potential games, congestion games computational game theory spring 2010 adapting slides by michal...
Post on 21-Dec-2015
215 views
TRANSCRIPT

Potential games, Congestion gamesComputational game theory
Spring 2010
Adapting slides by Michal Feldman
Potential games
• Definition: a game is an ordinal potential game if there exists :S1×…×Sn R, s.t. i,si,s-i,si’,ci(si,s-i) > ci(si’,s-i) IFF (si,s-i) > (si’,s-i)
• Note: G is an exact potential game if ci(si,s-i) - ci(si’,s-i) = (si,s-i) - (si’,s-i)
• Example: max-cut is an exact potential game, where is the cut size– Unfortunately, is not always so natural

Potential games• Lemma: a game is a potential game IFF local
improvements always terminate• proof:
– Define a directed graph with a node for each possible pure strategy profile
– Directed edge (u,v) means v (which differs from u only in the strategy of a single player, i) is a (strictly) better action for i, given the strategies of the other players
– A potential function exists IFF graph does not contains cycles• If cycle exists, no potential function; e.g., (a,b,c,a) means
f(a)<f(b)<f(c)<f(a)• If no cycles exist, can easily define a ordinal potential function WHY?

Examples direction of local improvement
-1,11,-1
1,-1-1,1
3,30,5
5,01,1
2,20,0
0,03,3
Matching penniesPrisoner’s dilemma
Coordination game
C
D
DC
col
col
rowrow
Which are potential games?Exact potential games?
Are the potential functions unique ?
2,10,0
0,01,2
Battle of the sexes
Properties of potential games
• Admit a pure strategy Nash equilibrium• Best-response dynamics converge to NE• Price of stability is bounded

Existence of a pure NE
• Theorem: every potential game admits a pure NE• Proof: we show that the profile minimizing is a NE
– Let s be pure profile minimizing – Suppose it is not a NE, so i can improve by deviating to a
new profile s’– (s’) - (s) = ci(s’) – ci(s) < 0– Thus(s’) < (s) , contradicting s minimizes
• More generally, the set of pure-strategy Nash equilibria is exactly the set of local minima of the potential function– Local minimum = no player can improve the potential function by
herself

Best-response dynamics converge to a NE
• Best-response dynamics: – Start with any strategy profile– If a player is not best-responding, switch that player’s
strategy to a better response (must decrease potential)– Terminate when no player can improve (thus a NE)
– Alas, no guarantee on the convergence rate

8
Multicast (and non-multicast) Routing
• Multicast routing: Given a directed graph G = (V, E) with edge costs ce 0, a source node s, and k agents located at terminal nodes t1, …, tk. Agent j must construct a path Pj from node s to its terminal tj.
• Routing: Given a directed graph G = (V, E) with edge costs ce 0, and k agents seeking to connect sj,tj pairs, Agent j must construct a path Pj from node sj to its terminal tj.
• Fair share: If x agents use edge e, they each pay ce / x.
Slides on cost sharing based on slides by Kevin Wayne.Copyright @ 2005 Pearson-Addison Wesley.
All rights reserved.

9
Multicast Routing : Shapley price sharing (fair cost sharing)
outer
2
outer
middle
4
1 pays
5 + 1
5/2 + 1
middle 4
1
outer
middle
middle
outer
8
2 pays
8
5/2 + 1
5 + 1
s
t1
v
t2
4 8
1 1
5

10
Nash Equilibrium• Example:
– Two agents start with outer paths.– Agent 1 has no incentive to switch
paths (since 4 < 5 + 1), but agent 2 does (since 8 > 5 + 1).
– Once this happens, agent 1 prefers middle path (since 4 > 5/2 + 1).
– Both agents using middle path is a Nash equilibrium.
s
t1
v
t2
4 8
1 1
5

Recall price of anarchy and stability
• Price of anarchy (poa)=cost of worst NE / cost of OPT
• Price of stability (pos)=cost of best NE / cost of OPT

Socially Optimum• Social optimum: Minimizes total costs of all agents.• Observation: In general, there can be many Nash
equilibria. Even when it is unique, it does not necessarily equal the social optimum.
s
t1
v
t2
3 5 5
1 1
Social optimum = 7Unique Nash equilibrium = 8
s
t
k1 +
Social optimum = 1 + Nash equilibrium A = 1 + Nash equilibrium B = k
k agents
pos=1, poa=k pos=poa=8/7

Price of anarchy
• Claim: poa ≤ k• Proof:
– Let N be the worst NE– Suppose by contradiction c(N) > k OPT– Then, there exists a player i s.t. ci(N) > OPT
– But i can deviate to OPT (by paying OPT alone), contradicting that N is a NE
• Note: bound is tight (lower bound in prev. slide)

14
Price of Stability• What is price of stability in multicast routing?
• Lower bound of log k:
s
t2 t3 tkt1. . .
1 1/2 1/3 1/k
0 0 0 0
1 +
1 + 1/2 + … + 1/k
Social optimum: Everyone Takes bottom paths.
Unique Nash equilibrium: Everyone takes top paths.
Price of stability: H(k) / (1 + ).
• upper bound will follow..
16
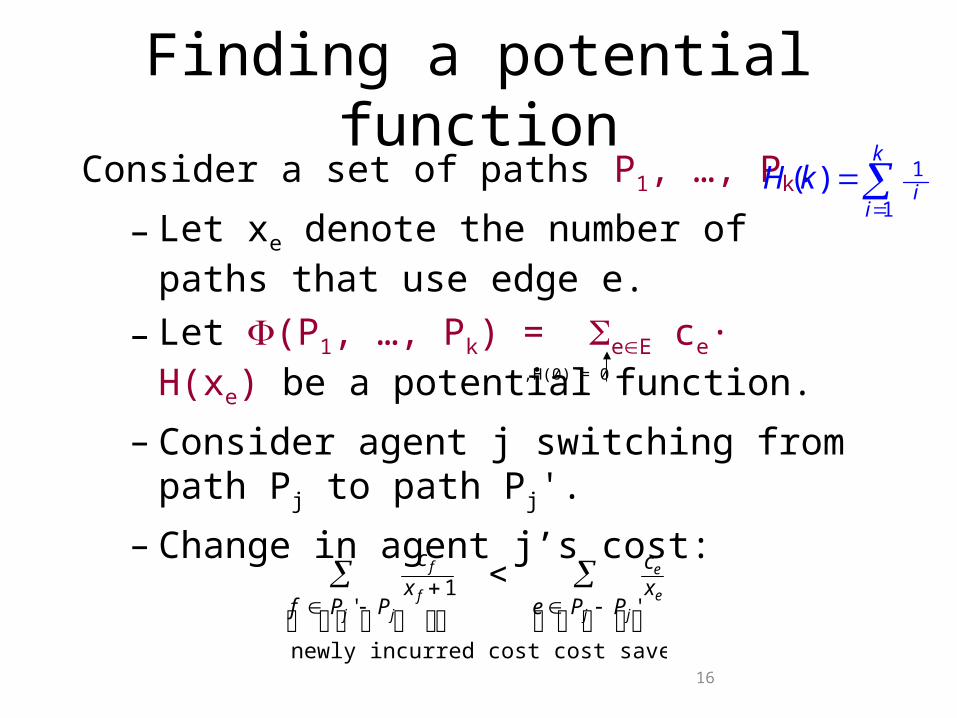
Finding a potential functionConsider a set of paths P1, …, Pk.
– Let xe denote the number of paths that use edge e.
– Let (P1, …, Pk) = eE ce· H(xe) be a potential function.
– Consider agent j switching from path Pj to path Pj'.
– Change in agent j’s cost:
H(0) = 0 ,
1
1( )
k
ii
H k
c f
x f 1f Pj ' Pj
newly incurred cost
ce
xee Pj Pj '
cost saved

17
Potential function– increases by
– decreases by
– Thus, net change in is identical to net change in player j’s cost
c f H(x f 1) H(x f ) f Pj ' Pj
c f
x f 1 f Pj ' Pj
ce H(xe ) H(xe 1) e Pj Pj '
ce
xe
e Pj Pj '

18
Bounding the Price of StabilityClaim: Let C(P1, …, Pk) denote the total cost of selecting
paths P1, …, Pk.
For any set of paths P1, …, Pk , we have
Proof: Let xe denote the number of paths containing edge e.
– Let E+ denote set of edges that belong to at least one of the paths.
C(P1,, Pk ) cee E ce H(xe )
e E
(P1,, Pk )
ce H(k) H(k)e E C(P1,, Pk )
),,()( ),,( ),,( 111 kkk PPCkHPPPPC

19
Bounding the Price of StabilityTheorem: There is a Nash equilibrium for which the total cost to
all agents exceeds that of the social optimum by at most a factor of H(k) (i.e., price of stability ≤ H(k)).
Proof:– Let (P1
*, …, Pk*) denote set of socially optimal paths.
– Run best-response dyn algorithm starting from P*.– Since is monotone decreasing (P1, …, Pk) (P1
*, …, Pk
*).
C(P1,, Pk ) (P1,, Pk ) (P1*,, Pk *) H(k) C(P1*,, Pk *)
previous claimapplied to P
previous claimapplied to P*

Congestion games [Rosenthal 73]
• There is a set of resources R
• Agent i’s set of actions (pure strategies) Ai is a subset of 2R, representing which subsets of resources would meet her needs – Note: different agents may need different resources
• There exist cost functions cr: {1, 2, 3, …} → such that agent i’s cost for a = (ai, a-i) is Σr ai
cr(nr(a)) – nr(a) is the number of agents that chose r as one of their resources in
the profile a

Example: multicast routing• Resources = edges• Each resource r has a cost cr
• Player 1’s action set: {{A}, {C,D}}• Player 2’s action set: {{B}, {C,E}}• For all resources r, cr(nr(a)) = cr / nr(a)
s
t1
v
t2
E
8
1 1
5A
4 C
D
B

Every congestion game is an exact potential game
• Use potential (a) = Σr Σ1 ≤ i ≤ nr(a) cr(i)– One interpretation: the sum of the costs that the agents would
have received if each agent were unaffected by all later agents • Why is this a correct potential function?
• Suppose an agent changes action: stop using some resources (R-), start using others (R+)
• increase in the agent’s cost equals Σr R+ cr(nr(a) + 1) - Σr R- cr(nr(a))
This is exactly the change in the potential function above
– Conclusion: congestion games are exact potential games

Other Congestion games
• (si,ti) connectivity, atomic flow, cost = latency, all flow one unit.

Computational Game Theory:Network Creation Game
Arbitrary Payments (Not a congestion game)
Credit to Slides
To Eva TardosModified/Corrupted/Added to
by Michal Feldman and Amos Fiat

Network Creation Game – Arbitrary Cost partition
G = (V,E) is an undirected graph with edge costs c(e).
There are k players.
Each player i has a source si and a sink ti he wants to have connected.
s1 t3
t1
t2s2
s3
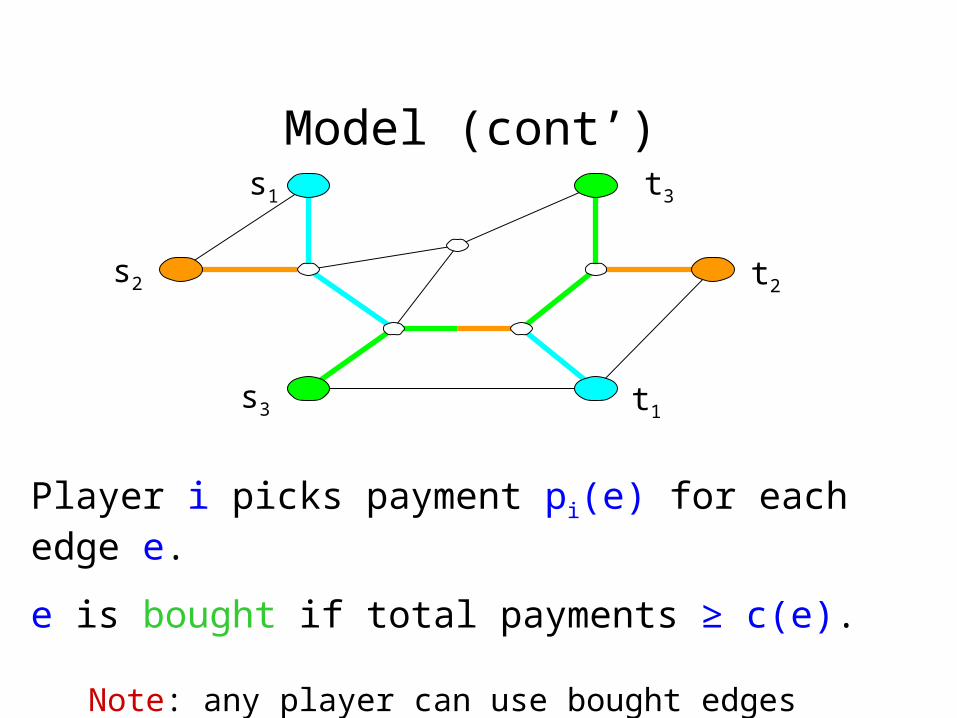
Model (cont’)
Player i picks payment pi(e) for each edge e.
e is bought if total payments ≥ c(e).
Note: any player can use bought edges
s1 t3
t1
t2s2
s3

The Game
Each player i has only 2 concerns :
1 (Must be a bought path from si to ti
s1 t3
t1
t2s2
s3
boughtedges

The Game
Each player i has only 2 concerns :
1 (Must be a bought path from si to ti
2 (Given this requirement, i wants to pays as little as possible.
s1 t3
t1
t2s2
s3

Nash Equilibrium
A Nash Equilibium (NE) is set of payments for players such that no player wants to deviate .
Note: player i doesn’t care whether other players connect.
s1 t3
t1
t2s2
s3

An Example
One NE: Each player pays 1/k to top edge.
Another NE: Each player pays 1 to bottom edge.
Note: No notion of “fairness”; many NE that pay unevenly for the cheap edge.
s1…sk t1…tk
c(e) = 1
c(e) = k

Three Observations
1) The bought edges in a NE form a forest.
2) Players only contribute to edges on their si-ti path in this forest.
3) The total payment for any edge e is either c(e) or 0.

Example 2: No Nash
s1
t1
t2
s2
all edges cost 1
ab
cd

Example 2: No Nash
s1
t1
t2
s2
We know that any NE must be a tree: WLOG assume the tree is a,b,c.
all edges cost 1
ab
cd

Example 2: No Pure Nash
s1
t1
t2
s2
We know that any NE must be a tree: WLOG assume the tree is a,b,c.
• Only player 1 can contribute to a.
all edges cost 1
ab
cd

Example 2: No Pure Nash
s1
t1
t2
s2
We know that any NE must be a tree: WLOG assume the tree is a,b,c.
• Only player 1 can contribute to a.
• Only player 2 can contribute to c.
all edges cost 1
ab
cd

Example 2: No Pure Nash
s1
t1
t2
s2
We know that any NE must be a tree: WLOG assume the tree is a,b,c.
• Only player 1 can contribute to a.
• Only player 2 can contribute to c.
• Neither player can contribute to b, since d is tempting deviation.
all edges cost 1
ab
cd