on the role of msbn to cooperative multiagent systems by y. xiang and v. lesser presented by:...
Post on 18-Dec-2015
214 views
TRANSCRIPT
On the Role of MSBN to Cooperative Multiagent SystemsBy Y. Xiang and V. Lesser
Presented by:
Jingshan Huang and Sharon Xi

Motivation
A common task in multiagent systemsAgents need to estimate the state of an uncertain domain so that they can act accordingly
Constraints Each agent only has partial knowledge about the domain Only local observations are available Limited amount of communication
Solution ?

Motivation --- cont.
MSBNs (Multiply Sectioned Bayesian Networks) provide a solution
An effective and exact framework But a set of constraints exist
Structure of the presentation
Introduction of the background knowledge Detail information about the constraints A small set of high level choices How those choices logically imply all the
constraints
Background knowledge
Definition of MSBNA MSBN M is a triplet (V, G, P): V is the union domain from all agents G is the structure, i.e., hypertree MSDAG
Hypertree structure D-sepset concept
P is the JPD (Joint Probability Distribution) over GP( x | π(x)) is assigned to exactly one occurrence of x, and uniform potential to all other occurrences
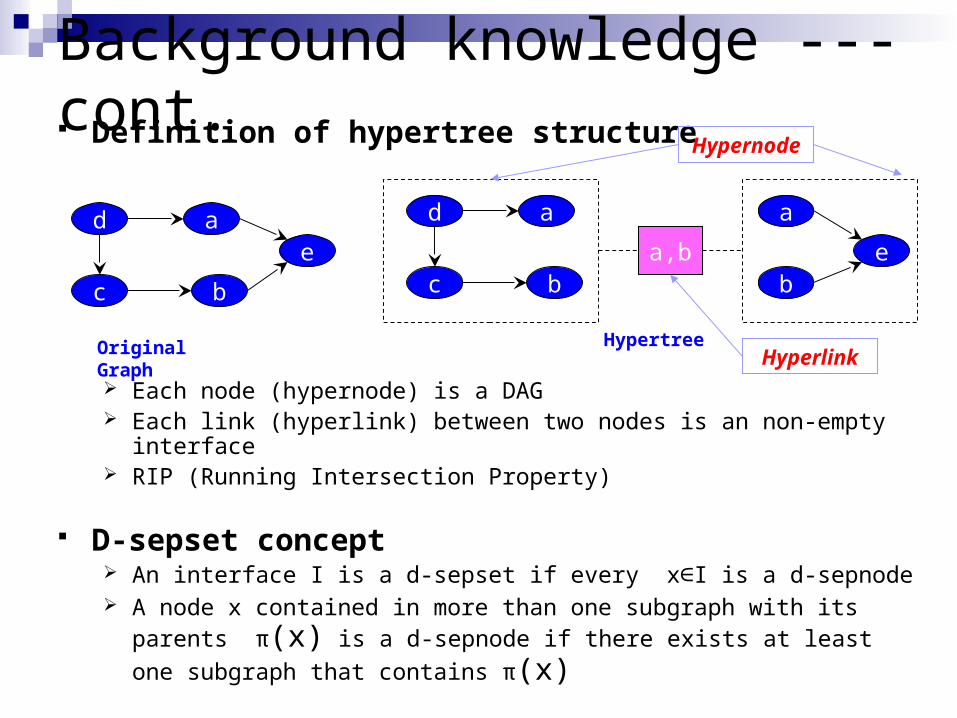
Background knowledge --- cont. Definition of hypertree structure
Each node (hypernode) is a DAG Each link (hyperlink) between two nodes is an non-empty interface RIP (Running Intersection Property)
D-sepset concept An interface I is a d-sepset if every x I is a d-sepnode∈ A node x contained in more than one subgraph with its parents π(x) is a
d-sepnode if there exists at least one subgraph that contains π(x)
d
bc
ae
d
bc
a
b
a
ea,b
Original Graph Hypertree
Hypernode
Hyperlink

Background knowledge --- cont.Some useful definitions
Communication GraphIn a graph with n hypernodes, associate each node with an agent Ai and label it by Vi
Connect each pair of nodes Vi and Vj by a link labeled byif
Junction GraphA triplet (V, Ω, E)V is a non-empty set (the generating set)Ω is a subset of 2V s.t. , each element Q is called a clusterE is defined as
QV
QQ,QQ,Q,Q|Q,Q 21212121
ji VVI I
Background knowledge --- cont.
Cluster GraphLet (V, Ω ,E) be a junction graph and , then (V, Ω ,E’) is a cluster graph over V
Degenerate Loop and Nondegenerate Loop
Let ρ be a loop in a cluster graph H. If there exists a separator S on ρ that is contained in every other separator on ρ, then ρ is a degenerate loop. Otherwise, ρ is a nondegenerate loop
E'E

Background knowledge --- cont.d,e
b,c,d
d,f
d,g
d
d
dd
d
d
(a) Strong Degenerate Loop
d,e,i
b,c,d,i
d,f,h
d,g,h
d,i
d
d,h
d
(b) Weak Degenerate Loop
a,b
b,c,d
a,e
c,e
b
a
e
c
(c) Strong Nondegenerate Loop
a,b,f
b,c,d,f
a,e,f
c,e,f
b,f
a,f
e,f
c,f
(d) Week Nondegenerate Loop

Structure of the presentation
Introduction of the background knowledge Detail information about the constraints A small set of high level choices How those choices logically imply all the
constraints
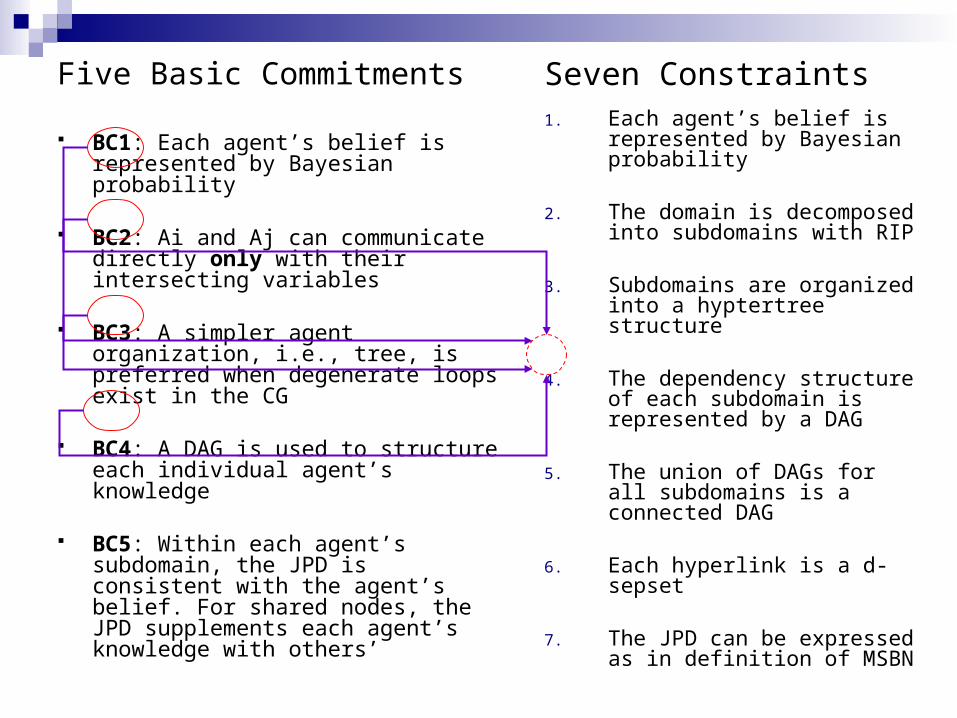
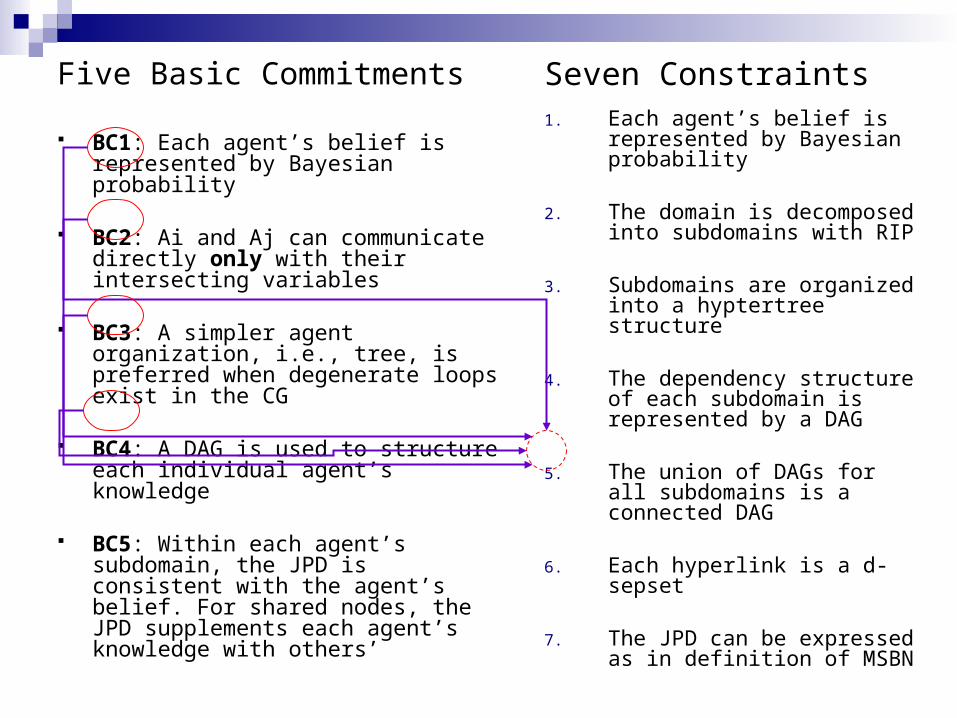
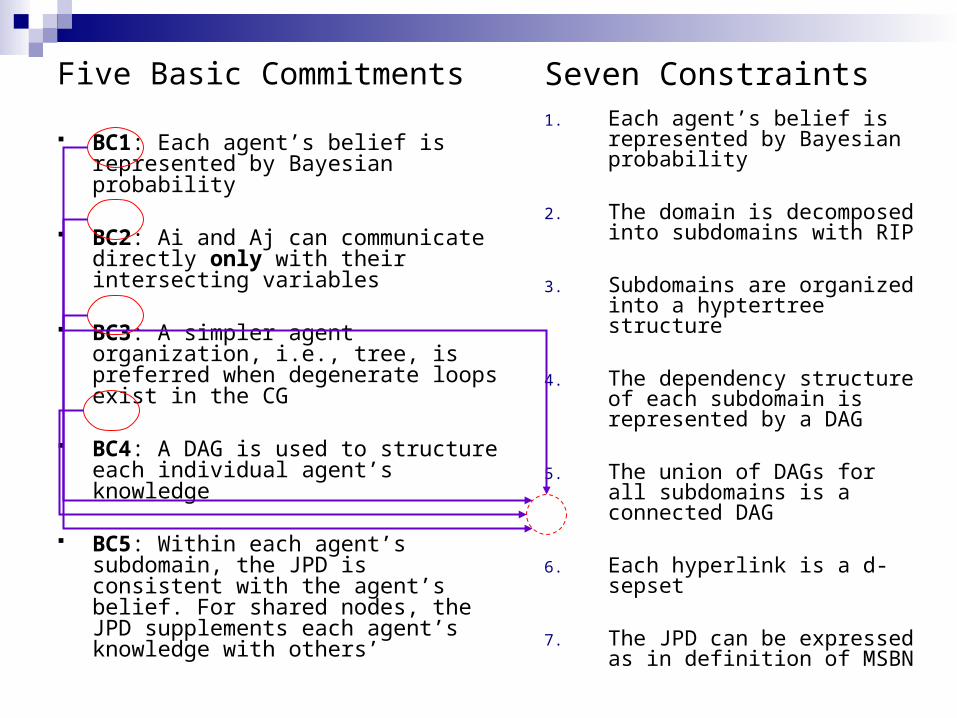
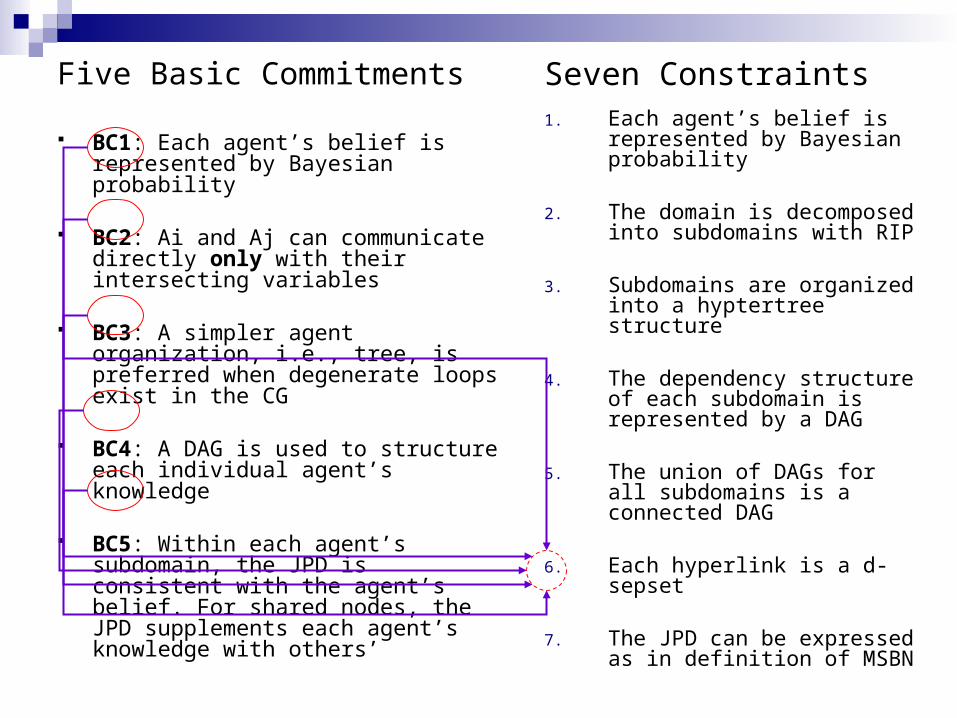
Seven Constraints1. Each agent’s belief is represented by Bayesian probability
2. The domain is decomposed into subdomains with RIP
3. Subdomains are organized into a hyptertree structure
4. The dependency structure of each subdomain is represented by a DAG
5. The union of DAGs for all subdomains is a connected DAG
6. Each hyperlink is a d-sepset
7. The JPD can be expressed as in definition of MSBN

Structure of the presentation
Introduction of the background knowledge Detail information about the constraints A small set of high level choices How those choices logically imply all the
constraints

High Level Choices (Basic Commitments)
BC1: Each agent’s belief is represented by Bayesian probability
BC2: Ai and Aj can communicate directly only with their intersecting variables
BC3: A simpler agent organization, i.e., tree, is preferred when degenerate loops exist in the CG
BC4: A DAG is used to structure each individual agent’s knowledge
BC5: Within each agent’s subdomain, the JPD is consistent with the agent’s belief. For shared nodes, the JPD supplements each agent’s knowledge with others’
Structure of the presentation
Introduction of the background knowledge Detail information about the constraints A small set of high level choices How those choices logically imply all the
constraints
Seven Constraints1. Each agent’s belief is
represented by Bayesian probability
2. The domain is decomposed into subdomains with RIP
3. Subdomains are organized into a hyptertree structure
4. The dependency structure of each subdomain is represented by a DAG
5. The union of DAGs for all subdomains is a connected DAG
6. Each hyperlink is a d-sepset
7. The JPD can be expressed as in definition of MSBN
Five Basic Commitments
BC1: Each agent’s belief is represented by Bayesian probability
BC2: Ai and Aj can communicate directly only with their intersecting variables
BC3: A simpler agent organization, i.e., tree, is preferred when degenerate loops exist in the CG
BC4: A DAG is used to structure each individual agent’s knowledge
BC5: Within each agent’s subdomain, the JPD is consistent with the agent’s belief. For shared nodes, the JPD supplements each agent’s knowledge with others’
Proof of the logical implication

Seven Constraints1. Each agent’s belief is
represented by Bayesian probability
2. The domain is decomposed into subdomains with RIP
3. Subdomains are organized into a hyptertree structure
4. The dependency structure of each subdomain is represented by a DAG
5. The union of DAGs for all subdomains is a connected DAG
6. Each hyperlink is a d-sepset
7. The JPD can be expressed as in definition of MSBN
Five Basic Commitments
BC1: Each agent’s belief is represented by Bayesian probability
BC2: Ai and Aj can communicate directly only with their intersecting variables
BC3: A simpler agent organization, i.e., tree, is preferred when degenerate loops exist in the CG
BC4: A DAG is used to structure each individual agent’s knowledge
BC5: Within each agent’s subdomain, the JPD is consistent with the agent’s belief. For shared nodes, the JPD supplements each agent’s knowledge with others’

Seven Constraints1. Each agent’s belief is
represented by Bayesian probability
2. The domain is decomposed into subdomains with RIP
3. Subdomains are organized into a hyptertree structure
4. The dependency structure of each subdomain is represented by a DAG
5. The union of DAGs for all subdomains is a connected DAG
6. Each hyperlink is a d-sepset
7. The JPD can be expressed as in definition of MSBN
Five Basic Commitments
BC1: Each agent’s belief is represented by Bayesian probability
BC2: Ai and Aj can communicate directly only with their intersecting variables
BC3: A simpler agent organization, i.e., tree, is preferred when degenerate loops exist in the CG
BC4: A DAG is used to structure each individual agent’s knowledge
BC5: Within each agent’s subdomain, the JPD is consistent with the agent’s belief. For shared nodes, the JPD supplements each agent’s knowledge with others’
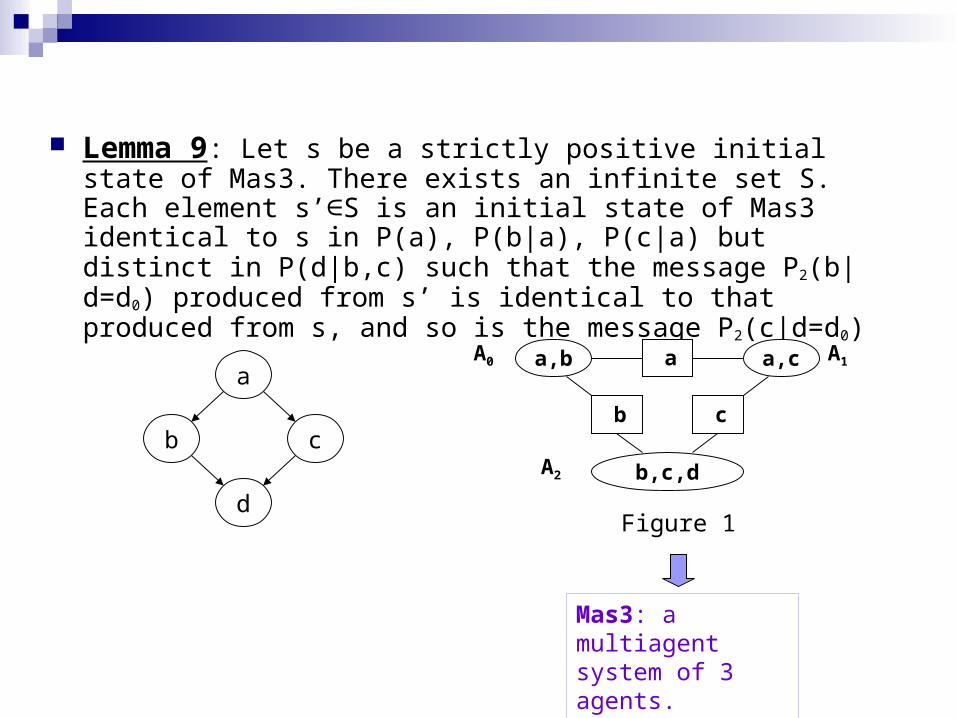
Lemma 9: Let s be a strictly positive initial state of Mas3. There exists an infinite set S. Each element s’ S is an initial ∈state of Mas3 identical to s in P(a), P(b|a), P(c|a) but distinct in P(d|b,c) such that the message P2(b|d=d0) produced from s’ is identical to that produced from s, and so is the message P2(c|d=d0)
a,b a,c
b,c,d
a
b c
A0
A2
A1
Figure 1
Mas3: a multiagent system of 3 agents.
a
b c
d
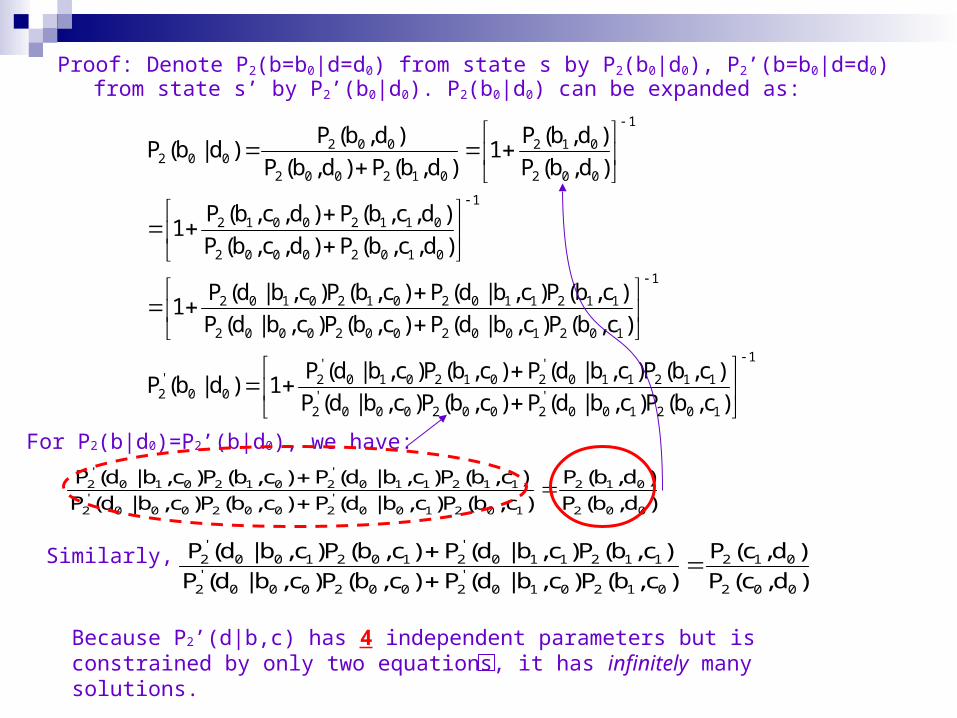
Proof: Denote P2(b=b0|d=d0) from state s by P2(b0|d0), P2’(b=b0|d=d0) from state s’ by P2’(b0|d0). P2(b0|d0) can be expanded as:
1
102100'2002000
'2
112110'2012010
'2
00'2
1
10210020020002
11211020120102
1
01020002
01120012
1
002
012
012002
002002
)c,b(P)c,b|d(P)c,b(P)c,b|d(P
)c,b(P)c,b|d(P)c,b(P)c,b|d(P1)d|b(P
)c,b(P)c,b|d(P)c,b(P)c,b|d(P
)c,b(P)c,b|d(P)c,b(P)c,b|d(P1
)d,c,b(P)d,c,b(P
)d,c,b(P)d,c,b(P1
)d,b(P
)d,b(P1
)d,b(P)d,b(P
)d,b(P)d|b(P
)d,b(P
)d,b(P
)c,b(P)c,b|d(P)c,b(P)c,b|d(P
)c,b(P)c,b|d(P)c,b(P)c,b|d(P
002
012
102100'2002000
'2
112110'2012010
'2
For P2(b|d0)=P2’(b|d0), we have:
Similarly, )d,c(P
)d,c(P
)c,b(P)c,b|d(P)c,b(P)c,b|d(P
)c,b(P)c,b|d(P)c,b(P)c,b|d(P
002
012
012010'2002000
'2
112110'2102100
'2
Because P2’(d|b,c) has 4 independent parameters but is constrained by only two equations, it has infinitely many solutions.
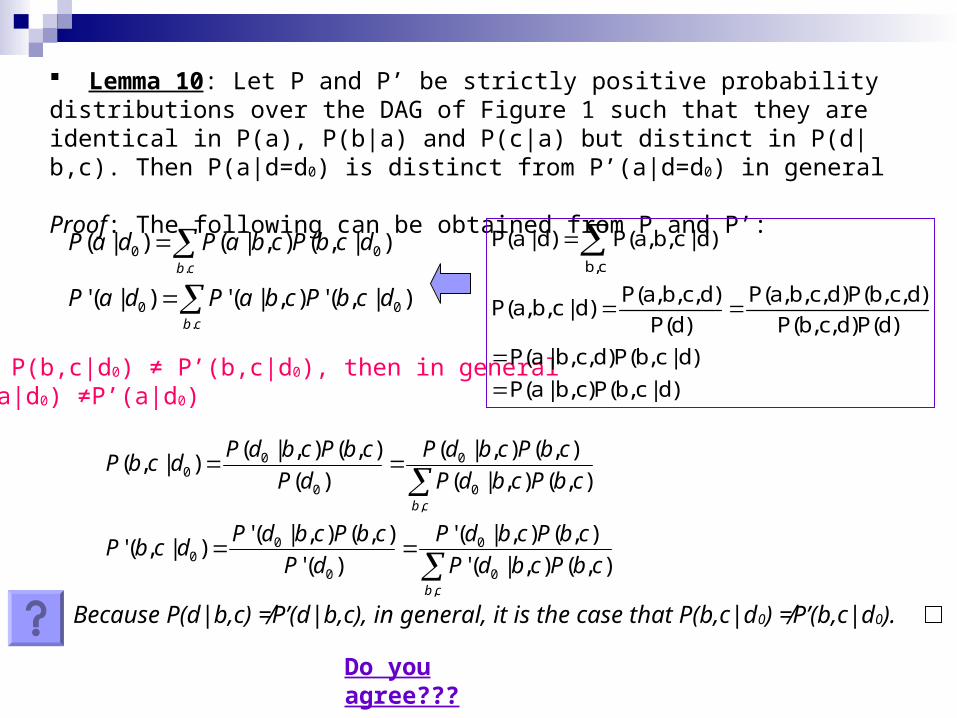
Lemma 10: Let P and P’ be strictly positive probability distributions over the DAG of Figure 1 such that they are identical in P(a), P(b|a) and P(c|a) but distinct in P(d|b,c). Then P(a|d=d0) is distinct from P’(a|d=d0) in general
Proof: The following can be obtained from P and P’:
cb
cb
dcbPcbaPdaP
dcbPcbaPdaP
.00
.00
)|,('),|(')|('
)|,(),|()|(
cb
cb
cbPcbdP
cbPcbdP
dP
cbPcbdPdcbP
cbPcbdP
cbPcbdP
dP
cbPcbdPdcbP
,0
0
0
00
,0
0
0
00
),(),|('
),(),|('
)('
),(),|(')|,('
),(),|(
),(),|(
)(
),(),|()|,(
If P(b,c|d0) ≠ P’(b,c|d0), then in general P(a|d0) ≠P’(a|d0)
Because P(d|b,c) ≠P’(d|b,c), in general, it is the case that P(b,c|d0) ≠P’(b,c|d0).
Do you agree???
)d|c,b(P)c,b|a(P
)d|c,b(P)d,c,b|a(P
)d(P)d,c,b(P
)d,c,b(P)d,c,b,a(P
)d(P
)d,c,b,a(P)d|c,b,a(P
)d|c,b,a(P)d|a(Pc,b
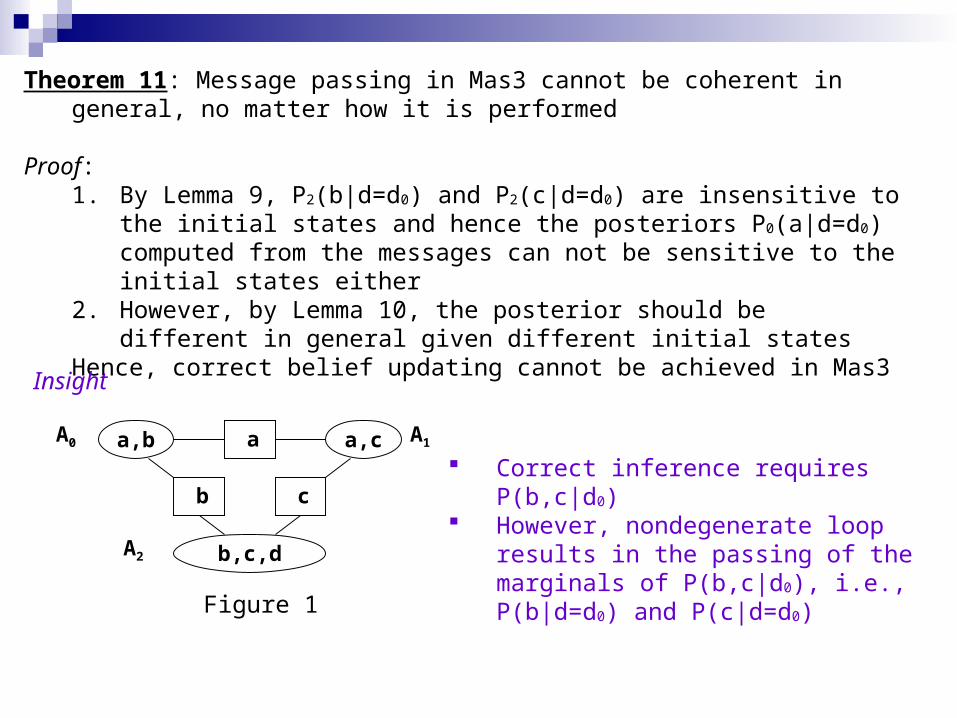
Theorem 11: Message passing in Mas3 cannot be coherent in general, no matter how it is performed
Proof: 1. By Lemma 9, P2(b|d=d0) and P2(c|d=d0) are insensitive to the initial states
and hence the posteriors P0(a|d=d0) computed from the messages can not be sensitive to the initial states either
2. However, by Lemma 10, the posterior should be different in general given different initial states
Hence, correct belief updating cannot be achieved in Mas3
a,b a,c
b,c,d
a
b c
A0
A2
A1
Figure 1
Correct inference requires P(b,c|d0) However, nondegenerate loop results
in the passing of the marginals of P(b,c|d0), i.e., P(b|d=d0) and P(c|d=d0)
Insight
We can generalize this analysis to an arbitrary, strong nondegenerate loop of length 3
Further generalize this analysis to an arbitrary, strong nondegenerate loop of length K ≥ 3
Conclusion
Corollary 12: Message passing in a cluster graph with nondegenerate loops cannot be coherent in general, no matter how it is performed
Another conclusion without proof: A cluster graph with only degenerate loops can
always be treated by first breaking the loops at appropriate separators. The resultant is a cluster tree
Therefore, we have: Proposition 13: Let a multiagent system be one
that observes BC 1 through BC 3. Then a tree organization of agents should be used
Seven Constraints1. Each agent’s belief is
represented by Bayesian probability
2. The domain is decomposed into subdomains with RIP
3. Subdomains are organized into a hyptertree structure
4. The dependency structure of each subdomain is represented by a DAG
5. The union of DAGs for all subdomains is a connected DAG
6. Each hyperlink is a d-sepset
7. The JPD can be expressed as in definition of MSBN
Five Basic Commitments
BC1: Each agent’s belief is represented by Bayesian probability
BC2: Ai and Aj can communicate directly only with their intersecting variables
BC3: A simpler agent organization, i.e., tree, is preferred when degenerate loops exist in the CG
BC4: A DAG is used to structure each individual agent’s knowledge
BC5: Within each agent’s subdomain, the JPD is consistent with the agent’s belief. For shared nodes, the JPD supplements each agent’s knowledge with others’
Seven Constraints1. Each agent’s belief is
represented by Bayesian probability
2. The domain is decomposed into subdomains with RIP
3. Subdomains are organized into a hyptertree structure
4. The dependency structure of each subdomain is represented by a DAG
5. The union of DAGs for all subdomains is a connected DAG
6. Each hyperlink is a d-sepset
7. The JPD can be expressed as in definition of MSBN
Five Basic Commitments
BC1: Each agent’s belief is represented by Bayesian probability
BC2: Ai and Aj can communicate directly only with their intersecting variables
BC3: A simpler agent organization, i.e., tree, is preferred when degenerate loops exist in the CG
BC4: A DAG is used to structure each individual agent’s knowledge
BC5: Within each agent’s subdomain, the JPD is consistent with the agent’s belief. For shared nodes, the JPD supplements each agent’s knowledge with others’

Proposition 17: Let a multiagent system over V be constructed following BC 1 through BC 4. Then each subdomain Vi is structured as a DAG over Vi and the union of these DAGs is a connected DAG over V
Proof:1. The connectedness is implied by Proposition 62. If the union of subdomain DAGs is not a DAG, then it
has a directed loop. This contradicts the acyclic interpretation of dependence in individual DAG models
Seven Constraints1. Each agent’s belief is
represented by Bayesian probability
2. The domain is decomposed into subdomains with RIP
3. Subdomains are organized into a hyptertree structure
4. The dependency structure of each subdomain is represented by a DAG
5. The union of DAGs for all subdomains is a connected DAG
6. Each hyperlink is a d-sepset
7. The JPD can be expressed as in definition of MSBN
Five Basic Commitments
BC1: Each agent’s belief is represented by Bayesian probability
BC2: Ai and Aj can communicate directly only with their intersecting variables
BC3: A simpler agent organization, i.e., tree, is preferred when degenerate loops exist in the CG
BC4: A DAG is used to structure each individual agent’s knowledge
BC5: Within each agent’s subdomain, the JPD is consistent with the agent’s belief. For shared nodes, the JPD supplements each agent’s knowledge with others’

Theorem 18: Let Ψ be a hypertree over a directed graph G=(V, E). For each hyperlink I which splits Ψ into 2 subtrees over U V and W V respectively, U \ I and ⊂ ⊂W \ I are d-separated by I iff each hyperlink in Ψ is a d-sepset
Proposition 14: Let a multiagent system be one that observes BC 1 through BC 3. Then a junction tree organization of agents must be used
Proposition 19: Let a multiagent system be constructed following BC 1 through BC 4. Then it must be structured as a hypertree MSDAG
Proof of Proposition 19:
From BC 1 through BC 4, it follows that each subdomain should be structured as a DAG and the entire domain should be structured as a connected DAG (Proposition 17). The DAGs should be organized into a hypertree (Proposition 14). The interface between adjacent DAGs on the hypertree should be a d-sepset (Theorem 18). Hence, the multiagent system should be structured as a hypertree MSDAG (Definition 3)
Seven Constraints1. Each agent’s belief is
represented by Bayesian probability
2. The domain is decomposed into subdomains with RIP
3. Subdomains are organized into a hyptertree structure
4. The dependency structure of each subdomain is represented by a DAG
5. The union of DAGs for all subdomains is a connected DAG
6. Each hyperlink is a d-sepset
7. The JPD can be expressed as in definition of MSBN
Five Basic Commitments
BC1: Each agent’s belief is represented by Bayesian probability
BC2: Ai and Aj can communicate directly only with their intersecting variables
BC3: A simpler agent organization, i.e., tree, is preferred when degenerate loops exist in the CG
BC4: A DAG is used to structure each individual agent’s knowledge
BC5: Within each agent’s subdomain, the JPD is consistent with the agent’s belief. For shared nodes, the JPD supplements each agent’s knowledge with others’
Conclusion
Theorem 22: Let a multiagent system be constructed following BC 1 through BC 5. Then it must be represented as a MSBN or some equivalent