n° : année 2013 École doctorale ed-494 jean-henri … · iii remerciements ce travail a été...
TRANSCRIPT

N° : Année 2013
École Doctorale ED-494 Jean-Henri Lambert Université de Haute Alsace (UHA)
Laboratoire de Physique et Mécanique Textiles (LPMT)
THÈSE
Présentée pour obtenir le grade de
Docteur de L’Université De Haute Alsace
Discipline : Mécanique
Par
HADJ LATROCH
CONTRIBUTION AU DÉVELOPPEMENT DE NOUVEAUX
OUTILS DE CARACTÉRISATION MÉCANIQUE DES ÉTOFFES :
Contribution à l’étude et à la caractérisation de la signature
sonore du frottement des étoffes.
Membre du Jury:
Prof. Margarita Neznakomova Technical University, Sofia. Rapporteur
Dr. Daniel Dupont (HDR) HEI, Lille Rapporteur
Dr. Véronique Zimpfer ISL, Saint-Louis. Examinatrice
Dr. Emilie Drean. ENSISA, Mulhouse Examinatrice
Prof. Laurence Schacher ENSISA, Mulhouse Directeur de thèse
Prof. Dominique Adolphe ENSISA, Mulhouse Directeur de thèse

II

III
REMERCIEMENTS
Ce travail a été effectué au sein du Laboratoire de Physique et Mécanique Textiles de
Mulhouse. Je remercie son directeur, durant ma période de thèse, M. Jean-Yves Drean et
tous les membres du LPMT pour leur accueil.
J’exprime toute ma reconnaissance à mes directeurs de thèse, Mme Laurence Schacher, et
M. Dominique Adolphe pour leur encadrement, leur disponibilité et leurs conseils tout au long
de cette étude.
Je voudrais remercier les rapporteurs de cette thèse Mme Margarita Neznakomova,
Professeur des Universités à la Technical University Sofia, et M. Daniel Dupont, HDR,
responsable du pôle matériaux à HEI.
Je remercie également Mme Véronique Zimpfer et Mme Emilie Drean pour leurs aides
et leurs conseils.
Je remercie bien-sûr tous mes collègues et l’ensemble des personnes que j’ai connu tout au
long de ces trois années que j’ai passé au sein du laboratoire pour leur immense soutien moral
dont ils ont fait preuve.
Que toutes les personnes qui m’ont un jour aidé ou conseillé soient aussi remerciées.

IV
SOMMAIRE
REMERCIEMENTS ............................................................................................................III
Liste des figures : .................................................................................................................. X
Liste des tableaux ............................................................................................................... XX
Glossaire ......................................................................................................................... XXIII
INTRODUCTION GÉNÉRALE ...........................................................................................1
1. Introduction ........................................................................................................................1
CHAPITRE 1 GÉNÉRALITÉS SUR LE TEXTILE ET LE PHÉNOMÈNE DE
FROTTEMENT .....................................................................................................................4
1. Généralités sur les étoffes textiles ......................................................................................5
1.1. La fibre .........................................................................................................................5
1.2. Le fil .............................................................................................................................6
1.3. L’étoffe textile ..............................................................................................................7
1.3.1 Les étoffes tissées ...................................................................................................7
1.3.2 Les étoffes tricotées ................................................................................................9
1.3.3 Les non-tissés .........................................................................................................9
2. Partie analyse métrologique des étoffes ...........................................................................10
2.1. Identification de la matière ........................................................................................10
2.2. Détermination de la masse linéique du fil ..................................................................13

V
2.2.1 Système d’unité directe (titrage) : ........................................................................13
2.2.2 Système d’unités indirect (ou système de numérotage) .......................................14
2.3. Mesure de la torsion du fil .........................................................................................14
2.4. Nombre de fils par cm ................................................................................................14
2.5. Détermination de la masse surfacique du tissu ..........................................................15
2.6. Détermination de l’armure du tissu ............................................................................15
3. Le phénomène du frottement ...........................................................................................15
3.1. Introduction ................................................................................................................15
3.2. Les forces de frottement .............................................................................................16
3.3. Frottement statique .....................................................................................................16
3.4. Coefficient de frottement ...........................................................................................17
3.5. Le phénomène du bruit engendré par le frottement ...................................................18
3.6. Instabilité de frottement .............................................................................................21
3.7. Bruit de frottement .....................................................................................................21
3.8. Caractérisation d’un frottement .................................................................................22
3.8.1 La pression acoustique .........................................................................................22
3.8.2 Le spectre de fréquence ........................................................................................23
3.9. Frottement des matériaux souples ..............................................................................25
3.10. Frottement des textiles .............................................................................................26
3.11. Mesure de frottement par la chaîne d’évaluation Kawabata ....................................27
3.12. Bruit de frottement des matériaux souples ...............................................................28

VI
4. Conclusion ........................................................................................................................31
CHAPITRE 2 IDENTIFICATION DES PARAMÈTRES DE FROTTEMENT ................33
1. Introduction ......................................................................................................................34
2. La marche .........................................................................................................................35
2.1. Mouvement du bras pendant la marche .....................................................................35
3. Partie expérimentale .........................................................................................................36
3.1. Les marqueurs ............................................................................................................36
3.2. Protocole expérimental ..............................................................................................37
3.2.1 La vitesse du frottement .......................................................................................38
3.2.2 Schéma du trajet du mouvement du bras ..............................................................39
3.3. Calcul de la surface de frottement ..............................................................................41
3.4. Identification de la pression de frottement .................................................................47
3.4.1 Choix du capteur ..................................................................................................47
3.4.2 Choix du mode de fixation ...................................................................................48
3.4.3 Comparaison entre les deux types de montages du capteur .................................48
3.4.4 Choix de l’emplacement de la fixation du capteur ...............................................49
3.4.5 L’étalonnage .........................................................................................................50
3.4.6 Les masses correspondant aux pressions de frottement .......................................51
4. Conclusion ........................................................................................................................52
CHAPITRE 3 CONCEPTION ET RÉALISATION DE L’INSTRUMENT ..................53
1. Introduction ......................................................................................................................54

VII
2. Conception de l'instrument expérimental .........................................................................55
2.1. Calcul de l'angle de balayage .....................................................................................56
2.2. Calcul de la largeur de balayage de l'axe (O'O") .......................................................57
2.3. Calcul de l'angle de balayage de l'axe (O"O') ............................................................58
2.4. Calcul des dimensions des porte-échantillons ...........................................................58
2.4.1 Porte-échantillon immobile ..................................................................................58
2.4.2 Porte échantillon mobile .......................................................................................59
2.5. Calcul du positionnement des axes du mécanisme ....................................................63
3. Description fonctionnelle de système expérimental ........................................................65
3.1. Description générale ..................................................................................................65
3.2. Description de la partie mécanique ............................................................................66
3.3. Description de la partie enregistrement .....................................................................66
3.4. Présentation de la partie mécanique ...........................................................................68
3.5. Fabrication des composantes mécanique ...................................................................68
4. Étalonnage ........................................................................................................................75
5. L'enceinte acoustique .......................................................................................................78
5.1. Première enceinte acoustique .....................................................................................79
5.1.1 Calcul théorique de la résonance de l’enceinte acoustique ..................................80
5.2. Deuxième enceinte acoustique ...................................................................................82
5.3. Atténuation de l’enceinte acoustique .........................................................................84
6. Instrument expérimental ...................................................................................................85
VIII
7. Conclusion ........................................................................................................................87
CHAPITRE 4 EXPÉRIMENTATIONS ..............................................................................88
1. Introduction ......................................................................................................................89
2. Protocole expérimental .....................................................................................................91
2.1. Échantillons textiles ...................................................................................................91
2.2. Instrument expérimental ............................................................................................91
3. Essais expérimentaux .......................................................................................................92
4. Essais avec tissus ..............................................................................................................94
4.1. Échantillon (T1) en coton / élasthanne ......................................................................94
4.1.1 Essais de frottement pour la surface S1 ................................................................94
4.1.2 Essais de frottement pour la surface S2 ................................................................99
4.2. Échantillon en Polyamide/Polyuréthane (T2) ..........................................................105
4.2.1 Essais de frottement pour la surface S1 ..............................................................105
4.2.2 Essais de frottement pour la surface S2 ..............................................................110
4.3. Échantillon en Soie (T3) .........................................................................................116
4.3.1 Essais de frottement pour la surface S1 ..............................................................116
4.3.2 Essais de frottement pour la surface S2 ..............................................................121
5. Conclusion ......................................................................................................................128
CHAPITRE 5 CONCLUSION ET PERSPECTIVES .......................................................129
1. Conclusion ......................................................................................................................130
2. Perspectives ....................................................................................................................134

IX
RÉFÉRENCES BIBLIOGRAPHIQUES ...........................................................................136
CHAPITRE 6 ANNEXES .................................................................................................141
ANNEXE 1 ........................................................................................................................145
ANNEXE 2 ........................................................................................................................158
ANNEXE 3 ........................................................................................................................177
ANNEXE 4 ........................................................................................................................180

X
Liste des figures :
Figure 1.1 : Fibres de : a) Coton b) Laine c) Cachemire d) Soie. ............................................6
Figure 1.2 : Fil simple obtenu par torsion des fibres. ....................................................................7
Figure 1.3 : a) Tissu. b) Tricot. c) Non-tissé. ................................................................................7
Figure 1.4 : Les trois principales armures. a) Toile. b) Sergé. c) Satin. ........................................8
Figure 1.5 : a) Mailles cueillies. b) Mailles jetées.........................................................................9
Figure 1.6 : Sens de torsion d’un fil. a) Torsion type « S ». b) Torsion type « Z » ..................14
Figure 1.7 : Deux solides A et B en contacta) Sans force tangentielle. b) Avec une force
tangentielle. .................................................................................................................................16
Figure 1.8 : Deux solides A et B en glissement (a), (b) et (c) montre la croissance de l’angle ɵ
.....................................................................................................................................................17
Figure 1.9 : Interfaces multicontacts. ..........................................................................................19
Figure 1.10 : Classification du bruit de frottement selon la sévérité du contact. ........................20
Figure 1.11 : L’empreinte acoustique de la peau humaine selon l’âge des personnes. ...............22
Figure 1.12 : a) Essai manuel de frottement. b) Enceinte anéchoïque. ......................................23
Figure 1.13 : Dispositif expérimental « Tribonoise » Topographie 3D de surface .....................24
Figure 1.14 : Dispositif d’évaluation de surface fibreuse. ..........................................................26
Figure 1.15 : KES-FB4 Module de Surface de la chaîne Kawabata ...........................................27
Figure 1.16 : Instrument de frottement des fibres et des tissus. ..................................................29
Figure 1.17 : Générateur de son en frottement ............................................................................30
Figure 1.18 : Essai de frottement manuel du tissu. .....................................................................31

XI
Figure 2.1 : Inscription chronophotographique du mouvement par Marey[64] ..........................34
Figure 2.2 : Plans anatomiques du corps humain. .......................................................................35
Figure 2.3 : Placement des marqueurs sur le bras. ......................................................................37
Figure 2.4 : Enregistrement vidéo du mouvement. .....................................................................38
Figure 2.5: Séquences de film : mouvement du bras. (a) Marche. b) Jogging. c) Course. .........39
Figure 2.6 : Trajectoires du mouvement du bras. a) Marche. b) Jogging. c) Course. .................40
Figure 2.7 : Peinture appliquée sous l’avant-bras du sujet. .........................................................42
Figure 2.8 : Empreintes de peintures sur le vêtement. ................................................................42
Figure 2.9 : Empreinte de frottement lors d’un jogging. (a) Avant le traitement. (b) Après le
traitement. ....................................................................................................................................43
Figure 2.10 : Surfaces de frottement en mode marche ................................................................44
Figure 2.11 : Surfaces de frottement en mode jogging. ..............................................................44
Figure 2.12 : Surfaces de frottement en mode course. ................................................................45
Figure 2.13 : Largeur maximale de l’empreinte de frottement sous le bras ................................46
Figure 2.14 : Empreinte des surfaces de frottements du bras. .....................................................46
Figure 2.15 : Comparaison de la conductance du capteur selon le mode de fixation. ................48
Figure 2.16 : Collage d’un capteur de pression. ..........................................................................49
Figure 2.17 : Courbe d’étalonnage du capteur ............................................................................50
Figure 3.1 : Supports échantillons mobile et fixe. .......................................................................54
Figure 3.2 : Présentation cinématique du mouvement de l'emporte-pièce mobile. .....................56

XII
Figure 3.3 : Porte- échantillon mobile .........................................................................................57
Figure 3.4 : Porte-échantillon immobile. 1. Plaque de silicone. 2. Bague de serrage. 3. Support
en bois. ........................................................................................................................................59
Figure 3.5 : Porte-échantillons. ...................................................................................................59
Figure 3.6: Surface S' du frottement de l'axe du porte-échantillon (P) ......................................60
Figure 3.7 : Porte-échantillon mobile ..........................................................................................63
Figure 3. 8 : Schéma cinématique du mécanisme de mouvement mécanique. ...........................64
Figure 3.9 : Diagramme de la structure générale de l'instrument expérimental ..........................65
Figure 3.10 : Diagramme de la structure mécanique de l'instrument expérimental ....................66
Figure 3.11 : Diagramme de la structure d'enregistrement de l'instrument expérimental. ..........67
Figure 3. 12 : Plateau en aluminium ...........................................................................................69
Figure 3. 13 : Disque en aluminium ............................................................................................70
Figure 3. 14 : Disque support du porte échantillon mobile. ........................................................71
Figure 3. 15 : Première partie mécanique....................................................................................72
Figure 3. 16 : Partie mécanique améliorée. .................................................................................73
Figure 3. 17 : Moteur électrique ..................................................................................................74
Figure 3. 18 : Nombre de tour du moteur en fonction de la tension ...........................................75
Figure 3. 19 : Mouvement de l'emporte pièce. (a) marqueur. (B) Déplacement. ........................76
Figure 3. 20 : Mouvement de la porte pièce. (a) correspond (2,58 volt), (b) correspond (2,68
volt). ............................................................................................................................................76
Figure 3.21 : Graphe d'étalonnage...............................................................................................78

XIII
Figure 3.22 : Enceinte acoustique ...............................................................................................79
Figure 3.23 : Enceinte acoustique avec isolation.1-premier compartiment.2-deuxième
compartiment ...............................................................................................................................80
Figure 3. 24 : Enceinte acoustique. .............................................................................................83
Figure 3.25 : Atténuation des deux enceintes développées .........................................................85
Figure 3. 26 : Instrument expérimental développé ......................................................................86
Figure 4.1 : Illustration du seuil du bruit. ....................................................................................90
Figure 4.2 : L’échelle du bruit selon la perception de l’oreille humaine. ...................................90
Figure 4.3 : Spectre du bruit de fond pour la vitesse V1 en [dB] et en [dB(A)]. .......................92
Figure 4.4 : Spectre du bruit de fond pour la vitesse V2 en [dB] et en [dB(A)]. .....................92
Figure 4.5 : Spectre du bruit de fond pour la vitesse V3 en [dB] et en [dB(A)]. .......................93
Figure 4.6 : Spectre sonore pour le tissu Coton / Élasthanne pour la vitesse V1 en [dB] et en
[dB(A)]. .......................................................................................................................................94
Figure 4. 7 : Spectre sonore pour le tissu Coton / Élasthanne pour la vitesse V2 en [dB] et en
[dB(A)]. .......................................................................................................................................95
Figure 4.8 : Spectre sonore pour le tissu Coton / Élasthanne pour la vitesse V3 en [dB] et en
[dB(A)]. .......................................................................................................................................95
Figure 4.9 : Niveau acoustique total du tissu coton / élasthanne pour les trois vitesses et la
surface S1. ...................................................................................................................................96
Figure 4.10 : Spectre sonore pour le tissu coton / élasthanne et bruit de fond pour la vitesse V1
en [dB] et en [dB(A)] et la surface S1. ........................................................................................97

XIV
Figure 4.11 : Spectre sonore pour le tissu coton / élasthanne et bruit de fond pour la vitesse V2
en [dB] et en [dB(A)] et la surface S1. ........................................................................................97
Figure 4.12 : Spectre sonore pour le tissu coton / élasthanne et bruit de fond pour la vitesse V3
en [dB] et en [dBA] et la surface S1. ..........................................................................................98
Figure 4.13 : Spectre sonore du tissu coton / élasthanne pour les trois vitesses en [dB] et une
surface S1. ...................................................................................................................................98
Figure 4.14 : Spectre sonore du tissu coton / élasthanne pour les trois vitesses en [dB(A)] et
une surface S1. ............................................................................................................................99
Figure 4.15 : Spectre sonore pour le tissu coton / élasthanne pour la vitesse V1 en [dB] et en
[dB(A)] et la surface S2...............................................................................................................99
Figure 4.16 : Spectre sonore pour le tissu coton / élasthanne pour la vitesse V2 en [dB] et en
[dB(A)] et la surface S2.............................................................................................................100
Figure 4.17 : Spectre sonore pour le tissu coton / élasthanne pour la vitesse V3 en [dB].
[dB(A)] et la surface S2.............................................................................................................100
Figure 4.18 : Niveau acoustique total du Tissu coton / élasthanne pour les trois vitesses. .......101
Figure 4.19 : Spectre sonore pour le tissu coton / élasthanne avec le bruit de fond pour la
vitesse V1 en [dB]. [dB(A)] et la surface S2. ............................................................................102
Figure 4.20 : Spectre sonore pour le tissu coton / élasthanne avec le bruit de fond pour la
vitesse V2 en [dB]. [dB(A)] et la surface S2. ............................................................................102
Figure 4.21 : Spectre sonore pour le tissu coton / élasthanne avec le bruit de fond pour la
vitesse V3 en [dB]. [dB(A)] et la surface S2. ............................................................................103
Figure 4.22 : Spectre sonore du tissu coton / élasthanne pour les trois vitesses en [dB(A)] et
une surface S2. ..........................................................................................................................103
Figure 4.23 : Spectre sonore du tissu coton / élasthanne pour les trois vitesses en [dB(A)] et une
surface S2. .................................................................................................................................104

XV
Figure 4.24 : Empreinte acoustique du tissu Coton/Élasthanne. ...............................................104
Figure 4.25 : Spectre sonore pour le tissu Polyamide/Polyuréthane pour la vitesse V1 en [dB] et
en [dB(A)] et une surface S1. ....................................................................................................105
Figure 4.26 : Spectre sonore pour le tissu Polyamide/Polyuréthane pour la vitesse V2 en [dB] et
en [dB(A)] une surface S1. ........................................................................................................106
Figure 4.27 : Spectre sonore pour le tissu Polyamide/Polyuréthane pour la vitesse V3 en [dB] et
en [dB(A)] une surface S1. ........................................................................................................106
Figure 4.28 : Niveau acoustique total du Tissu Polyamide/Polyuréthane (T2) selon les 3
vitesses et la surface S1. ............................................................................................................107
Figure 4.29 : Spectre sonore pour le tissu Polyamide/Polyuréthane et le bruit de fond pour V1
en [dB] et en [dB(A)] et la surface S1 .......................................................................................108
Figure 4.30 : Spectre sonore pour le tissu Polyamide/Polyuréthane et le bruit de fond pour V2
en [dB] et en [dB(A)] et la surface S1. ......................................................................................108
Figure 4.31 : Spectre sonore pour le tissu Polyamide/Polyuréthane et le bruit de fond pour V3
en [dB] et en [dBA] et la surface S1. ........................................................................................109
Figure 4.32 : Spectre sonore pour le tissu coton / élasthanne trois vitesses en [dB(A)] et la
surface S1. .................................................................................................................................109
Figure 4.33 : Spectre sonore pour le tissu Polyamide/Polyuréthane (T2) des trois vitesses en
[dB] et en [dB(A)] et de la surface S1. ......................................................................................110
Figure 4.34 : Spectre sonore pour le tissu polyamide/polyuréthane pour V1 en [dB] et en [dBA]
...................................................................................................................................................110
Figure 4.35 : Spectre sonore pour le tissu polyamide/polyuréthane pour V2 en [dB] et en
[dB(A)]. .....................................................................................................................................111
Figure 4.36 : Spectre sonore pour le tissu polyamide/polyuréthane pour V3 en [dB] et en
[dB(A)]. .....................................................................................................................................111

XVI
Figure 4.37 : Niveau acoustique total du tissu polyamide/polyuréthane pour les trois vitesses et
la surface S2. .............................................................................................................................112
Figure 4.38 : Spectre sonore pour le tissu polyamide/polyuréthane et le bruit de fond pour V1
en [dB] et en [dB(A)] et la surface S2. ......................................................................................113
Figure 4.39 : Spectre sonore pour le tissu polyamide/polyuréthane et le bruit de fond pour V2
en [dB] et en [dB(A)] et la surface S2. ......................................................................................113
Figure 4.40 : Spectre sonore pour le tissu Polyamide/Polyuréthane et le bruit de fond pour V3
en [dB] et en [dB(A)] et la surface S2. ......................................................................................114
Figure 4.41 : Spectre sonore pour le tissu Polyamide/Polyuréthane (T2) des trois vitesses en
[dB] et en [dB(A)] et de la surface S2. ......................................................................................114
Figure 4.42 : Spectre sonore pour le tissu Polyamide/Polyuréthane (T2) des trois vitesses en
[dB] et en [dB(A)] et de la surface S2. ......................................................................................115
Figure 4.43 : Empreinte acoustique du tissu polyamide/polyuréthane .....................................115
Figure 4.44 : Spectre sonore pour le tissu en Soie pour V1 en [dB] et en [dB(A)] et la surface
S1. ..............................................................................................................................................116
Figure 4.45 : Spectre sonore pour le tissu en Soie pour V2 en [dB] et en [dB(A)] et la surface
S1. ..............................................................................................................................................116
Figure 4.46 : Spectre sonore pour le tissu en Soie pour V3 en [dB]. [dB(A)] et la surface S1.
...................................................................................................................................................117
Figure 4.47 : Niveau acoustique total du tissu en Soie. ............................................................118
Figure 4.48 : Spectre sonore pour le tissu Soie et le bruit de fond pour V1 en [dB] et en
[dB(A)] et de la surface S1. .......................................................................................................118
Figure 4.49 : Spectre sonore pour le tissu Soie et le bruit de fond pour V2 en [dB] et en
[dB(A)] et de la surface S1. .......................................................................................................119

XVII
Figure 4.50 : Spectre sonore pour le tissu Soie et le bruit de fond pour V3 en [dB] et en
[dB(A)] et pour la surface S1. ...................................................................................................119
Figure 4.51 : Spectre sonore pour le tissu Polyamide/Polyuréthane (T2) des trois vitesses en
[dB] et en [dB(A)] et de la surface S1. ......................................................................................120
Figure 4.52 : Spectre sonore pour le tissu Polyamide/Polyuréthane (T2) des trois vitesses en
[dB] et en [dB(A)] et de la surface S1. ......................................................................................120
Figure 4.53 : Spectre sonore pour le tissu Soie pour V1 en [dB] et en [dB(A)] et la surface S2
...................................................................................................................................................121
Figure 4.54 : Spectre sonore pour le tissu Soie pour V2 en [dB] et en [dB(A)] et la surface S2
...................................................................................................................................................121
Figure 4.55 : Spectre sonore pour le tissu Soie pour V3 en [dB] et en [dB(A)] et la surface S2.
...................................................................................................................................................122
Figure 4.56 : Niveau acoustique total du tissu en Soie pour les trois vitesses et la surface S2.123
Figure 4.57 : Spectre sonore pour le tissu et le bruit de fond pour V1 en [dB] et en [dB(A)] et
la surface S2. .............................................................................................................................123
Figure 4.58 : Spectre sonore pour le tissu et le bruit de fond pour V2 en [dB] et en [dB(A)] et
la surface S2. .............................................................................................................................124
Figure 4.59 : Spectre sonore pour le tissu et le bruit de fond pour V3 en [dB] et en [dB(A)] et
la surface S2. .............................................................................................................................124
Figure 4.60 : Spectre sonore pour le tissu en Soie (T3) des trois vitesses en [dB] et en [dB(A)]
et de la surface S2. .....................................................................................................................125
Figure 4.61 : Spectre sonore pour le tissu en Soie (T3) des trois vitesses en [dB] et en [dB(A)]
et de la surface S2. .....................................................................................................................125
Figure 4.62 : Empreinte acoustique du tissu en Soie. ...............................................................126
Figure 4.63 : Niveau acoustique total des trois Tissus pour S1. ...............................................127

XVIII
Figure 4.64 : Niveau acoustique total des trois Tissus pour S2. ...............................................127
Figure 6.1 : Spectre sonore pour le tissu T4 en polyester pour V2 et surface S1en [dB] et en
[dB(A)]. .....................................................................................................................................146
Figure 6.2 : Spectre sonore pour le tissu T4 et le bruit de fond pour V2 et surface S1 en [dB] et
en [dB(A)]. ................................................................................................................................146
Figure 6.3 : Spectre sonore pour le tissu T5 en Laine pour V2 et surface S1 en [dB] et en
[dB(A)]. .....................................................................................................................................147
Figure 6.4 : Spectre sonore pour le tissu T5et le bruit de fond pour V2 et surface S1 en [dB] et
en [dB(A)]. ................................................................................................................................147
Figure 6.5 : Spectre sonore pour le tissu T6 en viscose / élasthanne pour V2 et surface S1 en
[dB] et en [dB(A)]. ....................................................................................................................148
Figure 6.6 : Spectre sonore pour le tissu T6 et le bruit de fond pour V2 et surface S1 en [dB] et
en [dB(A)]. ................................................................................................................................148
Figure 6.7 : Spectre sonore pour le tissu T7 en coton / polyester pour V2 et surface S1 en [dB]
et en [dB(A)]. ............................................................................................................................149
Figure 6.8 : Spectre sonore pour le tissu T7et le bruit de fond pour V2 et surface S1 en [dB] et
en [dB(A)]. ................................................................................................................................149
Figure 6.9 : Spectre sonore pour le tissu T8 en coton pour V2 et surface S1 en [dB] et en
[dB(A)]. .....................................................................................................................................150
Figure 6.10 : Spectre sonore pour le tissu T8 et le bruit de fond pour V2 et surface S1 en [dB]
et en [dB(A)] .............................................................................................................................150
Figure 6.11 : Spectre sonore pour le tissu T9 en coton pour V2 et surface S1 en [dB] et en
[dB(A)]. .....................................................................................................................................151
Figure 6.12 : Spectre sonore pour le tissu T9 et le bruit de fond pour V2 et surface S1 en [dB]
et en [dB(A)]. ............................................................................................................................151

XIX
Figure 6.13 : Spectre sonore pour le tissu T10 en coton pour V2 et surface S1 en [dB] et en
[dB(A)]. .....................................................................................................................................152
Figure 6.14 : Spectre sonore pour le tissu T10 et le bruit de fond pour V2 et surface S1 en [dB]
et en [dB(A)]. ............................................................................................................................152
Figure 6.15 : Spectre sonore pour le tissu T11 en coton pour V2 et surface S1 en [dB] et en
[dB(A)]. .....................................................................................................................................153
Figure 6.16 : Spectre sonore pour le tissu T11 et le bruit de fond pour V2 et surface S1 en [dB]
et en [dB(A)]. ............................................................................................................................153
Figure 6.17 : Spectre sonore pour le tissu T12 en coton pour V2 et surface S1 en [dB] et en
[dB(A)]. .....................................................................................................................................154
Figure 6.18 : Spectre sonore pour le tissu T12 et le bruit de fond pour V2 et surface S1 en [dB]
et en [dB(A)]. ............................................................................................................................154
Figure 6.19 : Spectre sonore pour le tissu T13 en polyester pour V2 et surface S1 en [dB] et en
[dB(A)]. .....................................................................................................................................155
Figure 6.20 : Spectre sonore pour le tissu T13 et le bruit de fond pour V2 et surface S1 en [dB]
et en [dB(A)]. ............................................................................................................................155
Figure 6.21 : Spectre sonore pour le tissu T14 en polyester pour V2 et surface S1 en [dB] et en
[dB(A)]. .....................................................................................................................................156
Figure 6.22 : Spectre sonore pour le tissu T14 et le bruit de fond pour V2 et surface S1 en [dB]
et en [dB(A)]. ............................................................................................................................156
Figure 6.23 : Spectre sonore pour le tissu T15 en polyester pour V2 et surface S1 en [dB] et en
[dB(A)]. .....................................................................................................................................157
Figure 6.24 : Spectre sonore pour le tissu T15 et le bruit de fond pour V2 et surface S1 en [dB]
et en [dB(A)] .............................................................................................................................157

XX
Liste des tableaux
Tableau 1.1: Classification des matières textiles...........................................................................5
Tableau 1.2: Comportement de matières textiles à la chaleur et à la combustion ..................... 11
Tableau 1.3: Caractères morphologiques de quelques matières textiles .................................... 12
Tableau 1.4: Solubilités de quelques fibres textiles dans les solvants usuels. ........................... 13
Tableau 2.1 : Longueur des trajectoires du balancement du bras. ............................................. 40
Tableau 2.2 : Temps parcourus obtenus à partir des séquences du film de mouvement du bras.
.................................................................................................................................................... 41
Tableau 2.3 : Vitesses du mouvement du bras. .......................................................................... 41
Tableau 2.4 : Surfaces de frottements. ....................................................................................... 45
Tableau 2.5 : Comparaison de la conductance du montage de capteur. ..................................... 49
Tableau 2.6 : Tension moyenne ................................................................................................. 51
Tableau 2.7: La masse correspondante à chaque type du mouvement.
Tableau 2.8: La pression correspondante à chaque type du mouvement. ................................. 52
Tableau 3.1 : Dimensions de l'emporte pièce mobile selon les surfaces de frottement ............. 63
Tableau 3. 2 : Temps du mouvement du porte échantillon pour une distance de 0,122 m ........ 77
Tableau 3. 3 : Vitesse linéaire du mouvement du porte échantillon .......................................... 77
Tableau 3.4 : Voltages correspondant aux vitesses du mouvement. .......................................... 78
Tableau 3. 5 : Dimensions des deux compartiments de l’enceinte acoustique. ......................... 80

XXI
Tableau 3. 6 : Classement des fréquences. ................................................................................. 81
Tableau 3. 7 : Fréquences propres du compartiment (1) ............................................................ 81
Tableau 3. 8 : Fréquences propres du compartiment (2) ............................................................ 82
Tableau 3.9 : Dimensions de la deuxième enceinte acoustique. ................................................ 83
Tableau 3.10 : Fréquences propres de l'enceinte acoustique. ..................................................... 84
Tableau 4.1 : Identification des facteurs .................................................................................... 91
Tableau 4.2 : Récapitulatif du niveau global du bruit de fond. .................................................. 93
Tableau 4.3 : Caractéristiques techniques du tissu T1 (coton / élasthanne) ............................... 94
Tableau 4.4 : Paramètres acoustiques du tissu selon les trois vitesses et la surface S1. ........... 96
Tableau 4.5 : Niveau sonore maximum et sa fréquence............................................................. 96
Tableau 4.6 : Paramètres acoustiques du tissu selon les trois vitesses et la surface S2. .......... 101
Tableau 4.7 : Niveau sonore maximum et sa fréquence........................................................... 101
Tableau 4.8 : Caractéristiques techniques du tissu (Polyamide/Polyuréthane). ...................... 105
Tableau 4.9 : Paramètres Acoustiques du tissu Polyamide/Polyuréthane ................................ 107
Tableau 4.10 : Niveau sonore maximum et sa fréquence......................................................... 107
Tableau 4.11 : Paramètres acoustiques du tissu polyamide/polyuréthane selon les trois vitesses
et la surface S2. ........................................................................................................................ 112
Tableau 4.12 : Niveau sonore maximum et sa fréquence......................................................... 112
Tableau 4.13 : Caractéristiques techniques du tissu (Soie). .................................................... 116

XXII
Tableau 4.14 : Paramètres acoustiques du tissu en Soie pour les trois vitesses et la surface S1.
.................................................................................................................................................. 117
Tableau 4.15 : Niveau sonore maximum et sa fréquence......................................................... 117
Tableau 4.16 : Paramètres Acoustiques du tissu en Soie. ........................................................ 122
Tableau 4.17 : Niveau sonore maximum et sa fréquence......................................................... 122
Tableau 4.18 : Pressions Acoustiques des trois tissus pour S1. ............................................... 126
Tableau 4.19 : Pressions Acoustiques des trois tissus pour S2. ............................................... 126
Tableau 6.1 : Caractéristiques techniques du tissu T4 (polyester) ........................................... 146
Tableau 6.2 : Caractéristiques techniques du tissu T5 (Laine)................................................. 147
Tableau 6.3 : Caractéristiques techniques du tissu T6 (viscose / élasthanne) .......................... 148
Tableau 6.4 : Caractéristiques techniques du tissu T7 (coton / polyester) ............................... 149
Tableau 6.5 : Caractéristiques techniques du tissu T8 (coton) ................................................. 150
Tableau 6.6 : Caractéristiques techniques du tissu T9 (coton) ................................................. 151
Tableau 6.7 : Caractéristiques techniques du tissu T10 (coton) ............................................... 152
Tableau 6.8 : Caractéristiques techniques du tissu T11 (coton) ............................................... 153
Tableau 6.9 : Caractéristiques techniques du tissu T12 (coton) ............................................... 154
Tableau 6.10 : Caractéristiques techniques du tissu T14 (polyester) ....................................... 156
Tableau 6.11 : Caractéristiques techniques du tissu T15 (polyamide) ..................................... 157

XXIII
Glossaire
1Acoustique l'étude du son et des vibrations acoustiques, relative à leurs
émissions, propagations et effets. Ce terme se réfère également à la
façon dont le son est perçu dans des environnements spécifiques.
2Armure ordre d’entrecroisement des fils.
3 Bande de tiers
d'octave bande d'octave qui est découpée en trois bandes de manière
logarithmique. Ces bandes sont plus fines et permettent une analyse
plus détaillée d'un phénomène sonore.
4 Bel c’est une unité logarithmique où une différence de 1 bel correspond à
un rapport de 10 en puissance. On utilise plus couramment son sous-
multiple le décibel (dB) 1 Bel = 10 Décibels.
5 Bruit ambiant niveau sonore incluant l’ensemble des bruits environnants. Dans le
cas d’une gêne liée à une source sonore particulière, le bruit ambiant
est la somme du bruit résiduel et du bruit particulier émis par la
source. Il est composé de l'ensemble des bruits émis par toutes les
sources proches et éloignées.
6 Bruit de fond (dB) le bruit de fond est le bruit total existant en un point pendant une
certaine durée. Il contient l'ensemble des sons émis par les sources
sonores qui influent au point de mesure : les conversations, les bruits
de ventilation, les bruits de machines ou d'équipements, les sons
provenant des couloirs, des autres pièces ou des bruits de circulation,
etc.
7 Bruit rose un bruit rose est un bruit normalisé ayant un spectre dont le niveau est
le même sur toutes les bandes d’octaves.
8 Bruit oscillations et ondes mécaniques d'un milieu élastique, surtout dans la
gamme de fréquence de l'ouïe humaine avec des fréquences de
vibration comprises entre 16 – 20 000 Hertz (Hz).

XXIV
9 Chaîne nappe de fils disposée dans le sens longitudinal d’un tissu.
10
Champ diffus le champ est diffus, (généralement on se trouve alors dans des locaux
et non à l'extérieur), lorsque la pression acoustique est constante, ou
suffisamment constante dans tous les points du local, ou du champ.
11
Colonne succession de maille dans le sens de la longueur du tricot.
12
dB (A) valeur en décibels à laquelle on applique une correction en fonction
de la fréquence considérée pour tenir compte de la sensibilité de
l’oreille humaine.
13
dB cette échelle logarithmique a été créée pour faciliter notre
appréhension du niveau sonore en réduisant les ordres de grandeur.
on ne peut pas ajouter arithmétiquement des valeurs en décibel les
unes aux autres car ce sont des grandeurs logarithmiques.
La sensation auditive n'est pas linéaire mais varie de façon
logarithmique. On distingue le décibel linéaire -dB lin- des décibels
en mesure pondérée. Une pondération est nécessaire pour tenir
compte de la courbe de sensibilité de l'oreille en fonction de la
fréquence.
14
Ennoblissement
ensemble des opérations donnant à certains produits textiles leurs
qualités finales.
15 Étoffe désigne les surfaces textiles destinées à usage d’habillement ou
d’ameublement.
16 Fibre élément de matière textile de longueur réduite utilisé pour filature ou
pour les non-tissés.
17 Filature à friction
système de filature dans lequel la torsion est donnée au fil par
enroulement le long de l'axe longitudinal dans la ligne de contact
entre deux surfaces rotatives.

XXV
18 Filature à jet d’air
un système de filage dans laquelle le fil est réalisé par enroulement de
fibres autour d'un courant de base de fibres avec de l'air comprimé.
19 Filature Open End filature à fibres libérées. Système de filature basée sur le concept
d'application de la torsion au fil sans la rotation de la masse de fil,
dans une turbine qui tourne à très haute vitesse.
20 Fréquence (f) la fréquence est une mesure du nombre de vibrations par seconde.
Établie en Hz (hertz). Plus la valeur est basse, plus le son est grave.
Plus la valeur est haute, plus le son est aigu. Les sons audibles
s'étendent pour l'homme entre 20 et 20000 Hz.
21 Isolation phonique
mesures destinées à réduire la transmission du bruit entre la source
sonore et le destinataire. Lorsque la source sonore et le destinataire se
trouvent dans différentes pièces, on parle d'isolation phonique. Si la
source sonore et le destinataire se trouvent dans la même pièce, on
parle d'absorption du bruit. En matière d’isolation phonique, on fait
une distinction entre les bruits aériens et les bruits d’impact.
22 Maille cueillie tricot trame formé par le bouclage d'un seul fil sur toutes les aiguilles
d’une même rangés ; se détricote facilement.
23 Maille jetée tricot chaîne formé par le bouclage d’un fil sur chaque aiguille ; ne se
démaille pas.
24 Maille
élément constitutif d’un tricot.
25
Niveau de pression
acoustique (dB) Les variations de pression provoquées par les ondes sonores de l'air
sont appelées pression acoustique. Elles sont évaluées en dB (deciBel).
Le niveau de pression acoustique le plus bas pouvant être entendu est
0 dB.
XXVI
26 Niveau sonore le niveau sonore est indiqué selon la courbe de pondération exprimée
en unités dB(A), dB(B) ou dB(C). Les courbes de pondération A, B et
C sont normalisée selon la norme internationale IEC 651.
27 Non-tissé
est un produit manufacturé fait d’un voile ou d’une nappe de fibres
individuelles, orientées directement ou au hasard, liées par friction,
cohésion ou adhésion.
28 plan frontal plan vertical perpendiculaire au plan sagittal qui divise le corps en
deux parties symétriques, antérieure (ventrale) et postérieure (dorsale)
29 plan sagittal plan vertical qui passe par la ligne médiane du corps et le divise en
deux parties symétriques, droites et gauches.
30 plan horizontal plan horizontal, parallèle au sol, qui divise le corps en deux parties
symétriques, supérieure (du côté de la tête) et inférieure (du côté des
pieds).
31 Pondérés pondération A ou C et D. L'oreille répond aux fréquences de manière
non linéaire : certaines tonalités sont plus facilement perçues que
d'autres. C’est pour cela que des filtres sont appliqués aux niveaux
sonores : ils modifient la réponse fréquentielle. La pondération
fréquentielle "A" est prévue pour approcher la façon dont les oreilles
entendent les sons. Le symbole pour le décibel pondéré A est dB(A).
32 Réverbération phénomène qui se traduit par une prolongation de l'existence d'un son
due aux réflexions multiples sur les parois d'une salle.
33 Salle anéchoïque ou
salle sourde pièce spécialement traitée acoustiquement pour que ses parois ne
réfléchissent pas les ondes sonores et pour éliminer les bruits et les
vibrations de l'extérieur.

XXVII
34 Son deux définitions existent pour ce terme. Physiquement, un son est
formé par des variations de pression, indépendamment de toute
fréquence, qui se propagent dans un support élastique, tel que l'air.
D'un point de vue perceptif, un son est la réponse humaine à ces
variations de pression, qui surviennent dans la plage de fréquence
généralement reconnue de 20 Hz à 20 kHz.
35 Spectre de bruit c'est un graphique sur lequel apparaissent les niveaux sonores de
chaque bande de fréquences, de la plus grave à la plus aigue
acoustique. Ces mesures sont généralement faites dans des bandes de
fréquence de largeur finie. On distingue ainsi les spectres par bandes
d'octave, ou tiers d'octave.
36 Tachymètre
instrument de mesure mécanique permettant de déterminer le
nombre de tour des rotations des machines.
37 Tissage ensemble des opérations consistant à entrecroiser des fils pour
réaliser des tissus.
38 Tissu surface souple formée par l’entrecroisement perpendiculaire des fils
de chaine et de trame sur un métier à tisser.
39 Trame ensemble de fils perpendiculaires à la chaine.
40 Tricot étoffe formée par l’entrelacement de boucles de fil.
INTRODUCTION
GÉNÉRALE

Introduction Générale
1
1. Introduction
L’évolution des industries du textile et de l’habillement est parvenue à proposer aux
consommateurs une diversité de tissus38
possédant des propriétés et des caractéristiques
techniques très larges. La réalisation de ces produits fut rendue possible grâce aux
développements et aux progrès des techniques de filature, de tissage37
et d’ennoblissement14
.
Cette diversité engendra la nécessité de développer de nouvelles méthodes métrologiques
pour mieux analyser les propriétés des étoffes15
. Elles se fixèrent pour objectif d’améliorer
leurs qualités et de satisfaire aux exigences des consommateurs.
Dans cette perspective, les industriels et les scientifiques développèrent des outils
d’analyse et d’évaluation sensorielle afin de mieux caractériser leurs produits [1][2].
La norme ISO 5492 définit l’analyse sensorielle comme étant « l’examen des propriétés
organoleptiques d’un produit par les organes des sens » [3]. Ces caractéristiques figurent à
part entière dans les cahiers des charges et dans les procès-verbaux d'analyse de contrôle de la
qualité. Cette approche d’analyse sensorielle appliquée aux produits textiles resta néanmoins
majoritairement basée sur l’étude du toucher des étoffes [4]. Cette approche est décrite dans
les travaux de Philippe [5] et de Ben Saïd [6].
Ces dernières années, les chercheurs entreprirent donc de travailler sur l’évaluation
sensorielle du toucher, de la vue et de l’odeur. Le son34
a, quant à lui, rarement été pris en
compte à l’exception de quelques travaux que l’on peut relever sur l’ouïe [7][8][9][10]. Ces
recherches sont basées sur l’étude du bruit8 qui peut être généré et entendu lors du frottement
de matériaux rigides tels que les métaux ou, dans le cas des textiles, de matériaux souples
comme la soie et le polyester.
Le frottement a largement été étudié dans l’industrie textile en tant que phénomène
responsable de l’usure des étoffes. Il peut aussi être l’une des causes qui affecteront le confort
d’un article d’habillement en raison du bruit qu’il pourra générer. De nombreux systèmes
permettent actuellement, avec plus au moins de finesse, de mesurer ces sons et donc le bruit.
Ces systèmes furent initialement développés pour réaliser des mesures dans les domaines du
génie civil, de la mécanique, du transport, et du secteur médical [11] [12].

Introduction générale
2
Voici les questions qui pourront se poser dans le cadre de notre étude :
— Pourrions-nous adapter ces moyens d’acquisition et de traitement au domaine du
textile ?
— Serait-il possible de développer une nouvelle méthode de caractérisation mécanique
des étoffes grâce au son généré par les frictions de type textile contre textile ?
— Quel instrument expérimental devrions-nous développer pour tester au mieux les
échantillons textiles ?
— Quelle méthode pourrait alors être appliquée pour nous permettre d’évaluer le confort
acoustique d’un article destiné à l’industrie de l’habillement ?
Dans ce travail de recherche, nous avons donc étudié le phénomène physique du
frottement de plusieurs tissus sur eux-mêmes, et leurs caractéristiques acoustiques. Nous
avons pour cela observé le frottement réel des vêtements portés par un individu durant ses
activités sportives : marche, jogging, course.
Nous nous sommes ensuite intéressés à la friction du haut du corps et plus
particulièrement au mouvement de l’avant-bras sur le haut du tronc avec : la trajectoire de
l’avant-bras, la surface frottée, la pression du frottement et les vitesses du balancement de
l’avant-bras en situation de marche, de jogging et de course. Ces paramètres nous ont aidé à
développer un dispositif expérimental d’essais afin de reproduire le frottement des étoffes
entre elles. Il nous permettra de générer des bruits de frottement reproductibles dans des
conditions proches de la réalité.
À partir des bruits enregistrés, nous désirions, en fait, identifier les signatures acoustiques
du frottement. Cette connaissance de la signature permettra de limiter (dans le cadre des
vêtements « furtifs ») ou au contraire de reproduire (bruit de la soie avec une matière en
polyester) cette caractéristique.
Nous présenterons, à travers ce document, l’ensemble des travaux que nous avons
effectués pour aboutir à la conception de ce dispositif expérimental de génération et d’analyse
du son obtenu par la friction des tissus et par l’obtention de leurs empreintes acoustiques.

Introduction générale
3
Dans le premier chapitre, nous présenterons des généralités sur les étoffes textiles ainsi
que sur les frottements de surfaces des matériaux rigides et leurs bruits. Nous expliquerons
alors ce que sont les matériaux fibreux16
souples et les caractéristiques des sons générés par
friction.
Dans le deuxième chapitre, nous établirons les premières étapes de l’étude du mouvement
de l’avant-bras humain, et les protocoles d’essais que nous avons développés. Nous y
détaillerons la détermination des paramètres qui influent sur la génération du son issu du
frottement des vêtements portés par un individu lors de la marche.
Le troisième chapitre décrira la conception de l’instrument expérimental et de ses trois
modules constitutifs. Le premier module correspond à un système mécanique de simulation
du mouvement de l’avant-bras humain, le deuxième est une enceinte acoustique comprenant
le microphone, et le troisième s’applique à la chaîne d’enregistrement et au traitement du son.
Le quatrième chapitre exposera les résultats du frottement que nous avons obtenus
expérimentalement sur notre dispositif. Les résultats seront analysés afin de pouvoir relier
l’empreinte acoustique avec la nature et la contexture des étoffes testées.
Ce document s’achèvera par une conclusion générale. Elle portera sur le travail réalisé et
sur ses perspectives envisageables.

4
CHAPITRE 1 GÉNÉRALITÉS SUR LE TEXTILE
ET LE PHÉNOMÈNE DE
FROTTEMENT

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
5
1. Généralités sur les étoffes textiles
Les étoffes textiles sont considérées comme des matériaux souples fibreux, qui sont
obtenus par différents procédés industriels à base de fibres. La fibre textile est une entité
élémentaire qui sert à l’élaboration d’un fil que l’on utilisera pour fabriquer une étoffe. La fibre
ainsi que le fil sont des textiles linéaires alors que l’étoffe est considérée comme un textile
surfacique.
1.1. La fibre
La fibre textile est caractérisée par une finesse, une forme très allongée par rapport à son
épaisseur et une certaine flexibilité. Les fibres sont classées en trois catégories [13][14] :
— les fibres naturelles (animales ou végétales) ;
— les fibres chimiques artificielles (issues de la cellulose du bois) ;
— les fibres chimiques synthétiques (issues de la chimie du pétrole).
Le tableau 1.1 présente une classification des matières textiles les plus usuelles selon leur
origine.
Tableau 1.1 : Classification des matières textiles
Origine de la matière Exemple
Fibre naturelle Origine
végétale
Coton, lin, chanvre, jute.
Origine animale Laine, mohair, cachemire, soie.
Origine
minérale
Verre.
Fibre
chimique
Origine
artificielle
Viscose, acétate, triacétate.
Origine
synthétique
Polyamide, Polyester, acrylique.
La longueur, la finesse et la régularité des fibres sont des facteurs essentiels pour la qualité
des fils et des textiles obtenus et qui influent sur leur aspect et leurs propriétés. Les fibres et les
filaments correspondent à l’échelle microscopique. Elles mesurent entre 1 µm et 0,1 mm en
diamètre.
La figure 1.1 présente quelques exemples de fibres observées au microscope électronique à
Balayage (MEB) [15].

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
6
Figure 1.1 : Fibres de : a) Coton b) Laine c) Cachemire d) Soie.
1.2. Le fil
Le fil est obtenu par procédé de filature. Plusieurs méthodes sont utilisées dans l’industrie
textile. Les plus usuelles pour la fabrication des fils à partir des fibres courtes, moyennes ou
longues sont :
— filature à anneau curseur ;
— filature Open End19
;
— filature à jet d’air18
;
— filature à friction17
.
La cohésion des fibres est assurée par le frottement inter fibres. Après avoir été démêlées,
ces dernières sont orientées et leur masse fibreuse est affinée.
La figure 1.2 montre un fil simple obtenu par procédé à anneau curseur [16].

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
7
Figure 1.2 : Fil simple obtenu par torsion des fibres.
1.3. L’étoffe textile
Une étoffe est une surface souple de fils (textile bidimensionnel) obtenue à partir d’un ou
de plusieurs fils ou des fibres assemblés selon différents processus : entrecroisement (tissus),
entre-bouclages (tricots40
), enchevêtrement (non-tissés27
). (Figure 1.3) [16].
Figure 1.3 : a) Tissu. b) Tricot. c) Non-tissé.
1.3.1 Les étoffes tissées
Un tissu est formé de fils disposés en deux faisceaux perpendiculaires qui vont
s’entrecroiser pour représenter un motif appelé armure2. Ce mode d’entrecroisement donne des
(a) (b) (c)

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
8
propriétés mécaniques différentes selon l’armure et la contexture. On définira celles-ci selon
l’usage final de l’étoffe.
Les deux faisceaux de fils (la chaîne9 et la trame
39). À partir des armures de base, il est
possible de développer des armures dérivées. Trois exemples d’armures : la toile, le sergé et le
satin sont présentées par la Figure1.4.
a) La toile
La toile est l’armure la plus simple. Elle est caractérisée par la disposition inverse des fils
pairs et impairs (Figure 1.4 a).
b) Le sergé
Cette armure est caractérisée par des côtes de sillons obliques par rapport à la ligne droite
de la lisière (Figure 1.4 b).
c) Le satin
Selon la prise du fil de chaîne et le fil de trame, on trouve deux types d’armure satin : le
satin régulier et le satin irrégulier (Figure 1.4 c).
.
Figure 1.4 : Les trois principales armures. a) Toile. b) Sergé. c) Satin.
(a) (b) (c)

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
9
1.3.2 Les étoffes tricotées
L’étoffe tricotée est formée de boucles de fils, appelées mailles24
, qui s’entre-bouclent entre
elles pour constituer le tricot. Dans un tricot, on distingue les rangées et les colonnes11
de
mailles [17]. On appelle « rangée » une série de mailles disposées côte à côte. Une colonne est
une série de mailles entre-bouclées les unes dans les autres.
On classe les mailles en deux types selon leur procédé d’obtention : les tricots à mailles
cueillies22
et les tricots à mailles jetées23
(Figure 1.5) [18]. Le tricot à mailles cueillies est
caractérisé par des mailles formées qui sont issues d’un même fil et qui sont tricotées dans le
sens des rangées. Certains sous-vêtements, les pull-overs, et les chaussettes sont en tricot à
mailles cueillies. Le tricot à mailles jetées nécessite l’utilisation simultanée de plusieurs fils.
Ces tricots ont la particularité d’être souvent indémaillables. Ils sont notamment utilisés pour
fabriquer des maillots de bain, certains revêtements de sièges automobile, et certaines prothèses
vasculaires.
Figure 1.5 : a) Mailles cueillies. b) Mailles jetées.
1.3.3 Les non-tissés
Les non-tissés sont formés à partir de fibres ou de filaments. Le principe est simple, il
consiste à consolider un voile de fibres ou de filaments par différentes méthodes. Les méthodes
de consolidation sont basées sur un entrelacement des fibres par procédé mécanique
(aiguilletage ou jet d’eau), par procédé chimique ou par procédé thermique. Selon la définition
de la norme internationale ISO 9092 [19] « les non-tissés sont des fibres orientées de manière
aléatoire ou directionnelle, et transformées sous forme de voile ou de format, consolidées et

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
10
liées par friction, ou cohésion ou adhésion ». Ils sont souvent utilisés dans des produits à usage
unique comme les produits hygiéniques : lingette, couches bébé, et dans d’autres domaines :
médicaux, géotextiles…
2. Partie analyse métrologique des étoffes
Une étoffe textile est généralement analysée dans un laboratoire de métrologie en
respectant des conditions précises : température de 20 °C ± 2 °C et humidité de 65 HR % ±
4 %, en application de la norme internationale ISO 139 : 2005. L’étoffe est conditionnée au
minimum durant 24 heures avant les essais proprement dits [20].
Les analyses métrologiques fondamentales qui caractérisent et distinguent les étoffes entre
elles sont les suivantes :
— identification de la matière ;
— détermination de l’embuvage et du retrait ;
— détermination de la masse linéique du fil ;
— mesure de la torsion du fil ;
— détermination du nombre de fils par cm, dans les deux directions principales
(chaîne/trame pour le tissu, rangée/colonne pour le tricot) ;
— détermination de la masse surfacique du tissu ;
— détermination de l’armure du tissu.
2.1. Identification de la matière
L’identification de la matière textile est obtenue par plusieurs méthodes. Parmi les plus
utilisées, nous citons ce qui suit :
Par combustion
Les fibres textiles ont différents comportements à la chaleur. La combustion permet de les
situer dans un groupe bien défini selon la réaction de la fibre à l’approche de la flamme, dans la
Chapitre 1 : Généralités sur le textile et le phénomène de frottement
11
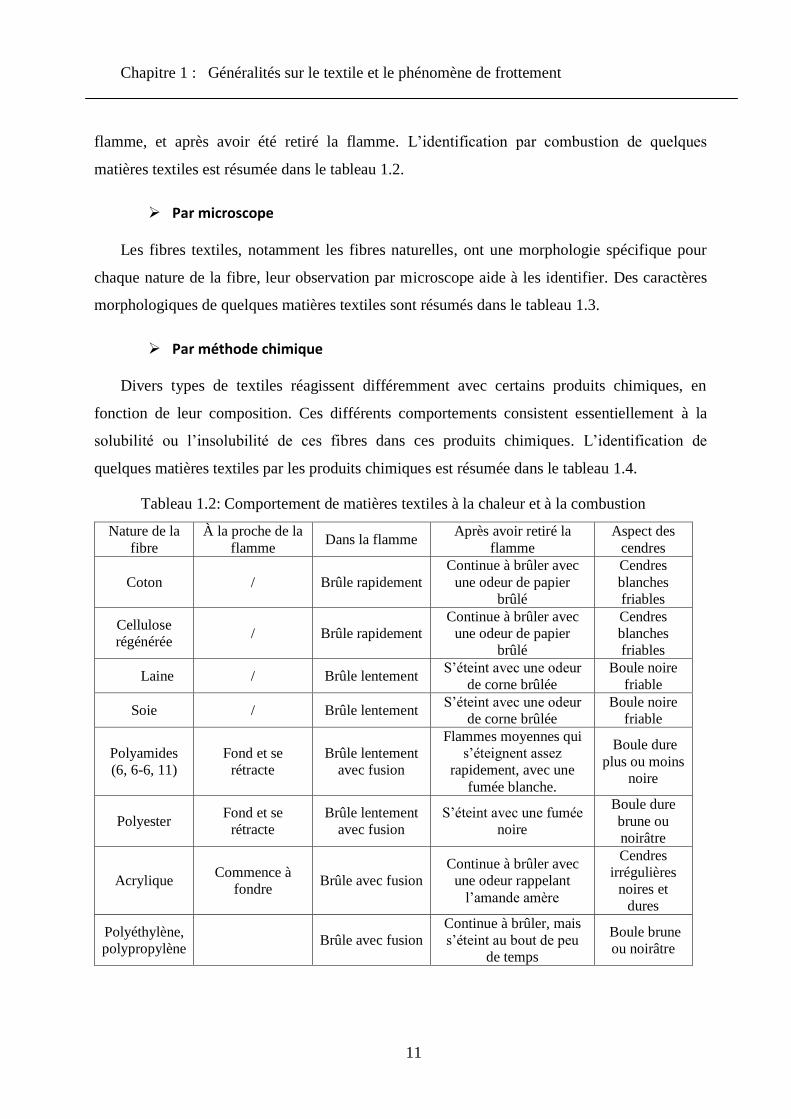
flamme, et après avoir été retiré la flamme. L’identification par combustion de quelques
matières textiles est résumée dans le tableau 1.2.
Par microscope
Les fibres textiles, notamment les fibres naturelles, ont une morphologie spécifique pour
chaque nature de la fibre, leur observation par microscope aide à les identifier. Des caractères
morphologiques de quelques matières textiles sont résumés dans le tableau 1.3.
Par méthode chimique
Divers types de textiles réagissent différemment avec certains produits chimiques, en
fonction de leur composition. Ces différents comportements consistent essentiellement à la
solubilité ou l’insolubilité de ces fibres dans ces produits chimiques. L’identification de
quelques matières textiles par les produits chimiques est résumée dans le tableau 1.4.
Tableau 1.2: Comportement de matières textiles à la chaleur et à la combustion
Nature de la
fibre
À la proche de la
flamme Dans la flamme
Après avoir retiré la
flamme
Aspect des
cendres
Coton / Brûle rapidement
Continue à brûler avec
une odeur de papier
brûlé
Cendres
blanches
friables
Cellulose
régénérée / Brûle rapidement
Continue à brûler avec
une odeur de papier
brûlé
Cendres
blanches
friables
Laine / Brûle lentement S’éteint avec une odeur
de corne brûlée
Boule noire
friable
Soie / Brûle lentement S’éteint avec une odeur
de corne brûlée
Boule noire
friable
Polyamides
(6, 6-6, 11)
Fond et se
rétracte
Brûle lentement
avec fusion
Flammes moyennes qui
s’éteignent assez
rapidement, avec une
fumée blanche.
Boule dure
plus ou moins
noire
Polyester Fond et se
rétracte
Brûle lentement
avec fusion
S’éteint avec une fumée
noire
Boule dure
brune ou
noirâtre
Acrylique Commence à
fondre Brûle avec fusion
Continue à brûler avec
une odeur rappelant
l’amande amère
Cendres
irrégulières
noires et
dures
Polyéthylène,
polypropylène Brûle avec fusion
Continue à brûler, mais
s’éteint au bout de peu
de temps
Boule brune
ou noirâtre

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
12
Tableau 1.3 : Caractères morphologiques de quelques matières textiles
Nature de la fibre
Vue longitudinale
(grossissement moyen ×150)
Coupe transversale
(grossissement moyen
×800 à ×1000)
Coton Rubans plats spiralés.
Section en haricot ou très
ovalisée avec canal central en
fente.
Fibres ligneuses
(chanvre, lin, jute)
Fibres avec canal médullaire, souvent
cloisonnées par des parois transversales.
Cellules nettement ou
approximativement
polygonales suivant la partie
de la plante.
Laine et poils
animaux
Fibres régulières creuses à mince paroi.
Présence caractéristique d’une écorce à
écailles en tronc de palmier.
Section lisse à mince paroi.
Soie
Ruban lisse sans stries ou spirales
caractéristiques. Dans la soie brute, les
filaments sont accolés étroitement entre
eux.
Section triangulaire à
faces courbes
Viscose Fibre de diamètre régulier avec souvent
des stries longitudinales continues.
Section généralement à
contour dentelé
Polyamide Surface lisse. Pas de stries longitudinales
continues.
Section circulaire ou
approximativement et lisse ou
multilobée.
Polyester Surface lisse. Aspect très régulier et
homogène.
Section circulaire et lisse ou
multilobée.
Acrylique
Aspect plus ou moins plat, cylindrique
pour certains types, souvent avec courtes
stries longitudinales.
Suivant le type, section
bilobée en os de chien, en
haricot, ronde et lisse, ou
seulement à contour finement
dentelé.

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
13
Tableau 1.4 : Solubilités de quelques fibres textiles dans les solvants usuels.
Solvant
Fibres
Acide
sulfurique
concentré
75 %
Acétone
Acide
Acétique
100 %
Acide
Formique
98 %
DMF Nitrobenzène
Coton soluble insoluble insoluble insoluble insoluble insoluble
Viscose soluble insoluble insoluble insoluble insoluble insoluble
Laine insoluble insoluble insoluble insoluble insoluble insoluble
Polyamide 6 soluble insoluble soluble soluble soluble Partiellement
soluble
Polyamide 6-6 soluble insoluble soluble soluble soluble insoluble
Polyamide 11 soluble insoluble soluble soluble soluble soluble
Polyester insoluble insoluble insoluble insoluble soluble soluble
Acrylique soluble insoluble insoluble insoluble soluble insoluble
2.2. Détermination de la masse linéique du fil
On distingue deux systèmes d’unités pour la masse linéique du fil :
— système d’unité directe (titrage) ;
— système d’unité indirecte (numérotage).
2.2.1 Système d’unité directe (titrage) :
Le système Tex : La masse linéique du fil est égale à la masse en gramme de 1000
mètres de ce fil [21].
1000)(/)( mLgMTitre (éq.1.1)
M est la masse du fil exprimée en gramme et L est la longueur du fil exprimée en mètre.
Système denier : La masse linéique du fil, est égale à la masse en gramme de 9000
mètres de ce fil. C’est un ancien système d’unité directe, mais très utilisé pour les
fils de soie.

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
14
2.2.2 Système d’unités indirect (ou système de numérotage)
La masse linéique du fil est égale à la longueur en mètres de ce fil par sa masse en
grammes.
(éq.1.2)
L est la longueur du fil exprimée en mètres et M est la masse du fil exprimée en grammes.
2.3. Mesure de la torsion du fil
La torsion d’un fil est caractérisée par son sens de torsion et son nombre de tours par mètre.
On détermine cette torsion par un torsiomètre, en appliquant différentes méthodes. Par
exemple, on peut citer la méthode simple de détorsion-rétorsion du fil tendu par une tension
proportionnelle à son titre (le torsiomètre est doté de masselottes adéquates) [22]. Le sens de
torsion est déterminé à l’œil nu, le sens de torsion du fil peut être en (S : gauche ou Z : droite)
selon la figure 1.6.
Figure 1.6 : Sens de torsion d’un fil. a) Torsion type « S ». b) Torsion type « Z »
2.4. Nombre de fils par cm
On effectue le comptage du nombre du fil pour la chaîne et pour la trame à l’aide d’une
loupe ou d’un compte-fils, on compte à travers la fente du compte-fils le nombre de fils
contenu dans un champ de 1 cm du tissu pour les deux sens de l’étoffe (chaîne et trame) [23].

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
15
2.5. Détermination de la masse surfacique du tissu
La masse surfacique est une grandeur qui mesure la masse de l’étoffe par unité de surface.
L’unité de mesure de la masse surfacique du tissu dans le système de normalisation
international de textile est (g/m²) [24].
La masse surfacique de l’étoffe est déterminée par pesée de plusieurs éprouvettes (3 à 5) de
dimensions 10x10 cm².
La masse surfacique d’un tissu est égale à la masse en grammes d’un mètre carré de ce
tissu.
(éq.1.3)
2.6. Détermination de l’armure du tissu
Toute variété d’entrelacement des fils d’une étoffe tissée est appelée armure. Elle peut être
représentée par un dessin mis en cartes, indépendamment de la qualité du tissu ou du fil utilisé.
La représentation graphique des armures s’effectue au moyen d’un papier quadrillé, les
colonnes verticales représentent les fils de chaîne et les rangées horizontales les fils de trame
[25]. On colore la case correspondant au passage d’un fil de chaîne sur un fil de trame. La case
qui n’est pas colorée correspond au passage du fil de trame au-dessus de fil de chaîne. Une fois
la représentation graphique obtenue, on la compare avec les armures de base pour déterminer
l’armure du tissu.
3. Le phénomène du frottement
3.1. Introduction
Le frottement est un phénomène physique important dans notre vie et dans le monde qui
nous entoure. Les premières formules du frottement solide/solide ont été proposées par
Amontons en 1699 [26] puis par Coulomb en 1780 [27]. Ce sont les lois que l’on applique
actuellement et qui se résument comme suivent : la force de frottement Ff est proportionnelle à
la charge normale appliquée Fn et indépendante de la surface apparente de contact.

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
16
Dans l’industrie, le frottement, après la corrosion, est le second facteur responsable de la
dégradation des matériaux.
3.2. Les forces de frottement
Dès qu’un solide est mis en contact avec un autre solide, il apparaît un phénomène
d’adhérence que l’on appelle frottement [28]. Le frottement provient des interactions
microscopiques entre les aspérités existant à la surface des corps en contact. En général, on
définit le frottement comme étant la résistance mécanique au glissement relatif de deux solides
en contact. Lorsque cette « résistance » garde les deux solides à l’état statique, malgré
l’application d’une force visant à faire déplacer l’un par rapport à l’autre, on parle alors de
frottement statique.
3.3. Frottement statique
Chaque fois qu’un solide A est posé sur un solide B, il apparaît une force de contact C.
Si le solide A n’est soumis à aucune force tangentielle à la surface de contact, la force C est
perpendiculaire à cette surface (Figure 1.7).
Figure 1.7 : Deux solides A et B en contacta) Sans force tangentielle. b) Avec une force
tangentielle.

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
17
3.4. Coefficient de frottement
Dès que le solide A est soumis à une force extérieure Fext, et même s’il reste au repos, C
n’est plus perpendiculaire à la surface de contact, mais s’incline d’un angle θ par rapport à la
normale, s’opposant ainsi au mouvement (Figure 1-8). La force de contact C se décompose
ainsi en deux forces : la réaction R du support et la force de frottement Ff.
En réalité, θ n’est pas un angle fixe. Il dépend de la valeur de Fext, comme le montre la
(Figure 1.8), où l’on voit bien qu’à l’état statique Ff est toujours égale à Fext .
Figure 1.8 : Deux solides A et B en glissement (a), (b) et (c) montre la croissance de l’angle ɵ
L’angle θ va continuer ainsi d’augmenter en fonction de jusqu’à ce que, pour une
valeur précise de Fext qu’on appellera force de frottement cinétique. L’état statique est rompu
et le solide A se met en mouvement. Cette situation sera caractérisée par un angle ɵ limite : ɵlim
= φ. Cet angle limite φ s’appelle angle d’adhérence. L’expérience démontre que la surface de
contact pour tout couple de matériaux (et sous conditions données : surfaces sèches, surfaces
graissées, surfaces lubrifiées, etc.) est caractérisée par une valeur bien déterminée du rapport Ff
max. / R, auquel les physiciens ont donné le nom de coefficient de frottement statique s .
Comme :
sf RF /max (éq.1.4)
et : tans
(éq.1.5)
Alors : tan/max RFf (éq.1.6)

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
18
Le coefficient de frottement est une valeur sans dimension qui est évaluée
expérimentalement. Il décrit donc le rapport entre la force de frottement entre deux surfaces et
la force de pression qui maintient le contact de l’une contre l’autre. La plupart des matériaux
dans des conditions sèches ont des valeurs de coefficient allant de 0,1 à 0,6. Le Téflon, qui
possède un coefficient faible, une valeur de 0,04. Une valeur de R supérieure à 1 indique une
force de glissement supérieure à la force normale que l’objet applique à la surface. La force de
frottement est dans la direction opposée au mouvement.
En réalité, au niveau microscopique, on peut distinguer la surface de contact apparente de
la surface de contact réelle. Ce que nous voyons à l’œil nu est la surface apparente, qui est très
différente de la surface réelle à cause des aspérités et des rugosités de surface. Les lois du
frottement énoncées par Amontons-Coulomb ont été établies empiriquement avec des essais sur
du bois et des aciers. À cette époque, seule la surface de contact apparente était prise en
compte.
3.5. Le phénomène du bruit engendré par le frottement
Dans les années 50, les recherches menées par Bowden et Tabor [29] ont enrichi les lois
classiques du phénomène de frottement en introduisant de nouveaux paramètres pour affiner la
compréhension mécanique du frottement entre les matériaux. Ils ont introduit la prise en
compte de l’aire réelle de contact qui est liée étroitement aux propriétés physiques des
matériaux. La surface de contact apparente présente une multitude de microcontacts : c’est la
rugosité de surface qui donne l’aire réelle de contact. La figure1.9 présente deux solides B1 et
B2, ayant deux surfaces planes S1 et S2, en glissement. Le bruit résultant peut être dû à
l’instabilité mécanique de type stick-slip et à la rugosité de surface. Le bruit de frottement est
dit « bruit de rugosité » si les surfaces frottées sont rugueuses et si le chargement normal
appliqué est relativement faible. Dans ce cas, le contact est réalisé au niveau des surfaces S1 et
S2 pour un certain nombre d’aspérités appelées « régions de contact » selon Greenwood et
Williamson [30].

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
19
Figure 1.9 : Interfaces multicontacts.
Cette géométrie est désignée souvent par le nom « interfaces multicontacts ». Dans cette
zone, l’aire de contact réelle est beaucoup plus petite que la surface apparente.
Le contact effectif s’effectue uniquement au niveau des aspérités de surfaces comme cela
est indiqué dans la Figure 1.9 par des cercles noirs. Cette nouvelle approche de l’influence de la
rugosité des surfaces en contact a aidé plusieurs chercheurs à observer un autre phénomène lié
au frottement dénommé « le vibroacoustique ». Au cours du glissement de deux solides en
contact, un bruit de frottement est généré. Il est connu comme un « vibroacoustique » du
contact de glissement. Il dépendra de l’environnement et des paramètres physiques du
frottement [8]. Le schéma de la Figure 1.10 montre les différentes sources et modes de
génération des vibroacoustiques et donne quelques exemples communs.

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
20
Figure 1.10 : Classification du bruit de frottement selon la sévérité du contact.
À l’échelle microscopique de la surface de contact de deux matériaux, et selon le modèle
de rugosité énoncé Bowden et Tabor [29], si la pression de contact est faible alors l’aire réelle
de contact l’est aussi. Les deux solides sont découplés à cette échelle, ce qui provoque de
multiples impacts entre les aspérités en contact, le bruit de rugosité dépendra largement de la
dynamique du glissement, de la rugosité des surfaces frottées, de la vitesse de glissement et des
forces de contact.
Dans la littérature, on trouve plusieurs travaux sur la vibration liée à l’instabilité de
frottement. Elle est considérée comme un phénomène non linéaire et qui se manifeste par la
perte de stabilité de contact entre deux solides donnant naissance à des réponses vibratoires
[7][8][31].

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
21
3.6. Instabilité de frottement
C’est un phénomène non linéaire qui se produit lors du frottement de deux objets en
contact dynamique et pouvant être à l’origine des fréquences20
vibratoires qui peuvent se situer
dans le domaine des fréquences audibles [20 Hz à 20 kHz] (fréquences acoustiques1). Ce type
de vibrations, qui peut donner des bruits intenses comme le crissement des pièces de machine,
est un problème qui a été largement étudié par les mécaniciens. On peut relever notamment les
études menées par Moirot [32] qui a cherché à trouver les caractéristiques les plus pertinentes
du glissement et l’adhérence de la surface de contact.
3.7. Bruit de frottement
L’étude du bruit de frottement n’est pas limitée aux études menées par les chercheurs
attachés à résoudre les problèmes de l’instabilité de frottement des corps rigides. On peut
l’observer tout simplement en frottant nos mains entre elles. Le bruit entendu est lié à la
rugosité de surface et à la vitesse relative du glissement.
Des recherches récentes pour la compréhension du lien entre le bruit engendré par
frottement et l’état de surface ont donné une exploitation de ce bruit pour révéler la nature et la
qualité de cette surface. Dans certaines applications ne relevant pas du domaine de la
mécanique conventionnelle, une signature acoustique du bruit de frottement peut être
révélatrice de l’état de surface de la peau humaine selon l’âge de la personne [33]. Un exemple
est présenté dans la Figure 1.11.
Pour identifier la signature acoustique, les recherches actuelles enregistrent le bruit de
frottement puis, dans un second temps, le caractérisent par certains paramètres significatifs tels
que la pression acoustique, entre autres. Ces paramètres seront explicités et qui seront
développés dans le paragraphe suivant.

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
22
Figure 1.11 : L’empreinte acoustique de la peau humaine selon l’âge des personnes.
3.8. Caractérisation d’un frottement
3.8.1 La pression acoustique
Le Bot et al. [34] ont étudié le bruit en fonction de l’aire apparente de contact et ils ont
déduit que le bruit rayonné était proportionnel à l’aire apparente de contact. Othman et al. [8]
ont développé un appareil de mesure du bruit de frottement permettant la mesure du bruit
rayonné lors du passage d’un stylet sur une surface plane. Les résultats ont présenté une
fonction logarithmique de la pression acoustique Lp (dB13
) et la rugosité de la surface de
contact selon l’équation suivante (éq.1.7)
n
p RadBL 10log20)(
(éq.1.7)
Cette fonction logarithmique montre que la pression acoustique est directement reliée à la
rugosité de surface (Ra). Le paramètre n est déterminé expérimentalement. Il exprime la
variation du niveau sonore26
rayonné en fonction de la rugosité des surfaces frottées.
Les travaux de Stoimenov et al. [35] ont porté sur le bruit rayonné du frottement de deux
surfaces plan/plan ; le mouvement du frottement étant manuel. Dans ces travaux, la rugosité des

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
23
surfaces des deux éprouvettes en acier inoxydable [0,8 ; 12,4] μm était connue. L’essai a été
effectué dans une chambre sourde33
avec un micro placé à 30 cm des éprouvettes.
3.8.2 Le spectre de fréquence
Sur les mesures réalisées grâce à l’appareil de mesure du frottement d’Othman et al. [8], le
spectre du bruit35
présentait un pic appelé « fréquence dominante » indépendante de la rugosité
de surface et des forces de contact. Il dépendait uniquement de la nature de la matière des
éprouvettes d’essai. Les travaux de Stoimenov et al. [35] ont montré une augmentation de
l’amplitude du bruit en fonction de la rugosité de surface des éprouvettes d’Inox connues au
début de l’essai [0,8 ; 12,4] μm. Cependant, leurs essais ne prenaient pas en compte la vitesse
de glissement et la force normale puisque l’essai était manuel. La Figure 1.12 présente l’essai
de Stoimenov.
Figure 1.12 : a) Essai manuel de frottement. b) Enceinte anéchoïque.
Dans les observations de Yokoi et Nakai [36][37], et selon leurs données spectrales, le
décalage des fréquences maximales n’a pas eu lieu en faisant varier la rugosité des surfaces en
contact, mais les pics les plus élevés du spectre du bruit se sont produits dans la direction du
frottement. Cela a conduit Yokoi et Nakai, ainsi que d’autres chercheurs Jibiki et al. [38], à
revoir l’effet de la vitesse de glissement sur le bruit de la rugosité des surfaces en contact. Dans
leurs travaux, les surfaces de contact étaient pion-disque pour Yokoi et Nakai et cylindre-
cylindre pour Jibiki et al. Leurs constatations les ont conduits à proposer une nouvelle formule
qui relie le niveau de la pression acoustique25
)(dBLp à la vitesse de glissement :
(a) (b)

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
24
m
p VdBL 10log20)( (éq.1.8)
On obtient une fonction logarithmique de pente m. m est compris entre [0,6 ; 1,1] pour un
frottement pion-disque et égal à 0,85 dans le cas des deux cylindres.
Récemment, Ben Abdelounis [39], s’est intéressé au bruit de rugosité plan-plan. Il a
développé un dispositif expérimental « Tribonoise » (Figure 1.13) pour étudier de plus près
l’état de surface de contact en réalisant une topographie 3D (Figure 1.13). Il a obtenu la
distribution réelle des aspérités qui entrent en contact durant le frottement.
Figure 1.13 : Dispositif expérimental « Tribonoise » Topographie 3D de surface
(a) Ra =15 μm (électroérosion), (b) Ra = 1 μm (sablage).
Dans ses travaux, l’auteur a notamment utilisé des éprouvettes en acier au carbone XC48
avec une forme parallélépipédique de dimensions 120×22×8 . L’une des faces 122×22
a été traitée par sablage pour l’obtention d’une rugosité Ra de 1μm, 2,8 μm, 4 μm et 15
μm, et l’autre a été traitée par électro-érosion pour une rugosité Ra de 1 μm, 4 μm, 8 μm.
Il a montré que le bruit de frottement est engendré par des impacts interaspérités des
surfaces en contact et que le niveau sonore était fonction de la rugosité et de la vitesse relative
de frottement lors du contact dans une configuration plan-plan en matière rigide.

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
25
3.9. Frottement des matériaux souples
Wilson en 1963 [40] a été le premier à montrer que l’expression de la force de frottement
surface textile contre elle-même suit la loi de puissance établie initialement par Bowden et al.
en 1959 [29].
Les recherches menées par Aliouche [41] pour le contact textile/métal nous permettent de
considérer que le frottement des matériaux souples dépend de la nature du contact, de la
géométrie de contact et de la surface textile. La surface du frottement, quelles que soient les
méthodes de fabrication, aussi précises soient-elles, ne pourront présenter une surface d’une
planéité absolue. Toutes les surfaces obtenues, par les procédés les plus évolués, contiennent
des irrégularités à l’échelle macroscopique ou microscopique. Ces irrégularités diffèrent selon
la nature de la matière et les procédés de fabrication. La surface des étoffes peut être composée
de fils entrecroisés (tissus) ou entrelacés (tricots) ou d’une nappe de fibres dont la cohésion est
donnée par thermoliage, liage chimique, jet d’eau ou par action mécanique (non-tissés). La
rugosité des étoffes diffère donc totalement de la surface des matériaux rigides, la question qui
se pose est : quels seront les paramètres pertinents qui influent sur le bruit engendré par le
frottement ?
Il est évident que dans le domaine textile, on sera face à un milieu fibreux multicouche. Ce
milieu est défini par la superposition d’une couche inférieure et d’une couche supérieure. La
couche inférieure est la structure intime constituée de fils ou de fibres et la couche supérieure
est constituée de fibres qui forment les aspérités fibreuses ainsi que la pilosité de surface [42].
C’est cette partie supérieure qui subit le frottement. L’état de surface des matières fibreuses a
été étudié par Dia [43] par un dispositif développé au sein du laboratoire LPMT (Figure 1.14)
et qui permet d'évaluer la surface par des variations fines. Cette méthode est applicable grâce au
frottement d’une lame vibrante sur des surfaces textiles dont les aspérités sont comprises entre
1 et 2 mm.

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
26
Figure 1.14 : Dispositif d’évaluation de surface fibreuse.
3.10. Frottement des textiles
Le frottement en textile a fait l’objet de plusieurs études Howell et al. [44][45][46], Postle
et al. [47], Morrow [48], et Kawabata et al. [49]. Ils ont établi une corrélation entre les
propriétés morphologiques de la matière textile (rugosité de surface, titre et nature des fibres, la
texture de l’étoffe), et les conditions expérimentales (charge normale appliquée, vitesse de
glissement, température et humidité relative). Selon la nature des surfaces frottées, nous
constatons plusieurs types de frottement. Nous pouvons les considérer comme suit :
— Fibre-Fibre : c’est ce type de frottement qui conditionne notamment le comportement en
traction du fil et de l’étoffe.
— Fil-Fil : c’est ce type de frottement qui conditionne le comportement au cisaillement du
tissu.
— Tissu-Métal : c’est ce type de frottement qui conditionne le comportement du tissu
durant sa fabrication ou sa transformation en confection.
— Étoffe-Étoffe : c’est ce type de frottement qui conditionne notamment le comportement
à l’abrasion de l’étoffe.
Notre étude se concentrera sur le frottement (étoffe/étoffe). La mesure instrumentale de ce
frottement et de l’état de surface des étoffes dans notre laboratoire s’effectue usuellement grâce

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
27
au système KES-F [50](Kawabata Evaluation System for Fabrics) dont le principe va être
présenté dans le paragraphe suivant.
3.11. Mesure de frottement par la chaîne d’évaluation Kawabata
Le KES-F (Kawabata Evaluation System for Fabrics), développé par le professeur
Kawabata, est une chaîne de mesure composée de plusieurs modules. Elle permet une
évaluation globale du toucher et de la qualité des étoffes. Les tests réalisés avec la chaîne de
KES-F ont la particularité d’imposer de faibles sollicitations aux étoffes et d’étudier cette
dernière en sollicitation et en relaxation.
Le module KES-FB4 est le module de mesure du frottement et de la rugosité des surfaces
textiles. Ce module (Figure 1.15), fournit le Ra appelé SMD : Surface Mean Deviation et deux
paramètres de frottement : le coefficient de frottement MIU et la déviation par rapport à la
moyenne du coefficient de frottement MMD. Les mesures sont unidirectionnelles et elles sont
effectuées dans le sens chaîne puis dans le sens trame. L’étoffe, de 20 cm de côté, fait un aller-
retour de 3 cm sous le ou les palpeurs à une vitesse de 1 mm/s. La mesure des paramètres se
fait sur une longueur de 2 cm dans chaque sens. Les 5 premiers et derniers millimètres de la
course ne sont pas pris en compte afin de ne pas fausser les mesures par les instabilités du
système. Les capteurs sont de type inductif.
Figure 1.15 : KES-FB4 Module de Surface de la chaîne Kawabata
Le palpeur de frottement est constitué de 10 cordes à piano identiques (longueur 5 mm et
diamètre 0,5 mm) juxtaposées, ce qui donne un frotteur de 5 mm×5 mm. L’étoffe étant déplacée

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
28
perpendiculairement aux cordes, le contact peut être qualifié de multilinéaire. La charge
normale est de 50 cN. Le coefficient de frottement et ses variations, sans dimension, sont
calculés comme suit :
Coefficient de frottement instantané :
PF / (éq.1.9)
Coefficient de frottement :
dLL
LMIU 0
)/1(max
max (éq.1.10)
Variations du coefficient de frottement :
dLL
LMMD 0
)/1(max
max (éq.1.11)
Avec : F : force de frottement instantanée.
P : force normale exercée par le frotteur sur l’étoffe.
: distance parcourue sur le tissu.
: longueur de tissu sur laquelle la mesure est faite (3 cm).
3.12. Bruit de frottement des matériaux souples
Dans la littérature, on est face à une limitation des méthodes de mesures objectives et
subjectives des sons engendrés par le frottement des matériaux souples textiles. L’étude la plus
ancienne date de 1961. Elle se résume dans les travaux menés par Walter [51] qui a introduit la
notion spectrale du son produit par la friction des fibres et des tissus. Les tests furent réalisés
grâce à un premier instrument breveté en 1960 [52] et présenté par la Figure 1.16. Ces travaux
sont basés sur l’enregistrement phonique du frottement afin de trouver un lien entre la matière
sollicitée par le frottement et son amplitude acoustique.

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
29
Figure 1.16 : Instrument de frottement des fibres et des tissus.
A-Moteur. B-Ensemble d’engrenage. C- Deux disques de même diamètre. D-Support
disque. E-Traverse de la tête supérieure. F- Niveau. J-Disque inférieur. P-Plateau.
Les expériences menées par ce chercheur sur la friction des fibres de laine ont indiqué que
les propriétés de ces fibres peuvent être déduites par l’analyse du spectre du son produit par la
friction de cette matière. Dans une autre étude du même chercheur, on observe une
amélioration de son instrument expérimental pour des essais de friction des tissus [53]. Il a
trouvé que l’amplitude du son généré par le frottement des surfaces de ses échantillons dépend
de la nature de la matière, de la structure du tissu et du traitement d’ennoblissement*.
Les travaux de Walter ont montré que l'approche acoustique conduit à une méthode
objective de comparaison des propriétés du toucher du textile, dont la majorité est
habituellement évaluée subjectivement. Des tissus de mélanges en matière première différente
étaient classés identiques par le toucher d’un panel sensoriel. Les tests menés par ce chercheur
dans le cadre de ses travaux ont montré qu’ils sont différents par l’approche acoustique
développée.
En 2000, Eunjou [54] a développé un appareil pour mener des essais de frottement de
textiles et établir ainsi une relation entre les paramètres mécaniques du textile et le niveau du
bruit du frottement. Il utilisa un appareil de mesure des tissus qui a été breveté en 2006 [55].
(Figure 1.17).

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
30
Figure 1.17 : Générateur de son en frottement
A. Piston. B. Valve. C et D. Poids. E. Échantillon (15x15cm²). F. Échantillon (15x75cm²).
J. Support. K. Microphone.
Trois paramètres sonores du tissu ont été quantifiés. Ces trois paramètres sonores sont
(LPT), (ΔL) et (Δ f).
- (LPT) se calcule selon la formule ci-dessus :
(éq.1.12)
Avec L : niveau sonore de chaque bande du spectre du son sur la gamme de 20 Hz – 20
kHz.
- (ΔL) est la plage de niveau sonore, (ΔL) est défini comme :
(éq.1.13)
- (Δ f) est l’écart de fréquence, est défini comme :
é é (éq.1.14)
Une autre recherche a été initiée par Sukigara en 2001 [56] afin d’obtenir une évaluation
subjective du bruit de froissement de tissus. La méthode employée consiste à frotter le tissu
contre lui même avec sa partie inférieure manuellement (Figure 1.18). Les enregistrements sont

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
31
évalués par le jugement hédonique (agréable ou désagréable) du son des échantillons par des
personnes. Quelques travaux de recherches relevés dans la littérature sur le bruit de frottement
des tissus, sont des recherches subjectives [57][58][59], qui ont pour objectif de déterminer les
paramètres psycho-acoustiques qui affectent la sensation subjective du son de tissu par rapport
à des données acoustiques. D’autre travaux portent sur les corrélations du son et les
caractéristiques physiques du tissu [60][61].
Figure 1.18 : Essai de frottement manuel du tissu.
4. Conclusion
Ce chapitre a décrit l’évolution dans le temps de la compréhension du phénomène du
frottement, depuis les premières lois classiques énoncées par Amontons (1699) et Coulomb
(1780) jusqu’aux dernières méthodes menées par des chercheurs des domaines de la mécanique
et de l’acoustique pour la caractérisation du phénomène de frottement. On peut les résumer en
une phrase : « la force de frottement est proportionnelle à la charge normale appliquée et elle
est indépendante de la surface apparente du contact ».
Cette approche du frottement fut largement étudiée pour les matériaux rigides (métal-
métal), mais rarement pour les matériaux souples et fibreux (frottement textile/textile).

Chapitre 1 : Généralités sur le textile et le phénomène de frottement
32
Selon la littérature, le premier instrument utilisé pour générer du bruit par frottement dans
le domaine textile a été breveté en 1960 aux États Unis avec un mouvement rotatif des
échantillons. Le deuxième a été breveté en 2001 en Corée, avec un mouvement de translation
des échantillons. Les recherches qui suivirent se basèrent sur un instrument ayant un
mouvement de translation de l’étoffe sur elle-même. Le bruit des tissus généré par le frottement
de tissu sur lui-même ou avec un autre tissu peut être considéré comme une gêne acoustique qui
peut avoir une incidence sur la qualité de certains produits. Notre étude se situe dans cette
problématique de diminution de cette gêne engendrée par le frottement inter-étoffes.
Cependant, les différents appareils présentés dans la littérature présentent un mouvement
vraiment différent du mouvement du frottement réel. C’est pourquoi, pour parfaitement étudier
le son du frottement, nous avons besoin de les étudier dans des conditions se rapprochant le
plus possible de la réalité. Nous allons donc concevoir un nouvel instrument expérimental.
Le chapitre qui suit présentera une étude et une analyse du mouvement d’un individu. Cette
étude permettra de comprendre le phénomène du balancement du bras au cours de la marche de
l’individu, qui est une des causes de génération du son par le frottement du vêtement. Nous
nous attacherons alors à mettre en évidence les paramètres déterminants et les conditions du
fonctionnement de l’instrument de mesure.

33
CHAPITRE 2
IDENTIFICATION DES
PARAMÈTRES DE FROTTEMENT

Chapitre 2 : Identification des paramètres de frottement
34
1. Introduction
Les premières études de la cinétique du corps humain peuvent être attribuées aux
recherches des pionniers du XIXe siècle comme Muybridge (1887), Marey (1873), et Braune et
Fisher (1895). Elles avaient marqué le début de l’analyse des mouvements grâce à la
cinématographie [62]. L’image était généralement limitée à un seul plan, comme l’illustre la
Figure 2.1.
À la fin du XXe siècle, le développement des systèmes informatiques et de la photographie
à haute fréquence a énormément aidé à déterminer avec précision l’information spatiale et
temporelle des positions des segments des membres du corps humain [63]. L’analyse
quantitative et qualitative de ces mouvements relève du domaine de la biomécanique, une
science que l’on définit comme « la science qui relie les forces internes et externes aux corps
humains, ainsi que les effets produits par ces forces ». Cette discipline considère le système
« musculosquelettique » humain comme une série de segments rigides liés entre eux par des
articulations sphériques lisses et ayant un certain nombre de degrés de liberté.
Figure 2.1 : Inscription chronophotographique du mouvement par Marey[64]
L’analyse du mouvement humain est bien souvent liée à une prise de décision, qu’elle soit
technique, tactique, clinique ou ergonomique. Les principales méthodes utilisées pour cette
analyse sont d’une part celles qui mesurent les signaux physiologiques (fréquences respiratoires
ou cardiaques, efforts et échanges thermiques), et d’autre part celles qui mesurent le
mouvement cinématique en lui-même : trajectoire, vitesse et accélération. Dans notre étude,

Chapitre 2 : Identification des paramètres de frottement
35
nous nous intéressons au mouvement en lui-même sans aborder les aspects physiologique ou
dynamique ; et en nous limitant au déplacement de la partie supérieure du corps humain.
2. La marche
La marche se définit comme la translation de l’ensemble du corps humain consécutive à
des mouvements de rotations segmentaires. Elle résulte d’une activité alternée des deux
membres inférieurs, assurant à la fois le maintien de l’équilibre et la propulsion [65].
En biomécanique, on utilise généralement trois plans imaginaires liés au corps humain et
orientés perpendiculairement les uns par rapport aux autres. On les appelle aussi les « plans
anatomiques du corps humain ». On distingue ainsi le plan sagittal29
(de profil), le plan frontal28
(de face) et le plan horizontal30
(axial) [62] comme indiqué sur la Figure 2.2.
Figure 2.2 : Plans anatomiques du corps humain.
2.1. Mouvement du bras pendant la marche
Les humains ont tendance à balancer leurs bras quand ils marchent, bien que les bras
n’aient aucun rôle pour propulser le corps en avant. Collins [65] a montré que le mouvement
des bras en marchant présente un intérêt majeur. En se balançant, les bras facilitent le
mouvement des jambes. Il y a aussi une augmentation de la force de l’appui du pied sur la terre.

Chapitre 2 : Identification des paramètres de frottement
36
Ce chercheur affirme que, malgré la facilité du processus du mouvement des bras, son effet sur
la consommation d’énergie du corps est très important : ce mouvement aide à économiser de
l’énergie, ce qui donne la capacité à marcher pendant une période plus longue.
En observant le balancement des bras lors de la marche, nous constatons que ce
mouvement provoque une friction entre les parties « manches » et « tronc » du vêtement, ce qui
engendre un bruit de frottement. Pour pouvoir reproduire ce son avec un dispositif mécanique,
il nous faut déterminer quelle est la surface frottée, quelles sont les forces appliquées, et quelle
est la vitesse du mouvement.
Nous avons donc étudié ce mouvement en faisant varier les matériels et les protocoles.
Lors de ces essais, nous avons aussi fixé une contrainte très importante : ces variations ne
doivent pas entraver la bonne exécution du mouvement. Il nous a fallut donc installer le
volontaire dans des conditions de déplacement les plus proche possibles de sa marche naturelle.
3. Partie expérimentale
L’objectif principal de cette étude consiste à examiner le mouvement de l’avant-bras
frottant sur le tronc. Nous avons utilisé un système d’imagerie et de capture du mouvement
(vidéo) selon un plan sagittal. Le traitement de ce film a été réalisé à l’aide du logiciel Dartfish
[66].
3.1. Les marqueurs
Afin de définir la vitesse et l’amplitude du mouvement, des marqueurs passifs sont fixés
sur l’avant-bras du sujet grâce à un adhésif à double face. La Figure 2.3 illustre un sujet
représentatif. Nous avons positionné les marqueurs selon les points d’articulation du bras, et un
autre au milieu du tronc du sujet.

Chapitre 2 : Identification des paramètres de frottement
37
Figure 2.3 : Placement des marqueurs sur le bras.
3.2. Protocole expérimental
La contrainte majeure de mise en place du protocole d’essai consista à déterminer des
conditions expérimentales qui ne dénaturent pas le mouvement réel de l’individu et qui
n’entrainent pas de fatigue physique inutile au cours des essais. Nous avons pour cela choisi un
tapis de course disposant de trois vitesses : marche, jogging et course. À cause de ces
conditions expérimentales (tapis de course en salle), le sujet volontaire a été, dans un premier
temps, perturbé. Les premiers enregistrements nous ont seulement permis d’observer le
mouvement sur le tapis (Figure 2.4). Après de nombreuses répétitions, cette attitude est
devenue de plus en plus naturelle. Après plusieurs séries de films, nous avons pu déterminer les
conditions d’essais suivantes :
— Vitesse du tapis de courses : pour la marche (2 km/h), pour le jogging (7 km/h), et pour
la course (9 km/h).
— Temps d’enregistrement : (30 s) pour chaque vitesse, avec un arrêt de 2 min entre les
essais du sujet.
— Arrière-plan : une planche blanche de 190 × 180 cm².
— Distance de la caméra sur support : 150 cm ┴ au tapis.

Chapitre 2 : Identification des paramètres de frottement
38
Figure 2.4 : Enregistrement vidéo du mouvement.
3.2.1 La vitesse du frottement
Les séquences obtenues à partir des découpages partiels des films enregistrés, selon des
conditions de mouvement fixes, ont été traitées par le logiciel [67], qui nous donne les
différentes localisations des marqueurs en fonction du temps. Nous en avons alors déduit la
distance parcourue par le marqueur à partir de ces positions. En appliquant la formule (éq.2.1),
nous pouvons donc calculer la vitesse linéaire du mouvement du bras (Figure 2.5).

Chapitre 2 : Identification des paramètres de frottement
39
Figure 2.5: Séquences de film : mouvement du bras. (a) Marche. b) Jogging. c) Course.
(éq.2.1)
Avec :
: vitesse linéaire en [m/s]
d : distance parcourue en [m]
t : temps en [s]
3.2.2 Schéma du trajet du mouvement du bras
En nous basant sur l’aspect temporel du mouvement et sur les positions de l’avant-bras
durant le déplacement (marche, jogging et course), nous obtenons les trajectoires schématisées
par la Figure 2.6. Elles illustrent le trajet du marqueur selon les points de l’image réelle traitée
par le logiciel.

Chapitre 2 : Identification des paramètres de frottement
40
Figure 2.6 : Trajectoires du mouvement du bras. a) Marche. b) Jogging. c) Course.
En utilisant la fonction de calcul de la trajectoire du logiciel Inkscape [54], nous obtenons
directement la longueur en mètre de chaque trajectoire. Six essais au minimum sont réalisés
pour chaque type de mode. Ces valeurs obtenues sont reportées dans le tableau 2.1.
Les temps sont obtenus directement à partir des films réalisés ; ils sont présentés dans le
tableau 2.2.
La vitesse linéaire du mouvement du bras a été calculée par la formule donnée dans
l’équation (éq.2.1) ; ses résultats sont indiqués dans le tableau 2.3.
a) (BB’ ) W distance en mode marche,
b) (BB’) J distance en mode jogging,
c) (BB’) R distance en mode course,
Tableau 2.1 : Longueur des trajectoires du balancement du bras.
Distance [m] d1 d2 d3 d4 d5 d6 Moyenne
dm CV %
(BB’) W 0,241 0,245 0,238 0,237 0,242 0,247 0,24 1,47
(BB’ ) J 0,489 0,492 0,487 0,499 0,498 0,483 0,49 1,17
(BB’ ) R 0,561 0,566 0,557 0,559 0,569 0,559 0,56 0,76
(a) (b) (c)

Chapitre 2 : Identification des paramètres de frottement
41
Tableau 2.2 : Temps parcourus obtenus à partir des séquences du film de mouvement du bras.
Temps [s] t1 t2 t3 t4 t5 t6 Moyenne (tm) CV %
(BB’) W 0,45 0,39 0,4 0,48 0,43 0,42 0,43 7,06
(BB’) J 0,49 0,51 0,55 0,53 0,55 0,49 0,52 4,84
(BB’) R 0,33 0,34 0,34 0,34 0,35 0,33 0,34 2,03
Tableau 2.3 : Vitesses du mouvement du bras.
Vitesse [m/s] V1 V2 V3 V4 V5 V6 Moyenne
Vm CV %
Marche 0,53 0,62 0,59 0,49 0,56 0,58 0,561 7,51
Jogging 0,99 0,96 0,88 0,93 0,9 0,98 0,94 4,30
Course 1,68 1,65 1,64 1,62 1,63 1,67 1,649 1,24
Les résultats montrent une dispersion acceptable (CV %), bien qu’elle soit plus importante
lors de la marche.
3.3. Calcul de la surface de frottement
Le but de cette étude consiste à déterminer la surface de frottement entre l’avant-bras et le
haut du corps durant la marche. De la peinture à l’eau a été utilisée et a été déposée sur la partie
intérieure de l’avant-bras d’un volontaire (Figure 2.7). Au cours de la marche, cette peinture
s’est déposée sur le vêtement. Après plusieurs essais de mouvement, nous avons ainsi pu
prendre des images de l’empreinte de la peinture sur le vêtement.
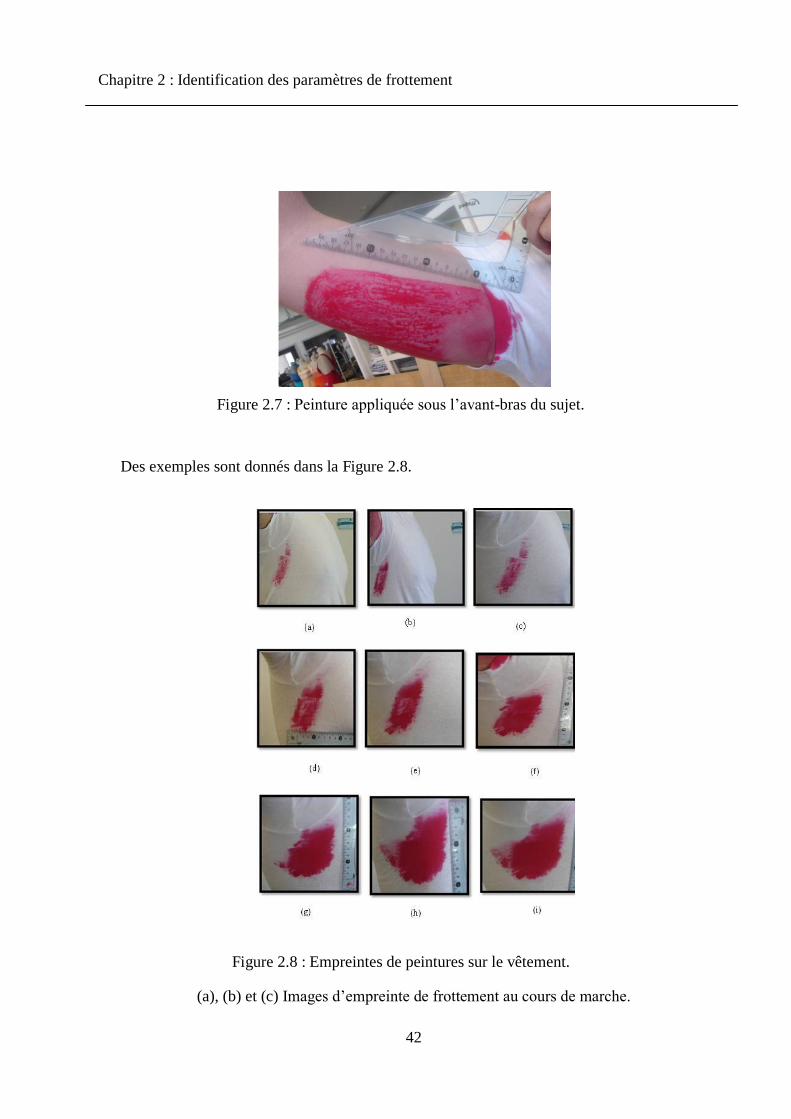
Chapitre 2 : Identification des paramètres de frottement
42
Figure 2.7 : Peinture appliquée sous l’avant-bras du sujet.
Des exemples sont donnés dans la Figure 2.8.
Figure 2.8 : Empreintes de peintures sur le vêtement.
(a), (b) et (c) Images d’empreinte de frottement au cours de marche.

Chapitre 2 : Identification des paramètres de frottement
43
(d), (e) et (f) Images d’empreinte de frottement au cours de jogging.
(g), (h) et (i) Images d’empreinte de frottement au cours de course.
Les empreintes ont été traitées par des logiciels [53, 54]. Grâce à ce traitement, nous avons
pu obtenir des valeurs des surfaces.
La figure 2.9 montre une surface obtenue lors d’un jogging.
Figure 2.9 : Empreinte de frottement lors d’un jogging. (a) Avant le traitement. (b) Après le
traitement.
Le traitement des images et la détermination des surfaces de frottement sont représentés par
les Figures (2.10, 2.11 et 2.12)

Chapitre 2 : Identification des paramètres de frottement
44
Figure 2.10 : Surfaces de frottement en mode marche
Figure 2.11 : Surfaces de frottement en mode jogging.

Chapitre 2 : Identification des paramètres de frottement
45
Figure 2.12 : Surfaces de frottement en mode course.
Les valeurs des surfaces obtenues sont reportées dans le tableau 2.4. Nous avons alors
déterminé la largeur maximale de l’empreinte de frottement par le même logiciel et par la
même démarche.
Tableau 2.4 : Surfaces de frottements. Surface
[dm²] S1 S2 S3 S4 S5 S6
Moyenne
Sm
CV%
Marche 0,75 0,83 0,79 0,8 0,96 1,00 0,85 10,78
Jogging 1,16 1,16 1,2 1,21 1,32 1,33 1,23 5,67
Course 1,56 1,58 1,6 1,62 1,8 1,84 1,66 6,63
Six essais ont été réalisés pour chaque cas. Les résultats obtenus montrent une dispersion
relativement importante, notamment dans le cas de la marche. La largeur maximale est montrée
sur la Figure 2.13. La Figure 2.14 présente les trois surfaces selon les trois allures d’essai
(marche, jogging, et course).

Chapitre 2 : Identification des paramètres de frottement
46
Figure 2.13 : Largeur maximale de l’empreinte de frottement sous le bras
Figure 2.14 : Empreinte des surfaces de frottements du bras.
S1 : surface de frottement en vitesse marche.
S2 : surface de frottement en vitesse jogging.
S3 : surface de frottement en vitesse course.
Nous retiendrons les données qui suivent pour la continuation de notre étude :
— Largeur maximale de l’empreinte de frottement 140 m = 140 mm,
— Surface de frottement sous le bras en marche S1= 0,009 m² =

Chapitre 2 : Identification des paramètres de frottement
47
— Surface de frottement sous le bras en jogging S2 = 0,012 m² =
— Surface de frottement sous le bras en course S3 = 0,017 m² = .
3.4. Identification de la pression de frottement
L’objet de cette partie consiste à déterminer la pression de frottement causée par l’avant-
bras sur le tronc durant la marche. Pour résoudre cette problématique, nous avons bénéficié des
résultats de plusieurs travaux de recherche entrepris dans notre laboratoire et portant sur
l’intégration de capteurs électriques au sein des matériaux fibreux (e–textiles) Kechiche [68] ,
Shafi [69].
Nous nous sommes notamment basés sur une étude menée par Yosouf [70] sur la
comparaison entre différents modes d’intégration de capteurs de pression ultrafins.
Pour pouvoir déterminer les pressions relatives à notre cas d’étude du frottement de
l’avant-bras avec le vêtement, nous avons fixé un capteur ultrafin sur le vêtement.
3.4.1 Choix du capteur
Nous avons retenu un capteur de pression du type Flexy force de pression (A401) [71] avec
une zone de détection circulaire de 25,4 mm de diamètre (voir sa fiche technique en annexe
n°4). Ce capteur de pression est un capteur mince (son épaisseur est de 0,21 mm), souple à
circuit imprimé, facile à installer sous le bras du sujet et sans gêne pour ses mouvements. Pour
assurer le bon contact de la sonde sur le tissu, deux types de fixation étaient envisageables : par
couture ou par collage. Un test de fixation selon l’un ou l’autre de ces deux montages a été
réalisé dans l’étude de Yosouf [70] sur le vêtement. Cela lui a permis une comparaison entre les
résistances moyennes des deux montages. Les données sont résumées dans le tableau 2.5 et sur
la Figure 2.15.

Chapitre 2 : Identification des paramètres de frottement
48
3.4.2 Choix du mode de fixation
Le choix du mode de fixation du capteur de pression par collage est basé sur les résultats
comparatifs de la résistance du capteur entre le montage par collage et le montage par couture.
Selon la Figure 2.15, la différence de sensibilité n’est pas très importante entre les deux
systèmes de fixation. Un montage par collage donne toutefois l’avantage de la facilité de la
manipulation et de la rapidité de fixation par rapport à la couture. À partir des valeurs de
résistance obtenues, on peut calculer la conductance du capteur (C=1/R)
Figure 2.15 : Comparaison de la conductance du capteur selon le mode de fixation.
3.4.3 Comparaison entre les deux types de montages du capteur
La comparaison des deux types de capteurs s’effectue par la comparaison des conductances
des deux montages (couture et collage) selon la Figure 2.15, on a :
(éq.2.2)
Avec : conductance du capteur
0
0,5
1
1,5
2
2,5
9,9
29,6
49,4
69,2
88,9
108,
7
128,
5
148,
2
168
187,
7
Con
du
cta
nce (
Sie
nen
s)
Pression gf/cm²
collage
couture

Chapitre 2 : Identification des paramètres de frottement
49
: Pression obtenue.
α : Pente, α = ΔC / ΔP
Les résultats sont indiqués dans le tableau 2.5, à partir de l’application de deux gammes de
pression.
Tableau 2.5 : Comparaison de la conductance du montage de capteur.
Pression (P)
(g.f/cm²)
Conductance (C)
Siemens Pente α
Collage Couture Collage Couture
Faible
gamme
P1=19,8 C1=0,09 C1=0,10 0,006 0,008
P2=29,6 C2=0,15 C2=0,18
Haute
gamme
P1=177,9 C1= 2,08 C1= 1,89 0,014 0,011
P2=187,7 C2= 2,22 C2= 2,00
Selon les résultats obtenus par Yosouf, la sensibilité du capteur diminue légèrement, que la
fixation soit réalisée par collage ou par couture.
3.4.4 Choix de l’emplacement de la fixation du capteur
L’étude précédente de la surface de frottement nous a permis de trouver l’endroit le plus
sollicité par la pression. Le capteur a donc été placé par collage dans cette zone de frottement.
Il se situe au-dessous de l’emmanchure selon la Figure 2.16. Le capteur est fermement collé
(colle liquide NEOPREN de Pattex) et les connecteurs ont été placés le long des coutures du
vêtement du volontaire pour être reliés à une carte d’acquisition électronique, liée à son tour à
un ordinateur sur lequel est installé le logiciel LabWIEW [72].
Figure 2.16 : Collage d’un capteur de pression.

Chapitre 2 : Identification des paramètres de frottement
50
Nous avons ensuite mesuré la pression appliquée sur cette zone lors des mouvements de
l’avant-bras.
3.4.5 L’étalonnage
L’étalonnage va consister à relier la variation de l’impédance du capteur à la pression
appliquée sur ce dernier par cm de l’avant-bras. Pour cela, nous utilisons une gamme de masse
[20-250] g en augmentant de 10 g pour chaque essai et en retenant la valeur moyenne de la
tension. Le logiciel LabWIEW va nous permettre d'acquérir différents types de signaux de
sortie (résistance, courant, tension, puissance) et va nous permettre de choisir l’intervalle de
mesure. Dans cette étude l’intervalle utilisé pour la tension est de (0-250) mV et le temps du
signale (0-10) s. Les pressions sont calculées et affichées dans le tableau 2.7. La Figure 2.17
présente la courbe d’étalonnage obtenue.
Figure 2.17 : Courbe d’étalonnage du capteur
La pression est calculée par la formule
(éq.2.3)
y = 8,1788x - 1,598 R² = 0,9833
0
5
10
15
20
25
30
35
40
0 1 2 3 4 5 6
Ten
sio
n [
mv]
Pression [kPa]

Chapitre 2 : Identification des paramètres de frottement
51
Avec pression en Pa,
force appliquée en N,
surface de la zone de détection. Pour ce capteur, = 5,07 x 10-4
m²
Plusieurs mesures ont été pratiquées :
— par mesure statique pour la valeur moyenne de la résistance de montage (l’impédance)
en utilisant un multimètre ;
— en dynamique pour la valeur moyenne de la tension de sortie à partir d’un logiciel
spécifique d’acquisition des données (LabVIEW signal express) [59].
Les valeurs recueillies au cours de l’étude d’étalonnage du capteur ont permis de relever la
tension moyenne en fonction des pressions appliquées. Les résultats des tests ont été effectués
pour obtenir les valeurs de pression appliquée sur le tissu pour chaque type de mouvement. Ces
résultats sont présentés dans le tableau 2.7.
Tableau 2.6. Les résultats de la tension moyenne délivrée par le capteur lors des différents
mouvements.
Tableau 2.6 : Tension moyenne
Mouvement Tension moyenne (mV)
essai 1 essai 2 essai 3 essai 4 moyenne CV %
Marche (2 km/h) 10,3 12,7 13,3 12,9 12,3 9,55
Jogging (7 km/h) 17,5 19,5 18,2 18,5 18,4 3,9
Course (9 km/h) 26,1 32,4 33,3 32,2 31,0 9,22
3.4.6 Les masses correspondant aux pressions de frottement
De la courbe d’étalonnage en figure 2.17 les tensions moyennes obtenues par les essais du
mouvement correspondent aux pressions mentionnées dans le tableau 2.7.

Chapitre 2 : Identification des paramètres de frottement
52
Tableau 2.7 : La pression correspondante à chaque type du mouvement.
Mouvement Marche (2 km/h) Jogging (7 km/h) Course(9 km/h)
Tension moyenne (mV) 12,3 18,4 31
Pression
[kPa] 1,7 2,4 3,9
4. Conclusion
Dans ce chapitre, nous avons identifié tout d’abord les conditions expérimentales de
l’enregistrement vidéo de sujets sur un tapis de course avec les trois allures du déplacement :
marche, jogging et course. Nous avons ensuite présenté les différentes démarches d’analyse des
séquences du film enregistré grâce auxquelles nous avons déterminé les paramètres suivants :
— Vitesses linéaires du balancement du bras dans le cas de la marche, du jogging et de la
course,
— Amplitude de ce balancement,
— Surfaces du frottement,
— Pressions appliquées par l’avant-bras sur le corps.
L’ensemble de ces conditions est reporté dans les tableaux (2.3, 2.4, et 2.7).
Dans le chapitre suivant, nous utiliserons ces données expérimentales pour les calculs de
dimensionnement des pièces mécaniques nécessaires à la conception du dispositif expérimental
que nous envisageons.

53
CHAPITRE 3
CONCEPTION ET RÉALISATION
DE L’INSTRUMENT

Chapitre 3 : Conception et réalisation de l’instrument
54
1. Introduction
Après l'étude et la caractérisation du mouvement de l’avant bras d'un individu en
déplacement, nous allons concevoir un dispositif expérimental de simulation de ce mouvement
pour l'étude du son généré par le frottement des étoffes sur elles-mêmes. Le principe du
fonctionnement de cet instrument est basé sur le contact de deux échantillons textiles de même
nature (Figure 3.1). Le premier échantillon recouvre une plaque en gel de silicone qui simule la
peau humaine. Il est fixé et tendu sur une plaque en bois par deux bagues de serrage en
plastique. Le deuxième échantillon est mobile. Il est fixé sur un support dont le mouvement de
balayage est similaire du mouvement de l’avant bras sur l'échantillon fixe. Ce mouvement va
générer le son du frottement.
Figure 3.1 : Supports échantillons mobile et fixe.
1- Plaque en bois. 2- Plaque en silicone, 3- Bagues de serrages en plastique, 4- Tissus
5- Porte échantillon mobile.
Les exigences et les principales spécifications techniques pour le développement de cet
appareil sont les suivantes :
La manipulation et la fixation des échantillons doivent être simples,
Le mécanisme assurant le mouvement du frottement doit être le moins encombrant
possible et le plus silencieux possible,
L'isolation des bruits extérieurs doit être la plus rigoureuse possible,

Chapitre 3 : Conception et réalisation de l’instrument
55
La partie d'enregistrement du frottement (position du microphone) doit être isolée de
la partie mécanique,
La chaîne d'enregistrement doit être simple,
L'ensemble doit être stable après son étalonnage (étalonnage du microphone) sur de
longues périodes de temps d'enregistrement.
2. Conception de l'instrument expérimental
L'étude du mouvement de l’avant bras dans le chapitre précédant, nous a permis d'avoir des
données expérimentales sur la largeur maximale de frottement ) et les différentes surfaces
de frottement. Ces données seront utilisées dans ce chapitre pour les calculs nécessaires au
dimensionnement des pièces du système mécanique qui a pour objectif de reproduire le
balancement de l’avant bras avec ces différentes surfaces de frottement.
Pour rappel, les données expérimentales obtenues dans le chapitre précédent sont les
suivantes :
Largeur maximale de l'empreinte de frottement 140 m ,
Surface de frottement sous le bras en marche S1= 0,009 m² ,
Surface de frottement sous le bras en jogging S2 = 0,012 m² ,
Surface de frottement sous le bras en course S3 = 0,017 m².
La conception de notre instrument sera basée sur l'étude des trois parties principales
suivantes
la partie mécanique,
la partie isolation,
la partie d'enregistrement instrumental.
Pour la réalisation de ce système, nous avons opté pour un système similaire au dispositif
d'essuie-glace, illustré par le schéma cinématique de la Figure 3.2.

Chapitre 3 : Conception et réalisation de l’instrument
56
Figure 3.2 : Présentation cinématique du mouvement du porte-échantillon mobile.
: Largeur maximale de l'empreinte de frottement. Largeur de porte-échantillon
mobile.
D : Largeur maximale de balayage de l'axe (O'O").
2.1. Calcul de l'angle de balayage
Le calcul de l'angle de balayage (α) nous permettra à dimensionner le porte échantillon
mobile. La Figure 3.2, présente une partie de la pièce du support d’échantillon mobile. Pour
cela nous procédons par une démarche de calcul géométrique de la largeur maximale de
balayage de l’axe (O'O") (D). Après cela, on calcule l'angle (α) du mouvement de cet axe, qui
sera utilisé pour définir les longueurs utiles pour un porte-échantillon ayant une largeur
= 24 mm). Ce dernier est présenté dans la Figure 3.3.

Chapitre 3 : Conception et réalisation de l’instrument
57
Figure 3.3 : Porte- échantillon mobile
2.2. Calcul de la largeur de balayage de l'axe (O'O")
Le mouvement de l'axe (O'O") est présenté par la Figure 3.2.
Selon le schéma :
(éq.3.1)
(éq.3.2)
De la formule (éq.3.1) et (éq.3.2) On en déduit :
(éq.3.3)
(éq.3.4)
On a: = 140 mm, = 24 mm
Des formules (éq.3.3) et (éq.3.4), on obtient ).

Chapitre 3 : Conception et réalisation de l’instrument
58
2.3. Calcul de l'angle de balayage de l'axe (O"O')
Nous avons pris comme longueur de cet axe ( ). Selon la Figure 3.2, l'angle
de balayage est égal à 2α.
(éq.3.5)
Par l'application de la formule (éq.3.5), on obtient la valeur de (α)
D’où α = 9°
L'angle de balayage de l'axe de notre instrument sera donc 2α = 18°
2.4. Calcul des dimensions des porte-échantillons
2.4.1 Porte-échantillon immobile
Pour assurer le serrage et la tension de l'échantillon, nous avons adapté un cadre de
broderie en plastique utilisées dans la fixation des étoffes pour machine de broderie. Les
bagues sont de forme ellipsoïdale. Les grandeurs des deux diamètres (D, d) de ces bagues
assemblées entre elles sont respectivement égales à (300 et 365 mm). Ces dimensions nous ont
permis de fixer une des deux bagues sur une plaque rectangulaire de dimension A = 380 mm et
B = 320 mm.
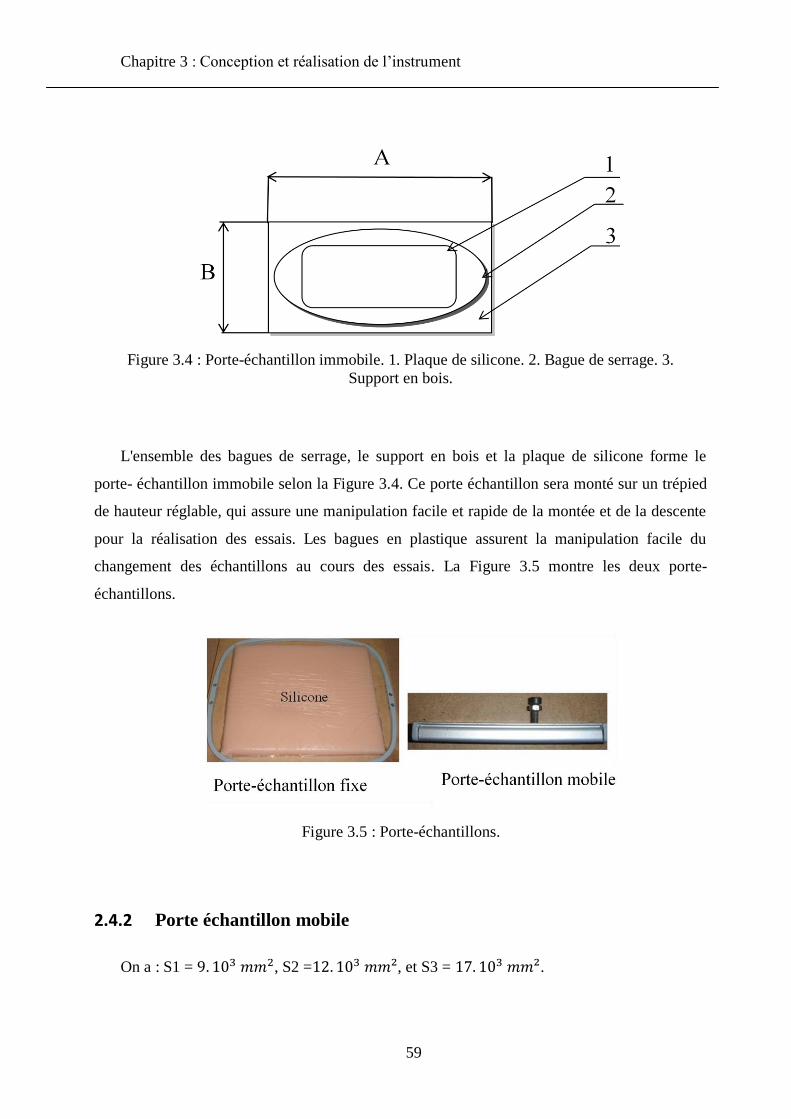
Chapitre 3 : Conception et réalisation de l’instrument
59
Figure 3.4 : Porte-échantillon immobile. 1. Plaque de silicone. 2. Bague de serrage. 3.
Support en bois.
L'ensemble des bagues de serrage, le support en bois et la plaque de silicone forme le
porte- échantillon immobile selon la Figure 3.4. Ce porte échantillon sera monté sur un trépied
de hauteur réglable, qui assure une manipulation facile et rapide de la montée et de la descente
pour la réalisation des essais. Les bagues en plastique assurent la manipulation facile du
changement des échantillons au cours des essais. La Figure 3.5 montre les deux porte-
échantillons.
Figure 3.5 : Porte-échantillons.
2.4.2 Porte échantillon mobile
On a : S1 = , S2 = , et S3 = .

Chapitre 3 : Conception et réalisation de l’instrument
60
La Figure 3.6 représente la surface S' du frottement du porte-échantillon (P) à partir de
l'axe (O' O") est égale à la surface de frottement du bras sans la surface du porte échantillon
(P).
S'= S- (24 x L) avec S est la surface du frottement du bras sur le tronc.
Figure 3.6 : Surface S' du frottement de l'axe du porte-échantillon (P)
Par la formule générale de calcul de l'aire A d'un secteur angulaire α et d'un rayon r,
L'aire d'un secteur angulaire est :
(éq.3.6)
Considérant :
- ( SR' ) la surface obtenue du secteur angulaire ( 2 α ) et du rayon R',
- ( SR" ) la surface obtenue du secteur angulaire (2 α ) et du rayon R",
- ( S' ) la surface obtenue par ( SR' ) ∩ ( SR" ).
Suivant la Figure 3.6, c’est une partie de la surface du secteur angulaire de (2α). Pour
obtenir les surfaces de frottement de notre appareil selon les trois surfaces de frottement,
obtenues auparavant, et pour une manipulation rapide de placement de notre porte-échantillon

Chapitre 3 : Conception et réalisation de l’instrument
61
mobile et de l'échantillon, avec des dimensions peu encombrantes pour notre mécanisme, nous
avons choisi de fabriquer un porte-échantillon avec une largeur de 24 (mm). Les calculs qui
vont suivre, nous permettront de calculer les différentes longueurs de pièces nécessaires pour
assurer un frottement d'aire équivalent à l'aire de frottement du bras. Par cette étude
cinématique, nous arrivons à trouver la longueur de porte-échantillon qui permet de reproduire
la surface frottée dans les trois modes de mouvement.
D'après la Figure 3.6, les surfaces SR', SR", et S' du secteur angulaire de 2α seront
obtenues selon les formules suivantes :
(éq.3.7)
(éq.3.8)
(éq.3.9)
La surface S'est calculée selon la formule (éq. 3.9)
(éq.3.10)
On remplaçant SR' et SR" dans la formule
(éq.3.11)
(éq.3.12)
A partir de l'équation (éq. 3.9), on remplace R" dans l'équation (éq.3.12)
(éq.3.13)
La surface du frottement totale S qui présente les surfaces du frottement réel sous le bras,
sera présentée par la formule suivante :
(éq.3.14)
Selon l'équation (éq.3.14), S' sera suivant la formule :

Chapitre 3 : Conception et réalisation de l’instrument
62
(éq.3.15)
De l'équation (éq.3.15), on remplace S' dans l'équation (éq.3.13).
(éq.3.16)
De l'équation (éq.3.16) on aura la surface S égale à :
(éq.3.17)
Avec R'(372 mm) et α (9°5') On remplace dans la formule (éq.3.17) on aura:
(éq.3.18)
La formule (éq.3.17) est une équation du 2ème
degré, dont la résolution nous permettra de
trouver les longueurs du porte-échantillon selon les surfaces de balayage nécessaires.
1) Pour .
On aura :
Pour une surface de frottement , on a
Pour une surface de frottement S2 = , on a
Pour une surface de frottement , on a
Les dimensions du porte-échantillon mobile (Figure 3.7) sont présentées dans le tableau 3.1.

Chapitre 3 : Conception et réalisation de l’instrument
63
Figure 3.7 : Porte-échantillon mobile
Tableau 3.1 : Dimensions de l'emporte pièce mobile selon les surfaces de frottement
Mouvement Marche 9 24 69
Jogging 12 24 95
Course 17 24 144
2.5. Calcul du positionnement des axes du mécanisme
Pour assurer le mouvement du balayage de l'axe (O' O") avec un angle de 2α = 18°, nous
devons réaliser un mécanisme peu encombrant et peu bruyant. Nous avons adapté un système
de transmission de mouvement de rotation d'un disque de rayon R, portant une pièce en Téflon
à une distance de C du centre de rotation du disque. Cette pièce est montée sur un axe
perpendiculaire au disque, ce qui assure la rotation de cette pièce avec la rotation du disque. La
pièce en Téflon est traversée par une tige en acier lisse qui coulisse librement à travers cette
pièce. L'axe de la tige en acier est lié à l'axe de balayage au point d'articulation O'.

Chapitre 3 : Conception et réalisation de l’instrument
64
Figure 3. 8 : Schéma cinématique du mécanisme de mouvement mécanique.
Par l'étude cinématique du mouvement présenté par la Figure 3.7, nous calculerons le rayon
R du disque qui assure le mouvement de rotation et la distance C de l'axe de la pièce de rayon r,
sur laquelle sera montée la pièce en Téflon. Nous fixons l'entraxe A à 240 mm.
(éq.3.19)
On déduit de la formule (éq. 3.19)
(éq.3.20)
Avec , on aura et
Selon la Figure 3.10 on a :
(éq.3.21)
On appliquant (éq.3.21)

Chapitre 3 : Conception et réalisation de l’instrument
65
3. Description fonctionnelle de système expérimental
La première étape du processus de conception du système expérimental se distingue par
l’analyse des résultats obtenus dans le chapitre précédent. Pour nous faciliter la compréhension
du système à concevoir, nous l'avons présenté sous forme des diagrammes structurels. Cela
nous permettra la conception par parties essentielles de la construction finale.
3.1. Description générale
Le balayage sera assuré par un système mécanique alimenté par une source d'énergie
électrique. Le système mécanique permettra de générer le son provoqué par le frottement d’une
étoffe sur elle-même qui sera enregistré. La Figure 3.9 présente le diagramme de la structure
générale de l'instrument.
Figure 3.9 : Diagramme de la structure générale de l'instrument expérimental
En se basant sur ce diagramme, on observe que la partie qui demande plus de réflexion, est
la partie mécanique. Elle sera mise en place de façon à avoir un mouvement de balayage d'une
surface de tissu mobile sur une surface fixe du même tissu.
Son généré
par frottement
Frottement
surfacique du tissu
Énergie
électrique
Partie
enregistrement
Partie
mécanique
Mouvement
de balayage
Instrument
expérimental

Chapitre 3 : Conception et réalisation de l’instrument
66
3.2. Description de la partie mécanique
La partie mécanique assure la transformation de l'énergie électrique en mouvement
mécanique grâce à un moteur électrique à courant continu. Ce type de moteur est envisageable
dans la mesure où les vitesses de frottement ne sont pas très élevées. L’énergie mécanique sera
transmise par la structure définie dans les paragraphes précédents. L’ensemble peut être
présenté par le diagramme structurel de la Figure 3.10.
Figure 3.10 : Diagramme de la structure mécanique de l'instrument expérimental
La partie d'enregistrement, que nous présentons sous forme d'un diagramme structurel
selon la Figure 3.11 est constituée d’un ensemble d'appareillages d'enregistrement acoustique.
3.3. Description de la partie enregistrement

Chapitre 3 : Conception et réalisation de l’instrument
67
La partie enregistrement est réalisée grâce à un ensemble de matériel de Brüel et Kjaer
(microphone type 4190, pré-amplificateur type 2669, et amplificateur type 2606). La seule
partie du système acoustique qui sera fabriquée spécifiquement dans le cadre de cette étude est
l'enceinte acoustique. Elle sera le dernier élément à être mis en place pour finaliser le système
de mesure. Elle sera testée de façon expérimentale pour s’assurer de ses caractéristiques
notamment en terme d’isolation.
Figure 3.11 : Diagramme de la structure d'enregistrement de l'instrument expérimental.
Chapitre 3 : Conception et réalisation de l’instrument
68
3.4. Présentation de la partie mécanique
La conception et la réalisation de ce mécanisme a suivi plusieurs étapes. La première étape,
le calcul et le dimensionnement des pièces maitresses qui a été présenté dans les paragraphes
précédents.
La seconde étape a consisté à dessiner l’ensemble des éléments du mécanisme sur
Pro.ENGINEER [73]. Les Figures (3.12, 3.13, 3.14, et 3.15) présentent quelques pièces de ce
mécanisme qui ont été réalisées à l’atelier mécanique du laboratoire. La troisième étape a été le
montage du système et son positionnement dans l’enceinte acoustique développée. Plusieurs
phases d’amélioration ont suivi afin de simplifier et d’améliorer le système suite à des premiers
séries d’essais. La Figure 3.16 présente les améliorations faites sur les mécanismes mécaniques
de l’instrument.
3.5. Fabrication des composantes mécanique
Les pièces usinées par nos soins sont majoritairement en alliage d'aluminium car elles sont
plus faciles à usiner et peu coûteuses. Les bagues sont en bronze et les tiges en acier.
L'ensemble du système mécanique est monté sur socle en profilé 40 X 40, ayant à son extrémité
quatre pieds réglables avec des embouts en caoutchouc afin d’amortir les vibrations du moteur
et d’éviter la transmission des vibrations mécaniques par le sol. La pièce de couplage est en
Téflon. L’ensemble de la conception du système a été réalisé afin de minimiser les bruits
parasites dûs au mécanisme.

Chapitre 3 : Conception et réalisation de l’instrument
69
Figure 3. 12 : Plateau en aluminium

Chapitre 3 : Conception et réalisation de l’instrument
70
Figure 3. 13 : Disque en aluminium

Chapitre 3 : Conception et réalisation de l’instrument
71
Figure 3. 14 : Disque support du porte échantillon mobile.

Chapitre 3 : Conception et réalisation de l’instrument
72
Figure 3. 15 : Première partie mécanique
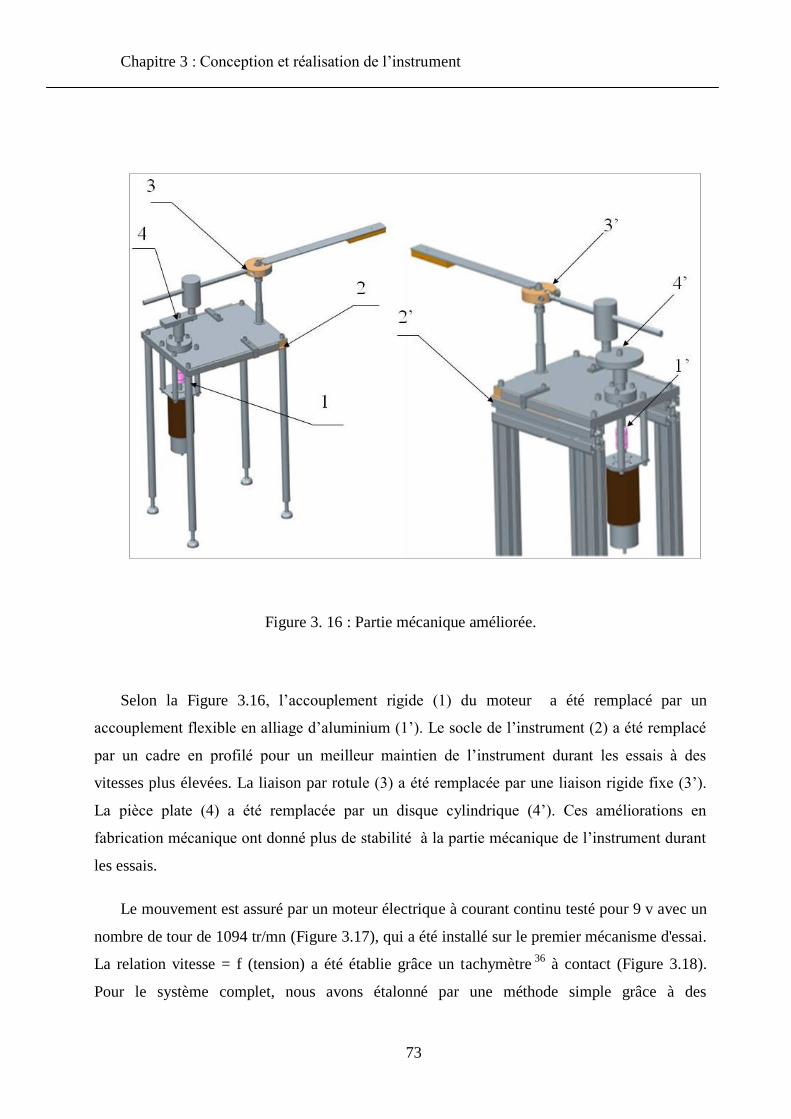
Chapitre 3 : Conception et réalisation de l’instrument
73
Figure 3. 16 : Partie mécanique améliorée.
Selon la Figure 3.16, l’accouplement rigide (1) du moteur a été remplacé par un
accouplement flexible en alliage d’aluminium (1’). Le socle de l’instrument (2) a été remplacé
par un cadre en profilé pour un meilleur maintien de l’instrument durant les essais à des
vitesses plus élevées. La liaison par rotule (3) a été remplacée par une liaison rigide fixe (3’).
La pièce plate (4) a été remplacée par un disque cylindrique (4’). Ces améliorations en
fabrication mécanique ont donné plus de stabilité à la partie mécanique de l’instrument durant
les essais.
Le mouvement est assuré par un moteur électrique à courant continu testé pour 9 v avec un
nombre de tour de 1094 tr/mn (Figure 3.17), qui a été installé sur le premier mécanisme d'essai.
La relation vitesse = f (tension) a été établie grâce un tachymètre 36
à contact (Figure 3.18).
Pour le système complet, nous avons étalonné par une méthode simple grâce à des
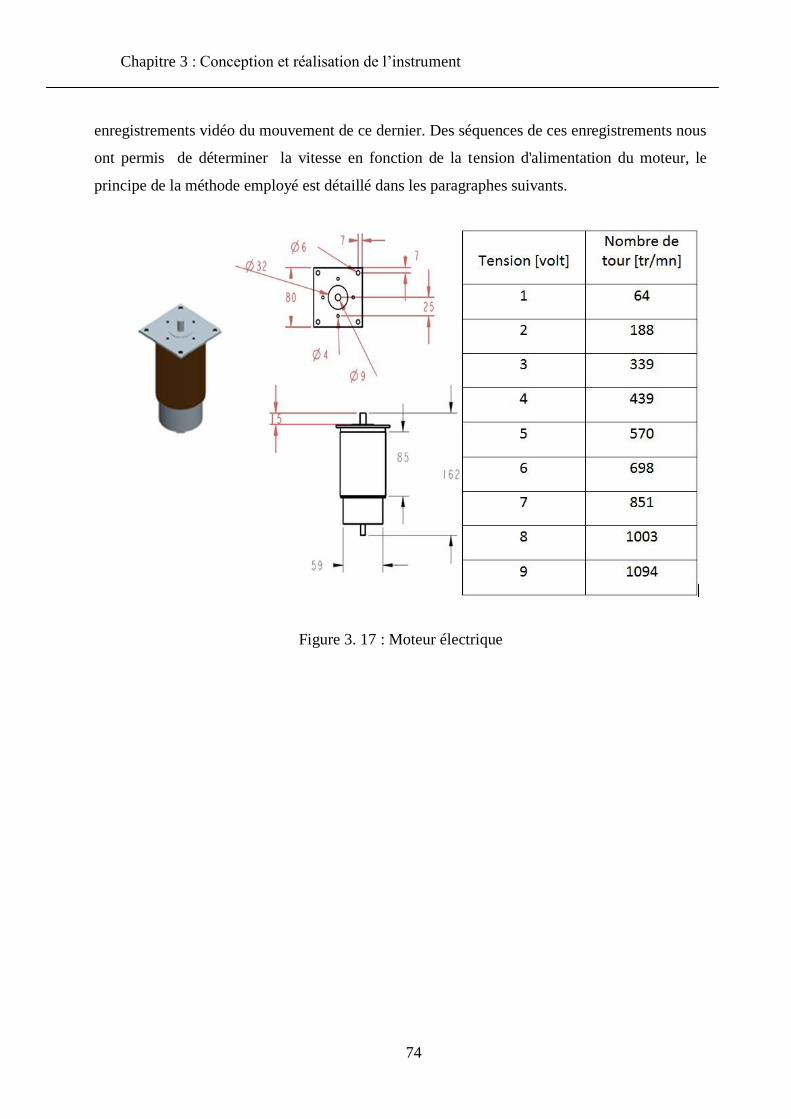
Chapitre 3 : Conception et réalisation de l’instrument
74
enregistrements vidéo du mouvement de ce dernier. Des séquences de ces enregistrements nous
ont permis de déterminer la vitesse en fonction de la tension d'alimentation du moteur, le
principe de la méthode employé est détaillé dans les paragraphes suivants.
Figure 3. 17 : Moteur électrique

Chapitre 3 : Conception et réalisation de l’instrument
75
Figure 3. 18 : Vitesse du moteur (tr/mn) en fonction de la tension.
4. Étalonnage
L'étalonnage nous permettra à trouver, d'une façon pratique, le réglage du générateur de
tension avec les vitesses des essais du frottement obtenues dans le chapitre précédent. Pour ce
faire, nous avons filmé l'extrémité du porte échantillon en mouvement, après l'avoir marqué par
un marqueur (Figure 3.19). La vitesse du mouvement est pilotée par l'alimentation en tension
du moteur. Nous avons procédé par augmentation progressive de la tension et, pour chaque
augmentation nous avons filmé le mouvement. Le film est traité pour une distance du balayage
du porte-échantillon (Figure 3.20). Les vitesses sont calculées et présentées dans le tableau 3.3,
à partir des temps qui sont présentés dans le tableau 3.2 pour une distance parcourue de 0,122
m du point du marqueur fixé à l’extrémité de la règle du porte échantillon. Trois essais sont
réalisés pour chaque valeur de tension.
0
200
400
600
800
1000
1200
1 2 3 4 5 6 7 8 9
Vit
esse
du m
ote
ur
[tr/
mn]
Tension [volt]

Chapitre 3 : Conception et réalisation de l’instrument
76
Figure 3. 19 : Mouvement du porte-échantillon. (a) marqueur. (B) Déplacement.
Figure 3. 20 : Mouvement du porte-échantillon. (a) correspond (2,58 volt), (b) correspond
(2,68 volt).

Chapitre 3 : Conception et réalisation de l’instrument
77
Tableau 3. 2 : Temps du mouvement du porte-échantillon pour une distance de 0,122 m
Tension [Volt] Essai1
[s]
Essai2
[s]
Essai 3
[s]
Moyenne
[s] Ecart-type CV(%)
2,41 0,354 0,313 0,336 0,334 2,06E-02 6
2,48 0,284 0,298 0,29 0,291 7,02E-03 2
2,51 0,232 0,24 0,251 0,241 9,54E-03 4
2,58 0,214 0,197 0,199 0,203 9,29E-03 5
2,61 0,189 0,18 0,188 0,186 4,93E-03 3
2,68 0,168 0,172 0,187 0,176 1,00E-02 6
2,71 0,164 0,171 0,176 0,170 6,03E-03 4
2,78 0,168 0,17 0,164 0,167 3,06E-03 2
2,81 0,142 0,146 0,147 0,145 2,65E-03 2
2,88 0,139 0,135 0,141 0,138 3,06E-03 2
2,91 0,135 0,133 0,129 0,132 3,06E-03 2
2,98 0,118 0,124 0,133 0,125 7,55E-03 6
Tableau 3. 3 : Vitesse linéaire du mouvement du porte-échantillon.
Tension [Volt] Essai1
[m/s]
Essai 2
[m/s]
Essai3
[m/s]
Moyenne
[m/s] Ecart-type CV(%)
2,41 0,34 0,39 0,36 0,36 2,52E-02 7
2,48 0,43 0,41 0,42 0,42 1,00E-02 2
2,51 0,53 0,51 0,49 0,51 2,00E-02 4
2,58 0,57 0,62 0,61 0,60 2,65E-02 4
2,61 0,65 0,68 0,65 0,66 1,73E-02 3
2,68 0,73 0,71 0,65 0,70 4,16E-02 6
2,71 0,74 0,71 0,69 0,71 2,52E-02 4
2,78 0,73 0,72 0,74 0,73 1,00E-02 1
2,81 0,86 0,84 0,83 0,84 1,53E-02 2
2,88 0,88 0,9 0,87 0,88 1,53E-02 2
2,91 0,9 0,92 0,95 0,92 2,52E-02 3
2,98 1,03 0,98 0,92 0,98 5,51E-02 6

Chapitre 3 : Conception et réalisation de l’instrument
78
La Figure 3.20, présente le graphe d'étalonnage de la vitesse en fonction de l'alimentation
en volt du moteur.
Figure 3.21 : Graphe d'étalonnage
D'après le graphe de la Figure 3.20, les valeurs du réglage du générateur de tension qui
correspondent aux vitesses du frottement relevées pour les différentes modes de déplacement
sont présentées dans le tableau 3.4.
Tableau 3.4 : Voltages correspondant aux vitesses du mouvement.
Mode Marche Jogging Course
Alimentation [volt] 2,6 2,9 3,6
Vitesse [m/s] 0,56 0,94 1,65
5. L'enceinte acoustique
Pour séparer physiquement la partie mécanique et aussi l’isoler d’un point de vue
acoustique de la partie d'enregistrement, nous avons prévu d'installer le microphone dans une
enceinte avec une isolation phonique21
. D'après la littérature [74], les ondes sonores dans un
espace clos subissent des réflexions qui sont à l'origine de deux phénomènes acoustiques
majeurs : l'effet de l'écho et l'effet de la résonance. Cela signifie que le microphone à l'intérieur
de l'enceinte acoustique ne sera pas dans un environnement passif : chaque élément de surface à
l'intérieure de l'enceinte, reçoit, modifie et réémet les ondes sonores. C'est un environnement
y = 1,0594x - 2,1625 R² = 0,9726
0
0,2
0,4
0,6
0,8
1
1,2
1,5 1,7 1,9 2,1 2,3 2,5 2,7 2,9
Vit
esse
mo
yen
ne[
m/s
]
Tension [volt]

Chapitre 3 : Conception et réalisation de l’instrument
79
actif qui influe sur le bruit du frottement à enregistrer. La réverbération32
(ou écho) et la
résonance (ou ondes stationnaires) peuvent provoquer des perturbations dans la zone
d'enregistrement du microphone. Pour cela, deux enceintes de dimensions différentes
successivement réalisées ont fait l'objet d'une étude acoustique. Des essais d'atténuation dans
une chambre réverbérante ont été menés, afin de choisir l'enceinte qui s'adapte au mieux à nos
essais d'enregistrement du frottement des échantillons textiles.
5.1. Première enceinte acoustique
La première enceinte acoustique que nous avons développée (Figure 3.21) est une caisse
parallélépipédique (400 x 400 x 700 ) construite en bois aggloméré d’épaisseur 10 mm.
L’isolation acoustique est réalisée par une mousse alvéolaire en polyuréthane, collée sur toutes
les parois intérieures de la caisse y compris sur la porte. Chaque couche est de 30 mm
d’épaisseur (fiche technique en annexe). Une fente de dimensions de (80 x 10 mm²) a été
réalisée sur la paroi arrière au milieu de la caisse afin de permettre l'introduction du porte-
échantillon mobile à l'intérieur de l’enceinte acoustique. La position du porte-échantillon à
l’intérieur de l’enceinte conduit à séparer le volume intérieur en deux compartiments comme on
peut le voir sur la Figure 3.23.
Figure 3.22 : Enceinte acoustique

Chapitre 3 : Conception et réalisation de l’instrument
80
Figure 3.23 : Enceinte acoustique avec isolation.1-premier compartiment.2-deuxième
compartiment
Les dimensions de la partie intérieure de l'enceinte acoustique sont présentées dans le
tableau 3.5 ainsi que les dimensions de chacun des deux compartiments.
Tableau 3. 5 : Dimensions des deux compartiments de l’enceinte acoustique.
Dimension [mm] Compartiment (1) Compartiment (2) Total
L [mm] 340 340 680
l [mm] 350 350 700
H [mm] 220 390 610
Volume [m3] 0,026 0,046 0,072
5.1.1 Calcul théorique de la résonance de l’enceinte acoustique
Pour les milieux clos [74], les premiers modes de résonance se calculent avec la relation
suivante
(éq.3.22)
Avec :
la fréquence de la résonance, C la célérité du son dans l'air (340 m/s), (a, b et c) sont des
entiers, (L, l, et H) dimensions de l’enceinte en mètre.
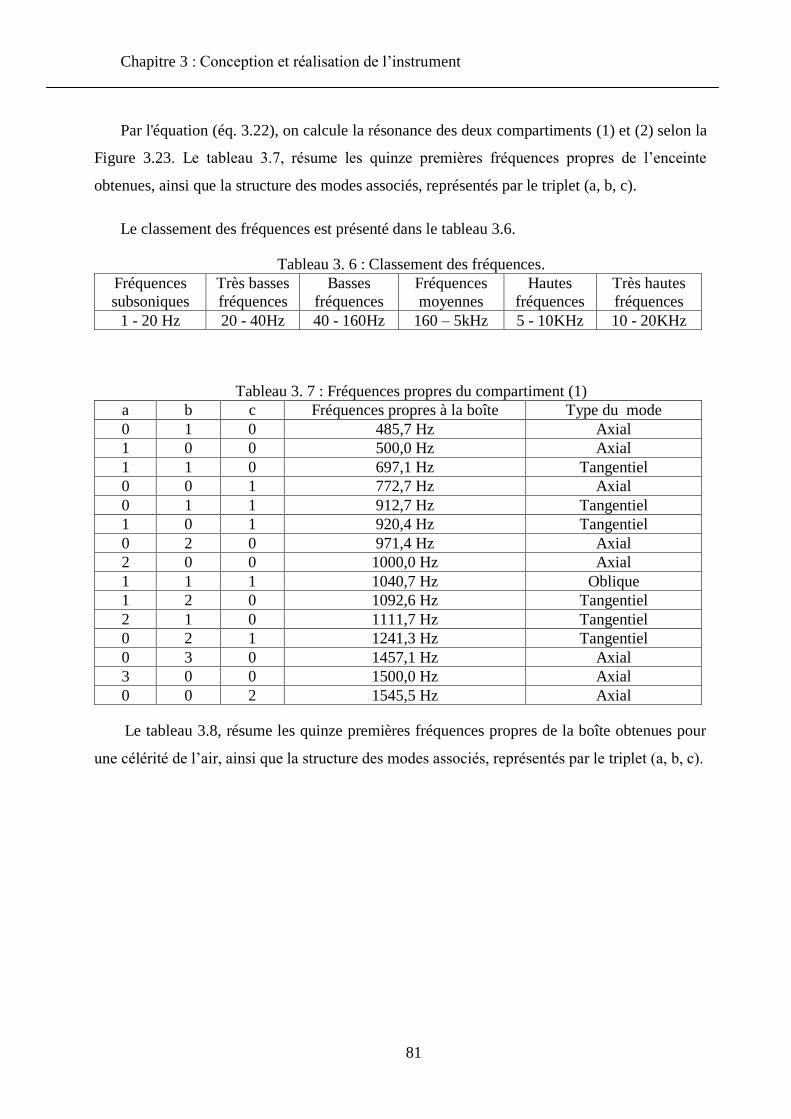
Chapitre 3 : Conception et réalisation de l’instrument
81
Par l'équation (éq. 3.22), on calcule la résonance des deux compartiments (1) et (2) selon la
Figure 3.23. Le tableau 3.7, résume les quinze premières fréquences propres de l’enceinte
obtenues, ainsi que la structure des modes associés, représentés par le triplet (a, b, c).
Le classement des fréquences est présenté dans le tableau 3.6.
Tableau 3. 6 : Classement des fréquences.
Fréquences
subsoniques
Très basses
fréquences
Basses
fréquences
Fréquences
moyennes
Hautes
fréquences
Très hautes
fréquences
1 - 20 Hz 20 - 40Hz 40 - 160Hz 160 – 5kHz 5 - 10KHz 10 - 20KHz
Tableau 3. 7 : Fréquences propres du compartiment (1)
a b c Fréquences propres à la boîte Type du mode
0 1 0 485,7 Hz Axial
1 0 0 500,0 Hz Axial
1 1 0 697,1 Hz Tangentiel
0 0 1 772,7 Hz Axial
0 1 1 912,7 Hz Tangentiel
1 0 1 920,4 Hz Tangentiel
0 2 0 971,4 Hz Axial
2 0 0 1000,0 Hz Axial
1 1 1 1040,7 Hz Oblique
1 2 0 1092,6 Hz Tangentiel
2 1 0 1111,7 Hz Tangentiel
0 2 1 1241,3 Hz Tangentiel
0 3 0 1457,1 Hz Axial
3 0 0 1500,0 Hz Axial
0 0 2 1545,5 Hz Axial
Le tableau 3.8, résume les quinze premières fréquences propres de la boîte obtenues pour
une célérité de l’air, ainsi que la structure des modes associés, représentés par le triplet (a, b, c).

Chapitre 3 : Conception et réalisation de l’instrument
82
Tableau 3. 8 : Fréquences propres du compartiment (2)
a b c Fréquences propres à l’enceinte
acoustique Type du mode
0 0 1 435,9 Hz Axial
0 1 0 485,7 Hz Axial
1 0 0 500,0 Hz Axial
0 1 1 652,6 Hz Tangentiel
1 0 1 663,31 Hz Tangentiel
1 1 0 697,1 Hz Tangentiel
1 1 1 822,1 Hz Oblique
0 0 2 871,8Hz Axial
0 2 0 971,4Hz Axial
2 0 0 1000,0Hz Axial
0 2 1 1064,7 Hz Tangentiel
1 2 0 1092,6Hz Tangentiel
2 1 0 1111,7 Hz Tangentiel
1 1 2 1116,2Hz Oblique
1 2 1 1176,3 Hz Oblique
À partir de ces résultats, et selon le tableau 3.6 du classement des fréquences, on peut
remarquer que les fréquences de résonance de cette enceinte sont situées dans la bande des
fréquences moyennes. Le porte-échantillon fixe divise l’enceinte en deux compartiments et cela
influe clairement sur les ondes stationnaires. Cependant, elles restent toujours dans le domaine
des moyennes fréquences. Pour diminuer l'influence de ces fréquences sur l'enregistrement du
microphone. Il faut décaler les fréquences dans des bandes des basses fréquences ou les
diminuer. Étant donné que le domaine audible n’est pas situé dans cette bande de fréquence, la
résonance ne va pas affecter les enregistrements des frottements des tissus. Pour cela nous
allons augmenter la dimension de l’enceinte.
5.2. Deuxième enceinte acoustique
La seconde enceinte acoustique (Figure 2.24) est une caisse parallélépipédique construite
de la même matière en bois aggloméré d’épaisseur 10 mm, mais de taille supérieure (880 x880
x 1500 mm³). Comme pour l’enceinte précédente, l’isolation acoustique est réalisée par une
mousse en polyuréthane, collée sur toutes les parois intérieures de la caisse et sur la porte.
Chaque couche est de 30 mm d’épaisseur. Une fente de dimensions (80 x 10 mm²) dimensions

Chapitre 3 : Conception et réalisation de l’instrument
83
identiques à celle de la précédente enceinte a été réalisée sur la paroi arrière au milieu de la
caisse afin de permettre l'introduction du porte échantillon mobile à l'intérieure de la caisse.
Figure 3. 24 : Enceinte acoustique.
Les dimensions de la partie intérieure de l'enceinte acoustique sont présentées dans le
tableau 3.9. Le porte-échantillon fixe ne divise pas le volume intérieur de cette enceinte
acoustique avec ces dimensions.
Tableau 3.9 : Dimensions de la deuxième enceinte acoustique.
Dimension X [mm] Y [mm] Z [mm] Volume [m3]
Intérieure 830 800 1440 0,96
Le tableau 3.10, présente les quinze premières fréquences propres à l’enceinte obtenues
pour une célérité de l’air, ainsi que la structure des modes associés, représentés par le triplet (a,
b, c).

Chapitre 3 : Conception et réalisation de l’instrument
84
Tableau 3.10 : Fréquences propres de l'enceinte acoustique.
a b c Fréquences propres à l’enceinte acoustique Type du mode
0 0 1 118,1 Hz Axial
1 0 0 204,8 Hz Axial
0 1 0 212,5Hz Axial
0 0 2 236,1 Hz Axial
1 0 1 236,4 Hz Tangentiel
0 1 1 243,1 Hz Tangentiel
1 1 0 295,1 Hz Tangentiel
1 0 2 312,6Hz Tangentiel
0 1 2 317,7Hz Tangentiel
1 1 1 317,9Hz Oblique
0 0 3 354,2 Hz Axial
1 1 2 378,0Hz Oblique
1 0 3 409,1 Hz Tangentiel
2 0 0 409,6Hz Axial
0 1 3 413,0 Hz Tangentiel
À partir de ces résultats, et comparativement avec la première enceinte acoustique, on peut
remarquer que les fréquences de résonance ont effectivement diminué. Elles restent cependant
entre les basses et les moyennes fréquences. Les dimensions, la forme et la matière utilisée
dans la conception de cette enceinte affectent le comportement des ondes sonores.
5.3. Atténuation de l’enceinte acoustique
Les deux enceintes acoustiques ont été testées dans une chambre réverbérante standard.
Cette chambre est instrumenté avec 8 haut parleurs (pour la gamme de fréquence moyennes
et pour les aigus). Dans cette salle, le champ sonore est diffus. L'atténuation sera considérée
comme la différence d'amplitude sonore dans la même situation avec et sans l’enceinte
acoustique. Cette mesure a été réalisée pour deux volumes différents pour les deux enceintes
développées : une petite boîte (0,0714 m³), et une grande boîte (0,9562 m³) pour 95 dB(A)12
à
105 dBA. L’échelle dB(A) a été choisie car c’est la plus approprié pour l'évaluation humaine.
La Figure 3.25 montre que l’atténuation de la grande enceinte acoustique est plus importante
que la petite enceinte acoustique.

Chapitre 3 : Conception et réalisation de l’instrument
85
Figure 3.25 : Atténuation des deux enceintes développées
6. Instrument expérimental
L’instrument expérimental final est présenté par la Figure 3-26. L’enceinte acoustique (1)
de volume intérieur de 0,96 m3, ayant une isolation acoustique assurée par une mousse
acoustique (15). A l’intérieur de cette enceinte, il y a un microphone (2), le porte-échantillon
mobile (3), et le porte-échantillon fixe (4). A l’extérieur de l’enceinte, on a la partie mécanique
et la partie d’enregistrement. Le mouvement est assuré par le moteur électrique(5), alimenté par
le générateur électrique (6). La tige plate (10) fixée sur le disque (14) a un mouvement de
balayage qui sera transmis au porte échantillon (3). La partie d’enregistrement est constituée
d’un amplificateur (7) lié au microphone (2) et l’enregistreur (8), ce dernier est lié à un
programme de traitement des enregistrements dans l’ordinateur (9).
-20
-10
0
10
20
30
40
16
32
63
125
250
500
1000
2000
4000
8000
16000
Att
énuat
ion [
dB
A]
Fréqunece [Hz]
Grande Boite
Petite Boite

Chapitre 3 : Conception et réalisation de l’instrument
86
Figure 3. 26 : Instrument expérimental développé

Chapitre 3 : Conception et réalisation de l’instrument
87
7. Conclusion
Ce chapitre a présenté toutes les étapes expérimentales qui nous ont aidé à la conception et
la réalisation de l’instrument développé dans le cadre de cette étude. La partie relative au calcul
des pièces maitresses et la fabrication de toute la partie mécanique ont été présentées par étapes
pour aboutir au choix final du mécanisme. Les contraintes rencontrées dans la fabrication de cet
instrument ont été résolues par différentes amélioration des pièces mécaniques et la
modification des dimensions de l’enceinte acoustique développée. Le choix a été toujours basé
sur des tests tels que les tests d’atténuation du bruit et de l’étude des dimensions de deux
enceintes pour décaler les ondes stationnaires dans les basses fréquences.
Dans le chapitre suivant, nous allons utiliser cet instrument pour l’étude de plusieurs
échantillons avec différentes conditions d’essais. Cette étape nous permettra de valider
l’instrument compte tenu des objectifs de notre étude.

88
CHAPITRE 4
EXPÉRIMENTATIONS

Chapitre 4 : Expérimentations
89
1. Introduction
Dans le cadre de cette partie expérimentale, de nombreuse étoffes ont été testées (quinze
échantillons) dont l’ensemble des résultats est présenté en annexe. Dans le cadre de ce chapitre
nous nous intéresserons plus particulièrement aux résultats des étoffe T1 (coton / élasthanne),
T2 (Polyamide/Polyuréthane), et T3 (Soie) car ils sont significatifs de l’ensemble des tests.
Les paramètres qui varient dans le cadre de cette étude sont la vitesse du mouvement et la
surface de frottement. La pression est maintenue constante tout au long des expérimentations.
Pour l’interprétation des résultats, nous avons quantifié trois paramètres sonores du tissu par
un outil d’analyse des spectres acoustiques obtenus grâce à la chaîne instrumental que nous
avons développée. Ces trois paramètres sonores, cités dans un chapitre précédent, sont (LPT),
(ΔL) et (Δ f).
- (LPT) se calcule selon la formule ci-dessus :
(éq.4.1)
Avec L : niveau sonore de chaque bande du spectre du son sur la gamme de 20 Hz – 20
kHz.
- (ΔL) est la plage de niveau sonore, (ΔL) est défini comme :
(éq.4.2)
- (Δ f) est l’écart de fréquence, est défini comme :
(éq.4.3)
Dans les essais qui suivent pour différents échantillons, nous avons utilisé ces paramètres
acoustiques pour analyser l’influence de la vitesse du frottement et de la surface du frottement
sur le bruit de friction. Les spectres sont traités et présentés en tiers d’octave. Les pressions
acoustiques pondérés31
A sont aussi présentées dans les graphes afin de tenir compte de
l’oreille moyenne de l’homme (la structure et la fonction de l’oreille humaine sont en annexe).
L’oreille humaine perçoit des sons à partir de 20 micro pascals (seuil d’audibilité) et jusqu’à 20
pascals (seuil de la douleur). L’échelle du bruit s’étend de 0 dB (seuil d’audibilité) à 130 dB

Chapitre 4 : Expérimentations
90
(seuil de la douleur). Les sons de la vie courante sont compris entre 30 et 90 décibels4. On
trouve des niveaux supérieurs à 90 dB essentiellement dans la vie professionnelle. Les Figure
(4.1 et 4.2) [75] présente les niveaux sonores du bruit dans notre vie courante. C’est une
illustration en (dB) du seuil du bruit de très calme au plus dangereux à l’oreille humaine.
Figure 4.1 : Illustration du seuil du bruit.
Figure 4.2 : L’échelle du bruit selon la perception de l’oreille humaine.
Chapitre 4 : Expérimentations
91
2. Protocole expérimental
2.1. Échantillons textiles
L’ensemble des essais réalisés sur le dispositif expérimental développé s’effectue sur une
surface plane d’échantillons d’étoffe destinée à l’habillement. Des échantillons de dimension de
(50x50 cm²) et de (10x11 cm²) ont été découpés pour chaque tissu, ils sont consécutivement
montés sur les porte-échantillons fixe et mobile de l’instrument expérimental.
2.2. Instrument expérimental
L’instrument expérimental est réglé afin de pouvoir réaliser des tests avec trois vitesses
d’essais afin de correspondre aux trois modes de déplacement étudies (marche, jogging, et
course). Les paramètres des essais sont indiqués selon le tableau 4.1.
Tableau 4.1 : Identification des facteurs
Vitesse [m/s] Surfaces [m²] Pression [kPa]
V1 V2 V3 S1 S2 P
0,56 0,94 1,64 0,017 0,009 1,7
La chaîne d’acquisition du son est calibrée par l’étalonnage du microphone, la position de
ce dernier, durant les essais, est maintenue constante au dessus de l’échantillon mobile à 1cm, à
l’intérieur de l’enceinte acoustique.
Les sons enregistrés ont été traités par un programme d’analyse de Fourier (FFT) afin
d’obtenir des courbes spectrales (niveau sonore en fonction de la fréquence). Cette
transformation a permis d’obtenir le niveau sonore pour chaque bande de1/3 d’octave3.

Chapitre 4 : Expérimentations
92
3. Essais expérimentaux
Nous avons commencé par l’enregistrement du bruit de fond6 pour chacune des trois
vitesses. Les spectres sont présentés par les Figures (4.3, 4.4, et 4.5). Le tableau 4.2 présente le
niveau global du bruit de fond selon les trois allures de vitesses.
Figure 4.3 : Spectre du bruit de fond pour la vitesse V1 en [dB] et en [dB(A)].
Figure 4.4 : Spectre du bruit de fond pour la vitesse V2 en [dB] et en [dB(A)].
0
20
40
60
80
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit de fond V1
0
10
20
30
40
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit de fond V1
0
20
40
60
80
31
,5
62
,5
12
5
25
0
50
0
10
00
20
00
40
00
80
00
16
00
0
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit de fond V2
0
10
20
30
40
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit de fond V2

Chapitre 4 : Expérimentations
93
Figure 4.5 : Spectre du bruit de fond pour la vitesse V3 en [dB] et en [dB(A)].
Tableau 4.2 : Récapitulatif du niveau global du bruit de fond.
Bruit de fond V1 V2 V3
dB 70 74 73
dB(A) 44 47 49
Une analyse de ces spectres montre que, quelle que soit la vitesse, le bruit de fond est plus
élevé dans le domaine des basses fréquences. La fréquence de résonance de l’enceinte
acoustique dont nous avons auparavant augmenté les dimensions afin de limiter ce phénomène
est aussi située dans cette bande de basses fréquences. Étant donné que nous allons se baser sur
les moyennes et hautes fréquences pour le textile, la résonance ne va pas affecter les
enregistrements des frottements des tissus.
Le fort niveau en très basses fréquences (< 50 Hz) est dû au bruit ambiant5 non atténué par
l’enceinte acoustique. Pour cette raison, le bruit de fond sera pris en compte lors de l’analyse
des spectres de frottement des tissus qui seront analysés. Dans les domaines des basses
fréquences (<100 Hz) on ne pourra pas séparer la contribution du bruit de friction par rapport
au bruit de fond. La gamme de fréquence importante pour l’enregistrement du son des
frottements des tissus se situe principalement dans les moyennes et hautes fréquences. Cette
plage correspond aussi au domaine fréquentiel où l’oreille est la plus sensible. Dans les
moyennes et hautes fréquences le bruit de fond sera comparé avec le bruit de frottement des
tissus.
0
20
40
60
80
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit de fond V3
0
10
20
30
40
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit de fond V3

Chapitre 4 : Expérimentations
94
4. Essais avec tissus
Dans cette étude, nous avons choisi 15 tissus différents utilisés dans l’habillement, ne
seront présentés en détail dans cette partie que 3 tissus car comme cela a été mentionné, ils
représentent les comportements caractéristiques des étoffes étudiées avec une diversité
distinguée entre leurs signaux acoustiques. L’ensemble des résultats de tous ces tissus sont
placés en annexe.
4.1. Échantillon (T1) en coton / élasthanne
Les caractéristiques de l’étoffe sont présentées dans le tableau 4.3.
Tableau 4.3 : Caractéristiques techniques du tissu T1 (coton / élasthanne)
Matière Armure Masse
[g/m²]
Fils de
chaîne
[Tex]
Fils de
trame
[Tex]
Densité
en chaîne
Fil/cm
Densité
en trame
Fil/cm
coton/élasthanne Toile 108 7 10 85 40
4.1.1 Essais de frottement pour la surface S1
Les résultats obtenus par trois essais réalisés pour chaque cas de la surface d’essai S1 et les
vitesses V1, V2, et V3 sont présentés dans les Figures (4.6, 4.7, et 4.8) respectivement.
Figure 4.6 : Spectre sonore pour le tissu Coton / Élasthanne pour la vitesse V1 en [dB] et en
[dB(A)].
0
20
40
60
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T1.V1.S1
-20
0
20
40
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T1.V1.S1

Chapitre 4 : Expérimentations
95
Figure 4. 7 : Spectre sonore pour le tissu Coton / Élasthanne pour la vitesse V2 en [dB] et en
[dB(A)].
Figure 4.8 : Spectre sonore pour le tissu Coton / Élasthanne pour la vitesse V3 en [dB] et en
[dB(A)].
Les paramètres acoustiques du tissu calculés à partir des spectres sont présentés dans le
Tableau 4.4. Les pressions acoustiques pondérées A du tissu et les fréquences qui
correspondent à ces pressions sont présentées dans le Tableau 4.5.
0 10 20 30 40 50 60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000 A
mp
litu
de
[dB
]
Fréquence [Hz]
T1.V2.S1
-20
0
20
40
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T1.V2.S1
0
20
40
60
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T1.V3.S1
0
20
40
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T1.V3.S1

Chapitre 4 : Expérimentations
96
Tableau 4.4 : Paramètres acoustiques du tissu selon les trois vitesses et la surface S1.
Tissu
coton/élasthanne
S1
LPT [dB] ΔL [dB] Δf [Hz] LPT
[dBA] ΔL [dBA] Δf [Hz]
V1 62 ± 0,6 44,59 7875 61 ± 0,6 59,59 7875
V2 62 ± 0,6 36,16 7875 61 ± 0,6 54,56 6187,5
V3 63 ± 0,6 32,22 -93,5 61 ± 0,6 49,23 6170
Tableau 4.5 : Niveau sonore maximum et sa fréquence.
Tissu coton/élasthanne Bruit max du tissu dB(A) F (Hz)
V1 55,4 ± 0,5 8000
V2 54,9 ± 0,9 6250
V3 54,7 ± 1 6250
En analysant ces résultats, nous observons que la vitesse de frottement pour ce type de
tissu ne modifie pas le niveau de bruit obtenu. Pour la vitesse V3, on a un niveau total de 63
dB par rapport à la vitesse V1 et V2 qui reste à 62 dB. À 1 dB de différence, la perception du
bruit par l’oreille reste la même.
Les valeurs du niveau de bruit atténué restent identiques (61 dB(A)) pour les trois vitesses,
indiquant que la perception du bruit du frottement de ce tissu ne sera pas différente par un
individu pour ces trois vitesses. La Figure 4.9 nous montre clairement cette observation de bruit
atténué qui reste constant.
Figure 4.9 : Niveau acoustique total du tissu coton / élasthanne pour les trois vitesses et la
surface S1.
60
60,5
61
61,5
62
62,5
63
63,5
V1 V2 V3
Niv
eau
aco
ust
iqu
e to
tal
Vitesse [m/s]
LPT [dB]
LPT [dBA]

Chapitre 4 : Expérimentations
97
L’analyse des spectres de bruit du tissu par rapport au bruit de fond, présentés sur les
Figures (4.10, 4.11, et 4.12) montre que le niveau du bruit de frottement de ce tissu est plus
important du bruit de fond au delà de la fréquence 800 Hz (point d’intersection des deux
graphes). Pour ce tissu, le bruit de frottement est situé dans la bande (800 Hz, 16 kHz) en 1/3
octaves. Nous avons observé que les tissus en polyester et en polyamide ont la même bande de
fréquence pour le bruit de frottement (T13, T14, et T15 en annexe 1), ce qui dénote une
importance de la matière dans la génération du bruit.
Figure 4.10 : Spectre sonore pour le tissu coton / élasthanne et bruit de fond pour la vitesse
V1 en [dB] et en [dB(A)] et la surface S1.
Figure 4.11 : Spectre sonore pour le tissu coton / élasthanne et bruit de fond pour la vitesse
V2 en [dB] et en [dB(A)] et la surface S1.
0
20
40
60
80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T1.V1.S1
BF
T1 -10
0 10 20 30 40 50 60
31,5
80
200
500
1250
3150
8000
20000
Am
pli
tud
e [d
B (
A)]
Fréquence [Hz]
T1.V1.S1
BF
T1
0 10 20 30 40 50 60 70 80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T1.V2.S1
BF
T1 0
10
20
30
40
50
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B (
A)]
Fréquence [Hz]
T1.V2.S1
BF
T1

Chapitre 4 : Expérimentations
98
Figure 4.12 : Spectre sonore pour le tissu coton / élasthanne et bruit de fond pour la vitesse
V3 en [dB] et en [dBA] et la surface S1.
Si l’on reporte sur le même graphique les trois courbes spectrales obtenues avec des
vitesses de frottement différentes, (en dB sur la Figure 4.13 et en dB(A) sur la Figure 4.14) ; on
observe que les résultats observés sont cohérents avec les calculs de (LPT) précédemment
réalisés et on remarque la faible influence de la vitesse sur les résultats.
Figure 4.13 : Spectre sonore du tissu coton / élasthanne pour les trois vitesses en [dB] et une
surface S1.
0 10 20 30 40 50 60 70 80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T1.V3.S1
BF
T1 0
10
20
30
40
50
60
31,5
80
200
500
1250
3150
8000
20000
Am
pli
tud
e [d
B (
A)]
Fréquence [Hz]
T1.V3.S1
BF
T1
0
10
20
30
40
50
60
Am
pli
tud
e [d
B]
Fréquence[Hz]
T1.S1
V1
V2
V3

Chapitre 4 : Expérimentations
99
Figure 4.14 : Spectre sonore du tissu coton / élasthanne pour les trois vitesses en [dB(A)] et
une surface S1.
4.1.2 Essais de frottement pour la surface S2
Dans les cas où la surface de frottement est réduite (surface S2), les résultats ont donné les
courbes spectrales présentées sur les figures 4.15, 4.16, et 4.17 pour les trois vitesses V1, V2, et
V3 comme précédemment, les valeurs sont présentées en dB et en dB(A).
Figure 4.15 : Spectre sonore pour le tissu coton / élasthanne pour la vitesse V1 en [dB] et en
[dB(A)] et la surface S2.
-10
0
10
20
30
40
50
60
Am
pli
tud
e [d
B(A
)]
Fréquence[Hz]
T1.S1
V1
V2
V3
0
20
40
60
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T1.V1.S2
0
20
40
60
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T1.V1.S2

Chapitre 4 : Expérimentations
100
Figure 4.16 : Spectre sonore pour le tissu coton / élasthanne pour la vitesse V2 en [dB] et en
[dB(A)] et la surface S2.
Figure 4.17 : Spectre sonore pour le tissu coton / élasthanne pour la vitesse V3 en [dB].
[dB(A)] et la surface S2.
Par leurs données, nous calculons les paramètres acoustiques du tissu. Les résultats sont
mentionnés dans le Tableau 4.6. Les pressions acoustiques pondérés A du tissu et les
fréquences qui correspondent à ces pressions sont présentées dans le Tableau 4.7.
0
20
40
60
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T1.V2.S2
0
20
40
60
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T1.V2.S2
0
20
40
60
80
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T1.V3.S2
0
20
40
60
80
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T1.V3.S2

Chapitre 4 : Expérimentations
101
Tableau 4.6 : Paramètres acoustiques du tissu selon les trois vitesses et la surface S2.
Tissu
coton/élasthanne
S2
LPT [dB] ΔL [dB] Δf [Hz] LPT [dBA] ΔL [dBA] Δf/A [Hz]
V1 59± 1,5 27,44 7875 57± 1,5 44,12 6170
V2 59± 0,6 27,88 12375 57± 1,7 47,26 7960
V3 65± 0,6 35,50 7840 63± 0,6 53,69 6210
Tableau 4.7 : Niveau sonore maximum et sa fréquence.
Tissu coton/élasthanne Bruit max du tissu dB(A) F (Hz)
V1 50 ± 0,5 6250
V2 50,9 ± 3 8000
V3 57,6 ± 1,5 6250
Les résultats montrent un niveau de bruit plus élevé pour V3 par rapport au V1 et V2. Les
niveaux du bruit pour les vitesses V1 et de V2 sont identiques pour ce tissu (Figure 4.18).
Figure 4.18 : Niveau acoustique total du Tissu coton / élasthanne pour les trois vitesses.
L’analyse des spectres de bruit du tissu par rapport au bruit de fond, présenté sur les
Figures (4.19, 4.20, et 4.21) montre que le niveau du bruit de frottement de ce tissu avec une
surface de frottement réduite, reste plus important au delà de la fréquence de 800 Hz.
Pour ce tissu, le bruit de frottement est situé dans la bande (800 Hz, 16 kHz) en 1/3 octaves
pour les deux surfaces de frottement S1 et S2.
50
55
60
65
70
V1 V2 V3
Niv
eau
aco
ust
iqu
e to
tal
Vitesse [m/s]
LPT [dB]
LPT [dBA]

Chapitre 4 : Expérimentations
102
Figure 4.19 : Spectre sonore pour le tissu coton / élasthanne avec le bruit de fond pour la
vitesse V1 en [dB]. [dB(A)] et la surface S2.
Figure 4.20 : Spectre sonore pour le tissu coton / élasthanne avec le bruit de fond pour la
vitesse V2 en [dB]. [dB(A)] et la surface S2.
0 10 20 30 40 50 60 70 80
31,5
80
200
500
1250
3150
8000
20000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T1.V1.S2
BF
T1 0
10
20
30
40
50
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B (
A)]
Fréquence [Hz]
T1.V1.S2
BF
T1
0 10 20 30 40 50 60 70 80
31,5
80
200
500
1250
3150
8000
20000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T1.V2.S2
BF
T1 0
10
20
30
40
50
60 31,5
62,5
125
250
500
1000
2000
4000
8000
16000 A
mp
litu
de
[dB
(A
)]
Fréquence [Hz]
T1.V2.S2
BF
T1

Chapitre 4 : Expérimentations
103
Figure 4.21 : Spectre sonore pour le tissu coton / élasthanne avec le bruit de fond pour la
vitesse V3 en [dB]. [dB(A)] et la surface S2.
Les Figures (4.22 et 4.23) présentent le tissu T1 selon les trois vitesses d’essais, on observe
que pour ce type de tissu le bruit de frottement est plus important en V3 pour une surface
réduite de frottement S2.
Figure 4.22 : Spectre sonore du tissu coton / élasthanne pour les trois vitesses en [dB(A)] et
une surface S2.
0 10 20 30 40 50 60 70 80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T1.V3.S2
BF
T1 0
10 20 30 40 50 60 70
31,5
62,5
125
250
500
1000
2000
4000
8000
16000 A
mp
litu
de
[dB
(A
)]
Fréquence [Hz]
T1.V3.S2
BF
T1
0
10
20
30
40
50
60
70
Am
pli
tud
e [d
B]
Fréquence[Hz]
T1.S2
V1
V2
V3

Chapitre 4 : Expérimentations
104
Figure 4.23 : Spectre sonore du tissu coton / élasthanne pour les trois vitesses en [dB(A)] et
une surface S2.
Ce tissu en coton/élasthanne présente un bruit de frottement entre 61 et 63 dB(A), ce
niveau correspond presque au niveau d’un signal de parole d’une conversation humaine
normale. L’empreinte acoustique du signal est présentée par la Figure 4.24.
Figure 4.24 : Empreinte acoustique du tissu Coton/Élasthanne.
0
10
20
30
40
50
60
70
Am
pli
tud
e [d
B(A
)]
Fréquence[Hz]
T1.S2
V1
V2
V3
0
5
10
15
20
25
30
35
40
45
20 200 2000 20000
Am
pli
tud
e [d
B]
Fréquence [Hz]

Chapitre 4 : Expérimentations
105
4.2. Échantillon en Polyamide/Polyuréthane (T2)
Les caractéristiques techniques du support textile sont présentées dans le tableau 4.8.
Tableau 4.8 : Caractéristiques techniques du tissu (Polyamide/Polyuréthane).
Matière Armure Masse
[g/m²] Chaine (Tex)
Trame
(Tex)
chaine
Fil/cm
trame
Fil/cm
Polyamide/
polyuréthane Toile 316 6 20 41 23
4.2.1 Essais de frottement pour la surface S1
Les résultats obtenus pour la surface d’essai S1 et les vitesses V1, V2, et V3 sont présentés
dans les Figures (4.25, 4.26, et 4.27) respectivement.
Figure 4.25 : Spectre sonore pour le tissu Polyamide/Polyuréthane pour la vitesse V1 en [dB]
et en [dB(A)] et une surface S1.
0
20
40
60
80
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T2.V1.S1
0
20
40
60
80
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T2.V1.S1

Chapitre 4 : Expérimentations
106
Figure 4.26 : Spectre sonore pour le tissu Polyamide/Polyuréthane pour la vitesse V2 en [dB]
et en [dB(A)] une surface S1.
Figure 4.27 : Spectre sonore pour le tissu Polyamide/Polyuréthane pour la vitesse V3 en [dB]
et en [dB(A)] une surface S1.
Les paramètres acoustiques du tissu calculés à partir des spectres sont présentés dans le
Tableau 4.9. Les pressions acoustiques pondérés A du tissu et les fréquences qui correspondes à
ces pressions sont présentées dans le Tableau 4.10.
0
20
40
60
80
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T2.V2.S1
0
20
40
60
80
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T2.V2.S1
0
20
40
60
80
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T2.V3.S1
0
20
40
60
80
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T2.V3.S1

Chapitre 4 : Expérimentations
107
Tableau 4.9 : Paramètres acoustiques du tissu Polyamide/Polyuréthane
Tissu
Polyamide/polyuréthane
S1
LPT
[dB] ΔL [dB] Δf [Hz]
LPT
[dBA]
ΔL
[dBA] Δf [Hz]
V1 79 ± 0,6 46,15 19875 76 ± 0,6 64,98 6210
V2 79 ± 0,6 47,55 15875 76 ± 0,6 62,67 7960
V3 81 ± 0,6 46,86 19875 78 ± 0,6 61,75 6210
Tableau 4.10 : Niveau sonore maximum et sa fréquence.
Tissu
Polyamide/polyuréthane S1
Bruit max du tissu dB(A) F (Hz)
V1 68,5 ± 0,4 6250
V2 68,6 ± 0,5 8000
V3 69,9 ± 0,8 6250
Dans le cas de ce tissu, les résultats montrent comme précédemment un bruit plus élevé
pour la vitesse V3 par rapport au deux autres vitesses (V1et V2). Le niveau est plus élevé
(quelle que soit la vitesse) que dans le cas du tissu étudié précédemment. Le niveau du bruit de
ce tissu est de l’ordre de 78 dB(A) pour la vitesse V3. Ce niveau de bruit dépasse largement le
niveau de conversation humaine normale qui est de 65 dB(A). Le niveau du bruit pour la
vitesse V1 et V2 reste identique pour ce tissu (Figure 4.28).
Figure 4.28 : Niveau acoustique total du Tissu Polyamide/Polyuréthane (T2) selon les 3
vitesses et la surface S1.
75
76
77
78
79
80
81
82
V1 V2 V3
Niv
eau
aco
ust
iqu
e to
tal
Vitesse [m/s]
LPT [dB]
LPT [dBA]

Chapitre 4 : Expérimentations
108
L’analyse des données de bruit du tissu par rapport au bruit de fond, selon les Figures
(4.29, 4.30, et 4.31) montre que le niveau du bruit de frottement de ce tissu est plus important
au delà de la fréquence de 500 Hz quelle que soit la vitesse. Le domaine fréquentiel de ce bruit
de frottement est (500 Hz, 16 kHz) en le 1/3 d’octaves. Ce même domaine fréquentiel de bruit a
été observé pour un tissu mélange coton/polyester (T7 en annexe).
Figure 4.29 : Spectre sonore pour le tissu Polyamide/Polyuréthane et le bruit de fond pour V1
en [dB] et en [dB(A)] et la surface S1
Figure 4.30 : Spectre sonore pour le tissu Polyamide/Polyuréthane et le bruit de fond pour V2
en [dB] et en [dB(A)] et la surface S1.
0 10 20 30 40 50 60 70 80
31,5
80
200
500
1250
3150
8000
20000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T2.V1.S1
BF
T2 0
10 20 30 40 50 60 70 80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000 A
mp
litu
de
[dB
(A
)]
Fréquence [Hz]
T2.V1.S1
BF
T2
0 10 20 30 40 50 60 70 80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T2.V2.S1
BF
T2 0
10 20 30 40 50 60 70 80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B (
A)]
Fréquence [Hz]
T2.V2.S1
BF
T2

Chapitre 4 : Expérimentations
109
Figure 4.31 : Spectre sonore pour le tissu Polyamide/Polyuréthane et le bruit de fond pour V3
en [dB] et en [dBA] et la surface S1.
Les Figure (4. 32 et 4.33) présentent le spectre sonore du tissu T2 pour les 3 vitesses de
frottement. On observe que le bruit de frottement est important pour la vitesse de V3, pour ce
type de tissu.
Figure 4.32 : Spectre sonore pour le tissu coton / élasthanne trois vitesses en [dB(A)] et la
surface S1.
0 10 20 30 40 50 60 70 80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T2.V3.S1
BF
T2 0
10 20 30 40 50 60 70 80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000 A
mp
litu
de
[dB
(A
)]
Fréquence [Hz]
T2.V3.S1
BF
T2
0
10
20
30
40
50
60
70
80
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B]
Fréquence[Hz]
T2.S1
V1
V2
V3

Chapitre 4 : Expérimentations
110
Figure 4.33 : Spectre sonore pour le tissu Polyamide/Polyuréthane (T2) des trois vitesses en
[dB] et en [dB(A)] et de la surface S1.
4.2.2 Essais de frottement pour la surface S2
Dans les cas où la surface de frottement est réduite (surface S2), les résultats ont donné les
courbes spectrales présentées sur les figures 4.34, 4.35, et 4.36 pour les trois vitesses V1, V2, et
V3. Comme précédemment, les valeurs sont présentées en dB et en dB(A).
Figure 4.34 : Spectre sonore pour le tissu polyamide/polyuréthane pour V1 en [dB] et en
[dBA]
0
10
20
30
40
50
60
70
80
Am
pli
tud
e [d
B(A
)]
Fréquence[Hz]
T2.S1
V1
V2
V3
0
20
40
60
80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
plit
ud
e [d
B]
Fréquence [Hz]
T2.V1.S2
0
20
40
60
80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000 A
mpli
tude
[dB
(A)]
Fréquence [Hz]
T2.V1.S2

Chapitre 4 : Expérimentations
111
Figure 4.35 : Spectre sonore pour le tissu polyamide/polyuréthane pour V2 en [dB] et en
[dB(A)].
Figure 4.36 : Spectre sonore pour le tissu polyamide/polyuréthane pour V3 en [dB] et en
[dB(A)].
Les paramètres acoustiques du tissu sont calculés selon les données obtenues par les
spectres des frottements des tissus présentés par les graphes des Figures (4.34, 4.35, et 4.36).
Les résultats sont dans le Tableau 4.11. Les pressions acoustiques pondérés A du tissu et les
fréquences qui correspondes à ces pressions sont présentées dans le Tableau 4.12.
0
20
40
60
80
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T2.V2.S2
0
20
40
60
80
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T2.V2.S2
0
20
40
60
80
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T2.V3.S2
0
20
40
60
80
31,5
50
80
125
200
315
500
800
1250
2000
3150
5000
8000
12500
20000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T2.V3.S2

Chapitre 4 : Expérimentations
112
Tableau 4.11 : Paramètres acoustiques du tissu polyamide/polyuréthane selon les trois
vitesses et la surface S2.
Tissu
Polyamide/polyuréthane
S2
LPT
[dB]
ΔL
[dB] Δf [Hz]
LPT
[dBA]
ΔL
[dBA]
Δf/A
[Hz]
V1 78 ± 1 50,79 15875 74 ± 1,5 64,91 9937,5
V2 79 ± 1,5 46,37 19800 75± 1,5 60,93 9937,5
V3 79 ± 2 46,74 19875 74 ± 2 58,92 7937,5
Tableau 4.12 : Niveau sonore maximum et sa fréquence.
Tissu
Polyamide/polyuréthane S2
Bruit max du tissu dB(A) F (Hz)
V1 67,5 ± 2 10000
V2 68,1 ± 1 10000
V3 66,6 ± 1,7 8000
D’après les résultats, le niveau du bruit de frottement est toujours supérieur au bruit d’une
conversation humaine normale pour ce tissu. On observe aussi une diminution de quelques
décibels du niveau du bruit. Cela peut être dû à la diminution de la surface de frottement. Selon
la Figure 4.37, le bruit en dB(A) reste identique pour les vitesses V1, V2 et V3 a un décibel de
moins. Cela veut dire que la perception du bruit de frottement de ce tissu par un individu sera
un peu difficile pour distinguer la différence du bruit de frottement du tissu par rapport à la
vitesse V1, V2 et V3.
Figure 4.37 : Niveau acoustique total du tissu polyamide/polyuréthane pour les trois vitesses
et la surface S2.
L’analyse des données de bruit du tissu par rapport au bruit de fond, selon les Figures
(4.38, 4.39, et 4.40) montre que le niveau du bruit de frottement de ce tissu est plus important
71 72 73 74 75 76 77 78 79 80
V1 V2 V3
Niv
eau
aco
ust
iqu
e to
tal
Vitesse [m/s]
LPT[dB]
LPT
[dBA]
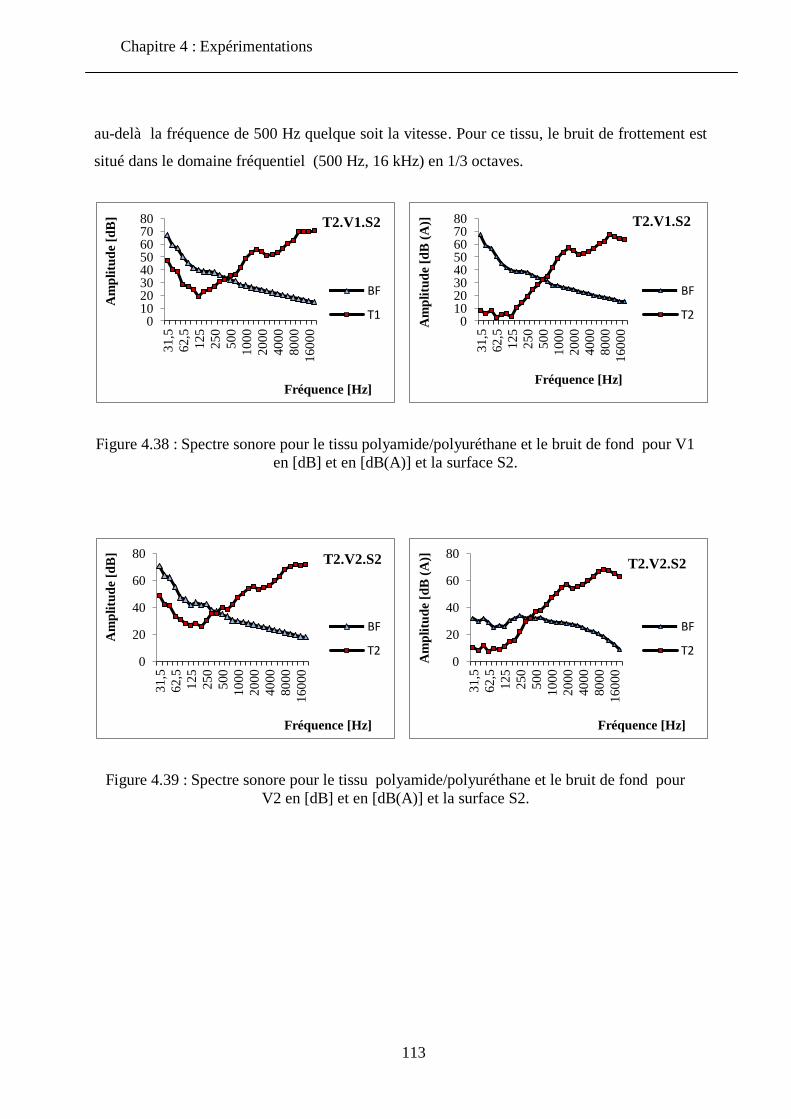
Chapitre 4 : Expérimentations
113
au-delà la fréquence de 500 Hz quelque soit la vitesse. Pour ce tissu, le bruit de frottement est
situé dans le domaine fréquentiel (500 Hz, 16 kHz) en 1/3 octaves.
Figure 4.38 : Spectre sonore pour le tissu polyamide/polyuréthane et le bruit de fond pour V1
en [dB] et en [dB(A)] et la surface S2.
Figure 4.39 : Spectre sonore pour le tissu polyamide/polyuréthane et le bruit de fond pour
V2 en [dB] et en [dB(A)] et la surface S2.
0 10 20 30 40 50 60 70 80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T2.V1.S2
BF
T1 0
10 20 30 40 50 60 70 80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000 A
mp
litu
de
[dB
(A
)]
Fréquence [Hz]
T2.V1.S2
BF
T2
0
20
40
60
80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T2.V2.S2
BF
T2 0
20
40
60
80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B (
A)]
Fréquence [Hz]
T2.V2.S2
BF
T2

Chapitre 4 : Expérimentations
114
Figure 4.40 : Spectre sonore pour le tissu Polyamide/Polyuréthane et le bruit de fond pour V3
en [dB] et en [dB(A)] et la surface S2.
Les Figure (4. 41 et 4.42) présentent le spectre sonore du tissu T2 pour les 3 vitesses de
frottement. On observe que le bruit de frottement est identique au-delà de 500 Hz pour les trois
vitesses de frottement et cela correspond parfaitement avec les calculs précédent de LPT .
Figure 4.41 : Spectre sonore pour le tissu Polyamide/Polyuréthane (T2) des trois vitesses en
[dB] et en [dB(A)] et de la surface S2.
0
20
40
60
80 31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T2.V3.S2
BF
T2 0
10
20
30
40
50
60
70
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B (
A)]
Fréquence [Hz]
T2.V3.S2
BF
T2
0
10
20
30
40
50
60
70
80
Am
pli
tud
e [d
B]
Fréquence[Hz]
T2.S2
V1
V2
V3

Chapitre 4 : Expérimentations
115
Figure 4.42 : Spectre sonore pour le tissu Polyamide/Polyuréthane (T2) des trois vitesses en
[dB] et en [dB(A)] et de la surface S2.
Ce tissu en polyamide/polyuréthane présente un bruit de frottement à partir de 500 Hz pour
les trois vitesses. Le niveau du bruit de ce tissu se situe entre 74 et 78 dB(A), il dépasse le
niveau de bruit d’une conversation humaine normale. Son empreinte acoustique est présentée
par la Figure 4.43.
Figure 4.43 : Empreinte acoustique du tissu polyamide/polyuréthane
0
10
20
30
40
50
60
70
80
Am
pli
tud
e [d
B(A
)]
Fréquence[Hz]
T2.S2
V1
V2
V3
0
5
10
15
20
25
30
35
40
45
50
55
60
65
20 200 2000 20000
Am
pli
tud
e [d
B]
Fréquence [Hz]

Chapitre 4 : Expérimentations
116
4.3. Échantillon en Soie (T3)
Les caractéristiques techniques sont présentées dans le tableau 4.13.
Tableau 4.13 : Caractéristiques techniques du tissu (Soie).
Matière Armure Masse
[g/m²]
Chaine
(Tex)
trame
(Tex)
Chaine
(Fil/cm)
Trame
(Fil/cm)
Soie Toile 35 4 4 59 51
4.3.1 Essais de frottement pour la surface S1
Les résultats obtenus pour la surface d’essai S1 et les vitesses V1, V2, et V3 sont présentés
dans les Figures (4.44, 4.45, et 4.46) respectivement.
Figure 4.44 : Spectre sonore pour le tissu en Soie pour V1 en [dB] et en [dB(A)] et la surface
S1.
Figure 4.45 : Spectre sonore pour le tissu en Soie pour V2 en [dB] et en [dB(A)] et la surface
S1.
0
20
40
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000 A
mp
litu
de
[dB
]
Fréquence [Hz]
T3.V1.S1
-20
0
20
40
60 31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T3.V1.S1
0
20
40
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000 A
mp
litu
de
[dB
]
Fréquence [Hz]
T3.V2.S1
0
20
40
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T3.V2.S1

Chapitre 4 : Expérimentations
117
Figure 4.46 : Spectre sonore pour le tissu en Soie pour V3 en [dB]. [dB(A)] et la surface S1.
Par la même procédure de calcul et de traitement des données (Figures : 4.44, 4.45 et 4.46),
les résultats des paramètres acoustiques du tissu T3 sont présentés dans le Tableau 4.14. Les
pressions acoustiques pondérés A du tissu et les fréquences qui correspondes à ces pressions
sont présentées dans le Tableau 4.15.
0
20
40
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000 A
mp
litu
de
[dB
]
Fréquence [Hz]
T3.V3.S1
0 10 20 30 40 50
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T3.V3.S1
Tableau 4.14 : Paramètres acoustiques du tissu T3 pour les trois vitesses et la surface S1.
Tissu
Soie S1 LPT [dB]
ΔL
[dB] Δf [Hz]
LPT
[dBA]
ΔL
[dBA] Δf [Hz]
V1 56 ± 1,5 32,48 19875 54 ± 1 47,85 7960
V2 57 ± 0,6 30,19 19800 55 ± 1,7 47,32 7900
V3 56 ± 0,6 24,16 -128,5 53 ± 0,6 40,38 7960
Tableau 4.15 : Niveau sonore maximum et sa fréquence.
Tissu
Soie S1
Bruit max du tissu dB(A) F (Hz)
V1 46 ± 1,5 8000
V2 47,1 ± 1,3 8000
V3 45,3 ± 0,6 8000

Chapitre 4 : Expérimentations
118
Les mêmes observations relevées pour les deux échantillons précédents, on a le même
niveau du bruit de frottement pour les trois vitesses à un décibel près de différence. On observe
cela dans la Figure 4.47.
Figure 4.47 : Niveau acoustique total du tissu en Soie.
Le niveau acoustique de la soie est de 57 dB et de 55 dB(A) pour les trois vitesses et la
surface S1. Il est inférieur à la gamme du niveau de bruit d’une conversation humaine normale.
Ce tissu en Soie présente un bruit de frottement au delà de 1250 Hz selon les Figures (4.46,
4.47, 4.48). Cette fréquence était aussi le seuil de bruit des tissus en coton (T8, T9, T10, T11, et
T12 en annexe). Nous pouvons conclure que cette bande de fréquence correspond au bruit
généré par un tissu en 100 % fibre naturelle.
Figure 4.48 : Spectre sonore pour le tissu Soie et le bruit de fond pour V1 en [dB] et en
[dB(A)] et de la surface S1.
51
52
53
54
55
56
57
58
V1 V2 V3
Niv
eau
aco
ust
iqu
e to
tal
Vitesse [m/s]
LPT [dB]
LPT [dBA]
0
20
40
60
80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T3.V1.S1
BF
T3 -10
0
10
20
30
40
50
31,5
80
200
500
1250
3150
8000
20000
Am
pli
tud
e [d
B (
A)]
Fréquence [Hz]
T3.V1.S1
BF
T3

Chapitre 4 : Expérimentations
119
Figure 4.49 : Spectre sonore pour le tissu Soie et le bruit de fond pour V2 en [dB] et en
[dB(A)] et de la surface S1.
Figure 4.50 : Spectre sonore pour le tissu Soie et le bruit de fond pour V3 en [dB] et en
[dB(A)] et pour la surface S1.
Les Figure (4.51 et 4.52) présentent le spectre sonore du tissu T3 pour les 3 vitesses de
frottement. Pour ce tissu, le bruit de frottement est situé dans le domaine fréquentiel (1250 Hz
16 kHz) en 1/3 octaves.
0
20
40
60
80 31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T3.V2.S1
BF
T3 0
10
20
30
40
50
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B (
A)]
Fréquence [Hz]
T3.V2.S1
BF
T3
0
20
40
60
80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T3.V3.S1
BF
T3 0
10
20
30
40
50
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B (
A)]
Fréquence [Hz]
T3.V3.S1
BF
T3
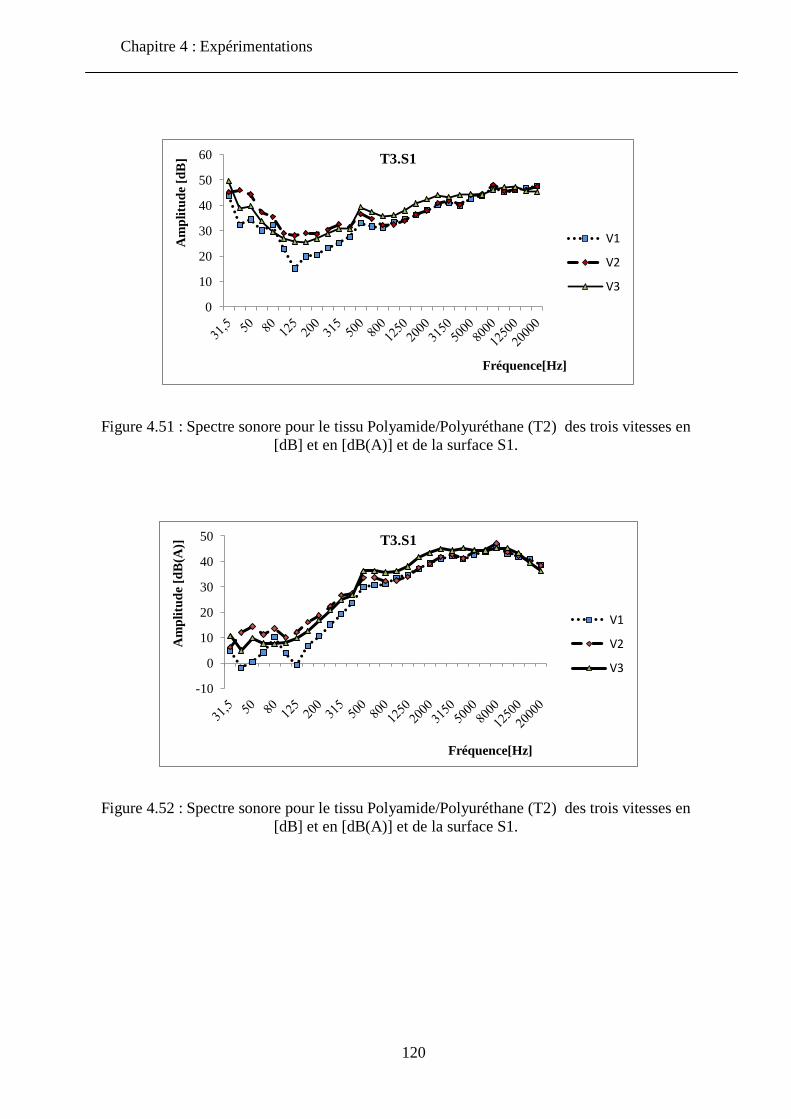
Chapitre 4 : Expérimentations
120
Figure 4.51 : Spectre sonore pour le tissu Polyamide/Polyuréthane (T2) des trois vitesses en
[dB] et en [dB(A)] et de la surface S1.
Figure 4.52 : Spectre sonore pour le tissu Polyamide/Polyuréthane (T2) des trois vitesses en
[dB] et en [dB(A)] et de la surface S1.
0
10
20
30
40
50
60
Am
pli
tud
e [d
B]
Fréquence[Hz]
T3.S1
V1
V2
V3
-10
0
10
20
30
40
50
Am
pli
tud
e [d
B(A
)]
Fréquence[Hz]
T3.S1
V1
V2
V3

Chapitre 4 : Expérimentations
121
4.3.2 Essais de frottement pour la surface S2
Dans les cas où la surface de frottement est réduite (surface S2), les résultats ont donné les
courbes spectrales présentées sur les figures (4.53, 4.54, et 4.55) pour les trois vitesses V1, V2,
et V3. Comme précédemment, les valeurs sont présentées en dB et en dB(A).
Figure 4.53 : Spectre sonore pour le tissu Soie pour V1 en [dB] et en [dB(A)] et la surface S2
Figure 4.54 : Spectre sonore pour le tissu Soie pour V2 en [dB] et en [dB(A)] et la surface
S2
0
20
40
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000 A
mp
litu
de
[dB
]
Fréquence [Hz]
T3.V1.S2
-20
0
20
40
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T3.V1.S2
0
20
40
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000 A
mp
litu
de
[dB
]
Fréquence [Hz]
T3.V2.S2
0 10 20 30 40 50
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T3.V2.S2

Chapitre 4 : Expérimentations
122
Figure 4.55 : Spectre sonore pour le tissu Soie pour V3 en [dB] et en [dB(A)] et la surface S2.
Les résultats des paramètres acoustiques du tissu en Soie sont présentés dans le Tableau
4.16. Les pressions acoustiques pondérés A du tissu et les fréquences qui correspondes à ces
pressions sont présentées dans le Tableau 4.17.
Tableau 4.16 : Paramètres Acoustiques du tissu en Soie.
Tissu
Soie S2 LPT [dB]
ΔL
[dB] Δf [Hz]
LPT
[dBA]
ΔL
[dBA]
Δf/A
[Hz]
V1 57 ± 1,5 29,75 12375 55 ± 1,5 50,12 7950
V2 54 ± 2 24,85 -93,5 50 ± 2 37,91 7937,5
V3 58 ± 0,6 26,38 4875 56 ± 0,6 48,11 7937 ,5
Tableau 4.17 : Niveau sonore maximum et sa fréquence.
Tissu
Soie S2
Bruit max du tissu dB(A) F (Hz)
V1 48,1 ± 2 8000
V2 41,5 ± 2 8000
V3 51 ± 0,5 8000
Le niveau du bruit pour V2 est différent, mais les deux niveaux correspondant à la vitesse
V1 et V3 ont un décibel de différence. Ces résultats sont proches de ceux obtenus pour la
surface de frottement la plus grande S1. La Figure 4.56, présente plus clairement cette
différence.
0
20
40
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000 A
mp
litu
de
[dB
]
Fréquence [Hz]
T3.V3.S2
0
20
40
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B(A
)]
Fréquence [Hz]
T3.V3.S2

Chapitre 4 : Expérimentations
123
Figure 4.56 : Niveau acoustique total du tissu en Soie pour les trois vitesses et la surface S2.
Le son du frottement de la Soie est situé au delà de 1250 Hz selon les Figures (4.57, 4.58,
4.59).
Figure 4.57 : Spectre sonore pour le tissu et le bruit de fond pour V1 en [dB] et en [dB(A)] et
la surface S2.
46
48
50
52
54
56
58
60
V1 V2 V3
Niv
eau
aco
ust
iqu
e to
tal
Vitesse [m/s]
LPT[dB]
LPT[dBA]
0
20
40
60
80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T3.V1.S2
BF
T3 -10
0
10
20
30
40
50
60 31,5
80
200
500
1250
3150
8000
20000
Am
pli
tud
e [d
B (
A)]
Fréquence [Hz]
T3.V1.S2
BF
T3

Chapitre 4 : Expérimentations
124
Figure 4.58 : Spectre sonore pour le tissu et le bruit de fond pour V2 en [dB] et en [dB(A)] et
la surface S2.
Figure 4.59 : Spectre sonore pour le tissu et le bruit de fond pour V3 en [dB] et en [dB(A)] et
la surface S2.
Les Figures (4.60 et 4.61) montrent que le bruit de frottement de ce tissu est important
pour la vitesse V1 et V3 au delà de 1250 Hz. L’empreinte acoustique de ce tissu est présentée
par la Figure 4.62. Pour ce tissu, le bruit de frottement est situé dans le domaine fréquentiel
(1250 Hz, 16 kHz) en 1/3 octaves.
0
20
40
60
80 31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T3.V2.S2
BF
T3 0
10
20
30
40
50
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B (
A)]
Fréquence [Hz]
T3.V2.S2
BF
T3
0
20
40
60
80
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B]
Fréquence [Hz]
T3.V3.S2
BF
T3 0
10
20
30
40
50
60
31,5
62,5
125
250
500
1000
2000
4000
8000
16000
Am
pli
tud
e [d
B (
A)]
Fréquence [Hz]
T3.V3.S2
BF
T3
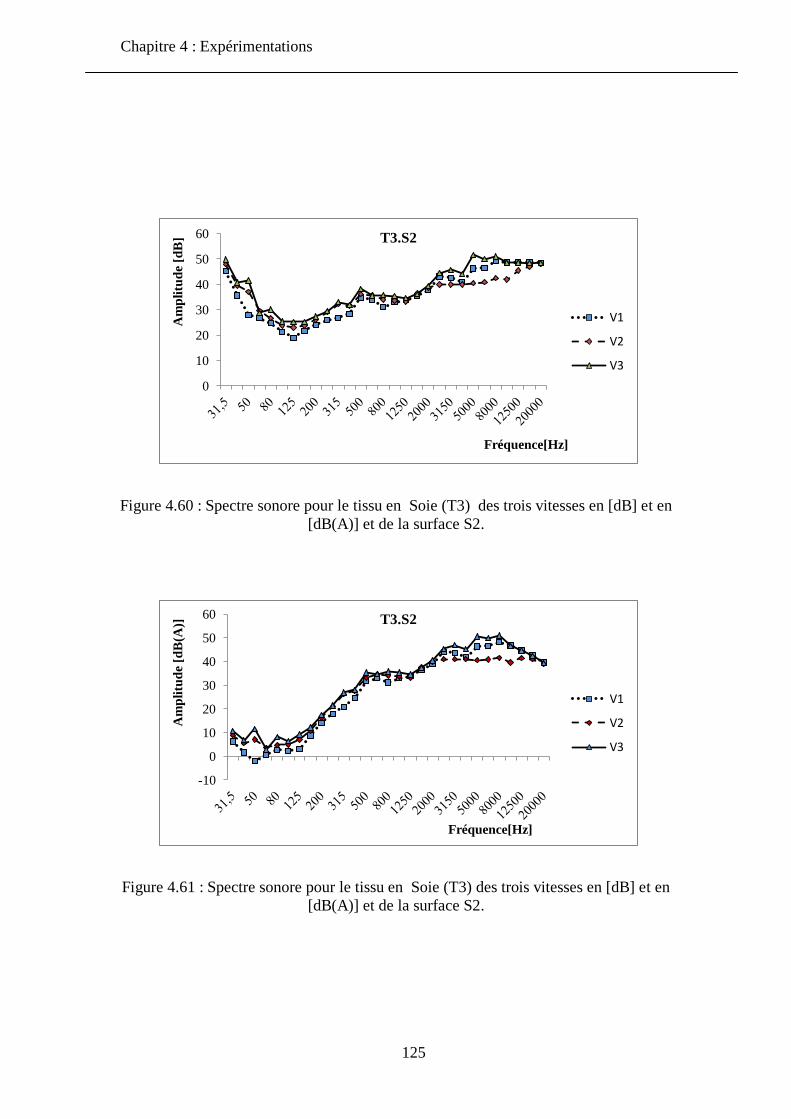
Chapitre 4 : Expérimentations
125
Figure 4.60 : Spectre sonore pour le tissu en Soie (T3) des trois vitesses en [dB] et en
[dB(A)] et de la surface S2.
Figure 4.61 : Spectre sonore pour le tissu en Soie (T3) des trois vitesses en [dB] et en
[dB(A)] et de la surface S2.
0
10
20
30
40
50
60
Am
pli
tud
e [d
B]
Fréquence[Hz]
T3.S2
V1
V2
V3
-10
0
10
20
30
40
50
60
Am
pli
tud
e [d
B(A
)]
Fréquence[Hz]
T3.S2
V1
V2
V3

Chapitre 4 : Expérimentations
126
Figure 4.62 : Empreinte acoustique du tissu en Soie.
Les trois tissus présentent des niveaux de bruit différents dans les mêmes conditions
d’essais de vitesses et de surface de frottement. Les tableaux (4.18 et 4.19) présentent les
pressions acoustiques des tissus T1, T2, et T3 qui diffèrent selon la nature et les propriétés de
chaque tissu. Les Figures (4.63 et 4.64) illustrent ces différences de niveau acoustique total. Le
bruit de frottement du tissu T2 a un domaine fréquentiel plus grand que celui du tissu T1et T3.
Tableau 4.18 : Pressions Acoustiques des trois tissus pour S1.
Surface de
frottement S1
T1 T2 T3
dB dB(A) dB dB(A) dB dB(A)
V1 62 61 79 76 56 54
V2 62 61 79 76 57 55
V3 63 61 81 78 56 53
Tableau 4.19 : Pressions Acoustiques des trois tissus pour S2.
Surface de
frottement S2
T1 T2 T3
dB dB(A) dB dB(A) dB dB(A)
V1 59 57 78 74 57 55
V2 59 57 79 75 54 50
V3 65 63 79 74 58 56
0
5
10
15
20
25
30
35
40
45
20 200 2000 20000
Am
pli
tud
e [d
B]
Fréquence [Hz]

Chapitre 4 : Expérimentations
127
Figure 4.63 : Niveau acoustique total des trois Tissus pour S1.
Figure 4.64 : Niveau acoustique total des trois Tissus pour S2.
0
10
20
30
40
50
60
70
80
90
V1 V2 V3
Niv
eau
aco
ust
iqu
e
to
tal
[dB
]
Vitesse [m/s]
S1
T1
T2
T3
0
10
20
30
40
50
60
70
80
90
V1 V2 V3
Niv
eau
aco
ust
iqu
e
tota
l [d
BA
]
Vitesse [m/s]
S1
T1
T2
T3
0
10
20
30
40
50
60
70
80
90
V1 V2 V3
Niv
eau
aco
ust
iqu
e
to
tal[
dB
]
Vitesse [m/s]
S2
T1
T2
T3 0
10
20
30
40
50
60
70
80
V1 V2 V3
Niv
eau
aco
ust
iqu
e
tota
l[d
BA
]
Vitesse [m/s]
S2
T1
T2
T3

Chapitre 4 : Expérimentations
128
5. Conclusion
Les trois tissus étudiés dans ce chapitre présentent une grande différence dans leur niveau
du bruit de frottement. Cela est dû à la différence de la matière pour chaque support textile. Le
tissu en polyamide/polyuréthane présente le plus haut niveau du bruit qui dépasse le bruit d’une
conversation normale. Le niveau du bruit de la soie est le plus faible, les tissus coton/élasthanne
et le tissu polyamide/polyuréthane présentent des niveaux importants. Les vitesses de
frottement influent sur les niveaux de bruit pour la soie et pour le tissu en
polyamide/polyuréthane, mais moins sur le tissu en coton/élasthanne. La surface de frottement
influe sur le niveau du bruit : une grande surface de frottement engendrera plus de bruit qu’une
plus petite surface et cela quelque soit le type d’étoffe.
La bande de fréquence du bruit de frottement est liée à la nature de la matière du tissu, pour
le polyester et le polyamide, elle est de [800 Hz à 16 kHz] en 1/3 octaves, et pour le coton et la
soie, elle est de [1250 Hz à 16 kHz] cela correspond aux échantillons analysés durant cette
étude. Selon les essais et ces conditions, chaque tissu dans ce chapitre présente une empreinte
acoustique spécifique. Un mélange binaire de la matière première qui constitue l’étoffe
influence le bruit de frottement, nous avons constaté qu’un mélange à la base de deux matières
synthétiques présente un niveau plus élevé par rapport à un mélange binaire à base d’une
matière naturelle et matière synthétique comme il a été constaté pour le tissu polyamide/
polyuréthane (T2), coton / élasthanne (T1) et coton / polyester (T7 en annexe). Le niveau du
bruit des étoffes en matière naturelle est généralement le plus faible, c’est ce que nous avons
constaté pour la soie T3 et le coton pour (T10, T11 et T12 en annexe). Ils restent ainsi dans la
gamme de bruit correspondant à une conversation normale.
Pour les tissus en matière synthétique (polyamide et polyester) qui ont été étudiés (T4, T13,
T14 et T15 en annexe) leur niveaux sonores sont plus élevé que le bruit des étoffes à base de
fibres naturelles mais cependant moins élevé que le niveau du bruit des mélanges binaires de
matière synthétique.

129
CHAPITRE 5
CONCLUSION ET PERSPECTIVES

Chapitre 5 : Conclusion Et Perspectives
130
1. Conclusion
Cette étude avait pour objectif, la compréhension du phénomène de bruit généré par
frottement tissu sur lui même, un bruit constaté le plus souvent durant une activité sportive en
portant un vêtement imperméable. Dans le premier chapitre, nous avons décrit l’évaluation de
la compréhension du frottement, depuis les premières notions énoncées à la fin du 17ème
siècle
par Amontons et Coulomb, jusqu’à aujourd’hui par des recherches qui lient le frottement à
l’acoustique.
Notre étude bibliographique a mis en lumière plusieurs recherches sur ce phénomène, qui
sont majoritaire appliquées aux cas des matériaux rigides, tandis que peu de recherche était
dédiées au domaine textile. Le présent travail apporte une contribution pour cette nouvelle
technique d’analyse du textile par méthode fréquentielle du bruit généré par frottement.
Notre approche s’est focalisée sur les éléments essentiels impliqués dans la génération du
son lors du frottement entre l’avant-bras et le tronc d’un individu en marche. Cette partie a été
détaillé dans le deuxième chapitre, où nous nous sommes concentrés sur les paramètres qui sont
impliqués dans le frottement sous l’emmanchure du vêtement. Conscient de la complexité du
mouvement du corps humain, nous ne nous sommes intéressés qu’au mouvement en lui-même
sans aborder les aspects physiologique ou dynamique, en se limitant au déplacement de la
partie supérieure du corps humain. Nous avons obtenus expérimentalement des paramètres qui
correspondent au mode (marche (2km/h), jogging (7km/h) et course (9km/h)) et qui ont permis
de définir les vitesses du frottement, les surfaces de frottement et les pressions de frottement.
Les méthodes utilisées pour l’obtention des résultats des vitesses de mouvement et de
surface de frottement, se sont basées sur des méthodes de capture d’images et de séquences de
films utilisées le plus souvent pour l’étude des mouvement du corps humain dans le domaine
du sport de haut niveau et dans le domaine de la biomécanique. La pression a été obtenue par
des capteurs de pression flexibles intégrable dans un vêtement et par traitement du signal
obtenu par plusieurs essais réalisés avec des volontaires sur un tapis de course.

Chapitre 5 : Conclusion Et Perspectives
131
Les essais expérimentaux ont montré que la surface et la pression de frottement augmentent
avec la vitesse de frottement. Ces paramètres sont spécifiques pour les modes de mouvement
choisis pour cette étude.
Le protocole qui a été défini dans ce chapitre, reste valide pour d’autres modes de
mouvement. Ces méthodes ont été mises au point pour définir les paramètres indispensables à
la conception et la réalisation d’un instrument expérimental. Le choix de concevoir et de
réaliser un tel instrument était fondé par l’inexistence d’un dispositif qui reproduise fidèlement
le mouvement réel du frottement.
Nous avons conçu et fabriqué cet instrument dans notre atelier mécanique. Les étapes du
travail réalisé sont détaillées dans le troisième chapitre. Il est constitué de trois parties
essentielles :
Une partie mécanique, assurant le mouvement du balayage du porte-échantillon mobile
sur le porte-échantillon fixe,
Une enceinte acoustique, isolant les deux porte-échantillons de la partie mécanique,
Une chaîne d’enregistrement (microphone, préamplificateur et amplificateur), un
enregistreur et un logiciel de traitement des enregistrements.
La partie mécanique de l’instrument est conçue et réalisée par des pièces en alliage
d’aluminium. L’enceinte acoustique est conçue en bois aggloméré avec une isolation par
mousse alvéolaire en polyuréthane, collée sur toutes les parois intérieures. Durant la réalisation
de la partie mécanique, nous avons observé une vibration du porte échantillon pour la vitesse la
plus élevée des essais. Pour remédier à ce problème, nous avons amélioré le mécanisme par
changement de l’accouplement rigide du moteur par un accouplement flexible en alliage
d’aluminium. Les pièces portant la tige et la pièce du porte échantillon ont été remplacées, par
des pièces ayant une épaisseur supérieure aux pièces du premier prototype. La liaison entre les
pièces qui était assurée par une rotule a été remplacée par une liaison fixe. Le socle de la partie
mécanique a été profondément remanié : il a été monté sur un cadre fabriqué en profilé avec
quatre pieds réglables portant des embouts en caoutchouc à leur extrémité.

Chapitre 5 : Conclusion Et Perspectives
132
Une autre contrainte est apparue due au phénomène des fréquences stationnaires à
l’intérieur de l’enceinte acoustique durant les acquisitions sonores, qui gênait les
enregistrements du son de frottement. Le comportement des ondes sonores est en effet affecté
par les dimensions, la forme et la matière de l’isolation de l’enceinte acoustique. Nous avons
remédié à ce problème par l’augmentation des dimensions de l’enceinte acoustique. Les calculs
comparatifs de la résonance entre les deux enceintes acoustiques ont montré le décalage des
fréquences stationnaires dans la bande des basses fréquences. Étant donné que nous allons se
baser sur les moyennes et hautes fréquences pour le textile, la résonance ne va pas affecter les
enregistrements des frottements des tissus.
Comme il s’agissait d’un premier travail dans ce domaine, les essais menés pour la
conception et la réalisation de cet instrument ont pris une grande part de notre étude, en
commençant par la mise en place du protocole d’essais de l’étude du mouvement de l’avant
bras, pour aller jusqu’aux essais d’atténuation de l’enceinte acoustique. Nous avons aussi fait
les conceptions de toutes les composantes mécaniques et acoustiques de l’instrument. Nous
avons réalisé, monté et ajusté l’instrument final. Les essais de l’atténuation de l’enceinte
acoustique ont été réalisés dans une chambre sourde dans un champ diffus10
avec un bruit rose7.
L’enceinte a une bonne atténuation dans les moyennes et hautes fréquences ce qui correspond
aux exigences de nos travaux.
Nous avons testé dans un premier temps la reproductibilité par plusieurs enregistrements
menés dans les mêmes conditions. Les résultats obtenus pour un tissu en
polyamide/polyuréthane se sont avérés concluants. Un mode opératoire de reproductibilité du
frottement des échantillons avec un temps d’enregistrement adéquat a été établi puis appliqué
en tant que protocole d’essai pour les différents échantillons tissus testés par la suite.
La méthode de mesure a consisté à frotter deux tissus identiques et enregistrer le bruit
généré par un microphone positionné au dessus de la zone de frottement durant 10 s. Ces essais
nous ont permis de valider la méthode que nous avons proposée de simulation du mouvement
de frottement de l’avant-bras par un instrument, et d’enregistrer le son de façon rapide pour
plusieurs échantillons. Les manipulations de montage et de démontage des porte- échantillons
se sont avérées aisées et rapides.

Chapitre 5 : Conclusion Et Perspectives
133
La seconde étude menée dans la partie finale, a consisté à étudier de l’influence des
paramètres tels que la vitesse et la surface de frottement sur l’amplitude du niveau du son
obtenu. Pour les trois tissus d’armure toile, ayant des matières différentes : un tissu en
polyamide/polyuréthane, un tissu en coton /élasthanne et un tissu en soie. Nous avons quantifié
trois paramètres sonores par l’analyse des spectres acoustiques obtenus du frottement de ces
tissus :
La pression du niveau acoustique totale (LPT) en dB,
La plage de niveau sonore (ΔL) en dB,
L’écart de fréquence ( Δf) en Hz.
Après un traitement de données pour les enregistrements, les résultats obtenus révèlent un
important niveau de bruit pour le tissu en polyamide / polyuréthane comparativement avec les
deux autres tissu. Cependant nous ne pouvons conclure que cela est dû à la différence de la
matière du support textile, puisque le seul paramètre identique entre ces trois tissu était
l’armure.
Nous avons constaté une influence de la vitesse du frottement sur le niveau du bruit pour
les trois tissus mais, d’une différence en dB faible. De façon générale, le niveau du bruit
augment quand la vitesse de frottement augmente.
En ce qui concerne l’influence de la surface sur le niveau de bruit du frottement, nous
avons constaté qu’il augmente pour les trois tissus lorsque la surface frottée augmente ; mais
avec une faible différence en dB.
Il est important de relever que les empreintes acoustiques sont totalement différentes entre
tous les tissus testés et mettent en évidence les différences de matière et de texture, ce qui
laisse à dire qu’elle peut être spécifique à leurs caractéristiques techniques.

Chapitre 5 : Conclusion Et Perspectives
134
2. Perspectives
Plusieurs perspectives peuvent être envisagées pour poursuivre ce travail. Tout d’abord, la
validation expérimentale devra être poursuivie en prenant en compte les vitesses, les surfaces et
les pressions pour des échantillons ayant les mêmes caractéristiques techniques à l’exception
d’un seul. Cela aidera énormément à établir d’éventuelles corrélations entre les paramètres
acoustiques et les paramètres du support textile.
Cette étude nous a conduit à développer un instrument de simulation du mouvement de
l’avant-bras par des méthodes expérimentales pour des conditions réelles. Nous proposons de
suivre la même démarche pour définir les conditions du mouvement des jambes, en prenant la
vitesse de marche de 3 à 5 km/h et d’utiliser une caméra à infra-rouge pour identifier les
surfaces du frottement ou une poudre réfléchissante à la lumière noire pour avoir plus de
précision que la peinture à eau.
Il serait également envisageable de faire une étude comparative des bruits obtenus par les
conditions du mouvement de l’avant-bras et des bruits obtenus par les conditions du
mouvement des jambes, pour le même support textile. Cela donnera une idée sur le niveau du
bruit le plus élevé qui sera entendu par l’individu.
Pour augmenter la précision des enregistrements, nous proposons d’installer un
accéléromètre sur le porte-échantillon. Ceci permettra de relever la vitesse du mouvement
durant les essais sans arrêt de l’enregistreur. Cette méthode permettra ainsi de donner plus de
précision aux résultats obtenus et sera utile notamment pour analyser l’influence de la variation
de la vitesse sur le niveau de bruit, puisqu’ils seront pris dans le même intervalle de temps et
dans les mêmes conditions d’essais.
En ce qui concerne le dispositif de frottement, il pourrait s’avérer intéressant de mettre un
capteur de pression directement sur la plaque de silicone sous l’échantillon, pour avoir le signal
de pression en temps réel au cours des essais. Cela aidera à savoir à quelle pression nous étions
sur une période d’enregistrement. Il pourrait être intéressant d’utiliser également une matière en
silicone pour recouvrir le porte-échantillon mobile.

Chapitre 5 : Conclusion Et Perspectives
135
L’amélioration de l’enceinte acoustique peut être elle aussi envisageable par une double
cloison des parois de l’extérieur avec une couche de fibre de verre entre eux. En effet,
l’isolation obéit à la loi de la masse des parois et un tel renforcement contribuerait de façon
positive à l’isolation acoustique de l’enceinte.
Enfin, les enregistrements obtenus par cet instrument du frottement des échantillons de
textile pourraient être rassemblés dans une base de donnés pour une étude sensorielle de la
perception du son. Cette étude devrait être menée par un panel, entrainé ou non selon que l’on
souhaiterait procéder à une analyse descriptive quantitative des sons perçus ou une étude
hédonique.

Références bibliographiques
136
RÉFÉRENCES BIBLIOGRAPHIQUES
[1] B. C. Ellis et R. K. Garnsworthy, « A Review of Techniques for the Assessment of
Hand. », Textile Research Journal, p. 231‑238, 1980.
[2] V 09-001, « Analyse sensorielle. Méthodologie, directives générales. », AFNOR, 1983.
[3] ISO 5492 : 1992, « Analyse sensorielle-Vocabulaire. » 1992.
[4] ISO 6658 : 1985, « Analyse sensorielle. Méthodologie-guide général. »
[5] F. Philippe, L. Schacher, D. A. Dominique, et C. Dacremont, « Tactile Feeling: Sensory
Analysis Applied to textile goods. », Textile Research Journal, vol. 74(12), p. 1066‑1072,
2004.
[6] S. Ben Said, « Contribution à l’évaluation par analyse sensorielle du toucher des étoffes,
influence des parametres de structure, interaction vue/toucher », Thèse de doctorat.
Université de Haute Alsace, Mulhouse, 2007.
[7] A. Akay, « Acoustics of friction », J. Acoust. Soc. Am., vol. 111, p. 1525‑1548, 2002.
[8] M. O. Othman, A. H. Elkholy, et A. A. Seireg, « Experimental investigation of frictional
noise and surface-roughness characteristics », Experimental Mechanics, vol. 30 (4), p.
328–331, 1990.
[9] C. Kim et G. Cho, « Effects of Basic Weave Differences in Silk Fabric and Yarn Type
Variations in Satin Weave on Sound Parameters », Textile Research Journal, vol. 72(6), p.
555‑560, 2002.
[10] C. Kim et G. Cho, « Characteristics of Rustling Sound Created by the Structure of
Polyester Warp Knitted Fabrics », Textile Research Journal, vol. 73(8), p. 685‑691, 2003.
[11] J. R. Hassall, K. Zaveri, et M. Phil, Acoustic Noise Measurements, Brüel & Kjaer. 1979.
[12] F. Alton Everest, Master Handbook of Acoustics, McGraw-Hill. 2001.
[13] R. Franck, Silk, Mohair, Cashmere, and Other Luxury Fibers, The Textile Institute. 2001.
[14] http://memotextile.free.fr/.
[15] J. Müssig, Industrial Application of Natural Fibers, WILEY. 2010.
[16] C. Breugnot, « Contribution à la caractérisation mécanique du toucher des surfaces
textiles à partir de critères neurosensoriels », Thèse de doctorat. Université de Haute
Alsace, Mulhouse, 2005.
[17] ISO 8388 : 1998, « Etoffes à mailles- Types-Vocabulaire ».

Références bibliographiques
137
[18] J. M. Praëne, « Modélisation phénomenologique du comportement tribologique des
surfaces textiles », Thèse de doctorat. Université de Haute Alsace, Mulhouse, 2007.
[19] ISO 9092 : 2011, « Textiles-Nontissés-Définition. »
[20] ISO 139 : 2005, « Textiles-Atmosphères normales de conditionnement et d’essai. »
[21] NF G07-316 : 1988, « Essais des fils. Détermination de la masse linéique. »
[22] ISO 17202 : 2002, « Détermination de la torsion de filés de fibres simples. Méthode
détorsion / retorsion », 2002.
[23] NF G07-155 : 1984, « Détermination du nombre de fils par unité de longueur. »
[24] NF G07-150 : 1984, « Essais des étoffes. Détermination de la masse surfacique des tissus
et des tricots. »
[25] ISO 7211-1 : 1984, « Textiles-Tissu-Construction. Méthodes d’analyse. Partie 1 :
Représentation du dessin d’armure, du rentrage, du piquage au peigne et du levage. »
[26] G. Amontons, « Les frottements des machines. Histoire de l’Académie royale des
sciences. Paris. », 1699. .
[27] C. A. Coulomb, « Théorie des machines simples. Mémoire de mathématique et de
physique de l’académie royale des Sciences, Paris. », 1781. .
[28] M. Cartier et P. Kapsa, Usure des contacts mécaniques. Techniques Ingénieur, 2001.
[29] F. P. Bowden et D. Tabor, « The Friction and Lubrication of Solids.Oxford University
Press. », 1950. .
[30] M. Ciavarella, J. A. Greenwood, et M. Paggi, « Inclusion of “interaction” in the
Greenwood and Williamson contact theory », Wear, vol. 265, no 5‑6, p. 729‑734, août
2008.
[31] A. Le Bot et E. Bou Chakra, « Measurement of Friction Noise Versus Contact Area of
Rough Surfaces Weakly Loaded », Laboratoire de tribologie et dynamique des systèmes
Ecole centrale de Lyon, vol. 37, no 2, p. 273‑281, sept. 2009.
[32] F. Moirot et Q.-S. Nguyen, « An example of stick–slip waves », Comptes Rendus de
l’Académie des Sciences-Series IIB-Mechanics, vol. 328, no 9, p. 663–669, 2000.
[33] H. Zahouani, G. Boyer, C. Pailler-Mattei, M. Ben Tkaya, et R. Vargiolu, « Effect of
human ageing on skin rheology and tribology », Wear, vol. 271, no 9‑10, p. 2364‑2369,
juill. 2011.
[34] A. Le Bot, H. Zahouani, R. Vargiolu, et A. Mavon, « Assessment of the smoothness of
surfaces with an acoustical probe. », 14th international congress on sound and vibration.
Australia., 2007.

Références bibliographiques
138
[35] B. L. Stoimenov, Suguru Maruyama, K. Adachi, et K. Kato, « The roughness effect on the
frequency of frictional sound », Tribology International., vol. 40, no 4, p. 659‑664, avr.
2007.
[36] M. Yokoi et M. Nakai, « A Fundamental Study on Frictional Noise (1st report, The
generating mechanism of rubbing noise and squeal noise) », Japan Society of Mechanical
Engineers, vol. 22, no 173, p. 1665‑1671, 1979.
[37] M. Yokoi et M. Nakai, « A Fundamental Study on Frictional Noise (5th report, the
influence of surface roughness on frictional noise) », The Japan society of mechanical
engineer, vol. 25, no 203, p. 827‑833, 1982.
[38] T. Jibiki, M. Shima, H. Akita, et M. Tamura, « A basic study of friction noise caused by
fretting », Wear, vol. 251, no 1, p. 1492–1503, 2001.
[39] H. Ben Abdelounis, A. Le Bot, H. Zahouani, et J. Perret-Liaudet, « Etude du bruit de
rugosité lors d’un contact plan/plan. », 18ème Congrès Français de Mécanique
(Grenoble), 2007.
[40] D. Wilson, « A study of fabric-on-fabric dynamic friction », Journal of Textile Institute,
vol. 54, no 4, p. T143‑T155, 1963.
[41] D. Aliouche, « Contribution à l’étude des mécanismes de frottement des étoffes. », Thèse
de doctorat. Université de Haute Alsace, Mulhouse, 1991.
[42] S. Dia, « Modélisation d’un contact dynamique non-linéaire. Application au
développement et à l’optimisation de modalsens », Thèse de doctorat. Université de Haute
Alsace, 2010.
[43] S. Dia, S. Fontaine, et M. Renner, « Using Recurrence Plots for Determinism Analysis of
Blade-Disk Tribometer », Experimental Techniques, vol. 36, no 1, p. 26‑33, janv. 2012.
[44] H. G. Howell, « The friction of a fibre round a cylinder and its dependence upon cylinder
radius », Journal of Textile Institute, vol. 45, no 8, p. T575‑T579, 1954.
[45] H. G. Howell et J. Mazur, « Amontons laws and fiber friction », Journal of Textile
Institute, vol. 44, p. T59‑69, 1953.
[46] H. G. Howell, « Inter-Fiber friction », Journal of Textile Institute, no 42, p. T521‑T533.
[47] L. J. Postle et J. Ngham, « The mesurement of inter-fibre friction in slivers », Journal of
Textile Institute, p. T77‑T90, 1952.
[48] J. A. Morrow, « Friction properties of cotton materials », Journal of Textile Institute, no
22, p. 425‑440, 1931.
Références bibliographiques
139
[49] S. Kawabata, R. Postle, et M. Niwa, « Objective specification of fabric quality,
mechanical properities and performance. », The textile machinery society of Japan, p. 1‑29, 1982.
[50] S. Kawabata, « The standardization and analysis of hand evaluation ». The Textile
Machinery Society of Japan, 1980.
[51] J. T. Walter, « The spectral distribution of sound produced by fibers and fabrics in
friction. Part I : Improved instrumentation », Textile Research Journal, p. 804‑809, 1961.
[52] P. S. Veneklasen et F. Jorgensen, Brevet N°2922303, U.S.A, 1960.
[53] J. T. Walter, « Variation with fabric hand, fuzziness, wrinkledness, and textile mechanical
and finishing processes », Textile Research Journal, p. 670‑676, 1962.
[54] Eunjou Yi and Gilsoo Cho, « Fabric Sound parameters and their relationship with
mechanical properties », Textile Research Journal, vol. 70(9), p. 828‑836, 2000.
[55] Eunjou Yi and Gilsoo Cho, « Sound generator », Brevet N° 10-0671017, Coréen, 2006.
[56] S. Sukigara et T. Ishibashi, « Subjective evaluation of the rustling sound of fabrics »,
Sen’i Gakkaishi, vol. 57, no 9, p. 264‑269, 2001.
[57] G. Cho, « Physiological and Subjective Evaluation of the Rustling Sounds of Polyester
Warp Knitted Fabrics », Textile Research Journal, vol. 75, no 4, p. 312‑318, avr. 2005.
[58] Y. Na et G. Cho, « Variations in Sensibility to Fabric Frictional Sound by Fiber Type and
Subject », Textile Research Journal, vol. 73, no 9, p. 837‑842, sept. 2003.
[59] J. Cho et G. Cho, « Determining the Psychoacoustic Parameters That Affect Subjective
Sensation of Fabric Sounds at Given Sound Pressures », Textile Research Journal,
vol. 77, no 1, p. 29‑37, janv. 2007.
[60] V. S. Moholkar et C. G. Warmoeskerken, « Acoustical Characteristics of Textile
Materials », Textile Research Journal, vol. 73, no 9, p. 827‑837, sept. 2003.
[61] C. Kim, G. Cho, H. Yoon, et S. Park, « Characteristics of Rustling Sounds Created by the
Structure of Polyester Warp Knitted Fabrics », Textile Research Journal, vol. 73, no 8, p.
685‑691, août 2003.
[62] « Instrumented Analysis of Human Movement ». [En ligne]. Disponible sur:
http://www2.brooklyn.liu.edu/bbut04/adamcenter/Instrumented%20Analysis%20Website/
.
[63] L.-C. Kuo, F.-C. Su, H.-Y. Chiu, et C.-Y. Yu, « Feasibility of using a video-based motion
analysis system for measuring thumb kinematics », Journal of biomechanics, vol. 35, no
11, p. 1499–1506, 2002.

Références bibliographiques
140
[64] http://goldberg.berkeley.edu/courses/.
[65] S. H. Collins, P. G. Adamczyk, et A. D. Kuo, « Dynamic arm swinging in human
walking », Proceedings of the Royal Society B: Biological Sciences, vol. 276, no 1673, p.
3679‑3688, juill. 2009.
[66] http://www.dartfish.com/.
[67] http://inkscape.org/.
[68] M. Kechiche, « Etude et développement de capteurs/effecteurs filamentaires de faibles
diamètres integrables dans des structures textiles », Thèse de doctorat. Université de
Haute Alsace, Mulhouse, 2012.
[69] A. Shafi, « Contribution to the study and the caracterization of embedded connections in textile structure case of embroidery », Thèse de doctorat. Université de Haute Alsace,
2013.
[70] K. Yosouf et A. Shafi, « Effect of stitch density on shear properties of embroidered
metallic circuit and impact of pressure on sensor during movement », 6th International
Textile, Clothing & Design Conference, at Dubrovnik, Croatia, 2012.
[71] http://www.tekscan.com/a401-force-sensor-released.
[72 http://www.ni.com/labview/signalexpress/f/.
[73] http://www.proengineer.com/.
[74] http://www.acouphile.fr/.
[75] http://www.antibruit.org/echelle.htm.

141
CHAPITRE 6
ANNEXES

142
SOMMAIRE DES ANNEXES
ANNEXE 1 : Spectres sonores des tissus ……………………………………144
Spectre sonore pour le tissu T4 en polyester……………………………145
Spectre sonore pour le tissu T5 en Laine……………………………….146
Spectre sonore pour le tissu T6 en viscose / élasthanne………………...147
Spectre sonore pour le tissu T7 en coton /polyester…………………….148
Spectre sonore pour le tissu T8 en coton……………………………….149
Spectre sonore pour le tissu T9 en coton ………………………………...150
Spectre sonore pour le tissu T10 en coton ………………………………151
Spectre sonore pour le tissu T11 en coton………………………………. 152
Spectre sonore pour le tissu T12 en coton………………………………. 153
Spectre sonore pour le tissu T13 en polyester……………………………154
Spectre sonore pour le tissu T14 en polyester……………………………155
Spectre sonore pour le tissu T15 en polyester……………………………156
ANNEXE 2 : Dessins des pièces de l’instrument expérimental………………157
Instrument expérimental 3D……………………………………………..158
Instrument expérimental…………………………………………………159

143
Partie mécanique…………………………………………………………160
Plateau……………………………………………………………………161
Pièce plate………………………………………………………………...161
Support règle métallique………………………………………………… 162
Disque de support………………………………………………………...162
Moteur électrique…………………………………………………………163
Pièce filetée………………………………………………………………163
Rotule en acier……………………………………………………………164
Cornière…………………………………………………………………..164
Disque…………………………………………………………………….165
Pièce filetée M8…………………………………………………………..165
Pièce en Téflon…………………………………………………………...166
Tube fileté M6…………………………………………………………...166
Tige en acier………………………………………………………………167
Rondelle métallique………………………………………………………167
Profilé pour enceinte Acoustique………………………………………...168
Rail de guidage…………………………………………………………...168
Coussinet en bronze………………………………………………………169

144
Bague de serrage………………………………………………………….169
Joint en caoutchouc……………………………………………………….170
Tige en acier………………………………………………………………170
Accouplement…………………………………………………………….171
Tige……………………………………………………………………….171
Profilé pour support du socle……………………………………………..172
Profilé 40x40……………………………………………………………..172
Profilé pour enceinte acoustique…………………………………………173
Profilé 40x40……………………………………………………………..173
Planche en bois (dessous)………………………………………………...174
Planche en bois (dessus)………………………………………………….174
Planche en bois (face latérale)……………………………………………175
Planche en bois (porte)…………………………………………………...175
ANNEXE 3 :
Perception du son…………………………………………………………177
ANNEXE 4 : Fiches techniques………………………………………………179
Fiche technique du capteur de force FlexiForce…………………………180
Fiche technique du Microphone Preamplifier Type 2669……………….181
Fiche technique de la mousse acoustique…………………………………185

145
ANNEXE 1
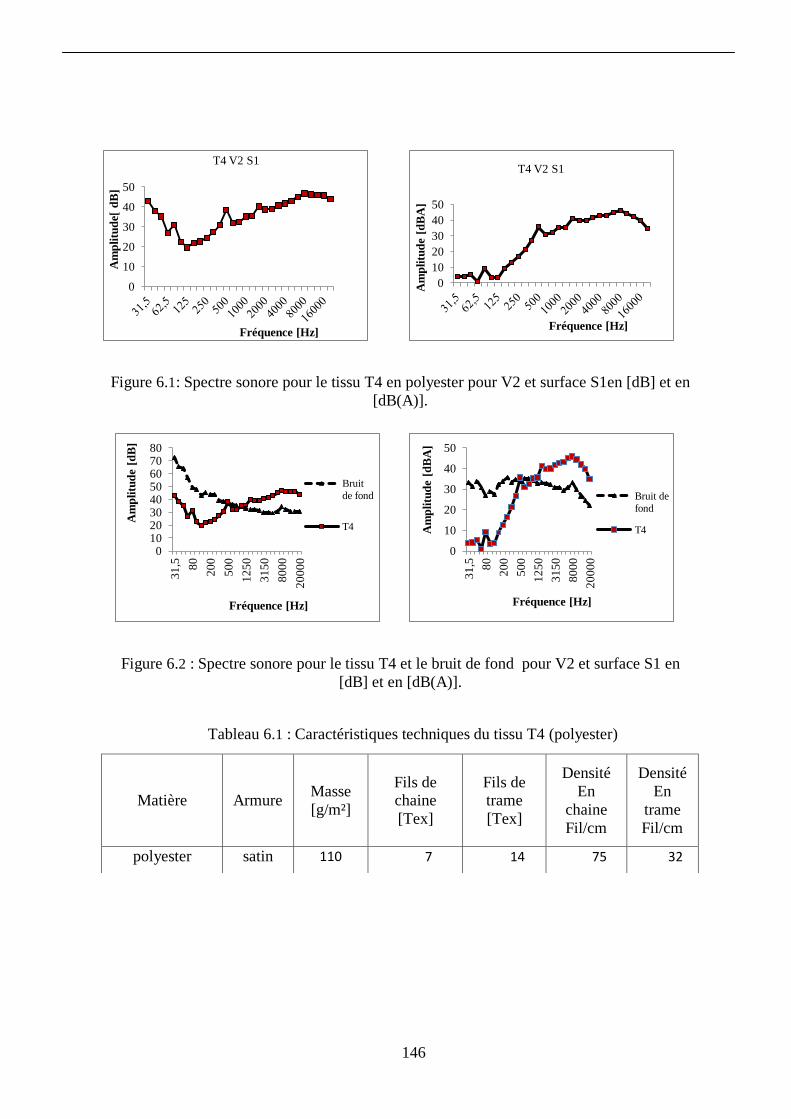
146
Figure 6.1: Spectre sonore pour le tissu T4 en polyester pour V2 et surface S1en [dB] et en
[dB(A)].
Figure 6.2 : Spectre sonore pour le tissu T4 et le bruit de fond pour V2 et surface S1 en
[dB] et en [dB(A)].
Tableau 6.1 : Caractéristiques techniques du tissu T4 (polyester)
Matière Armure Masse
[g/m²]
Fils de chaine
[Tex]
Fils de trame
[Tex]
Densité
En
chaine
Fil/cm
Densité
En
trame
Fil/cm
polyester satin 110 7 14 75 32
0
10
20
30
40
50
Am
pli
tud
e[ d
B]
Fréquence [Hz]
T4 V2 S1
0
10
20
30
40
50
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
T4 V2 S1
0 10 20 30 40 50 60 70 80
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit
de fond
T4
0
10
20
30
40
50
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit de
fond
T4

147
Figure 6.3 : Spectre sonore pour le tissu T5 en Laine pour V2 et surface S1 en [dB] et en
[dB(A)].
Figure 6.4 : Spectre sonore pour le tissu T5et le bruit de fond pour V2 et surface S1 en [dB]
et en [dB(A)].
Tableau 6.2 : Caractéristiques techniques du tissu T5 (Laine)
Matière Armure Masse
[g/m²]
Fils de
colonne
[Tex]
Fils de
rangée
[Tex]
Densité
En
colonne
Densité
En
rangée
Laine maille 276 / / 22 19
0
10
20
30
40
50
Am
pli
tud
e [
dB
]
Fréquence [Hz]
T 5V2 S1
-10 0
10 20 30 40 50
31
,5
62
,5
12
5
25
0
50
0
10
00
20
00
40
00
80
00
16
00
0 A
mp
litu
de
[dB
A]
Fréquence [Hz]
T 5 V2 S1
0
10
20
30
40
50
60
70
80
31
,5
62
,5
12
5
25
0
50
0
10
00
20
00
40
00
80
00
16
00
0
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit
de
fond
T5
-10
0
10
20
30
40
50
31
,5
62
,5
12
5
25
0
50
0
10
00
20
00
40
00
80
00
16
00
0
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit de
fond
T5
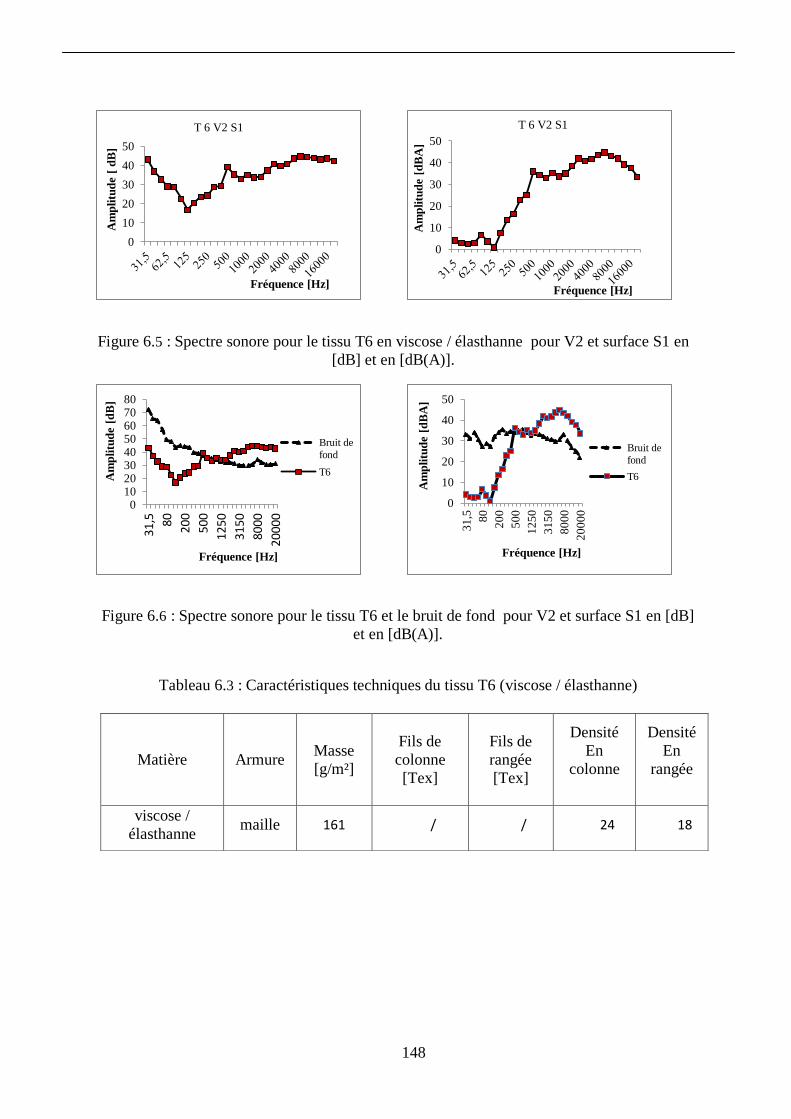
148
Figure 6.5 : Spectre sonore pour le tissu T6 en viscose / élasthanne pour V2 et surface S1 en
[dB] et en [dB(A)].
Figure 6.6 : Spectre sonore pour le tissu T6 et le bruit de fond pour V2 et surface S1 en [dB]
et en [dB(A)].
Tableau 6.3 : Caractéristiques techniques du tissu T6 (viscose / élasthanne)
0
10
20
30
40
50
Am
pli
tud
e [
dB
]
Fréquence [Hz]
T 6 V2 S1
0
10
20
30
40
50
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
T 6 V2 S1
0 10 20 30 40 50 60 70 80
31,5
80
200
500
1250
3150
8000
2000
0
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit de
fond
T6
0
10
20
30
40
50
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit de
fond
T6
Matière Armure Masse
[g/m²]
Fils de
colonne
[Tex]
Fils de
rangée
[Tex]
Densité
En
colonne
Densité
En
rangée
viscose /
élasthanne maille 161 / / 24 18

149
Figure 6.7 : Spectre sonore pour le tissu T7 en coton / polyester pour V2 et surface S1 en
[dB] et en [dB(A)].
Figure 6.8 : Spectre sonore pour le tissu T7et le bruit de fond pour V2 et surface S1 en
[dB] et en [dB(A)].
Tableau 6.4 : Caractéristiques techniques du tissu T7 (coton / polyester)
Matière Armure Masse
[g/m²]
Fils de
chaine
[Tex]
Fils de
trame
[Tex]
Densité
En chaine
Fil/cm
Densité
En trame
Fil/cm
coton / polyester Toile 114 9 33 85 40
0
10
20
30
40
50
60
70
Am
pli
tud
e [
dB
]
Fréquence [Hz]
T7 V2 S1
0 10 20 30 40 50 60
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
T7 V2 S1
0 10 20 30 40 50 60 70 80
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit de
fond
T7
0
10
20
30
40
50
60
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit
de fond
T7

150
Figure 6.9 : Spectre sonore pour le tissu T8 en coton pour V2 et surface S1 en [dB] et en
[dB(A)].
Figure 6.10 : Spectre sonore pour le tissu T8 et le bruit de fond pour V2 et surface S1 en
[dB] et en [dB(A)]
Tableau 6.5 : Caractéristiques techniques du tissu T8 (coton)
Matière Armure Masse
[g/m²]
Fils de
chaine
[Tex]
Fils de
trame
[Tex]
Densité
En chaine
Fil/cm
Densité
En trame
Fil/cm
coton Toile 112 13 11 53 32
0
10
20
30
40 3
1,5
62
,5
12
5
25
0
50
0
10
00
20
00
40
00
80
00
16
00
0
Am
pli
tud
e [
dB
]
Fréquence [Hz]
T 8 V2 S1
-40
-20
0
20
40
60
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
T 8 V2 S1
0 10 20 30 40 50 60 70 80
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit de
fond
T8
-30 -20 -10
0 10 20 30 40 50
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit de
fond
T8

151
Figure 6.11 : Spectre sonore pour le tissu T9 en coton pour V2 et surface S1 en [dB] et en
[dB(A)].
Figure 6.12 : Spectre sonore pour le tissu T9 et le bruit de fond pour V2 et surface S1 en
[dB] et en [dB(A)].
Tableau 6.6 : Caractéristiques techniques du tissu T9 (coton)
Matière Armure Masse
[g/m²]
Fils de
chaine
[Tex]
Fils de
trame
[Tex]
Densité
En chaine
Fil/cm
Densité
En trame
Fil/cm
coton Toile 111 15 11 72 33
0
10
20
30
40
50
60
Am
pli
tud
e [
dB
]
Fréquence [Hz]
T 9 V2 S1
0 10 20 30 40 50 60
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
T 9 V2 S1
0 10 20 30 40 50 60 70 80
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit de
fond
T9 0
10
20
30
40
50
60
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit
de
fond
T9

152
Figure 6.13 : Spectre sonore pour le tissu T10 en coton pour V2 et surface S1 en [dB] et
en [dB(A)].
Figure 6.14 : Spectre sonore pour le tissu T10 et le bruit de fond pour V2 et surface S1 en
[dB] et en [dB(A)].
Tableau 6.7 : Caractéristiques techniques du tissu T10 (coton)
Matière Armure Masse
[g/m²]
Fils de
chaine
[Tex]
Fils de
trame
[Tex]
Densité
En chaine
Fil/cm
Densité
En trame
Fil/cm
coton Toile 113 12 13 52 34
0
10
20
30
40
50
Am
pli
tud
e [
dB
]
Fréquence [Hz]
T 10 V2 S1
0
10
20
30
40
50
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
T 10 V2 S1
0 10 20 30 40 50 60 70 80
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit de
fond
T10 0
10
20
30
40
50
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit de
fond
T10

153
Figure 6.15 : Spectre sonore pour le tissu T11 en coton pour V2 et surface S1 en [dB] et
en [dB(A)].
Figure 6.16 : Spectre sonore pour le tissu T11 et le bruit de fond pour V2 et surface S1 en [dB]
et en [dB(A)].
Tableau 6.8 : Caractéristiques techniques du tissu T11 (coton)
Matière Armure Masse
[g/m²]
Fils de
chaine
[Tex]
Fils de
trame
[Tex]
Densité
En
chaine
Fil/cm
Densité
En
trame
Fil/cm
coton Toile 92 7 7 80 50
0
10
20
30
40
50
60 3
1,5
62
,5
12
5
25
0
50
0
10
00
20
00
40
00
80
00
16
00
0
Am
pli
tud
e [
dB
]
Fréquence [Hz]
T11 V2 S1
-10
0
10
20
30
40
50
60
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
T11 V2 S1
0 10 20 30 40 50 60 70 80
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit de
fond T11
-10
0
10
20
30
40
50
60
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit de
fond
T11

154
Figure 6.17 : Spectre sonore pour le tissu T12 en coton pour V2 et surface S1 en [dB] et en
[dB(A)].
Figure 6.18 : Spectre sonore pour le tissu T12 et le bruit de fond pour V2 et surface S1 en
[dB] et en [dB(A)].
Tableau 6.9 : Caractéristiques techniques du tissu T12 (coton)
Matière Armure Masse
[g/m²]
Fils de
chaine
[Tex]
Fils de
trame
[Tex]
Densité
En chaine
Fil/cm
Densité
En trame
Fil/cm
coton Toile 172 15 15 53 34
0
10
20
30
40
50
60
31
,5
62
,5
12
5
25
0
50
0
10
00
20
00
40
00
80
00
16
00
0
Am
pli
tud
e [
dB
]
Fréquence [Hz]
T 12 V2 S1
0
10
20
30
40
50
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
T 12 V2 S1
0 10 20 30 40 50 60 70 80
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit
de
fond T12
0
10
20
30
40
50
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit de
fond
T12
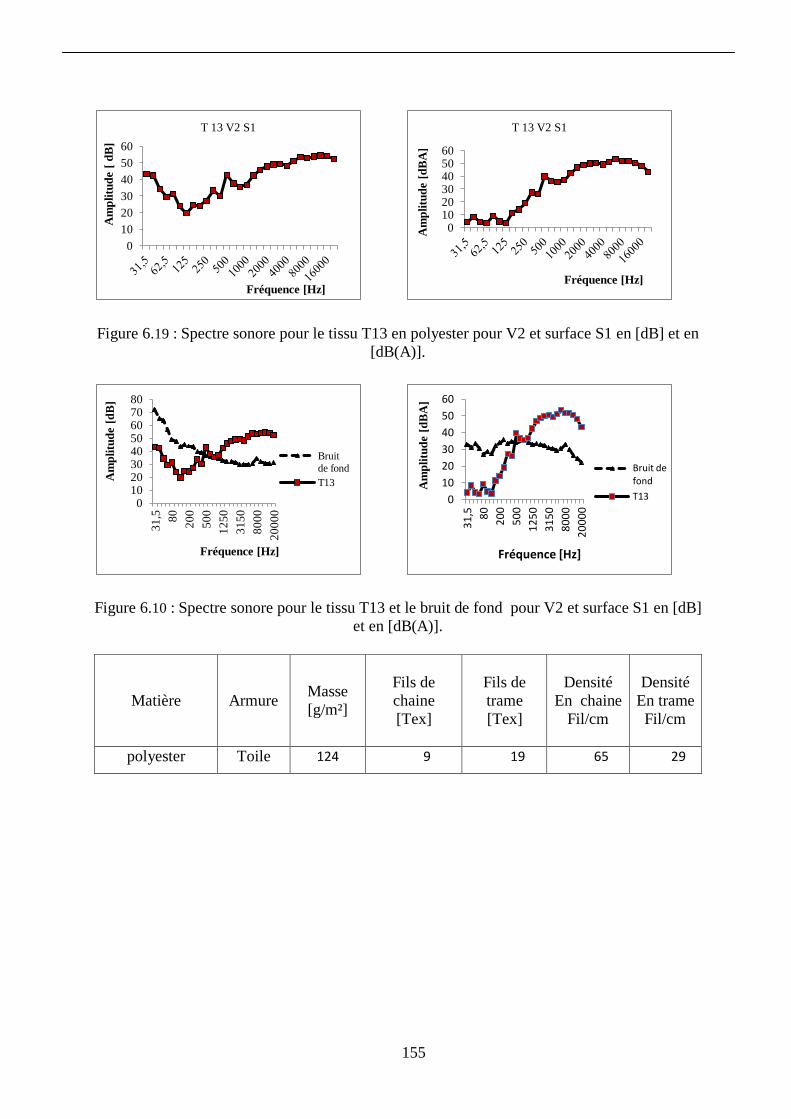
155
Figure 6.19 : Spectre sonore pour le tissu T13 en polyester pour V2 et surface S1 en [dB] et en
[dB(A)].
Figure 6.10 : Spectre sonore pour le tissu T13 et le bruit de fond pour V2 et surface S1 en [dB]
et en [dB(A)].
Matière Armure Masse
[g/m²]
Fils de
chaine
[Tex]
Fils de
trame
[Tex]
Densité
En chaine
Fil/cm
Densité
En trame
Fil/cm
polyester Toile 124 9 19 65 29
0
10
20
30
40
50
60
Am
pli
tud
e [
dB
]
Fréquence [Hz]
T 13 V2 S1
0 10 20 30 40 50 60
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
T 13 V2 S1
0 10 20 30 40 50 60 70 80
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit
de fond
T13
0
10
20
30
40
50
60
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit de fond
T13

156
Figure 6.21 : Spectre sonore pour le tissu T14 en polyester pour V2 et surface S1 en [dB] et en
[dB(A)].
Figure 6.22 : Spectre sonore pour le tissu T14 et le bruit de fond pour V2 et surface S1 en [dB]
et en [dB(A)].
Tableau 6.11 : Caractéristiques techniques du tissu T14 (polyester)
Matière Armure Masse
[g/m²]
Fils de
chaine
[Tex]
Fils de
trame
[Tex]
Densité
En chaine
Fil/cm
Densité
En trame
Fil/cm
polyester Toile 120 10 19 54 31
0
10
20
30
40
50
60
Am
pli
tud
e [
dB
]
Fréquence [Hz]
T 14 V2 S1
0 10 20 30 40 50 60
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
T 14 V2 S1
0 10 20 30 40 50 60 70 80
31
,5
62
,5
12
5
25
0
50
0
10
00
20
00
40
00
80
00
16
00
0
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit de
fond
T 14
0
10
20
30
40
50
60
31
,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit de
fond
T 14

157
Figure 6.23 : Spectre sonore pour le tissu T15 en polyester pour V2 et surface S1 en [dB] et en
[dB(A)].
Figure 6.24 : Spectre sonore pour le tissu T15 et le bruit de fond pour V2 et surface S1 en [dB] et en [dB(A)]
Tableau 6.12 : Caractéristiques techniques du tissu T15 (polyamide)
Matière Armure Masse
[g/m²]
Fils de
chaine
[Tex]
Fils de
trame
[Tex]
Densité
En chaine
Fil/cm
Densité
En trame
Fil/cm
polyamide Toile 68 8 8 44 31
0
10
20
30
40
50
60
70
Am
pli
tud
e[ d
B]
Fréquence [Hz]
T 15 V2 S1
0
20
40
60
80
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
T 15 V2 S1
0
10
20
30
40
50
60
70
80
31
,5
62
,5
12
5
25
0
50
0
10
00
20
00
40
00
80
00
16
00
0
Am
pli
tud
e [d
B]
Fréquence [Hz]
Bruit de
fond
T 15
0
10
20
30
40
50
60
70 3
1,5
80
20
0
50
0
12
50
31
50
80
00
20
00
0
Am
pli
tud
e [d
BA
]
Fréquence [Hz]
Bruit de
fond
T 15

158
ANNEXE 2

159

160

161

162

163

164

165

166
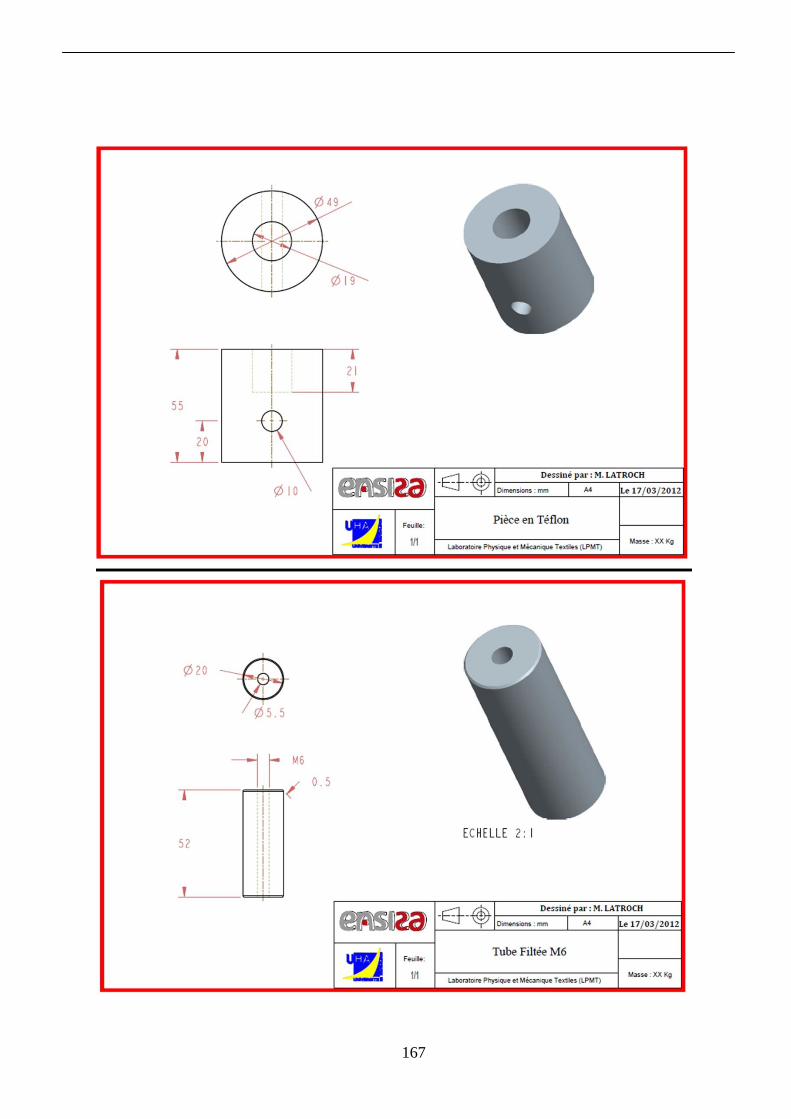
167

168

169

170

171

172

173

174

175

176

177
ANNEXE 3

178
Perception du son
L'étude de la perception humaine du son est liée étroitement à la psychologie. La Psycho
acoustique est un terme récent englobant la structure physique de l'oreille et la perception du
son. Elle met l'accent sur la structure et la fonction de l'oreille humaine.
Le mécanisme de l'audition
La réception et l'analyse du son par le mécanisme de l'audition humain, est un processus
complexe qui n'est pas encore complètement élucidé, et l'oreille elle-même est un instrument
complexe ayant d'excellente capacité de discrimination pour une large plage de fréquences et
des intensités sonores. L'oreille humaine se compose de trois parties principales, comme le
montre figure 1.
.
Figure 1. Composition de l’oreille humaine.
L’oreille externe L’oreille externe est le premier maillon de la chaîne qui constitue
l’appareil auditif. Elle reçoit les variations de pression atmosphérique et les transmet à l’oreille
moyenne. elle est composée du pavillon et du conduit auditif externe figure 1.
L’oreille moyenne L’oreille moyenne est l’élément essentiel de la transmission des
vibrations acoustiques, elle est composée principalement par la membrane tympanique et la
chaîne des osselets.

179
L’oreille interne L’oreille interne est l’organe principal de l’audition, c'est la partie de la
transduction du signal acoustique en message nerveux. Elle regroupe deux organes sensoriels
distincts: le vestibule, organe de l'équilibre et la cochlée, organe de l'audition.
Fonctionnement global de l’appareil auditif
Captées par l’oreille externe, les vibrations acoustiques sont transmises par l’oreille
moyenne au milieu liquidien de la cochlée, organe de l’audition de l’oreille interne. Au sein de
la cochlée, les vibrations provoquent la mise en mouvement des liquides et des différentes
membranes qui la constituent. Ces mouvements provoquent à leur tour l’inclinaison des
stéréocils des cellules ciliées déclenchant ainsi l’activation des fibres nerveuses. Ces dernières
transmettent alors un message électrique vers le cortex cérébral.

180
ANNEXE 4

181

182

183

184

185

186

187