note: 2005 is the world year of physics! in 2005, there will be a world-wide celebration of the...
TRANSCRIPT


NOTE: 2005 is the World Year of Physics!In 2005, there will be a world-wide celebration of
the centennial of Einstein's famous 1905 papers on Relativity, Brownian Motion, & the Photoelectric Effect (for which he won the Nobel Prize!).
A web page telling you more:
<http://www.physics2005.org/>

Chapter 7: Special RelativitySect. 7.1: Basic Postulates
• Special Relativity: One of 2 major (revolutionary!) advances in understanding the physical world which happened in the 20th Century! Other is Quantum Mechanics of course!
• Of the 2, Quantum Mechanics is more relevant to everyday life & also has spawned many more physics subfields.
• However (my personal opinion), Special Relativity is by far the most elegant & “beautiful” of the 2. In a (relatively) simple mathematical formalism, it unifies mechanics with E&M!
• The historical reasons Einstein developed it & the history of its development & eventual acceptance by physicists are interesting. But (due to time) we will discuss this only briefly.
• The philosophical implications of it, the various “paradoxes” it seems to have, etc. are interesting. But (due to time) we’ll discuss this only briefly.

• Newton’s Laws: Are valid only in an Inertial Reference Frame: Defined by Newton’s 1st Law:– A frame which isn’t accelerating with respect to the “stars”.– Any frame moving with constant velocity with respect to an inertial
frame is also an inertial frame!
• Galilean Transformation: (Galilean Relativity!)
2 reference frames: S, time & space
coordinates (t,x,y,z) & S´, time & space
Coordinates (t´,x´,y´,z´). S´ moving
relative to S with const velocity v in the
+x direction. Figure. Clearly:
t´= t , x´ = x - vt, y´= y, z´ = z
Galilean Transformation
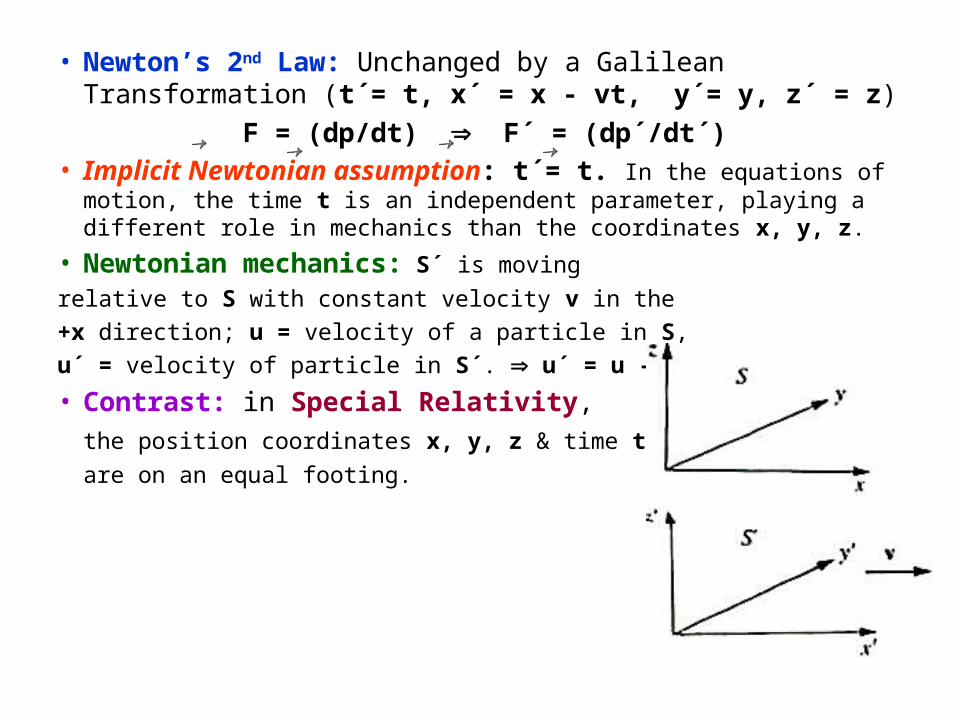
• Newton’s 2nd Law: Unchanged by a Galilean Transformation (t´= t, x´ = x - vt, y´= y, z´ = z)
F = (dp/dt) F´ = (dp´/dt´)• Implicit Newtonian assumption: t´= t. In the equations of motion, the
time t is an independent parameter, playing a different role in mechanics than the coordinates x, y, z.
• Newtonian mechanics: S´ is moving
relative to S with constant velocity v in the
+x direction; u = velocity of a particle in S,
u´ = velocity of particle in S´. u´ = u - v
• Contrast: in Special Relativity,
the position coordinates x, y, z & time t
are on an equal footing.

• Electromagnetic Theory (Maxwell’s equations): Contain a universal constant c = The speed of Light in Vacuum. – This is inconsistent with Newtonian mechanics!
– Einstein: Either Newtonian Mechanics or Maxwell’s equations need to be modified. He modified Newtonian Mechanics.
2 Basic Postulates of Special Relativity
1. THE POSTULATE OF RELATIVITY: The laws of physics are the same to all inertial observers. This is the same as Newtonian mechanics!
2. THE POSTULATE OF THE CONSTANCY OF THE SPEED OF LIGHT: The speed of light, c, is independent of the motion of its source. A revolutionary idea! Requires modifications of mechanics at high speeds.
2 Basic Postulates
1. RELATIVITY 2. CONSTANT LIGHT SPEED
Covariant A formulation of physics which satisfies 1 & 22. The speed of light c is the same in all coordinate systems.
• 1 & 2 Space & Time are considered 2 aspects (coordinates) of a single Spacetime. = A 4d geometric framework (“Minkowski Space”)
The division of space & time is different for
different observers. The meaning of “simultaneity” is different for different observers. Space & time get “mixed up” in transforming from one inertial frame to another.

• Event A point in 4d spacetime. – To make all 4 dimensions have the same units, define the time dimension
as ct.
• The square of distance between events A = (ct1,x1,y1,z1) &
B = (ct2,x2,y2,z2) in 4d spacetime:
(Δs)2 c2(t2-t1)2 - (x2-x1)2 - (y2-y1)2 - (z2-z1)2
or: (Δs)2 c2(Δt)2 - (Δx)2 - (Δy)2 - (Δz)2 (1)– Note the different signs of time & space coords!
• Now, go to differential distances in spacetime:
(1) (ds)2 c2(dt)2 - (dx)2 - (dy)2 - (dz)2 (2) A body moving at v: (dx)2 + (dy)2 + (dz)2 = (dr)2 = v2(dt)2
(ds)2 = [c2- v2](dt)2 > 0
Bodies, moving at v < c, have (ds)2 > 0

(ds)2 c2(dt)2 - (dx)2 - (dy)2 - (dz)2 (2)
(ds)2 > 0 A timelike interval
(ds)2 < 0 A spacelike interval
(ds)2 = 0 A lightlike or null interval• For all observers, objects which travel with v < c have (ds)2 >
0 Such objects are called tardyons.• Einstein’s theory & the Lorentz Transformation
The maximum velocity allowed is v = c. However, in science fiction, can have v > c. If v > c, (ds)2 < 0
Such objects are called tachyons.• A 4d spacetime with an interval defined by (2) Minkowski
Space

• The interval between 2 events (a distance in 4d Minkowski space) is a geometric quantity.
It is invariant on transformation
from one inertial frame S to
another, S´ moving relative to
S with constant velocity v:
(ds)2 (ds´)2 (3)
(ds)2 The invariant spacetime interval. • (3) The transformation between S & S´ must involve the
relative velocity v in both space & time parts. Or: Space & Time get mixed up on this transformation! “Simultaneity” has different meanings for an observer in S & an observer in S´

(ds)2 (ds´)2 (3)• Relatively simple consequences of (3):
1. Time Dilation• S Lab frame, S´ moving frame
(3) Time interval dt measured in the lab
frame is different from the time interval dt´ measured in the moving frame. To distinguish them: Time measured in the rest (not moving!) frame of a body (S´if the body moves with v in the lab frame) Proper time τ. Time measured in the lab frame (S) Lab time t. For a body moving with v:
In S´, (ds´)2 = c2(dτ)2 ,
In S, (ds)2 c2(dt)2 - (dx)2 - (dy)2 - (dz)2 =
c2(dt)2 - (dr)2 = c2(dt)2 - v2(dt)2 = c2(dt)2[1-(v2)/(c2)]

Time Dilation
(ds)2 (ds´)2 (3)• A body moving with v:
In S´, (ds´)2 = c2(dτ)2 ,
In S, (ds)2 = c2(dt)2[1-(v2)/(c2)]• Using these in (3)
c2(dτ)2 = c2(dt)2[1-(v2)/(c2)]
Or: dt γdτ (4)
where: γ 1/[1 - β2]½ [1 - β2]-½ , β (v/c)
(4) dτ < dt “Time dilation”
“Moving clocks (appear to) run slow(ly)”

(ds)2 (ds´)2 (3)• Relatively simple consequences of (3):
2. “Simultaneity” is relative!• Suppose 2 events occur simultaneously in
S ( the lab frame), but at different space
points (on the x axis, for simplicity). Do they occur simultaneously in S´ ( the moving frame)?
In S, dt = 0, dy = dz = 0, dx 0. In S, (ds)2 = - (dx)2
In S´, (invoking the Lorentz transformation ahead of time) dy´=dz´=0, In S´, (ds´)2 = c2(dt´)2 - (dx´)2
(3) - (dx)2 = c2(dt´)2 - (dx´)2 Or: c2(dt´)2 = (dx´)2 - (dx)2 (invoking the Lorentz
transform ahead of time) (dx´)2 = γ2(dx)2
c2(dt´)2 = [γ2 -1] (dx)2 Or (algebra) c dt´ = γβdx
The 2 events are not simultaneous in S´

(ds)2 (ds´)2 (3)• Relatively simple consequences of (3):
3. Length Contraction• Consider a thin object, moving with v || to x
in S. Let S´ be attached to the moving object. Instantaneous
measurement of length. In S: dt = 0. For an infinitely thin object:
dy = dz = 0. In S, (ds)2 = - (dx)2 In S´, (invoking the Lorentz transformation ahead
of time) dy´=dz´=0,
In S´, (ds´)2 = c2(dt´)2 - (dx´)2 (3) -(dx)2 = c2(dt´)2 - (dx´)2 Or: (dx´)2 = c2(dt´)2 + (dx)2 (invoking the Lorentz transform ahead of time & using results just obtained) c2(dt´)2 = γ2β2(dx)2
(Algebra) (dx´)2 = γ2(dx)2 Or dx´ = γdx. For finite length: L´ = γL or L = (L´)γ-1 < L´
Lorentz-Fitzgerald Length Contraction

(ds)2 (ds´)2 (3)• (3) Spacetime is naturally divided into 4 regions. For
an arbitrary event A at x = y = z = t = 0, we can see this by looking at the “light cone” of the event. Figure.
the z spatial dimension is suppressed.
Light cone = set of (ct,x,y) traced
out by light emitted from ct = x
= y = 0 or by light that reaches
x = y = 0 at ct = 0. The past &
the future are inside the light cone.

(ds)2 (ds´)2 (3)• Consider event B at time tB such that (dsAB)2 > 0 (timelike). (3) All
inertial observers agree on the time order of events A & B. We can always choose a frame where A & B have the same space coordinates. If tB < tA = 0
in one inertial frame, will be so in all
inertial frames. This region is called
THE PAST.
• Similarly, consider event C at time tC
such that (dsAC)2 > 0, (3) All inertial
observers agree on the time order of events A & C. If tC>tA= 0
in one inertial frame, it will be so in all inertial frames.
This region is called THE FUTURE.

(ds)2 (ds´)2 (3)• Consider an event D at time tD such that (dsAD)2 < 0 (spacelike). (3)
There exists an inertial frame in which the time ordering of tA & tD are reversed or even made equal.
This region is called
THE ELSEWHERE
or THE ELSEWHEN. In the region
in which D is located, there exists an
inertial frame with its origin at event
A in which D & A occur at the same time but in which D is somewhere else (elsewhere) than the location of A. There also exist frames in which D occurs before A & frames in which D occurs after A (elsewhen).

(ds)2 (ds´)2 (3)• The light cone obviously separates the past-future from the
elsewhere (elsewhen). On the light cone, (ds)2 = 0. Light cone = a set of spacetime points from which emitted light could reach A
(at origin) & those points from which
light emitted from event A could
reach.• Any interval between the origin & a
point inside the light cone is timelike: (ds)2 > 0. Any interval between the origin & a point outside the light cone is spacelike: (ds)2 < 0.

Sect. 7.2: Lorentz Transformation• Lorentz Transformation: A “derivation” (not in the text!)
• Introduce new notation: x0 ct, x1 x,
x2 y, x3 z. Lab frame S & inertial frame
S´, moving with velocity v along x axis.
• We had: (ds)2 (ds´)2 . Assume that this also
holds for finite distances: (Δs)2 (Δs´)2 or
(in the new notation)
(Δx0)2- (Δx1)2 - (Δx2)2 - (Δx3)2 = (Δx0´)2 - (Δx1´)2 - (Δx2´)2 - (Δx3´)2
• Assume, at time t = 0, the 2 origins coincide.
Δxμ = xμ & Δxμ ´ = xμ ´ (μ = 0,1,2,3)
(x0)2- (x1)2 - (x2)2 - (x3)2 = (x0´)2 - (x1´)2 - (x2´)2 -(x3´)2
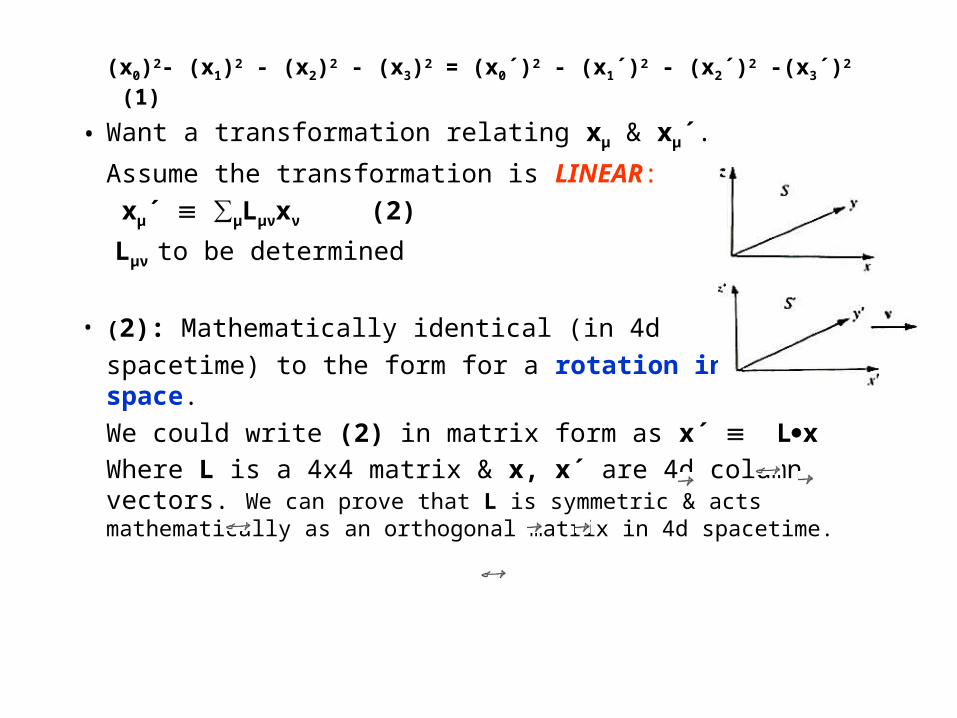
(x0)2- (x1)2 - (x2)2 - (x3)2 = (x0´)2 - (x1´)2 - (x2´)2 -(x3´)2 (1)
• Want a transformation relating xμ & xμ´.
Assume the transformation is LINEAR:
xμ´ ∑μLμνxν (2)
Lμν to be determined
• (2): Mathematically identical (in 4d
spacetime) to the form for a rotation in 3d space.
We could write (2) in matrix form as x´ Lx
Where L is a 4x4 matrix & x, x´ are 4d column vectors. We can prove that L is symmetric & acts mathematically as an orthogonal matrix in 4d spacetime.

(x0)2- (x1)2 - (x2)2 - (x3)2 = (x0´)2 - (x1´)2 - (x2´)2 -(x3´)2 (1)
xμ´ ∑μLμνxν (2)
• Now, invoke some PHYSICAL REASONING:
The motion (velocity v) is along the x axis. Any physically reasonable transformation will not mix up x,y,z (if the motion is parallel to x; that is, it involves no 3d rotation!).
y = y´ , z = z´ or x2 = x2´, x3 = x3´
(1) becomes: (x0)2 - (x1)2 = (x0´)2 - (x1´)2 (3)
Also: L22 = L33 = 1. All others are zero except: L00, L11, L01, & L10. Further, assume that the transformation is symmetric. Lμν = Lνμ (this is not necessary, but it simplifies math. Also, after the fact we find that it is symmetric).

• Under these conditions, (2) becomes:
x0´ = L00 x0 + L01 x1 (2a)
x1´ = L01 x0 + L11 x1 (2b)
(x0)2 - (x1)2 = (x0´)2 - (x1´)2 (3)
• (2a), (2b), (3): After algebra we get:
(L00)2 - (L01)2 = 1 (4a); (L11)2 - (L01)2 = 1 (4b)
(L00 - L11)L01 = 0 (4c)
• (4a), (4b), (4c): This looks like 3 equations & 3 unknowns. However, it turns out that solving will give only 2 of the 3 unknowns (the 3rd equation is redundant!).
We need one more equation!

• To get this equation, consider the origin of the S´ system
at time t in the S system. (Assume, at time
t = 0, the 2 origins coincide.) Express it in
the S system: At x1´ = 0, (2b) gives:
0 = L01 x0 + L11 x1
We also know: x = vt or x1 = βx0
Combining gives: L01 = - βL11 (5)
Along with (L00)2 - (L01)2 = 1 (4a)
(L11)2 - (L01)2 = 1 (4b); (L00 - L11)L01 = 0 (4c)
This finally gives: L11 = γ =1/[1 - β2]½ = [1 - (v2/c2)]-½
and (algebra): L01 = - βγ , L00 = γ

• Putting this together, The Lorentz Transformation (for v || x): x0´ = γ(x0 - βx1), x2´ = x2
x1´ = γ(x1 - βx0), x3´ = x3
• The inverse Transformation (for v || x):
x0 = γ(x0´ + βx1´), x2= x2´
x1 = γ(x1´ + βx0´), x3 = x3´
• In terms of ct,x,y,z: The Lorentz Transformation is
ct´ = γ(ct - βx) (t´ = γ[t - (β/c)x])
x´ = γ(x - βct), y´ = y, z´ = z, β = (v/c)• This reduces to the Galilean transformation for v <<c
β << 1, γ 1: x´= x - vt, t´= t, y´= y, z´= z

• Lorentz Transformation (for v || x) in terms of a transformation (“rotation”) matrix in 4d spacetime (a “rotation” in the x0-x1 plane):
x´ Lx
Or:
x0´ γ -βγ 0 0 x0
x2´ = -γβ γ 0 0 x1
x3´ 0 0 1 0 x2
x4´ 0 0 0 1 x3

• The generalization to arbitrary orientation of velocity v is straightforward but tedious!
• The Lorentz Transformation (for general orientation of v):
ct´ = γ(ct - βr),
r´ = r + β-2(βr)(γ -1)β - γctβ • In terms of the transformation (“rotation”) matrix in 4d
spacetime: x´ Lx

• Briefly back to the Lorentz Transformation (v || x):
x´ Lx , L A “Lorentz boost” or A “boost”
• Sometimes its convenient to parameterize the transformation in terms of a “boost parameter” or “rapidity” ξ. Define:
β tanh(ξ) γ = [1 - β2]-½ = cosh(ξ), βγ = sinh(ξ) Then:
x0´ cosh(ξ) -sinh(ξ) 0 0 x0
x2´ = -sinh(ξ) cosh(ξ) 0 0 x1
x3´ 0 0 1 0 x2
x4´ 0 0 0 1 x3
x0´= x0 cosh(ξ) - x1 sinh(ξ), x1´= -x0 sinh(ξ) + x1 cosh(ξ)
Should reminds you of a rotation in a plane, but we have hyperbolic instead of trigonometric functions. From complex variable theory: “imaginary rotation angle”!

• These transformations map the origins of S & S´ to (0,0,0,0).
L = a “rotation” in 4d spacetime.
• A more general transformation is
The Poincaré Transformation:
“Rotation” L in 4d spacetime + translation a
x´ Lx + a If a = 0 Homogeneous Lorentz Transformation