ondas y rotaciones -...
TRANSCRIPT

Ondas y Rotaciones Resumen 2. Hojas de trabajo 20-26
Jaime Feliciano Hernández
Universidad Autónoma Metropolitana - Iztapalapa México, D. F. 15 de agosto de 2012
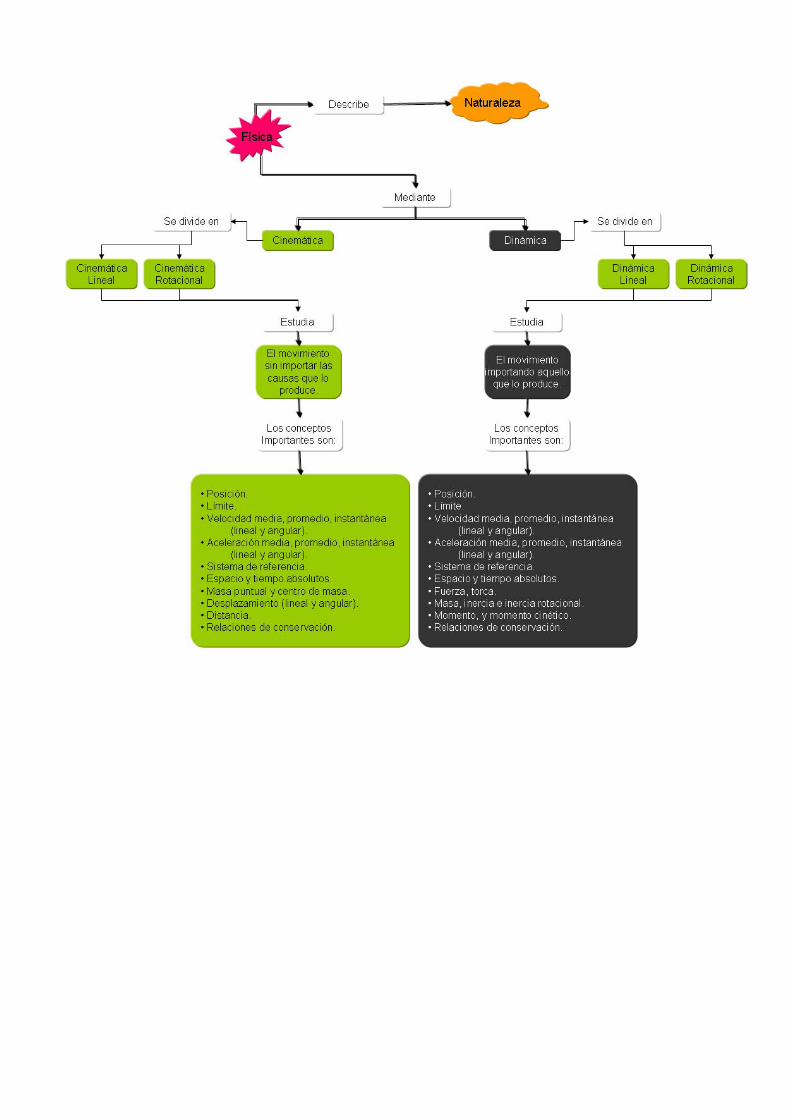
RESUMEN 2. La Cinemática Rotacional es una generalización del estudio de los movimientos lineales que se estudian normalmente. En la Cinemática transnacional nos ocupamos de la pura descripción del fenómeno del movimiento sin detenernos en las causas que los producen. Como consecuencia de ello surge la necesidad del concepto de partícula, que ayuda a describir los fenómenos quitando el problema de las estructuras de los cuerpos y de los movimientos complejos. Con la idea de partícula, es como si toda la masa estuviera concentrada en un punto, el cual se generalizará en las diferentes cinemáticas para movimientos complejos como las rotaciones o las vibraciones y oscilaciones. Precisamente, en el estudio de los cuerpos en rotación debemos pensar en la estructura de los objetos, pues no tendría mucho sentido estudiar la rotación de puntos materiales. Es así que en la Física de las rotaciones, necesitamos introducir una noción que generalice al de partícula. Esa idea es la de centro de masa. Ahora, desde esta perspectiva podemos considerar las dimensiones de un cuerpo a partir del estudio de un sistema de partículas. Un cuerpo sólido será un sistema de partículas muy cercanas entre sí, y cuyas masas juntas conforman al objeto total. Así pues, hemos visto que existe un punto especial en los cuerpos, que es el centro de masa, y también puede ser considerado como si toda la masa de un cuerpo sólido o de un sistema de partículas estuviera concentrada en ese punto. La forma de calcular su posición es mediante la fórmula:
∑=
=++++++++
=N
jjj
N
NNcm rm
Mmmmmrmrmrmrm
r1321
332211 1 r
L
rL
rrr
Donde es la masa total de todas las partículas que
componen el sistema. El vector localiza el llamado centro de masa del sistema, y determina la posición de una partícula virtual, es decir que no existe en la realidad, pero que parecería que concentra la masa total del sistema. Es como si toda la masa se estuviera concentrada en esa posición.
NmmmmM ++++= L321
cmr

Si separamos las componentes del vector de posición, tenemos las tres coordenadas para el centro de masa:
∑=
=++++++++
=N
jjj
N
NNcm xm
Mmmmmxmxmxmxm
x1321
332211 1L
L
∑=
=++++++++
=N
jjj
N
NNcm ym
Mmmmmymymymym
y1321
332211 1L
L
∑=
=++++++++
=N
jjj
N
NNcm zm
Mmmmmzmzmzmzm
z1321
332211 1L
L
Un cuerpo en rotación, requiere de un eje de rotación alrededor del cual gira. En una rotación, todos los puntos de la línea que une al origen con el punto P con el eje de rotación se mueven conservando el mismo ángulo.
Cualquier punto en esa línea de referencia describe un círculo en su movimiento de rotación. Esta regularidad en la Naturaleza de los objetos sólidos que rotan es muy importante porque nos permite definir una propiedad muy útil. Así se puede empezar a definir las variables importantes en el movimiento de rotación, como la variación de los ángulos de giro. En base a esta propiedad de los giros, podemos definir la velocidad angular media como:
ttt ΔΔΘ
=−Θ−Θ
≡12
12ω
Esta expresión nos dice que la rapidez angular media está dada por el cambio en el ángulo con respecto al cambio en el tiempo; es decir, se trata de una razón de cambio del ángulo con respecto al tiempo. Nuevamente se trata de una proporción. También podemos definir la aceleración angular media como la variación de la velocidad angular media:
ttt ΔΔ
=−−
≡ωωω
α12
12
Y de forma enteramente análoga al caso de la Cinemática translacional, se puede definir la velocidad angular instantánea como:
dtd
tt
Θ=
ΔΔΘ
≡→Δ 0
limω
Y la aceleración angular instantánea:
dtd
tt
ωωα =ΔΔ
≡→Δ 0
lim
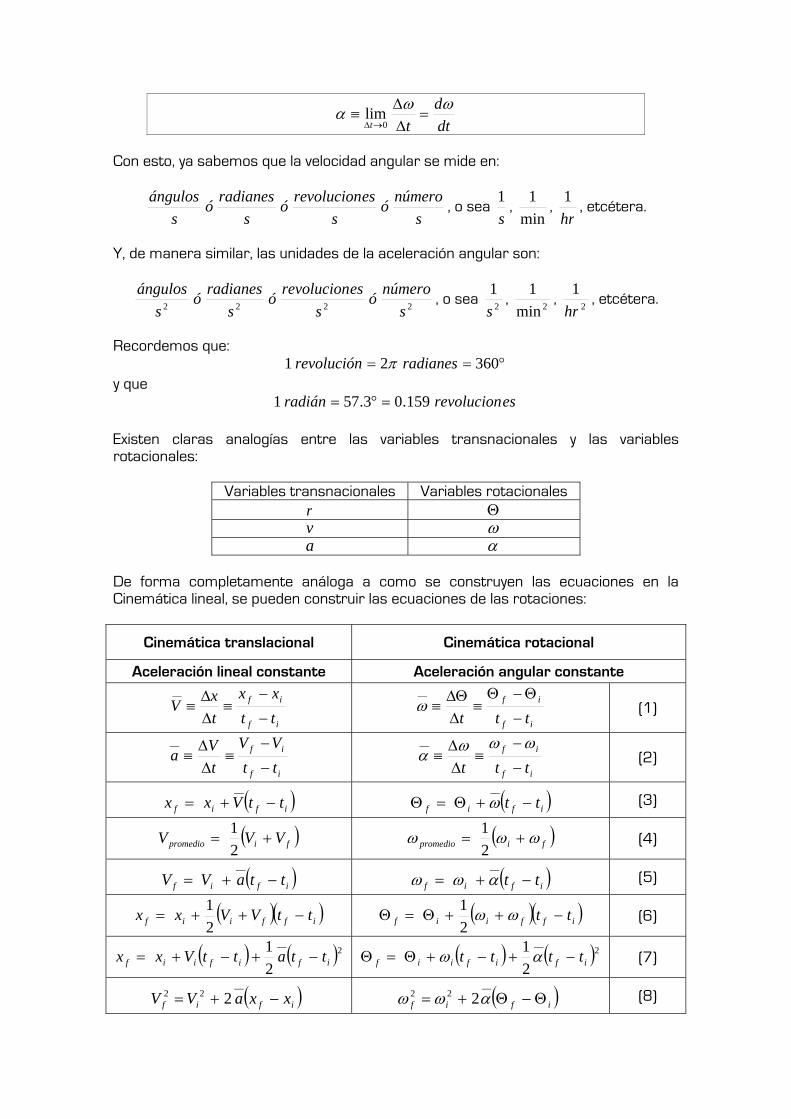
Con esto, ya sabemos que la velocidad angular se mide en:
snúmeroó
sesrevolucionó
sradianesó
sángulos
, o sea s1
, min1
, hr1
, etcétera.
Y, de manera similar, las unidades de la aceleración angular son:
2222 snúmeroó
sesrevolucionó
sradianesó
sángulos
, o sea 2
1s
, 2min1
, 2
1hr
, etcétera.
Recordemos que:
°== 36021 radianesrevolución π y que
esrevolucionradián 159.03.571 =°= Existen claras analogías entre las variables transnacionales y las variables rotacionales:
Variables transnacionales Variables rotacionales r Θ v ω a α
De forma completamente análoga a como se construyen las ecuaciones en la Cinemática lineal, se pueden construir las ecuaciones de las rotaciones:
Cinemática translacional Cinemática rotacional
Aceleración lineal constante Aceleración angular constante
if
if
ttxx
txV
−
−≡
ΔΔ
≡__
if
if
ttt −
Θ−Θ≡
ΔΔΘ
≡__ω (1)
if
if
ttVV
tVa
−
−≡
ΔΔ
≡__
if
if
ttt −
−≡
ΔΔ
≡ωωωα
__ (2)
( )ifif ttVxx −+=__
( )ifif tt −+Θ=Θ__ω (3)
( )fipromedio VVV +=21
( )fipromedio ωωω +=21
(4)
( )ifif ttaVV −+=__
( )ifif tt −+=__αωω (5)
( )( iffiif ttVVxx −++=21 ) ( )( )iffiif tt −++Θ=Θ ωω
21
(6)
( ) ( )2__
21
ififiif ttattVxx −+−+= ( ) ( )2__
21
ififiif tttt −+−+Θ=Θ αω (7)
( )ifif xxaVV −+=__
22 2 ( )ifif Θ−Θ+=__
22 2αωω (8)

Más aún, existen relaciones que vinculan unas y otras variables en la cinemática lineal y rotacional.
Relación plana Relación espacial )(θrsenr →
Esto aplica en las Figuras 2 y 3, por lo que si sustituimos el nuevo valor de la distancia del origen al punto P en las ecuaciones (F):
rv ω=
)(θω rsenv =
Sin entrar en mayores detalles, podemos reconocer en esta última ecuación a la magnitud de un vector muy especial:
rv rrr = ×ω
Es decir que la velocidad en general se escribe como el producto vectorial del vector velocidad angular y del vector de posición.
Por razones propias de la geometría, se requiere de la generalización del producto escalar que se usa mucho en la cinemática lineal. Este es el producto vectorial que se define como para dos vectores A
r y B
rcomo:
( ) ( )zyxzyx bbbaaaBA ,,,, ×=×rr
( ) ( )zyxzyx bkbjbiakajai ˆˆˆˆˆˆ ++×++=
zyx
zyx
bbbaaakji ˆˆˆ
=
Para calcular este producto procedemos con el siguiente algoritmo:
Paso A: Consideramos el primer renglón y la primera columna. El cruce se encuentra en el vector unitario . Esto significa que no
consideramos los valores coloreados, y multiplicamos este
vector por el determinante menor que queda;
i
Paso B: Nos fijamos en el primer renglón y la segunda columna, y los valores coloreados coinciden
en el vector unitario , por lo que multiplicamos este vector
por el determinante menor que queda;
j
Paso C: Procedemos con el primer renglón y la tercera columna. Ahora los valores coloreados coinciden en el
vector , por lo que multiplicamos este vector por el determinante menor que queda;
k
Paso D: Finalmente sumamos los tres resultados, poniendo un signo negativo al segundo.

( ) ( ) ( )xyyxxzzxyzzy
zyx
zyx babakbabajbabaibbbaaakji
BA −+−−−==× ˆˆˆˆˆˆ
rr
BArr
× es un nuevo vector que se forma a partir de Ar
y Br
, y tiene las siguientes propiedades:
1. BArr
× es un vector en el espacio de 3 dimensiones.
2. BArr
× es un vector perpendicular a Ar
y Br
al mismo tiempo.
3. No tiene sentido calcular BArr
× en dos dimensiones, aunque y puedan estar en un mismo plano.
Ar
Br
4. La magnitud de BArr
× es: )(θsenBABArrrr
=× , donde θ es el ángulo entre
los vectores y . Ar
Br
5. ABBArrrr
×−=×
6. BArr
× sigue la regla de la mano derecha. Es decir que Ar
se proyecta sobre
cerrando los dedos de la mano derecha, y el pulgar señala la dirección del vector Br
BArr
× .
Con esto, podemos aplicar un razonamiento análogo al seguido para las ecuaciones de las velocidades, al cálculo de las relaciones de la aceleración: Si derivamos la ecuación (F) con respecto al tiempo:
( )dt
rddtvda
rrrr ×
==ω
Para calcular la derivada de este producto, seguimos la regla de la derivada de un producto de funciones, excepto que tenemos que respetar el orden del producto pues no se cumple la conmutatividad:
dtrdr
dtd r
rrr
×+×= ωω
Aquí reconocemos dos términos:
αω rr=
dtd
y vdtrd rr=

vra rrrrr ×+×=∴ ωα
El primer factor es la aceleración tangencial, mientras que el segundo es la aceleración radial:
raTrrr ×=α
vaRrrr ×=ω
Por lo que:
RT aaa +=r Para generalizar la Dinámica lineal al caso rotacional, también se procede con una sustitución de variables que den cuenta de las características del movimiento. Así pues se define el concepto de “torca”, que en analogía a la fuerza en el movimiento de traslación, nos permite estudiar el movimiento de rotación de los cuerpos ahora sí atendiendo a sus causas. La expresión para la torca es:
Frrrr ×=τ
Aquí, rr representa el vector deposición del punto de aplicación de la fuerza F, la torca resultante τr apuntará en una dirección perpendicular al plano que contiene a los vectores de posición y fuerza. Por otro lado recordando que la magnitud del producto vectorial es:
)(θτ senFrrrr =
Donde θ representa el ángulo formado entre los vectores de posición y fuerza, podremos escribir esta última expresión como:
[ ])(θτ senrF rrr = Generalmente a )(θsenrr se le conoce comúnmente como el “brazo de palanca”.
Ahora, las un cuerpo (un objeto o un sistema), que en cierto instante está en reposo, seguirá en reposo si la fuerza neta que actúan sobre él es nula y además la torca neta de estas fuerzas (respecto a cualquier punto), también es nula. Para que un cuerpo esté en equilibrio es necesario que se cumplan las siguientes dos condiciones:
i) La fuerza neta sobre el objeto debe ser nula. ii) La torca neta sobre el objeto debe ser nulo.
De la misma manera, un objeto (cuerpo rígido) formado por N masas { } ubicadas
en los lugares { } (respecto a un origen O). Sea jm
jrr jFr
la fuerza externa que actúa
sobre cada una de las masas . Se puede ver que: jm
A) Si la fuerza neta sobre un cuerpo es cero entonces el torque neto es independiente del punto respecto del cual se evalúa. En particular, si el

torque es nulo respecto a un punto, también lo será respecto a cualquier otro punto.
B) Si la fuerza neta TotF
rque actúa sobre un cuerpo de masa M no es
nula, entonces el punto del cuerpo que es acelerado de acuerdo a la segunda ley de Newton es el centro de masas. O sea, se tiene que:
cmTot rMF rr=
Debido a la importancia de este resultado lo reiteramos en palabras: La fuerza neta que actúa sobre un objeto acelera al objeto como un todo. El lugar geométrico que cumple con la segunda ley de Newton es el centro de masas. O sea que para analizar el movimiento translacional, toda la masa se puede pensar como si estuviese concentrada en el centro de masas, siendo ése también el lugar en que se aplica la fuerza neta. Y esto es consistente con la idea de partícula. Corolario: Si la fuerza neta que actúa sobre un cuerpo es nula, entonces el centro de masas del cuerpo se traslada con velocidad uniforme (o nula). Observe que no es necesario especificar el punto respecto al cual se está evaluando la torca neta, ya que, de acuerdo a los resultados expuestos anteriormente, si la fuerza neta es nula y la torca es nula respecto a un punto, también lo será con respecto a cualquier otro punto. Como consecuencia de esto, se tiene una generalización del concepto de equilibrio. En la cinemática lineal el equilibrio está determinado principalmente por su función de energía potencial. Así, si pensamos en una montaña rusa, cuyo perfil se muestra en la gráfica:
Se dice que es un punto máximo donde 1x 0=dxdU
, al igual que . Estos puntos son,
sin embargo, inestables pues cualquier pequeña perturbación puede “sacar” al sistema de su posición de manera definitiva.
3x
Los puntos , y son valores mínimos donde también se cumple que 2x 4x 7x 0=dxdU
,
pero son puntos estables, para los cuales una perturbación hace “oscilar” al sistema pero retorna a su posición de energía mínima.
Los puntos y , donde también se cumple que 5x 6x 0=dxdU
, pero son puntos de
equilibrio indiferente pues ante una perturbación permanecen con la misma energía potencial pero ya no en su sitio, sino en su vecindad. Una fuerza conservativa es aquella en la que un potencial es conservativo y ocurre que se cumple la conservación de la energía mecánica. Una fuerza no-conservativa proviene de potenciales no-conservativos que pueden generar dispersión de energía en un sistema. Ejemplos de estas son las fuerzas de fricción o las fuerzas que dependen de la velocidad en fluidos turbulentos. Podemos decir que para un sistema conservativo:
a) Si U es máxima se tiene un punto o un estado de equilibrio inestable. b) Si U es mínima se tiene un estado de equilibrio estable. c) Si U es constante el sistema se encuentra en un estado de equilibrio neutro
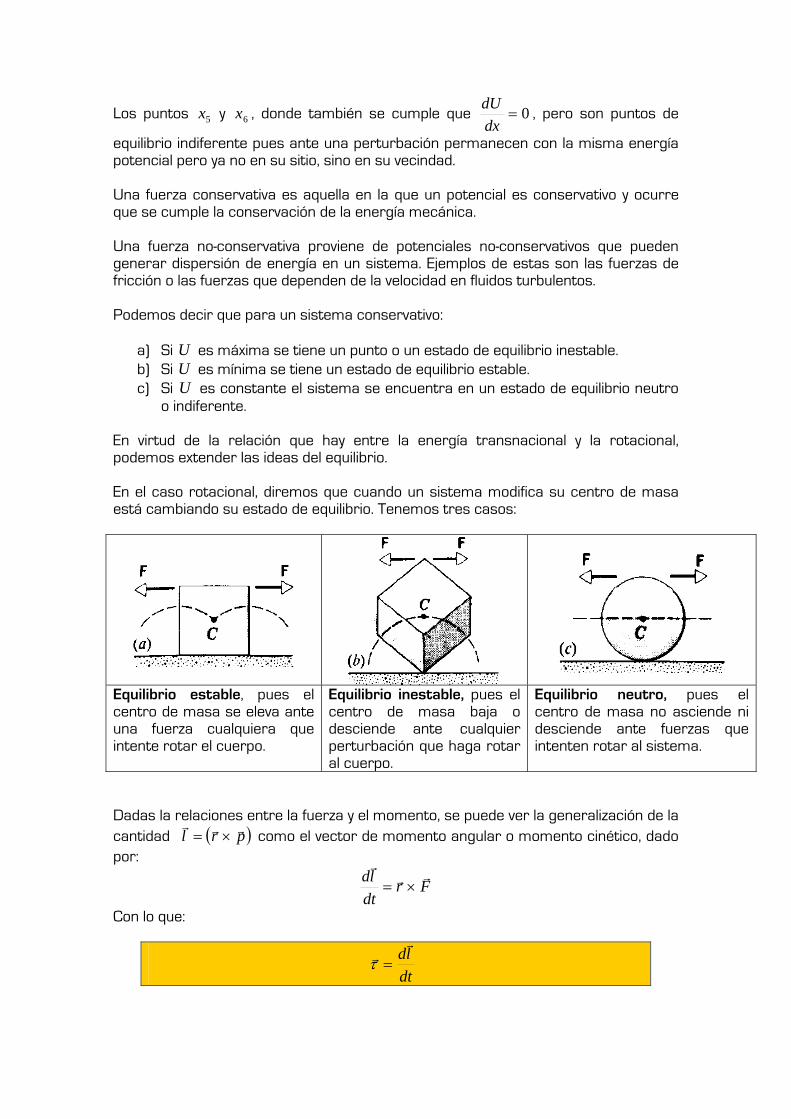
o indiferente. En virtud de la relación que hay entre la energía transnacional y la rotacional, podemos extender las ideas del equilibrio. En el caso rotacional, diremos que cuando un sistema modifica su centro de masa está cambiando su estado de equilibrio. Tenemos tres casos:
Equilibrio estable, pues el centro de masa se eleva ante una fuerza cualquiera que intente rotar el cuerpo.
Equilibrio inestable, pues el centro de masa baja o desciende ante cualquier perturbación que haga rotar al cuerpo.
Equilibrio neutro, pues el centro de masa no asciende ni desciende ante fuerzas que intenten rotar al sistema.
Dadas la relaciones entre la fuerza y el momento, se puede ver la generalización de la cantidad ( prl )rrr
×= como el vector de momento angular o momento cinético, dado por:
Frdtld rrr
×=
Con lo que:
dtldr
r =τ

Esta ecuación es la generalización de la ecuación dtpdFrr
= para el caso de rotaciones.
Igual que en el caso de la torca, el momento angular de una partícula depende del origen que se use para evaluarlo. Si la torca que actúa sobre una partícula, medida respecto a cierto origen es nulo, entonces el momento angular de la partícula, respecto al mismo origen, no variaría en el tiempo, es decir, se conservará, es decir que: Si la suma de todas las torca externas al
sistema es cero, 0=∑ iτr , entonces: 0==
dtldr
rτ
Por lo tanto: 0=dtldr
Esto implica, necesariamente, que el momento angular o momento cinético se
conserva: .ctel =
r (3)
La magnitud del vector de momento angular es:
)(θsenprl rrr=
Donde θ es el ángulo entre los vectores rr y pr . Para un sistema de partículas, para calcular el momento cinético total respecto de un origen común, se puede hacer sumando vectorialmente los diferentes momentos cinéticos individuales de cada partícula:
Lr
∑=
=++++=n
iin lllllL
1321 ,...,
rrrrr
De la misma manera, podemos escribir para la torca externa total, es decir la generalización de la ecuación (2):
dtLd
Ext
rr =τ
En palabras, podemos decir que: El cambio o rapidez de cambio del momento cinético total de un sistema de partículas respecto a un origen común, es igual a la suma de las torcas que actúan sobre ellas. Y nuevamente podemos ver que cuando la torca externa es cero, entonces el momento cinético total del sistema de partículas se conserva:
00 ==dtLdSi Ext
rrτ
.cteL =∴
r

Con esto podemos hablar también de un concepto fundamental en la Física, Para una partícula de masa m y una distancia r al eje de rotación, con rapidez angular ω , como ya se vio anteriormente es rv ω= . La energía cinética es:
222
21
21 ωmrmv =
Esta es la energía de una sola partícula en el sólido, por lo que si consideramos a un conjunto de partículas como las que conforman al sólido, podemos generalizarla de tal manera que la energía cinética total será la suma de las energías individuales:
∑=
=++++=n
iiinnc vmvmvmvmvmE
1
22233
222
211 2
121,....,
21
21
21
Si sustituimos la ecuación (4):
2222
3322
2222
1122
33222
211 2
1,....,21
21
21
21,....,
21
21
21 ωωωω nnnnc rmrmrmrmvmvmvmvmE ++++=++++=
2
1
2
1
22
21
21 ω⎟
⎠
⎞⎜⎝
⎛== ∑∑
==
n
iii
n
iiii rmvrm
Aquí hemos supuesto que la velocidad angular es la misma para todos los puntos al interior del cuerpo, por lo que podemos “sacarla” del signo de suma, al igual que el
factor 21
.
Definimos al factor como la inercia rotacional del sistema, por lo que: ⎟⎠
⎞⎜⎝
⎛≡ ∑
=
n
iii rmI
1
2

2
21 ωIEc =
Podemos decir que la inercia rotacional es la generalización de la masa o de la inercia para el caso de los sistemas en rotación. Sus unidades son las de masa por las del cuadrado de la longitud [ ] [ ][ ]2LMI = . La inercia rotacional depende de la posición o de la geometría respecto al eje de rotación, así que si la distribución de masa respecto a dicho eje cambia, la inercia rotacional cambiará. Así, consideremos los siguientes cuerpos:
(A) (B) (C) (D) Precisamente, considerando la geometría y la distribución de las masas que rotan alrededor del eje z de los objetos de las gráficas, tenemos las siguientes relaciones:
)()()()( DCBA IIII <<<
)()()()( Dc
Cc
Bc
Ac EEEE <<<
Si un consideramos un conjunto de partículas extremadamente cercanas entre sí, eso puede pensarse como un objeto sólido continuo. En ese caso podemos generalizar la expresión de la inercia rotacional como:
∫∑∑∑ →⎟⎠
⎞⎜⎝
⎛Δ→⎟
⎠
⎞⎜⎝
⎛→⎟
⎠
⎞⎜⎝
⎛≡
=∞→
=∞→
=
dmrrmrmrmIn
iiin
n
iiin
n
iii
2
1
2
1
2
1
2 limlim
Donde cada elemento de masa se ha convertido en una imΔ , y el número de partículas tiene al infinito, por lo que la suma se convierte en una integral para sumar sobre todo el continuo. Para cuerpos geométricos simétricos tenemos algunos resultados que se pueden calcular más o menos de forma sencilla, por ejemplo el siguiente:

Tabla de algunos valores de Inercia Rotacional.
Un aro en torno al eje del cilindro.
Cilindro anular (o anillo) en torno al eje del cilindro.
Cilindro sólido en torno al eje del cilindro.
Cilindro sólido en torno al diámetro central.
Una varilla delgada en torno a un eje que pase por el
centro y perpendicular a la longitud L
Una varilla delgada en torno a un eje que pase por un
extremo y perpendicular a la longitud L
Esfera sólida en torno a cualquier diámetro.
Cascarón esférico delgado en torno a cualquier
diámetro.
Aro en torno a cualquier diámetro.

Una placa en torno al eje perpendicular al eje que
pasa por su centro. Cono en torno al eje axial.
Una placa en torno al eje perpendicular que pasa por un costado a la mitad de su
centro de masa. TEOREMA DE LOS EJES PARALELOS. Existe una relación simple y muy útil entre la inercia rotacional respecto a un eje cualquiera y la inercia rotacional respecto al eje que pasa por el centro de masa. El teorema de los ejes paralelos se enuncia de la siguiente manera:
La inercia rotacional de cualquier cuerpo en torno a un eje arbitrario es igual a la inercia rotacional alrededor de un eje paralelo que pase por el centro de masa más la masa total por la distancia entre los dos ejes elevada al cuadrado
2MhII cm +=
Donde I es la inercia de rotación alrededor del eje arbitrario, es la inercia rotacional alrededor del eje que pasa por el centro de masa,
cmIM es la masa
total del cuerpo y es la distancia entre ambos ejes. h

Una aplicación interesante y sumamente útil es la relación entre movimientos de translación y rotación combinados. Ejemplo A. Un cilindro de masa M y radio R rueda hacia abajo sin deslizamiento por un plano inclinado de longitud L y altura . Hallar la velocidad de su centro de masa cuando el cilindro llega a la parte baja del plano.
h
Un objeto que rota puede pensarse que lo hace con respecto a un eje que pasa por el punto de contacto con la superficie horizontal. Ese es un eje instantáneo, y en este caso se trata del punto B.
La energía cinética de rotación será:
2
21 ωBc IE =
Por el teorema de los ejes paralelos, podemos escribir:
MhII CMB2+=
Donde es la distancia del punto B al centro de masa, por lo que: h
( ) 22
21 ωMhIE CMc +=
222
21
21 ωω MhIE CMc +=
En este caso , y usando la relación entre la velocidad angular y la velocidad lineal:
Rh =
MRIE CMc222
21
21 ωω +=

( ) MRIE CMc22
21
21 ωω +=
MvIE CMCMc22
21
21
+= ω
Esta relación expresa muy claramente que la energía cinética de un objeto en rotación con respecto a un eje instantáneo de rotación, que es virtual, se puede separar en dos parte: una energía de rotación con respecto al centro de masa, más una energía de translación del centro de masa. Así que, para resolver este problema usamos la conservación de la energía. El cilindro está inicialmente en reposo. En la parte superior, la energía potencial es
, y en la parte más baja, ésta se transforma totalmente en energía cinética de rotación más la energía cinética de translación.
MghU =Δ
22
21
21 ωCMCM IMvMgh += (C)
Usando las relaciones para la Inercia rotacional del cilindro 2
21 MRICM = y la de la
velocidad angular: 2
22
21
21
21
⎟⎠⎞
⎜⎝⎛⎟⎠⎞
⎜⎝⎛+=
Rv
MRMvMgh CMCM
222
43
41
21
CMCMCM MvMvMvMgh =+=
Por lo tanto:
ghvCM 34
= (D)
Observemos que si el objeto no rotara al bajar, es decir que bajara deslizándose entonces no aparece el segundo sumando del lado derecho de la ecuación (C):
Así que la velocidad adquiere el valor:
ghvCM 2= (E)
Si comparamos los dos valores, de las velocidades expresados en las ecuaciones (D) y (E), podemos ver que por el hecho de rotar, parte de la energía de translación se ocupa en producir el movimiento de rotación, por eso el resultado de la ecuación (D) es menor que el de la ecuación (C).

Ejemplo B. Una esfera, un cilindro y un aro comienzan desde el reposo y ruedan abajo por el mismo plano inclinado, como se muestra en la figura. ¿Cuál de todos llega primero al fondo?
Vamos a resolver este problema comparando las aceleraciones de los centros de masa de los tres objetos. El que tenga una aceleración mayor será el que llega primero al fondo. A partir de los cálculos anteriores, tenemos la siguiente ecuación general para el movimiento a lo largo del plano:
CMMafsenMg =−θ Donde la fuerza de fricción es:
2Ra
IR
If CMCMCM ==
α
Que es la fuerza que produce la torca que produce la rotación del objeto. Ahora, combinando estas ecuaciones tenemos:
CMCM
CM MaRa
IsenMg =− 2θ
Podemos despejar la aceleración que se aplica para los tres objetos:
CMCM
CM MaRa
IsenMg += 2θ
CMCM aMRI
senMg ⎟⎠⎞
⎜⎝⎛ += 2θ
⎟⎠⎞
⎜⎝⎛ +
=M
RI
senMgaCM
CM
2
θ
⎟⎠⎞
⎜⎝⎛ +
=∴12MR
Isenga
CMCM
θ
(F)

Ahora la aplicamos para cada objeto:
Esfera: 52
2 =MRICM θθθ sengsengsengaCM 714.0
75
152
==⎟⎠⎞
⎜⎝⎛ +
= 2
52 MRICM =
21
2 =MRICM θθθ sengsengsengaCM 667.0
32
121
==⎟⎠⎞
⎜⎝⎛ +
=
2
21 MRICM = Cilindro:
Aro: 12 =MRICM ( ) θθθ sengsengsengaCM 5.0
21
11==
+= 2MRICM =
Claramente la esfera tiene una aceleración mayor y es la primera que llega al fondo. Luego le sigue el cilindro y finalmente el aro. La razón se puede explicar de la siguiente manera. La esfera tiene más compacta su constitución y puede aceptar la rotación con el menor costo de energía cinética, puesto que su inercia rotacional es la más pequeña de las tres. Una condición para la rotación es que: Cuando un cuerpo rueda sin deslizarse se establece una ligadura, hablando en lenguaje físico, entre el ángulo que rota el cuerpo y la distancia que avanza. Para un cuerpo redondo, que es el caso común, θRS = , siendo R el radio de la figura. Esto es muy lógico porque si el camino que va recorriendo el móvil fuera mayor que la longitud de cuerpo que toca el suelo necesariamente debería haber algún tipo de deslizamiento. Teniendo esta igualdad es muy fácil establecer que
ωRvCM =
αRaCM =
Tenemos un diagrama sobre los conceptos que nos interesa estudiar, las restricciones hasta ahora, y las variables y sus relaciones conceptuales.
Cinemática 1. Espacio y tiempo absolutos (como consecuencia del uso del espacio
euclideano). 2. Restricciones a movimientos con velocidad constante o aceleración
constante. 3. Masas puntuales.