non-euclidean geometryfaculty.mansfield.edu/hiseri/old courses/sp2013/ma3330... · 2013-01-28 ·...
TRANSCRIPT

CHAPTER 5
Non-Euclidean Geometry
1. A model for hyperbolic geometry
When you build an axiom system for something like Euclidean geometry,
you try to gather a basic set of statements that, if assumed to be true, define the
object you’re trying to axiomatize. In the case of Euclidean geometry, one such axiom
system is Hilbert’s. The hope is that if you take the set of theorems you can prove
from Hilbert’s axioms, they are exactly the same as the theorems you would expect
to be true in your vision of Euclidean geometry.
Beyond the issue of getting the correct set of theorems, there are three things you
look for in an axiom system, consistency, independence, and completeness. An axiom
system is consistent, if it does not lead to contradictions. If, in your axiom system,
you could prove that the angle sum of a triangle is always 180◦, and you could also
prove that the angle sum is sometimes not 180◦, then your axiom system would not
be consistent.
An axiom system is independent, if you cannot prove any of your axioms from
the others. In the attempt to prove Euclid’s Fifth Postulate from the other axioms,
the underlying suspicion was that Euclid’s axiom system was not independent. With
independence, we are wanting to ensure that our set of axioms is minimal, and that
every axiom is actually needed.
Finally, an axiom system is complete, if we cannot add another axiom without
losing consistency or independence. Hilbert’s axiom system has been shown to be
incomplete several times since it’s original formulation, and additional axioms were
introduced to fix the various problems. We probably will never be absolutely sure
about the completeness of this axiom system, but it seems like the general assumption
is that Hilbert’s axiom system is complete.
None of these things is easy to prove, but the most important and easiest to
verify is consistency (note the use of verify, since prove would be too strong). In this
86

2. THE POINCARE DISK 87
assignment, we wish to investigate how the axioms of hyperbolic geometry can be
shown to be consistent, and at the same time, determine that the neutral geometry
axiom set is not complete.
1.1. Exercises.
–1– State Euclid’s Axiom.
–2– State the Hyperbolic Axiom.
–3– If you had both Euclid’s Axiom and the Hyperbolic Axiom in the same axiom
system, would that axiom system be consistent?
–4– Assuming that neutral geometry plus Euclid’s Axiom and neutral geometry
plus the Hyperbolic Axiom are both consistent, can neutral geometry be
complete?
–5– From what we’ve been exploring the last couple of weeks, neutral geometry
plus Euclid’s Axiom plus angle sum of a triangle is 180◦ would definitely not
be (consistent, independent, complete).
2. The Poincare Disk
We can test the consistency of hyperbolic geometry by comparing it to some-
thing that we have confidence in. The mathematics we work with today is built on
axioms systems for logic and set theory. I don’t want to get into it too much,
but logic and set theory are simpler than geometry, and their axioms systems were
formulated to be axiom systems (Euclid was not an expert in axioms systems). As
a result, we can be more confident in these modern systems. I have great confidence
in these axiom systems, but it is only confidence. Mathematicians like to think that
mathematics is absolute truth, but at best, we only have faith in our understanding
of logic. Mathematics is not a religion exactly, but at its foundations, we believe in
mathematics with fanatical conviction.
If we can build a mathematical object, a model, within our modern mathematical
structure, and the axioms of hyperbolic geometry are true for our model, then we
can say that hyperbolic geometry, as an axiom system, is as consistent as the rest
of mathematics. That’s what we want to do here. The xy-plane is a model for
Euclidean geometry, and we saw that Euclid’s postulates, and therefore, some of

2. THE POINCARE DISK 88
Hilbert’s axioms, were true in that model. I think it’s safe to assume that all of
Hilbert’s axioms are true in our xy-plane model for Euclidean geometry.
The model for hyperbolic geometry to be discussed in this assignment is called
the Poincare disk. Poincare’s model lives in the xy-plane (a.k.a, R2), and consists
of all of the points inside a fixed circle. For convenience, let’s nail down the circle.
The points in this geometry are the points in the set P defined by
(163) P ={
(x, y) ∈ R2 | x2 + y2 < 1}
.
In words, P is the set of points inside the unit circle, but not including the circle itself.
We might call this an open disk. The lines in this geometry are parts of circles. In
particular, we will consider any circle that intersects the unit circle at right angles.
The intersection of any such circle and P will be a line. It is convenient to think of
a straight line as a circle with infinite radius, and we will do that. Diameters of the
unit circle, therefore, are also lines (not including the endpoints). Figure 1 shows a
few lines in the Poincare Disk. Viewed in terms of the xy-plane, these are straight
lines or circles that meet the boundary at right angles.
Figure 1. Some lines in the Poincare Disk.
Note that near the center of Figure 1 there is a small triangle. Since one of the
edges of this triangle is curved slightly inward, two of the angles are slightly smaller
than they would be if that edge were straight. Since the straight lines only pass
through the center of the disk, we will never have a triangle with three straight sides.
We will measure angles in this geometry as we see them (technically, we measure the
angles between tangent lines).

2. THE POINCARE DISK 89
Basic Principle 4. Since the sides of triangles in the Poincare disk curve in-
ward, their angle sums will be less than 180◦.
There is a horizontal diameter and a quarter circle in the lower left that intersect
on the unit circle on the left. Since the unit circle is not part of P, these two lines
do not intersect. Since according to Euclid’s definition of parallel lines (and ours),
parallel lines are those pairs that do not intersect. Therefore, these two lines are
parallel.
Figure 2. The lines m and n contain P and are parallel to l.
In Figure 2, the lines m and n intersect l at the boundary, so in the model, they
do not actually intersect. Both lines, therefore, are parallel to l. This model satisfies
the Hyperbolic Axiom (there are at least two parallels through P ).
If you were to consider all of the lines through P in Figure 2 some are parallel to
l and some intersect. Imagine taking a single line t through P and rotating it about
P . You will find that t intersects l for awhile, and then it will be parallel. A little
later, it will start intersecting again. During the change, there will be one position
such that everything before is not parallel and everything after is parallel. At this
position itself, is t parallel or does it intersect l? It has to be parallel, because if
not, then there would be a point of intersection. If this happens, then there would
be other points of intersection on either side of it on l, and therefore, there would
be non-parallels on either side of it. In hyperbolic geometry, therefore, we have the
phenomenon of a last parallel.

3. DISTANCE IN THE POINCARE MODEL 90
3. Distance in the Poincare model
One important aspect of this model must be different from how it looks. In
hyperbolic geometry, lines must be infinitely long. In order to satisfy the axioms of
hyperbolic geometry, therefore, we must define distances in a funny way. I won’t give
you the general formula for the distance between any two points (this formula would
be called the metric). I’ll just tell you what the distance between any point and the
point in the center of the model. For any point P ∈ P, if the distance from the center
is r, as we would measure it in the xy-plane, then the hyperbolic distance will be
(164) d(0, r) = ln
(1 + r
1 − r
).
As a point is moved towards the boundary, r would approach 1. Its hyperbolic
distance from the center would therefore approach
(165) limr→1
d(0, r) = limr→1
ln
(1 + r
1 − r
)= ∞.
The hyperbolic distance from the center out to the boundary, therefore, must be
infinite.
3.1. Exercises.
–1– Suppose you were 2-dimensional, and the Poincare disk was your universe.
Suppose also that when you stood on the x-axis at the center, the top of
your head would be at the point (0, 0.1). What is your height in hu’s (hu =
hyperbolic unit)?
–2– If my height were 0.3 hu’s, and I stood on point (0, 0.8) with my head pointing
up the y-axis, I could figure out where my head was. My feet would be

5. IS HYPERBOLIC GEOMETRY REAL? 91
ln(
1.8.2
)= 2.197 hu. My head would be at ln
(1+r1−r
)hu. Therefore,
.3 = ln
(1 + r
1 − r
)− 2.197
2.497 = ln
(1 + r
1 − r
)
e2.497 =1 + r
1 − r
(1 − r)e2.497 = 1 + r
e2.497 − 1 = r + re2.497
e2.497−1 = r(1 + e2.497)
e2.497 − 1
1 + e2.497= r
(166)
Therefore, r = 0.848, and my head would be at (0, 0.848). If you were
standing on the point (0, 0.9) with your head pointing up the y-axis, where
would your head be?
4. What does the Poincare disk tell us?
With the definitions I’ve given you, and a few more, you could show that all the
axioms of neutral geometry are true in this model, and in addition, the Hyperbolic
Axiom is true in this model. It might take you awhile, but you could show that all
of the definitions are well-defined (i.e., don’t give contradictory answers). This would
mean that the Poincare disk is consistent within our modern mathematical system,
and this would imply that the axioms of hyperbolic geometry are as consistent as the
axioms for logic and set theory. In other words, if the axioms of hyperbolic geometry
are bad, then all of mathematics is in trouble. That might be interesting, actually.
As far as independence and completeness are concerned, the axioms of hyperbolic
geometry are probably both independent and complete. I’m not an expert on such
matters, but I don’t think either has been proven.
5. Is hyperbolic geometry real?
Most of us seem to be comfortable with the assumption that our universe is a
3-dimensional Euclidean space, the xyz-space of calculus. In fact, Bertrand Russell

5. IS HYPERBOLIC GEOMETRY REAL? 92
filled a small book, I think it’s called An Essay on the Foundations of Geometry,
“proving” that this was indeed the case. This essay was written around 1900. About
30 years later, Russell states as fact that our universe is a manifold. We’ll get to
manifolds later, but most manifolds are definitely not Euclidean. I’m working from
memory here, but I think the second reference is in something called Principles of
Mathematics. I’m been trying to track these down for awhile.
Now, the Poincare disk lives in the Euclidean plane, so it definitely seems sub-
ordinate to Euclidean geometry. We could, perhaps, put it on more equal footing
by stretching it out so that distances could be measured directly. Since things get
smaller towards the boundary, we would have to stretch the Poincare’s disk more and
more as we move away from the center. If we did this, we would get something called
the hyperbolic plane, and this plane will stretch out to infinity.
What would the hyperbolic plane look like? Well, if you took a small piece
of the Poincare disk, and did the stretching, you would get something that looked
like the picture on page 133 of Bonola’s Non-Euclidean Geometry. Notice that it is
really wrinkly. This is because hyperbolic geometry spreads out faster than Euclidean
geometry spreads out. For example, a circle in hyperbolic geometry has a larger
circumference than a circle in Euclidean geometry with the same radius. So in some
sense, the hyperbolic plane is too big to fit in our supposedly Euclidean space, so it
has to be crammed into our space, and it gets wrinkled in the process. This is not
proof that our space is Euclidean, however. Later, we will describe how hyperbolic
a space is in terms of curvature. We’ll say that the hyperbolic plane has curvature
K = −1. A hyperbolic plane with curvature K = −.003 might look perfectly flat in
our space, because if our universe is hyperbolic, it would have very small curvature.
We’ll spend much of the rest of the semester trying to understand these ideas, but
let me end with this. We have direct experience with the geometry of our universe
only on the surface of the earth, and the visible universe has a radius of only 10-
15 billion light-years. There are an infinite number of distinctly different geometric
spaces consistent with the information we have. One of the problems I have with
Hilbert’s axioms is that they lead to only two of these spaces.

6. ANOTHER MODEL FOR HYPERBOLIC GEOMETRY 93
6. Another model for hyperbolic geometry
Before we move on to a more contemporary view of geometry, I want to finish off
this line of geometric reasoning. So far, we have seen that Euclid came up with a set of
definitions and postulates for what we call Euclidean geometry. Much later, Hilbert
formalized Euclid’s system into a somewhat modern axiom system using Euclid’s
approach as much as possible. For convenience, let’s pretend that Euclid’s system
of postulates and Hilbert’s axiom system are the same, since Hilbert’s work can be
thought of as patching up Euclid’s original attempt.
Until the time of Gauss, Lobachevski, and Bolyai, the general assumption was
that Euclid’s axiom system was not independent. In particular, it was conjectured
that Euclid’s Fifth Postulate/Euclid’s Axiom could be proven from the other axioms.
Gauss, Lobachevski, and Bolyai realized that this was impossible. In fact, there was
another geometry, hyperbolic geometry, that satisfied all of the “other” axioms,
but not Euclid’s Fifth Postulate. This marked the beginning of what is generally
called non-Euclidean geometry. Hyperbolic geometry, after all, is a geometry
that is not Euclidean.
Somewhat oddly, non-Euclidean geometry doesn’t refer to all geometries that
are not Euclidean, but for the most part, only refers to hyperbolic geometry and
something called elliptic geometry. We’ll talk about elliptic geometry later, but
it is very similar to, or exactly the same as (depending on who you’re talking to),
spherical geometry.
As I’ve said before, hyperbolic geometry is sometimes referred to as the geometry
of Lobachevski and/or Bolyai, although Gauss, Cayley, and Klein are important in
its development. The other non-Euclidean geometry, elliptic geometry, is sometimes
referred to as the geometry of Riemann. The names hyperbolic and elliptic are
due to Felix Klein. The study of geometry through axiom systems like Hilbert’s is
called synthetic geometry, and this line of geometric reasoning pretty much comes
to a dead end at the geometries of Euclid, Lobachevski/Bolyai, and Riemann. The
study of geometry through coordinates, equations, and functions is called analytic
geometry, and we will start to head in that direction today.

7. THE HALF-PLANE MODEL FOR HYPERBOLIC GEOMETRY 94
7. The Half-Plane Model for Hyperbolic Geometry
As much as you can, try to think of the hyperbolic plane as an infinite plane
that is no more or less real than the Euclidean plane (i.e., the xy-plane). Our brains
have a very strong Euclidean bias. Try to suppress this geometricism. Because of
this geometrism, it is difficult to visualize the hyperbolic plane, but by deforming the
hyperbolic plane, we can squeeze it into our familiar Euclidean plane as an open disk,
the Poincare disk. This is only one way of visualizing the hyperbolic plane, and I
want to explore another way here.
The set of points in the half-plane model is the set
(167) HP ={
(x, y) ∈ R2 | y > 0}
.
These are all the points above the x-axis, but not including the x-axis itself. In other
words, we have an open upper-half-plane. As we deform the hyperbolic plane into
the upper-half of the Euclidean plane this way, the lines in the hyperbolic plane be-
come half-circles with endpoints on the x-axis (but without the endpoints) or vertical
rays with endpoint on the x-axis (but not the endpoint). Note that the lines intersect
the boundary at right angles. In Figure 3, a few of the lines are shown. Be clear
on the fact that the endpoints on the x-axis are not points on the lines. This allows
infinite lines to correspond point for point to these circles and rays.
Figure 3. Some lines in the Half-Plane Model.
Compared to the Poincare disk, I don’t think this model gives as good a general
feeling for the hyperbolic plane, but in many ways, computations are easier to do here.
In this model, the angles between lines in the hyperbolic plane have been preserved

7. THE HALF-PLANE MODEL FOR HYPERBOLIC GEOMETRY 95
under the deformation. That is, the angles we see are the same as the actual angles.
The distances have been warped, however. They have been changed by a factor of
y, where y is the height above the x-axis. When we transform back to the hyperbolic
plane, therefore, we have to divide distances by y.
ϕ
2
Figure 4. An arc of the circle of radius 2. This would correspond to
a hyperbolic line segment in the hyperbolic plane.
As an example, consider the half-circle of radius 2 in Figure 4. In the Euclidean
plane, the circumference of the entire circle is 2π(2) = 4π. Since there are 2π radians
around the circle, the length of the arc s divided by C must be equal to ϕ2π
. Therefore,
(168) s = 2ϕ.
If ϕ = π6
radians, for example, then s = π3. This is only the length of the segment
as we see it in the Euclidean plane. We want to know the hyperbolic length. The
highest point on the arc is at height y = 2, and the rest of the arc is not too much
lower. We can say, therefore, that the height is approximately y = 2 for the entire
arc. To get an approximation of the length of the corresponding hyperbolic segment,
we need to divide the length of the arc by y = 2, so the hyperbolic length is about π6.
This is only an estimate, however, since the height of the points on the arc are not
all exactly y = 2.
7.1. Computation of hyperbolic length. As we move along a circle, the con-
version factor to hyperbolic length keeps changing. In order to do the conversion,
therefore, we need to do an integration. File this away in your brain: In general, the
conversion between geometries is a calculus problem.

7. THE HALF-PLANE MODEL FOR HYPERBOLIC GEOMETRY 96
θ
dθ
ds
r
r sin θ
Figure 5. A small arc of a circle of radius r. This would correspond
to a small hyperbolic line segment in the hyperbolic plane.
OK. Let’s take a circle of radius r in the half-plane model. We’ll talk about points
on the circle in terms of the angle θ shown in Figure 5. Measuring from the positive
x-axis, we come to a point on the circle corresponding to the angle θ. From this point,
we move a small distance ds along the circle. The distance ds corresponds to a small
angle dθ, so in radians,
(169) ds = r dθ.
Since the height is r sin(θ), the hyperbolic length of the arc is
(170)ds
y=
r dθ
r sin(θ)=
dθ
sin(θ).
These quantities are good approximations for small dθ and ds, but exact in the limit,
or in terms of infinitesimals, which I think is a good way to think about things like
this. Therefore, for an arc determined by running the angle θ from a to b, the length
of the corresponding hyperbolic line segment is
(171)
∫ b
a
dθ
sin θ.
Note that the radius of the circle is irrelevant. This integral is simple looking, but
probably not one of the ones you’ve got memorized. Here’s an integration formula,
(172)
∫dθ
sin θ= ln(csc θ − cot θ) + C.

8. COMPUTING AREA IN THE HYPERBOLIC PLANE 97
For the arc above, we would have
(173)
∫ 7π/12
5π/12
dθ
sin θ= ln(csc θ − cot θ)
∣∣∣∣7π/12
5π/12
= 0.52968449 . . .
Compare this to π6
= 0.52359877 . . ., which was the approximation we got before.
dxdy
y
Figure 6. A small rectangle in the half-plane model.
7.2. Exercises.
–1– We computed the hyperbolic length for a one-sixth segment at the top of the
half-circle. Compute the hyperbolic length of the one-sixth segment running
from θ = π12
to θ = 3π12
.
–2– Without actually doing the computation, what would be the hyperbolic
length for an arc starting at θ = 0?
8. Computing area in the hyperbolic plane
Consider a small rectangle in the half-plane model, as shown in Figure 6, and
suppose it has width dx and height dy. Since angles are preserved under the defor-
mation, the corresponding figure will be approximately a rectangle in the hyperbolic
plane. The sides will be slightly curved, but as dx and dy go to zero, the differences
will be negligible. If the rectangle is at height y in the half-plane model, the sides
of the corresponding almost-rectangle in the hyperbolic plane must be dxy
and dyy.
Multiplying gives an approximation of area that becomes exact in the limit. As with
distance, we must integrate to compute area, and the integral we need is
(174)
∫ ∫
R
dxdy
y2.

8. COMPUTING AREA IN THE HYPERBOLIC PLANE 98
r
θ
θ
θ
l m
n
inside
Figure 7. A doubly asymptotic triangle.
In Figure 7, we have three hyperbolic lines. One is represented by the half-circle,
and the other two by vertical lines.
The lines m and n intersect forming vertical angles measuring θ. The lines l and
n only intersect at the boundary, so they’re actually parallel in the hyperbolic plane.
The lines l and m are parallel as we see them lying in the half-plane model, and
since they do not intersect, they are also parallel as lines in the hyperbolic plane. In
the model, the distance between the two lines l and m is r + r cos θ. We’re used to
thinking of parallel lines as being a fixed distance apart all along them. That’s not
true in the hyperbolic plane. As we measure the horizontal distance between l and m,
the corresponding hyperbolic distance is obtained by dividing by the height y. That
is, the distance between the lines is
(175)r + cos θ
y,
and this distance goes to zero, as y goes to ∞. As you can see, it’s possible for two
parallel lines to approach each other asymptotically. This happens with l and n, as
well. This is one of the odd things that can happen in the hyperbolic plane. On the
other hand, maybe this isn’t so odd. Have you ever followed a pair of parallel lines
out to infinity? I haven’t.
Since the “upper ends” of l and m are as close as they can get without intersecting,
if we looked at them in the Poincare Disk, they would “intersect” on the boundary.
In fact, the pair l and m and the pair l and n look exactly the same in the hyperbolic
plane. We could even rotate the figure a bit to make these three lines look like Figure

8. COMPUTING AREA IN THE HYPERBOLIC PLANE 99
θ
θ
l
m
n
inside
Figure 8. Exactly the same doubly asymptotic triangle as in Figure
7, but rotated a bit.
8. Looking at Figure 8, I’ve positioned the word inside to indicate a triangular region
with curved edges. These edges are straight, however, in the hyperbolic plane, so it
makes sense to call this a triangle. On the other hand, two of the vertices are “at
infinity,” so we’ll call this a doubly asymptotic triangle. The doubly refers to the
two asymptotic vertices. The “ends” of the half-circles meet the boundary at right
angles, so the angle between l and m must be zero (assuming it makes sense to have
a vertex at infinity). The angle between l and n must also be zero. This gives us an
angle sum for this triange of
(176) 0 + 0 + θ = θ.
Hopefully, you answered the last question, zero. Now let us redirect our attention
to Figure 7. This doesn’t look like a triangle, but it’s easier to compute its area, and
we’ll see that the area is very important.
The interior of the triangle lies above the circle of radius r. For convenience, we’ll
assume the circle is centered at the origin. This doesn’t matter, since the x-axis in
this model, is exactly the same as the boundary circle in the Poincare Disk. The
origin can go anywhere.
The equation of the circle is y =√
r2 − x2. The equation of the line l is x = −r,
and the equation of the line m is x = r cos θ. (Don’t forget that r and θ are constants.)
The area of the doubly asymptotic triangle in Figure 7, therefore, is
(177) area =
∫ r cos θ
−r
∫ ∞
√r2−x2
dydx
y2.

8. COMPUTING AREA IN THE HYPERBOLIC PLANE 100
Here’s the mess, but it’s important.
area =
∫ r cos θ
−r
∫ ∞
√r2−x2
dydx
y2=
∫ r cos θ
−r
∫ ∞
√r2−x2
y−2 dydx
=
∫ r cos θ
−r
y−1
−1
∣∣∣∞√
r2−x2dx =
∫ r cos θ
−r
−1
y
∣∣∣∞√
r2−x2dx
=
∫ r cos θ
−r
1√r2 − x2
dx = − arccos(x
r
) ∣∣∣r cos θ
−r
= − arccos(cos θ) + arccos(−1)
= −θ + π
(178)
It’s downhill from here.
Note that the r was irrelevant. The important constant is the angle θ. We can
control this by moving the line m to the left or right. As we move the line m towards
x = r on the right, the values for θ tend towards zero, and the area increases. In fact,
the area tends towards
(179) area = −0 + π = π.
The triply asymptotic triangle at the limit has area π.
If m is the line x = 0, right in the middle, θ = π2. The area in this case is
(180) area = −π
2− π =
π
2.
On the other end, as we move m towards x = −r, θ tends towards π (a straight
angle). The area appears to go to zero, and this agrees with our area formula
(181) area = −π + π.
In any case, we have the following relationships for the areas of asymptotic trian-
gles.
Lemma 1. In hyperbolic geometry, a doubly asymptotic triangle has area π − α,
where α is the measure of the non-asymptotic angle.
Lemma 2. In hyperbolic geometry, a triply asymptotic triangle has area π.
9. AREA AND THE ANGLE SUM OF A TRIANGLE 101
9. Area and the angle sum of a triangle
The angle sum of a triangle is closely tied to Euclid’s Fifth Postulate/Euclid’s
Axiom. It’s important here as well, and in fact, it can be used to unify geometry as
we know it. Conquering the inhabited regions of geometry will come later. Now we’ll
invade the plains of hyperbolic geometry. Sorry. Let’s move on.
A
B
C
D
E
F
GH
I
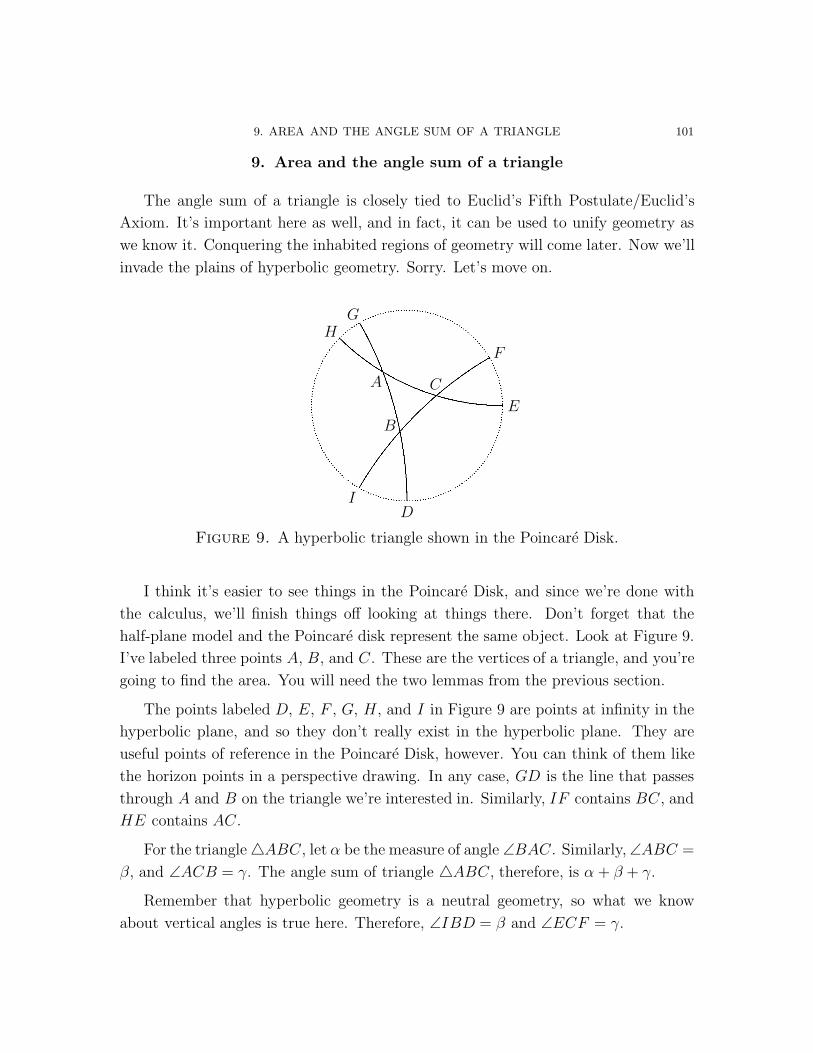
Figure 9. A hyperbolic triangle shown in the Poincare Disk.
I think it’s easier to see things in the Poincare Disk, and since we’re done with
the calculus, we’ll finish things off looking at things there. Don’t forget that the
half-plane model and the Poincare disk represent the same object. Look at Figure 9.
I’ve labeled three points A, B, and C. These are the vertices of a triangle, and you’re
going to find the area. You will need the two lemmas from the previous section.
The points labeled D, E, F , G, H, and I in Figure 9 are points at infinity in the
hyperbolic plane, and so they don’t really exist in the hyperbolic plane. They are
useful points of reference in the Poincare Disk, however. You can think of them like
the horizon points in a perspective drawing. In any case, GD is the line that passes
through A and B on the triangle we’re interested in. Similarly, IF contains BC, and
HE contains AC.
For the triangle 4ABC, let α be the measure of angle ∠BAC. Similarly, ∠ABC =
β, and ∠ACB = γ. The angle sum of triangle 4ABC, therefore, is α + β + γ.
Remember that hyperbolic geometry is a neutral geometry, so what we know
about vertical angles is true here. Therefore, ∠IBD = β and ∠ECF = γ.

9. AREA AND THE ANGLE SUM OF A TRIANGLE 102
So far, we know how to compute the areas of doubly and triply asymptotic trian-
gles, but we’re really interested in triangles that are not asymptotic at all, like our
triangle 4ABC. In order to use what we know, we need to introduce some asymptotic
triangles. One way to do this is shown in Figure 10.
A
B
C
D
E
F
GH
I
Figure 10. Some additional lines are added to Figure 9 form asymp-
totic triangles.
In Figure 10, 4ADE is a doubly asymptotic triangle. Therefore, its area is π−α.
Similarly, the area of the doubly asymptotic triangle ∆CHI is π − γ.
The area of doubly asymptotic triangle 4BID is π − β.
Looking closely at Figure 10, there is a quadruply asymptotic quadrilateral HEDI.
The area inside this quadrilateral is covered by the three areas of triangles 4ADE,
4CHI, and 4BID, except that triangle ∆ABC has been covered twice. If we knew
the area of quadrilateral HEDI, we’d have enough information to compute the area
of ∆ABC.
I’ve added one more line in Figure 11, and it divides quadrilateral HEDI into two
triply asymptotic triangles, each of which we know have area π. The area of HEDI
must be 2π.
OK. Our areas are related as follows.
HEDI = 4ADE + 4CHI + 4BID −4ABC(182)
2π = (π − α) + (π − γ) + (π − β)−4ABC.(183)
Therefore,
(184) 4ABC = π − (α + β + γ).

10. CONCLUSIONS 103
A
B
C
D
E
F
GH
I
Figure 11. With the new line IE, you can compute the area of quadri-
lateral HEDI.
We’ve just proved a really really important theorem in hyperbolic geometry.
Theorem 9. In hyperbolic geometry, if a triangle has angles α, β, and γ measured
in radians, then
(185) α + β + γ = π − area.
In other words, the angle sum of a triangle in hyperbolic geometry is π minus the area
of the triangle.
10. Conclusions
In hyperbolic geometry, the angle sum of a triangle is always less than 180◦. The
difference between the angle sum and 180◦ is called the triangle’s angle sum defect
or angle sum deficit. Expressed in radians, the angle sum defect is always equal to
the triangle’s area.
Since hyperbolic geometry is a neutral geometry, we can now see why it was
impossible to prove that the angle sum of a triangle is 180◦. Basically, because it’s
not necessarily true.
10.1. Exercises.
–1– Suppose I have a hyperbolic triangle and two of its angles measure π3
radians.
If the area of the triangle is π4, what is the measure of the third angle?

11. A MODEL FOR SPHERICAL/ELLIPTIC GEOMETRY 104
–2– Express Theorem 9 in degrees.
11. A model for spherical/elliptic geometry
In a typical modern geometry course, you would have finished about where we
are now, although you would have looked at Hilbert’s axiom system in a lot more
detail, of course. You might also have seen spherical geometry or elliptic geom-
etry at the end. Before we complete this part of the course with spherical/elliptic
geometry, let me give an overview of what we know.
Hilbert’s axiom system goes with Euclidean geometry. This is the same geometry
as the geometry of the xy-plane. Mathematicians have come to view Hilbert’s axioms
as a bunch of very obvious axioms plus one special one, Euclid’s Axiom. The special-
ness of Euclid’s Axiom is partly historical, but there are good mathematical reasons,
as well.
Euclid’s Axiom. Given a line l and a point P not on l, there is at most one
line through P that is parallel to l. (We could have said exactly one line parallel here)
Euclid’s Axiom in the context of neutral geometry is equivalent to the statement,
“The angle sum of a triangle is 180◦.” We’re going to embrace this alternative as
we move on. We can draw a picture of a triangle, but we can’t draw parallel lines
(showing the entire length of the lines). With parallel lines, the important stuff
happens (or doesn’t happen) outside of the picture, and we’ve kind of started to see
that what happens outside of the picture is not as obvious as we think. We’ll see this
more and more.
One big transition in the history of geometry occured when Gauss, Lobachevski,
and Bolyai realized that we could pull Euclid’s Axiom and replace it with something
like the hyperbolic axiom, and we would still have a consistent axiom system.
The Hyperbolic Axiom. Given a line l and a point P not on l, there are at
least two lines through P that are parallel to l. (There are actually two asymptotic
parallels and infinitely many more parallels in between.)
This axiom is equivalent to the statement, “The angle sum of a triangle is less
than 180◦.” In fact, and we’re going to run with this, the angle sum of a triangle (in
radians) plus the area of the triangle always equals π.

12. THE MODELS FOR ELLIPTIC GEOMETRY 105
In the context of these two parallel axioms, we have exactly one parallel in Eu-
clidean geometry and infinitely many parallels in hyperbolic geometry. There is a
third possibility that we have not yet considered. No parallels at all.
The Elliptic Axiom. Given a line l and a point P not on l, there are no lines
through P that are parallel to l. This can be stated more directly. There are no parallel
lines.
Now, we can’t just attach the elliptic axiom to neutral geometry, since we showed
that there are parallels in neutral geometry. It is possible, however, to make small
changes to the axioms of neutral geometry so that the resulting axiom system for
elliptic geometry is consistent. We won’t go there, however. One of the big prob-
lems with Hilbert’s axiom system is that we can’t easily move from one geometry to
another.
Here, we’ll look at two elliptic geometries. We’ll look at spherical geometry
mostly, and in passing, the elliptic geometry that goes with the elliptic axiom
system just mentioned. Each of these are sometimes called the geometry of Riemann,
but according to Bonola (page 147 in Non-Euclidean Geometry), it is not clear which
geometry Riemann actually had in mind. From Riemann’s point of view, in fact, they
are simply different spaces with the same geometry, so he may have actually been
talking about both.
12. The Models for Elliptic Geometry
Axioms will begin fade into the background for us now, and what a synthetic
geometer (i.e., an axiomatic geometer) might regard as only a model, we’ll embrace
as a geometric space. One of these spaces is the sphere, which consists of the points
that lie on the surface of the unit sphere,
(186) S ={
(x, y) ∈ R2 | x2 + y2 = 1}
.
Very important: When I say sphere, I will always mean the surface of the sphere. The
interior points may lie inside the sphere, but they are not part of the sphere. I will use
the word ball for the sphere plus the interior points. The lines in spherical geometry
are the great circles. Great circles are those circles on the sphere that have the
same radius as the sphere (in this case r = 1). They also divide the sphere exactly in
half. The equator is a great circle, and any circle passing through both the north

13. LINES IN SPHERICAL GEOMETRY 106
pole and south pole is a great circle. There are many more lines, of course. We
can immediately see how this cannot be a neutral geometry. Lines are not infinite in
length, although they can be continued indefinitely1. Also, every pair of great circles
intersects in two points2. The other elliptic geometry eliminates this conflict with
the Hilbert-like axioms. The projective plane is the same as the sphere, except
antipodal points are identified. Antipodal points are pairs of points on the sphere
that are exactly opposite each other (e.g., the north and south pole are antipodal
points). By identify, I mean that we think of the two antipodal points as being a
single point. With this identification, great circles now only intersect in a single point
just as lines intersect in Euclidean and hyperbolic geometry. The projective plane
is a really interesting space to visualize, but we won’t worry about that now. Just
remember that the projective plane is a weird space with the same local geometry as
the sphere, and it is a model for the synthetic elliptic geometry.
Note that the sphere is the actual object we’re interested in. In its geometry,
distances are measured along the surface directly, and angles are measured as they
appear. We can visualize spherical geometry in Euclidean space, because elliptic
geometry is in some sense smaller than Euclidean geometry. In fact, if we try to
squeeze the Euclidean plane onto the sphere, we’d have to make it really wrinkly.
Squeezing the hyperbolic plane down onto the Euclidean plane without deforming
distances would make it really wrinkly, as well.
13. Lines in spherical geometry
To get a feeling for spherical geometry, get a ball and put a rubber band around
the middle. It should look like the equator. If you have a world globe, it actually has
the equator marked on it. This is a great circle. The horizontal circles (the latitude
lines) are not great circles except for the equator. Note that they are all different
sizes. The longitude lines (which pass through the north and south poles) are great
circles. Given any great circle, you can roll the ball around so that it sits in the
equator’s position.
Any plane that passes through the center point of the sphere will intersect the
sphere in a great circle.
1Compare this to Euclid’s Second Postulate2Compare this to Euclid’s First Postulate

14. AREA ON THE SPHERE 107
13.1. Exercises.
–1– Given any three distinct points in xyz-space, how many planes contain all
three points? There are two cases.
–2– Given two points on the sphere, how many planes pass through these two
points and the center of the sphere? There are two cases.
–3– Given two points on the sphere, how many great circles contain both points?
There are two cases.
14. Area on the sphere
Recall that the area of a sphere is given by A = 4πr2, so the area of the unit
sphere is 4π. You should remember this number. It is very important.
Figure 12. Not a great picture, but try to see two great circles passing
through the north and south poles and intersecting at right angles.
Look at Figure 12. We have two great circles passing through the north and south
poles and intersecting at right angles. These great circles divide the sphere into four
equal slices called lunes. Since the total area is 4π, the area of each of these lunes
must be π. Note that each lune is bounded by segments of two great circles, which
are the lines in this geometry. Therefore, we could say that a lune is bounded by a
2-gon (in the sense that a triangle is a 3-gon). Furthermore, the angles on each of
these 2-gons is π2
(a right angle).

15. THE ANGLE SUM OF A TRIANGLE 108
Now consider three great circles through the north and south poles, which form
six equal angles at each pole. We have six lunes, each with area 4π6
= 2π3
. Each angle
from the bounding 2-gons measures 2π6
.
With four great circles and eight equal lunes, we get areas of π2
and angles π4.
In general, suppose we have a lune with angles equal to θ (for convenience, imagine
the vertices at the north and south poles). There are 2π radians around the north
pole, and θ occupies some portion of these. The area of the lune makes the same
proportion to the total area of the sphere. In other words,
(187)θ
2π=
area
4π,
and the area of a lune is
(188) area = 2θ.
α
β γ
Figure 13. Three great circles on the sphere forming a triangle. There
is an identical triangle on the other side.
15. The angle Sum of a triangle
As you might suspect, the angle sum of a triangle is not 180◦, nor is it π
radians. You may also suspect that the angle sum of a triangle in spherical geometry
is related to the triangle’s area. Look at the triangle shown in Figure 13. It has angles
measuring α, β, and γ. Note that there is an identical triangle on the other side. We
can find an equation relating the area and angle sum as follows.

15. THE ANGLE SUM OF A TRIANGLE 109
The angle sum of this triangle is α+β+γ. Since the sides appear to be bowed out,
we should expect this angle sum to be bigger than π radians or 180◦ (the opposite of
hyperbolic geometry).
The great circles in pairs form pairs of lunes. One pair has angles equal to α, one
pair has angles β, and the third pair has angles γ. These six lunes completely cover
the sphere, although there is some overlap. In particular, each pair of lunes cover
both copies of the triangle, so each triangle is covered three times. The rest of the
sphere is covered only once. Let’s let A be the area of each triangle. We now have
that the total area of the sphere is equal to the sum of the areas of the lunes, minus
the four extra coverings of the triangles. In other words,
(189) 4π = 2 · 2α + 2 · 2β + 2 · 2γ − 4A.
This simplifies to
(190) π = α + β + γ − A
and
(191) α + β + γ = π + A.
Theorem 10. In spherical geometry, (measured in radians) the angle sum of a
triangle minus its area is always equal to π.
This result should shock you. We’ve known since elementary school that the
angle sum of a triangle had something to do with 180◦, and when we learned
about radians, also something to do with π. Now, we see that in hyperbolic geometry
and in elliptic geometry, the difference between the angle sum of a triangle and π is
equal to the area of the triangle. In terms of synthetic geometry, we would think
that the three geometries were fundamentally different, and if anything, Euclidean
geometry and hyperbolic geometry were more closely related.
This relationship is a special case of something called the Gauss-Bonnet the-
orem. In its various forms, the Gauss-Bonnet theorem captures the essense of 2-
dimensional geometry in a way that the various forms of Euclid’s Fifth Postulate
could never do.

15. THE ANGLE SUM OF A TRIANGLE 110
15.1. Exercises.
–1– Draw a picture, as best you can, of two great circles through the north and
south poles that meet at right angles. Add the equator. You should get eight
triangles. What is the angle sum and area of each triangle. Does this agree
with Theorem 10?
–2– We have to measure the angles in radians to use theorem 10. What does it
say about angle sums in degrees? In other words,
(192) α + β + γ − what? = 180◦.