powerbot group #2: tarik ait el fkih luke cremerius marcel michael jerald slatko sponsored by:...
TRANSCRIPT

PowerBotGroup #2:Tarik Ait El FkihLuke CremeriusMarcel MichaelJerald Slatko
Sponsored By: Aeronix, Inc.

Project Description
Autonomous robot purposed to provide supplemental power to mobile devices (laptops, mobile phones, etc.).
Uses onboard navigation algorithms to navigate to user’s location.
Incorporates an iOS application to provide robot statistics and manual control.

Project Motivation
Battery life longevity in mobile devices is a constant issue.
Wanted to create a charging solution that could charge the device without inconveniencing the user.
The device would be simple to use, allowing for easy adoption into a users everyday routine.

Objectives
PowerBot should be able to navigate autonomously to a user’s location.
PowerBot should be able to be remotely controlled by the user through the use of an onboard camera and the provided iOS application.
PowerBot will contain a battery used to charge external devices through the use of inductive and USB interfaces.
Specifications
Will be at most 36” long
Max speed of 5 mph
Battery life of minimum 24 hours
Ability to provide charge to mobile devices 100% of the time.

Switching Voltage Regulators
Needed to regulate power to the different systems in PowerBot.
Highly efficient when compared to linear voltage regulators; 14-40% vs. 85-90%.

Inductive Charging
9 V switching regulator: LT1424-9
Used to step down voltage for charging mat.
SO-8 package.
Charging mat offers a degree of flexibility due to lack of wires.
Inductive cases are needed unless implemented (Qi) by manufacturer.

USB Charging
5 V switching regulator: DE-SW050
Used to step down voltage for USB charging.
Pin-compatible with 78XX family (TO-220 package) of linear voltage regulators.
USB, although wired, is, well, universal.
Microcontroller Supply
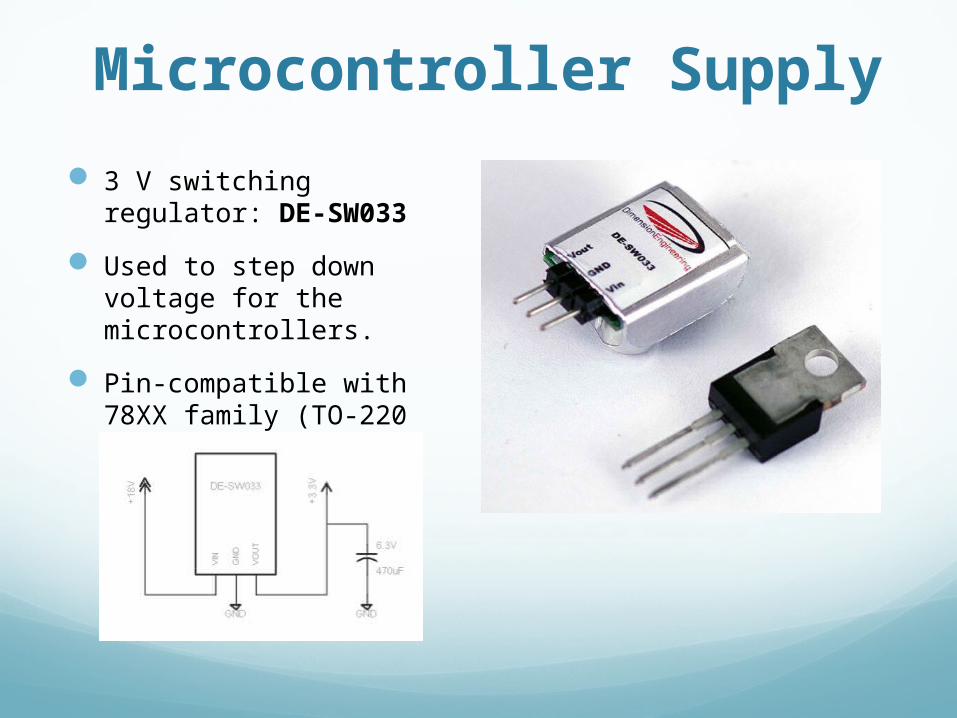
3 V switching regulator: DE-SW033
Used to step down voltage for the microcontrollers.
Pin-compatible with 78XX family (TO-220 package) of linear voltage regulators.

Motors
Stepper Motor:To be used to rotate (Θ-axis) the solar panel.
Brushed DC Motor:To be used to drive the rear wheels.
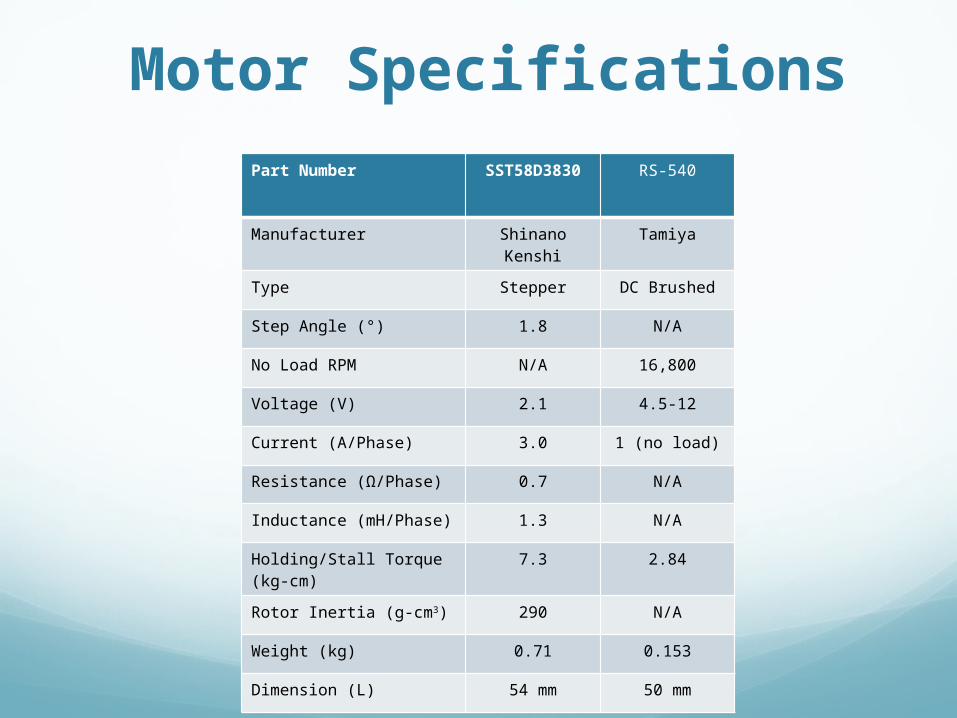
Motor SpecificationsPart Number SST58D3830 RS-540
Manufacturer Shinano Kenshi
Tamiya
Type Stepper DC Brushed
Step Angle (°) 1.8 N/A
No Load RPM N/A 16,800
Voltage (V) 2.1 4.5-12
Current (A/Phase) 3.0 1 (no load)
Resistance (Ω/Phase) 0.7 N/A
Inductance (mH/Phase) 1.3 N/A
Holding/Stall Torque (kg-cm)
7.3 2.84
Rotor Inertia (g-cm3) 290 N/A
Weight (kg) 0.71 0.153
Dimension (L) 54 mm 50 mm

Motor Controllers
MSP430F123 will be used to control the solar panel [stepper] motor.
Contains hardware UART for serial communications.

Motor Controllers
MSP430F2616 will be used to control the DC brushed motor.
Its features: Interfaces with UART. 16 MHz with 4 kB of RAM
and 92 kB of flash memory.
48 GPIOs. ADC resolution of 12 bits
with 8 channels.
R/C Car Chassis
Somewhat standard over-the-counter licensed R/C car.
Large wheels allow for maneuverability.

Chassis Modifications
Swap out the drive motor to (DC Brushed).
Remove the [red] plastic body frame and create a foundation for PowerBot.

Obstacle Avoidance Obstacles will be detected using ultrasonic ranging
sensors
As PowerBot moves, the ultrasonic sensors rapidly take readings to gather range data in real time.
The obstacle avoidance algorithm will maneuver PowerBot in response to the presence of obstacles.
Three modes of operation: Active Adjustment (AA) Reverse-Reset (RR) Off
Obstacle avoidance is OFF by default. It must be enabled by the iPhone user

Modes of OperationActive Adjustment (AA)
Primary mode of operation
Front two ultrasonic sensors are active
A range reading within the AA minimum distance causes PowerBot to steer either left or right to avoid it.
PowerBot will attempt to re-align

Ultrasonic SensorsLV-MaxSonar® – EZ0™
Operates at 2.5 V – 5.5 V
Avg. current draw: 2 mA
Min. Distance: 6 in. Obstacles closer than 6 in. give
reading of 6 in.
Max. Distance: 254 in. (21 ft.)
1 inch Resolution
Range readings can be taken at about 20 Hz, every 50 ms.
Output modes include: Analog
Pulse Width
UART (not quite RS-232)
Image Credit: www.maxbotix.com

PIC32 Microcontroller
PIC32 family of microcontrollers was chosen to drive PowerBots navigation and Wi-Fi communication functions.
The PIC32 features an 80 MHz clock with onboard 512 kB of flash and 128 kB of RAM.
Model Number: PIC32MX695F512H
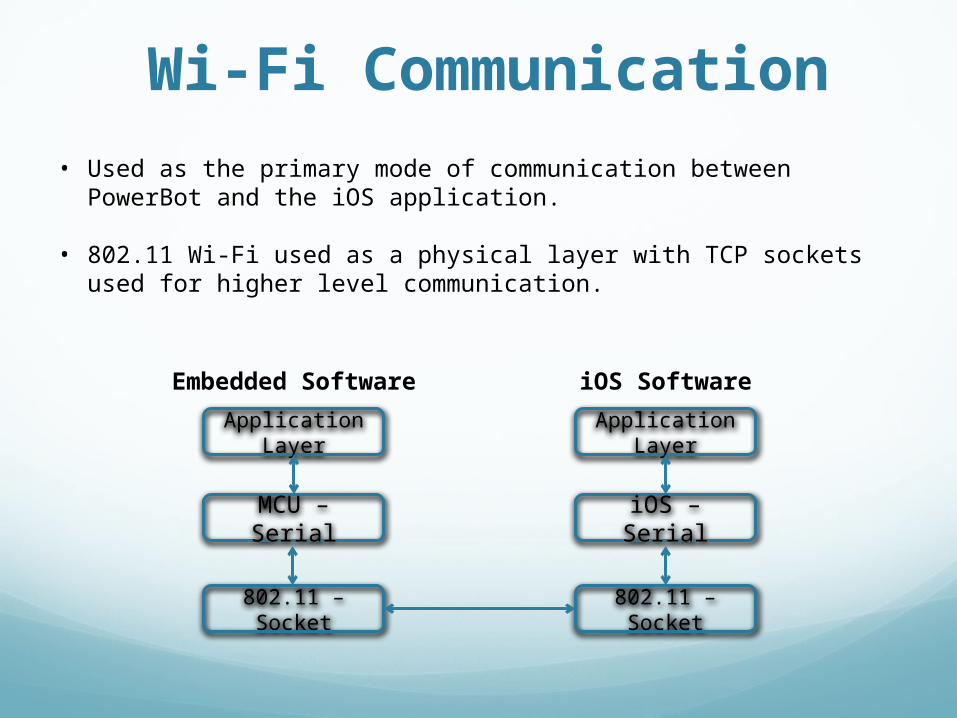
Wi-Fi Communication• Used as the primary mode of communication between PowerBot
and the iOS application.
• 802.11 Wi-Fi used as a physical layer with TCP sockets used for higher level communication.
Application Layer
MCU – Serial
802.11 – Socket
iOS – Serial
802.11 – Socket
Application Layer
Embedded Software
iOS Software
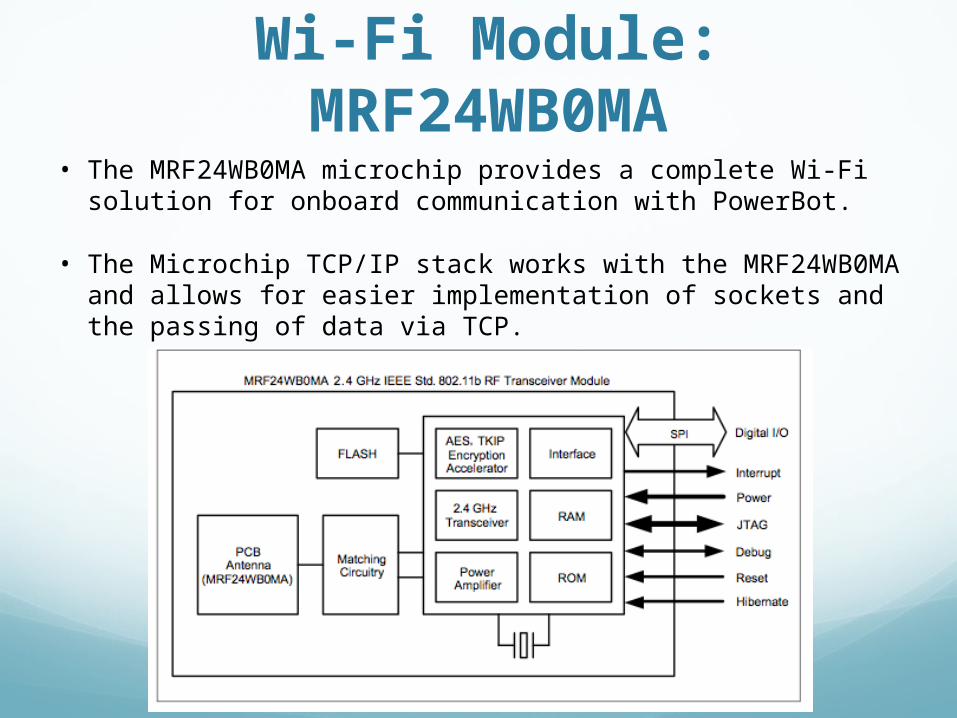
Wi-Fi Module: MRF24WB0MA
• The MRF24WB0MA microchip provides a complete Wi-Fi solution for onboard communication with PowerBot.
• The Microchip TCP/IP stack works with the MRF24WB0MA and allows for easier implementation of sockets and the passing of data via TCP.
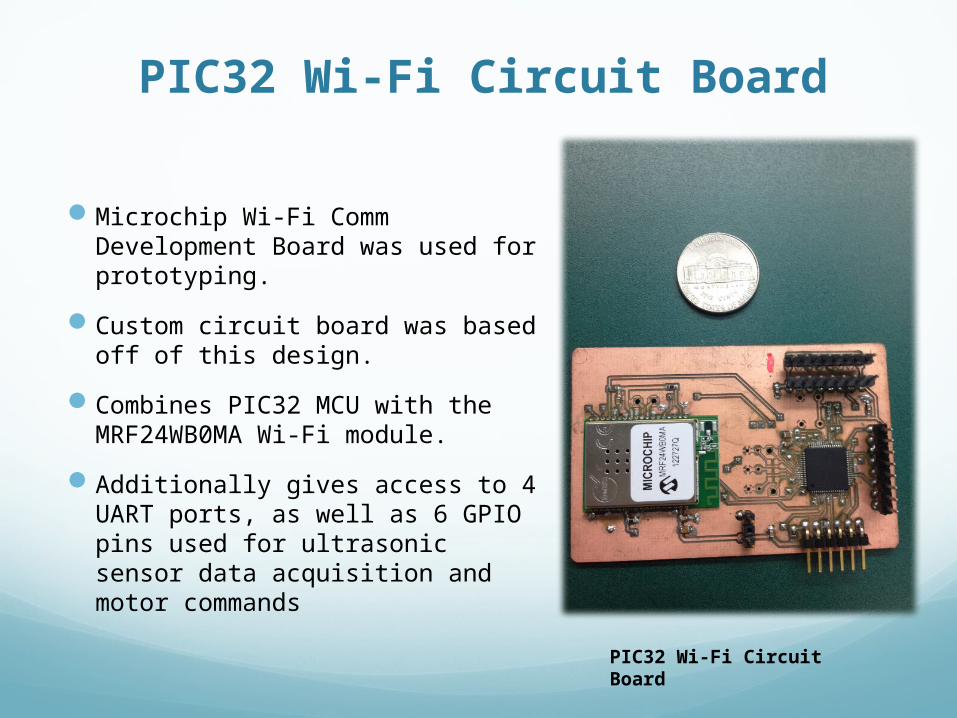
PIC32 Wi-Fi Circuit Board
Microchip Wi-Fi Comm Development Board was used for prototyping.
Custom circuit board was based off of this design.
Combines PIC32 MCU with the MRF24WB0MA Wi-Fi module.
Additionally gives access to 4 UART ports, as well as 6 GPIO pins used for ultrasonic sensor data acquisition and motor commands
PIC32 Wi-Fi Circuit Board
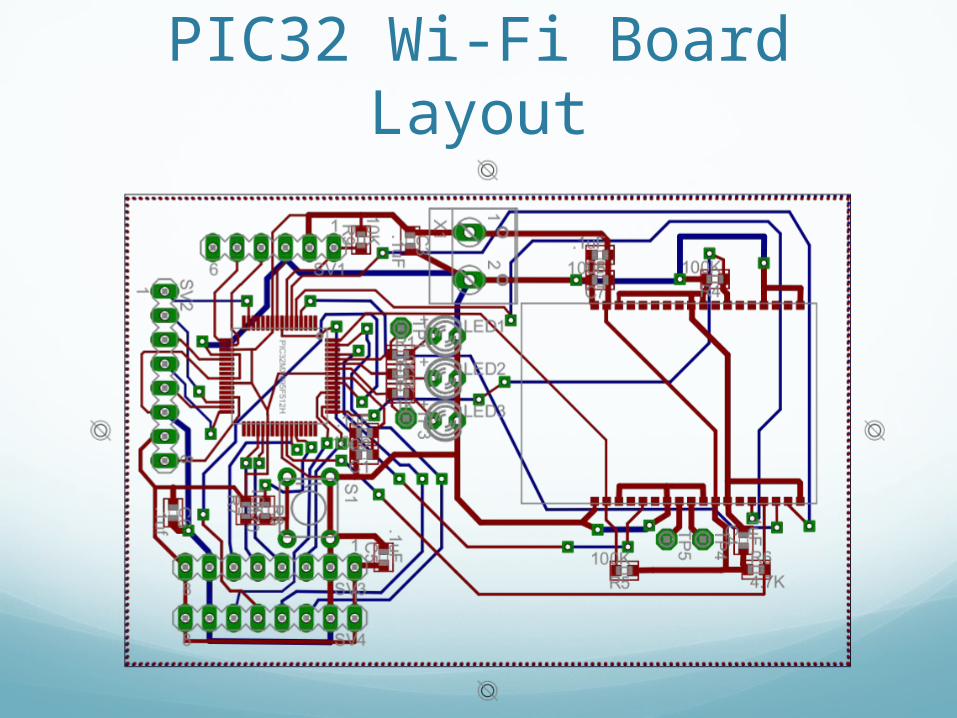
PIC32 Wi-Fi Board Layout
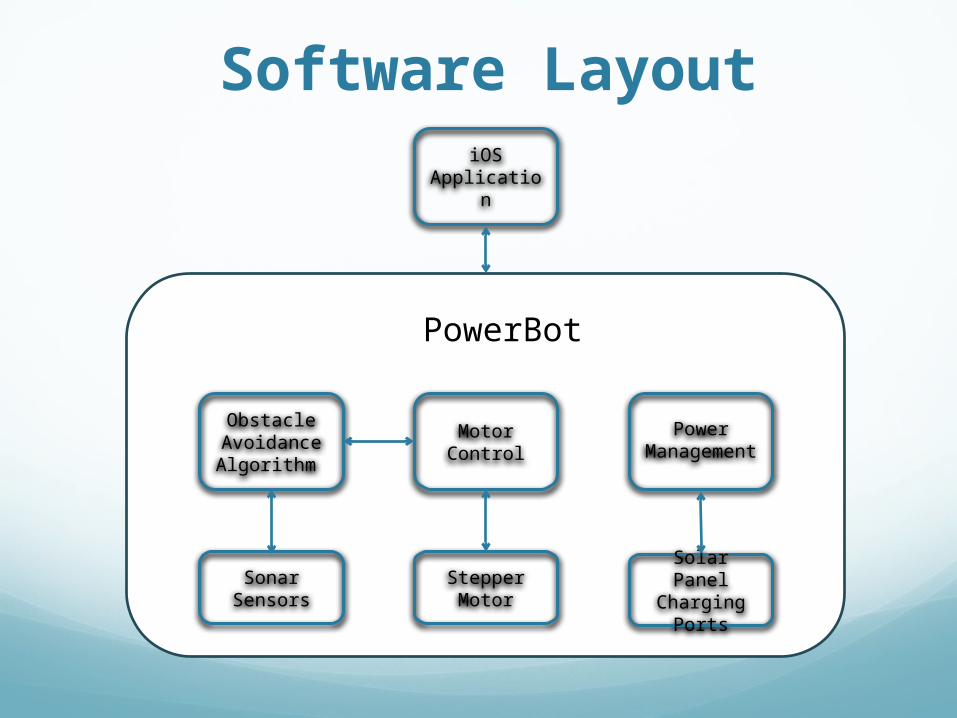
iOS Application
Obstacle AvoidanceAlgorithm
Motor Control
Power Manageme
nt
PowerBot
Sonar Sensors
Stepper Motor
Solar PanelCharging
Ports
Software Layout
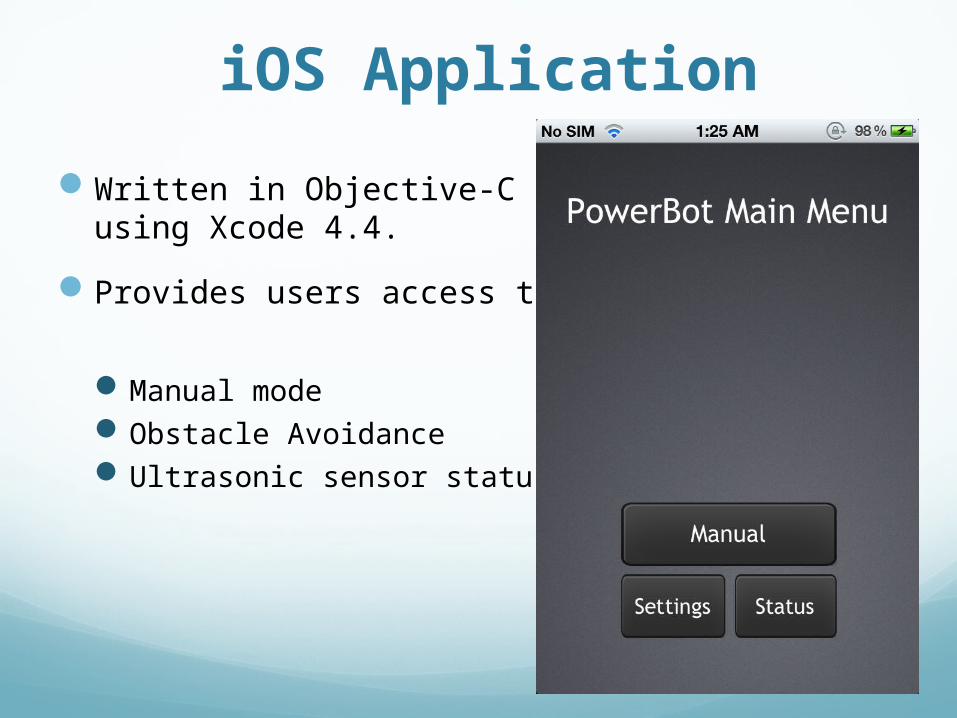
iOS Application
Written in Objective-C using Xcode 4.4.
Provides users access to:
Manual mode Obstacle AvoidanceUltrasonic sensor status

Manual Control
Gives the user manual controls to drive PowerBot.
Sensor icons blink when currently taking distance readings.
Status of Wi-Fi connection shown above robot controls.

System Status
Shows the user the current sensor status of PowerBot.
Displays the onboard sensor distance readings
Shows the number of readings received from each sensor
I/O Data button allows viewing all incoming TCP data

System Settings
Allows the user to open a socket connection to PowerBot once the user has joined the ad-hoc network PowerBot broadcasts.
Toggle button for turning obstacle avoidance on or off.

Power

Battery Requirements
24 V battery
At least 2 Ah
Deep cycle for increased usage time
Low internal resistance
Flat discharge rate
Lightweight
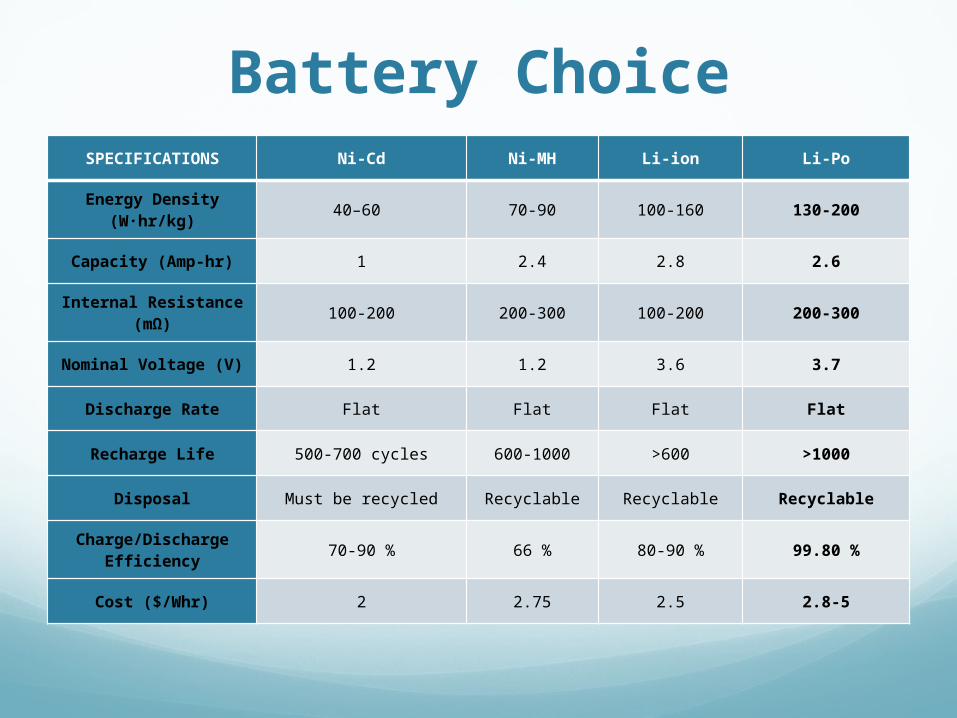
SPECIFICATIONS Ni-Cd Ni-MH Li-ion Li-Po
Energy Density (W·hr/kg) 40–60 70-90 100-160 130-200
Capacity (Amp-hr) 1 2.4 2.8 2.6
Internal Resistance (mΩ) 100-200 200-300 100-200 200-300
Nominal Voltage (V) 1.2 1.2 3.6 3.7
Discharge Rate Flat Flat Flat Flat
Recharge Life 500-700 cycles 600-1000 >600 >1000
Disposal Must be recycled Recyclable Recyclable Recyclable
Charge/Discharge Efficiency
70-90 % 66 % 80-90 % 99.80 %
Cost ($/Whr) 2 2.75 2.5 2.8-5
Battery Choice

Lithium Polymer Battery
Polymer Li-Ion Battery
18650 cell type14.8 V (working)16.8 V (peak)2.2 Ah 32.56 Wh
Reasons for choosing:• High energy density (Wh/kg)• High energy/dollar (Wh/$)

Alternative Power Source
Power outlet:“Unlimited” powerQuick charging of the battery
Solar panel:Environmental ImpactFinancial BenefitsEnergy Independence

Solar Panels Specifications
Monocrystalline Polycrystalline Thin film
Power 10 W 10 W 10 W
Open Circuit voltage 21.5 21.4 24.2
Short Circuit Current 0.64 0.68 0.84
Maximum Power Voltage 17.5 16.8 17.3
Maximum Power Current 0.57 0.6 0.64
Efficiency 15 % 12.5 % 6.3 %
Cost/W 10-11 8.5-9.5 10
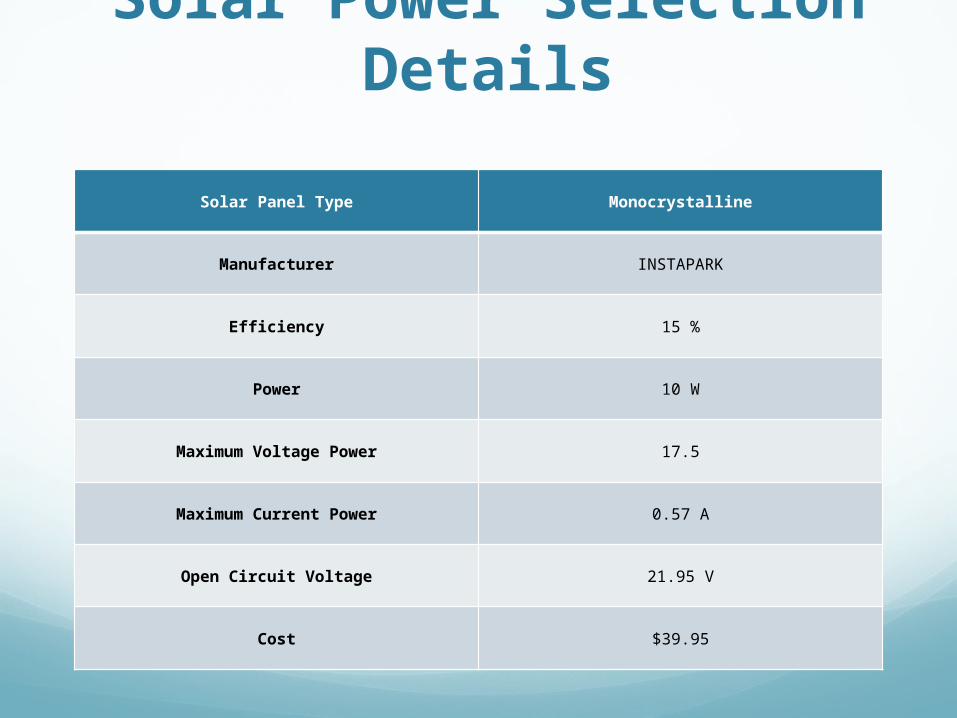
Solar Power Selection Details
Solar Panel Type Monocrystalline
Manufacturer INSTAPARK
Efficiency 15 %
Power 10 W
Maximum Voltage Power 17.5
Maximum Current Power 0.57 A
Open Circuit Voltage 21.95 V
Cost $39.95

Output Efficiency
Increasing the output efficiency of the panel:
Increase panel size
Implement tracking system
Single axis
Dual axis

Single Axis Control System
Ambient Light
Photoresistor
MSP430 Longitude Orientation

Dual Axis Control System
Ambient Light
Photoresistor MSP430
Latitude Orientation
Longitude Orientation

Compare and Contrast
Dual axis control system would require more maintenance.
There’s an extra cost involved in utilizing an extra motor or actuator.
Increased complexity.
6% extra efficiency compared to a single axis control system; not worth it.

Solar Panel Implementation
Free rotation of theta ( angle.
Phi ( is fixed in single axis system.
Optimal angle of phi ( is 15°.

BudgetPart Cost Quantity Total Cost
RC Car Chassis
$50 1 $50
Motors
Solar Panel $40 1 $40
Inductive Charger
$40 1 $40
Battery $105 2 $210
Dev Board $50 1 $50
PICKit 3 $50 1 $50
Sonar Sensors
$30 10 $300
Circuit Component
s
Total ~$550

Distribution of Labor
Tarik
Luke
Marcel
Jerald
Solar Panel 80% 5% 10% 5%
MCU Software 25% 25% 25% 25%
Robot Construction
10% 5% 80% 5%
Wireless Design 5% 70% 5% 20%
Navigation/AI 5% 20% 5% 70%

Concerns
Ability to accurately depict a global map and link it to PowerBot’s local map.
Ability to correctly implement EERUF.
Ability for PowerBot to become unstuck in a trap situation.
Questions?