potential impact of hf radar and gliders on ocean forecast system
DESCRIPTION
Potential impact of HF radar and gliders on ocean forecast system. Peter Oke June 2009 CSIRO Marine and Atmospheric Research Centre for Australian Weather and Climate Research. Talk Outline. NSW node of the Australian Integrated Marine Observing System Method - PowerPoint PPT PresentationTRANSCRIPT
www.cmar.csiro.au/bluelink/
Potential impact of HF radar and gliders on ocean forecast system
Peter OkeJune 2009CSIRO Marine and Atmospheric ResearchCentre for Australian Weather and Climate Research

Talk Outline
• NSW node of the Australian Integrated Marine Observing System
• Method
• Assessment of Bluelink background and analysis error estimates
• Estimation of likely analysis estimates with new observations
• Summary & conclusions

Australian Integrated Marine Observing System: NSW node
xx
xx
HFradar
X X - mooring
glider
approved
wish-list
xxxx
xx

The Bluelink System
Ocean Model•OFAM
•MOM4p0d
•Global model
•10 m vert res over top 200 m
Data Assimilation•BODAS
•EnOI
•120 member ensemble
•Localised covariances
•Assimilates along-track ALTIM, coastal SLA, SST & in situ T and S1/101/10oo 9/109/10oo 22oo

Method
To assimilate observations we must estimate: the background error covariance (Pb) … errors in the model the observation operator (H) … where & what the obs are the observation error covariance (R) … errors in the obs
Given this information we can estimate: the analysis error covariance (Pa) … errors in the analysis
Pa = [I – Pb HT (HPb HT + R)-1 H] Pb
Bluelink uses an static ensemble, A = [a1 a2 … an], to approximate Pb = A AT / (n-1).
The background ensemble A, with covariance Pb, can be efficiently transformed into the analysis ensemble Aa, with covariance Pa, using a transformation from ensemble square root filter theory.
This is most efficiently done serially – one observation at a time.

Assumed observation errors, R
… includes instrument + representation error.

Experiments
We consider cases with:
•GOOS + new platform
•just new platform
•just GOOS
Where the GOOS is assumed to be altimeters + SST + Argo/XBT

Impact of sampling error – varying obs distribution
Data distribution impacts the results – so we perform each calculation using the distribution of atSLA, SST and T/S
from the GOOS for each week of 2006.
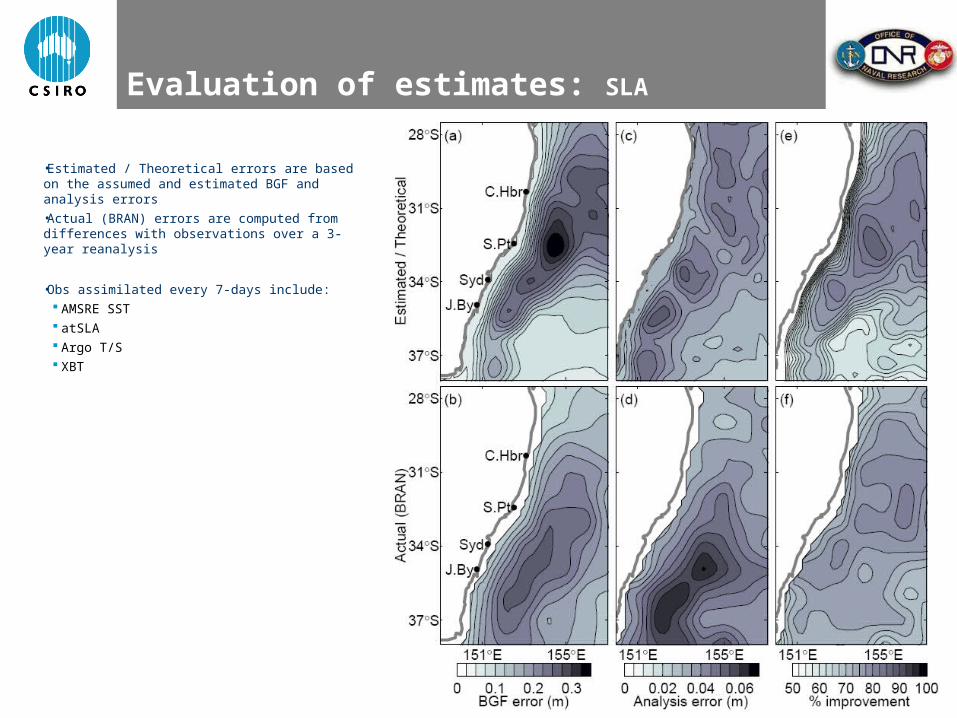
Evaluation of estimates: SLA
•Estimated / Theoretical errors are based on the assumed and estimated BGF and analysis errors
•Actual (BRAN) errors are computed from differences with observations over a 3-year reanalysis
•Obs assimilated every 7-days include: AMSRE SST atSLA Argo T/S XBT

Assumed BGF errors and estimates analysis errors for all variables

Estimates % improvements for different HF radar arrays
HF radar + GOOS
% error reduction relative to GOOS with
only ALTIM+SST+Argo
HF radars are assumed to measure daily-mean surface velocity every day with no data gaps.

Estimates % improvements for different glider sections (or CTD or mooring lines)
Gliders + GOOS
% error reduction relative to GOOS with
only ALTIM+SST+Argo
Gliders are assumed to “fly” along a fixed
latitude within 200 km of the coast with a repeat cycles of 2-
weeks.
Actual glider path … not exactly the
same as the assumed E-W
tracks.

Comparison of different options: showing analysis errors averaged over local regions

Conclusions
HF radar obs may reduce U/V errors by as much as 80%; and T/S and sea-level errors by ~60% near the observed regions.
T and S obs near the shelf are likely to provide a more modest benefit … because they are somewhat redundant. assumed glider tracks are clearly unrealistic – and are more
akin to repeat ship-borne CTD sections.
As a result of this study Bluelink will likely develop the capability to assimilate HF radar data (initially in research mode) once data is available – but will likely retain glider observations for validation.
Sakov, P., and P. R. Oke 2008: Objective array design: Application to the tropical Indian Ocean. Journal of Atmospheric and Oceanic Technology, 25, 794-807.
Oke, P. R., P. Sakov and E. Schulz, 2009: A comparison of shelf observation platforms for assimilation into an eddy-resolving ocean model. Dynamics of Atmospheres and Oceans, in press.

END

Evaluation of estimates: SST
•Estimated / Theoretical errors are based on the assumed and estimated BGF and analysis errors
•Actual (BRAN) errors are computed from differences with observations over a 3-year reanalysis
•Obs assimilated every 7-days include: AMSRE SST atSLA Argo T/S XBT
