presentation for the 19th eurostar users conference june 2011
TRANSCRIPT

Consider Covariance Analysis Monte Carlo and Collocation
withOR.A.SI – (Orbit and Attitude Simulator)
Antonios Arkas Flight Dynamics Engineer
-0,0004 -0,0002 0,0000 0,0002 0,0004
-0,0004
-0,0002
0,0000
0,0002
0,0004
ey
ex

1. Advances in OR.A.SI
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
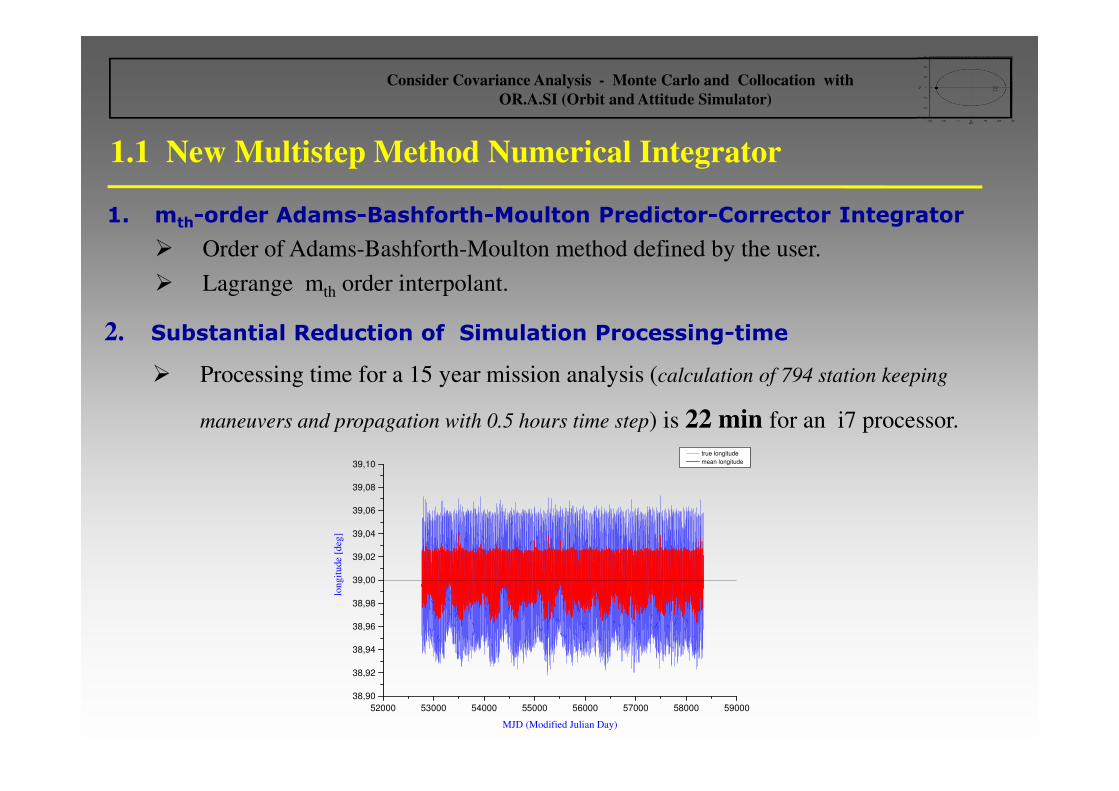
1.1 New Multistep Method Numerical Integrator
1. mth-order Adams-Bashforth-Moulton Predictor-Corrector Integrator
� Order of Adams-Bashforth-Moulton method defined by the user.
� Lagrange mth order interpolant.
2. Substantial Reduction of Simulation Processing-time
� Processing time for a 15 year mission analysis (calculation of 794 station keeping
maneuvers and propagation with 0.5 hours time step) is 22 min for an i7 processor.
52000 53000 54000 55000 56000 57000 58000 59000
38,90
38,92
38,94
38,96
38,98
39,00
39,02
39,04
39,06
39,08
39,10
true longitude
mean longitude
longit
ude
[deg
]
MJD (Modified Julian Day)
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
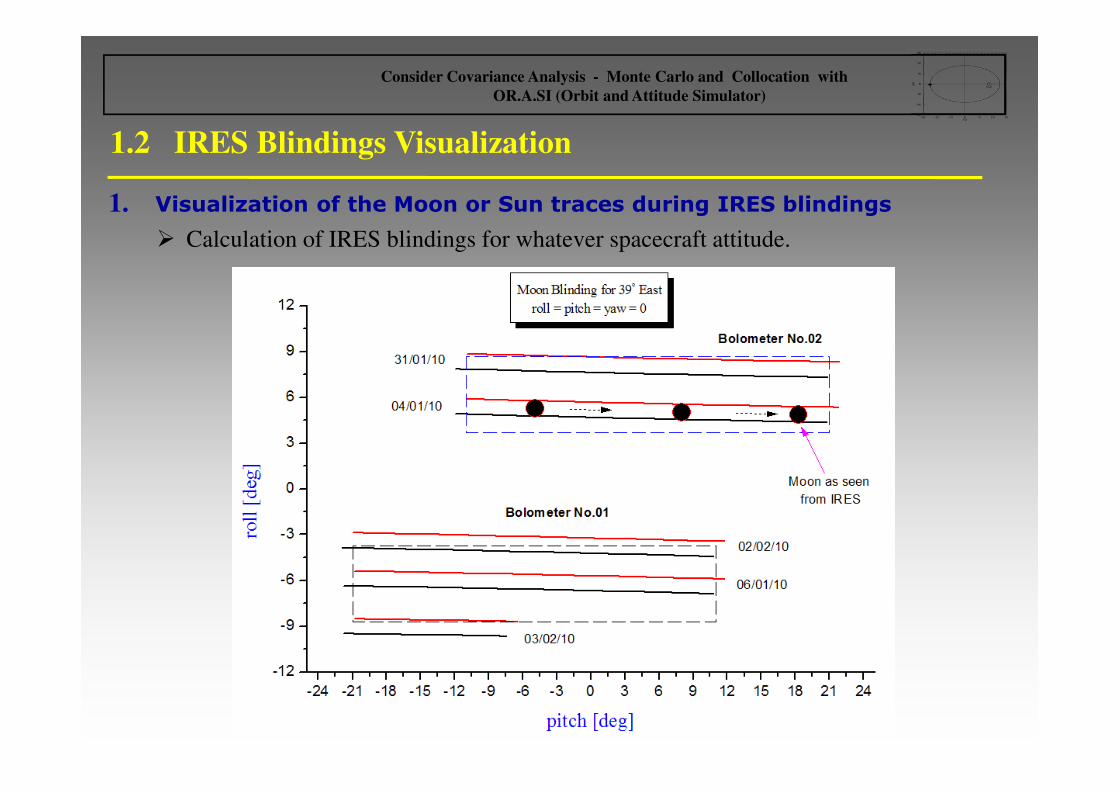
1.2 IRES Blindings Visualization
1. Visualization of the Moon or Sun traces during IRES blindings
� Calculation of IRES blindings for whatever spacecraft attitude.
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)

1.3 Relocation Maneuvers Calculation for GEO Spacecrafts
1. Relocation Module Characteristics
� Calculation of velocity increments corresponding to drift setting and drift stop
maneuvers each one of which is performed by means of two tangential maneuvers.
� Manual setting of first drift setting and last drift stop maneuver epochs i.e.
adjustment of the drift phase duration and control of the relevant propellant
consumption.
� Epoch calculation for the second drift setting maneuver and the first drift stop
maneuver.
� Automatic or manual setting of mean eccentricity during drift phase.
� Plotting of achievable area for mean eccentricity vector during the drift phase.
� Flexibility to choose a specific orbit, for a desired epoch following the last drift
stop maneuver, or initialize a station keeping cycle with desired characteristics (if
reachable).
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
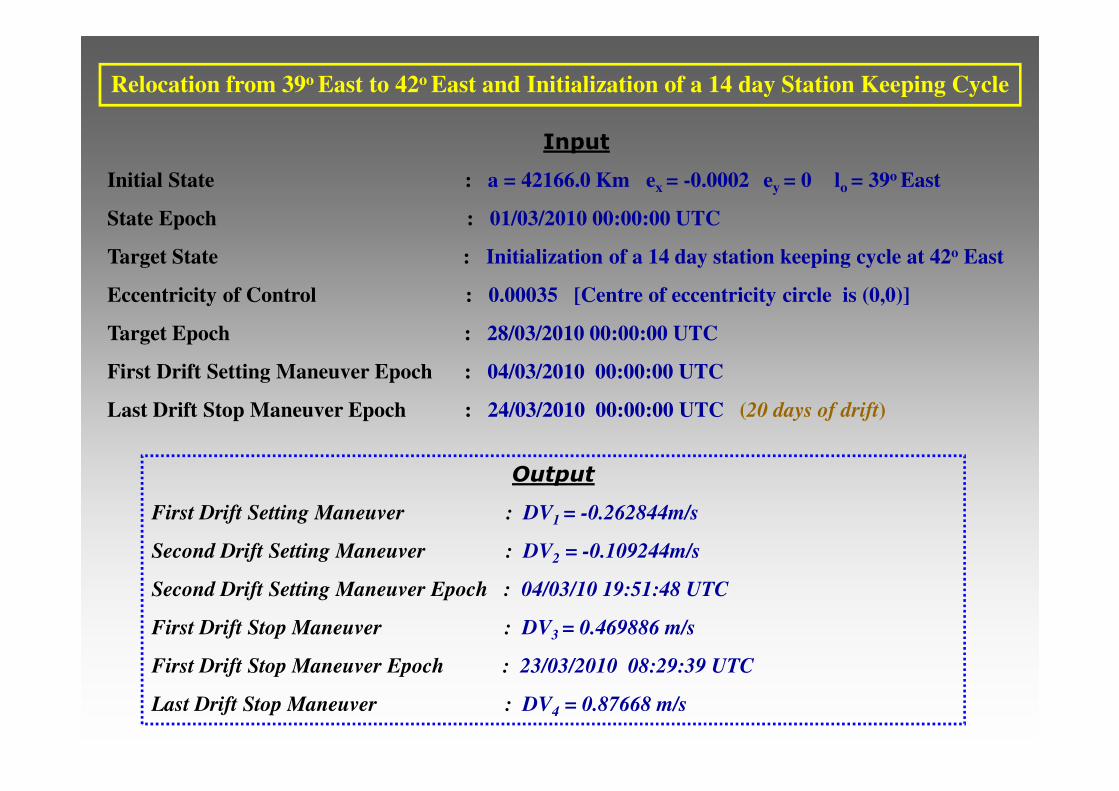
Relocation from 39o East to 42o East and Initialization of a 14 day Station Keeping Cycle
Input
Initial State : a = 42166.0 Km ex = -0.0002 ey = 0 lo = 39o East
State Epoch : 01/03/2010 00:00:00 UTC
Target State : Initialization of a 14 day station keeping cycle at 42o East
Eccentricity of Control : 0.00035 [Centre of eccentricity circle is (0,0)]
Target Epoch : 28/03/2010 00:00:00 UTC
First Drift Setting Maneuver Epoch : 04/03/2010 00:00:00 UTC
Last Drift Stop Maneuver Epoch : 24/03/2010 00:00:00 UTC (20 days of drift)
Output
First Drift Setting Maneuver : DV1 = -0.262844m/s
Second Drift Setting Maneuver : DV2 = -0.109244m/s
Second Drift Setting Maneuver Epoch : 04/03/10 19:51:48 UTC
First Drift Stop Maneuver : DV3 = 0.469886 m/s
First Drift Stop Maneuver Epoch : 23/03/2010 08:29:39 UTC
Last Drift Stop Maneuver : DV4 = 0.87668 m/s

Relocation from 39o East to 42o East – Longitude Evolution
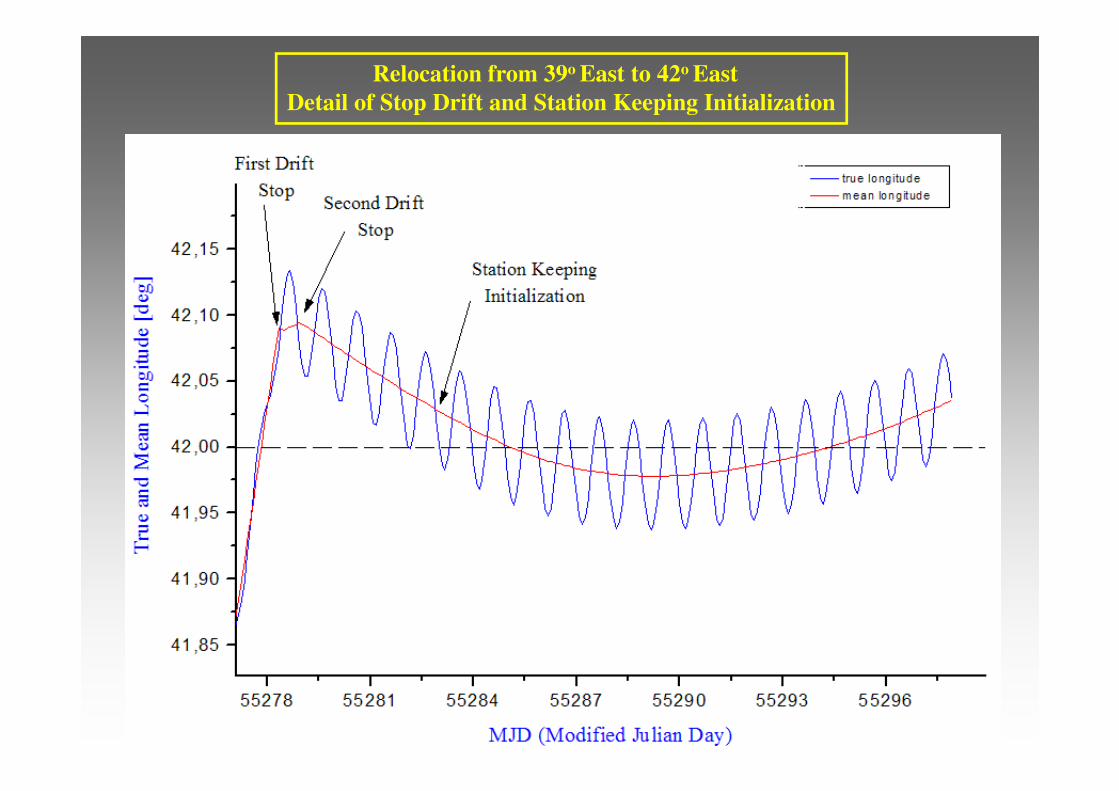
Relocation from 39o East to 42o East
Detail of Stop Drift and Station Keeping Initialization
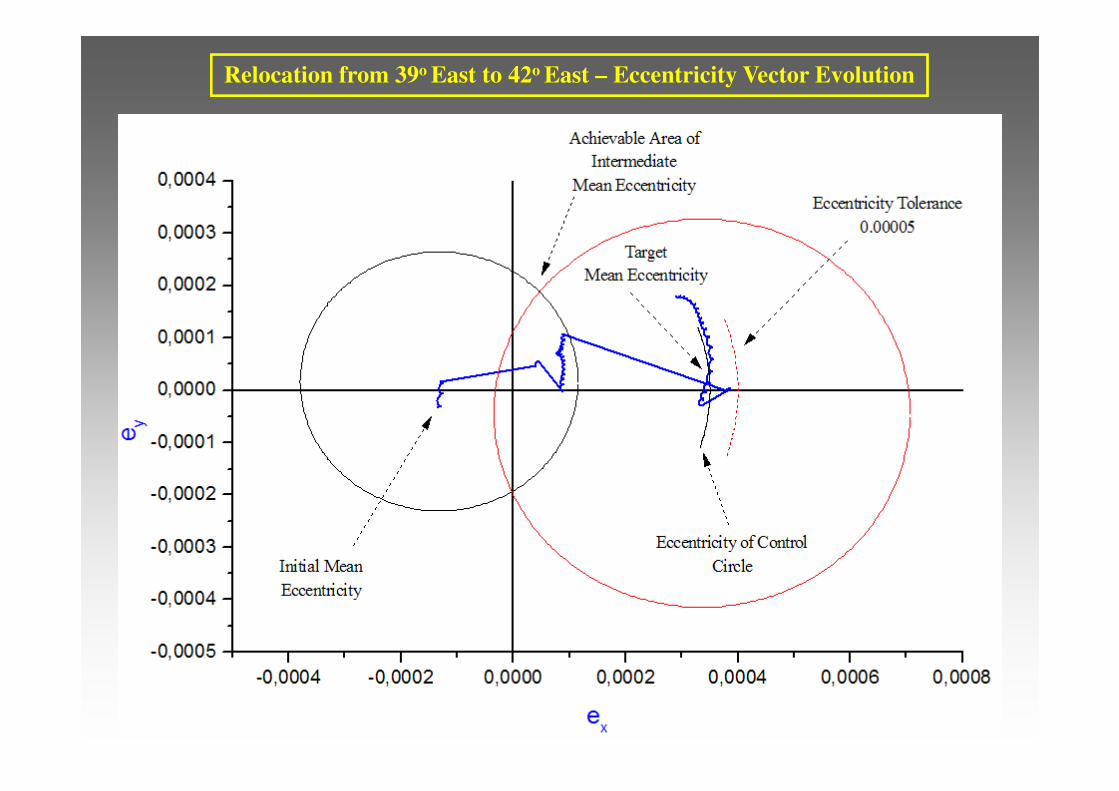
Relocation from 39o East to 42o East – Eccentricity Vector Evolution
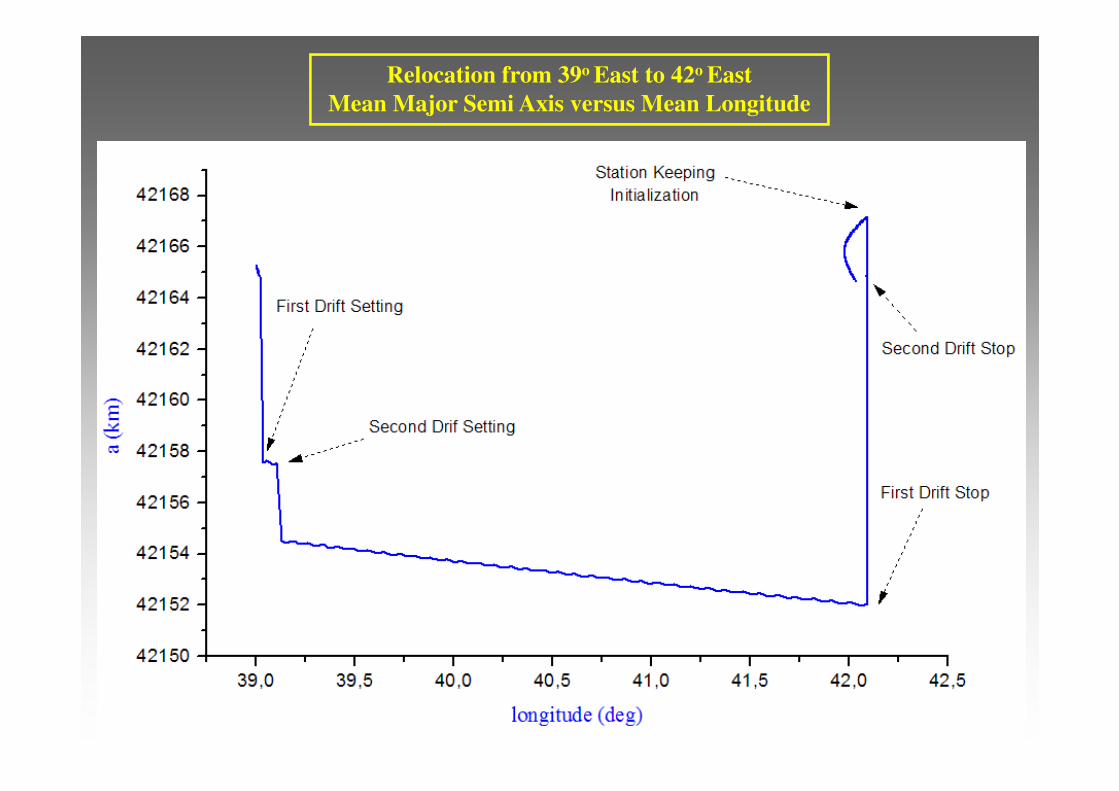
Relocation from 39o East to 42o East
Mean Major Semi Axis versus Mean Longitude

1.4 Theoretical Longitude Window Breakdown (1/2)
1. Input Data
� Station keeping cycle duration. (14 days)
� Nominal longitude. (39o East)
� Longitude window semi dimension. (0.09o)
� Eccentricity of control. (0.0004)
� Time interval between N/S and E/W maneuvers. (2.5 days)
� Mean value of normal velocity increment during N/S maneuvers. (2.0 m/s)
� True longitude 3σ orbit determination error. (0.004o)
� Major semi axis 3σ orbit determination error. (36 m)
� Random realization error of E/W maneuvers. (1 %)
� Deterministic N/S tangential cross coupling. (1.8 %)
� Deterministic N/S radial cross coupling. (3 %)
� Random N/S cross coupling error. (1 %)
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
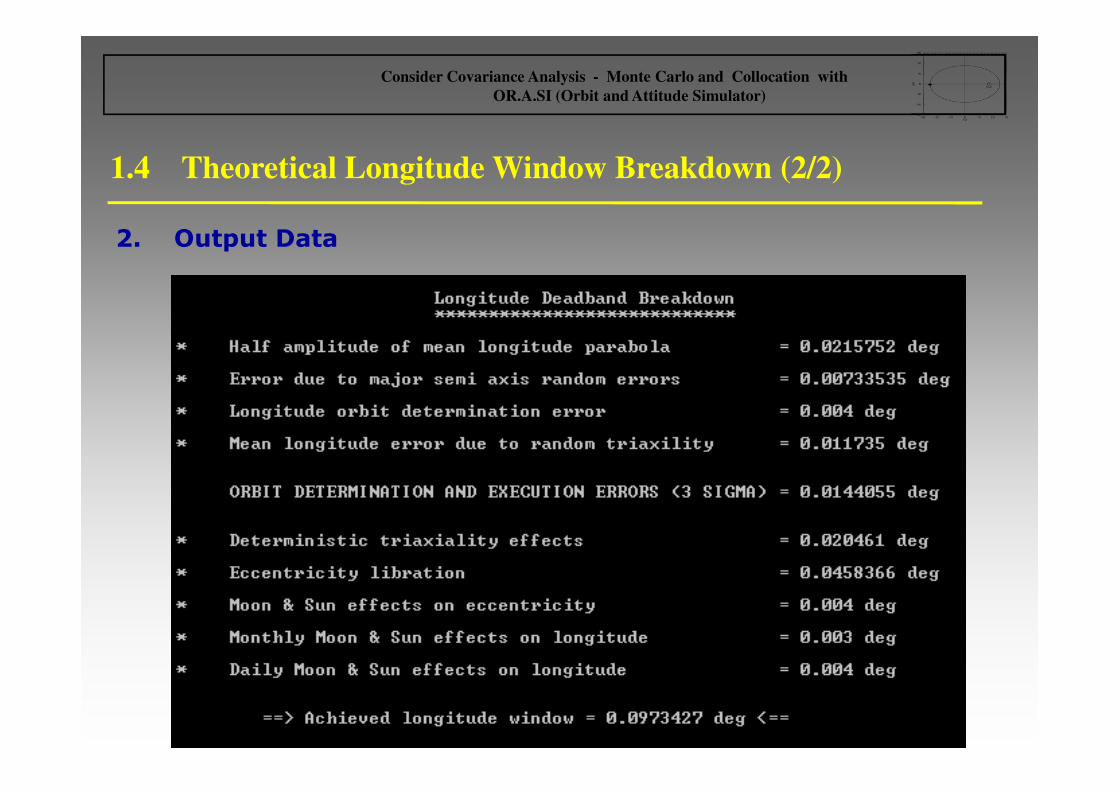
1.4 Theoretical Longitude Window Breakdown (2/2)
2. Output Data
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
1.5 Localization Measurements Simulator
1. Localization Measurements Simulator Characteristics
� Production of range, azimuth and elevation measurements with identically
independently distributed (iid) errors εi for whatever type of orbit and any number
of Earth stations in the relevant coverage.
� Gaussian noise distribution εi with the following characteristics:
• E(εi) = 0, zero mean value
• Var(εi) = σ2i , desired standard deviation
� Possible addition of a systematic error (constant for all campaign measurements) with
specified standard deviation and Gaussian probability distribution.
� Configuration of different measurement plan for each ground station with suitable
choice of the following parameters :
� Type of acquired measurements.
� Error standard deviation.
� Offset of the first localization session.
� Time between sessions.
� Number of sessions.
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
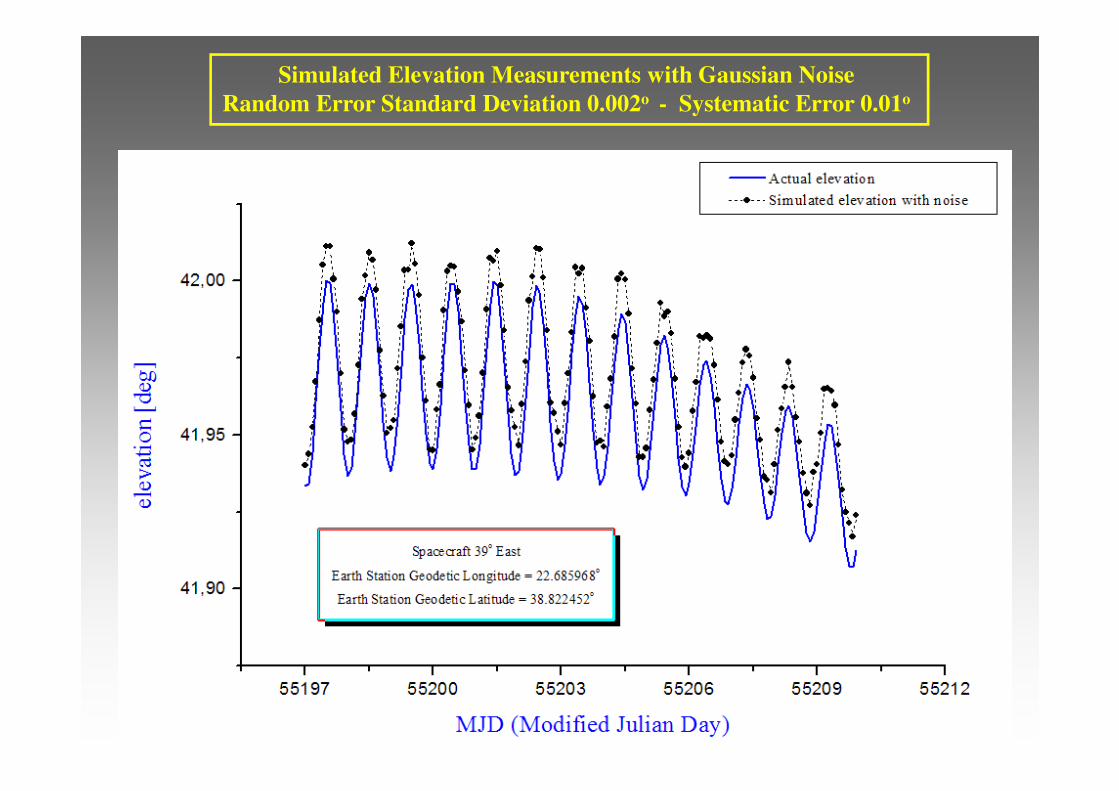
Simulated Elevation Measurements with Gaussian Noise
Random Error Standard Deviation 0.002o - Systematic Error 0.01o
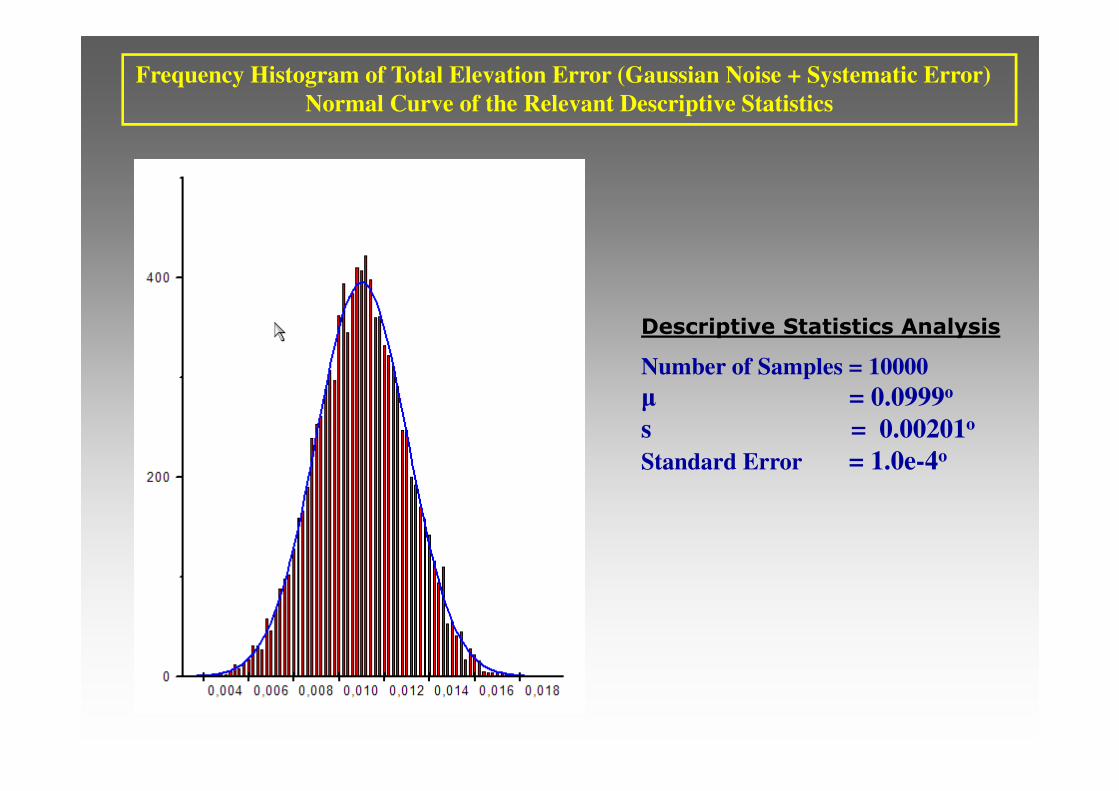
Frequency Histogram of Total Elevation Error (Gaussian Noise + Systematic Error)
Normal Curve of the Relevant Descriptive Statistics
Descriptive Statistics Analysis
Number of Samples = 10000
µ = 0.0999ο
s = 0.00201o
Standard Error = 1.0e-4o

2. Orbit Determination and
Consider Covariance Analysis
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
2.1 Orbit Determination with OR.A.SI (1/2)
1. Orbit Determination Module Characteristics
� Utilization of a batch weighted least-square estimator.
� Radiation pressure coefficient Cp and antenna biases for any number of the Earth
stations participating in the localization campaign, can be set as solve-for
parameters (provided that the problem formulation has good observability).
� Process of any kind of combination of tracking (azimuth-elevation) and/or range
measurements acquired from an arbitrary number of Earth stations.
� Flexibility to configure the weighted least-square estimator with suitable choice
of the following parameters :
� Combination of solve-for parameters.
� Two different measurement rejection factors. One for the first number of
iterations and another for the subsequent iterations.
� Maximum global WRMS (Weighted Root Mean Square) of residuals for
measurement rejection.
� Minimum and maximum number of iterations.
� Maximum number of divergent iterations.
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
2.1 Orbit Determination with OR.A.SI (2/2)
2. Output of Orbit Determination
� Quasi-Synchronous, Keplerian and Cartesian form of determined state vector.
� Standard deviation for the Keplerian form of the determined state vector.
� Standard deviation for the Cartesian form of the state vector with respect to the
satellite reference frame.
� Standard deviation of the solve-for parameters.
� Covariance matrix for the Keplerian and Cartesian state vector forms.
� Residual descriptive statistics (mean & standard deviation) for all types of
measurements taken account during the orbit determination process.
� Detection of bad observability with Singular Value Decomposition of the positive
defined matrix from the least squares normal equations and warning in case of an
ill-conditioned matrix (determinant very close to zero).
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
2.2 Example of Orbit Determination with Real Measurements (1/2)
Localization Campaign Characteristics
� Localization measurements were acquired from two antennas :
� Range, azimuth & elevation from Thermopylae station (THP) at Greece.
� Range from Kakoratzia station (CYP) at Cyprus.
� Number of sessions : 28
� Time interval between sessions : 2 hours.
� Solve-for parameters :
� State vector.
� Azimuth and elevation biases for Thermopylae station.
� Range bias for Kakoratzia station.
� Radiation pressure coefficient Cp.
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)

COSMIC Results
State Vector
a = 42166.0066 Km
ex = -0.000139
ey = -0.000239
ix = 0.000185 rad
iy = -0.000832 rad
true longitude = 38.99017o
Antenna Biases
THP2 Az Bias = 0.01833o
THP2 El Bias = -0.01245o
CYP Rg Bias = -0.082 Km
Cp = 0.967
2.2 Example of Orbit Determination with Real Measurements (2/2)
OR.A.SI Results
State Vector
a = 42166.0076 Km
ex = -0.000139
ey = -0.000240
ix = 0.000187 rad
iy = -0.000832 rad
true longitude = 38.99014o
Antenna Biases
THP2 Az Bias = 0.01824o
THP2 El Bias = -0.01290o
CYP Rg Bias = -0.082 Km
Cp = 0.961
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)

Range Residuals for Both Antennas
Why needing consider covariance analysis ?
Methods for handling bias errors in an estimation process
1. Estimated : The state vector is expanded to include dynamic and
measurement model parameters that may be in error.
PROBLEM – Too optimistic covariance matrix in the presence of systematic
no estimated errors.
2. Considered : The state vector is estimated but the uncertainty in the non-
estimated parameter is included in the estimation of the state vector and the
error covariance matrix. This assumes that the no estimated parameters are
constant and their a priori estimate and associated covariance matrix is known.
Consider covariance analysis is a technique to
assess the impact of neglecting to estimate some
parameters on the accuracy of the state estimate
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
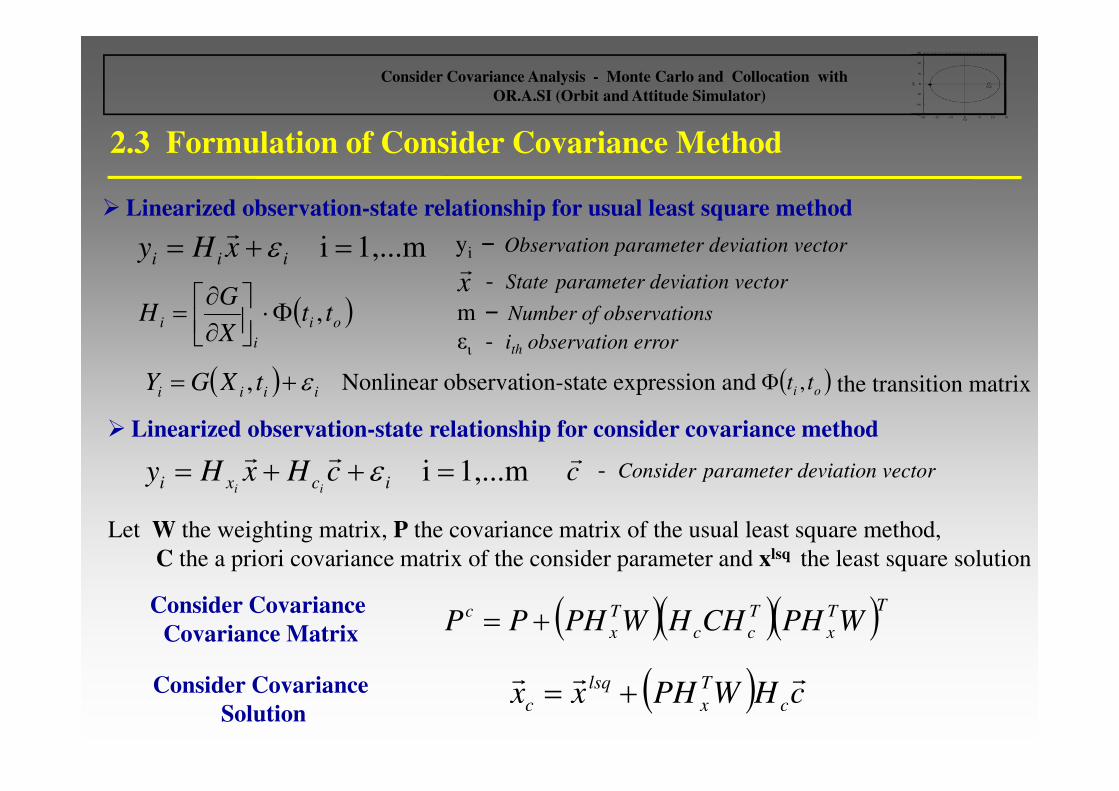
2.3 Formulation of Consider Covariance Method
1,...mi =+= iii xHy εr
� Linearized observation-state relationship for usual least square method
yi – Observation parameter deviation vector
xr
- State parameter deviation vector
m – Number of observations
ει - ith observation error
� Linearized observation-state relationship for consider covariance method
1,...mi =++= icxi cHxHyii
εrr
cr
- Consider parameter deviation vector
Let W the weighting matrix, P the covariance matrix of the usual least square method,
C the a priori covariance matrix of the consider parameter and xlsq the least square solution
( )( )( )TT
x
T
cc
T
x
cWPHCHHWPHPP +=
Consider Covariance
Covariance Matrix
Consider Covariance
Solution( ) cHWPHxx c
T
x
lsq
c
rrr+=
( )oi
i
i ttX
GH ,Φ⋅
∂∂
=
( ) iiii tXGY ε+= , Nonlinear observation-state expression and ( )oi tt ,Φ the transition matrix
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)

Case Studies for Consider Covariance Analysis – GEO Spacecraft at 39o East (1/2)
Antenna Diameter [m] λ [deg] φ [deg] h [m] σρ [m] σΑ,Ε [deg] σ∆ρ [m] σ∆Α,∆Ε [deg]
THP 31 22.68 38.82 70 5 0.003 20 0.004
CYP 4,8 33.384 34.85 215 3 0.02 20 0.03
σR [m] σT [m] σN [m] σVr [m/s] σVt [m/s] σVn [m/s] σa [m]
Noise 75,014 292,233 692,370 0,019 0,005 0,053 11,498
Consider 95,839 994,035 767,935 0,071 0,006 0,054 43,400
0,00049
0,00140
Description (Substantial differences between estimated and consider analysis)
Case A1 One day angle and range measurements (1/2h) from THP Station ; bias parameters considered
σλ [deg]
σR [m] σT [m] σN [m] σVr [m/s] σVt [m/s] σVn [m/s] σa [m]
Noise 76,744 403,478 695,919 0,0276 0,0055 0,0533 16,950
Consider 76,745 673,076 695,919 0,0480 0,0055 0,0533 16,950
0,00062
0,00096
Description (Reduction of the impact of the systematic measurement errors )
Case A2 Same as A1 but with tracking biases estimated
σλ [deg]
Determined State Vector Accuracies with respect to Satellite Reference Frame
σR [m] σT [m] σN [m] σVr [m/s] σVt [m/s] σVn [m/s] σa [m]
Noise 449,689 2008,665 4536,527 0,1357 0,0326 0,3473 27,366
Consider 449,769 2464,346 4537,292 0,1709 0,0326 0,3473 27,368
0,00325
0,00378
Description (Unfavorable tracking geometry and reduced tracking performance )
Case A3 Same as A2 but with CYP Station
σλ [deg]

Case Studies for Consider Covariance Analysis – GEO Spacecraft at 39o East (2/2)
σR [m] σT [m] σN [m] σVr [m/s] σVt [m/s] σVn [m/s] σa [m]
Noise 23,827 79,030 238,741 0,0048 0,0017 0,0187 1,579
Consider 28,333 781,862 241,275 0,0574 0,0019 0,0196 11,968
0,00014
0,00106
Description (Increased accuracy due to double ranging from distant stations )
Case A4 One day ranging (1/2h) from THP and CYP station ; Range biases considered
σλ [deg]
σR [m] σT [m] σN [m] σVr [m/s] σVt [m/s] σVn [m/s] σa [m]
Noise 30,289 301,078 242,589 0,0224 0,0019 0,0201 14,499
Consider 30,290 616,193 242,590 0,0451 0,0019 0,0201 14,500
0,00041
0,00084
Description (Same accuracy as Case A2)
Case A5 One day ranging (1/2h) from THP and CYP station ; CYP range bias estimated
σλ [deg]
σR [m] σT [m] σN [m] σVr [m/s] σVt [m/s] σVn [m/s] σa [m]
Noise 151,366 3494,062 584,922 0,2512 0,0068 0,0800 141,562
Consider 151,366 3535,434 584,922 0,2543 0,0068 0,0800 141,562
0,00482
0,00488
Description (Bud observability due to short data arc )
Case A6 12 hours ranging and tracking measurements (1/30m) from THP ; Tracking biases estimated
σλ [deg]
σR [m] σT [m] σN [m] σVr [m/s] σVt [m/s] σVn [m/s] σa [m]
Noise 159,679 961,330 1782,963 0,0614 0,0121 0,0850 17,040
Consider 160,210 1285,681 1782,995 0,0871 0,0121 0,0850 20,890
0,00127
0,00173
Description (Reasonable accuracy with a very short data arc )
Case A7 6 hours ranging (1/30m) from THP and CYP stations ; Range biases considered
σλ [deg]
FACTS
1. The characteristics and design of a collocation strategy primarily
depends on the desired minimum distance between the spacecrafts.
2. The behavior and the actual accuracy of an orbit determination
estimator depends on the agreement between the assumptions
done for the error statistical behavior and the actual error profile.
3. Maneuver execution errors deteriorate the orbit prediction based
on the pre-maneuver orbit determination.
PROBLEM
How can a Flight Dynamics engineer be sure of the actual worst case
minimum distance between collocated spacecrafts in order to diminish
the possibility of a dangerous close approach.
Solution
Statistical analysis of the results obtained from repeated numerical
simulations of a complete station keeping cycle with orbit determination
and maneuver errors.
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
3. Monte Carlo
and
Orbit Determination
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
3.1 Monte Carlo and Orbit Determination (1/2)
1. Monte Carlo Characteristics
� Production of range, azimuth and elevation measurements having the same
characteristics and capabilities with the Localization Measurements Simulator
module.
� Capability to simulate:
� Single orbit determination.
� A full station keeping cycle comprising two pre-maneuver orbit determinations
and an inclination (South) control maneuver followed by a
longitude/eccentricity (East/West) one.
� Automatic maneuver calculation in accordance to:
� The outcome of the orbit determination based on the pre-maneuver simulated
localization measurements.
� The desired station keeping strategy, orbital location and station keeping
window dimensions.
� Reproduction of maneuver execution errors with Gaussian distribution.
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)

3.1 Monte Carlo and Orbit Determination (2/2)
2. Monte Carlo Module Output
Data produced at the end of every iteration :
� Quasi-Synchronous (a, ex, ey, ix, iy, l) , Keplerian and Cartesian (ECF & ECI) forms
of the determined state vector.
� Mean value and covariance of the aforementioned state vector forms.
� Difference between the actual and the determined orbit in the form of quasi-
synchronous and Cartesian elements with respect to the ECF, ECI and satellite
reference frames.
� Mean value and covariance of the aforementioned differences.
Data produced at the final iteration :
� All the data listed above.
� The covariance matrices for the quasi-synchronous, Keplerian and ECI Cartesian
forms of the determined state vector.
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)

Cross Checking Between Formal Covariances from Orbit Determination and Monte Carlo
Radial σ = 75.21 m
Standard error of σ = 0.84 m
Tangential σ = 292.83 m
Standard Error of σ = 3.29 m
Normal σ = 692.06 m
Standard Error of σ = 7.8 m
• Campaign Characteristics : 13 measurements (1/2h) - Range Noise = 5 m , Azimuth-Elevation Noise = 0.003o
• Formal Standard Deviations
from Orbit Determination :
Radial σ = 75.014 m Along Track σ = 292.233 m Cross Track σ = 692.37 m
Major Semi Axis σ = 11.5 m True Longitude = 0.000488o
Standard Deviations Acquired from Monte Carlo Descriptive Statistics (3792 samples)
• Orbit Determination Setup : Cp and antenna biases considered
Major Semi Axis σ = 11.7 m True Longitude σ = 0.000402o
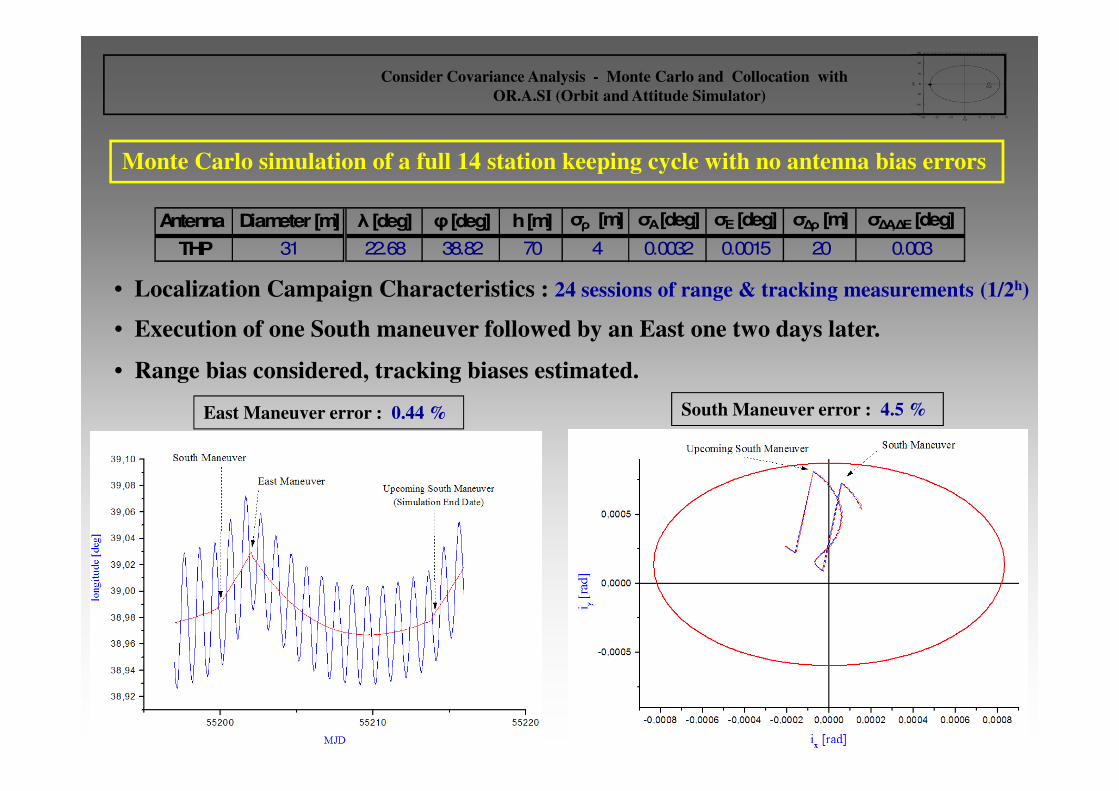
Monte Carlo simulation of a full 14 station keeping cycle with no antenna bias errors
• Localization Campaign Characteristics : 24 sessions of range & tracking measurements (1/2h)
South Maneuver error : 4.5 % East Maneuver error : 0.44 %
Antenna Diameter [m] λ [deg] φ [deg] h [m] σρ [m] σΑ [deg] σΕ [deg] σ∆ρ [m] σ∆Α,∆Ε [deg]
THP 31 22.68 38.82 70 4 0.0032 0.0015 20 0.003
• Execution of one South maneuver followed by an East one two days later.
• Range bias considered, tracking biases estimated.
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)

Error Ellipsoid With Respect to Satellite Reference Frame
Figure 1 : Radial error with respect to tangential error
Figure 2 : 3D Scatter plot of radial, tangential and normal errors
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)

Descriptive Statistics of Monte Carlo Results
Radial 3σ = 96 m
Standard error of 3σ = 1.2 m
Tangential 3σ = 4740 m
Standard Error of 3σ = 60 m
Normal 3σ = 909 m
Standard Error of 3σ = 11.5 m
3σ Errors for the Adapted Form of the Determined State Vector
a = 42 m ex = ey= 2·10-6 ix = iy= 1.2·10-5 rad true longitude = 0.00665o
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)

4. Collocation Initialization
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
4.1 Characteristics of Collocation Initialization
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
� Computation of the initial state vector corresponding to one of the following modes of
collocation:
� Mode 1 : Complete longitude separation.
� Mode 2 : Longitude separation during drift cycle.
� Mode 3 : Longitude separation during eccentricity libration.
� Mode 4 : In-plane separation by eccentricity.
� Mode 5 : Inclination-eccentricity separation.
� Collocation characteristics computed in accordance to the user defined parameters:
• Epoch of collocation initialization
• Collocation mode.
• Minimum inter-satellite distance.
• Number of collocated spacecrafts.
• Maximum eccentricity.
• Eccentricity tolerance.
• Maximum allowable latitude.
• Station keeping cycle duration.
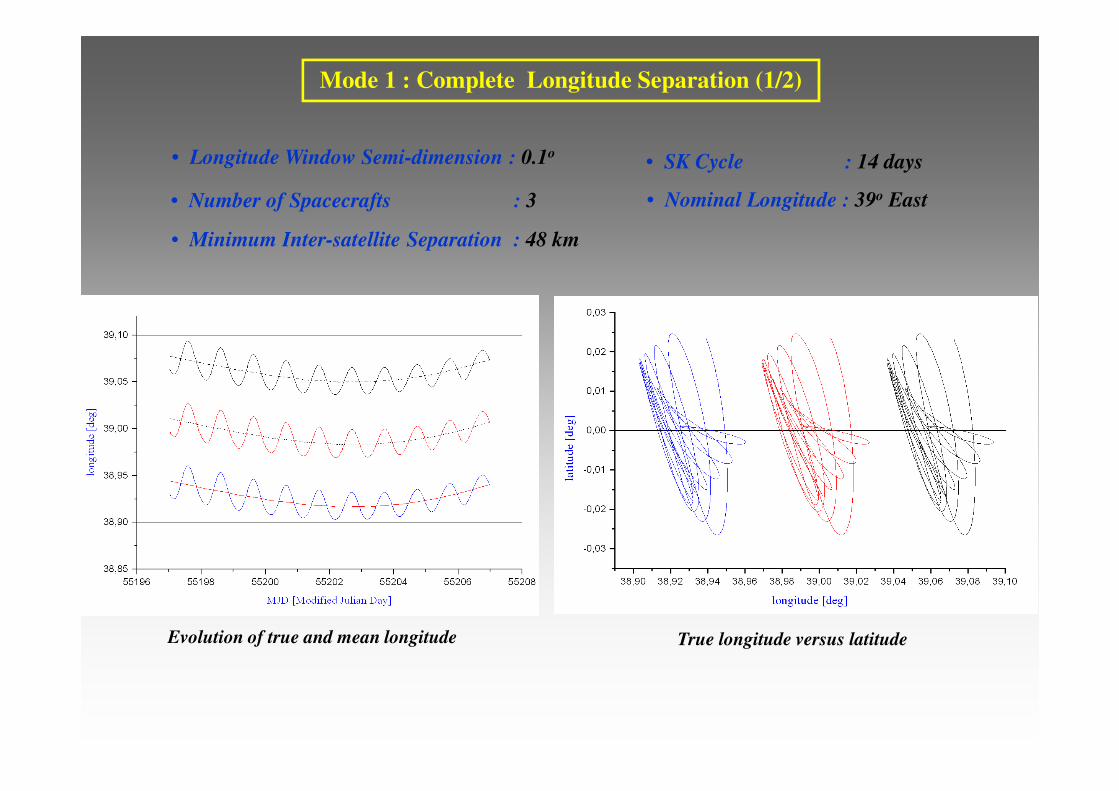
Mode 1 : Complete Longitude Separation (1/2)
• Number of Spacecrafts : 3
• SK Cycle : 14 days
• Minimum Inter-satellite Separation : 48 km
• Nominal Longitude : 39o East
• Longitude Window Semi-dimension : 0.1o
Evolution of true and mean longitude True longitude versus latitude

Mode 1 : Complete Longitude Separation (2/2)
Inter-satellite distance evolution Along track versus radial separation
Topocentric and geocentric angular separation

Mode 2 : Longitude Separation During Drift Cycle
• Number of Spacecrafts : 5
• SK Cycle : 14 days
• Minimum Inter-satellite Separation : 25 km
• Nominal Longitude : 39o East
• Longitude Window Semi-dimension : 0.1o
Evolution of true and mean longitude Inter-satellite distance evolution
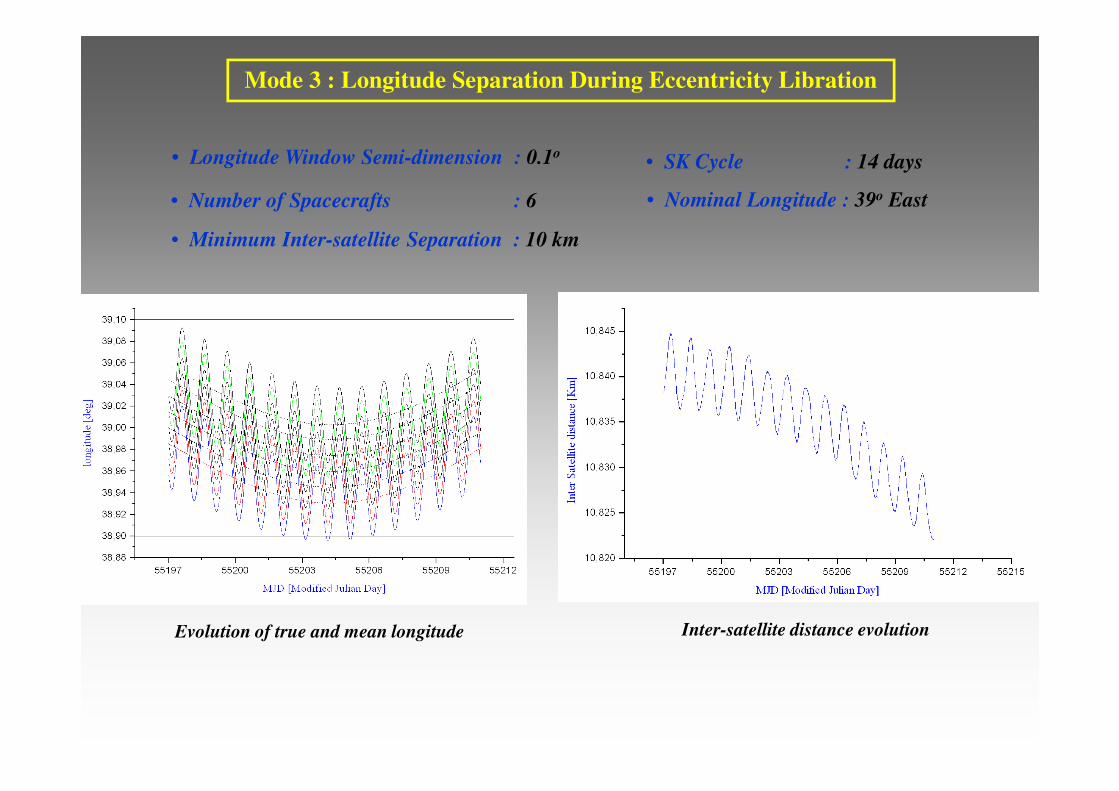
Mode 3 : Longitude Separation During Eccentricity Libration
• Number of Spacecrafts : 6
• SK Cycle : 14 days
• Minimum Inter-satellite Separation : 10 km
• Nominal Longitude : 39o East
• Longitude Window Semi-dimension : 0.1o
Inter-satellite distance evolution Evolution of true and mean longitude
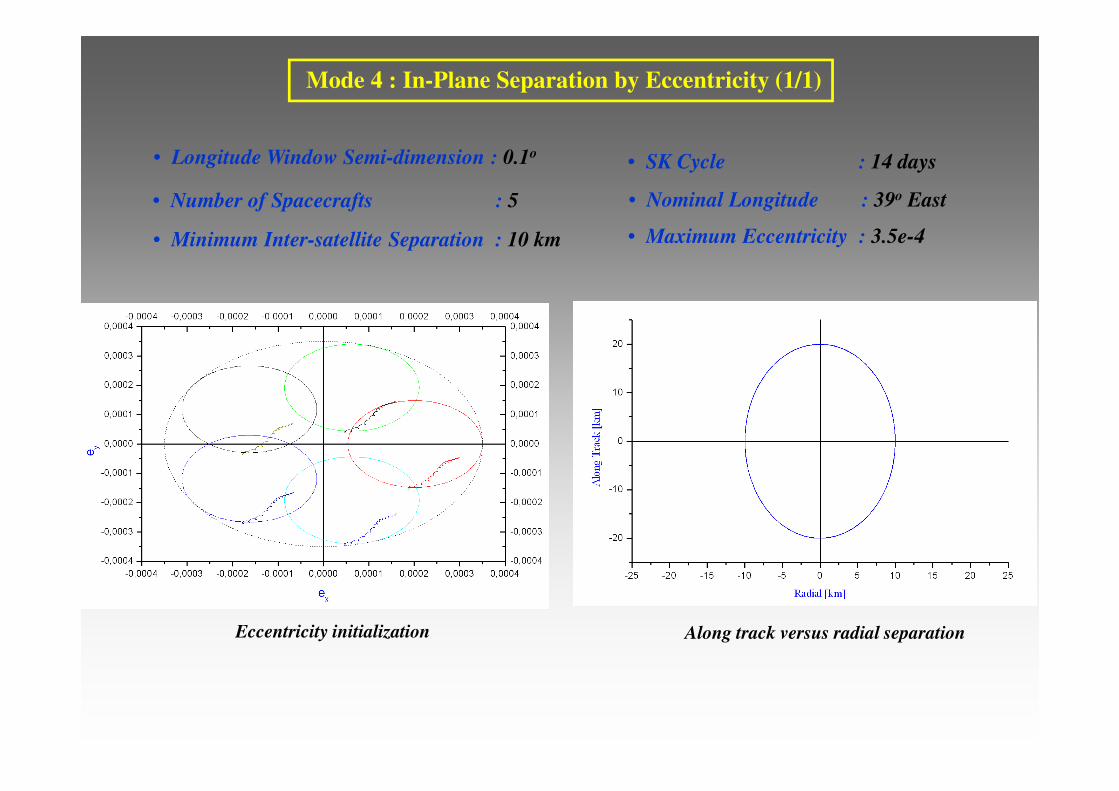
Mode 4 : In-Plane Separation by Eccentricity (1/1)
• Number of Spacecrafts : 5
• SK Cycle : 14 days
• Minimum Inter-satellite Separation : 10 km
• Nominal Longitude : 39o East
• Longitude Window Semi-dimension : 0.1o
• Maximum Eccentricity : 3.5e-4
Eccentricity initialization Along track versus radial separation
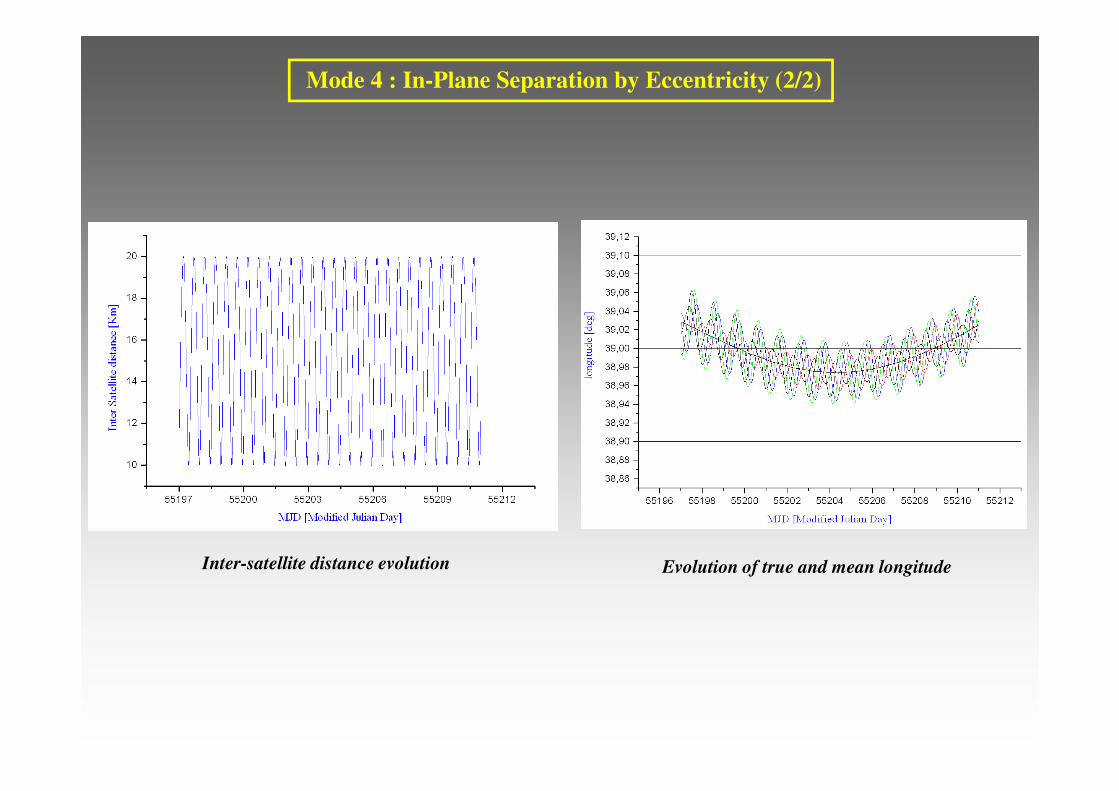
Mode 4 : In-Plane Separation by Eccentricity (2/2)
Inter-satellite distance evolution Evolution of true and mean longitude
5. Collocation Mission Analysis
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
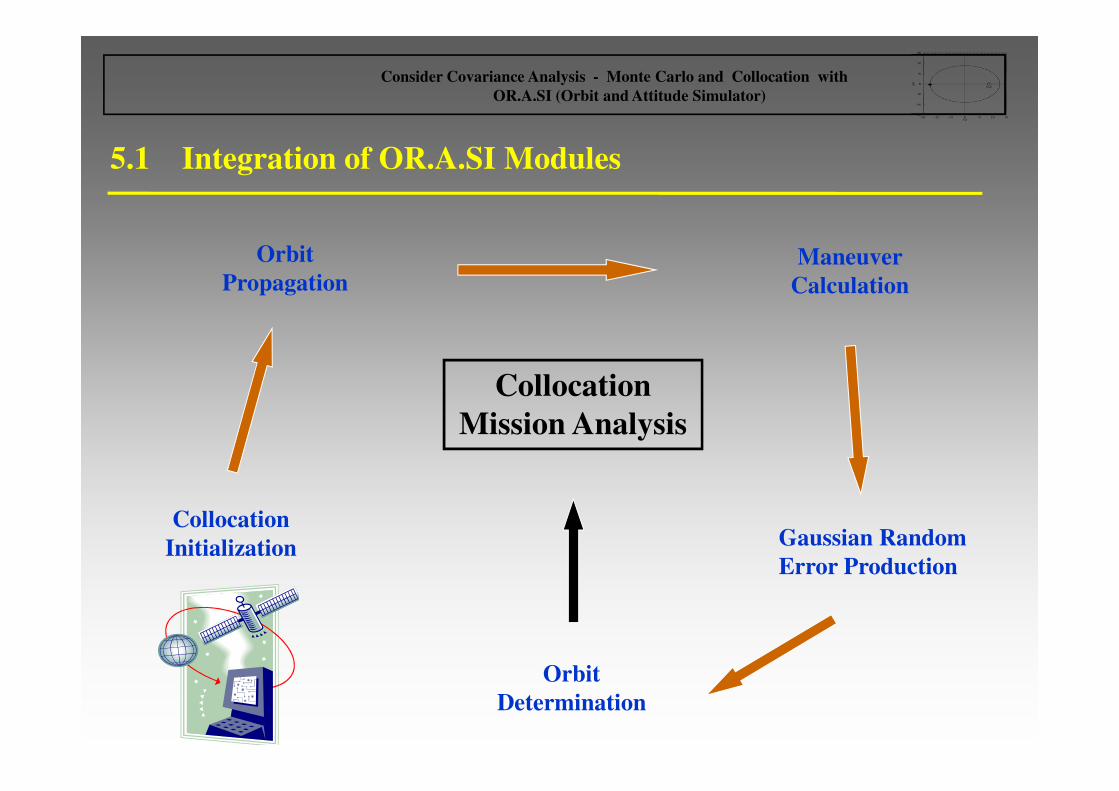
Orbit
PropagationManeuver
Calculation
Gaussian Random
Error Production
Collocation
Initialization
Orbit
Determination
Collocation
Mission Analysis
5.1 Integration of OR.A.SI Modules

5.2 Characteristics of Collocation Mission Analysis
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
� Initial state vector computation for each spacecraft of the collocation cluster.
� Orbit propagation.
� Production of localization measurements with Gaussian distributed errors.
� Orbit determination based on erroneous measurement production.
� Maneuver calculation based on the outcome of the orbit determination.
� Addition of maneuver execution errors.
For each pair of the collocated spacecrafts:
� Inter-satellite distance.
� Inter-satellite radial separation.
� Inter-satellite along track separation.
� Inter-satellite cross track separation.
� Inter-satellite geocentric angular separation.
� Inter-satellite angular separation with respect to a user defined Earth station.
� Eccentricity separation.
� Inclination separation.
� Angle between inter-satellite eccentricity-inclination node vectors.
� Relative velocity.

Mode 5 : Inclination-Eccentricity Separation
Desired Characteristics for Collocated Spacecrafts
• Number of spacecrafts : 3
• Minimum distance : 15 km
• Station keeping cycle : 14 days
• Nominal longitude : 39.0o East
• Longitude window semi-dimension : 0.09o
• Maximum eccentricity : 4.0e-4
• Maximum latitude : 0.05o
• Eccentricity tolerance : 5.0e-5
0
0372785.0
000355735.0
o
rrr
r
r
=×
=
=
ie
i
e
δδ
δ
δ
Separation Parameters
Initial Mean State Vectors for Epoch 01/01/2010 00:00:00
Spacecraft No.01
a = 42166.7 km
ex = 0.000203282
ey = -0.000194605
ix = 0.000750096 rad
iy = -0.000532513 rad
true longitude = 39.0292o
Spacecraft No.02
a = 42166.7 km
ex = -0.000104793
ey = -0.000372472
ix = 0.000199829 rad
iy = -0.000880893 rad
true longitude = 39.0292o
Spacecraft No.03
a = 42166.7 km
ex = -0.000104793
ey = -0.0000167378
ix = 0.000174304 rad
iy = -0.000228857 rad
true longitude = 39.0292o
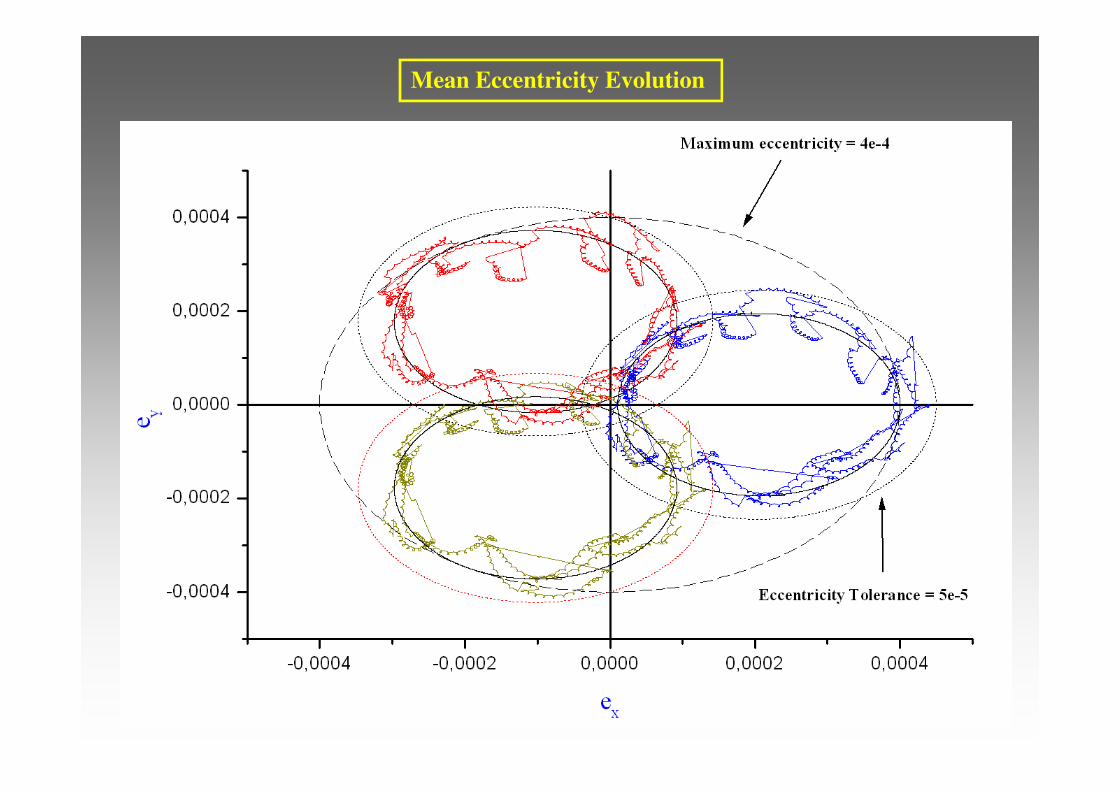
Mean Eccentricity Evolution

Mean Inclination Evolution

Inter-satellite Separation with respect to Satellite Reference Frame
Cross track versus radial separation
Along track versus radial separation

Inter-satellite Linear and Angular Separation
Inter-satellite distance evolution
Inter-satellite topocentric angular separation evolution

True Longitude and Osculating Eccentricity Evolution
True longitude evolution
Osculating eccentricity vector evolution

6. Future Plans for Further
Code Development
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)

6.1 Future Plans for Further Code Development (1/2)
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
� Incorporation of maneuver velocity components as estimated parameters in orbit
determination.
� Production of more realistic simulated localization measurement sessions comprising
lots of raw measurements which are subsequently post-processed in the form of one
condensed measurement.
� Simulation of more realistic measurement and maneuver errors with the
implementation of random number generators characterized from probability
densities other than the Gaussian one.
� Detection of RF signal blockage and infrared sensor shadowing between collocated
spacecrafts.
� Adaptation of eccentricity-inclination separation collocation strategy parameters to
represent angles of inter-satellite eccentricity-inclination node vectors, different than
0o in order to decrease the possibility of mutual RF signal or infrared sensor
shadowing.
� Statistical risk assessment for collocated spacecraft collision, RF signal and infrared
sensor shadowing with the integration of the Monte Carlo and the collocation mission
analysis modules.
� Computation of inclination control maneuvers with the optimized long term control
strategy.
� Description of a realistic model for the atmosphere up to the height of 1000 Km in
order to take account the air drug perturbation for LEO calculations (Jacchia
model).
� Orbit determination based on Kalman filter sequential estimator.
Consider Covariance Analysis - Monte Carlo and Collocation with
OR.A.SI (Orbit and Attitude Simulator)
6.1 Future Plans for Further Code Development (2/2)

THANK YOU FOR ATTENDING MY PRESENTATION