projet echerche etude du systeme …brice.gonier.free.fr/rapport/projet_industriel_ipsa_2004.pdf ·...
TRANSCRIPT
PROJET INDUSTRIEL DE RECHERCHE
ETUDE DU SYSTEME YAMAHA PAS
BRICE GONIER, SALOMON NDOKI & STEEVE LETUR
SOUS LA DIRECTION DE M. SALVAN , PROFESSEUR DE MECANIQUE
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 2 / 56
1. Abstract
The bicycle has been changing since it first has been invented in the 19th century. After pneumatic tyres and gear box, shock absorbers are more and more seen on bicycles. But these evolutions and improvements of the bicycles are mostly designed to fit the most sportive use of bicycles. There is a trend in European cities for ecological locomotion and bicycle is in good position. But what makes a bicycle less attractive than other means of locomotion is the effort demanded to have some speed, assuming everybody is not an athlete.
Bicycle itself has many advantages: low cost, it is easy to use, and no driving license is required. To reduce the effort needed to drive, why not adding a motor?
Yamaha designed a complete and adaptable solution with its PAS (Power Assist System), reducing the effort needed by 50%. This solution is based on an electrical motor, driven by a calculator interpreting the data of an effort captor.
To truly understand the PAS, we need to make a mechanical study of the bicycle. What effort is needed to drive at a given speed, and with a given slope to climb, is clearly defined in such a study. These results will be used in the coming studies.
Adding the motor is not a short story. It needs to implement the gear box, to make calculations to build up the command system which will make the assistance giving the same power as the user.
After having checked that the existing PAS system correctly fitted the initial requirements, some implementations to the system are studied. First, to improve the autonomy of the battery cell, why not using the kinetic energy given by speed to charge the battery again? A system giving this ability to the PAS is studied to determine whether such a system is possible or not, at what cost and for what kind of gain.
Secondly, another study is made to try to remove the captor which gave the value of the effort made by the user. This is a complex piece so removing it would be a great gain. To only drive the motor with the speed captor, it is necessary to completely rebuild the command system, and to change the specifications, assuming there is no great change in the response to the users needs with it.
This study has detailed the Yamaha PAS and has verified that the specifications fitted the original objective.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 3 / 56
1. ABSTRACT 2
2. INTRODUCTION 5
3. ETUDE PRELIMINAIRE: L’ASSISTANCE AU PEDALAGE SUR LE VELO YAMAHA P.A.S. 7
3.1. Système d’assistance au pédalage –généralité 7
3.2. Cahier des charges – Analyse fonctionnelle du besoin 8 3.2.1. Fonctions de services........................................................................................................... 9
3.3. Le Power Assist System (P.A.S) 9 3.3.1. Principe général de fonctionnement..................................................................................... 9 3.3.2. Loi d’assistance du P.A.S. - gestion de l’assistance.......................................................... 10 3.3.3. Structure de la transmission de puissance.......................................................................... 13
4. PREMIERE PARTIE : ETUDE MECANIQUE D’UNE BICYCLETTE SANS ASSISTANCE 15
4.1. Etude mécanique Erreur ! Signet non défini. 4.1.1. Paramétrage des efforts statiques....................................................................................... 16 4.1.2. Paramétrage cinématique................................................................................................... 21 4.1.3. Point de vue global ............................................................................................................ 26
5. DEUXIEME PARTIE : ETUDE DE LA COMMANDE DU PAS 30
5.1. Processus de commande du PAS 30
5.2. Rappel du principe de fonctionnement 30
5.3. Les capteurs 31 5.3.1. Capteur de vitesse.............................................................................................................. 31 5.3.2. Capteur de couple .............................................................................................................. 31
5.4. Le calculateur 32
5.5. Moteur électrique 33
5.6. Boucle de commande 33
5.7. Analyse et exploitation des résultats 34
6. TROISIEME PARTIE : PROPOSITIONS D’AMELIORATIONS 35
6.1. Une nouvelle fonction : la recharge de la batterie sur un vélo en fonctionnement muni du P.A.S 35
6.1.1. Cahier des charges du system de recharge :....................................................................... 37
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 4 / 56
6.1.2. Choix de la batterie............................................................................................................ 38 6.1.3. La recharge de la batterie................................................................................................... 38 6.1.4. 3.1.5Mécanisme de commutation ...................................................................................... 39
6.2. Passage de commande en effort à commande en vitesse 44 6.2.1. Modification du cahier des charges ................................................................................... 44 6.2.2. Commande du moteur........................................................................................................ 44 6.2.3. Nouvelle boucle de commande.......................................................................................... 46 6.2.4. Utilisation .......................................................................................................................... 46 6.2.5. Conclusion......................................................................................................................... 46
7. CONCLUSION 46
8. ANNEXES 46
8.1. Déroulement du projet 46
8.2. Bibliographie 46

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 5 / 56
2. Introduction
A l’heure actuelle, plusieurs systèmes existent sur le marché fournissant une assistance au pédalage. Tous ces systèmes consistent en un moteur qui aide l’utilisateur dans son effort de pédalage, avec comme point commun de ne pas se révéler si encombrants qu’ils changeraient substantiellement la morphologie classique d’une bicyclette.
Ces vélos avec assistance au pédalage répondent à une demande faite de la part des usagers, qui recherchent un système transparent au niveau de l’utilisation, mais qui permette une substantielle économie dans l’effort de pédalage devant être fournit, tant sur le plat que suivant des pentes diverses. Le système est donc avant tout un moyen de confort de l’usager.
Il ne faut pas non plus négliger la législation en la matière qui limite la vitesse maximale pouvant être atteinte par le vélo à moteur. Par exemple, si une vitesse de 25 kilomètres par heure peut être atteinte avec le moteur en marche, le véhicule tombe sous le coup de la législation sur les mobylettes, beaucoup plus contraignante, avec notamment le port du casque obligatoire. Un tel classement du véhicule serait à coup sûr très pénalisant du point de vue commercial car les utilisateurs potentiels recherchent avant tout un véhicule simple d’utilisation.
On le constate, le cahier des charges d’un tel véhicule est complexe. Le système Yamaha PAS sera ainsi étudié, afin de valider les choix techniques effectués par le constructeur.
Il apparaît logique de commencer cette étude par une estimation générale des forces mises en jeu par un cycliste pour faire avancer son vélo, que ce soit sur le plat ou dans différentes situations de dénivelé. Pour ce faire, une étude mécanique du vélo et de son interaction avec le cycliste et la route est nécessaire. Cette étude permettra de dimensionner le moteur d’appoint afin qu’il puisse répondre à la demande de puissance.
Ce moteur doit, d’après le cahier des charges du Yamaha PAS, fournir 50% de l’effort nécessaire. Ainsi, après avoir calculé l’effort total nécessaire à l’avancement dans différents cas, il suffira de dimensionner le moteur pour le cas le plus défavorable.
Ensuite, afin que l’assistance soit juste ce qu’il faut quand il le faut, il est nécessaire de rajouter une commande automatique. Ainsi, l’étude portera sur le fonctionnement de la commande du Yamaha PAS, sa réponse aux différentes vitesses et pentes. Cette partie du PAS est la plus importante, car c’est elle qui définit l’utilisation qui sera faite du système. Une

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 6 / 56
mauvaise commande peut compromettre durablement les chances du PAS d’accéder au succès commercial.
Comme rien ne peut être définitivement idéal, il est judicieux d’étudier différentes améliorations ou variantes possibles pouvant simplifier l’ensemble, ou bien le rendre plus intéressant pour l’utilisateur. Deux possibilités d’évolutions ont été retenues : une option de rechargement de la batterie lors des descentes et une commande différente de celle utilisée jusqu’alors, induisant un léger remaniement du cahier des charges, mais offrant une plus grande simplicité du mécanisme.
Ces évolutions du système existant sont indépendantes chacune indépendante de l’autre. L’étude qui en sera faite restera toutefois à un stade de première approche, afin d’avoir une idée de la faisabilité des processus envisagés.

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 7 / 56
3. Etude préliminaire: l’assistance au pédalage sur Le vélo Yamaha P.A.S.
Afin de rendre le parcours du cycliste plus agréable, depuis 1997 et la mise en service du Ax-ion de MBK, les constructeurs se mobilisent pour développer et proposer des vélos a pédalage assisté. Afin de mieux appréhender ces vélos nous présenterons alors le système d’assistance au pédalage et les fonctions qu’il remplit en nous appuyant sur une analyse fonctionnelle du mécanisme d’assistance, avant d’insister plus longuement sur le Power Assist System de Yamaha, modèle sur lequel nous baserons notre étude.
3.1. Système d’assistance au pédalage –généralité
Ces systèmes sont nés de la seule volonté d’aider le cycliste dans ses déplacements.
Alors, certains motoristes et constructeurs ont proposés des ensembles techniques permettant de prendre en charge une partie de l’effort à fournir par le cycliste : le à assistance électrique est né.
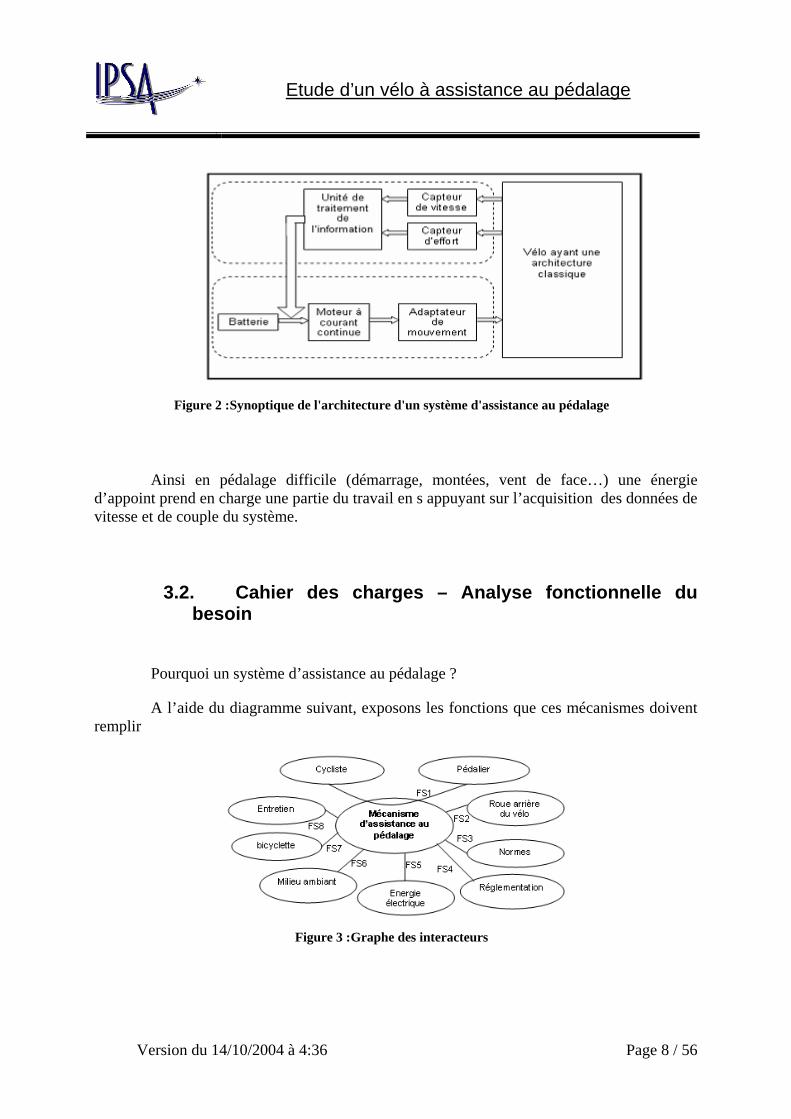
Ces systèmes sont en général des ensembles techniques qui s’adaptent sur le vélo : ils transforme l’architecture d’un vélo classique en y greffant : (cf. figure 1 et 2)
� une chaîne de contrôle et de traitement des informations (capteurs, microcontrôleurs),
� et une chaîne de transmission de puissance (batterie, moteur a courant continu, un mécanisme d’adaptation de mouvement pour assure le don d e puissance a la chaîne)
Figure 1 : Synoptique de l'architecture d'un vélo sans assistance
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 8 / 56
Figure 2 : Synoptique de l'architecture d'un système d'assistance au pédalage
Ainsi en pédalage difficile (démarrage, montées, vent de face…) une énergie d’appoint prend en charge une partie du travail en s appuyant sur l’acquisition des données de vitesse et de couple du système.
3.2. Cahier des charges – Analyse fonctionnelle du besoin
Pourquoi un système d’assistance au pédalage ?
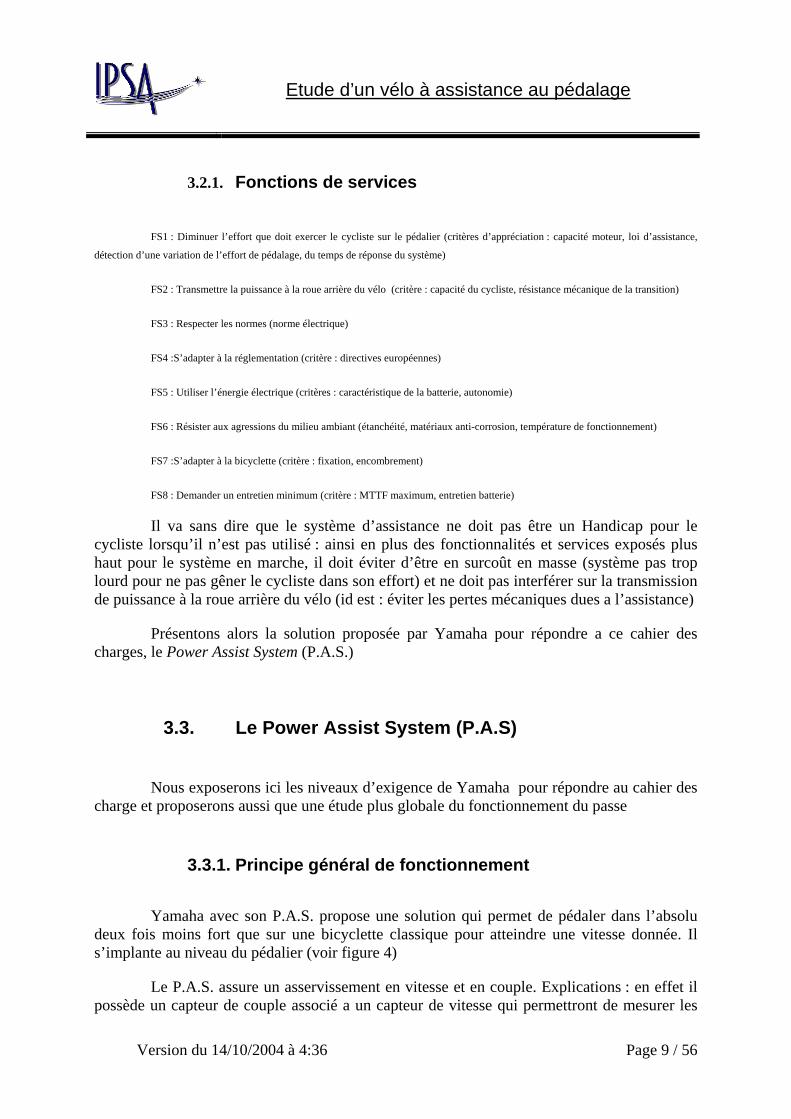
A l’aide du diagramme suivant, exposons les fonctions que ces mécanismes doivent remplir
Figure 3 : Graphe des interacteurs
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 9 / 56
3.2.1. Fonctions de services
FS1 : Diminuer l’effort que doit exercer le cycliste sur le pédalier (critères d’appréciation : capacité moteur, loi d’assistance,
détection d’une variation de l’effort de pédalage, du temps de réponse du système)
FS2 : Transmettre la puissance à la roue arrière du vélo (critère : capacité du cycliste, résistance mécanique de la transition)
FS3 : Respecter les normes (norme électrique)
FS4 :S’adapter à la réglementation (critère : directives européennes)
FS5 : Utiliser l’énergie électrique (critères : caractéristique de la batterie, autonomie)
FS6 : Résister aux agressions du milieu ambiant (étanchéité, matériaux anti-corrosion, température de fonctionnement)
FS7 :S’adapter à la bicyclette (critère : fixation, encombrement)
FS8 : Demander un entretien minimum (critère : MTTF maximum, entretien batterie)
Il va sans dire que le système d’assistance ne doit pas être un Handicap pour le cycliste lorsqu’il n’est pas utilisé : ainsi en plus des fonctionnalités et services exposés plus haut pour le système en marche, il doit éviter d’être en surcoût en masse (système pas trop lourd pour ne pas gêner le cycliste dans son effort) et ne doit pas interférer sur la transmission de puissance à la roue arrière du vélo (id est : éviter les pertes mécaniques dues a l’assistance)
Présentons alors la solution proposée par Yamaha pour répondre a ce cahier des charges, le Power Assist System (P.A.S.)
3.3. Le Power Assist System (P.A.S)
Nous exposerons ici les niveaux d’exigence de Yamaha pour répondre au cahier des charge et proposerons aussi que une étude plus globale du fonctionnement du passe
3.3.1. Principe général de fonctionnement
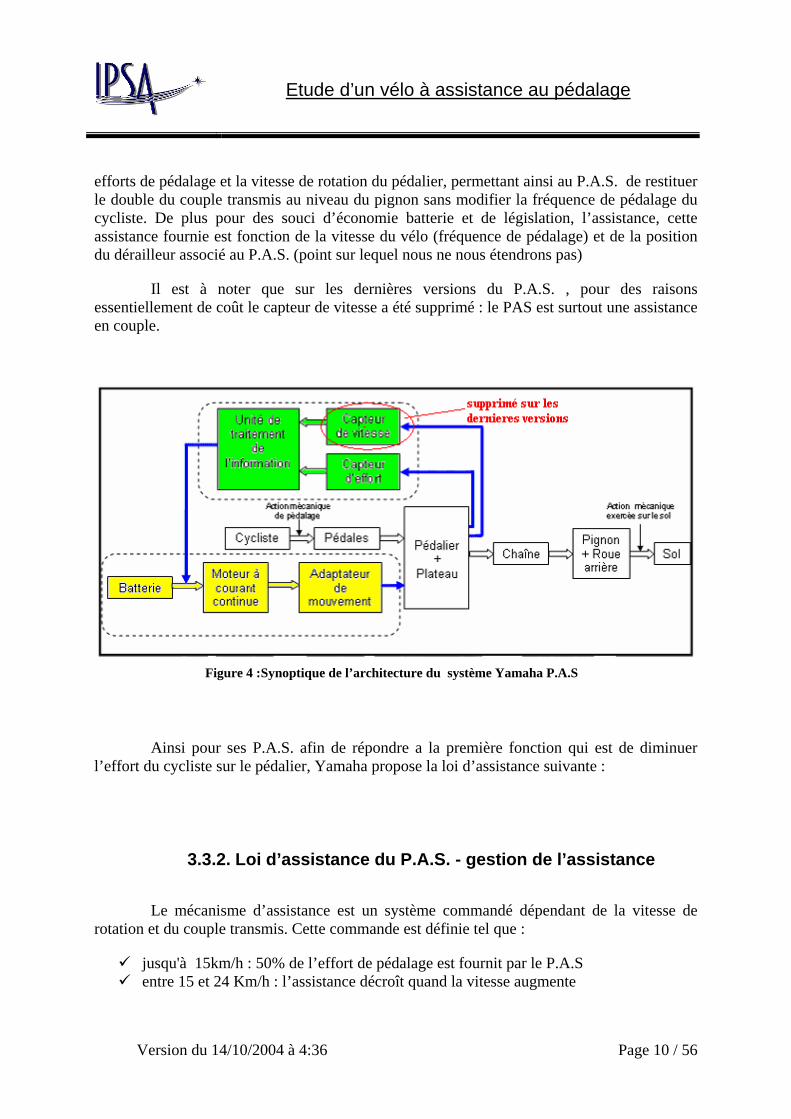
Yamaha avec son P.A.S. propose une solution qui permet de pédaler dans l’absolu deux fois moins fort que sur une bicyclette classique pour atteindre une vitesse donnée. Il s’implante au niveau du pédalier (voir figure 4)
Le P.A.S. assure un asservissement en vitesse et en couple. Explications : en effet il possède un capteur de couple associé a un capteur de vitesse qui permettront de mesurer les
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 10 / 56
efforts de pédalage et la vitesse de rotation du pédalier, permettant ainsi au P.A.S. de restituer le double du couple transmis au niveau du pignon sans modifier la fréquence de pédalage du cycliste. De plus pour des souci d’économie batterie et de législation, l’assistance, cette assistance fournie est fonction de la vitesse du vélo (fréquence de pédalage) et de la position du dérailleur associé au P.A.S. (point sur lequel nous ne nous étendrons pas)
Il est à noter que sur les dernières versions du P.A.S. , pour des raisons essentiellement de coût le capteur de vitesse a été supprimé : le PAS est surtout une assistance en couple.
Figure 4 : Synoptique de l’architecture du système Yamaha P.A.S
Ainsi pour ses P.A.S. afin de répondre a la première fonction qui est de diminuer l’effort du cycliste sur le pédalier, Yamaha propose la loi d’assistance suivante :
3.3.2. Loi d’assistance du P.A.S. - gestion de l’as sistance
Le mécanisme d’assistance est un système commandé dépendant de la vitesse de rotation et du couple transmis. Cette commande est définie tel que :
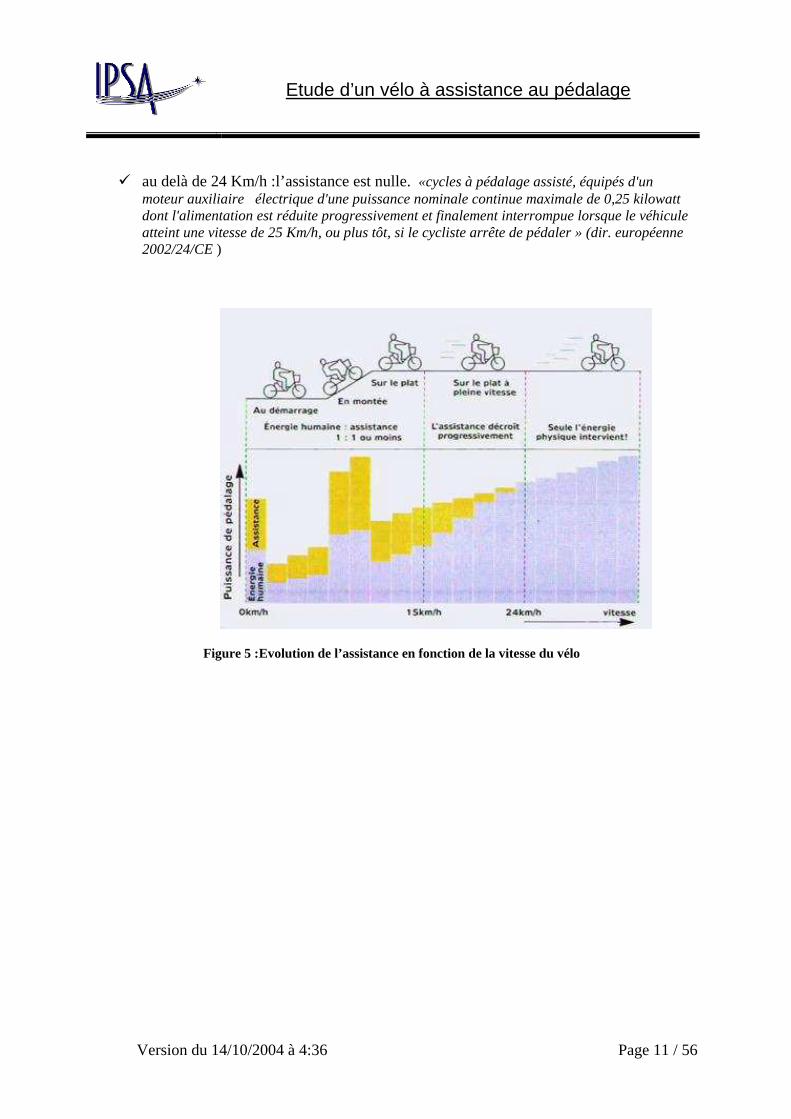
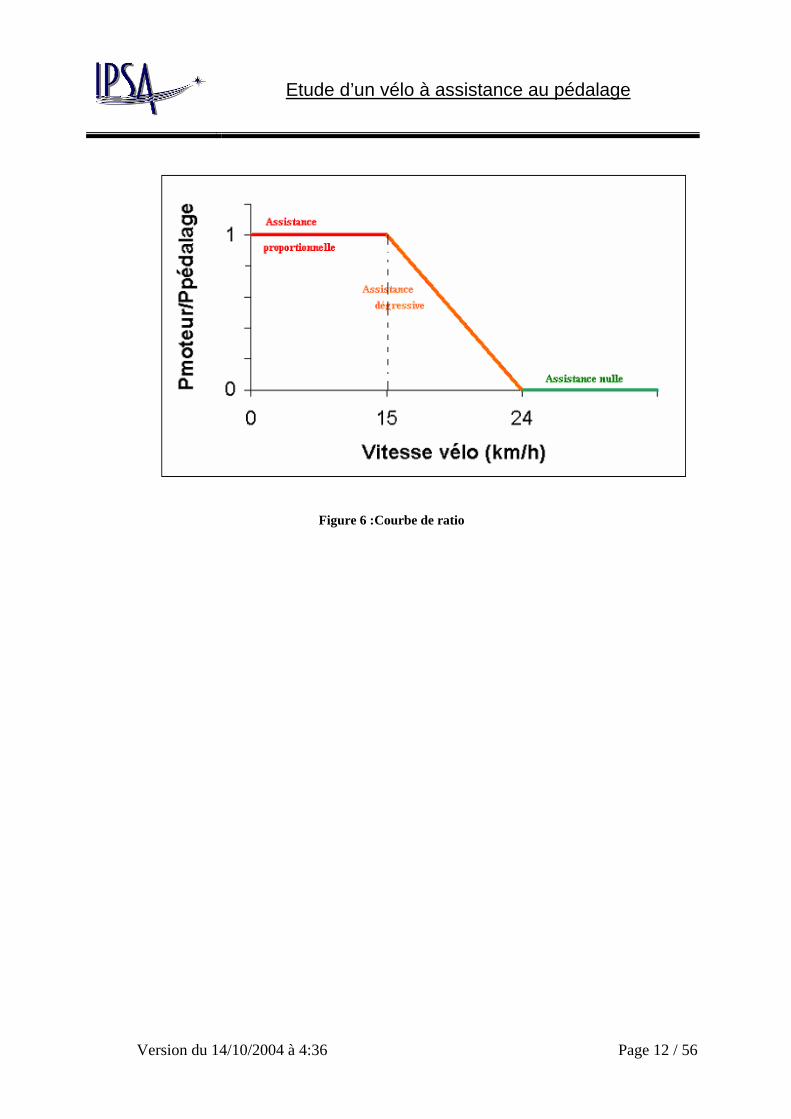
� jusqu'à 15km/h : 50% de l’effort de pédalage est fournit par le P.A.S � entre 15 et 24 Km/h : l’assistance décroît quand la vitesse augmente
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 11 / 56
� au delà de 24 Km/h :l’assistance est nulle. «cycles à pédalage assisté, équipés d'un moteur auxiliaire électrique d'une puissance nominale continue maximale de 0,25 kilowatt dont l'alimentation est réduite progressivement et finalement interrompue lorsque le véhicule atteint une vitesse de 25 Km/h, ou plus tôt, si le cycliste arrête de pédaler » (dir. européenne 2002/24/CE )
Figure 5 : Evolution de l’assistance en fonction de la vitesse du vélo
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 12 / 56
Figure 6 : Courbe de ratio

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 13 / 56
3.3.3. Structure de la transmission de puissance
Figure 7 : Schéma cinématique simplifié du P.A.S
La puissance motrice du PAS est en fait la somme (commandée par le calculateur) de la puissance musculaire du cycliste sur l’axe du pédalier et de celle de la puissance électrique du moteur sur le rotor.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 14 / 56
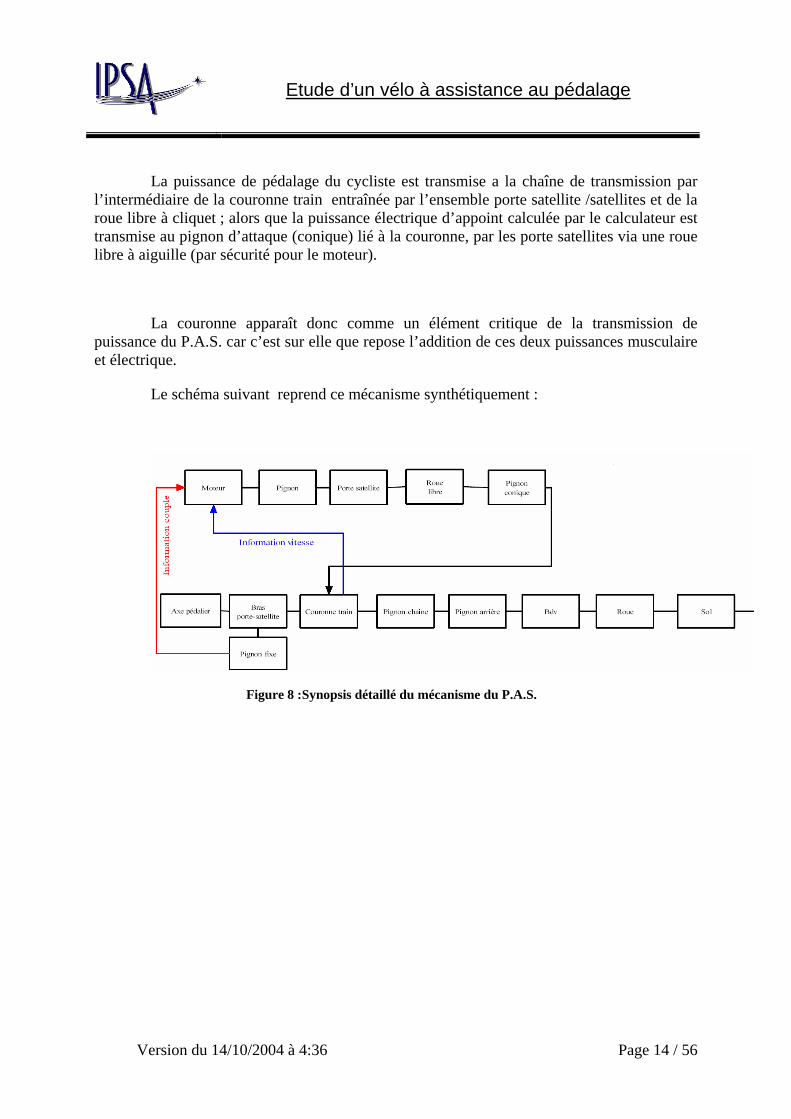
La puissance de pédalage du cycliste est transmise a la chaîne de transmission par l’intermédiaire de la couronne train entraînée par l’ensemble porte satellite /satellites et de la roue libre à cliquet ; alors que la puissance électrique d’appoint calculée par le calculateur est transmise au pignon d’attaque (conique) lié à la couronne, par les porte satellites via une roue libre à aiguille (par sécurité pour le moteur).
La couronne apparaît donc comme un élément critique de la transmission de puissance du P.A.S. car c’est sur elle que repose l’addition de ces deux puissances musculaire et électrique.
Le schéma suivant reprend ce mécanisme synthétiquement :
Figure 8 : Synopsis détaillé du mécanisme du P.A.S.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 15 / 56
4. Première Partie : Etude mécanique d’une bicyclette sans assistance
Le système d’assistance au pédalage est un système dont le but est d’ajouter une puissance d’origine électrique à la puissance fournie par le pédalage. Toutefois nous devons impérativement souligner que ce système ne confère nullement au vélo pour lequel il doit être adapté le titre de vélo électrique.
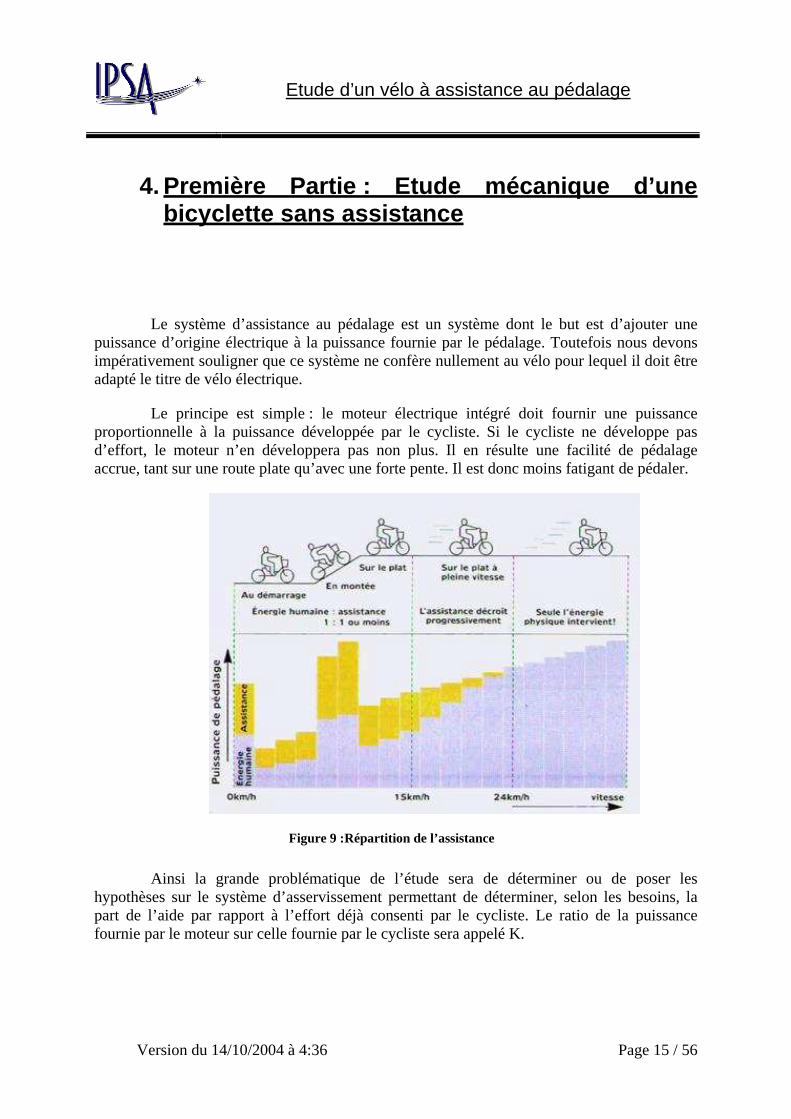
Le principe est simple : le moteur électrique intégré doit fournir une puissance proportionnelle à la puissance développée par le cycliste. Si le cycliste ne développe pas d’effort, le moteur n’en développera pas non plus. Il en résulte une facilité de pédalage accrue, tant sur une route plate qu’avec une forte pente. Il est donc moins fatigant de pédaler.
Figure 9 : Répartition de l’assistance
Ainsi la grande problématique de l’étude sera de déterminer ou de poser les hypothèses sur le système d’asservissement permettant de déterminer, selon les besoins, la part de l’aide par rapport à l’effort déjà consenti par le cycliste. Le ratio de la puissance fournie par le moteur sur celle fournie par le cycliste sera appelé K.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 16 / 56
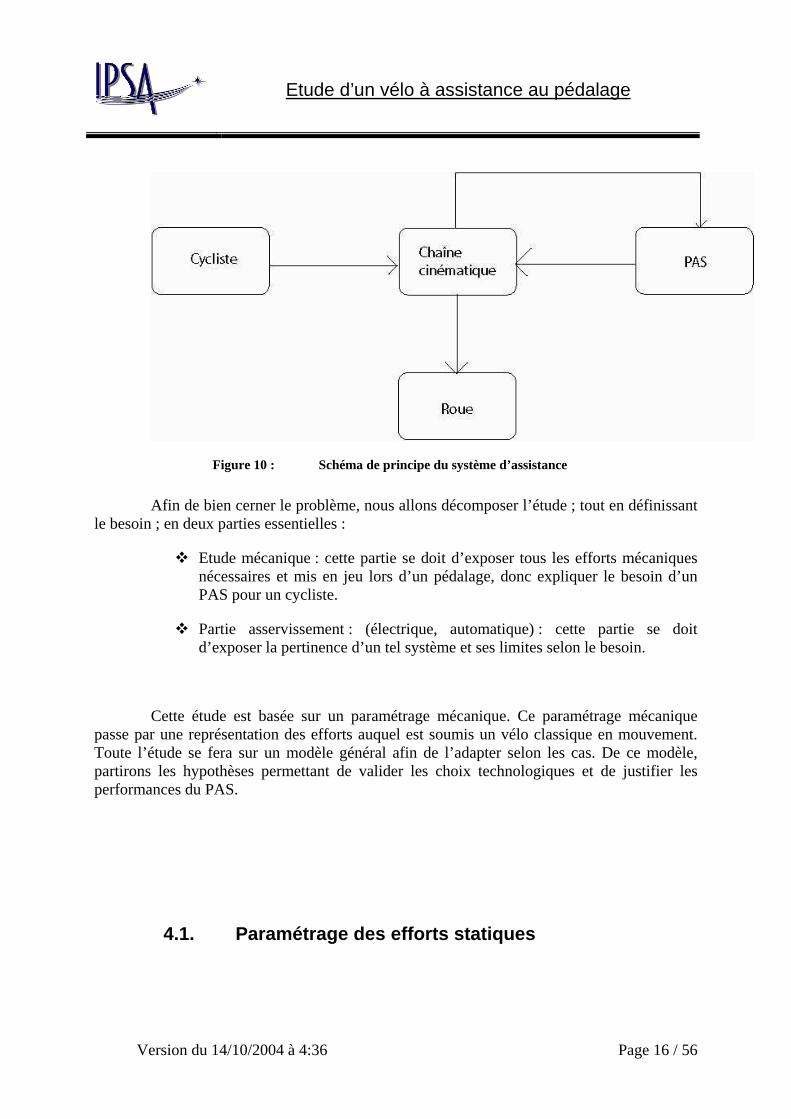
Figure 10 : Schéma de principe du système d’assistance
Afin de bien cerner le problème, nous allons décomposer l’étude ; tout en définissant le besoin ; en deux parties essentielles :
� Etude mécanique : cette partie se doit d’exposer tous les efforts mécaniques nécessaires et mis en jeu lors d’un pédalage, donc expliquer le besoin d’un PAS pour un cycliste.
� Partie asservissement : (électrique, automatique) : cette partie se doit d’exposer la pertinence d’un tel système et ses limites selon le besoin.
Cette étude est basée sur un paramétrage mécanique. Ce paramétrage mécanique passe par une représentation des efforts auquel est soumis un vélo classique en mouvement. Toute l’étude se fera sur un modèle général afin de l’adapter selon les cas. De ce modèle, partirons les hypothèses permettant de valider les choix technologiques et de justifier les performances du PAS.
4.1. Paramétrage des efforts statiques

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 17 / 56
Plaçons-nous dans le cas d’un vélo se déplaçant sur une route faisant une pente γ avec l’horizontale (en pourcentage). Nous supposerons que le cycliste se déplace à une vitesse V (m/s) et que le vélo n’est soumis à aucun effort dû à une rafale de vent.
Figure 11 : Paramétrage du vélo
Une approche énergétique simpliste devrait nous permettre de déterminer la puissance nécessaire devant être fournie par un cycliste afin de déplacer un vélo de masse m (masse incluant la masse propre du système vélo et la masse du cycliste).
∑∑ +=∆intffc WWE
ext
En partant d’une vitesse nulle, ce qui est généralement le cas :
∑∑ +=∆=intffcc WWEE
extf

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 18 / 56
En s’intéressant aux points particuliers que sont les points de contact A et B puis le centre de gravité G, on s’aperçoit très vite que l’énergie cinétique du système vélo + cycliste est la somme des énergies des deux roues, plus celle de la structure. Or la structure, donc le centre de gravité G, se déplace à une vitesse
( ) ( )txdt
dtV aa =
Autant pour les points A et B.
Ainsi l’énergie linéaire serait :
( ) ( ) ∑==n
iilinéaire mmoùGmVE 2
2
1
Avec mi masse de chaque sous-système.
Or les roues avant et arrière étant animées d’une vitesse rotative à l’instant considéré, il s’avère que :
( )2
22
11 22
1
2
1 θθ && JJE rotative +=
où :
� J1 et J2 sont les moments d’inertie d’axe z relative aux roues avant et arrière
� θ1 et θ2 sont les angles orientés par rapport à l’horizontale des roues avant et arrière.
Alors
( )
( )
( )22
211
22
211
2)()(
2
2
2
1
)(
2
1
2
1
2
1
θθ
θθ
&&&
&
&&
JJxmE
xtxdt
dGVposons
JJGmVEEE
acf
aa
rotativeclinéaireccf
++=
==
++=+=

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 19 / 56
Donc la puissance que doit fournir le cycliste est telle que :
( ) ( )( ) 22
22
12
11
22
2111
22
22
1)(
θθθθ
θθ
&&&&&&&&&
&&&
JJxxmWP
JJxmdt
dE
dt
dWP
aa
acf
++=
++==
Les moments d’inertie étant des fonctions linéaires de la masse, on s’aperçoit très vite, au vu de cette expression que la puissance est une fonction croissante de la masse. Donc plus la masse est importante, plus la puissance à fournir devra être importante.
En fait, cette approche n’est pas très explicite car toute la démonstration se base sur une puissance nécessaire, autrement dit, la puissance perdue par un cycliste. Donc on peut parler en terme de Kcal par unité de temps. Cette façon d’exposer la conclusion est intéressante pour des sportifs de haut niveau ou pour des personnes ayant des soucis médicaux et dont la perte de calories reste avant tout une priorité.
Plaçons-nous maintenant dans le contexte d’un vélo de loisir, c'est-à-dire le fait d’utiliser le vélo comme un moyen de transport agréable et non un sport. Afin de détailler cette hypothèse, nous allons ainsi exploiter ces résultats afin qu’ils soient plus parlants et plus explicites. Nous avons précédemment montré que :
∑∑ +=intffcf WWE
ext
Intéressons-nous maintenant au travail des forces internes et externes auxquelles est soumis le vélo.
L’ensemble vélo est soumis à la force aérodynamique, donc au déplacement (Fa) à la force gravitationnelle opposée à la réaction du sol, dont le contact est supposé pour l’instant ponctuel.
21 RRFPF aext +++=∑
Le calcul du moment des forces externes par rapport à l’origine O des déplacements montre que :
OBROAROCFOGPM aOfext∧+∧+∧+∧=∑ 21

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 20 / 56
Ce qui conduit dans le repère aérodynamique (O, xa, ya, za) et suivant aOz
( )
cyFhmgM
soit
cyFxRxRhxmgM
af
aBAf
Oext
Oext
++=
++−−−=
∑
∑
γ
γγ
sin
:
sincos22
Où c est le couple de traction de la roue arrière.
Supposons que les distances h et q sont bien choisies de sorte que, le centrage avec le moment C ne crée pas un basculement pour une pente donnée. Ainsi, lors d’un déplacement x l’énergie déplacée est :
( )
=
=
++=
+=
++=+
∑∑
∑∑
1
2
1
2
1:
sin
sin
int
int
ξθρ
γ
γ
c
CxSVFOr
cdt
dxmgxFP
WWdt
dP
cxmgxFWW
a
a
ff
aff
ext
ext
&&
Avec ξ k : constante de torsion
Donc suivant l’axe x4,
( )213
21
222211121
22
sin2
1
sin2
1
:
sin2
1
JJVmgSVVdt
dmV
si
xmgxSVJJxxmPPP
Ainsi
kxmgxSVP
aa
+−=++
=
+−−=++⇔==
+−−=
θθθξγρ
θθ
θξγρθθθθ
θγρ
&&&&
&&&&&&&&&&&&
&&&
Au regard de ce résultat, on se rend bien compte que l’effort musculaire nécessaire pour donner une impulsion dθ doit être très important. Le PAS permettra de réduire notablement cet effort à fournir.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 21 / 56
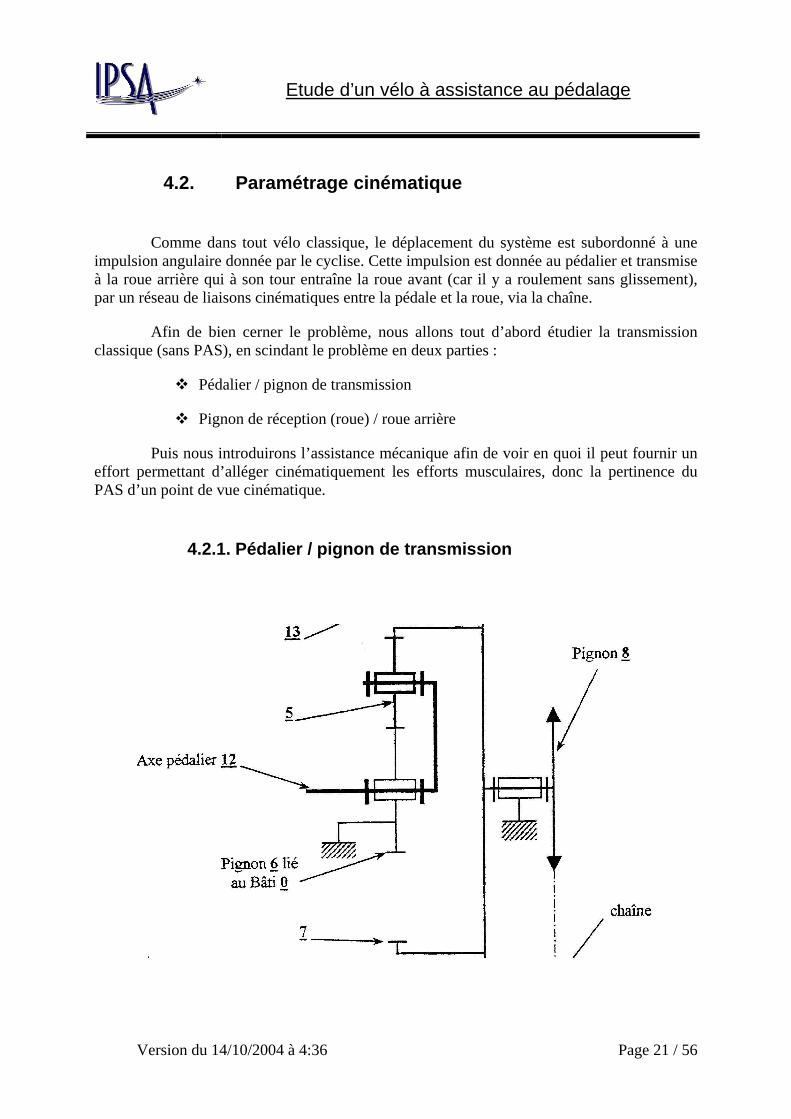
4.2. Paramétrage cinématique
Comme dans tout vélo classique, le déplacement du système est subordonné à une impulsion angulaire donnée par le cyclise. Cette impulsion est donnée au pédalier et transmise à la roue arrière qui à son tour entraîne la roue avant (car il y a roulement sans glissement), par un réseau de liaisons cinématiques entre la pédale et la roue, via la chaîne.
Afin de bien cerner le problème, nous allons tout d’abord étudier la transmission classique (sans PAS), en scindant le problème en deux parties :
� Pédalier / pignon de transmission
� Pignon de réception (roue) / roue arrière
Puis nous introduirons l’assistance mécanique afin de voir en quoi il peut fournir un effort permettant d’alléger cinématiquement les efforts musculaires, donc la pertinence du PAS d’un point de vue cinématique.
4.2.1. Pédalier / pignon de transmission

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 22 / 56
Ainsi, le pédalier est repéré par rapport au bâti par :
( )αuOA.=Γ
Le grand rayon de transmission entre la pédale et le pignon de transmission par
)(.)(. βα uABuOA
ABOAOBR
+=
+==
Sachant que la vitesse est la dérivée du vecteur position par unité de temps, donc la vitesse du point B par rapport au repère (O, x, y, z) est telle que :
( )( )
( ) ( )[ ] ( ) ( )αββαββα
ββααπ
ππ
uABuABOA
uABuAO
Rdt
dzyxOBV
sin.cos.
..
,,,2
2
22
&&&
&&
−++=
+++=
=∈
La vitesse du point B appartenant à 3 par rapport au repère (O, x, y, z) est telle que
( )( ) ( ) yRzyxOBV αβ && +=∈ ,,,3
Donc le rapport de réduction, fonction du nombre de dents entre l’entrée de la puissance musculaire et le pignon de transmission :
7
76
01
031
Z
ZZ
K
+=
+==α
βαωω
&
&&
Le pignon de transmission 3 transmet le mouvement reçu (vitesse de rotation) au pignon de réception liée à la roue arrière par un système de chaîne.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 23 / 56
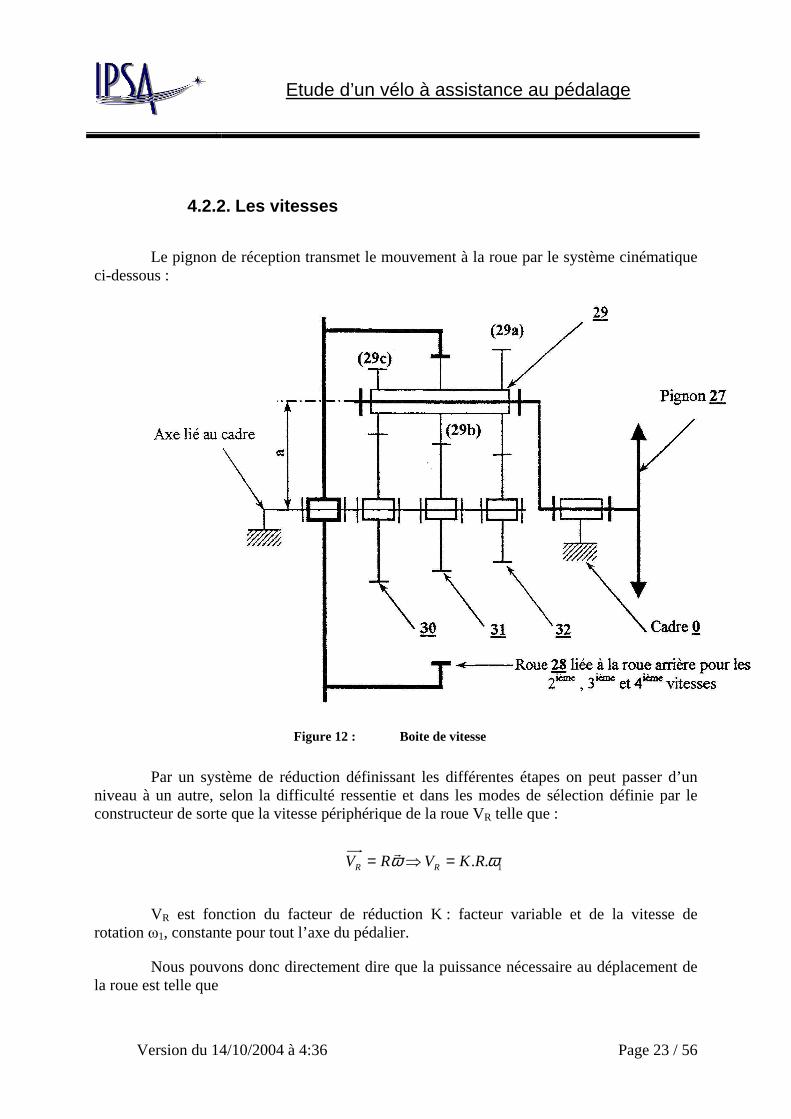
4.2.2. Les vitesses
Le pignon de réception transmet le mouvement à la roue par le système cinématique ci-dessous :
Figure 12 : Boite de vitesse
Par un système de réduction définissant les différentes étapes on peut passer d’un niveau à un autre, selon la difficulté ressentie et dans les modes de sélection définie par le constructeur de sorte que la vitesse périphérique de la roue VR telle que :
1.. ωω RKVRV RR =⇒=r
VR est fonction du facteur de réduction K : facteur variable et de la vitesse de rotation ω1, constante pour tout l’axe du pédalier.
Nous pouvons donc directement dire que la puissance nécessaire au déplacement de la roue est telle que
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 24 / 56
ωcPR =
Où c est le couple transmis au pignon est directement lié et la fonction de la puissance utile développée dans la partie Etude statique. Donc en faisant un lien cause à effet, directement lié à l’effort musculaire.
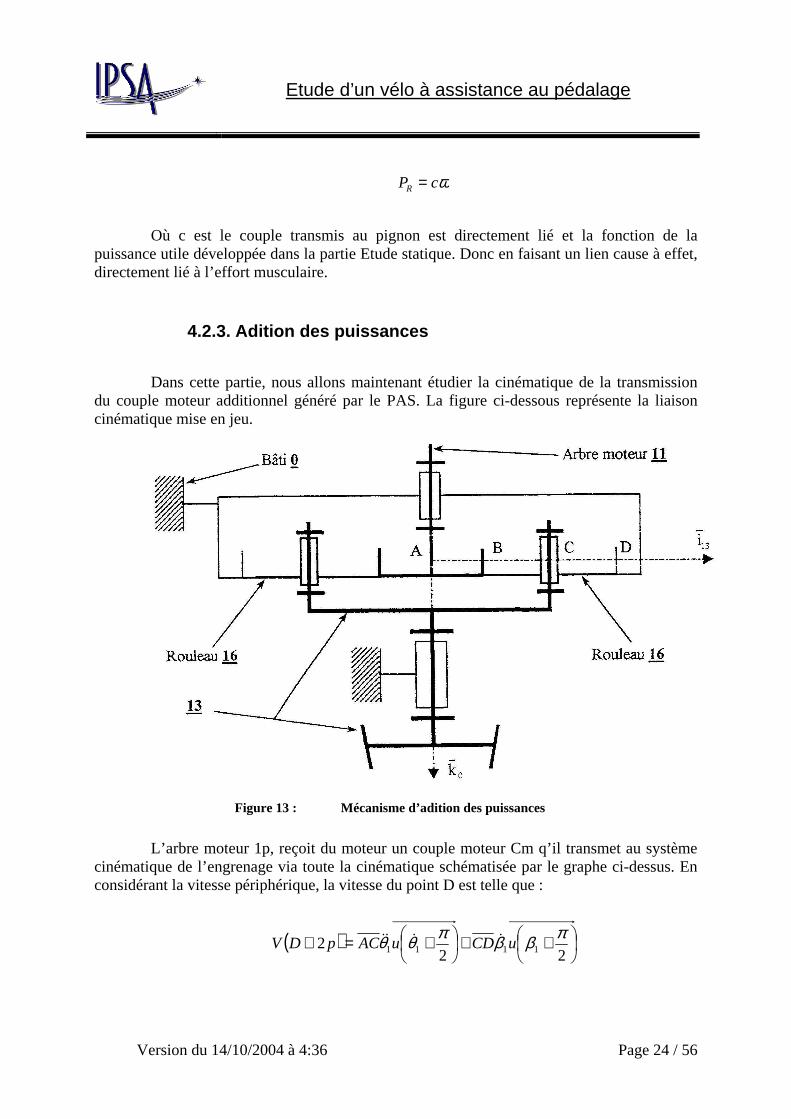
4.2.3. Adition des puissances
Dans cette partie, nous allons maintenant étudier la cinématique de la transmission du couple moteur additionnel généré par le PAS. La figure ci-dessous représente la liaison cinématique mise en jeu.
Figure 13 : Mécanisme d’adition des puissances
L’arbre moteur 1p, reçoit du moteur un couple moteur Cm q’il transmet au système cinématique de l’engrenage via toute la cinématique schématisée par le graphe ci-dessus. En considérant la vitesse périphérique, la vitesse du point D est telle que :
( )
++
+=∈22
2 1111
πββπθθ uCDuACpDV &&&&

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 25 / 56
Entre les engrenages nous prenons en compte le fait que le roulement se fait sans glissement, ce qui fait que le rapport de transmission entre l’arbre de l’engrenage lié à la cinématique de la pédale 3p et la pièce 2p est tel que :
CD
CDAB 2
1
1 +−=θβ&
&
Puis entre la pièce 2p et l’arbre moteur 1p on a :
( ) 1++=AB
CDηθθα&
&
où η est une constante telle que : θηβ && =
Ainsi la vitesse de 3p par rapport à 1p est :
( ) 12
11
++=
AB
CDηθ&
Sachant la vitesse au niveau de l’engrenage est :
PR RVP 1θ&=
En revenant au paragraphe transmission pédalier / pignon de transmission nous avons démontré que :
( ) 11
1
++=
AB
CDRV PRP
η
α&

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 26 / 56
4.2.4. Point de vue global
On a donc le schéma global des liaisons cinématiques :
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 27 / 56
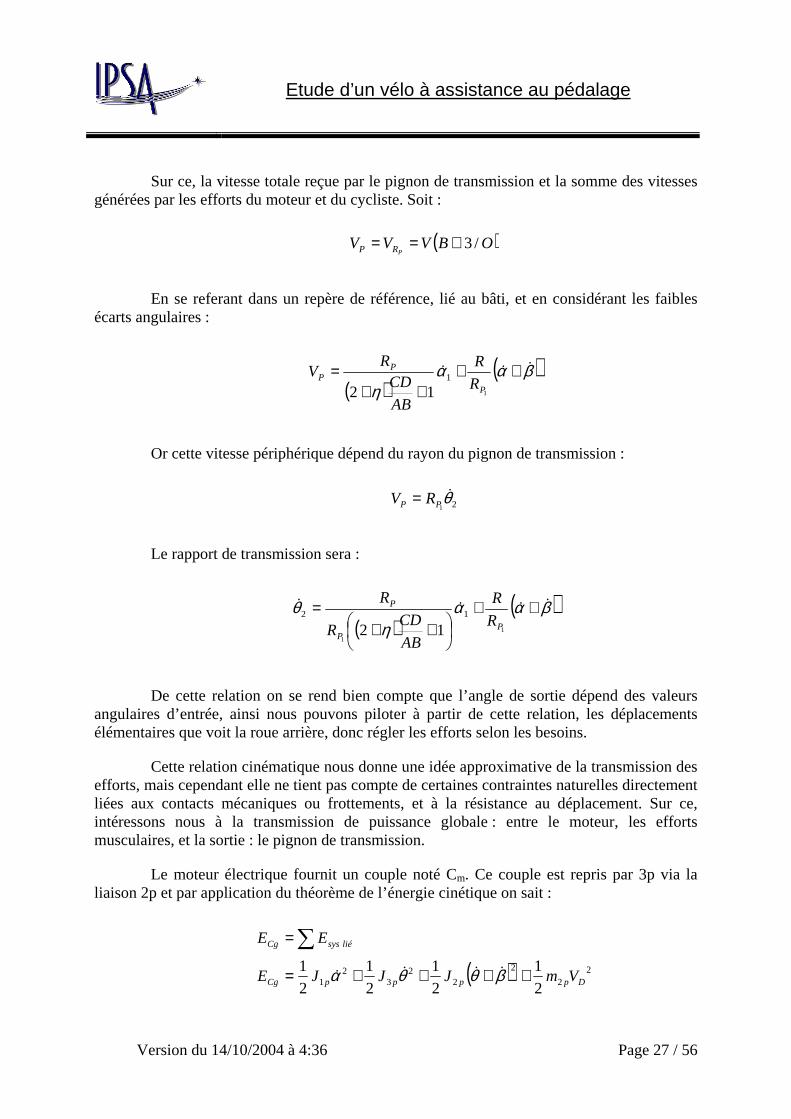
Sur ce, la vitesse totale reçue par le pignon de transmission et la somme des vitesses générées par les efforts du moteur et du cycliste. Soit :
( )OBVVVPRP /3∈==
En se referant dans un repère de référence, lié au bâti, et en considérant les faibles écarts angulaires :
( )( )βαα
η&&& ++
++=
1
1
12 P
PP R
R
AB
CDR
V
Or cette vitesse périphérique dépend du rayon du pignon de transmission :
21θ&PP RV =
Le rapport de transmission sera :
( )( )βαα
ηθ &&&& ++
++=
1
1
12
12 PP
P
R
R
AB
CDR
R
De cette relation on se rend bien compte que l’angle de sortie dépend des valeurs angulaires d’entrée, ainsi nous pouvons piloter à partir de cette relation, les déplacements élémentaires que voit la roue arrière, donc régler les efforts selon les besoins.
Cette relation cinématique nous donne une idée approximative de la transmission des efforts, mais cependant elle ne tient pas compte de certaines contraintes naturelles directement liées aux contacts mécaniques ou frottements, et à la résistance au déplacement. Sur ce, intéressons nous à la transmission de puissance globale : entre le moteur, les efforts musculaires, et la sortie : le pignon de transmission.
Le moteur électrique fournit un couple noté Cm. Ce couple est repris par 3p via la liaison 2p et par application du théorème de l’énergie cinétique on sait :
( ) 22
2
22
32
1 2
1
2
1
2
1
2
1DppppCg
liésysCg
VmJJJE
EE
++++=
=∑
βθθα &&&&

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 28 / 56
Or il y a 4 pignons conique en plus par rapport au moment qu’il reçoit, le pignon 3p oppose une résistance au déplacement soit, en couple Cr ; ainsi, la puissance sortie : puissance utile qui est couplée à la cinématique d’entraînement du pignon de transmission et
θα && rm CCP −=
De par sa définition :
( ) ( )( )θθββθθθθαα &&&&&&&&&&&&&&&2
331 4 CDABmJJJEJt
J
EJt
JP
cppppc
c
+++++=
=
Donc le couple moteur généré par le moteur du PAS est tel que :
( ) ( )( )( )αη &&21
22
21
223
21111 14 KCDABKKJJKJCKC ppprm ++++++=
Au niveau des points de contact B et D, les frottements générés sont tels que : par le principe de contact mécanique, pour un contact sans glissement.
( ) ( )
( ) ( )BâtipDBâtipD
ppBppB
NfT
et
NfT
→→
→→
<
<
222
21121
Avec f le coefficient de frottement par application du moment dynamique :
ϕ2
2
dt
dJM
extf =∑
( )
( ) ( ) ( )βθ
α
&&&&
&&
+=+−
=−
→→
→
pppBBâtipD
pppBm
JTDCTDCDen
JTABCBen
2122
121
..:
.:
Alors pour que le système soit pilotable par le moteur, il faut que les efforts normaux occasionnés soit :

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 29 / 56
( ) ( )( )( )( )
( ) ( )( )( )( ) ( )( )αηαη
αη
&&&&
&&
21
22
22
21
22
2131
21
22
21
22
2131
1414.4
1
144
1
KABJDCABmKJKJCKDCCDfAB
ND
KDCABmKJKJCKfAB
NB
pppprD
ppprB
+++++++>⇔
+++++>⇔
Au vu de ces résultats, il est évident de constater que les efforts et contraintes de frottement, sont proportionnels à angle α et croissant avec celui-ci en plus, le couple moteur Cm l’ait aussi. Toute la délicatesse consiste à démarrer la PAS sans perturber l’entraînement musculaire. Ainsi on va pouvoir régler α de sorte qu’il soit le plus faible possible et que son influence soit minime dans l’expression du couple moteur.
En aparté, récemment à l’étude dynamique dans cette partie, nous montrons que, la puissance musculaire fournie par le cycliste est telle que :
( ) px CVmgCSVcyclisteP +−−= γρ sin2
1 3
Où Cp est le couple de pédalage
Plus généralement nous venons de montrer que la puissance nécessaire au déplacement dx est en définitive égale à la somme des puissances mises en jeu :
( ) ( ) ( )
( )
( ) ( )
( )
( ) VmgCSVCJJKmaRCC
VmgCSVCCCJJmaV
JJmaVPOr
VmgCSVCCCP
PPP
xrpm
xprm
necessaire
xprmnecessaire
moteurcyclistenecessaire
γρθθ
γρθθαθθ
θθ
γρθθα
sin2
1
sin2
1
sin2
1
321
3221
21
32
+++++=+⇔
−−+−=++⇔
++=
−−+−=⇔
+=
&&
&&&&&&
&&&
&&&
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 30 / 56
5. Deuxième Partie : Etude de la commande du PAS
Cette étude consiste à expliciter toute la commande électrique et automatique du PAS, en utilisant faisant appel à des notions de mécanique, mais aussi d’électricité. Ainsi, dans toute cette partie, nous ferons appel à certains points de l’étude mécanique et cinématique effectuée précédemment (cf. partie 1). Les démonstrations ne seront donc pas refaites, seuls les liens seront explicités.
5.1. Processus de commande du PAS
Comme tout problème d’automatique, cette étude consiste à faire un bilan global entre la sortie du processus, caractérisée par la vitesse de rotation du moteur électrique, et la mesure des deux entrées : le couple mécanique fourni par le cycliste (et mesuré par un capteur adéquat), et la vitesse de rotation du pédalier.
5.2. Rappel du principe de fonctionnement
Comme cela a été explicité dans l’étude mécanique, le PAS comporte une transmission de puissance composée de deux entrées et une seule sortie. Les deux entrées de puissance sont : la puissance fournie par le cycliste à travers le pédalier, et la puissance fournie par le moteur électrique.
Le couple moteur généré par le moteur électrique est ajouté au couple fourni par le cycliste par l’intermédiaire d’un train à planétaire. De ce fait, toute la difficulté est de gérer la consigne du processus de manière à ce qu’elle soit fonction de la puissance fournie par le cycliste :
Pmoteur élec=k.Pcycliste
Avec k le facteur de gain défini dans le cahier des charges.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 31 / 56
5.3. Les capteurs
L’entrée du système est, on l’a vu, composée de :
� L’énergie musculaire, soit un couple de pédalage
� La vitesse de rotation du pédalier
Afin d’être pris en compte et d’être intégrées dans la boucle de commande, les contraintes sont mesurées par le biais de capteurs.
5.3.1. Capteur de vitesse
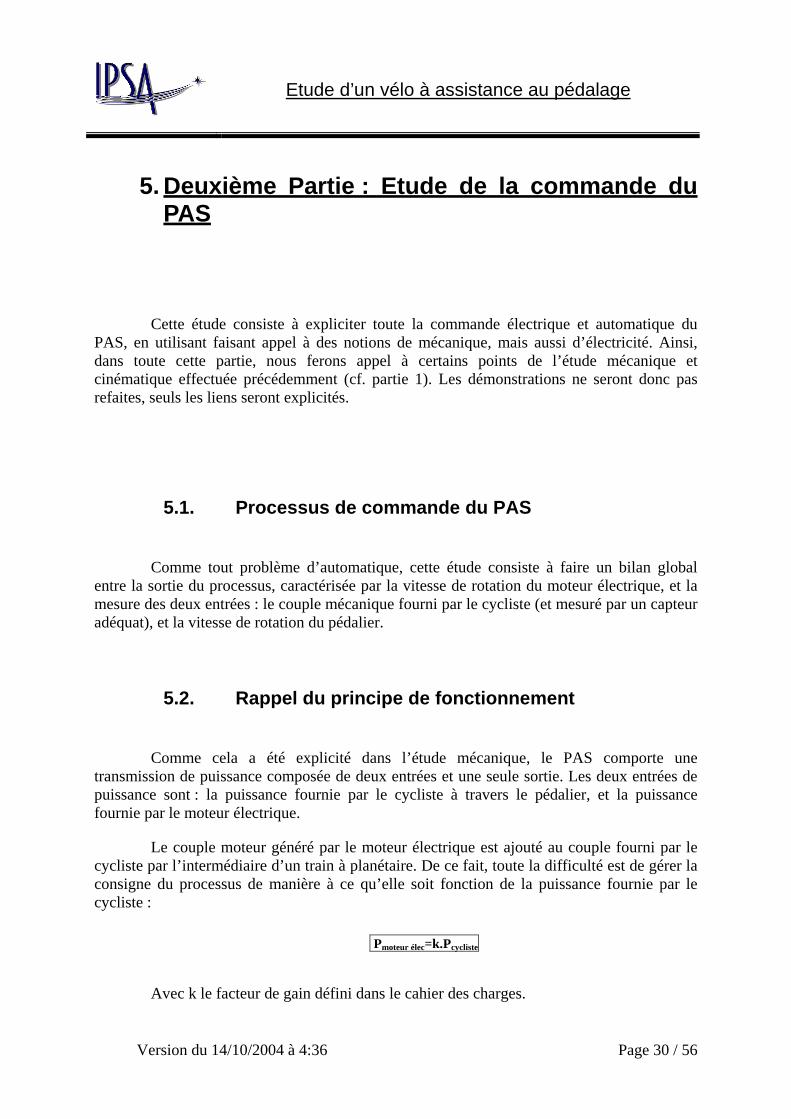
La mesure de la vitesse est effectuée sur une couronne dentée solidaire du pédalier. Un détecteur constitué d’une bobine réagit au passage des dents métalliques auprès de lui en générant des impulsions électriques. La fréquence de ces impulsions renseigne sur la période de rotation du pédalier car on connaît le nombre de dents implantées sur la couronne
5.3.2. Capteur de couple
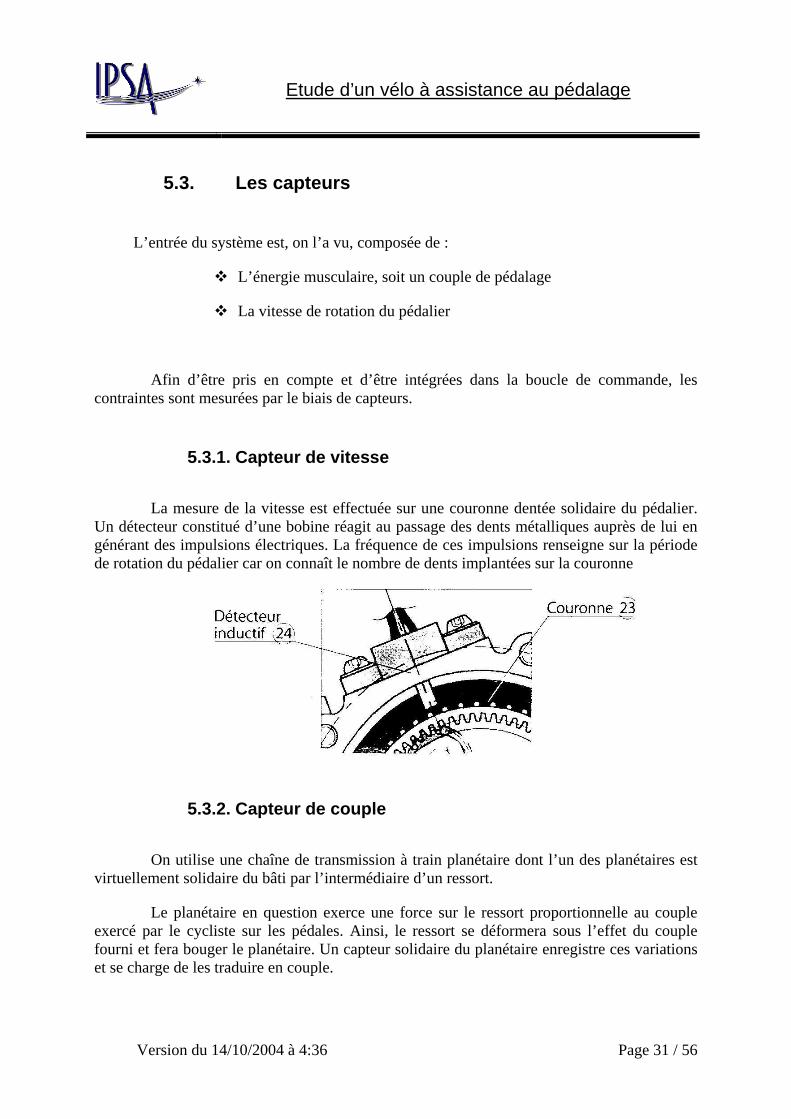
On utilise une chaîne de transmission à train planétaire dont l’un des planétaires est virtuellement solidaire du bâti par l’intermédiaire d’un ressort.
Le planétaire en question exerce une force sur le ressort proportionnelle au couple exercé par le cycliste sur les pédales. Ainsi, le ressort se déformera sous l’effet du couple fourni et fera bouger le planétaire. Un capteur solidaire du planétaire enregistre ces variations et se charge de les traduire en couple.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 32 / 56
Le planétaire ne bouge toutefois pas assez pour perturber le fonctionnement du système d’adition des couples électrique et du cycliste : la raideur du ressort a été choisie de manière à induire un faible déplacement.
5.4. Le calculateur
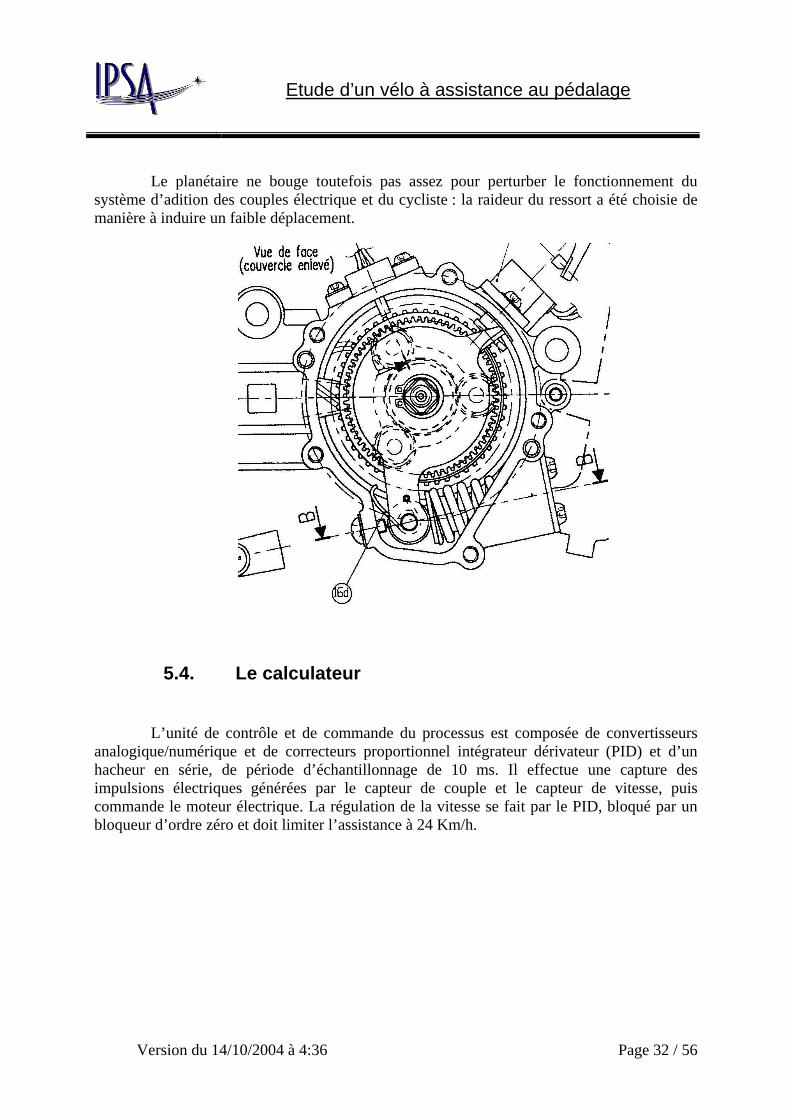
L’unité de contrôle et de commande du processus est composée de convertisseurs analogique/numérique et de correcteurs proportionnel intégrateur dérivateur (PID) et d’un hacheur en série, de période d’échantillonnage de 10 ms. Il effectue une capture des impulsions électriques générées par le capteur de couple et le capteur de vitesse, puis commande le moteur électrique. La régulation de la vitesse se fait par le PID, bloqué par un bloqueur d’ordre zéro et doit limiter l’assistance à 24 Km/h.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 33 / 56
5.5. Moteur électrique
Le moteur utilisé est un moteur électrique à courant continu de 235W dont le principe de fonctionnement ne sera pas détaillé ici car il sort du cadre de cette analyse.
5.6. Boucle de commande
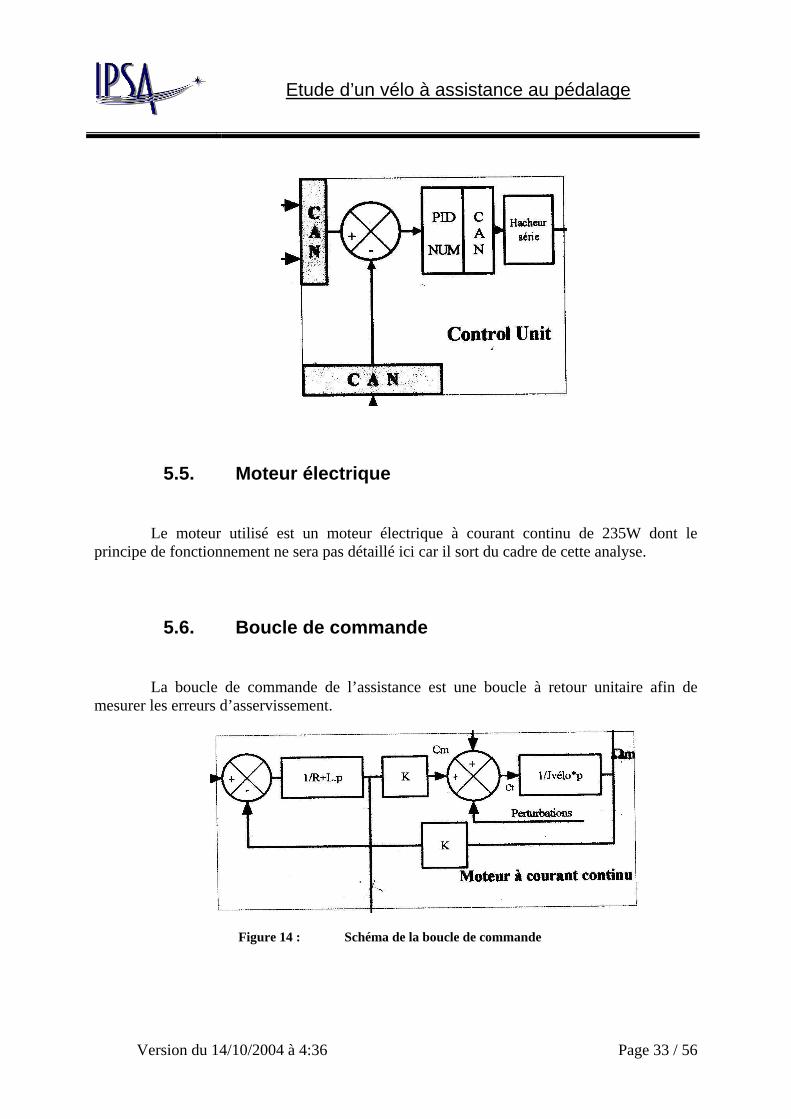
La boucle de commande de l’assistance est une boucle à retour unitaire afin de mesurer les erreurs d’asservissement.
Figure 14 : Schéma de la boucle de commande
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 34 / 56
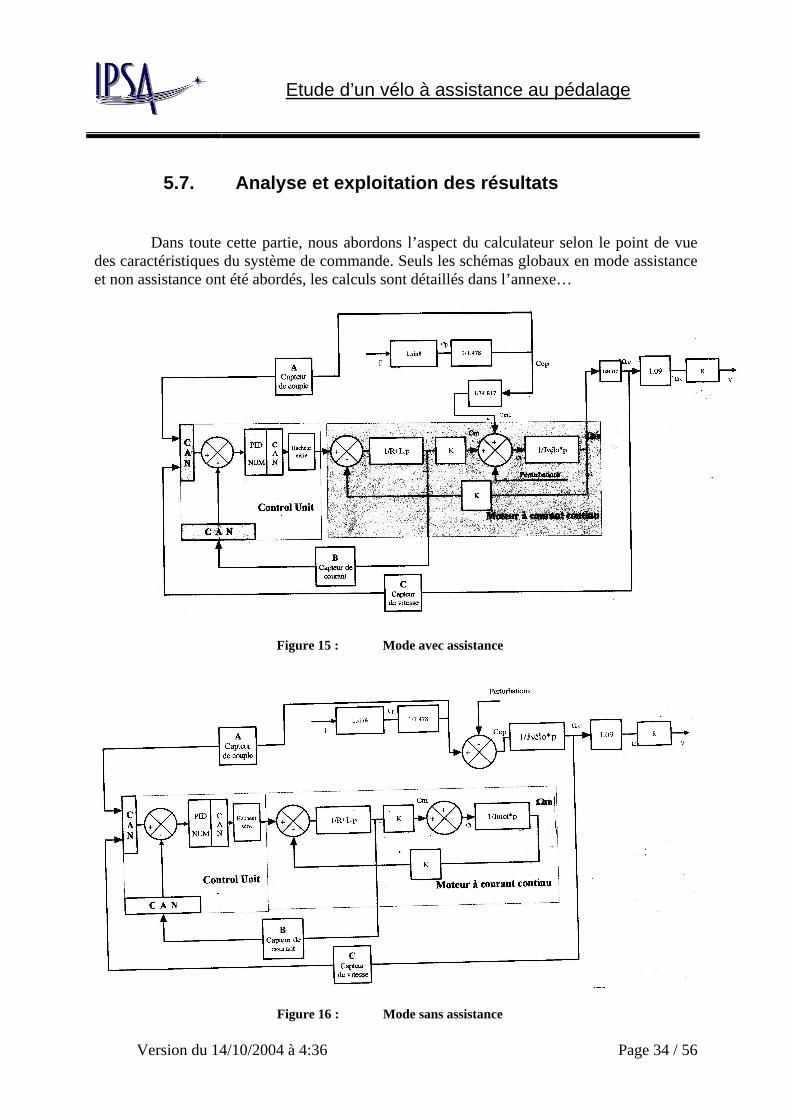
5.7. Analyse et exploitation des résultats
Dans toute cette partie, nous abordons l’aspect du calculateur selon le point de vue des caractéristiques du système de commande. Seuls les schémas globaux en mode assistance et non assistance ont été abordés, les calculs sont détaillés dans l’annexe…
Figure 15 : Mode avec assistance
Figure 16 : Mode sans assistance
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 35 / 56
6. Troisième Partie : Propositions d’améliorations
6.1. Une nouvelle fonction : la recharge de la batt erie sur un vélo en fonctionnement muni du P.A.S
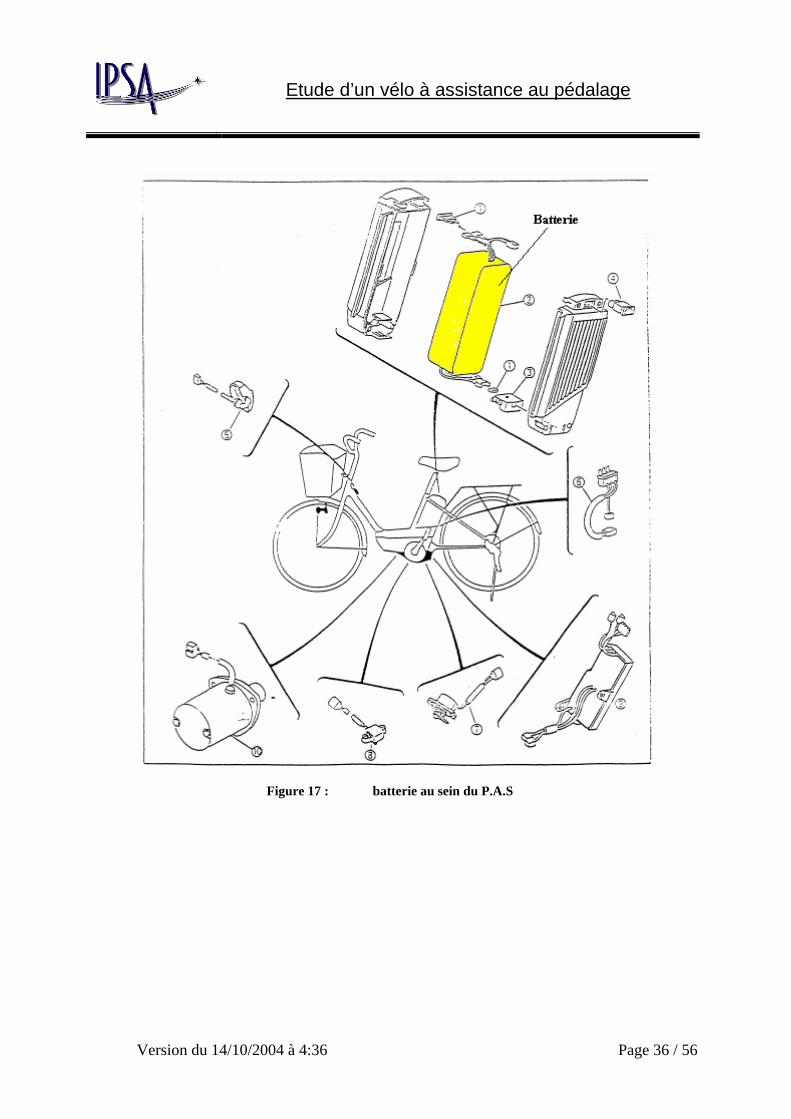
Actuellement, la batterie constitue un élément critique (ne serait ce qu’en poids et en volume (cf figure1) du système P.A.S .Ainsi notre étude se penchera dessus : comment tirer à mieux profit de cette batterie en cours d’un cycle de fonctionnement du P.A.S ; nous nous somme alors penché sur un système de recharge de cette batterie sur un plan de route classique : on dégage alors le cahier des charges suivant :
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 36 / 56
Figure 17 : batterie au sein du P.A.S
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 37 / 56
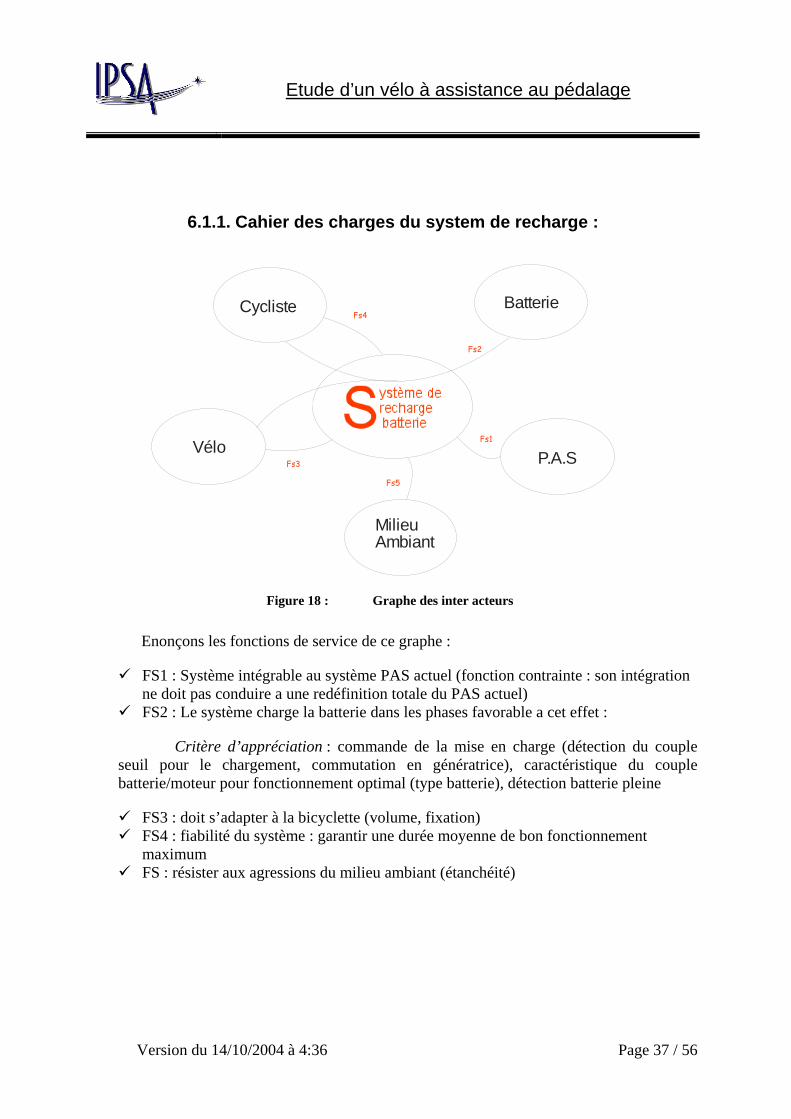
6.1.1. Cahier des charges du system de recharge :
Cycliste Batterie
P.A.S
MilieuAmbiant
Vélo
Fs5
Fs2
Fs3
Fs4
Fs1
Figure 18 : Graphe des inter acteurs
Enonçons les fonctions de service de ce graphe :
� FS1 : Système intégrable au système PAS actuel (fonction contrainte : son intégration ne doit pas conduire a une redéfinition totale du PAS actuel)
� FS2 : Le système charge la batterie dans les phases favorable a cet effet :
Critère d’appréciation : commande de la mise en charge (détection du couple seuil pour le chargement, commutation en génératrice), caractéristique du couple batterie/moteur pour fonctionnement optimal (type batterie), détection batterie pleine
� FS3 : doit s’adapter à la bicyclette (volume, fixation) � FS4 : fiabilité du système : garantir une durée moyenne de bon fonctionnement
maximum � FS : résister aux agressions du milieu ambiant (étanchéité)

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 38 / 56
6.1.2. Choix de la batterie
Actuellement encore 3 types de batteries équipent les systèmes PAS, mais nous montrerons que pour le système de recharge,réservé d’abord au haut de gamme un type s’impose :les batteries nickel métal hydrure(Ni-Mh) .
Les 3 types de batteries sont les batteries à plomb, Nickel-Cadium et Nickel Metal hydrure.
Déjà le choix de la Nickel-Cadium, bien qu’elle équipe l’essentiel des vélo s’élimine tout seul, car en effet cette batterie souffre d’un effet mémoire (perte de capacité avec le temps) et pour l’éviter on recommande de décharger complètement la batterie avant de la recharger et de la conserver déchargée, ce qui vas a l’encontre de la logique de fonctionnement du système que nous voulons.
Restent les batteries au plomb il est vrai bon marché mais qui pèsent trois fois plus qu’une batterie Métal hydrure (13 kg contre 4kg) pour une capacité plus de deux fois plus faible (30 Watt/h /kg contre 80 Wh/kg) ; ainsi la fonction d’adaptation au vélo serait plus facile à réaliser avec la Nickel Metal hydrure pour une capacité beaucoup plus grande, l’hésitation n’est alors pas possible étant donné que ses batteries équipe déjà les vélos haut de gamme des constructeurs.
Donnons alors plus en détail les caractéristiques de ces batteries Ni-Mh :
Tension Capacité Autonomie (sans recharge) Poids Prix
24V 7A/h 60 Km 4Kg 500€
6.1.3. La recharge de la batterie
Le moteur fournit une puissance en courant continu à la batterie, ce qui permet son rechargement. Cette tension est variable : en fonction de la vitesse de rotation de la roue (variable car la vitesse du vélo est elle-même variable), le moteur tourne plus ou moins vite et donc fournit une tension plus ou moins forte ; toutefois, cette tension varie de façon continue, et lentement (le système mécanique du vélo et du cycliste possède une forte inertie), ce qui permet de recharger la batterie de façon correcte.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 39 / 56
Voyons maintenant en quelle proportion sera rechargée ladite batterie. Afin d’être rechargée, celle-ci nécessite une certaine puissance horaire. On calcule celle-ci par la formule :
Wh=U.Ah
Or la tension de la batterie est de 24 volts et sa capacité 7 ampères heure. On obtient donc :
Wh=24*7=168 Wh
Si l’on prend en compte les rendements, avec un rendement de charge (énergie dissipée lors de la charge) égal à 0,7 et un rendement du générateur de 0,8 (les pertes mécaniques sont pour le moment négligées) on obtient une puissance horaire à fournir de :
WhWnecessaireh 300
8,0*7,0
168 ==
Ceci signifie qu’une charge de 300 W pendant 1 heure rechargera la batterie à 100 %, mais aussi qu’une charge de 100 W pendant 10 minutes la rechargera à 5,5 %.
6.1.4. 3.1.5Mécanisme de commutation
Pour recharger notre batterie encours d’utilisation, il faut que notre moteur courant continu puisse commuté du rôle moteur au mode génératrice suivant les conditions qui lui sont imposées ; ainsi ce système de commutation parait primordial à analyser.
On divisera cette partie en deux : la détection de la phase de recharge et la commutation proprement dite.
6.1.4.1. Détection de la recharge
Pour les modèles du P.A.S possédant encore le capteur de couple et le capteur de vitesse de rotation, on les utilisera de telle sorte que : lorsque le couple est quasi nul et que la vitesse dépasse un certain seuil à définir (le seuil peut être définit en fonction de la capacité de recharge : la recharge ne devient sensible qu’à une certaine vitesse donc pas de commutation avant), la commutation est effectuée.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 40 / 56
Pour les derniers P.A.S munis de l’unique capteur de couple il conviendrait de partir sur un seuil unique de couple/tps de tel sorte que : si le couple fourni par le cycliste est quasi nul durant une période représentative (il serait inutile de démarrer le processus a chaque arrêt du pédalage) la commutation en mode génératrice est effectué)
6.1.4.2. Commutation proprement dite
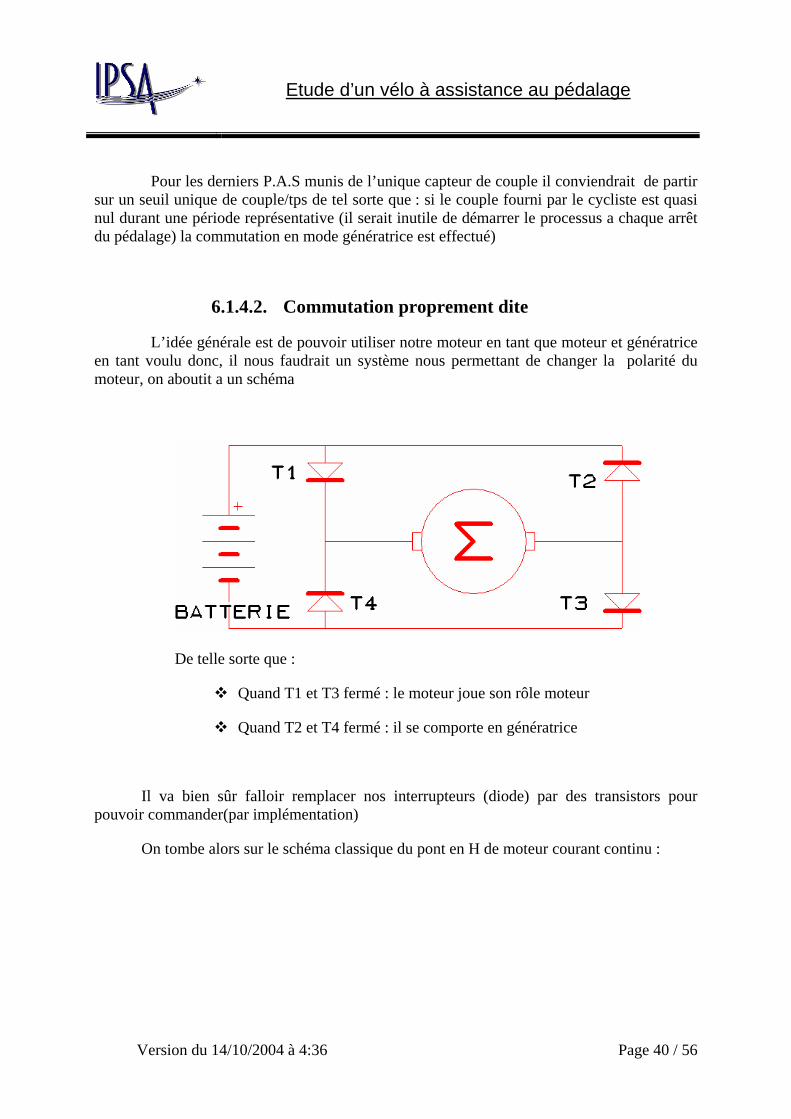
L’idée générale est de pouvoir utiliser notre moteur en tant que moteur et génératrice en tant voulu donc, il nous faudrait un système nous permettant de changer la polarité du moteur, on aboutit a un schéma
De telle sorte que :
� Quand T1 et T3 fermé : le moteur joue son rôle moteur
� Quand T2 et T4 fermé : il se comporte en génératrice
Il va bien sûr falloir remplacer nos interrupteurs (diode) par des transistors pour pouvoir commander(par implémentation)
On tombe alors sur le schéma classique du pont en H de moteur courant continu :

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 41 / 56
Figure 19 : Schéma de base d'un pont en H
On commandera ce pont avec les entrée logique In1 et In2 qui selon leurs états (0 ou 1) imposeront un état (passant ou non) aux transistors se qui permettra d’alimenter le moteur ou de l’arrêter et de l’utiliser en génératrice en profitant de l’effet d’inertie (il continuera a tourner)
Quand l'entrée In 1 (In 2) est active, le transistor T1 (T2) est passant et le transistor T4 (T3) est bloqué. Quand In 1 est actif, le pôle 1 du moteur est au potentiel Vcc, et lorsque In 1 est à l'état bas, le pôle 1 du moteur est à la masse.
Le tableau des états est le suivant :
In1 In2 Moteur
0 0 arrêt
0 1 Sens1
1 0 Sens2
1 1 arrêt
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 42 / 56
Remarque : dans notre système P.A.S les 2 sens de rotations du moteur ne sont pas nécessaire : on aura donc trois états caractéristiques du fonctionnement de notre système de recharge
C’est dans les états d’arrêt que notre moteur est générateur.
Les diodes sont la par protection pour pas avoir de courant dans les transistors, les protéger des surtensions produites par le moteur (diode de roue libre).
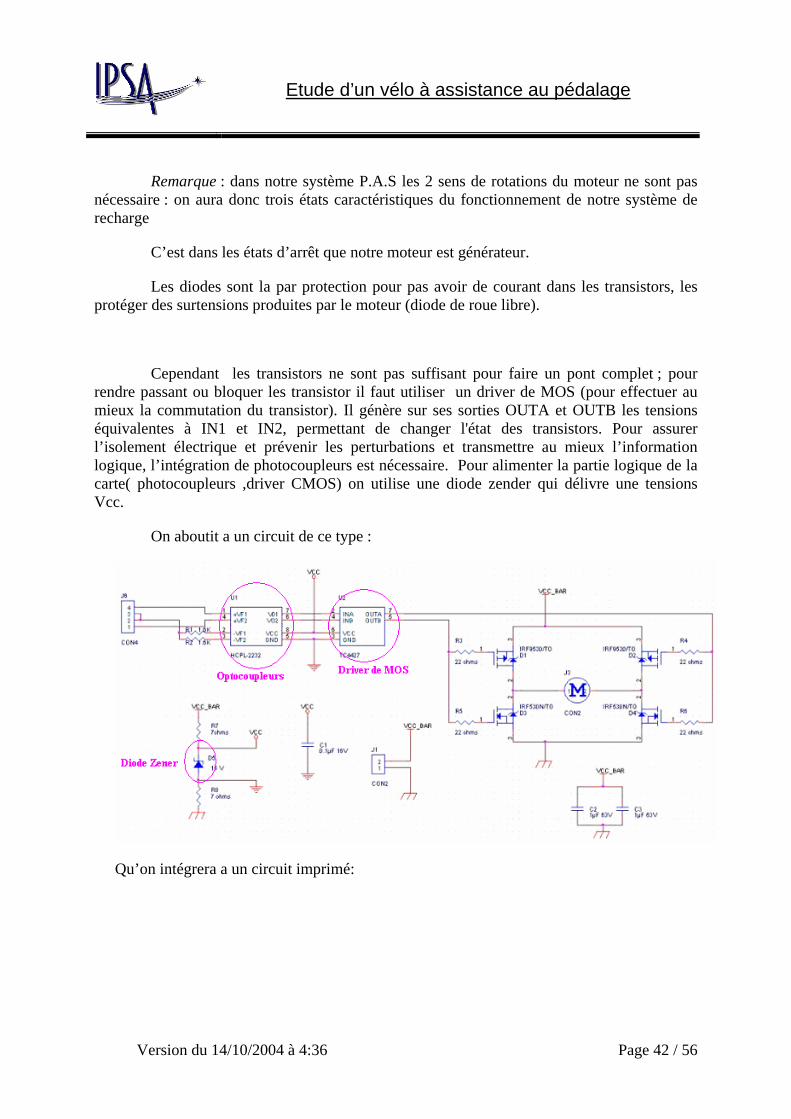
Cependant les transistors ne sont pas suffisant pour faire un pont complet ; pour rendre passant ou bloquer les transistor il faut utiliser un driver de MOS (pour effectuer au mieux la commutation du transistor). Il génère sur ses sorties OUTA et OUTB les tensions équivalentes à IN1 et IN2, permettant de changer l'état des transistors. Pour assurer l’isolement électrique et prévenir les perturbations et transmettre au mieux l’information logique, l’intégration de photocoupleurs est nécessaire. Pour alimenter la partie logique de la carte( photocoupleurs ,driver CMOS) on utilise une diode zender qui délivre une tensions Vcc.
On aboutit a un circuit de ce type :
Qu’on intégrera a un circuit imprimé:

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 43 / 56

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 44 / 56
6.2. Passage de commande en effort à commande en vitesse
Il est possible d’imaginer un autre type de commande permettant d’offrir une assistance de niveau comparable bien que de nature différente. En effet, alors que l’on a vu que l’assistance actuelle est proportionnelle à l’effort consentit par le cycliste, dans la limite d’une vitesse réglementaire, on peut tout aussi bien imaginer une assistance uniquement fonction de la vitesse du vélo.
Une telle assistance permettrait de faire l’économie du capteur de couple, ce qui entraînerait un gain de poids mais surtout de simplicité ; entraînant par la suite des économies de coût de fabrication.
6.2.1. Modification du cahier des charges
Une commande admettant uniquement la vitesse en entrée sera forcement différente d’une commande admettant également le couple fourni. De ce fait certaines modifications doivent être apportées au cahier des charges :
� La notion d’égalité entre puissance de l’assistance et puissance fournie par le cycliste doit être abandonnée car il n’existe plus de moyen de déterminer cette puissance du cycliste.
� L’assistance doit être globalement proportionnelle à la vitesse, car l’effort du cycliste l’est également. Ceci permet d’assister le cycliste au mieux, c'est-à-dire quand il en a besoin. Toutefois ceci n’est pas valable sur toute la plage de vitesse :
� A vitesse nulle et très faible, il ne faut pas d’assistance, sinon le vélo avancerait tout seul, ce qu’il faut absolument éviter.
� A vitesse supérieure à 24 Km/Heure, l’assistance doit être nulle sous peine d’enfreindre de nombreuses réglementations.
Il résulte de ces modifications que la courbe de commande la plus appropriée est une parabole coupant l’axe des abscisses à faible vitesse, et le coupant de nouveau vers 24 Km/h. Le sommet de cette parabole est placé à la vitesse usuelle de pédalage à effort modéré, soit aux environs de 15 Km/h.
6.2.2. Commande du moteur
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 45 / 56
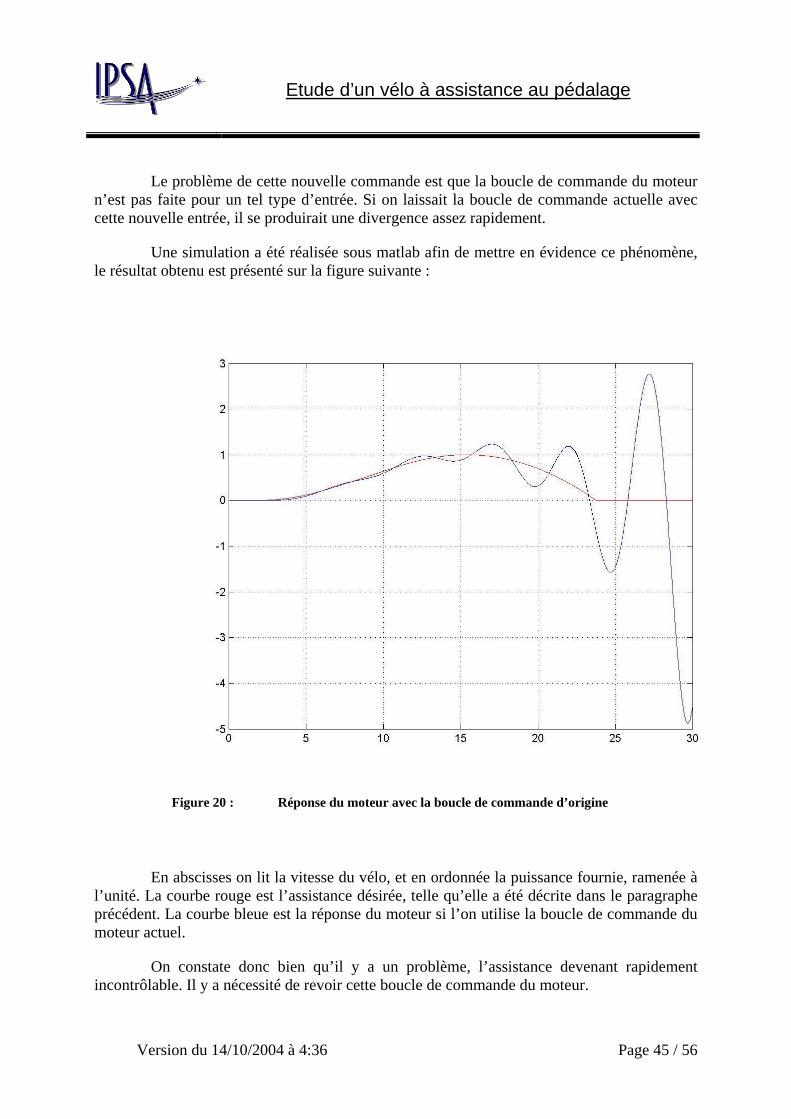
Le problème de cette nouvelle commande est que la boucle de commande du moteur n’est pas faite pour un tel type d’entrée. Si on laissait la boucle de commande actuelle avec cette nouvelle entrée, il se produirait une divergence assez rapidement.
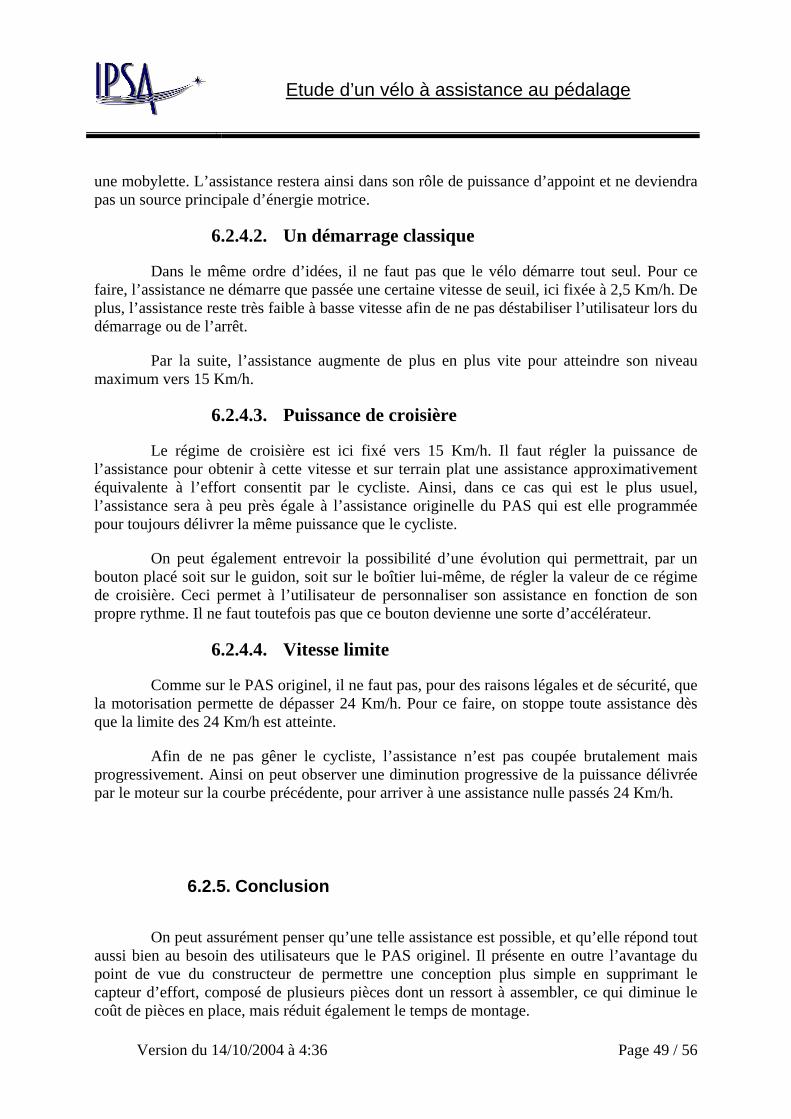
Une simulation a été réalisée sous matlab afin de mettre en évidence ce phénomène, le résultat obtenu est présenté sur la figure suivante :
Figure 20 : Réponse du moteur avec la boucle de commande d’origine
En abscisses on lit la vitesse du vélo, et en ordonnée la puissance fournie, ramenée à l’unité. La courbe rouge est l’assistance désirée, telle qu’elle a été décrite dans le paragraphe précédent. La courbe bleue est la réponse du moteur si l’on utilise la boucle de commande du moteur actuel.
On constate donc bien qu’il y a un problème, l’assistance devenant rapidement incontrôlable. Il y a nécessité de revoir cette boucle de commande du moteur.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 46 / 56
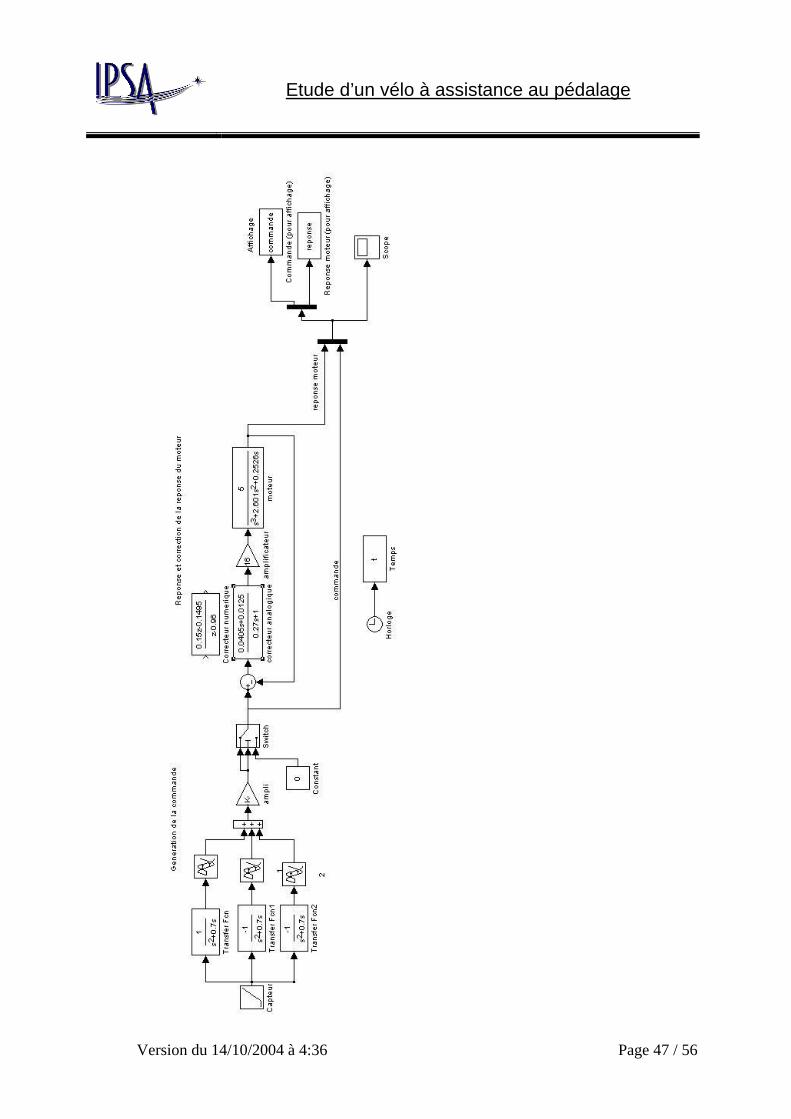
6.2.3. Nouvelle boucle de commande
Afin de concevoir plus facilement un boucle de commande adaptée au besoin ayant été définis précédemment, nous nous sommes servis du logiciel matlab, et plus particulièrement de l’outil simulink qui permet d’agir en temps réel sur les correcteurs.
Un premier ensemble se charge de générer la fonction de commande, soit la parabole décrite plus haut. Ce système est composé de trois fonctions : une première qui génère la pente ascendante, et deux autres qui font redescendre la courbe. Un jeu de temporisateurs permet de faire agir ces différentes fonctions au moment le plus opportun et donc de générer la fonction voulue. Un switch permet d’avoir une assistance nulle lorsque l’on dépasse 24 Km/h.
Ceci vaut pour la génération de la commande. Mais ce que l’on cherche à faire c’est modéliser la réaction du moteur face à cette commande et à générer une boucle de commande permettant de lui faire suivre cette consigne.
Pour le correcteur du moteur, il est possible d’utiliser deux types de correcteurs : un analogique ou un numérique. Les deux ont été testés et donnent des résultats probants. Toutefois on utilisera le correcteur numérique en raison de sa réponse légèrement meilleure et de sa relative ressemblance avec le système d’origine, lui aussi numérique.
Le schéma suivant présente la modélisation retenue pour cette chaîne de commande.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 47 / 56
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 48 / 56
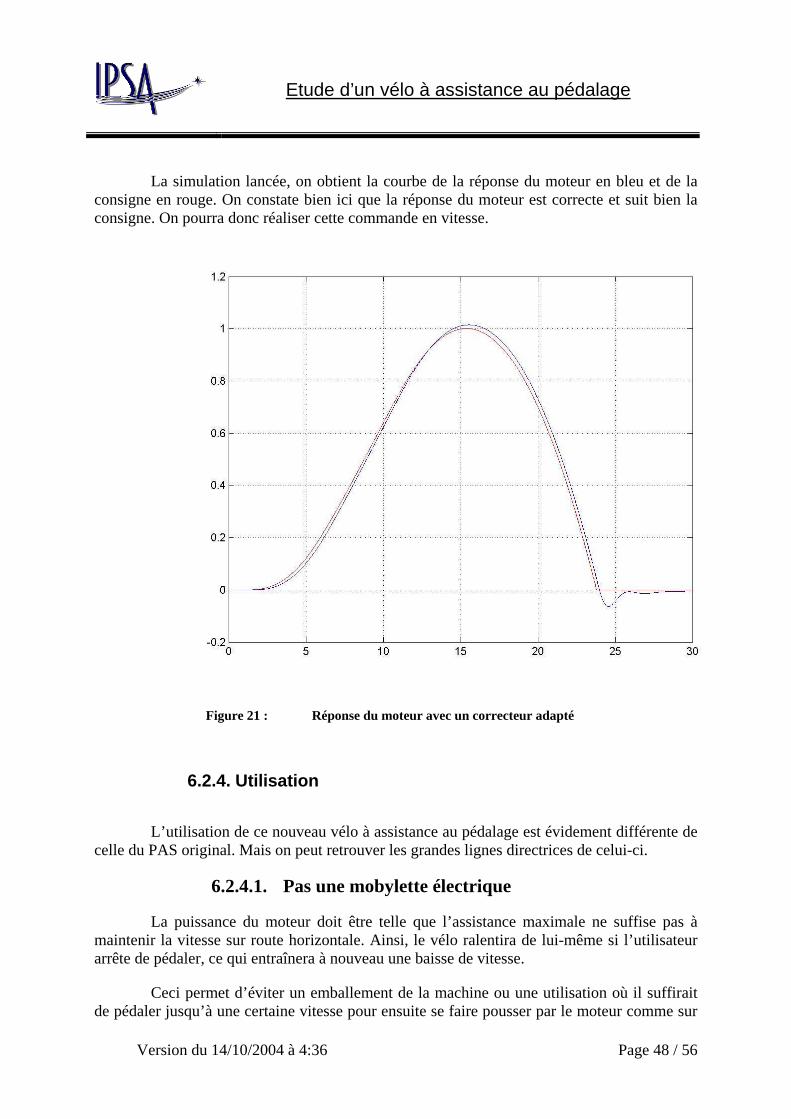
La simulation lancée, on obtient la courbe de la réponse du moteur en bleu et de la consigne en rouge. On constate bien ici que la réponse du moteur est correcte et suit bien la consigne. On pourra donc réaliser cette commande en vitesse.
Figure 21 : Réponse du moteur avec un correcteur adapté
6.2.4. Utilisation
L’utilisation de ce nouveau vélo à assistance au pédalage est évidement différente de celle du PAS original. Mais on peut retrouver les grandes lignes directrices de celui-ci.
6.2.4.1. Pas une mobylette électrique
La puissance du moteur doit être telle que l’assistance maximale ne suffise pas à maintenir la vitesse sur route horizontale. Ainsi, le vélo ralentira de lui-même si l’utilisateur arrête de pédaler, ce qui entraînera à nouveau une baisse de vitesse.
Ceci permet d’éviter un emballement de la machine ou une utilisation où il suffirait de pédaler jusqu’à une certaine vitesse pour ensuite se faire pousser par le moteur comme sur
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 49 / 56
une mobylette. L’assistance restera ainsi dans son rôle de puissance d’appoint et ne deviendra pas un source principale d’énergie motrice.
6.2.4.2. Un démarrage classique
Dans le même ordre d’idées, il ne faut pas que le vélo démarre tout seul. Pour ce faire, l’assistance ne démarre que passée une certaine vitesse de seuil, ici fixée à 2,5 Km/h. De plus, l’assistance reste très faible à basse vitesse afin de ne pas déstabiliser l’utilisateur lors du démarrage ou de l’arrêt.
Par la suite, l’assistance augmente de plus en plus vite pour atteindre son niveau maximum vers 15 Km/h.
6.2.4.3. Puissance de croisière
Le régime de croisière est ici fixé vers 15 Km/h. Il faut régler la puissance de l’assistance pour obtenir à cette vitesse et sur terrain plat une assistance approximativement équivalente à l’effort consentit par le cycliste. Ainsi, dans ce cas qui est le plus usuel, l’assistance sera à peu près égale à l’assistance originelle du PAS qui est elle programmée pour toujours délivrer la même puissance que le cycliste.
On peut également entrevoir la possibilité d’une évolution qui permettrait, par un bouton placé soit sur le guidon, soit sur le boîtier lui-même, de régler la valeur de ce régime de croisière. Ceci permet à l’utilisateur de personnaliser son assistance en fonction de son propre rythme. Il ne faut toutefois pas que ce bouton devienne une sorte d’accélérateur.
6.2.4.4. Vitesse limite
Comme sur le PAS originel, il ne faut pas, pour des raisons légales et de sécurité, que la motorisation permette de dépasser 24 Km/h. Pour ce faire, on stoppe toute assistance dès que la limite des 24 Km/h est atteinte.
Afin de ne pas gêner le cycliste, l’assistance n’est pas coupée brutalement mais progressivement. Ainsi on peut observer une diminution progressive de la puissance délivrée par le moteur sur la courbe précédente, pour arriver à une assistance nulle passés 24 Km/h.
6.2.5. Conclusion
On peut assurément penser qu’une telle assistance est possible, et qu’elle répond tout aussi bien au besoin des utilisateurs que le PAS originel. Il présente en outre l’avantage du point de vue du constructeur de permettre une conception plus simple en supprimant le capteur d’effort, composé de plusieurs pièces dont un ressort à assembler, ce qui diminue le coût de pièces en place, mais réduit également le temps de montage.

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 50 / 56
Le constructeur est donc gagnant sur tous les points avec cette évolution, mis à part le fait qu’il faut revoir les chaînes d’assemblage pour un produit qui du côté de l’utilisateur est quasi-identique. Le saut vaut donc à priori la peine d’être fait.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 51 / 56
7. Conclusion
L’étude du Yamaha PAS est maintenant terminée, il est maintenant possible d’en tirer des conclusions.
Premièrement on peut constater que le Yamaha PAS répond tout à fait correctement aux spécifications édictées au début. Le système est peu encombrant, fiable, et il peut fournir une puissance d’appoint équivalente à la puissance du cycliste. Tout ceci est réalisé dans le respect des différentes réglementations en vigueur.
Cette étude du Yamaha PAS a permis de spécifier les caractéristiques du moteur et du système tout entier, on peut donc dire que notre but initial est atteint : les choix techniques du constructeur sont maintenant compris et approuvés. Ceci n’a été possible que par une étude sur le système reprise à son origine, puis en comparant les résultats avec les choix techniques effectués sur le Yamaha PAS.
D’autre part, les deux améliorations proposées présentent toutes les deux un intérêt certain. Que ce soit la possibilité de recharger les batteries, ce qui accroît sensiblement l’autonomie, ou bien de piloter le moteur avec une seule entrée en vitesse, ce qui simplifie le mécanisme, les deux systèmes proposés apportent un plus certain par rapport à la version d’origine. On peut toutefois poursuivre les recherches en ce sens car les études effectuées ne sont que préliminaires et en aucun cas définitives. Il s’agit simplement d’études de faisabilité, et à ce titre aucune conclusion ne doit être considérée comme définitive.
L’étude est donc terminée, tous les points à éclaircir l’ayant été. Une étude future devra se concentrer sur les détails techniques des améliorations proposées, voire envisager de nouvelles améliorations.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 52 / 56
8. Annexes
8.1. Déroulement du projet
Le projet a commencé par la lecture des documents en notre possession et par la recherche d’autres documents traitant du sujet. Ensuite, lorsque le sujet nous est devenu plus familier, une première réunion nous a permis d’identifier nos objectifs et de les articuler au sein d’un premier plan.
Une fois cette ébauche de plan réalisé, une réunion avec M. Salvan était nécessaire afin de vérifier le bien fondé de notre démarche. Celle-ci était globalement bonne, même si certaines parties ont dû être détaillées et expliquées. Cette étape nous a obligés à mieux connaître notre sujet et à mettre en place notre argumentaire, même si, finalement, nous avons trouvé un terrain d’entente approuvé par tous qui différait quelques peu du projet originel.
Cette première étape fixée, suivit la répartition des tâches entre nous trois. Alors que Brice réalisait l’étude préliminaire, Salomon faisait l’étude du PAS et les études des deux améliorations étaient dévolues à Brice et Steeve pour la recharge de la batterie, et à Salomon et Steeve pour l’étude de la commande uniquement en vitesse. Le regroupement des parties, la mise en page et l’abstract étaient à la charge de Steeve.
Ensuite chacun devait travailler sur sa partie jusqu’à la prochaine réunion. Au niveau de cette étape il faut dire qu’il y a eu un ralentissement certain, provoqué par un emploi du temps chargé d’échéances à plus court terme qui nous ont éloignés de notre objectif. Après donc quelques mois, seule la partie de l’étude mécanique de Salomon était donc disponible.
Par la suite, les réunions avec M. Salvan ont eu lieu de plus en plus souvent, en parallèle de progrès plus notables dans les différentes autres parties. Petit à petit, le rapport s’est construit, la règle implicitement utilisée étant de fournir une version de travail dès que possible afin que chacun puisse repérer les modifications à apporter.
Cette phase de recherche et de rédaction se révéla assez longue, bien plus longue que prévu même. Il est certain que celle-ci a été sous-estimée et qu’il faudra en tenir compte pour de futurs rapports.
La phase finale est donc la relecture du rapport afin de détecter d’autres erreurs, et le choix de la mise en page adéquate.
En conclusion, on peut retirer de ce travail plusieurs enseignements pour la suite. En premier lieu, il est évident qu’il y a eu un assez fort manque de communication au début du projet. Peu de réunion inter élèves ou avec le professeur ont permis un certain relâchement qui

Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 53 / 56
a conduit à prendre un retard conséquent dans l’évolution du projet. Fort heureusement, ce manque a été identifié à temps, et les réunions et la communication en général a été bien plus forte par la suite. On peut donc dire que ce point a été assez bien assimilé.
Ensuite, on peut plus généralement pointer du doigt une certaine tendance à se reposer sur les documents en notre possession depuis le début du projet. Des recherches ont bien évidement été faites (principalement sur l’internet), mais il s’agissait en majorité de documentation, et les documents apportant réellement une certaine matière n’ont été ajoutés que bien plus tard. Ceci aurait dû être fait dès la première phase du projet et plus aucune recherche n’aurait (dans l’idéal) dû être nécessaire.
On peut tout de même dire que le projet s’est globalement bien terminé, même si certaines erreurs ont été commises.
8.2. Bibliographie
Concours interne de recrutement de professeurs agrégés, session 2000, section Mécanique. Sujet du concours et correction in « Technologies et formation », n°105, pages 58 à 63
Système d’assistance au pédalage Yamaha, par Benoît Jacquet et Luc Chevalier, in « Technologies » n°112, mars 2001, pages 29 à 35
Moyeu de bicyclettes à vitesses intégrées Nexus, par Daniel Bernard et Olivier Calvet, in »Technologies » n°113, Avril 2001, pages 28 à 34
Document ressource du lycée Chaptal de St Brieu rédigé par Mr Aimé Scolan(agrégé d e mécanique)
Document ressource de l’ENS Cachan sur les vélos assistance électrique
Site internet de l’Association Nationale des créateurs de Robots http://www.ancr.org
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 54 / 56
8.3. Glossaire
PAS : Power Assist System System , système d’assistance au pédalage développé par Yamahe
Roue libre Liaison permettant de transmettre un couple dans un sens de rotation, et de découpler les deux systèmes dans l’autre sens de rotation. C’est cette liaison qui permet de ne pas entraîner la roue arrière lors de rétropédalage en vélo
La roue libre peut être à aiguille ou à cliquet
K Dans notre étude, gain de l’assistance : rapport entre la puissance du moteur et la puissance du cycliste. Vaut 1 usuellement
W fext Travail des forces extérieures au système
W fint Travail des forces internes au système
J Moment d’inertie
Θ Angle définissant la rotation des roues
Γ Pente de la route
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 55 / 56
Driver de MOS Le transistor MOS est commandé en tension sur sa grille par un signal qui provient d'une logique de commande basse puissance. Afin d'effectuer au mieux la commutation du transistor, il est nécessaire de placer un driver entre la logique et la grille du MOS
Optocoupleur Un optocoupleur ou photocoupleur est un dispositif optoélectronique qui transmet des informations logiques ou analogiques sous forme de signal électrique via une voie optique qui isole électriquement l'entrée de la sortie.
Une des fonctions principales est d'assurer l'isolement électrique donc de prévenir des perturbations de fonctionnement des équipements et matériels.
Etude d’un vélo à assistance au pédalage
Version du 14/10/2004 à 4:36 Page 56 / 56
Différents drivers
Drivers pour moteurs (L293, L297, L298, L6203)
Circuits intégrés de type pont H pour interfacer un moteur avec un microcontrôleur.
Les circuits ponts en H sont des circuits de commande de puissance utilisés entre autre pour les moteurs. Ils intègrent presque tous les composants nécessaires pour la réalisation d'un montage en pont. Il permettent d'interfacer facilement un moteur à courant continu avec un microcontrôleur. Ils permettent le contrôle du sens de rotation et de la vitesse du moteur.
Caractéristiques des drivers
Référence Désignation V
max I max Boitier Datasheet
L293D 2 ponts H 36V 600mA DIP16 l293d.pdf
L298 2 ponts H 46V 2A Multiwatt15 l298.pdf
L6203 1 pont H 48V 4A Multiwatt11 l6203.pdf