parte i - grupo de geofísica computacionalmmc2.geofisica.unam.mx/cursos/hc/capitulo-1.pdf · de...
TRANSCRIPT
1
PARTE I
FUNDAMENTOS DE LA MODELACIÓN DE LOS SISTEMAS CONTINUOS.

2
1. MÉTODO SISTEMÁTICO PARA LA FORMULACIÓN DE LOS MODELOS
La técnica general que se utiliza para realizar la predicción es la modelación, la
cual consiste en construir modelos con los cuales se predice el comportamiento
del sistema que interesa [66].
1.1 Los Modelos
Un modelo de un sistema es un sustituto de cuyo comportamiento es posible
derivar el correspondiente al sistema original. Los modelos matemáticos, en la
actualidad, son los utilizados con mayor frecuencia y también los más versátiles.
En las aplicaciones específicas están constituidos por programas de cómputo cuya
aplicación y adaptación a cambios de las propiedades de los sistemas es
relativamente fácil. También, sus bases y las metodologías que utilizan son de
gran generalidad, por lo que es posible construirlos para situaciones y sistemas
muy diversos.
Los modelos matemáticos son entes en los que se integran los conocimientos
científicos y tecnológicos y con ellos se construyen programas de cómputo que se
implementan con medios computacionales. Hoy en día, la simulación numérica
permite estudiar sistemas complejos y fenómenos naturales que sería muy
costoso, peligroso o incluso imposible estudiar por experimentación directa. En
esta perspectiva la significación de los modelos matemáticos en Ciencias e
Ingeniería es clara, porque la modelación matemática constituye el método más
efectivo de predecir el comportamiento de los diversos sistemas de interés. En
nuestro país, ellos son usados ampliamente en la industria petrolera, en las
ciencias y la ingeniería del agua, en la industria automotriz y en muchas otras.
En este curso, estudiaremos las bases de la modelación matemática y
computacional de los sistemas físicos macroscópicos utilizando su formulación
axiomática [1-17]. Una gran parte de los sistemas de la ingeniería y tecnología son
de esta clase. La física macroscópica incluye, por ejemplo, las estructuras de la
Ingeniería Civil, los suelos, los problemas de la Hidrología, tanto superficial como
subterránea, la mecánica de los yacimientos petroleros, la propagación de las

3
ondas sísmicas (cuyo estudio es básico, entre otros temas, en Sismología e
Ingeniería Sísmica, así como en la exploración del petróleo y otros recursos
naturales), la dinámica de los océanos y de la atmósfera, etc.
1.2 Física Microscópica y Física Macroscópica
La materia, cuando se le observa en el ámbito ultramicroscópico, está formada por
moléculas y átomos. Estos a su vez, por partículas aún más pequeñas como los
protones, neutrones y electrones. La predicción del comportamiento de estas
partículas es el objeto de estudio de la mecánica cuántica y la física nuclear. Sin
embargo, cuando deseamos predecir el comportamiento de sistemas tan grandes
como la atmósfera o un yacimiento petrolero, los cuales están formados por un
número extraordinariamente grande de moléculas y átomos, su estudio resulta
inaccesible con esos métodos y en cambio el enfoque macroscópico es apropiado.
Por eso en lo que sigue distinguiremos dos enfoques para el estudio de la materia
y su movimiento. El primero -el de las moléculas, los átomos y las partículas
elementales- es el enfoque microscópico y el segundo es el enfoque
macroscópico. Al estudio de la materia con el enfoque macroscópico, se le llama
Física Macroscópica y sus bases teóricas las proporciona la Mecánica de los
Medios Continuos [1-17].
Cuando se estudia la materia con este último enfoque, se considera que los
cuerpos llenan el espacio que ocupan, es decir que no tienen huecos, que es la
forma en que los vemos sin el auxilio de un microscopio. Por ejemplo, el agua
llena todo el espacio del recipiente donde está contenida; nuestro escritorio de
trabajo es un continuo de materia perfectamente delimitado. Este enfoque
macroscópico está presente en la física clásica. La ciencia ha avanzado y ahora
sabemos que la materia está llena de huecos, que nuestros sentidos no perciben y
que la energía también está cuantizada. A pesar de que estos dos enfoques para
el análisis de los sistemas físicos, el microscópico y el macroscópico, parecen a
primera vista conceptualmente contradictorios, ambos son no tan sólo compatibles
sino además complementarios, y es posible establecer la relación entre ellos
utilizando a la Mecánica Estadística. La Teoría de los Sistemas Macroscópicos es

4
aplicable no solamente a sistemas físicos, sino también a sistemas químicos y a
algunos sistemas formados por seres vivos. Así, utilizándola en algunos casos es
posible predecir el movimiento y evolución de poblaciones formadas por seres
vivos microscópicos. Para ello, se ignora a los individuos microscópicos y se les
considera distribuidos en todo el espacio de estudio.
Muchos sistemas de la Ciencia, la Ingeniería y las Ciencias Aplicadas se estudian
con la Mecánica de los Medios Continuos. Entre los sistemas que requieren de la
aplicación de la Teoría del Continuo para realizar la predicción de su
comportamiento, están las estructuras, los suelos, las cimentaciones, y la corteza
y el interior profundo de la Tierra; el flujo sanguíneo, el sistema mecánico de los
huesos, los depósitos de recursos naturales como el petróleo o el agua
subterránea, la atmósfera y el estado del tiempo. Intentar, por ejemplo, predecir el
estado del tiempo simulando cada una de las partículas de la atmósfera es una
tarea monumental completamente imposible de realizar, por ahora y en el futuro
previsible, a pesar de los grandes recursos computacionales a nuestro alcance.
Por otra parte, el avance en el ámbito mundial de la Modelación Matemática y
Computacional ha permitido tratar con estos métodos una diversidad cada vez
más amplia de sistemas, incluyendo muchos biológicos. Presentar esta gran
diversidad en forma unificada permite un gran ahorro de esfuerzo en el proceso de
enseñanza-aprendizaje y, debido a que la formulación unificada contiene muchas
situaciones no previstas, proporciona un valiosísimo instrumento para la
investigación. Muchos de los desarrollos originales de la formulación axiomática
son casi inaccesibles para la comunidad no matemática, pero se han realizado
diversos esfuerzos para poner dicha formulación en términos de más fácil
comprensión. En particular, la presentación contenida en la referencia [8] destaca
por su sencillez y la que se da a continuación es muy similar a ella, excepto por el
hecho de que utilizaremos las ‘propiedades intensivas’ por unidad de volumen, en
lugar de por unidad de masa. Como se verá, esto proporciona ventajas
significativas en el desarrollo y las aplicaciones de la teoría.
1.3.- Cinemática de los sistemas continuos

5
En la Teoría de los Sistemas Continuos, ‘los cuerpos llenan todo el espacio que
ocupan’; y en cada punto del espacio físico hay una y solamente una partícula. Un
cuerpo es un conjunto de partículas, que denotaremos por B , el cual en cualquier
instante dado ocupa un dominio -en el sentido matemático, [18]-, del espacio
físico; es decir, del espacio Euclidiano tridimensional. Denotaremos por ( )B t al
dominio ocupado por el cuerpo B , en el tiempo t . En general, t puede ser
cualquier número real; es decir t− ∞ < < ∞ , pero en cada caso de estudio hay un
intervalo finito de tiempo en el cual se centra el interés. Dado un cuerpo B , todo
subdominio BB ⊂~ , constituye a su vez otro cuerpo; en tal caso, se dice que
BB ⊂~ es un subcuerpo de B . De acuerdo con lo mencionado antes, una hipótesis
básica de la teoría de los sistemas continuos es que en cualquier tiempo,
( , )t∈ −∞ ∞ , y en cada punto, )(tBx∈ , de la región ocupada por el cuerpo, hay una
y sólo una partícula del cuerpo B . Como nuestro estudio incluye no solamente la
estática (es decir, los cuerpos en reposo), sino también la dinámica (es decir, los
cuerpos en movimiento), un primer problema de la cinemática de los sistemas
continuos consiste en establecer un procedimiento para identificar a las partículas
cuando están en movimiento.
Sea X una partícula y ( ),p X t el vector de posición en el espacio físico de dicha
partícula en el tiempo t . Una forma, aunque no la única, de identificar a la
partícula, X , es asociándole la posición que ocupa en un instante determinado.
Tomaremos en particular el tiempo 0t = . En tal caso
( ),0p X X≡ (1.1)
A las coordenadas del vector ( )1 2 3, ,X X X X≡ , se les llama las coordenadas
materiales de la partícula. En este caso, las coordenadas materiales de una
partícula son las coordenadas del punto del espacio físico que ocupaba la
partícula en el tiempo inicial, 0t = . Desde luego, el tiempo inicial puede ser
cualquier otro, si así se desea. Sea B el dominio ocupado por un cuerpo en el
tiempo inicial, entonces X ∈B si y solamente si la partícula X pertenece al
cuerpo. Es decir, el dominio B caracteriza al cuerpo. Sin embargo, debido al

6
movimiento, la región ocupada por el mismo, ( )B t , cambia con el tiempo (ver
Figura 1). Formalmente, para cualquier ( , )t∈ −∞ ∞ , ( )B t se define por
( ) 3( ) ,B t x R X x p X t≡ ∈ ∃ ∈ ∋ =B (1.2)
El vector de posición, ( , )X tp , es función del vector (tridimensional) X y del
tiempo t . Si fijamos t , ( , )X tp define una transformación del espacio Euclideano
3R en sí mismo y la ecuación (1.2) es equivalente a ( ) (B, )B t tp= . Una notación
utilizada para representar esta familia de mapeos es ( , )tp i . De acuerdo a la
hipótesis de
B B(t)
t
x
Coordenadas materiales
tiempo incial
X

7
B B(t)
t
x
tiempo incial
X
( ),p X t
( )1,p x t
−

8
los sistemas continuos: En cualquier tiempo ( , )t∈ −∞ ∞ y en cada punto )(tBx∈
de la región ocupada por el cuerpo hay una, y solo una, partícula del cuerpo B
para cada t fijo. Es decir, ( , )tp i es un mapeo biunívoco, por lo que existe el
mapeo inverso ( )1, tp−i . Ver Figura 2.
Si se fija la partícula, X , en la función ( , )X tp y se varía el tiempo t , se obtiene su
trayectoria. Esto permite obtener la velocidad de cualquier partícula, la cual es un
concepto central en la descripción del movimiento. Ella se define como la derivada
con respecto al tiempo de la posición cuando la partícula se mantiene fija. Es
decir, es la derivada parcial con respecto al tiempo de la función de posición,
( , )X tp . Por lo mismo, la velocidad como función de las coordenadas materiales
de las partículas, está dada por
( , ) ( , );p
V X t X tt
∂≡
∂ (1.3)
1.4.- Propiedades intensivas y sus representaciones
En lo que sigue estudiaremos funciones definidas, para cada tiempo, en cada una
de las partículas de un sistema continuo. Hay dos formas de representar a tales
funciones. En una de ellas, llamada representación Lagrangeana, se da el valor de
la funcion en la partícula X y en el tiempo t ; se usará la notación ),( tXφ para
esta representación. Esa misma función puede también representarse por medio
de la función ( ),x tψ , donde ( ),x tψ da el valor de la propiedad intensiva en la
partícula que ocupa la posición x en el tiempo t . A esta ultima forma se le llama
representación Eulereana. A cualquier función de esta clase, cuando la
representación Eulereana es integrable para todo tiempo, se le llamará ‘propiedad
intensiva’.
Las propiedades intensivas pueden ser funciones escalares o funciones
vectoriales. Por ejemplo, la velocidad definida por la Ec.(1.3) es una función
vectorial que depende de la partícula X y del tiempo t ; por lo mismo, ahí la

9
función ( , )V X t proporciona la represnteación Lagrangeana de la velocidad, la cual
toma valores vectoriales. Note que una propiedad intensiva vectorial es
equivalente tres escalares, correspondientes a cada una de sus tres componentes.
Los nombres de estas representaciones son en honor a los matemáticos Leonard
Euler (1707-1783) y Joseph Louis Lagrange (1736-1813), respectivamente.
Frecuentemente, el punto de vista Lagrangeano es ampliamente utilizado en el
estudio de los sólidos, mientras que el Eulereano se usa más en el estudio de los
fluidos.
Una condición necesaria y suficiente para que las funciones ( , )X tφ y ( ( , ), )p X t tψ
representen a la misma propiedad intensiva es que ellas satisfagan la siguiente
ecuación:
( , ) ( ( , ), );X t p X t tφ ψ≡ (1.4)
Note que en general dos funciones ( , )X tφ y ( , )x tψ que satisfacen la Ec.(1.4) no
son idénticas. Sus argumentos X y x son vectores tridimensionales (es decir,
puntos de 3R ), pero si tomamos x X= generalmente
( ) ( ), ,X t X tφ ψ≠ (1.5)
Por otra parte, Ec.(1.4) implica
1
( , ) ( ( , ), );x t p x t tψ φ−
≡ (1.6)
Es fácil ver que las Ecs.(1.4) y (1.6) son equivalentes. Envista de las Ecs. (1.4) y
(1.6), la representación Lagrangeana de la velocidad, dada por la Ec.(1.3),
satisface
( ), ( , ) ( ( , ), )pX t V X t p X t t
t
∂= ≡
∂v (1.7)
Además,
1
( , ) ( ( , ), );x t V p x t t−
≡v (1.8)
donde la notación ( , )x tv se adopta para la representación Eulereana de la
elocidad.

10
La derivada parcial con respecto al tiempo de la representación Lagrangeana
( , )X tφ , de una propiedad intensiva, de acuerdo a la definición de la derivada
parcial de una función, es la tasa de cambio con respecto al tiempo que ocurre en
una partícula fija. Es decir, si nos montamos en una partícula y medimos a la
propiedad intensiva y luego los valores así obtenidos los derivamos con respecto
al tiempo, el resultado final es ( , ) /X t tφ∂ ∂ . En cambio, si ( , )x tψ es la
representación Eulereana de esa misma propiedad, entonces ( , ) /x t tψ∂ ∂ es
simplemente tasa de cambio con respecto al tiempo que ocurre en un punto fijo en
el espacio. Tiene interés evaluar la tasa de cambio con respecto al tiempo que
ocurre en una partícula fija, cuando se usa la representación Eulereana. Derivando
con respecto al tiempo a la identidad de la Ec.(1.4) y aplicando la regla de la
cadena, se obtiene
( )3
1
( , )( ( , ), ) ( ( , ), ) ,i
i i
pX tp X t t p X t t X t
t t x t
φ ψ ψ
=
∂∂ ∂ ∂= +
∂ ∂ ∂ ∂∑ (1.9)
o, más brevemente
( , )
/X t
tt
φψ ψ
∂= ∂ ∂ + ⋅∇
∂v (1.10)
Se acostumbra definir el símbolo /D Dtψ por
/ /D Dt tψ ψ ψ= ∂ ∂ + ⋅∇v (1.11)
Utilizando esta notación, se puede escribir
( )( ) ( ) ( )( , )/ ( , ), / ( , ),
X tD Dt p X t t t p X t t
t
φψ ψ ψ
∂= ≡ ∂ ∂ + ⋅∇
∂v (1.12)
Por ejemplo, la aceleración de una partícula (a ) se define como la derivada de la
velocidad cuando se mantiene a la partícula fija. Así, la representación Eulereana
de la aceleración se obtiene aplicando la Ec. (1.12) a la representación Eulereana
de velocidad:
( ) ( )( ), / ,a x t t x t= ∂ ∂ + ⋅∇v v v (1.13)
Una expresión tal vez más transparente se obtiene aplicando la Ec.(1.12) a cada
una de las componentes de la velocidad. Así:
( ) ( )( ), / , ; 1,...,3i i ia x t t x t i= ∂ ∂ + ⋅∇ =v v v (1.14)
Desde luego, la aceleración, en representación Lagrangeana es simplemente

11
( ) ( )2
2, ,V X t p X t
t t
∂ ∂≡
∂ ∂ (1.15)
1.5.- Propiedades Extensivas
En la sección anterior se consideraron funciones definidas en las partículas de un
cuerpo; más precisamente, funciones que hacen corresponder a cada partícula y
cada tiempo un número real, o un vector del espacio Euclideano
tridimensional, 3 R . En ésta, en cambio, empezaremos por considerar funciones
que a cada cuerpo, B , de un sistema continuo, y a cada tiempo , t , le asocia un
número real o un vector de 3 R . A una función de este tipo, ( ),E tB , se le llama
‘propiedad extensiva’ cuando está dada por una integral:
( )( )
, ( , ) ;B t
E t x t d xψ≡ ∫B (1.16)
Observe que en tal caso el integrando es una función ( , )x tψ necesariamente
integrable, y por lo mismo es la representación Eulereana de una propiedad
intensiva. Además, la Ec.(1.16) establece una correspondencia biunívoca entre las
propiedades extensivas y las intensivas, porque dada la representación Eulereana,
( , )x tψ , de cualquier propiedad intensiva su integral sobre el dominio ocupado por
cualquier cuerpo define una propiedad extensiva e inversamente, dada una
propiedad extensiva el integrando, cuando se le expresa en la forma de la
Ec.(1.16), define una propiedad intensiva. Finalmente, nótese que la forma de
escribir la Ec.(1.16) es muy explícita, pues ahí se ha escrito ( ),E tB para enfatizar
que el valor de la propiedad extensiva corresponde al cuerpo B . Sin embargo en
lo que sucesivo, siempre que sea posible sin caer en ambigüedad, se simplificará
la notación omitiendo el símbolo B ; es decir, se escribirá ( )E t en vez de ( ),E tB .
Hay diferentes formas de definir a las propiedades intensivas. Como aquí lo
hemos hecho es por unidad de volumen. Sin embargo, es frecuente que se les
defina por unidad de masa [8]. Es fácil ver que la propiedad intensiva por unidad
de volumen es igual a la propiedad intensiva por unidad de masa multiplicada por
la densidad de masa (es decir, masa por unidad de volumen), por lo que utilizando

12
la densidad de masa, con sencillez se pasa de un concepto al otro. Sin embargo,
una ventaja de utilizar a las propiedades intensivas por unidad de volumen, en
lugar de las propiedades intensivas por unidad de masa, es que la definición del
volumen del espacio físico es independiente del sistema continuo considerado, en
cambio el concepto de masa es relativo al sistema continuo en estudio.
Concomitantemente, la correspondencia entre las propiedades extensivas y las
intensivas por unidad de volumen es más directa que la correspondencia entre las
propiedades extensivas y las intensivas por unidad de masa; en efecto, cuando se
usa la propiedad intensiva por unidad de volumen, dada una propiedad extensiva
para identificar la propiedad intensiva correspondiente, basta con expresar a la
primera como una integral de volumen, pues el integrando de ella es la propiedad
intensiva correspondiente. Por otra parte, del cálculo se sabe que
( )
0 0
( , )( )
( , ) lim lim ;B t
Vol Vol
t dE t
x tVol Vol
ψ ξ ξ
ψ→ →
≡ =
∫ (1.17)
La Ec.(1.17) proporciona un procedimiento efectivo para determinar las
propiedades extensivas experimentalmente: se mide la propiedad extensiva en un
volumen del sistema continuo de que se trate, se le divide entre el volumen y el
cociente que se obtiene es una buena aproximación de la propiedad intensiva, si
el volumen es suficientemente pequeño.
El uso que haremos del concepto de propiedad extensiva es, desde luego,
lógicamente consistente. En particular, “cualquier propiedad que satisface las
condiciones de la definición de propiedad extensiva establecidas antes es, por ese
hecho, una propiedad extensiva”. Sin embargo, no todas las propiedades
extensivas que se nos pueden ocurrir de esta manera son de interés en la
mecánica de los medios continuos. A pesar de esto, el concepto de propiedad
extensiva es fundamental en la teoría de los sistemas continuos, pues el modelo
básico de todos ellos se formula en términos de ecuaciones de balance de
propiedades extensivas.
1.6. Balance de Propiedades Extensivas e Intensivas

13
Los modelos matemáticos de los sistemas continuos están constituidos por los
balances de algunas familias propiedades extensivas. Por ejemplo, los modelos de
transporte de solutos (los contaminantes transportados por corrientes superficiales
o subterráneas, son un caso particular de estos procesos de transporte) se
construyen haciendo el balance de la masa de soluto que hay en cualquier
dominio del espacio físico. Aquí, el término balance se usa, esencialmente, en un
sentido contable. En la contabilidad que se realiza para fines financieros o fiscales,
la diferencia de las entradas menos las salidas nos da el aumento, o cambio, de
capital. En forma similar, en la mecánica de los medios continuos se realiza, en
cada cuerpo del sistema continuo, un balance de las propiedades extensivas en
que se basa el modelo.
1.6.1 Ecuación de balance global
Para realizar tales balances es necesario, en primer lugar, identificar las causas
por las que las propiedades extensivas pueden cambiar. Tomemos como ejemplo
de una propiedad extensiva a las existencias de maíz que hay en el país. La
primera pregunta es: qué causas pueden motivar la variación, o cambio, de esas
existencias. Un análisis sencillo nos muestra que dicha variación puede ser debida
a que se produzca o se consuma. También a que se importe o se exporte por los
límites del país (fronteras o litorales). Y con esto se agotan las causas posibles; es
decir, esta lista es exhaustiva. Producción y consumo son términos similares que
fácilmente se engloban en uno sólo de esos conceptos, pues la diferencia entre
ellos es que sus efectos tienen signos opuestos. Así, si convenimos en que la
producción puede ser negativa, entonces el consumo es simplemente una
producción negativa. Una vez adoptada esta convención, ya no es necesario
ocuparnos separadamente del consumo. En forma similar, la exportación es una
importación negativa. Entonces, el incremento en las existencias, E∆ , en un
período, t∆ , queda dado por la ecuación
E P I∆ = + (1.18)
Donde a la producción y a la importación, ambas con signo, se les ha
representado por P e I , respectivamente.

14
Similarmente, en la mecánica de los medios continuos, la lista exhaustiva de las
causas por las que una propiedad extensiva de cualquier cuerpo puede cambiar,
contiene solamente dos motivos:
i. Por producción en el interior del cuerpo; y
ii. Por importación (es decir, transporte) a través de la frontera.
Esto conduce a la siguiente ecuación de ‘balance global’, de gran generalidad,
para las propiedades extensivas:
( ) ( ) ( )
( ) ( , ) ( , ) ( , )B t B t t
dEt g x t d x q x t d x g x t d x
dtΣ
∂ Σ
= + +∫ ∫ ∫ (1.19)
Donde ( , )g x t es la generación en el interior del cuerpo, con signo, de la propiedad
extensiva correspondiente, por unidad de volumen, por unidad de tiempo.
Además, en la Ec.(1.19) se ha tomado en cuenta la posibilidad de que haya
producción concentrada en la superficie ( )tΣ , la cual está dada en esa ecuación
por la última integral, donde ( , )g x tΣ es la producción por unidad de área. Por otra
parte, ( ),q x t es lo que se importa, o transporta, hacia e interior del cuerpo a través
de la frontera del cuerpo ( )B t∂ ; en otras palabras, es el flujo de la propiedad
extensiva a través de la frontera del cuerpo, por unidad de área, por unidad de
tiempo. Puede demostrarse [5], con base en hipótesis válidas en condiciones muy
generales, que para cada tiempo, t , existe un campo vectorial ( ),x tτ tal que
( ) ( ) ( ), , ,q x t x t n x tτ≡ ⋅ (1.20)
donde ( ),n x t es normal exterior a ( )B t∂ . En vista de esta relación, la ecuación de
balance se puede escribir como
( )( )
( ) ( )( ) ( )
( ) , , , ( , )B t B t t
dEt g x t d x x t n x t d x g x t d x
dtτ Σ
∂ Σ
= + ⋅ +∫ ∫ ∫ (1.21)
A las funciones ( ) ,g x t y ( ) ,g x tΣ se les denomina ‘generación’ (frecuentemente
generación interna), y el campo vectorial ( ) ,x tτ es el ‘campo de flujo’ [8]. A la
Ec.(1.21) se le refiere como la “Ecuación General de Balance Global” y es la
ecuación básica de los balances de los sistemas continuos.

15
En la mayor parte de los tratados sobre mecánica de medios continuos, la función
( , )g x tΣ no se considera y la ecuación que se obtiene corresponde a la Ec.(1.21)
con 0gΣ = ; es decir,
( )( )
( ) ( )( )
( ) , , ,B t B t
dEt g x t d x x t n x t d x
dtτ
∂
= + ⋅∫ ∫ (1.22)
Aquí, ese término se ha incluido porque hay casos de interés cuyo tratamiento
requiere de la incorporación de fuentes concentradas en la superficie Σ . Un
ejemplo de esta situación se presenta la modelación de “yacimientos con punto de
burbuja variable”, de la Ingeniería Petrolera [19-24]. Sin embargo, para simplificar
un poco y también porque la condición 0gΣ ≠ se da solo en casos muy especiales,
en lo que sigue solamente se considerara la Ec.(1.22).
1.6.2 Condiciones de Balance Local
Como ya se dijo, los modelos de los sistemas continuos están constituidos por las
ecuaciones de balance correspondientes a una colección de propiedades
extensivas. Así, a cada sistema continuo le corresponde una familia de
propiedades extensivas, tal que, el modelo matemático del sistema está
constituido por las condiciones de balance de cada una de las propiedades
extensivas de dicha familia. Sin embargo, las propiedades extensivas mismas no
se utilizan directamente en la formulación del modelo, en su lugar se usan las
propiedades intensivas asociadas a cada una de ellas. Esto es posible porque las
Ecuaciones de Balance Global son equivalentes a las llamadas Condiciones de
Balance Local, las cuales se expresan en términos de las propiedades intensivas
correspondientes. Las Condiciones de Balance Local son de dos clases: “las
Ecuaciones Diferenciales de Balance Local” y “las Condiciones de Salto”. Las
primeras son ecuaciones diferenciales parciales, que se deben satisfacer en cada
punto del espacio ocupado por el sistema continuo, y las segundas son
ecuaciones algebraicas que las discontinuidades deben satisfacer donde ocurren;
es decir, en cada punto de Σ . Cabe mencionar que las Ecuaciones Diferenciales
de Balance Local son de uso mucho más amplio que las Condiciones de Salto,
pues estas últimas solamente se aplican cuando y donde hay discontinuidades,
mientras que las primeras en todo punto del espacio ocupado por el sistema
16
continuo. Y, hay que decirlo, solamente en problemas de carácter especial es
necesario introducir modelos en que las propiedades intensivas son discontinuas.
Los llamados ‘choques’, ampliamente conocidos en el flujo supersónico de fluidos
compresibles –no-viscosos-, son cambios muy rápidos tanto en la presión como
en otras propiedades del fluido [25], los cuales en los modelos en que se
desprecia la viscosidad, se simulan como discontinuidades de dichas propiedades
del fluido [25].
Una vez establecidas las ecuaciones diferenciales y de salto del balance local, e
incorporada la información científica y tecnológica necesaria para completar el
modelo (la cual por cierto se introduce a través de las llamadas “ecuaciones
constitutivas”), el problema matemático de desarrollar el modelo y derivar sus
predicciones se transforma en uno correspondiente a la Teoría de la Ecuaciones
Diferenciales, generalmente parciales, y sus Métodos Numéricos.
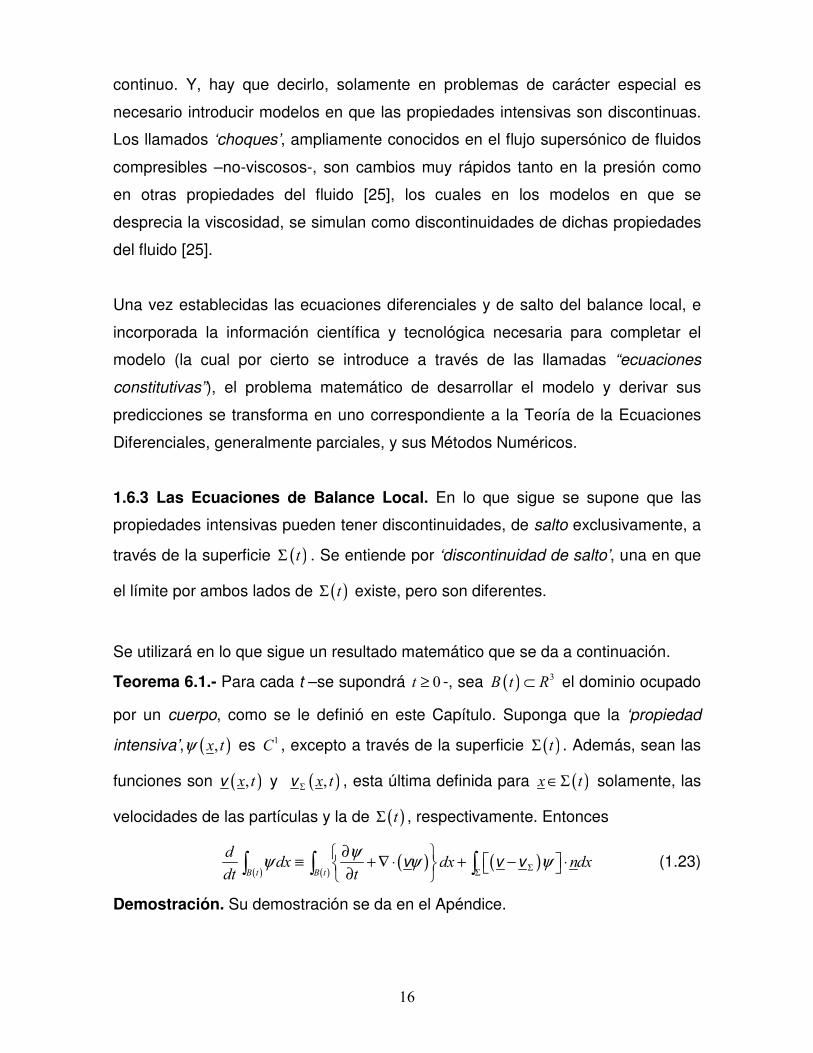
1.6.3 Las Ecuaciones de Balance Local. En lo que sigue se supone que las
propiedades intensivas pueden tener discontinuidades, de salto exclusivamente, a
través de la superficie ( )tΣ . Se entiende por ‘discontinuidad de salto’, una en que
el límite por ambos lados de ( )tΣ existe, pero son diferentes.
Se utilizará en lo que sigue un resultado matemático que se da a continuación.
Teorema 6.1.- Para cada t –se supondrá 0t ≥ -, sea ( ) 3B t R⊂ el dominio ocupado
por un cuerpo, como se le definió en este Capítulo. Suponga que la ‘propiedad
intensiva’, ( ),x tψ es 1C , excepto a través de la superficie ( )tΣ . Además, sean las
funciones son ( ),x tv y ( ) ,x tΣv , esta última definida para ( )x t∈Σ solamente, las
velocidades de las partículas y la de ( )tΣ , respectivamente. Entonces
( )
( )( )
( )B t B t
ddx dx ndx
dt t
ψψ ψ ψΣ
Σ
∂ ≡ + ∇ ⋅ + − ⋅ ∂
∫ ∫ ∫v v v (1.23)
Demostración. Su demostración se da en el Apéndice.

17
Teorema 6.2.- Considere un sistema continuo,. Entonces, la “Ecuación de Balance
Global”, (1.21), se satisface para todo cuerpo del sistema continuo, si y solamente
si, se cumplen las condiciones siguientes simultáneamente:
i. La ecuación diferencial
( ) gt
ψψ τ
∂+ ∇ ⋅ = ∇ ⋅ +
∂v (1.24)
vale en todo punto 3x R∈ , excepto en Σ , de la región ocupada por el sistema.
ii. La ecuación
( ) 0nψ τΣ− − ⋅ = v v (1.25)
vale en todo punto, x∈Σ .
Demostración. En vista del Teorema de Gauss Generalizado (Apéndice I de este
Capitulo), la Ec. (1.22) puede escribirse como
( ) ( ) ( )
( )( )
( ) , , ,B t t
dEt g x t x t dx n x t dx
dtτ τ
Σ
= + ∇ + ⋅∫ ∫i (1.26)
Combinando esta ecuación con la Ec. (1.23), resulta que la Ecuación de Balance
Global es equivalente a
( ) ( ) ( )( )
( )( )
, , 0B t t
g x t x t dx ndxt
ψψ τ ψ τΣ
Σ
∂ + ∇ ⋅ − − ∇ + − − ⋅ =
∂ ∫ ∫ i v v v (1.27)
A su vez, esta ecuación se satisface para todo dominio del espacio físico ( )B t , si
y solamente si, el primer integrando que ocurre en ella se anula idénticamente en
todo punto del espacio ocupado por el sistema continuo, y el segundo integrando
se anula en todo punto de Σ . Con lo cual queda establecida la equivalencia de las
Ecuaciones de Balance con el sistema de ecuaciones (1.24) y (1.25). A las
ecuaciones (1.24) y (1.25), se les llama “Ecuación Diferencial de Balance
Local” y “Condición de Salto”, respectivamente.
Desde luego, el caso más general que se estudiará se refiere a situaciones
dinámicas; es decir, aquéllas en que las propiedades intensivas cambian con el
tiempo. Sin embargo, los estados estacionarios de los sistemas continuos son de
sumo interés. Por estado estacionario se entiende uno en que las propiedades
intensivas son independientes del tiempo. En este caso, / 0tψ∂ ∂ ≡ . Por lo mismo,
para los estados estacionarios, la Ecuación de Balance Local se reduce a

18
( ) gψ τ∇⋅ = ∇⋅ +v (1.28)
que vale en todo punto del sistema continuo, y mientras que la Condición de Salto
está dada por la misma Ec.(1.25). Sin embargo, en muchos estados estacionarios
las superficies de discontinuidad ( )tΣ se mantienen fijas (no se mueven y 0Σ ≡v ),
por lo que la condición de salto se reduce a
[ ] ( )0,n en tψ τ− ⋅ = Σv (1.29)
1.6.4 Ejemplos de Condiciones de Balance Local.
La formulación de restricciones en el movimiento de sistemas continuos constituye
una de las aplicaciones más sencillas de las Condiciones de Balance Local. Como
un ejemplo, a continuación formulamos la condición para que el movimiento sea
isocórico, es decir la condición para que los cuerpos conserven su volumen en su
movimiento. Desde luego esta condición se cumple en el movimiento de
sustancias incompresibles, sean ellas sólidas o fluidas; sin embargo, por
costumbre y para ser mas concretos, en las discusiones que se presentan a
continuación, nos referiremos a un fluido. Se considerarán dos casos: cuando el
movimiento ocurre en el espacio libre (un ‘fluido libre’) y cuando éste solamente
dispone de los huecos que hay en un medio poroso (un ‘fluido en un medio
poroso’).
Para empezar consideremos un cuerpo de un fluido incompresible que llena
completamente el volumen del espacio físico en que se encuentra. En este caso,
el volumen del fluido es igual al volumen del dominio que ocupa el cuerpo. Así:
( )( )
f
B t
V t d x= ∫ (1.30)
Aquí, ( )fV t es el volumen del fluido contenido en el cuerpo y ( )B t es el dominio
del espacio físico (es decir, de 3R ) ocupado por el cuerpo. Observe que una forma
que muestra en forma explicita el integrando en la Ec.(1.30) es
( )( )
1 f
B t
V t d x= ∫ (1.31)
Comparando esta ecuación con la ecuación (1.16), vemos que el volumen del
fluido es una propiedad extensiva y que la propiedad intensiva que le corresponde

19
es 1ψ ≡ . Además, la hipótesis de que el volumen de los cuerpos se conserva
durante el movimiento implica
( ) 0fdVt
dt= (1.32)
Claramente, la Ecuación de Balance Global se satisface tomando 0g = y 0τ ≡ en
la Ec. (1.22). A su vez, esta condición es equivalente a las Ecs.(1.24) y (1.25), con
1ψ ≡ . Estas ecuaciones se reducen a
[ ] 0
0,n en
∇ ⋅ =
⋅ = Σ
v
v (1.33)
La primera es la bien conocida condición de incompresibilidad para un fluido libre y
la segunda implica, dado que n es cualquier dirección, que si un fluido libre es
incompresible la velocidad de sus partículas es necesariamente continua. Por otra
parte, es oportuno mencionar que si bien es cierto que cuando un fluido tiene la
propiedad de ser incompresible, todos los cuerpos de fluido conservan su
volumen, también los fluidos compresibles pueden efectuar algunos movimientos
en que cada cuerpo de fluido conserva su volumen –a esta clase de movimientos
se les llama movimientos isocóricos.
El caso en que el fluido se encuentra en un ‘medio poroso’, es bastante diferente y
menos conocido. Un medio poroso es un material sólido que tiene huecos
distribuidos en toda su extensión (Fig.3), y se supondrá que ellos están
conectados de manera que permiten el movimiento del fluido. Cuando los poros
están llenos de un fluido, se dice que el medio poroso está ‘saturado’. Esta
situación es la de mayor interés en la práctica y es también la más estudiada. En
muchos de los casos que ocurren en las aplicaciones el fluido es agua o petróleo.
A la fracción del volumen del sistema, constituido por la ‘matriz sólida’ y los
huecos, se le llama ‘porosidad’ y se le representará por ' 'ε . Así
( )0
, limV
Volumen de huecos x t
Volumen total ε
→= (1.34)
Aquí hemos escrito ( ),x tε para enfatizar que la porosidad generalmente es
función tanto de la posición como del tiempo. Las variaciones con la posición
pueden ser debidas, por ejemplo, a heterogeneidad del medio y los cambios con el

20
tiempo a su elasticidad; es decir, los cambios de presión del fluido originan
esfuerzos en los porosos que los dilatan o los encogen.
Cuando el medio está saturado, el volumen del fluido ( fV ) es igual al volumen de
los huecos del dominio del espacio físico que ocupa. Así,
( ) ( )( )
,fB t
V t x t dxε= ∫ (1.35)
En vista de esta ecuación la propiedad intensiva asociada al volumen de fluido es
la porosidad, ( ),x tε , por lo que la condición de incomprensibilidad de un fluido
contenido en un medio poroso, está dada por las Ecs.(1.24) y (1.25), con
( ),x tψ ε≡ , 0g = y 0τ = : es decir
( )
( )
0
0,
t
n en
εε
ε Σ
∂ + ∇ ⋅ = ∂
− ⋅ = Σ
v
v v
(1.36)
Que la divergencia de la velocidad sea igual a cero, Ec.(1.33), como condición
para que un fluido libre conserve su volumen, es ampliamente conocida. Sin
embargo, este no es el caso de las Ecs.(1.36), como condición para la
conservación del volumen de los cuerpos de fluido contenidos en un medio
poroso.
En aplicaciones a Geohidrlogía y a Ingeniería Petrolera, las discontinuidades de la
porosidad están asociadas a cambios en los estratos geológicos y por esta razón
están fijas en el espacio; así, 0Σ ≡v . En ese caso
[ ] 0nε ⋅ =v (1.37)
Usando la notación n≡ ⋅nv v para la componente normal de la velocidad y los
subíndices más y menos para los límites por los lado más y menos de Σ ,
respectivamente, la Ec.(1.37) es
ε ε+ −=n+ n-v v (1.38)
Al producto de la porosidad por la velocidad se le conoce con el nombre de
velocidad de Darcy (U ) [ ]; es decir,

21
U ε≡ v (1.39)
Así, las Ecs.(1.37) y (1.38) son
[ ] 0U n⋅ = y U U=n+ n- (1.40)
Por lo tanto, en el caso de fluidos en medios porosos y a diferencia del caso de
fluidos libres, es la velocidad de Darcy la que es continua cuando el flujo es
isocórico. Las Ecs.(1.39) y (1.40) son ampliamente utilizadas en el estudio del
agua subterránea (Geohidrología) y en Ingeniería Petrolera. Ahí, los valores que
toma la porosidad dependen de cada estrato y por lo mismo es frecuente que la
porosidad sea discontinua en la superficie de contacto entre dos estratos
geológicos diferentes. En tal caso, φ φ+ −≠ , por lo que ≠n+ n-v v , necesariamente.
Resumiendo: la velocidad de las partículas de fluido es discontinua en las
superficies de contacto de dos estratos diferentes, sin embargo la velocidad de
Darcy es continua.
1.7 Los Modelos de los Sistemas Continuos de Fases Múltiples
Para poder abordar este tema con una generalidad adecuada, es necesario
empezar por revisar los conceptos de solución, mezcla, componente y fase.
1.7.1 Sistemas Continuos de una y Varias Fases
La diferencia entre mezcla y disolución (o solución), la cual es ampliamente
conocida, puede ayudar a motivar estos conceptos. Por ejemplo, si disolvemos sal
de mesa (cloruro de sodio) en agua pura y aumentamos la sal disuelta por encima
de la concentración de saturación, el exceso de sal se separa. Entonces, esa sal
no disuelta puede mezclarse; por ejemplo, utilizando un mecanismo revolvedor,
hasta formar una mezcla relativamente homogénea. Sin embargo, si esa mezcla
se deja en reposo al poco tiempo veremos que la sal que no se disolvió se mueve
hacia la base del recipiente; es decir, se precipita. En este caso podemos
distinguir dos fases, la fase liquida y la fase sólida. Además, la fase líquida y la
fase sólida se mueven con diferentes velocidades, pues la fase liquida (el agua)
está en reposo, mientras que la fase sólida (la sal no disuelta) se mueve hacia el
fondo del recipiente. Por otra parte, en la fase líquida en que está el agua
podemos distinguir dos componentes: la sal disuelta y el agua. Por estar en la

22
misma fase, estas dos componentes se mueven con la misma velocidad y es por
ello que no se separan aunque las dejemos en reposo durante un tiempo
prolongado.
En la teoría de los sistemas continuos, los modelos para procesos como el que se
acaba de describir, se conceptualizan como se explica a continuación. Se
considera que hay dos fases: la fase líquida (el agua con la sal disuelta) y la fase
sólida (la sal no disuelta). En cada punto del espacio físico ( 3R ) hay una partícula
de cada una de las fases y cada una de ellas se mueve con su propia velocidad.
Por lo mismo, cada dominio de 3R define dos cuerpos, que son los formados por
los conjuntos de partículas correspondientes a cada una de las fases. Además, en
cada punto tenemos definidas dos velocidades, que en general pueden ser
diferentes; por lo tanto los dos cuerpos que en un tiempo dado ocupan el mismo
dominio de 3R , inmediatamente después se separan y en general en otros
tiempos ocuparán dominios que no coinciden. En el caso que nos ocupa la masa
de cada una de las componentes: agua pura, sal disuelta y sal no disuelta, define
una propiedad extensiva cuyo balance está dado por la Ec.(1.22), o en forma
equivalente por las Ecs.(1.28) y (1.29). Note, sin embargo, que en estas últimas
ecuaciones debe utilizarse la velocidad de la fase a la cual está asociada la
componente correspondiente.
1.7.2 Forma General de los Modelos de los Sistemas Continuos
A continuación se explica como se construyen los modelos de los sistemas
continuos multifásicos. Más que los sistemas continuos mismos, se modelan los
procesos que tienen lugar en ellos; por ejemplo, el transporte de calor o el de los
solutos contenidos en un fluido, etc. Ejemplos de sistemas de varias fases son los
yacimientos petroleros [26] y los geotérmicos [27], así como muchos otros.
En primer lugar se identifica un conjunto finito, o familia, de propiedades
extensivas (una, dos, tres, etc.). Además, cada una de ellas se asocia con una, y
solamente una, de las fases del sistema continuo y para cada una de las
propiedades extensivas de esa familia se formula la Condición de Balance Global

23
de la Ec. (1.22), en cada cuerpo del sistema continuo. Esta condición es
equivalente a la Ecuación Diferencial de Balance Local y a la Condición de Salto
de las Ecs. (1.28) y (1.29). El sistema así obtenido, formado por las ecuaciones
diferenciales y las condiciones de salto, constituye el modelo básico del sistema
correspondiente.
1.7.3 Ecuaciones Básicas de los Modelos Continuos
Pasemos ahora a escribir con detalle las ecuaciones que constituyen los modelos
básicos de los sistemas continuos multifásicos. Sea N el número de propiedades
extensivas y M el número de fases que integran el modelo de un sistema
continuo, donde M N≤ . Además, cada propiedad extensiva está asociada a una y
solamente una fase. Las propiedad extensivas y sus correspondientes intensivas
se denotarán por Eα y αψ ( )1,...,Nα = , respectivamente, de manera que
( ) ( )( ) ( )
,B t
E t x t dxβ α
α αψ= ∫ (1.41)
Aquí, ( )β α es la fase asociada a la propiedad extensiva α y ( ) ( )B tβ α
es el
dominio ocupado por le cuerpo de la fase ( )β α . También usaremos gα y ατ para
la generación y el (campo de) flujo de la propiedad α . Por otra parte, ( )β α
v será la
velocidad de la fase ( )β α , a la que está asociada la propiedad extensiva α .
Entonces el modelo básico de los sistemas multifásicos está constituido por las
Condiciones de Balance correspondientes a cada una de las propiedades
intensivas del sistema Aplicando las ecuaciones Ecs.(1.24) y (1.25) se obtiene
( )( ) g
t
αβ α αα αψ
ψ τ∂
+ ∇ ⋅ = ∇ ⋅ +∂
v = 1,...,Nα∀ (1.42)
y las condiciones de salto
( )( ) 0n
β α ααψ τΣ− − =
i v v =1,...,Nα∀ (1.43)
Estas ecuaciones básicas gobiernan a una gran diversidad de sistemas continuos.
En general, interesa construir modelos completos; es decir uno que nos permita
predecir el comportamiento del sistema continuo a que se refiere el modelo. Como
hemos visto los modelos de los sistemas continuos son sistema de ecuaciones
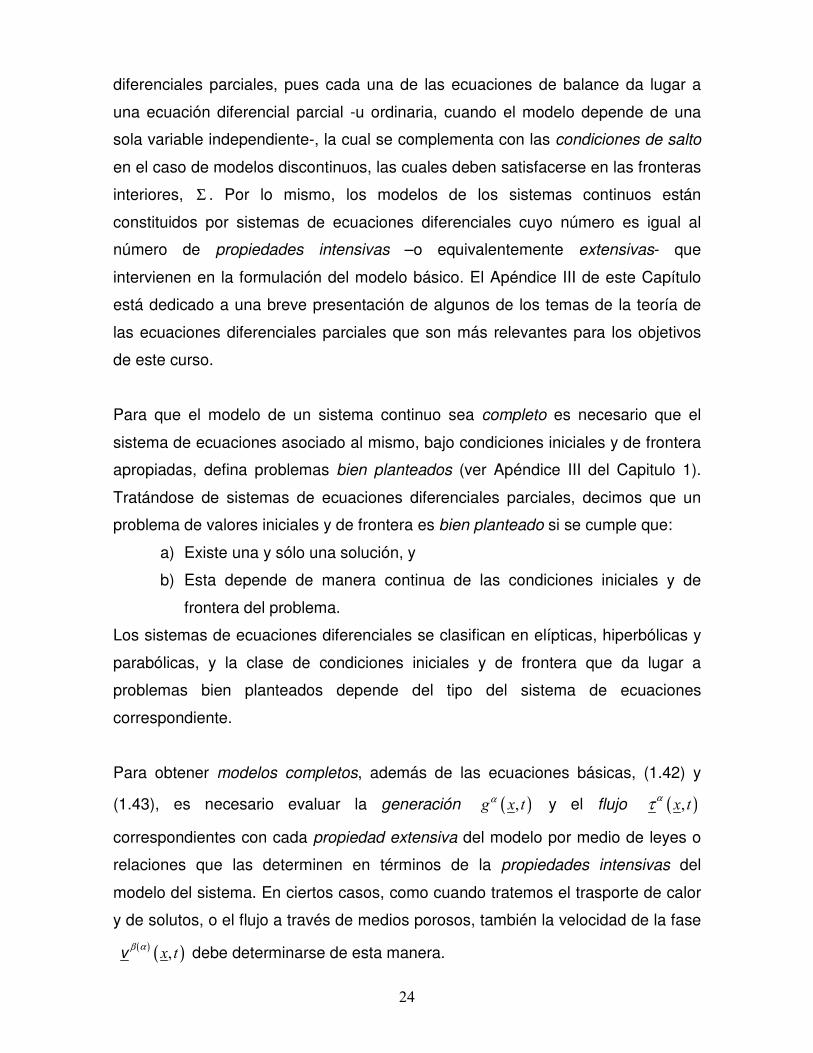
24
diferenciales parciales, pues cada una de las ecuaciones de balance da lugar a
una ecuación diferencial parcial -u ordinaria, cuando el modelo depende de una
sola variable independiente-, la cual se complementa con las condiciones de salto
en el caso de modelos discontinuos, las cuales deben satisfacerse en las fronteras
interiores, Σ . Por lo mismo, los modelos de los sistemas continuos están
constituidos por sistemas de ecuaciones diferenciales cuyo número es igual al
número de propiedades intensivas –o equivalentemente extensivas- que
intervienen en la formulación del modelo básico. El Apéndice III de este Capítulo
está dedicado a una breve presentación de algunos de los temas de la teoría de
las ecuaciones diferenciales parciales que son más relevantes para los objetivos
de este curso.
Para que el modelo de un sistema continuo sea completo es necesario que el
sistema de ecuaciones asociado al mismo, bajo condiciones iniciales y de frontera
apropiadas, defina problemas bien planteados (ver Apéndice III del Capitulo 1).
Tratándose de sistemas de ecuaciones diferenciales parciales, decimos que un
problema de valores iniciales y de frontera es bien planteado si se cumple que:
a) Existe una y sólo una solución, y
b) Esta depende de manera continua de las condiciones iniciales y de
frontera del problema.
Los sistemas de ecuaciones diferenciales se clasifican en elípticas, hiperbólicas y
parabólicas, y la clase de condiciones iniciales y de frontera que da lugar a
problemas bien planteados depende del tipo del sistema de ecuaciones
correspondiente.
Para obtener modelos completos, además de las ecuaciones básicas, (1.42) y
(1.43), es necesario evaluar la generación ( ) ,g x tα y el flujo ( ) ,x tα
τ
correspondientes con cada propiedad extensiva del modelo por medio de leyes o
relaciones que las determinen en términos de la propiedades intensivas del
modelo del sistema. En ciertos casos, como cuando tratemos el trasporte de calor
y de solutos, o el flujo a través de medios porosos, también la velocidad de la fase
( ) ( ) ,x tβ α
v debe determinarse de esta manera.
25
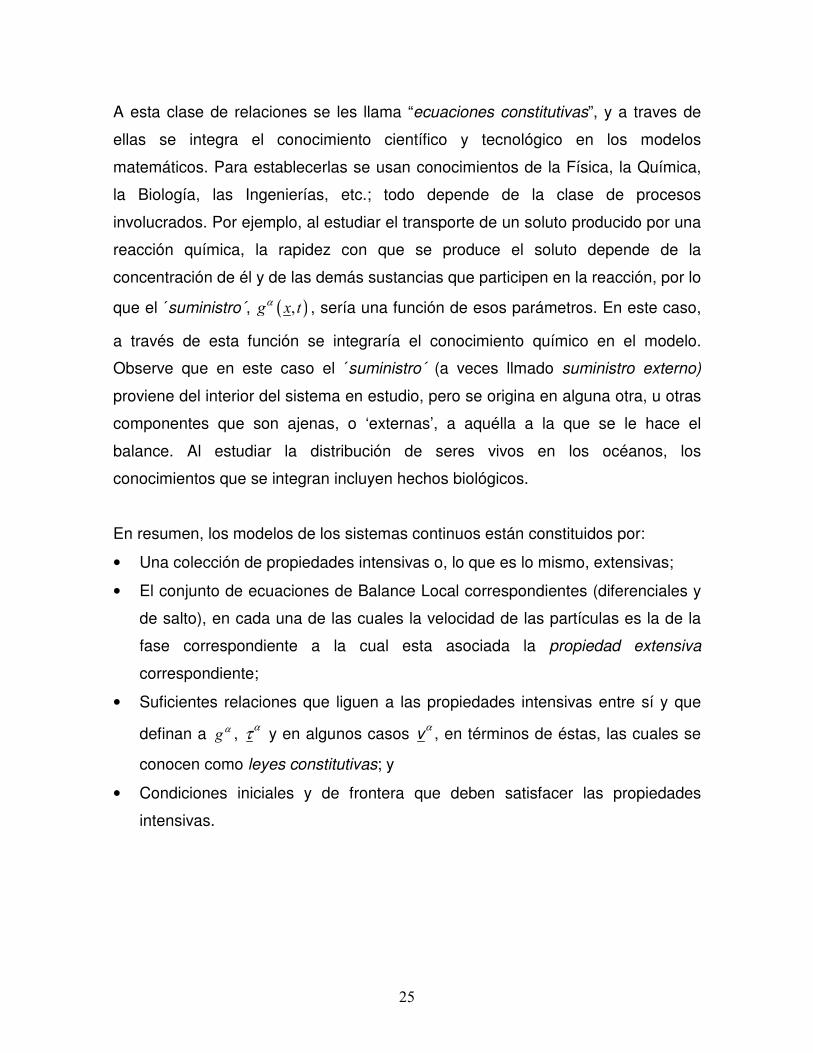
A esta clase de relaciones se les llama “ecuaciones constitutivas”, y a traves de
ellas se integra el conocimiento científico y tecnológico en los modelos
matemáticos. Para establecerlas se usan conocimientos de la Física, la Química,
la Biología, las Ingenierías, etc.; todo depende de la clase de procesos
involucrados. Por ejemplo, al estudiar el transporte de un soluto producido por una
reacción química, la rapidez con que se produce el soluto depende de la
concentración de él y de las demás sustancias que participen en la reacción, por lo
que el ´suministro´, ( ) ,g x tα , sería una función de esos parámetros. En este caso,
a través de esta función se integraría el conocimiento químico en el modelo.
Observe que en este caso el ´suministro´ (a veces llmado suministro externo)
proviene del interior del sistema en estudio, pero se origina en alguna otra, u otras
componentes que son ajenas, o ‘externas’, a aquélla a la que se le hace el
balance. Al estudiar la distribución de seres vivos en los océanos, los
conocimientos que se integran incluyen hechos biológicos.
En resumen, los modelos de los sistemas continuos están constituidos por:
• Una colección de propiedades intensivas o, lo que es lo mismo, extensivas;
• El conjunto de ecuaciones de Balance Local correspondientes (diferenciales y
de salto), en cada una de las cuales la velocidad de las partículas es la de la
fase correspondiente a la cual esta asociada la propiedad extensiva
correspondiente;
• Suficientes relaciones que liguen a las propiedades intensivas entre sí y que
definan a gα , α
τ y en algunos casos α
v , en términos de éstas, las cuales se
conocen como leyes constitutivas; y
• Condiciones iniciales y de frontera que deben satisfacer las propiedades
intensivas.

26
APÉNDICE I
ALGUNOS RESULTADOS DEL CÁLCULO
Algunos resultados del Cálculo Diferencial e Integral, serán de gran utilidad en
desarrollos subsecuentes [28-36]. El primero de ellos, el “Teorema de Gauss” o
“Teorema de la Divergencia”, el cual se deriva fácilmente del “Teorema de Green”.
Este último es una generalización del “Teorema Fundamental del Cálculo” –que
establece que la integral de la derivada es la función primitiva-, a funciones de
varias variables.
Para vectores de n-componentes adoptamos la notación 1( ,..., )nu u u≡ . Sea
1( ,..., )nu x x una función vectorial de n-variables; su divergencia se define por
1
i ni
i i
uu
x
=
=
∂∇ =
∂∑i A(1.1)
También, en lo que sigue Ω denota un dominio del espacio Euclidiano de n
dimensiones, en el sentido de Ciarlet [18]. una partición, también llamada
descomposición de Ω, es una colección de subdominios de Ω, donde para cada
1,...,i E= , iΩ ⊂ Ω , tal que φ=Ω∩Ω ji siempre que ji ≠ , y con la propiedad de
que la cerradura de 1
i E
i
i
=
=
Ω∪ contiene a Ω. Además en lo que sigue, con referencia a
una partición de Ω , Σ denota el complemento cerrado –con respecto a ∪Ei
i
i
=
=
Ω∂1
- de
∂Ω (ver Fig. ). Nos referiremos a la frontera ∂Ω como la ‘frontera exterior’,
mientras que Σ será la ‘frontera interior’. Esta frontera interior siempre se
supondrá que ha sido orientada; es decir, que en ella se han definido un lado
positivo y uno negativo. Sin embargo, esta orientación puede definirse de manera
arbitraria, pues los resultados que se presentarán se verá que son invariantes
frente a un cambio de orientación. El vector normal unitario n , en la frontera
exterior se tomará apuntando hacia fuera de Ω y en la frontera interior apuntando
hacia el lado positivo. Dada una partición de Ω y una función definida en Ω,
decimos que ella es continua por partes cuando, para cada 1,...,i E= , su
restricción a iΩ es continua y se puede extender de manera continua a la

27
cerradura de iΩ . Note que cuando una función es continua por partes su límite por
el lado positivo, y también por el lado negativo, existe. Si ( )f x es una función
continua por partes escribiremos, en Σ ,
f f f+ −≡ − A(1.2)
Aquí, f+ y f− son los límites respectivos. A la función f definida en Σ , salvo
posiblemente en esquinas donde más de dos subdominios de la partición se
encuentren, se le llamará el ‘salto de la función’.
A.1.- El Teorema de Green [28-36].
Sea 1( ,..., )nf x x una función de n-variables, continua y con primeras derivadas
continuas en la cerradura de Ω . Entonces
( ) ( ) i
i
fx d x f x n d x
xΩ ∂Ω
∂=
∂∫ ∫ A(1.3)
donde ),...,( 1 nnnn = es el vector normal unitario, que apunta hacia el exterior de
Ω .
A.2.- El Teorema de Gauss o de la Divergencia [28-36].
Sea 1( ,..., )nu x x una función de n-variables, cuyos valores son vectores de n-
componentes, continua y con primeras derivadas continuas en la cerradura de Ω .
Entonces
ud x u nd xΩ ∂Ω
∇ =∫ ∫i i A(1.4)
Prueba.- El Teorema de la Divergencia es una consecuencia inmediata de la
Ec.A(1.3). Escribiendo
1 1
i n i ni
i i
i ii
uud x dx u n dx u nd x
x
= =
= =Ω Ω ∂Ω ∂Ω
∂∇ = = =
∂∑ ∑∫ ∫ ∫ ∫i i A(1.5)
Una versión más general del Teorema de Gauss, aplicable a campos vectoriales
continuos por partes y con primeras derivadas también continuas por partes, se
presenta a continuación.

28
Una versión más general del Teorema de Gauss, aplicable a campos vectoriales
continuos por partes y con primeras derivadas también continuas por partes, se
presenta a continuación. Más específicamente, supondremos que la función
vectorial u y su primera derivada, son continuas en cada una de las subregiones
,..., 1 NΩΩ , separadamente.
A.3.- Teorema de Gauss generalizado
Sea 1( ,..., )nu x x una función de n-variables, cuyos valores son vectores de n-
componentes, continua por partes y con primeras derivadas continuas por partes
en Ω . Entonces
ud x u n d x u n d x∂ Σ
Ω ∂Ω Σ
∇ = −∫ ∫ ∫i i i A(1.6)
Prueba.
1 1
E E
ud x ud x u nd x u nd x u nd x
α αα α= =Ω Ω ∂Ω ∂Ω Σ
∇ = ∇ = = −∑ ∑∫ ∫ ∫ ∫ ∫i i i i i A(1.7)
Excepto la última igualdad, las demás son inmediatas por aplicación d el Teorema
de Gauss en cada uno de los subdominios de la partición separadamente. Para
derivar la última de esas igualdades, dado cualquier punto de Σ , denotaremos por
+Ω y −Ω a los subdominios que se encuentran en el lado positivo y en el negativo,
respectivamente, mientras que n+ y n− serán las normales unitarias que apuntan
hacia fuera de dichos subdominios. Observe además que 1
E
αα =
∂Ω = ∂Ω ∪ Σ∪ y que
( )1
E
u nd x u nd x u n u n d x
αα
+ + − −= ∂Ω ∂Ω Σ
= + +∑ ∫ ∫ ∫i i i i A(1.8)
Sin embargo, de acuerdo con la convención adoptada, n n+ = y n n− = − en Σ , por
lo que al sustituir se obtiene
( )
1
E
u nd x u nd x u u nd x u nd x u nd x
αα
+ −= ∂Ω ∂Ω Σ ∂Ω Σ
= − − = −∑ ∫ ∫ ∫ ∫ ∫i i i i i A(1.9)

29
CAPÍTULO 1
APÉNDICE II
Derivada de una Integral cuando la Región de Integración Depende de un
Parámetro.
Teorema A2. 1. Sea ψ(x, t) una función continua y con primera derivada continua
y ( )B t el dominio ocupado por un cuerpo, el cual depende del parámetro t . Defina
( )
( ) ( , )B t
E t x t d xψ≡ ∫ A(2.1)
Entonces
( )( )
( ) ( , )B t
dEt x t d x
dt t
ψψ
∂ = + ∇
∂ ∫ i v A(2.2)
y también
( )( ) ( )
( ) ,B t B t
dEt x t dx ndx
dt t
ψψ
∂
∂= +
∂∫ ∫ iv A(2.3)
Demostración.- La Ec. A(2.1) es equivalente a
( ) ( , ) ( , )E t X t J X t d Xφ≡ ∫B
A(2.4)
donde B es el dominio ocupado por el cuerpo en la configuración de referencia.
Desde luego B es independiente del tiempo. Además, aquí ( , )J X t es el
determinante de la matriz Jacobiana; es decir,
1 1 1
1 2 3
2 2 2
1 2 3
3 3 3
1 2 3
( , )
p p p
X X X
p p pJ X t Det
X X X
p p p
X X X
∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂
≡ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
A(2.5)
Derivando la Ec. A(2.4) se obtiene
( ) ( , ) ( , ) ( , ) ( , ) ( , ) ( , )t t
dEt X t J X t d X X t J X t X t J X t d X
dt tφ φ φ
∂= = +
∂∫ ∫B B
A(2.6)
Escribiendo ( , )t X tφ en términos de la derivada material:
( ) ( ) ( ) ( )( , ) , , , ,t
DX t x t x t x t x t
Dt t
ψ ψφ ψ
∂= ≡ + ∇
∂iv A(2.7)
Por otra parte, aplicando la formula de la derivada de un determinante se obtiene

30
2 2
1 1 1 1 1 1
1 2 3 1 2 3
2 2
2 2 2 2 2 2
1 2 2 1 2 3
2 2
3 3 3 3 3 3
1 2 3 1 2 3( , )
t
p p p p p p
t X X X X t X X
p p p p p pDet Det
t X X X X t X X
p p p p p p
t X X X X t X XJ X t
∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
+ + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
≡2
1 1 1
1 2 3
2
2 2 2
1 2 3
2
3 3 3
1 2 3
p p p
X X t X
p p pDet
X X t X
p p p
X X t X
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
A(2.8)
Además, la representación Lagrangeana de la velocidad satisface
( ) ( ), ,p
V X t X tt
∂≡
∂ A(2.9)
Así
1 1 1 1 1 1 1 1 1
1 2 3 1 2 3 1 2 3
2 2 2 2 2 2 2 2 2
1 2 2 1 2 3 1 2
3 3 3 3 3 3
1 2 3 1 2 3
( , )t
V p p p V p p p V
X X X X X X X X X
V p p p V p p p VJ X t Det Det Det
X X X X X X X X
V p p p V p
X X X X X X
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
≡ + + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
3
3 3 3
1 2 3
X
p p V
X X X
∂ ∂ ∂ ∂ ∂ ∂ ∂
A(2.10)
Tomemos ahora a la configuración en el tiempo t como configuración de
referencia. En tal caso
( ) ( ) ( ) ( )( ) ( ), , , 1 , , , ,iij
j
pp X t X , J X t y V X t p X t t X t
Xδ
∂= = = = =
∂v v A(2.11)
Sustituyendo en la Ec.(2.10) se tiene
11 1
31 2
2 2 2
1 2 3
3 3 3
1 2 3
1 00 0 1 0
( , ) 1 0 0 0 0 1
0 1 0 1 0 0
t
xx x
J X t Det Det Detx x x
x x x
∂∂ ∂
∂∂ ∂ ∂ ∂ ∂
≡ + + = ∇ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂
i
vv v
v v vv
v v v
A(2.12)
Por lo que la Ec. A(13) es
( ) ( ) ( ) ( )( )
( ) ( , ) , , , ,B t
dEt x t x t x t x t x t d x
dt t
ψψ ψ
∂ = + ∇ + ∇
∂ ∫ i iv v A(2.13)

31
Esta ecuación es equivalente a la Ec. A(2.1), que deseábamos demostrar.
Finalmente, aplicando a esta ecuación el Teorema de Gauss (ver Apéndice I de
este Capítulo) se obtiene la Ec. A(2.3).
Teorema A2. 2. Sea ψ(x, t) una función continua por partes, con respecto a una
partición para la cual ( )tΣ es la frontera interior, y con primeras derivadas
continuas por partes. Además, sea ( )B t el dominio ocupado por un cuerpo, el cual
depende del parámetro t y suponga que la definición de la Ec. A(2.1) es válida.
Entonces
( )( )
( )( )
( ) ( , )B t t
dEt x t dx ndx
dt t
ψψ ψ Σ
Σ
∂ = + ∇ + −
∂ ∫ ∫ i i v v v A(2.14)
Aquí, Σv es la velocidad de la superficie Σ .
Demostración.- Para cada tiempo t , sea ( ) ( ) 1 ,..., EB t B t la atrición de ( )B t .
Observe que la Ec. A(2.1) puede escribirse como
( )1
( ) ( , )E
B t
E t x t d x
αα
ψ=
=∑ ∫ A(2.15)
Entonces aplicando la Ec. A(2.3) en cada subdominio ( )B tα de la partición, se
obtiene
( )( ) ( )1
( ) ,E
B t B t
dEt x t dx ndx
dt tα α
α
ψψ
= ∂
∂ = +
∂ ∑ ∫ ∫ iv A(2.16)
O, en otra forma
( )
( ) ( )1
( ) ,E
B t B t
dEt x t dx ndx
dt tα
α
ψψ
= ∂
∂=
∂∑∫ ∫ iv
A(2.17)
Note que
( ) ( )
( ) ( )
( )1
E
B t B t t B t t
ndx ndx ndx ndx ndx
αα
ψ ψ ψ ψ ψΣ Σ
= ∂ ∂ Σ ∂ Σ
= − = −∑ ∫ ∫ ∫ ∫ ∫i i i i iv v v v v A(2.18)
Por otra parte:
( )
( )( )
( )B t B t t
ndx dx ndxψ ψ ψ∂ Σ
= ∇ +∫ ∫ ∫i i iv v v A(2.19)
Sustituyendo esta ecuación en A(2.18) se obtiene

32
( )
( )( )
( )( )1
E
B t B t t
ndx dx ndx
αα
ψ ψ ψ Σ
= ∂ Σ
= ∇ + −∑ ∫ ∫ ∫ i i i v v v v A(2.20)
Combinando esta ecuación con la Ec. A(2.17) se deriva la Ec. A(2.14) propuesta.

33
APÉNDICE III
Ecuaciones Diferenciales Parciales
El estudio de las ecuaciones diferenciales parciales y de los sistemas de tales
ecuaciones, es fundamental en la modelación matemática y computacional de los
sistemas continuos. Debido a su importancia, en las Referencias de este Capítulo
se incluyen un buen número de textos básicos sobre este tema. En este Apéndice
solamente se tocan algunos de los resultados sobre su clasificación, en relación
con los ‘problemas bien planteados’ que se consideran más importantes.
A.3.1. Clasificación
Es importante clasificar a las ecuaciones diferenciales parciales porque muchas de
sus propiedades son comunes a los miembros de cada clases. Así, su
clasificación es un instrumento para alcanzar el objetivo de unidad conceptual que
nos hemos propuesto en este curso.
Las ecuaciones diferenciales parciales, así como los sistemas de tales
ecuaciones, se clasifican en elípticas, hiperbólicas y parabólicas. Pero debe
señalarse que esta clasificación no es exhaustiva; es decir, existen sistemas de
ecuaciones diferenciales que no pertenecen a ninguna de estas categorías. Sin
embargo, casi todos los modelos de los sistemas continuos que han recibido
mayor atención hasta ahora dan lugar a ecuaciones de alguno de estos tipos; en
particular, una gran parte de los sistemas continuos que se estudian en la
presente monografía están gobernados por ecuaciones de segundo orden de
alguna de las clases mencionadas. Por ello este Apéndice examina principalmente
tales ecuaciones, poniendo énfasis en aquéllas que son lineales. Debe
mencionarse que el transporte no-difusivo de solutos, tanto en fluidos libres como
en medios porosos, da lugar a ecuaciones de primer orden que generalmente se
les considera como hiperbólicos [37]. Muchas de las referencias relativas a
ecuaciones diferenciales parciales que se dan al final de este Capítulo contienen
exposiciones amplias de este tema [37-46]. Además, los modelos de los sólidos
elásticos, los fluidos libres y de los yacimientos petroleros, están constituidos por
sistemas de ecuaciones diferenciales parciales. En este caso también, en las

34
referencias de este Capítulo se pueden encontrar discusiones relativas a los
sistemas de ecuaciones correspondientes [25, 26, 47, 48].
Utilizaremos la notación Ω para un dominio en R n , donde n es el número de
variables independientes de las que depende la solución buscada. Toda ecuación
diferencial lineal de segundo orden puede escribirse en la forma
( ) ( )u a u bu cu fΩ≡ ∇ ∇ + ∇ + =i i iL A(3.1)
Aquí para cada x , ( )a x es un matriz simétrica, ( )b x es un vector y ( )c x un
escalar (es decir, un número real). Definido así, L es el operador diferencial lineal
más general de segundo orden. Los elementos de la matriz a y del vector b se
denotarán por ija y ib , , 1,...,i j n= , respectivamente, de manera que la Ec. (3.1) es
equivalente a
2
1 1 1
n n n
ij i
i j ii j i
u uu a b cu f
x x xΩ
= = =
∂ ∂≡ + + =
∂ ∂ ∂∑∑ ∑L A(3.2)
Debido a que la matriz ( )a x es simétrica, ella posee una base de vectores propios
(o eigenvectores). Entonces, se dice que el operador es:
I. Elíptico, cuando todos los valores propios tienen el mismo signo;
II. Hiperbólico, cuando todos los valores propios tienen el mismo signo, excepto
uno, el cual tiene signo contrario a los demás; y
III. Parabólico, cuando todos los valores propios tienen el mismo signo, excepto
uno, el cual es cero.
Un caso particular, de interés especial, es cuando el número de variables
independientes es dos ( )2n = . Entonces la Ec. A(3.2) es
22 2 2
1 1 1
ij i
i j ii j i
u ua b cu fx x x
Ω= = =
∂ ∂+ + =
∂ ∂ ∂∑∑ ∑ A(3.3)
Tomando en cuenta que 12 21a a= , es fácil ver que las condiciones anteriores son
equivalentes a:

35
2
12 11 22
2
12 11 22
2
12 11 22
. 0
0
0
I Elíptico a a a
II. Hiperbólico a a a
III. Parabólico a a a
⇔ − <
⇔ − >
⇔ − =
Cuando solamente se tratan ecuaciones en dos variables independientes, es
habitual utilizar una notación en la que se realizan las siguientes sustituciones:
11a a→ , 12 21a a b= → y 22a c→ , por lo que las condiciones se escriben
2
2
2
. 0
0
0
I Elíptico b ac
II. Hiperbólico b ac
III. Parabólico b ac
⇔ − <
⇔ − >
⇔ − =
A.3.2 Formas Canónicas de los Diferentes Tipos
Cuando los coeficientes en la Ec. A(3.1) son constantes (y 0fΩ ≡ ), por un cambio
lineal de coordenadas es siempre posible transformarla en alguna de las
siguientes formas:
2
2
0
0
0
u términos de 1er orden
uu términos de 1er orden
t
uu otros términos de 1er orden
t
∆ + =
∂− ∆ + =
∂
∂− ∆ + =
∂
A(3.4)
Ellas corresponden a los casos elíptico, hiperbólico y parabólico, respectivamente.
En estos últimos dos casos, al escribir las Ecs. A(3.4) se ha introducido la variable
t , a la que nos referiremos como el ‘tiempo’, para denotar a aquélla cuyo eje
coordenado tiene la dirección del eigenvector cuyo valor propio es diferente a los
demás. Este cambio de notación implica que ahora el número de variables
independientes es 1n + . Cuando los términos de menor orden, en la Ec. A(3.4) se
anulan, ellas se reducen a las siguientes ecuaciones diferenciales
2
2
0
0
0
u
uu
t
uu
t
∆ =
∂− ∆ =
∂
∂− ∆ =
∂
(3.5)
A estas ecuaciones se les conoce con los nombres de: Ecuación de Laplace,
Ecuación de Onda y Ecuación del Calor, respectivamente. También, es habitual

36
referirse a ellas como ‘las formas canónicas’ de los diferentes tipos de ecuaciones
diferenciales de segundo orden.
A.3.3. Problemas Bien Planteados
En general las ecuaciones diferenciales parciales tienen muchas soluciones, por lo
que es necesario complementarlas con condiciones de frontera y/o iniciales. A las
condiciones de ‘frontera’ también se les llama de ‘borde’. Los problemas de
condiciones de frontera, o borde, se considerarán formulados en un dominio Ω y
las condiciones de frontera se imponen en su frontera exterior ∂Ω (Fig. ). Cuando
en la ecuación diferencial interviene el tiempo, como en la ecuación de onda o la
del calor, además se incluyen condiciones iniciales. Una observación interesante
es que si consideramos el espacio Euclideano 1nR + (espacio-tiempo), tomando
1nx t+ ≡ , entonces a las condiciones iniciales se les puede interpretar como
condiciones en la frontera del dominio en que está formulado el problema.
Un problema de condiciones de frontera y/o iniciales se dice que es ‘bien
planteado’ cuando tiene una y solamente una solución, y además ella depende de
manera continua de las condiciones de frontera e iniciales, cuando las hay. Una de
las obras más completas en la que se establecen problemas bien planteados para
los diferentes tipos de ecuaciones, no solamente de orden dos sino de orden más
alto, es la clásica de Lions y Magenes [41].
Para el caso elíptico de segundo orden, cuya forma canónica es la Ecuación de
Laplace, el problema se plantea en un dominio Ω de nR , con frontera ∂Ω .
Entonces, algunos de los problemas bien planteados corresponden a problemas
con condiciones de frontera (o contorno) de alguno de los siguientes tipos
A. Dirichlet: se prescribe la función en ∂Ω ;
B. Neuman: se prescribe la derivada normal en ∂Ω ; y
C. Robin: se prescribe la combinación lineal
2 2, 1u
u en , donde n
α β α β∂
+ ∂Ω + =∂
A(3.6)

37
Note que las condiciones de frontera de los casos )A y )B , son casos particulares
de )C .
Los problemas bien planteados para la Ecuación del Calor y la Ecuación de Onda
ilustran lo que es típico para las ecuaciones parabólicas e hiperbolicas,
respectivamente. En ambos casos el problema se plantea en el dominio [ )0,Ω× ∞ ,
o en [ ]0,TΩ× , donde 0T > y las condiciones de frontera son de alguno de los
tipos )A , )B o )C y se deben satisfacer en [ )0,∂Ω× ∞ , o en [ ]0,T∂Ω× . En el caso
de la Ecuación del Calor, además se prescribe el valor ( ),0u x para toda x∈Ω .
Por lo que respecta a la Ecuación de Onda, además se prescriben los valores
iniciales de la función y de su derivada parcial con respecto al tiempo: ( ),0u x y
( ),0u t x∂ ∂ , respectivamente, para toda x∈Ω .

38
REFERENCIAS CAPÍTULO 1
1. Truesdell, C. “The rational mechanics of materials-past, present, future”, Applied
Mech. Rev. 12, 75-80, 1959. Reprinted in Applied Mechanics Surveys 22, Washington:
Spartan Books, 1965.
2. Truesdell, C. “A program toward rediscovering the rational mechanics of the age of
reason”, Arch. Hist. Exact Sc. 1, 3-36, 1960. Corrected reprint in Essays in the History
of Mechanics 22. Berlin-Heidelberg-New York: Springer-Verlag 1968.
3. Truesdell, C. and R. Toupin “The classical field theories”. In Vol. 13 (12, 15, 16, 17,
18, 19, 71, 72, 73) of the Handbuch der Physik, edited by S. Flügge. Berlin-Göttingen-
Heidelberg: Springer-Verlag, 1960.
4. Truesdell, C. “The Elements of Continuum Mechanics”, Berlin-Heidelberg-New York:
Springer, (27), 1966.
5. Noll, W. “The foundations of mechanics and thermodynamics (selected papers by W.
Noll, with a preface by C. Truesdell)”, Berlin-Heidelberg-Berlin: Springe-Verlag, 1974.
6. Eringen, A.C. “Mechanics of Continua”, 2nd
ed., Huntington, New York: Krieger,
Krieger, 1980.
7. Eringen, A.C. and Craine, R.E., J.D. “Continuum theories of mixtures: basic theory and
historical development”, Q. J. Mech. Appl. Math., 29(2), 209-244, 1976.
8. Allen, M.B., Herrera, I. and Pinder, G.F. “Numerical modeling in science and
engineering”, John Wiley & Sons. 418 p., 1988.
9. Hunter, S.C. “Mechanics of Continuous Media”, Ellis Horwood, 1976.
10. Hutter, K. and Jöhnk, K. “Continuum Methods of Physical Modeling”, Springer-Verlag
Berlin Heidelberg, 2004.
11. Malvern, L. E. “Engineering mechanics”.
12. Malvern, L. E. “Introduction to the Mechanics of a Continuous Medium” Prentice Hall
College Div; Facsimile edition (June 1977) (ISBN: 0134876032).
13. Marsden J. E., Hughes T. R.J. “Mathematical Foundations of Elasticity” Dover Pubns;
556 p. reprint edition March 1994. (ISBN: 0486678652)
14. Oliver X. and Agelet C. “Mecánica de medios continuos para ingenieros”, Alfaomega,
Edicions UPC, S.L. Universitat Politècnica de Catalunya. 329p., 2005
15. Spencer, A.J. M. “Continuum Mechanics, Longman, 1980.
16. Wang, C. C., “Mathematical Principles of Mechanics and
Electromagnetism”, Plenum Press, 1979.
17. Truesdell, C. “A First Course in Rational Continuum Mechanics”, Vol. 1, New York,
Academic Press., 1977.
18. Ciarlet, P.G. and Lions J.L. “Handbook of Numerical Analysis”, Vol. II Finite Element
Methods (Part 1), Elsevier Science, B.V. 928 p., 1991.
19. Herrera, I., Galindo, A. y Camacho, R. “Shock Modelling in Variable Bubble Point
Problems of Petroleum Engineering". Computational Modelling of Free and Moving

39
Boundary Problems, Vol. 1: Fluid Flow, Eds. L.C. Wrobel and C.A. Brebbia, CMP, pp.
399-415, 1991.
20. Herrera, I., Camacho, R. y Galindo, A. "Shock Modelling in Petroleum Engineering",
Chapter 7 of the book Computational Methods for Moving Boundary Problems in Heat
and Fluid Flow, Eds.: L.C. Wrobel and C.A. Brebbia, pp. 143-170, CMP Elsevier
Applied Science, 1993.
21. Herrera, I., Camacho, R. y Galindo, A. "Mechanisms of Shock Generation in Variable
Bubble Point Systems". Computational Modelling of Free and Moving Boundary
Problems, Vol. 2, Computational Mechanics Publicactions, Southampton & Boston, pp.
435-453, 1993.
22. Herrera, I. y Chargoy, L. "Shocks in Solution Gas-Drive Reservoirs". SPE Thirteenth
Symposium in Reservoir Simulation, San Antonio, Paper No. SPE 029136, pp. 429-
440, 1995.
23. Herrera, I. “Shocks and Bifurcations in Black-Oil Models”, SPE Journal 1(1), pp. 51-
58, 1996.
24. Herrera, I., y Camacho, R.G. “A Consistent Approach to Variable Bubble-Point
Systems”, Numerical Methods for Partial Differential Equations. 13, pp. 1-18, 1997.
25. Meyer R. E. “Introduction to Mathematical Fluid Dynamics” Dover Pubns; October
1982 (ISBN: 0486615545).
26. Aziz, K., Settari A., “Petroleum Reservoir Simulation”, Applied
Science Publishers, London 1979.
27. Herrera I., Montalvo A., “Modelos Matemáticos de Campos Geotérmicos
Comunicaciones Técnicas”, IIMAS-UNAM, AN-295, 1982.
28. Apostol, T. M. Calculus , Volumen 1. México: Ed. Reverté, 2001
29. Courant, R., John, F., Introducción al Cálculo y al Análisis Matemático, Vol. 2,
México: Limusa, 1974.
30. Kraut, E.A. “Fundamentals of Mathematical Pysics”, McGraw-Hill Book Co., New
York, 1967.
31. Lang, S. Calculus of Several Variables , New York: Springer,1987.
32. Mardsen J., Tromba, A. Cálculo Vectorial, México: Adison-Wesley, Pearson
Educación, 1998.
33. Margenau, H. and Murphy, G.M. “The mathematics of Physics and Chemistry”, D. Van
Nostrand, Inc. Toronto, New York, London, 1948.
34. Pita Ruiz, C. Cálculo Vectorial 1° edición Ed. Prentice-Hall Hispanoamericana S.A.
35. Thomas, G. B., Finney, R. L., Cálculo: Varias Variables. Adison-Wesley, Longman,
1999.
36. Thomas, G.B. “Calculus and Analytic Geometry”, Addison-Wesley Publishing Co.
40
Reading, Massachusetts, 1956.
37. Garabedian P.R. “Partial Differential Equations”, John Wiley, New York, 1964.
38. Hellwig G. “Partial Differential Equations: An Introduction”, Blaisdell Publishing
Co.(Ginn & Co.), New York, 1964.
39. Courant R. and Hilbert D. “Methods of Mathematical Physics”, Vol. I., Interscience
Publishers, New York, 1953.
40. Courant R. and Hilbert D. “Methods of Mathematical Physics”, Vol. II: Partial
Differential Equations, Interscience Publishers, John Wiley, New York, 1962.
41. Lions, J.L. and Magenes, E. “Non-homogeneous Boundary Value Problems and
Applications”, Springer-Verlag, New York, Heildelberg, Berlin (3 volumes), 1972
42. Taylor, M.E. “Partial Differential Equations: BasicTheory”, Texts in Applied
Mathematics 23, Springer, New York, 1996.
43. Treves, F., “Basic Linear Partial Differential Equations”, Academic Press, 1975.
44. Thomas, J.W. “Numerical Partial Differential Equations: Finite Different Methods”,
Text in Applied Mathematics 22, Springer-Verlag, New York, 1995.
45. Tychonov and Samarski, A.A. “Partial Differential Equations of Mathematical
Physics”, Holden-Day, Inc., San Francisco, London, 1964.
46. Thomas, J.W. “Numerical Partial Differential Equations: Conservation Laws and
Elliptic Equations”, Texts in Applied Mathematics 33, Springer-Verlag, New York,
1999.
47. Sokolnikoff, I.S., “Mathematical Theory of Elasticity” McGraw-Hill Book Co., New
York, 1956.
48. Ewing, W.M., Jardewsky, W.S. and Press, F. “Elastic Waves in Layered Media” 380
p., McGraw Hill Book Co., Inc. 1957