network-based modeling of coupled electro-mechanical systems€¦ · network-based modeling of...
TRANSCRIPT

Network-based Modeling ofCoupled Electro-Mechanical
Systems
L. ScholzTechnische Universität Berlin
ERC GrantModeling, Simulation and Controlof Multi-Physics Systems
MATHMOD 2012, Vienna, February 15th, 2012

Outline
1 Introduction2 Modeling of coupled electro-mechanical systems3 Remodeling and index analysis
Minimal extension for mechanical subsystemsMinimal extension for electrical subsystemsThe Index of the Coupled System
4 Numerical Example
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 2 / 24

Modeling of multi-physical Systems
. Modularized network-based modeling of multi-physics systems leads todifferential-algebraic equations (DAEs).
. In most simulation environments algebraic constraints are resolved toobtain a system in state space form.I application to large-scale systems not possible (or expensive)I complicated formulas with doubtful numerical propertiesI numerical solution deviates from constraints/interface conditions (e.g.
numerical damping or numerical dissipation).Regularization/remodeling techniques for large-scale high-index DAEs!L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 3 / 24

Outline
1 Introduction2 Modeling of coupled electro-mechanical systems3 Remodeling and index analysis
Minimal extension for mechanical subsystemsMinimal extension for electrical subsystemsThe Index of the Coupled System
4 Numerical Example
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 4 / 24

Mechanical subsystems
p = vM(p)v = f (t, p, v , u)− GT (p, u)λ
0 = g(p, u)(EoM)
. positions p ∈ Rnp , velocities v ∈ Rnp , holonomic constraintsg(p, u) ∈ Rnc , inputs u ∈ Rnu , f (t, p, v , u) applied forces, GT (p, u)λconstraint forces.
. The mass matrix M(p) is positive definite and the constraint matrixG (p, u) := ∂g(p,u)
∂p has full row rank.
Properties:. d-index 3 DAE. hidden constraints on velocity level: d
dt g(p, u) = 0
. hidden constraints on acceleration level: d2
dt2g(p, u) = 0. consistent initial values for p(t0), v(t0), λ(t0) are requiredL. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 5 / 24

Electrical Subsystems
ACddt qC (AT
C η, u, t) + AR r(ATR η, u, t) + ALıL + AV ıV + AI I s(u, t) = 0
ddtφL(ıL , u, t)− AT
L η = 0
ATV η −V s(u, t) = 0
. for lumped electrical circuit modeled via the Modified Nodal Analysis
. incidence matrix A = [AC AL AR AV AI ], node potentials η,branch voltages νT =
[νTC νTL νTR νTV νTI
], branch currents
ıT =[ıTC ıTL ıTR ıTV ıTI
].
. I s ,V s describe currents of current sources and voltages of voltagesources; r describes the resistance, qC describes the charges ofcapacitances, φL describes the fluxes of inductances.
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 6 / 24

The index of the MNA equations
Theorem (Estévez Schwarz & Tischendorf 2000)Assume that no loops of voltage sources/cutsets of current sources exists,all circuit elements are passive and controlled sources are not part ofCV-loops or LI-cutsets.1. If the circuit contains no voltage sources and every node is connected
with every other node via a capacitive path the DAE has d-index 0.2. If there are neither LI-cutsets nor CV-loops the DAE has d-index 1.
3. If there exist LI-cutsets or CV-loops the DAE has d-index 2.
. hidden constraints (in case of CV-loops or LI-cutsets)
0 = QTC R V
(AL
ddt ıL + AI
ddt I s(∗)
)0 = QT
V−C
(AT
V ,indddt η − d
dtV ind(t))
. The projectors QV−C and QCVR can be determined purely based ongraph theoretical algorithms.
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 7 / 24

Coupled Electro-Mechanical Systems
. Each subsystem Si with states xi ∈ Rni , inputs ui ∈ Rpi is given by
Fi(t, xi , xi , ui , ui) = 0
. coupling of subsystem Si with Sj1 , . . . ,Sjk via the condition
ui = Gi ,j1,...,jk (t, xj1 , . . . , xjk ),
. Fi and Gi ,j1,...,jk are assumed to be sufficiently smooth.
. We restrict to coupled systems consisting only of S1 and S2, andthe coupling is done via ui = Gi ,j(t, xj), i , j = 1, 2, i 6= j .
S1
S2
y1
u2
u1
y2
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 8 / 24

Outline
1 Introduction2 Modeling of coupled electro-mechanical systems3 Remodeling and index analysis
Minimal extension for mechanical subsystemsMinimal extension for electrical subsystemsThe Index of the Coupled System
4 Numerical Example
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 9 / 24

Remodeling of Coupled System
Coupling of subsystems can easily lead to large-scale high-index DAEs. numerical instabilities can occur. drift of numerical solution from constraint manifold. inaccuracies/order reduction of numerical methods, oscillations
Two-step remodeling procedure1. Each subcomponent is remodeled using index reduction by
minimal extensionI the special structure of the subsystem is incorporatedI in the resulting index 1 system all explicit and implicit constraints are
available (→ initialization easy, no drift of numerical solution)I the variables keep their physical meaning
2. The index of the coupled system constructed by coupling theequivalent index-1 formulations is analyzed.
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 10 / 24
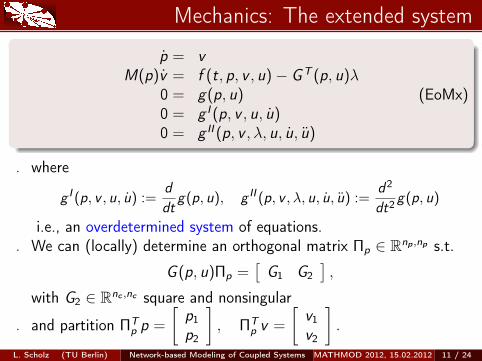
Mechanics: The extended system
p = vM(p)v = f (t, p, v , u)− GT (p, u)λ
0 = g(p, u)0 = g I (p, v , u, u)0 = g II (p, v , λ, u, u, u)
(EoMx)
. where
g I (p, v , u, u) :=ddt
g(p, u), g II (p, v , λ, u, u, u) :=d2
dt2g(p, u)
i.e., an overdetermined system of equations.. We can (locally) determine an orthogonal matrix Πp ∈ Rnp ,np s.t.
G (p, u)Πp =[G1 G2
],
with G2 ∈ Rnc ,nc square and nonsingular
. and partition ΠTp p =
[p1p2
], ΠT
p v =
[v1v2
].
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 11 / 24

Mechanics: Index-1 Formulation
Introducing new variables w1 for p2 and w2 for v2 gives
p1 = v1w1 = v2
M(p)Πp
[v1w2
]= f (t, p, v , u)− GT (p, u)λ
0 = g(p, u)0 = g I (p, v , u, u)0 = g II (p, v , λ, u, u, u)
(EoM1)
Properties:. d-index 1. no hidden constraints. no drift of the solution manifold. equivalent formulation, i.e. same solution for (p, v , λ).L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 12 / 24

Electrics: The extended system
0 = ACddtqC (AT
C η, t) + AR g(ATR η, t) + ALıL + AV ıV + AI I s(∗)
0 = ddtφL(ıL , t)− AT
L η
0 = ATV η −V s(∗)
0 = QTV−CA
TV ,ind
ddt η − QT
V−CddtV ind(t)
0 = QTC R VAL
ddt ıL + QT
C R VAIddt I s(∗)
For hidden constraints due to CV-loops:. Find transformation Πη (permutation!) such that
QTV−CA
TV ,indΠ−1
η = [F1 F2], F1 nonsingular.
. Partition and introducing the new variable
η = Πηη =
[η1η2
], η1 =
ddtη1
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 13 / 24

Electrics: The extended system
0 = AC C (.)ATC
ddt η + ACqC ,t + AR g(AT
R η, t) + ALıL + AV ıV + AI I s(∗)0 = L(.) d
dt ıL + φL,t − ATL η
0 = ATV η −V s(∗)
0 = QTV−CA
TV ,ind
ddt η − QT
V−CddtV ind(t)
0 = QTC R VAL
ddt ıL + QT
C R VAIddt I s(∗)
using C (.) := ∂qC∂νC
, qC,t(.) := ∂qC∂t , L(.) := ∂φL
∂ıL, φL,t(.) := ∂φL
∂t .
For hidden constraints due to CV-loops:. Find transformation Πη (permutation!) such that
QTV−CA
TV ,indΠ−1
η = [F1 F2], F1 nonsingular.
. Partition and introducing the new variable
η = Πηη =
[η1η2
], η1 =
ddtη1
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 13 / 24

Electrics: The extended system (2)
0 = AC C (.)ATC
[η1ddt η2
]+ ACqC,t(.) + AR g(.) + ALıL + AV ıV + AI I s(∗)
0 = L(ıL , t) ddt ıL + φL,t(ıL , t)− AT
L η
0 = ATV η −V s(∗)
0 = QTC R V AL
ddt ıL + QT
C R V AIddt I s(∗)
0 = F1η1 + F2 ddt η2 − QT
V−CddtV ind (t)
(with A∗ := ΠηA∗). Order the nodes and branches such that
QTC R VAL =
[AL 0 I
], QT
C R VAI =[AI ,ind 0
]. Using this splitting we can rewrite the hidden constraints as
0 = ALddtıL +
ddtıL + AI ,ind
ddt
I ind(t).
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 14 / 24

Electrics: Index-1 formulation
0 = AC C (.)ATC
[η1ddt η2
]+ ACqC,t(.) + AR g(.) + ALıL + AV ıV + AI I s(∗)
0 = L(.)
ddt ıLddt ıL
−ALddt ıL − AI ,ind
ddt I ind (t)
+ φL,t(.)− ATL η
0 = ATV η −V s(∗)
0 = F2 ddt η2 + F1η1 − QT
V−CddtV ind (t)
Properties:. d-index 1. no hidden constraints. no drift from the solution manifold. equivalent to MNA equations (i.e. same solution for η, ıL , ıV )
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 15 / 24

Index analysis for the coupled system. Consider the equivalent index-1 formulation of subsystem Si :
xi ,1 = k i1(t, xi ,1, xi ,2, ui )0 = k i2(t, xi ,1, xi ,2, ui , ui )
with∂k i2∂xi ,2
nonsingular,
. and the coupled system
X1 = K1(t,X1,X2),
0 = K2(t,X1,X2, X1, X2),(1)
with X1 =
[x1,1x2,1
], X2 =
[x1,2x2,2
]and
K1(.) =
[k11 (t, x1,1, x1,2,G1,2(t, x2,1, x2,2))k21 (t, x2,1, x2,2,G2,1(t, x1,1, x1,2))
],
K2(.) =
[k12 (t, x1,1, x1,2,G1,2(t, x2,1, x2,2), d
dtG1,2(t, x2,1, x2,2))
k22 (t, x2,1, x2,2,G2,1(t, x1,1, x1,2), ddtG2,1(t, x1,1, x1,2))
].
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 16 / 24

Index-1 condition
Theorem
. Then, the coupled system (1) is of d-index 0 (i.e. an ODE), iff
K2;X2=
[k12;x12
k12;x22
k22;x12k22;x22
]is nonsingular.
. If[K2;X1
K2;X2
]≡ 0, then the coupled system is of d-index 1, iff
K2;X2 =
[k12;x12
k12;x22
k22;x12k22;x22
]is nonsingular. (2)
. If no derivatives of inputs occur (2) is always fulfilled (coupling only viadifferential variables or no loops over algebraic variables)
. In general an increase of the index will occur if the input function isdifferentiated.
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 17 / 24
Outline
1 Introduction2 Modeling of coupled electro-mechanical systems3 Remodeling and index analysis
Minimal extension for mechanical subsystemsMinimal extension for electrical subsystemsThe Index of the Coupled System
4 Numerical Example
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 18 / 24

Numerical Example - The Dynamo
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 19 / 24

Numerical Example - The Dynamo
x = vy = w
mv = − sin(α)λ− cos(α)Fw (ϕ, ı)mw = −mg − cos(α)λ+ sin(α)Fw (ϕ, ı)
0 = sin(α)x + cos(α)y
C η = −Gη − ı0 = η − Vs(t, ϕ, ϕ)
ϕ(v)ı
d-index 3
d-index 2
The coupled system has d-index 4!
Fz Fg
Fw
F
α
h l
b
m
+
+
−−
+
GC
Vs
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 20 / 24

Numerical Example - The Dynamo
x = vy = w
mv = − sin(α)λ− cos(α)Fw (ϕ, ı)mw = −mg − cos(α)λ+ sin(α)Fw (ϕ, ı)
0 = sin(α)x + cos(α)y
C η = −Gη − ı0 = η − Vs(t, ϕ, ϕ)
ϕ(x)ı
d-index 3
d-index 2
The coupled system has d-index 3!
Fz Fg
Fw
F
α
h l
b
m
+
+
−−
+
GC
Vs
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 20 / 24

Numerical Example - The Dynamo
z1 = vy = w
mz2 = − sin(α)λ− cos(α)Fw (ϕ, ı)mw = −mg − cos(α)λ+ sin(α)Fw (ϕ, ı)
0 = sin(α)x + cos(α)y0 = sin(α)v + cos(α)w0 = sin(α)z2 + cos(α)w
Cz3 = −Gη − ı0 = η − Vs(t, ϕ, ϕ)
0 = z3 − ddtVs(t, ϕ, ϕ)
ϕ(x)ı
d-index 1
d-index 1
The coupled system has d-index 1!
Fz Fg
Fw
F
α
h l
b
m
+
+
−−
+
GC
Vs
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 20 / 24
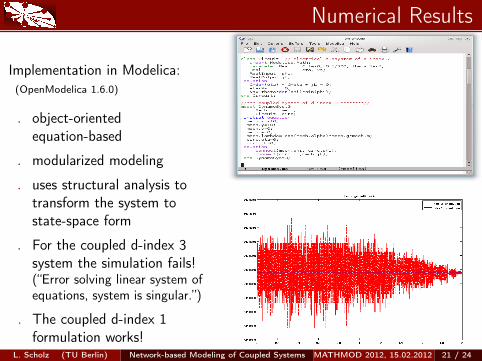
Numerical Results
Implementation in Modelica:(OpenModelica 1.6.0)
. object-orientedequation-based
. modularized modeling
. uses structural analysis totransform the system tostate-space form
. For the coupled d-index 3system the simulation fails!(“Error solving linear system ofequations, system is singular.”)
. The coupled d-index 1formulation works!
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 21 / 24

Conclusion
. If the coupled system is of d-index 1 numerical solution is fine.
. If increase of the index due to coupling occurs remodeling isrequired.
. If each subsystem is of d-index 1 a remodeling based on thetopological structure of the interconnection network might bepossible (open question).
. Redundant or inconsistent equations can be created by thecoupling resulting in non-regular systems.
. The coupling of various subsystems can result in arbitraryhigh-index DAEs and a throughout analysis is still open.
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 22 / 24

Thank you for your attention!
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 23 / 24

References
S. Bächle.Numerical Solution of Differential-Algebraic Systems Arising in Circuit Simulation.PhD thesis, Institut für Mathematik, Technische Universität Berlin, 2007.
E. Eich-Soellner and C. Führer.Numerical Methods in Multibody Dynamics.B.G. Teubner, Stuttgart, 1998.
D. Estévez-Schwarz and C. Tischendorf.Structural analysis of electric circuits and consequences for MNA.Int. J. Circuit Theory Appl., 2000, 28(2): 131-162.
M. Günther and U. Feldmann.CAD-based electric-circuit modeling in industry, I. Mathematical structure and index ofnetwork equations.Surv. Math. Ind., 1999, 8:97-129.
P. Kunkel and V. Mehrmann.Index reduction for differential-algebraic equations by minimal extension.Zeitschrift für Angewandte Mathematik und Mechanik, 2004, 84:579-597.
P. Kunkel and V. Mehrmann.Differential-Algebraic Equations — Analysis and Numerical Solution.EMS Publishing House, Zürich, Switzerland, 2006.
L. Scholz (TU Berlin) Network-based Modeling of Coupled Systems MATHMOD 2012, 15.02.2012 24 / 24