physics 401, spring 2013 - university of illinois torsional... · physics 401 1 ( ) cos( )at t t a...
TRANSCRIPT
Physics 401, Spring 2013 Eugene V. Colla
(1)

3/4/2013 2
1.Driven torsional oscillator. Equations
2.Setup. Kinematics
3.Resonance
4.Beats
5.Nonlinear effects
6.Comments

3/4/2013 3
Tacoma (WA) Narrows Bridge, 1940

3/4/2013 4
The goals: (i) analyze the response of the damped driven
harmonic oscillator to a sinusoidal drive. (ii) transient
response and (iii) steady-state solution.
L1 L2
M
R wire
disk
2
motor
𝑰𝜽 + 𝑲𝜽 + 𝑹𝜽 = 𝒎 = 𝑲𝜽𝟎𝐜𝐨𝐬(𝝎𝒕)
𝜽𝟎𝐜𝐨𝐬(𝝎𝒕);
Angular displacement:
torque:
𝑲λ𝜽𝟎𝐜𝐨𝐬(𝝎𝒕)
Viscous damping
I is momentum of inertia, [kgm2]
R is a damping constant [N⋅m⋅s].
K is the total spring constant [Nm]
Torque by motor
𝝀 =𝑳𝟏
𝑳𝟏 + 𝑳𝟐

3/4/2013 5
Motor Pendulum
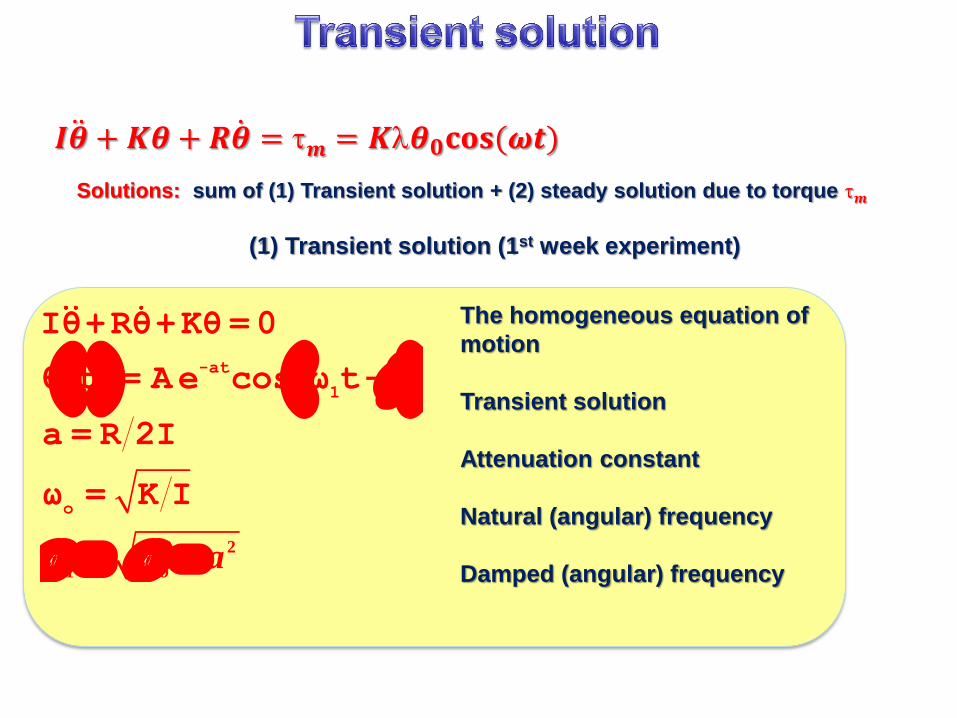
𝑰𝜽 + 𝑲𝜽 + 𝑹𝜽 = 𝒎 = 𝑲𝜽𝟎𝐜𝐨𝐬(𝝎𝒕)
Solutions: sum of (1) Transient solution + (2) steady solution due to torque 𝒎
2 2
1 oa
-at
1
o
Iθ+Rθ+Kθ=0
θ t = Ae cos ω t-
a = R 2I
ω = K I
The homogeneous equation of
motion
Transient solution
Attenuation constant
Natural (angular) frequency
Damped (angular) frequency
(1) Transient solution (1st week experiment)
3/4/2013 6
Physics 401
1( ) cos( )
at
tt A e t →
2 2
1 0a
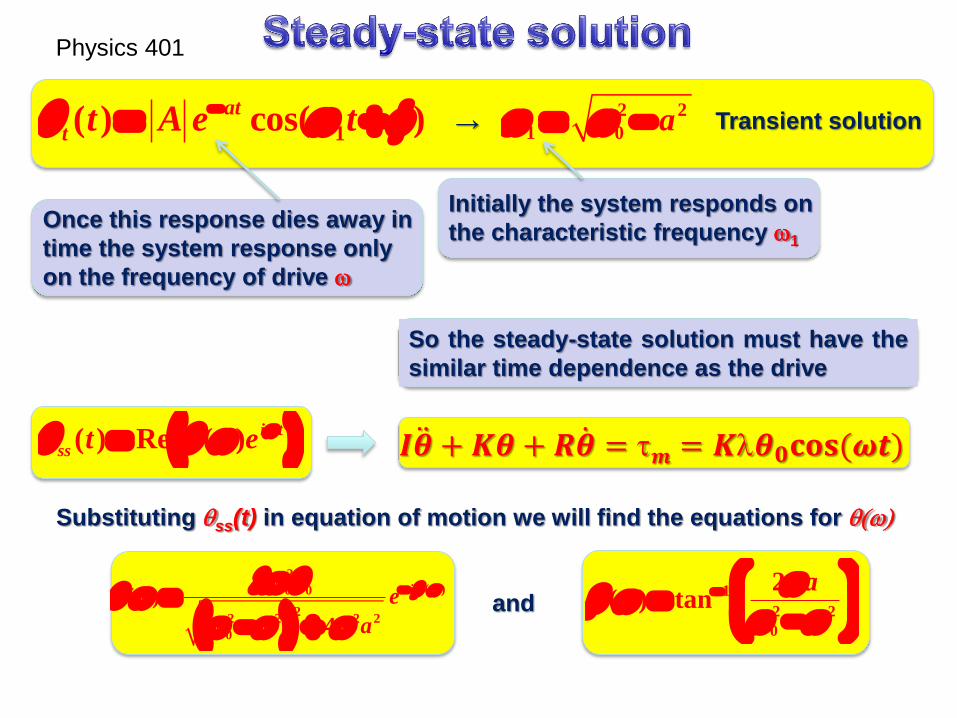
So the steady-state solution must have the
similar time dependence as the drive
( ) Re ( )i t
sst e
Substituting ss(t) in equation of motion we will find the equations for
2
( )0 0
22 2 2 2
0
( )
4
ie
a
and
1
2 2
0
2( ) tan
a
Transient solution
Initially the system responds on
the characteristic frequency 1 Once this response dies away in
time the system response only
on the frequency of drive
𝑰𝜽 + 𝑲𝜽 + 𝑹𝜽 = 𝒎 = 𝑲𝜽𝟎𝐜𝐨𝐬(𝝎𝒕)

𝑰𝜽 + 𝑲𝜽 + 𝑹𝜽 = 𝒎 = 𝑲𝜽𝟎𝐜𝐨𝐬(𝝎𝒕)
(2) steady solution
2
22 2 2 2
2 2
cos
tan
2 22
s
o o
o
o
t B t
B
R Ra
I I
Steady state solution
Amplitude function
Phase function
Damping constant
3/4/2013 8
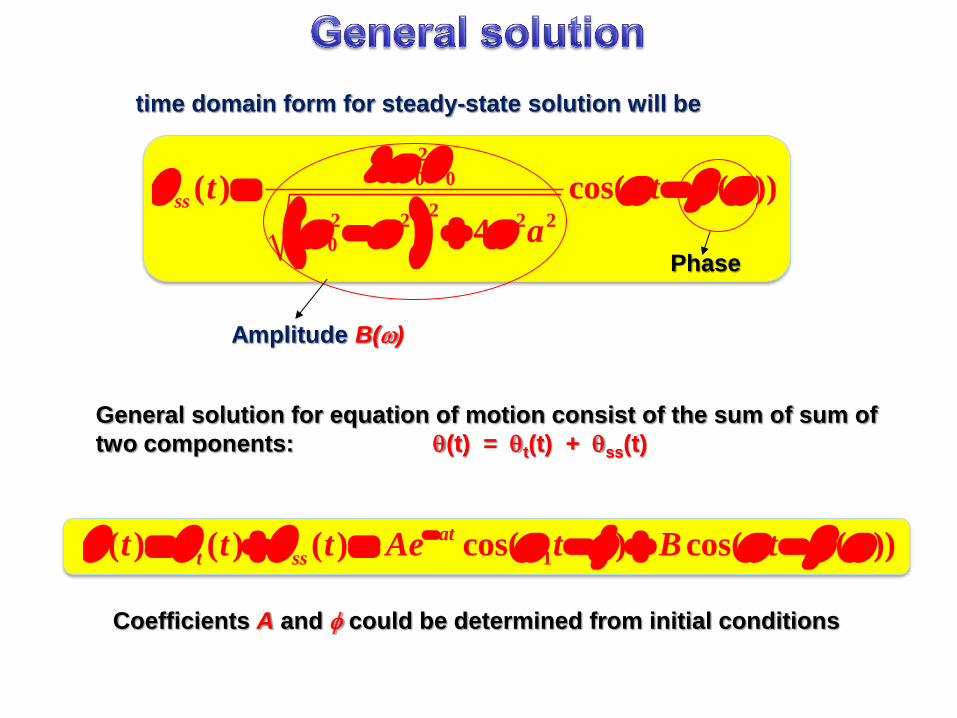
time domain form for steady-state solution will be
2
0 0
22 2 2 2
0
( ) cos( ( ))
4ss
t t
a
Amplitude B()
Phase
General solution for equation of motion consist of the sum of sum of
two components: (t) = t(t) + ss(t)
Coefficients A and could be determined from initial conditions
1( ) ( ) ( ) cos( ) cos( ( ))
at
t sst t t Ae t B t

0.1 1
0
1
2
(
rad
)
fd (Hz)
Fitting function:
2
0
22 2 2 2
0
( )A f
f
f f f
=2pf; =2a
-0.06 -0.04 -0.02 0.00 0.02 0.040
2
4
6
8
10
12
Count
Regular Residual of Sheet1 pend
Regular Residual of Sheet1 pend
Gauss Fit Counts
Model Gauss
Equation y=y0 + (A/(w*sqrt(PI/2)))*exp(-2*((x-xc)/w)^2)
Reduced Chi-Sqr
1.69162
Adj. R-Square 0.89685
Value Standard Error
Counts y0 1.01369 0.67924
Counts xc 6.5432E-4 0.00143
Counts w 0.02399 0.00358
Counts A 0.31875 0.05425
Counts sigma 0.01199
Counts FWHM 0.02824
Counts Height 10.60283
Model Resonance1 (User)
Equation y=A*f0^2/sqrt((f0^2-x^2)^2+x^2*gamma^2)
Reduced Chi-Sqr 3.00E-04
Adj. R-Square 0.999411988
Value Standard Error
pend A 0.286662 0.001663551
pend f0 0.500271 2.14E-04
pend gamma 0.062856 4.98E-04
f0=0.50Hz
(fitting)
To create a new fitting function
go “Tools”→”Fitting Function
Builder” or press F8

0.1 1
0
1
2
3
(
rad
)
fd (Hz)
Phase
Scanning the driving frequency we can measure the amplitude of the
pendulum oscillating and the phase shift
Both parameters Amplitude and phase can be
defined by DAQ program or using Origin

For correct representation of the resonance curve take
care about choosing of the step size in frequency.
3/4/2013 12
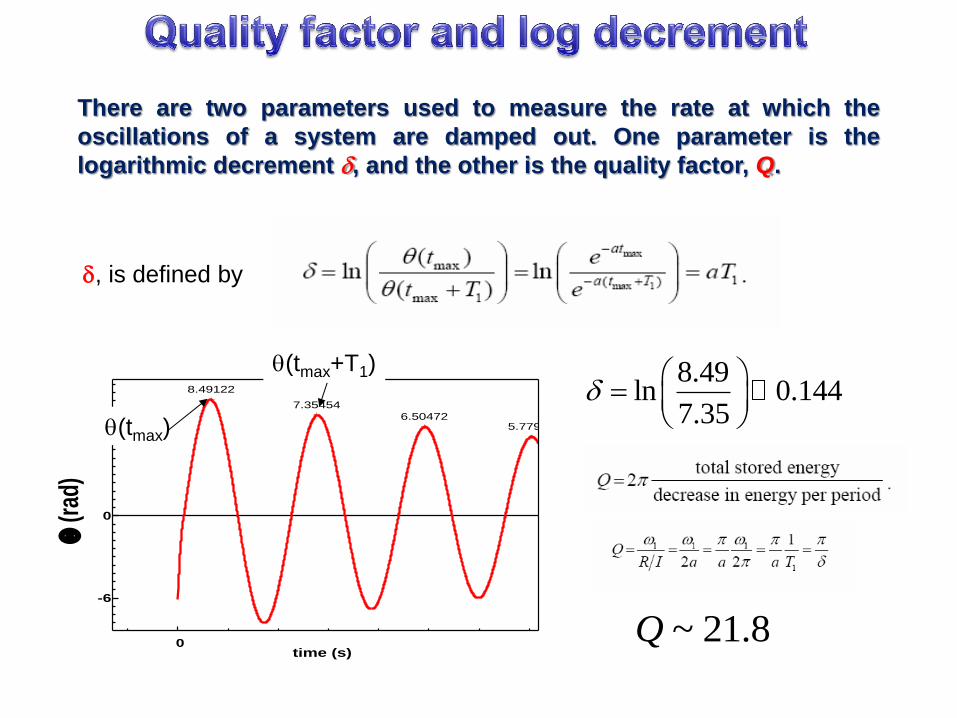
There are two parameters used to measure the rate at which the
oscillations of a system are damped out. One parameter is the
logarithmic decrement d, and the other is the quality factor, Q.
0
-6
0
6
8.49122
7.35454
6.504725.77915
5.158654.59185
4.133183.67989
3.238112.86765
2.465752.12904
1.780061.43875 1.13732 0.84893 0.57665 0.31204
time (s)
(r
ad)
(tmax)
(tmax+T1) 8.49ln 0.144
7.35d
~ 21.8Q
d, is defined by

0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
1
2
Am
plitu
de
fd (Hz)
f=0.0626Hz
f1=0.496Hz
It can be shown that Q can
be calculated as 1/ or
f1/f. is bandwidth of the
resonance curve on the
half power level or for
amplitude graph
maxθ
2
Here Q~7.9

Consider sum of two harmonic signals of frequencies 1 and 2
y1=Asin(1t+1); y2=Bsin(2t+2)
In case A=B y=y1+y2=𝟐𝑨𝒔𝒊𝒏𝝎𝟏+𝝎𝟐
𝟐𝒕 + 𝜷𝟏 𝒄𝒐𝒔
𝝎𝟏−𝝎𝟐
𝟐𝒕 + 𝜷𝟐 ;
𝜷𝟏 =𝝋𝟏+𝝋𝟐
𝟐; 𝜷𝟐 =
𝝋𝟏−𝝋𝟐
𝟐
If 1≈2 ≈𝝎𝟏+𝝎𝟐
𝟐= and
𝝎𝟏−𝝎𝟐
𝟐 =W
y= 𝟐𝑨𝒄𝒐𝒔 W𝒕 + 𝜷𝟐 𝒔𝒊𝒏 𝒕 + 𝜷𝟏
0 5000 10000 15000
-2
0
2
y
time (s)
0.0027 0.0028 0.0029 0.003 0.0031
1
10
0.00278 0.00294
f (Hz)
1=
2=

More general case A≠B 1 and 2
y1=Asin(t); y2=Bsin((+)t)
y=y1+y2=𝑪𝒔𝒊𝒏( + )𝒕 where 𝐂 = 𝑨𝟐 + 𝑩𝟐 + 𝟐𝑨𝑩𝒄𝒐𝒔(𝒂𝒕)
𝜷 = 𝒕𝒂𝒏−𝟏𝑩sin(𝜶𝒕)
𝑨 + 𝑩cos 𝛼𝑡+
𝟎𝒊𝒇𝑨 + 𝑩𝒄𝒐𝒔(𝜶𝒕) ≥ 𝟎
𝝅𝒊𝒇𝑨 + 𝑩𝒄𝒐𝒔 𝜶𝒕 < 𝟎
0 5000 10000 15000
-2
0
2
y
time (s)
𝑨𝟐 + 𝑩𝟐 + 𝟐𝑨𝑩
𝑨𝟐 + 𝑩𝟐 − 𝟐𝑨𝑩
0.0028 0.003
0
1
10
100
0.00278 0.00294
f (Hz)
1=
2=

0 18 36 54 72
-5
0
5
(r
ad
)
t (sec)
pend
0.0 0.2 0.4 0.6 0.8 1.0 1.20
200
400
600
800
10000.42738
0.51642
Frequency (Hz)
Am
plitu
de
Two peaks
corresponding
and
Time domain trace Beating spectrum
Use Origin to analyze the frequency spectrum !

0 200 400
-4
0
4
(ra
d)
time (s)
Beats dying in time.
How fast – it depends
on damping. When you
will work on resonance
data – wait until you will
see the steady state
oscillations.
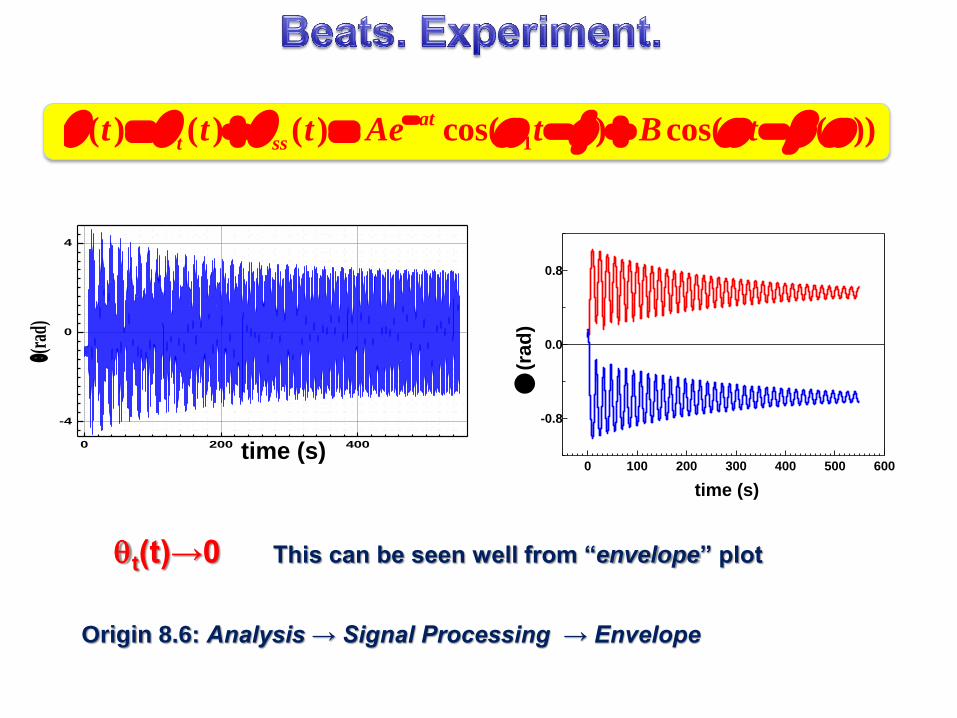
1( ) ( ) ( ) cos( ) cos( ( ))
at
t sst t t Ae t B t
t(t)→0
0 10 20 30 40 50 60
-4
0
4
time(s)
(r
ad
)
510 520 530 540 550
0
time(s)
(r
ad
)
0 200 400
-4
0
4
(ra
d)
time (s)
1( ) ( ) ( ) cos( ) cos( ( ))
at
t sst t t Ae t B t
0 100 200 300 400 500 600
-0.8
0.0
0.8
time (s)
(
rad
)
t(t)→0 This can be seen well from “envelope” plot
Origin 8.6: Analysis → Signal Processing → Envelope

1( ) ( ) ( ) cos( ) cos( ( ))
at
t sst t t Ae t B t C
First let we apply FFT
to find 1 and
Result: =3.1402rad-1 and =2.8298 rad-1

0
1( ) ( ) ( ) cos( ) cos( ( ))
t
t
t sst t t Ae t B t C
8 fitting parameters
Result from FFT: =3.1402rad-1 and =2.8298 rad-1
A 0.65012
t0 199.64912
3.13666
0.33135
B -0.74076
2.82464
-0.87829
C -0.11176
From fitting

FFT
Compare with original
pendulum spectrum Pendulum
Residuals
Possible origin of “extra” peaks:
(i) Nonlinear behavior of
pendulum
(ii) Not a single frequency driving
force provided by motor
(iii) Not ideal fitting function
0 200 400
-4
0
4
(ra
d)
time (s)
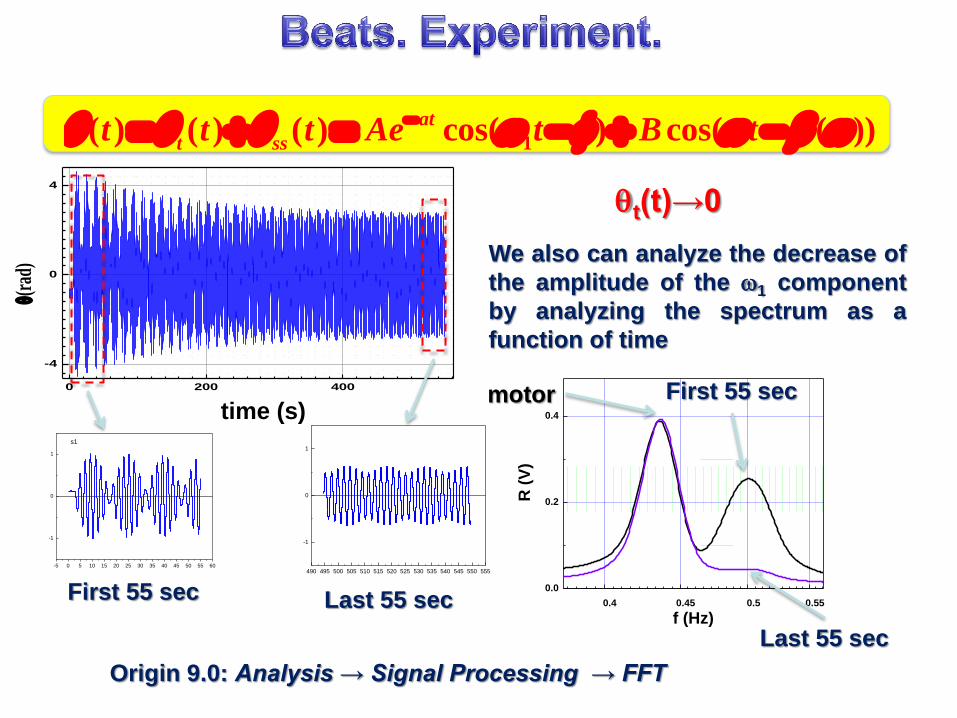
1( ) ( ) ( ) cos( ) cos( ( ))
at
t sst t t Ae t B t
t(t)→0
Origin 9.0: Analysis → Signal Processing → FFT
We also can analyze the decrease of
the amplitude of the 1 component
by analyzing the spectrum as a
function of time
-5 0 5 10 15 20 25 30 35 40 45 50 55 60
-1
0
1
s1
490 495 500 505 510 515 520 525 530 535 540 545 550 555
-1
0
1
First 55 sec Last 55 sec 0.4 0.45 0.5 0.55
0.0
0.2
0.4
R (
V)
f (Hz)
First 55 sec
Last 55 sec
motor

-5 0 5 10 15 20 25 30 35
0.0
0.4
d~0/3
time (s)
(
rad
)
0.1 1 10
10-4
10-3
10-2
10-1
Frequency (Hz)
Am
pli
tud
e
f0=0.4891Hz
fd=0.163 Hz
fd
=0.163
f0f0-fd
f0+fd

0 10 20 30
-0.3
0.0
0.3
time (s)
(
rad
)
d~0
0.1 1 10
10-4
10-3
10-2
10-1
f0
Frequency (Hz)A
mp
litu
de
f0=0.4891Hz
fd=0.244 Hz
fd
fd+f
0
In the case of driving frequency fd=f1/N where N is integer
we can observe more complicated motion of the pendulum

0.1 1 1010
2
103
104
105
106
107
0.43489
0.86796
1.30285
Frequency (Hz)
Magnitud
e
Detailed analyzes* shows that
even if ∅ = ∅𝟎 𝐬𝐢𝐧 𝝎𝒕
the driving torque contains
several harmonics of
*P. Debevec (UIUC, Department of Physics)

3/4/2013 27
R
0 10 20 30 40 50 60 70
0
1
2
3
420g step
(
rad
)
time (s)
𝝉 = 𝑹 × 𝑭
R’