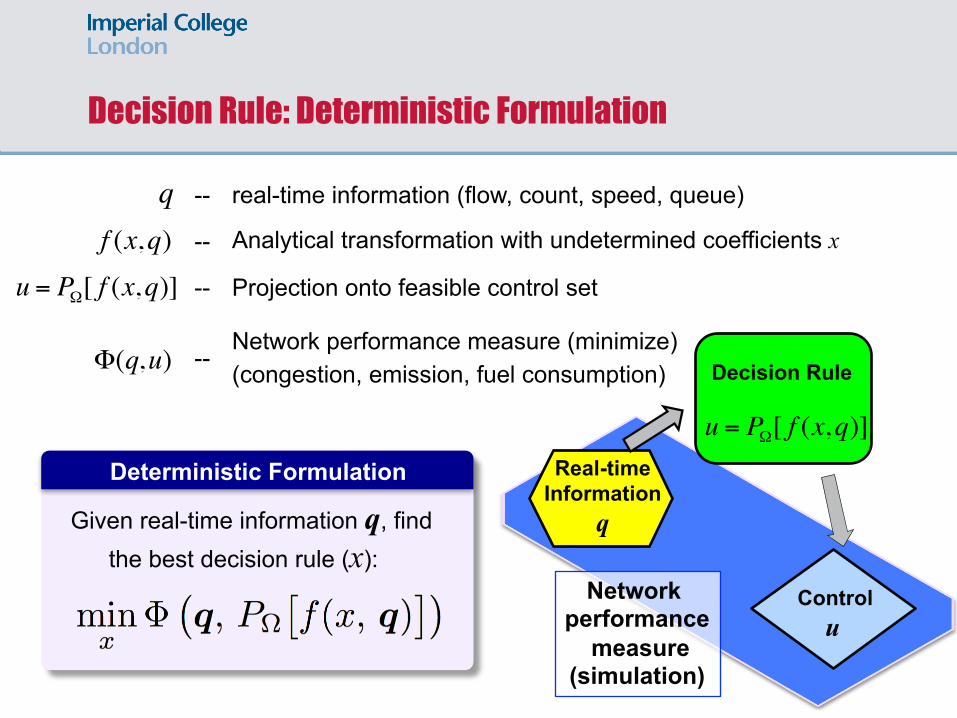
-- real-time information (flow, count, speed, queue)
-- Analytical transformation with undetermined coefficients x
-- Projection onto feasible control set
--Network performance measure (minimize) (congestion, emission, fuel consumption)
Real-timeInformation
q
Controlu
Decision Rule
Network performance
measure(simulation)
Φ(q,u)
f (x,q)u = PΩ[ f (x,q)]
Decision Rule: Deterministic Formulation
q
Deterministic Formulation
Given real-time information q, find the best decision rule (x):
u = PΩ[ f (x,q)]
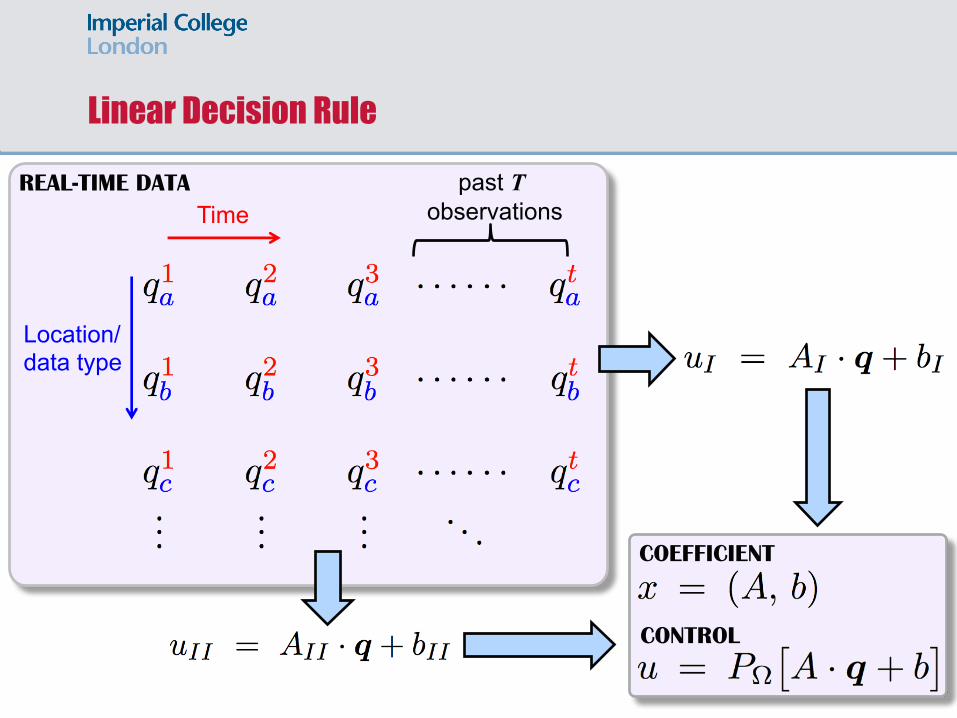
Linear Decision Rule
Time
Location/data type
past Tobservations
REAL-TIME DATA
CONTROL
COEFFICIENT
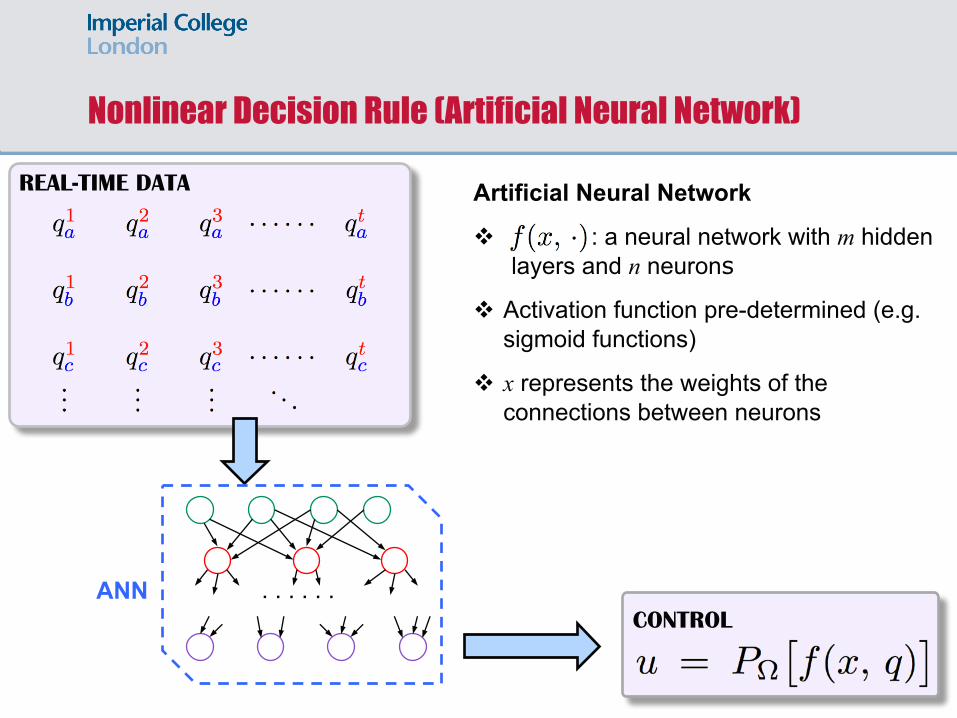
Nonlinear Decision Rule (Artificial Neural Network)
REAL-TIME DATA
CONTROLANN . . . . . .
Artificial Neural Network
v : a neural network with m hidden layers and n neurons
v Activation function pre-determined (e.g. sigmoid functions)
v x represents the weights of the connections between neurons
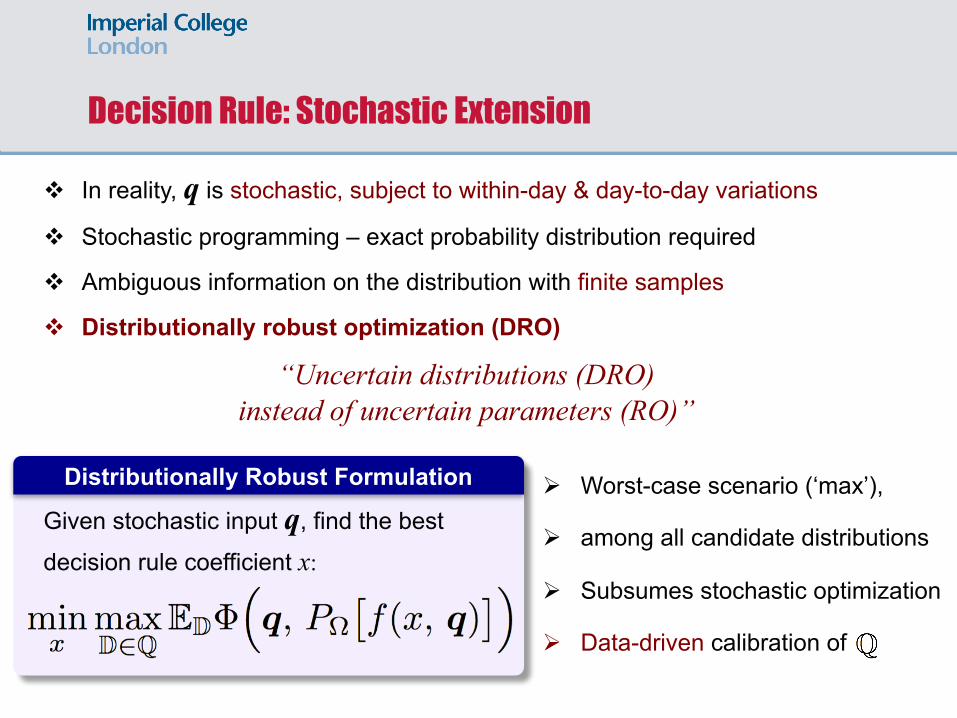
Decision Rule: Stochastic Extension
v In reality, q is stochastic, subject to within-day & day-to-day variations
v Stochastic programming – exact probability distribution required
v Ambiguous information on the distribution with finite samples
v Distributionally robust optimization (DRO)
Ø Worst-case scenario (‘max’),
Ø among all candidate distributions
Ø Subsumes stochastic optimization
Ø Data-driven calibration of
Distributionally Robust Formulation
Given stochastic input q, find the best
decision rule coefficient x:
“Uncertain distributions (DRO) instead of uncertain parameters (RO)”
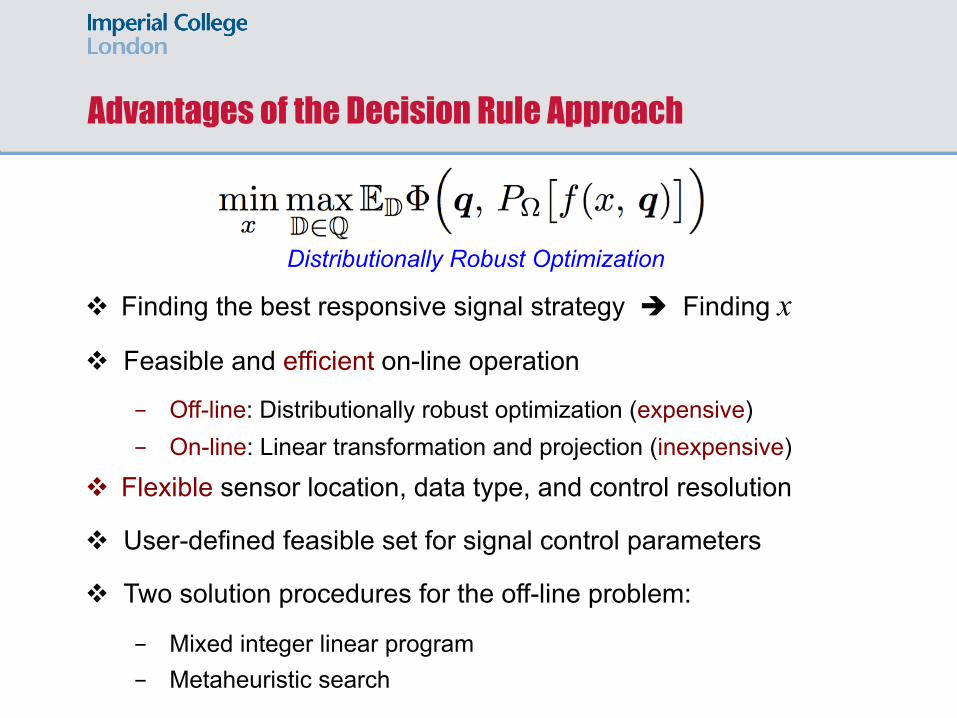
Advantages of the Decision Rule Approach
v Finding the best responsive signal strategy è Finding x
v Feasible and efficient on-line operation
- Off-line: Distributionally robust optimization (expensive)- On-line: Linear transformation and projection (inexpensive)
v Flexible sensor location, data type, and control resolution
v User-defined feasible set for signal control parameters
v Two solution procedures for the off-line problem:
- Mixed integer linear program- Metaheuristic search
Distributionally Robust Optimization
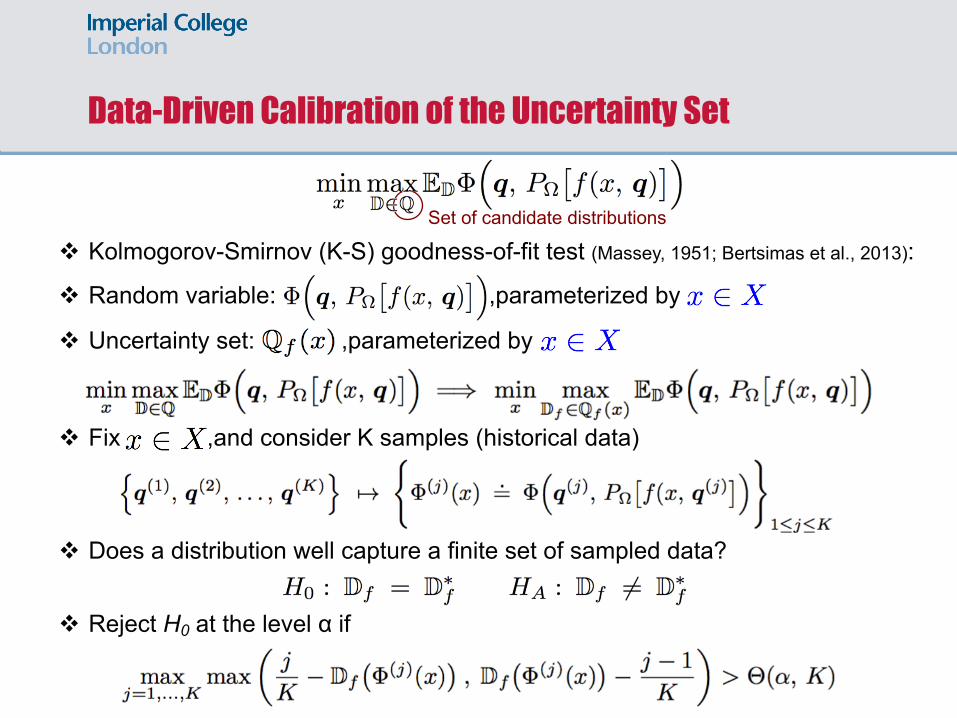
v Kolmogorov-Smirnov (K-S) goodness-of-fit test (Massey, 1951; Bertsimas et al., 2013):
v Random variable: ,parameterized by
v Uncertainty set: ,parameterized by
v Fix ,and consider K samples (historical data)
v Does a distribution well capture a finite set of sampled data?
v Reject H0 at the level α if
Data-Driven Calibration of the Uncertainty Set
Set of candidate distributions
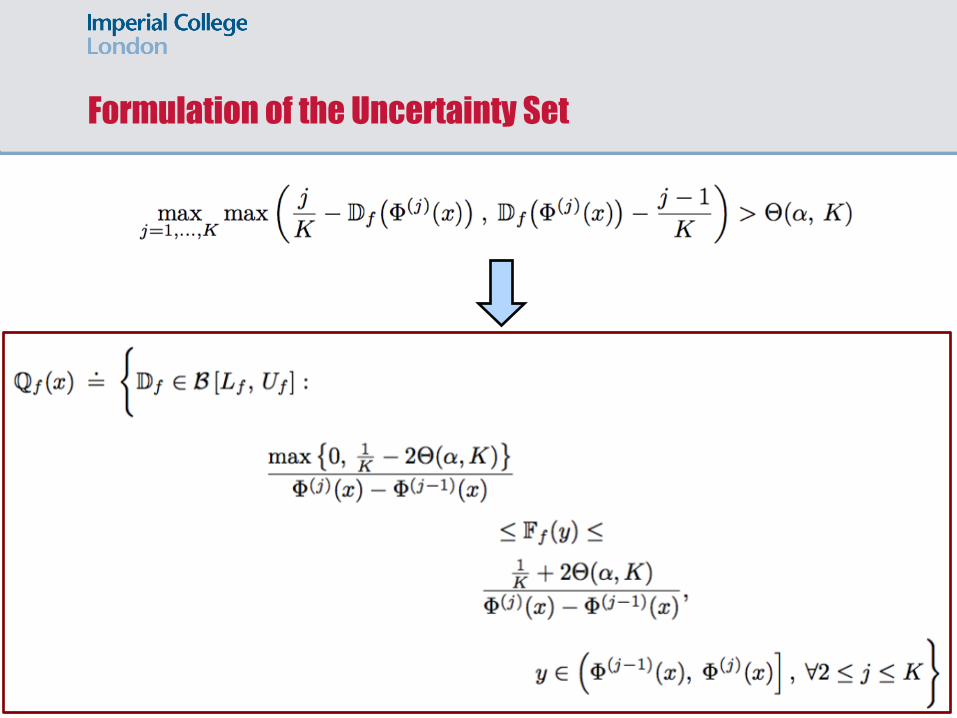
Formulation of the Uncertainty Set
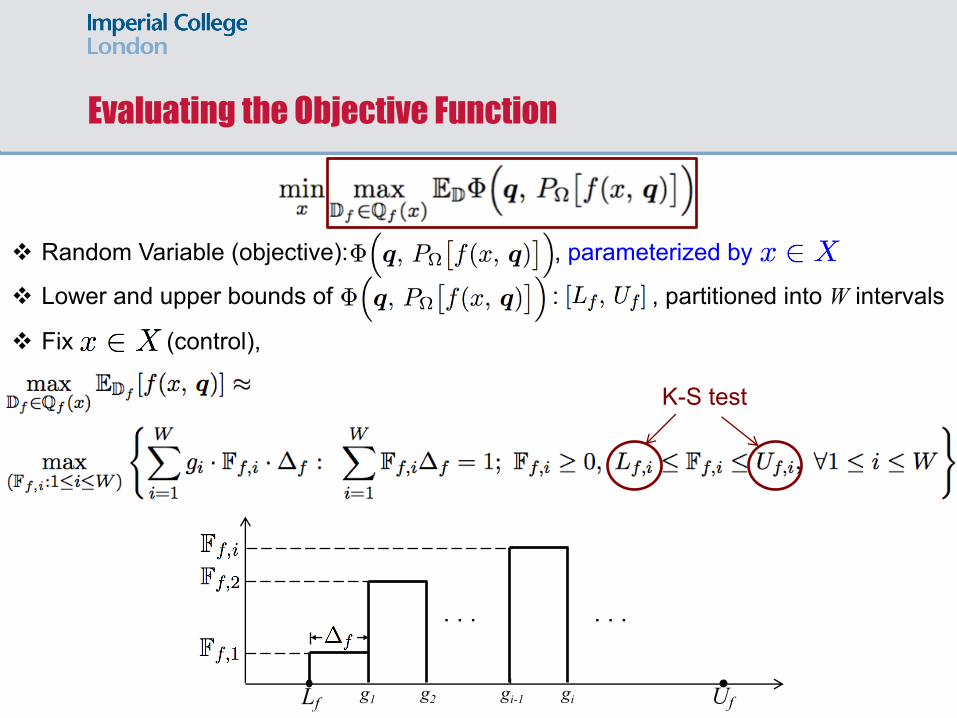
Evaluating the Objective Function
v Random Variable (objective): , parameterized by
v Lower and upper bounds of : , partitioned into W intervals
v Fix (control),
g1Lf Ufg2 gi-1 gi
. . . . . .
K-S test
Numerical Study, Part 1
Great Western Rd
Great Western Rd
Byre
s Rd
City Center
University of Glasgow
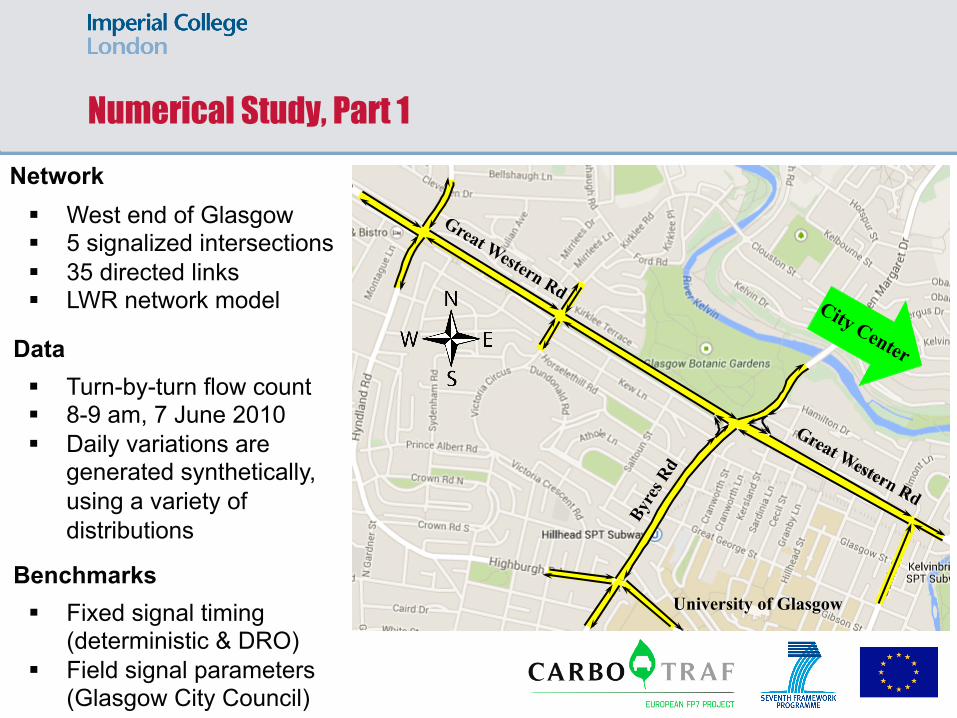
§ West end of Glasgow§ 5 signalized intersections§ 35 directed links§ LWR network model
Network
Data§ Turn-by-turn flow count§ 8-9 am, 7 June 2010§ Daily variations are
generated synthetically,using a variety of distributions
Benchmarks§ Fixed signal timing
(deterministic & DRO)§ Field signal parameters
(Glasgow City Council)
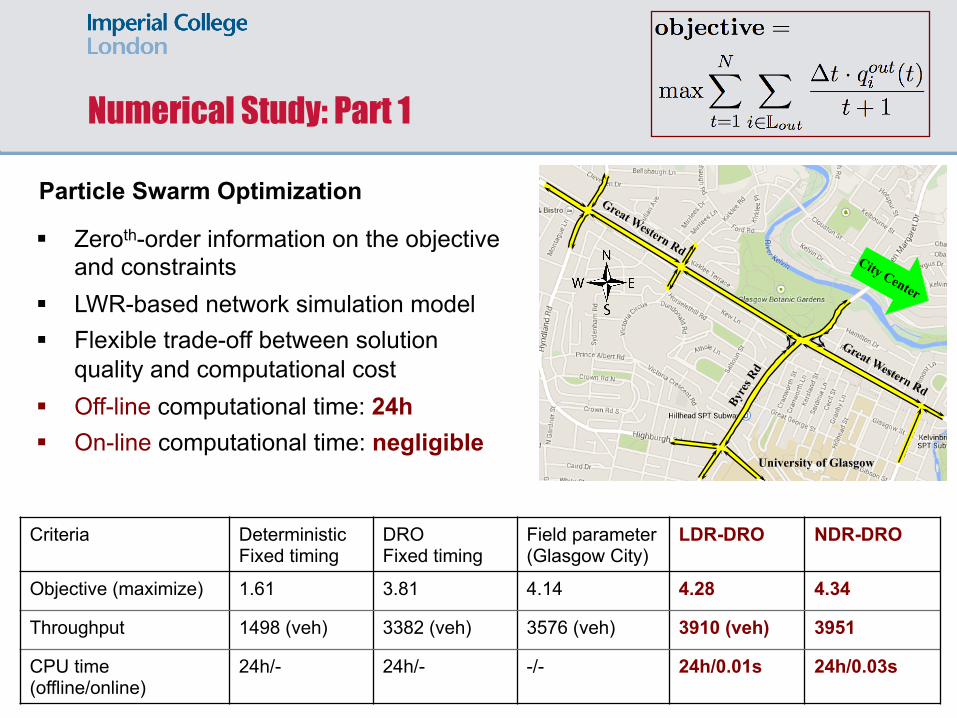
Numerical Study: Part 1
Particle Swarm Optimization Great Western Rd
Great Western Rd
Byres
Rd
City Center
University of Glasgow
§ Zeroth-order information on the objective and constraints
§ LWR-based network simulation model§ Flexible trade-off between solution
quality and computational cost§ Off-line computational time: 24h§ On-line computational time: negligible
Criteria DeterministicFixed timing
DROFixed timing
Field parameter(Glasgow City)
LDR-DRO NDR-DRO
Objective (maximize) 1.61 3.81 4.14 4.28 4.34
Throughput 1498 (veh) 3382 (veh) 3576 (veh) 3910 (veh) 3951
CPU time (offline/online)
24h/- 24h/- -/- 24h/0.01s 24h/0.03s
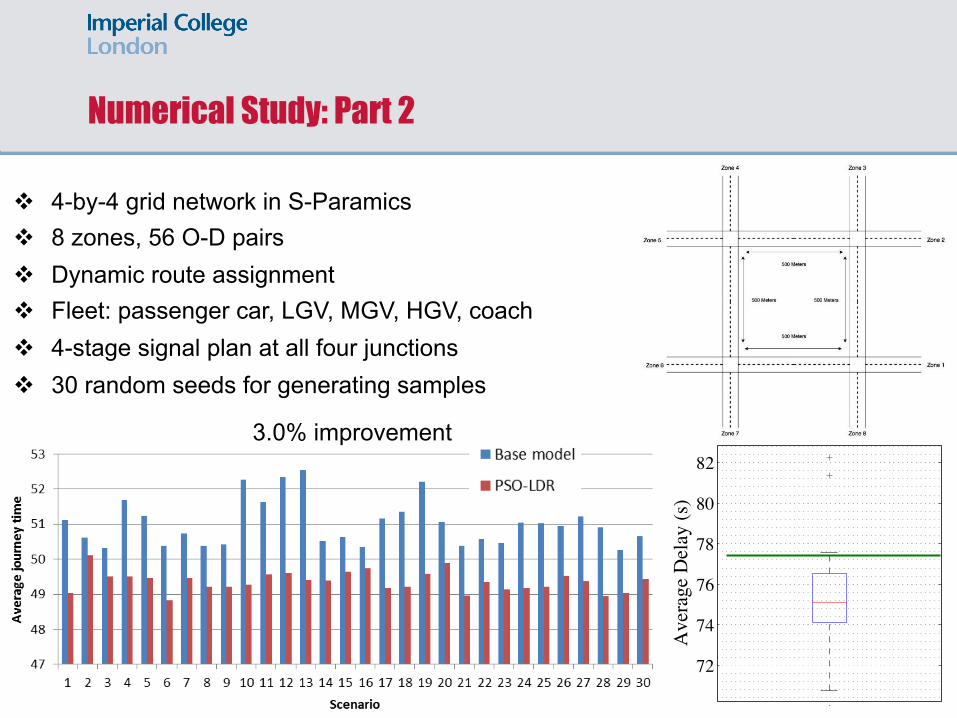
Numerical Study: Part 2
v 4-by-4 grid network in S-Paramicsv 8 zones, 56 O-D pairsv Dynamic route assignmentv Fleet: passenger car, LGV, MGV, HGV, coachv 4-stage signal plan at all four junctionsv 30 random seeds for generating samples
72
74
76
78
80
82
1
Ave
rage
Del
ay (s
)
3.0% improvement
210 215 220 225 230 235 240 245 2500
1
2
3
4
5
6
7
Average Vehicle Delay (s)
Coun
t
215
220
225
230
235
240
245
1 2
Ave
rage
Veh
icle
Del
ay (s
)
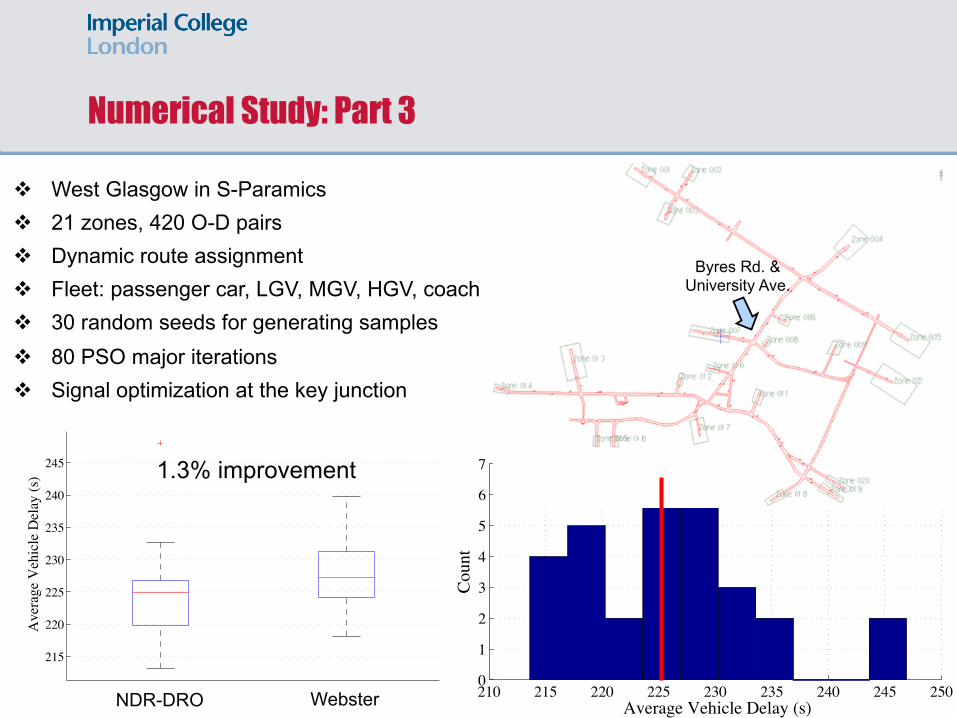
Numerical Study: Part 3
v West Glasgow in S-Paramicsv 21 zones, 420 O-D pairsv Dynamic route assignmentv Fleet: passenger car, LGV, MGV, HGV, coachv 30 random seeds for generating samplesv 80 PSO major iterationsv Signal optimization at the key junction
Byres Rd. &University Ave.
NDR-DRO Webster
1.3% improvement
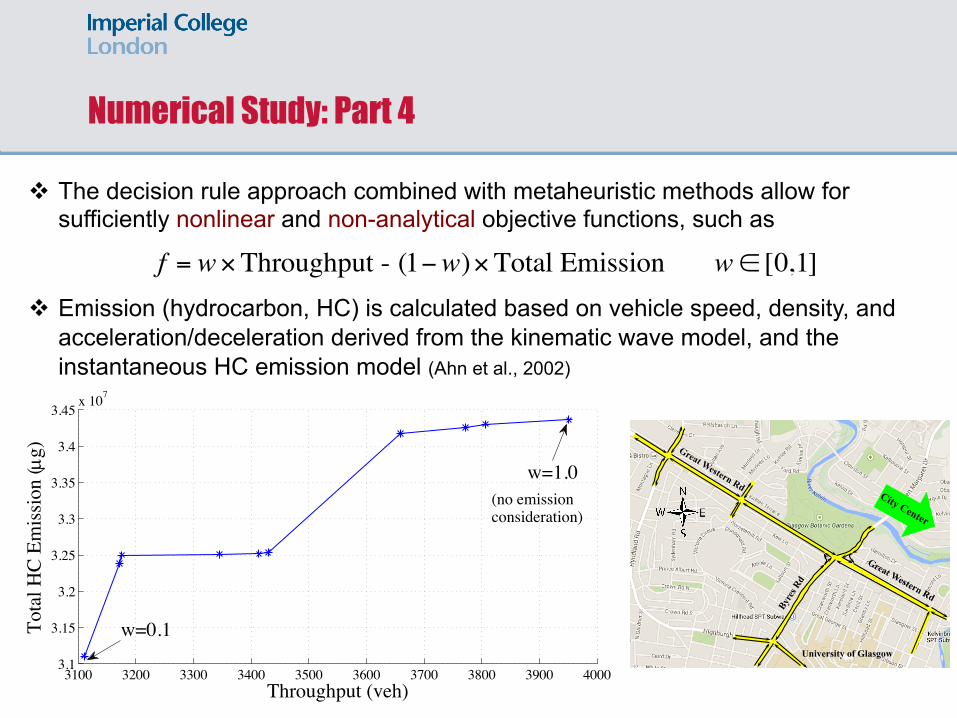
Numerical Study: Part 4
v The decision rule approach combined with metaheuristic methods allow for sufficiently nonlinear and non-analytical objective functions, such as
v Emission (hydrocarbon, HC) is calculated based on vehicle speed, density, and acceleration/deceleration derived from the kinematic wave model, and the instantaneous HC emission model (Ahn et al., 2002)
f = w×Throughput - (1−w)×Total Emission w ∈ [0,1]
Great Western Rd
Great Western Rd
Byres
Rd
City Center
University of Glasgow
3100 3200 3300 3400 3500 3600 3700 3800 3900 40003.1
3.15
3.2
3.25
3.3
3.35
3.4
3.45x 107
Throughput (veh)
Tota
l HC
Emiss
ion
(µg)
w=0.1
w=1.0(no emissionconsideration)
Thank [email protected]