on the robust nonlinear curve fitting - ism.ac.jpfukumizu/coopmathws2014/akaho_coopmathws... ·...
TRANSCRIPT

. . . . . .
.
......On the robust nonlinear curve fitting
Shotaro Akaho
The National Institute of Advanced Industrial Science and Technology (AIST)
2014/03/14
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 1 / 47

. . . . . .
Motivation and Results
A large dimensional problem in a small dimensional space
Input vs feature space metric: kernel method is a strong tool todeal with nonlinear problems by linear methods, but metric structureof input space is broken⇒ General framework to incorporate input space metric
Robustness: Lp regularization (p ≤ 1) is popular for the sparseness,but we focus more on Lp cost function for robustness⇒ Sparse property of the optimal solution
PCA vs MCA: kernel PCA does not always give satisfiable results⇒ Comparative results (discussion) of kernel PCA and MCA
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 2 / 47

. . . . . .
Acknowledgement
A part of the work in this presentation is a joint work with Jun Fujiki(Fukuoka univ.) Hideitsu Hino (Tsukuba univ.) and Noboru Murata(Waseda univ.), as well as informal discussion with Kenji Fukumizu (ISM)
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 3 / 47

. . . . . .
Table of contents
...1 Fitting as a dimension reduction
...2 Feature map and minimization of the input space distance
...3 Maximization of the input space margin (Robust classification)
...4 Robust fitting by Lp cost minimization (0 < p ≤ 1)
...5 Fitting problem in very high dimensional feature space
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 4 / 47
. . . . . .
Table of contents
...1 Fitting as a dimension reduction
...2 Feature map and minimization of the input space distance
...3 Maximization of the input space margin (Robust classification)
...4 Robust fitting by Lp cost minimization (0 < p ≤ 1)
...5 Fitting problem in very high dimensional feature space
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 5 / 47
. . . . . .
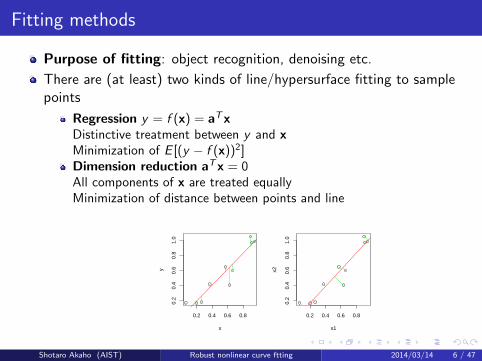
Fitting methods
Purpose of fitting: object recognition, denoising etc.
There are (at least) two kinds of line/hypersurface fitting to samplepoints
Regression y = f (x) = aTxDistinctive treatment between y and xMinimization of E [(y − f (x))2]Dimension reduction aTx = 0All components of x are treated equallyMinimization of distance between points and line
0.2 0.4 0.6 0.8
0.2
0.4
0.6
0.8
1.0
x
y
0.2 0.4 0.6 0.8
0.2
0.4
0.6
0.8
1.0
x1
x2
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 6 / 47

. . . . . .
Fitting by dimension reduction
Minimization of distance between points and subspace (MCA)
Equivalently, find the subspace that preserves variance of data pointsas much as possible (PCA)
Equivalence of Principal Component Analysis (PCA) and MinorComponent Analysis (MCA)
Solution is obtained by solving eigenvalue problem
(XTX )a = λa
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 7 / 47

. . . . . .
Extension to Riemannian space
In many applications, we need to consider non-Euclidean space
Hypersphere (directional data, geology, economics; Fujiki+2007)
Grassmann-Stiefel manifold (subspace data, independent componentanalysis; Nishimori+2005)
Statistical manifold (statistics, optimization, control; Akaho2004)
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 8 / 47

. . . . . .
Extension to Riemannian space
Riemannian space with metric G (x)
Extension to distance to the length of geodesic (hard to evaluate)
Local approximation by the norm on the tangent space at xi∥x− xi∥2Gi
= (x− xi )TGi (x− xi ), Gi = G (xi )
In spite of this approximation, dimension reduction problem cannot besolved by a simple eigenvalue problem.
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 9 / 47

. . . . . .
Table of contents
...1 Fitting as a dimension reduction
...2 Feature map and minimization of the input space distance
...3 Maximization of the input space margin (Robust classification)
...4 Robust fitting by Lp cost minimization (0 < p ≤ 1)
...5 Fitting problem in very high dimensional feature space
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 10 / 47

. . . . . .
Quadratic curve fitting
Quadratic curve fitting
a0 + a1x1 + a2x2 + a3x21 + a4x1x2 + a5x
22 = 0
Feature map reduces the nonlinear problem to linear problemx 7→ ϕ(x) = (1, x1, x2, x1
2, x1x2, x22)
Linear fitting on 6 dimensional feature space
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 11 / 47

. . . . . .
Input space versus feature space
Linear method on feature space minimizes the distance in featurespace.
However, the distance is not equal to the distance between points andthe curve in the input space
There are not many researches focusing on input space (Scholkopf1999)
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 12 / 47

. . . . . .
Locally linear approximation of function
Projection from a point to a curve is difficult in general(local minimum/maximum, saddle)
Linear approximation of f (x∗i ) = 0 around xi(Akaho1993)
0 = f (x∗i ) ≃ f (xi ) +∇f (xi )T (x∗i − xi )
The closest point x∗i to xi w.r.t. metric Gi , satisfying the constraintabove is given by
∥x∗i − xi∥2Gi=
f (xi )2
∥∇f (xi )∥2G−1i
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 13 / 47

. . . . . .
Locally linear approximation of function
Applying to f (x) = aTϕ(x) leads to the sum of input space distance
∑i
∥x∗i − xi∥2Gi=
∑i
aTϕiϕTi a
aT∇ϕiG−1i ∇ϕT
i a, ϕi = ϕ(xi )
Sum of ratio of quadratic forms
Successive iteration method
at+1 = argmin∥a∥=1
aT
[∑i
1
wiϕiϕ
Ti
]a, wi = aTt ∇ϕiG
−1i ∇ϕT
i at ,
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 14 / 47

. . . . . .
Example
u ∼ u[−2, 2], x1 = u + ϵ1, x2 = u2 + ϵ2
-5 0 5
0
5
10
-5 0 5
0
5
10
Feature space Input space
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 15 / 47

. . . . . .
Table of contents
...1 Fitting as a dimension reduction
...2 Feature map and minimization of the input space distance
...3 Maximization of the input space margin (Robust classification)
...4 Robust fitting by Lp cost minimization (0 < p ≤ 1)
...5 Fitting problem in very high dimensional feature space
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 16 / 47

. . . . . .
Toward higher dimensions
Higher dimensional case (e.g. Reproducing Kernel Hilbert Space)
First, we consider support vector machine (not curve fitting, but findsoptimal separating hypersurface)
Fitting problem is discussed later
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 17 / 47

. . . . . .
Support vector machine
SVM finds an optimal hyperplane that maximizes margin in thefeature space
Maximize the margin in the input space by the approximation ofdistance in the input space
Approach: the same formulation as conventional SVM exceptintroducing a linear approximation of distance (+ additional linearexpansions; Akaho2004)
w Φ(x)=1
w Φ(x)=-1
w Φ(x)=0
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 18 / 47

. . . . . .
Approximation of distance
Approximate the distance not around xi but abetter estimate xi
∥di∥2Gi=
(aTϕ(xi )−∇ϕ(xi )di)2
∥aT∇ϕ(xi )∥2G−1i
di = x∗i − xi , di = xi − xi
xi is initialized by xi and it can be iterativelyimproved (discussed later)
xi
xi
xi
f(x)=0
^
*
di
di
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 19 / 47

. . . . . .
Margin constraint
Separating hyperplane is invariant under scalar transformation of a, sowe assume
mini
∥di∥2Gi=
1
∥a∥2
Then maximizing margin is equivalent to minimizing ∥a∥2 (quadraticregularization) under the above constraints with sign
yiaTϕ(xi )−∇ϕ(xi )di)
∥aT∇ϕ(xi )∥2G−1i
≥ 1
∥a∥
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 20 / 47

. . . . . .
Linearization of constraints
Suppose an approximate solution a is given, we approximate theconstraint by linear inequality of a
aT [yiϕ(xi )−∇ϕ(xi )di − ηi ] ≥ gi
where gi : scalar function, ηi : linear function of ∇ϕ(xi ) and a
Quadratic optimization with linear constraint leads to
L(a) = aTa−n∑
i=1
αi
(aT [yiϕ(xi )−∇ϕ(xi )di − ηi ]− gi
)where αi is a Lagrange multiplier
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 21 / 47

. . . . . .
Support Vectors
Differentiating L(a) by a, we have
a =n∑
i=1
αi [yiϕ(xi )−∇ϕ(xi )di − ηi ]
Sparsity (some αi are exactly 0 as in SVM)
Classification function f (x) = aTϕ(x):if we assume a is a linear function of ϕ(xi ) and ∇ϕ(xi ),
f (x) =∑i
aiϕ(xi )Tϕ(x) + bi∇ϕ(xi )Tϕ(x)
(Since ηi is a linear function of a and ϕ(xi ))
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 22 / 47

. . . . . .
Kernelization
Reproducing kernel Hilbert space
Kernel function (strictly it should be written as an inner product)
k(x, x′) = ϕ(x)Tϕ(x′)
Derivative of kernel function
∇xk(x, x′) = ∇ϕ(x)Tϕ(x′),
∇x∇x′k(x, x′) = ∇ϕ(x)T∇ϕ(x′)
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 23 / 47

. . . . . .
Kernel trick
Kernel trick enables us to choose positive semidefinite function as akernel function instead of taking inner product in the feature space
Example (Gaussian kernel)
k(x, x′) = exp(−β∥x− x′∥2)∇xk(x, x′) = −2βk(x, x′)(x− x′),∇x∇x′k(x, x′) = 2βk(x, x′)(I − 2β(x− x′)(x− x′)T ),
Kernel version of classification function
f (x) =∑i
aik(xi , x) + bi∇k(xi , x)
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 24 / 47

. . . . . .
Estimation of xi
xi can be improved for a fixed parameter of curve a
x[l+1]i = h(x
[l ]i , a, xi ,Gi )
It may converge to a local minimum, a local maximum, or a saddlepoint. How about the convergence property?
Property of the iterative solution: Let x∗i be an equilibrium stateof the iteration step, it is a critical point of the projection point (alocal minimum/maximum, or saddle point). If it is a local maximumor saddle, the algorithm is always unstable
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 25 / 47
. . . . . .
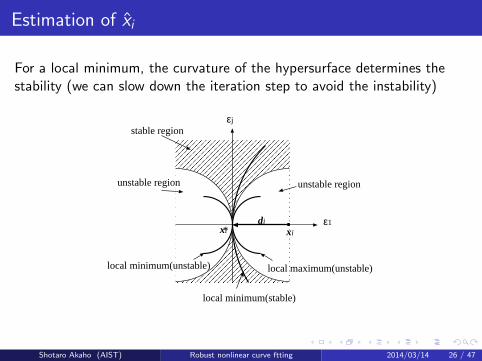
Estimation of xi
For a local minimum, the curvature of the hypersurface determines thestability (we can slow down the iteration step to avoid the instability)
stable region
unstable region
local maximum(unstable)
local minimum(stable)
local minimum(unstable)
unstable region
ε1xixi*
εj
di
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 26 / 47

. . . . . .
Example
Through experiments for synthetic and some benchmark datasets, weshowed that the input space margin and generalization performanceincreased by a proposed method
0 0.2 0.4 0.6 0.8 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0 0.2 0.4 0.6 0.8 1−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0 2 4 6 8 10 12
0.045
0.05
0.055
0.06
0.065
0.07
0.075
0.08
0.085
0.09
steps
Margin (input space)
Original Input space Margin
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 27 / 47

. . . . . .
Table of contents
...1 Fitting as a dimension reduction
...2 Feature map and minimization of the input space distance
...3 Maximization of the input space margin (Robust classification)
...4 Robust fitting by Lp cost minimization (0 < p ≤ 1)
...5 Fitting problem in very high dimensional feature space
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 28 / 47

. . . . . .
Robustness and sparseness
Typical optimization formulation for fitting
E =∑i
Cost(xi , f ) + λReg(f )
Regularization: we don’t discuss in detail hereSVM: L2, Lasso: L1 (sparse prior)
Cost:-SVM: Hinge loss of [yf (x)− 1]+-Ordinary regression: Quadratic loss (y − f (x))2
-Fitting by dimension reduction: Quadratic (vertical) distance-Here: p-th power (vertical) distance (robust + sparseness)
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 29 / 47

. . . . . .
p-th power deviation
Euclidean distance from a d-dim point xi to a hyperplaneaTx+ a0 = 0, ∥a∥ = 1 is given by |aTxi + a0|Minimizing the mean p-th power of the Euclidean distance
Rp(a) =n∑
i=1
wi |aTxi + a0|p
R1 norm (Ding2006)
R0 is meaningless (the same cost values)
We can prove Lp 0 < p ≤ 1 case is completely sparse (the optimalhyperplane passes through d points)
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 30 / 47

. . . . . .
Proof sketch
The parameter (aT , a0) is on a cylinder Q = Sd × R: convex in Rd+1
against the originParameter space is devided by n hyperplanes aTxi + a0 = 0, each P isconvex in Rd+1. ⇒ P ∩ Q is convex against the originThe (weighted) p-th deviation takes concave contour against originThe minimum of the objective function is obtained in the boundary ofP ∩ QThe procedure is performed recursively, and the (local) minimum isobtained at one of the vertex of P
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 31 / 47

. . . . . .
Example
−2 −1 0 1 2 3
02
46
8
Feature space (p = 0.5)
−2 −1 0 1 2 3
02
46
8
Input space (p = 0.5)(Yellow (Feature space p = 2) and Blue (Input space p = 2))
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 32 / 47

. . . . . .
Example
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 33 / 47

. . . . . .
Example
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 34 / 47
. . . . . .
Table of contents
...1 Fitting as a dimension reduction
...2 Feature map and minimization of the input space distance
...3 Maximization of the input space margin (Robust classification)
...4 Robust fitting by Lp cost minimization (0 < p ≤ 1)
...5 Fitting problem in very high dimensional feature space
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 35 / 47

. . . . . .
Curve fitting in RKHS
We want to extend the curve fitting in high dimensional space
PCA vs MCA (in low dimensional case, it is almost equivalent)
In infinite dimensional case, the difference taking higher eigenvaluesand discarding lower eigenvalues is large
Note: finding a dimension reduction map u = f (x) and finding a lowdimensional structure x ′ = g(x) in the input space are slightlydifferent
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 36 / 47

. . . . . .
Minor component analysis
In the first part of my talk, we considered the hyperplane aTϕ(x) = 0which is obtained by MCA
MCA is attractive because to find the optimal hyperplane wassomewhat reasonable in SVM
But in MCA case, it is hard because of too much degree of freedom
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 37 / 47
. . . . . .
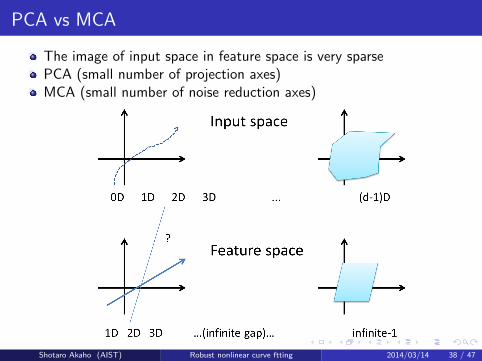
PCA vs MCA
The image of input space in feature space is very sparsePCA (small number of projection axes)MCA (small number of noise reduction axes)
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 38 / 47

. . . . . .
Two kinds of regularization
Tikhonov (SVM)
minf
∑i
Cost(f (xi )) + λΩ(∥f ∥)
f ∈ RKHS, Ω is a nondecreasing function
Ivanov-like (PCA, MCA) not precisely Ivanov
minf
∑i
Cost(f (xi )) s.t. ∥f ∥ = const
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 39 / 47
. . . . . .
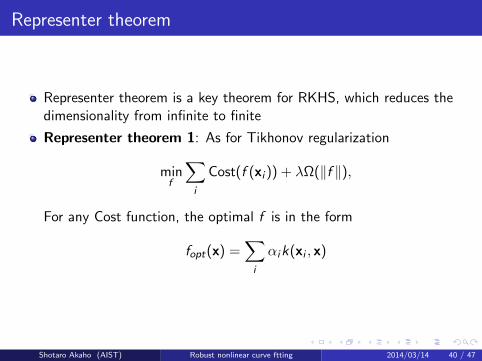
Representer theorem
Representer theorem is a key theorem for RKHS, which reduces thedimensionality from infinite to finite
Representer theorem 1: As for Tikhonov regularization
minf
∑i
Cost(f (xi )) + λΩ(∥f ∥),
For any Cost function, the optimal f is in the form
fopt(x) =∑i
αik(xi , x)
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 40 / 47

. . . . . .
Ivanov-like
Representer theorem 2: As for Ivanov-like regularization
minf
∑i
Cost(f (xi )) s.t. ∥f ∥ = const
If the Cost function satisfies decreasing property(Cost(c1f (x)) ≤ Cost(c2f (x)) when c1 ≥ c2 > 0), the optimal f is inthe form
fopt(x) =∑i
αik(xi , x)
PCA (minus of variance of f (xi )) satisfies, but MCA (variance off (xi )) does not! Even data out of samples can be good for MCA.
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 41 / 47

. . . . . .
Approach from PCA
Kernel PCA does not work as one would expect (cf. manifoldlearning)
For noise reduction, we need to solve “preimage problem” that isdifficult to solve
Even if preimage is found, it is not always what we want(non-smooth, more dimension is needed)
The structures of projection and preimage are different in nonlinearcase
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 42 / 47

. . . . . .
Preimage
Finding a dimension reduction map u = f (x) and finding a lowdimensional structure x ′ = g(x) in the input space are slightly different innonlinear case
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 43 / 47

. . . . . .
Example
Preimage is somewhat unstable and not smooth
−4 −2 0 2 4
−2
02
46
8
yt
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxx xxxxxxx
xxxxxxxxxxxxxxxx
xxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxx
−4 −2 0 2 4
−2
02
46
8
yt
xxxxxxxxxxxxx
xxxxxxx
xxxxxxxxxxxxx
xxxxxx
xxxxxxxxxxxxx
xxxxxx
xxxxxxxxxxxxx
xxxxxx
xxxxx xxxxxxx
xxxxxxxx
xxxx
x xx xx x xx
xxxxxxx
xxx
xxx x x x x
xxxxxxxxxx
xx
xxx x x x
xx
xxxxxxxxxx
xx
xx x x
xx
xxxxxxxxxxxx
xx
xx
xx
xxxxxxxxxxxxxxx
xx
x
x xxxxxxxxxxxxxxxx x
xx
xxxxxxxxxxxxxxxxx x xxxxxxxxxxxxxxxxxx x xxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxx x xxxxxxxxxxxxxxxxxx x xxxxxxxxxxxxxxxxxx x xxxxxxxxxxxxxxxxxx x xxxxxxxxx
−4 −2 0 2 4
−2
02
46
8
yt
xxxxxxxxx xx xxxxxxxxx
xxxxxxx x x xx xxxxxxxx
xxxxxxx x x x x xxxxxxxx
xxxxxx x x x x x xxxxxxxxx
xxxx x x x x x x xxxxxxxxx
xxxxx x x x x x xxxxxxxxx
xxxxx x x x x xxxx
xxxxxx
xxxxxx x x x x
xxxxxxxxxx
xxx
x x x xx
xxxxxxxxxxxx
xxx
xx
xx
xxxxxxxxxxxxxxx
xx
x
x xxxxxxxxxxxxxxxx x
xx
xxxxxxxxxxxxxxxxx x xxxxxxxxxxxxxxxxxx x xxxxxxxxxxxxxxxxxx x xxxxxxxxxxxxxxxxxx x xxxxxxxxxxxxxxxxxx x
xxxxxxxxxxxxxxxxx x x xxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxx
xx xxxxxxxx
−4 −2 0 2 4
−2
02
46
8
yt
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxx
xxx xx xx xxxxxxxxxxxxxx
xx x x x x xxxxxxxxxxxxx
x x x x x x xxxxxxxxxxxxxx x x x x x xxxxxxxxxxxxxx x x x x xxxxxxxxxxxxxxxx x x x xxxxxxxxxxxxxxx x
x x x xxxxxxxxxxxxxxx x x
x x xxxxxxxxxxxxxxxx x x
x xxxxxxxxxxxxxxxx x x x
xxxxxxxxxxxxxxxx x x x x
xxxxxxxxxxxxxxx x x x xxxxxxxxxxxxxxxxx x xxxxxxxxxxxxxxxxxx x xxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxx xxxxxxxxxxxxxxxxxxx xxxxxxxxxx
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 44 / 47

. . . . . .
Approach from MCA
Kernel MCA achieves smoother curve/surface
Too many freedom (even in the sample space)
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 45 / 47

. . . . . .
Example
MCA gives too many good curves! (their linear combination as well;Fujiki+2013)Further out of sample points will increase the freedomDoes sparsity help to choose a good curve? → open
−0.00032
−0.00032
−0.00071
−0.00071
−0.00071
−0.0013
−0.0013
0
0.00032 0.00032
0.00071
0.00071
0.0013
−4 −2 0 2 4
−2
02
46
8
−8.3e−05
−8.3e−05
−0.00021
−0.00021
−0.00052
−0.00052
0
0
8.3e−05
8.3e−05
0.00021
0.00021
0.00021
0.00052
−4 −2 0 2 4
−2
02
46
8
−4.6e−05
−4.6e−05
−0.00011
−0.00011
−0.00011
−0.00011
−0.00017
−0.00017 −0.00017
−0.00017
0
0
4.6e−05
4.6e−05
0.00011
0.00011
0.00017
0.00017
−4 −2 0 2 4
−2
02
46
8
−2.5e−05
−2.5e−05
−7.2e−05
−0.00019
0
0
2.5e−05
2.5e−05
7.2e−05
7.2e−05
0.00019
0.00019
−4 −2 0 2 4
−2
02
46
8
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 46 / 47

. . . . . .
Concluding remarks
The method to incorporate input space metric is proposed
Finding the projection point to hypersurface is more stable thanfinding the preimage
Lp cost function is effective when many outliers exist
MCA has a potential to give a good curve fitting, but choosing a goodcurve obtaining good generalization performance is not established
Shotaro Akaho (AIST) Robust nonlinear curve ftting 2014/03/14 47 / 47