multivariate interpolation decoding - algo
TRANSCRIPT

Multivariate Interpolation DecodingBeyond the Guruswami-Sudan Radius
Farzad ParvareshDepartment of Electrical Engineering
University of California San Diego
Alexander VardyDepartment of Electrical Engineering
Department of Computer ScienceDepartment of Mathematics
University of California San Diego

Reed-Solomon codes
Millions of error-correcting codes are decoded every minute,using efficient algorithms implemented in custom VLSI circuits.
About 75% of these circuits decode Reed-Solomon codes.
I.S. Reed and G. Solomon, Polynomial codes over certain finite fields,Journal Society Indust. Appl. Math. 8, pp. 300-304, June 1960.
2
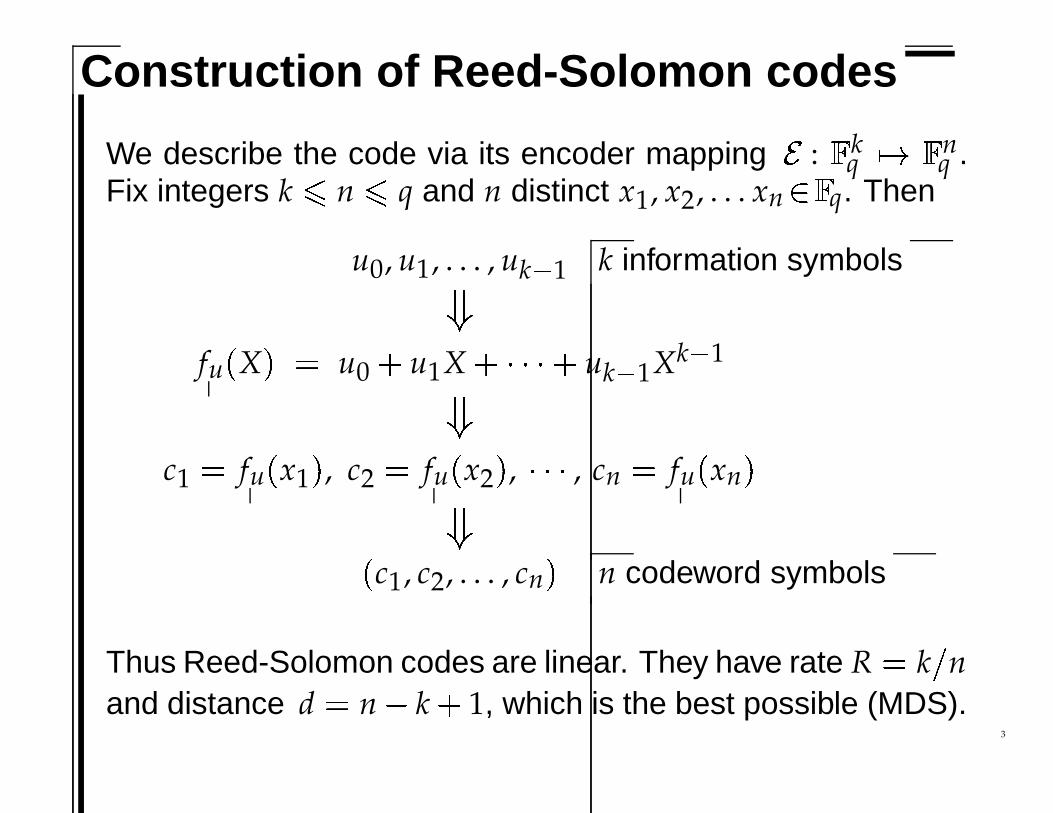
Construction of Reed-Solomon codes
We describe the code via its encoder mapping � : � kq � � � n
q .Fix integers k � n � q and n distinct x1, x2, . . . xn� � q. Then
u0, u1, . . . , uk� 1 k information symbols
fu � X � u0� u1X� � � �� uk� 1Xk� 1
c1 fu � x1 � , c2 fu � x2 � , � � � , cn fu � xn �
� c1, c2, . . . , cn � n codeword symbols
Thus Reed-Solomon codes are linear. They have rate R k nand distance d n� k� 1, which is the best possible (MDS).
3

Brief history of Reed-Solomon decoding
Invented by Reed and Solomon, 1959
Peterson-Gorenstein-Zierler, 1960
Berlekamp, 1968 and Massey, 1969
30 years!Almost
Sudan, 1997 and Guruswami-Sudan, 1999
Algebraic soft-decision decoding� �����
� ������
tn
1� R2
���
tn 1� R
4

The breakthrough: interpolation decoding
The 2002 Nevanlinna Prize went to M. Sudan with the citation “... in the theoryof error-correcting codes, Sudan’s work showed that certain coding methodscould correct many more errors than was previously thought possible.”
Berlekamp−Massey
Sudan
Guruswami−Sudan
Frac
tion
of e
rror
s co
rrec
ted
M. Sudan, Decoding of Reed-Solomon codes beyond the error correction bound,Journal of Complexity, 12, pp. 180–193, 1997.
V. Guruswami and M. Sudan, Improved decoding of Reed-Solomon and algebraic-geometric codes, IEEE Transactions on Information Theory, 45, pp. 1755–1764, 1999.
5

Key idea: bivariate interpolation
Suppose that a codeword � f � x1 � , f � x2 � , . . . , f � xn � � of a Reed-Solomon codeRSq � n, k � was transmitted and a vector � y1, y2, . . . , yn ��� � n
q was received.
Conventional decoding: constructa � � � � � � � � � � � � � � � � � � � � �univariate polynomial of degree � kthat passes through as many as possibleof the received points y1, y2, . . . , yn.
corrects up to n � 1� R2 errors
Guruswami-Sudan decoding: first constructa nonzero � � � � � � � � � � � � � � � � � �bivariate polynomial ! � X, Y � of the least
� 1, k� 1 � -weighted degree that passes through all thepoints � x1, y1 � , � x2, y2 � , . . . , � xn, yn � with prescribedmultiplicities; then find all polynomials f � X � of deg-ree � k such that ! � X, f � X � �#" 0.
corrects up to n � 1� $ R errors6
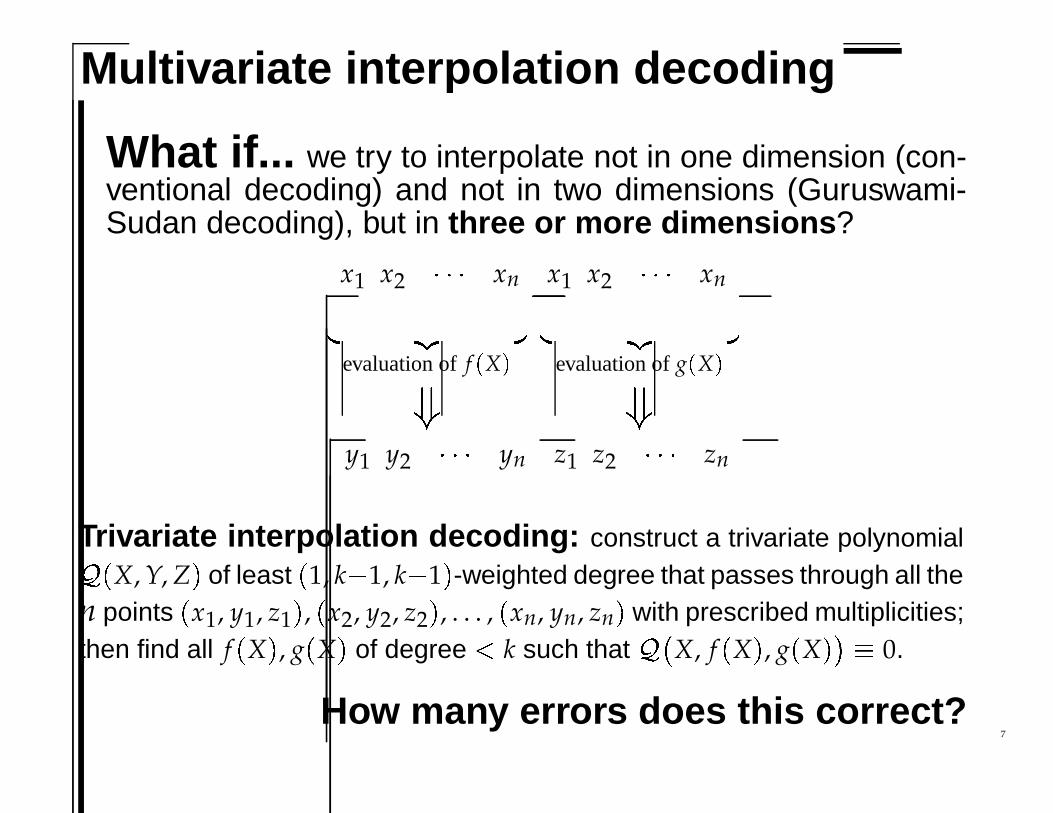
Multivariate interpolation decoding
What if... we try to interpolate not in one dimension (con-ventional decoding) and not in two dimensions (Guruswami-Sudan decoding), but in three or more dimensions?
x1 x2 % % % xn x1 x2 % % % xn
& '( )
evaluation of f * X +& '( )
evaluation of g * X +
y1 y2 % % % yn z1 z2 % % % zn
Trivariate interpolation decoding: construct a trivariate polynomial
! � X, Y, Z � of least � 1, k� 1, k� 1 � -weighted degree that passes through all then points � x1, y1, z1 � , � x2, y2, z2 � , . . . , � xn, yn, zn � with prescribed multiplicities;then find all f � X � , g � X � of degree � k such that ! � X, f � X � , g � X � �" 0.
How many errors does this correct?7
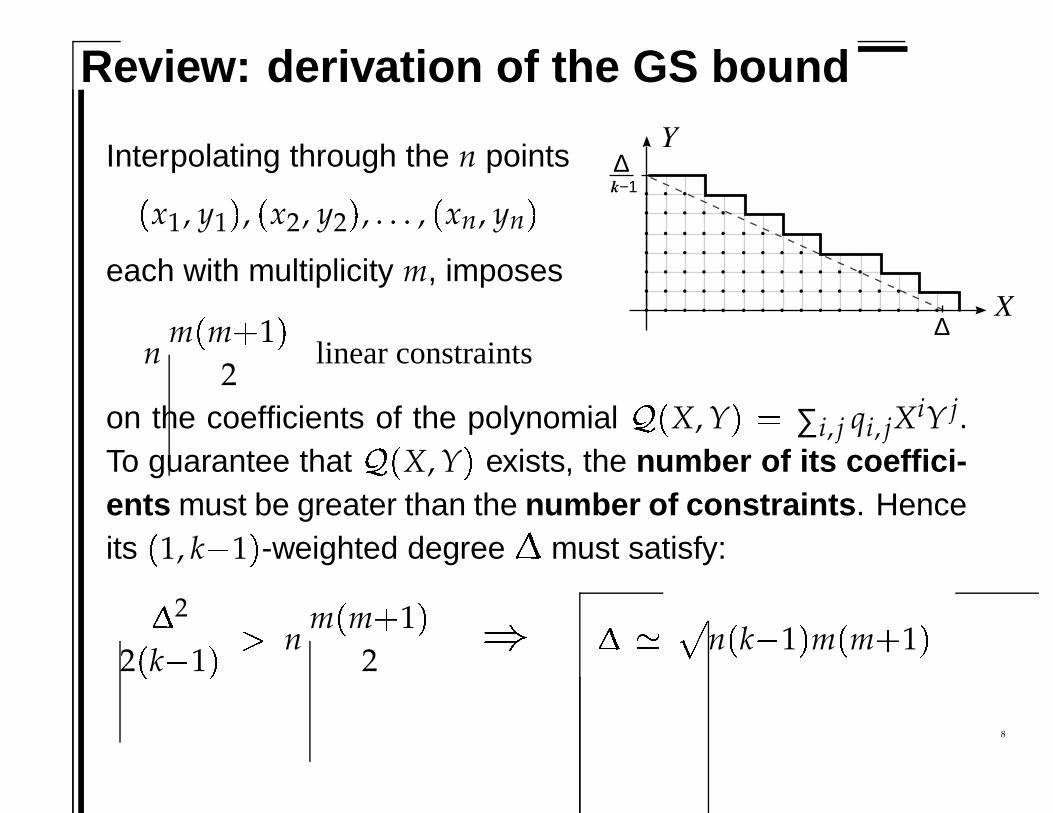
Review: derivation of the GS bound
Interpolating through the n points� x1, y1 � , � x2, y2 � , . . . , � xn, yn �
each with multiplicity m, imposes
nm � m� 1 �
2linear constraints
∆
∆k−1
X
Y
••••••••• •
••••••
••••••
•••••
••••
••
•••••••
••••••
•••••
••••
•••
•••
•••
••
on the coefficients of the polynomial , � X, Y � ∑i, j qi, jXiY j.To guarantee that , � X, Y � exists, the number of its coeffici-ents must be greater than the number of constraints. Henceits � 1, k� 1 � -weighted degree must satisfy:
- 2
2 � k� 1 �. nm � m� 1 �
2
- / n � k� 1 � m � m� 1 �
8

Review: derivation of the GS bound
Let P � X � def , 0 X, f � X � 1 and let t be the number of errors,that is the number of positions j such that y j2 f � x j � . Then
deg P � X �43 deg1,k� 1 ! � X, Y �3 n � k� 1 � m � m 5 1 �
# zeros of P � X � 3 m � #x j such that ! � x j, f � x j � �3 0 3 m � n� t �
It follows by the fundamental theorem of algebra that P � X �76 0is the all-zero polynomial, provided:
m � n� t �. n � k� 1 � m � m� 1 �
Equivalently:
tGS
8889
n� n R 1� 1m
:::;
m <=� n 1� R
9

Derivation of the three-dimensional bound
Interpolating through the n points
� x1, y1, z1 � , . . . , � xn, yn, zn �
each with multiplicity m, imposes
nm � m� 1 � � m� 2 �
6constraints
on the coefficients of the polynomial
1∆
k
1∆
k∆
Z
XY
, � X, Y, Z � ∑i, j,l qi, j,lXiY jZl. To guarantee that , � X, Y, Z � ex-
ists, the number of coefficients must be greater than the num-ber of constraints. Hence its weighted degree must satisfy:
> 3
6 � k� 1 � 2? nm � m 5 1 � � m 5 2 �
6
- / 3 n � k� 1 � 2m � m� 1 � � m� 2 �
10

Derivation of the three-dimensional bound
Let P � X � def , 0 X, f � X � , g � X � 1 and let t denote the # of errors,that is the # of positions j such that y j2 f � x j � or z j2 g � x j � .
deg P � X �3 deg1,k� 1,k� 1 ! � X, Y, Z �3 3 n � k� 1 � 2m � m 5 1 � � m 5 2 �
# zeros P � X � 3 m � #x j such that ! � x j, f � x j � , g � x j � �3 0 3 m � n� t �
It follows by the fundamental theorem of algebra that P � X �76 0is the all-zero polynomial, provided:
m � n� t �. 3 n � k� 1 � 2m � m� 1 � � m� 2 �
Equivalently:
t3D
8889
n� n 3 R2 1� 1m
1� 2m
:::;
m <=� n 1� R2 @ 3
11
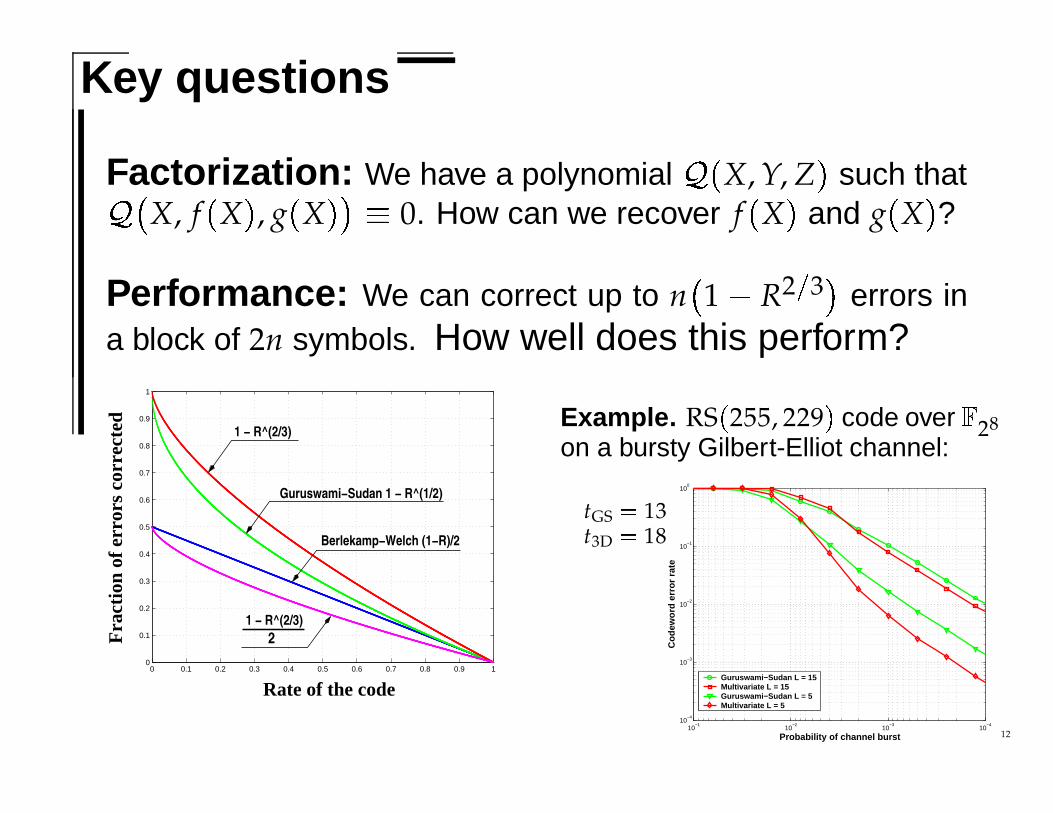
Key questions
Factorization: We have a polynomial , � X, Y, Z � such that
, 0 X, f � X � , g � X � 1 6 0. How can we recover f � X � and g � X � ?
Performance: We can correct up to n 0 1� R2 @ 3 1 errors ina block of 2n symbols. How well does this perform?
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Rate of the code
Fra
ctio
n of
err
ors
corr
ecte
d
1 − R^(2/3)
Guruswami−Sudan 1 − R^(1/2)
Berlekamp−Welch (1−R)/2
1 − R^(2/3)2
Example. RS � 255, 229 � code over � 28on a bursty Gilbert-Elliot channel:
10−4
10−3
10−2
10−1
10−4
10−3
10−2
10−1
100
Probability of channel burst
Co
dew
ord
err
or
rate
Guruswami−Sudan L = 15Multivariate L = 15Guruswami−Sudan L = 5Multivariate L = 5
tGSA 13t3DA 18
12
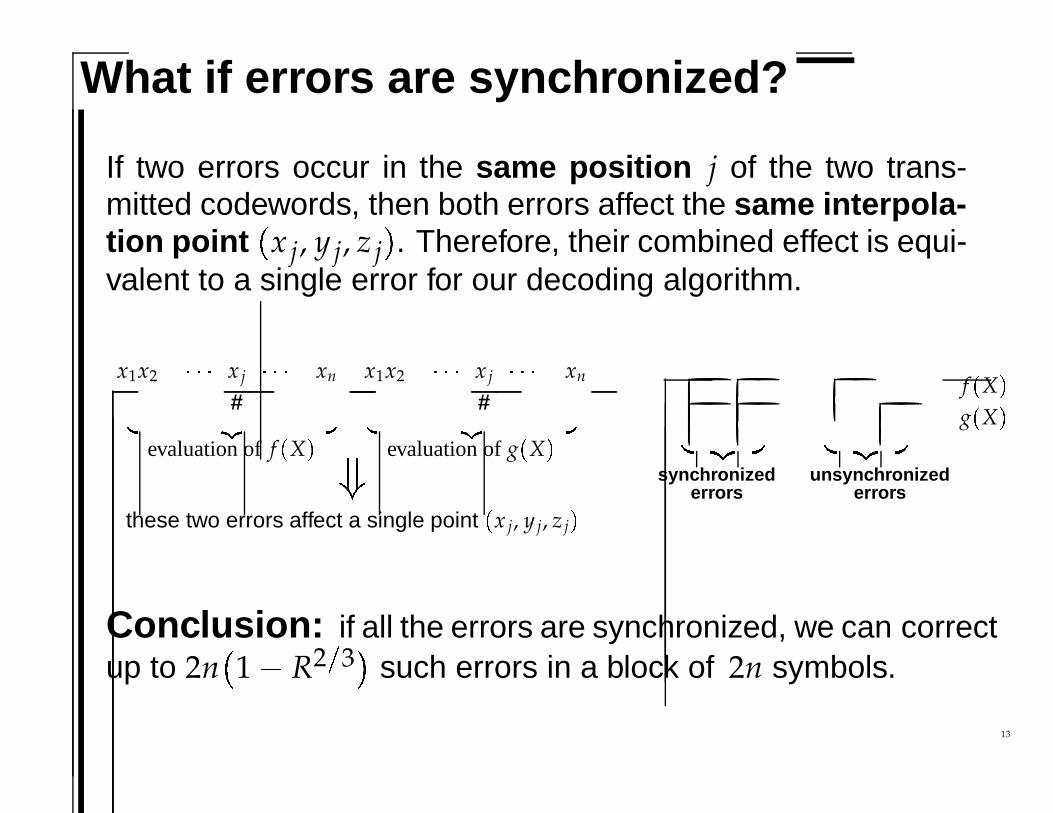
What if errors are synchronized?
If two errors occur in the same position j of the two trans-mitted codewords, then both errors affect the same interpola-tion point � x j, y j, z j � . Therefore, their combined effect is equi-valent to a single error for our decoding algorithm.
x1x2 B B B x j B B B xn x1x2 B B B x j B B B xn
# #C DE F C D E F
evaluation of f * X + evaluation of g * X +these two errors affect a single point * x j, y j, z j +
f * X +
g * X +& '( )
synchronizederrors
& '( )
unsynchronizederrors
Conclusion: if all the errors are synchronized, we can correctup to 2n 0 1� R2 @ 3 1 such errors in a block of 2n symbols.
13

Extension to multivariate interpolation
Decode together M� 1 codewords, the evaluations of f1 � X � , . . . , fM� 1 � X � ,and assign n interpolation points in M dimensions, each with multiplicity m.
# of linear constraintsA n G
M H m� 1M I A n * M H m� 1 + !
M! * m� 1 + !volume of an M-dimensional pyramidA J M
M! * k� 1 + MK 1
weighted-degree of L * X, Y1, . . . , YMK 1 + A n M RMK 1 m * m H 1 + B B B * m H M� 1 +
Thus by fundamental theorem of algebra Q � X, f1 � X � ,. . . , fM� 1 � X � � " 0,provided:
m � n� t �. n M RM� 1 m � m� 1 � � � � � m� M� 1 �
so that
tM3MMM
N
n� n M RM� 1 1 5 1m
% % % 1 5 M� 1m
OOOP
m <=� n 1� RMQ 1
M
14
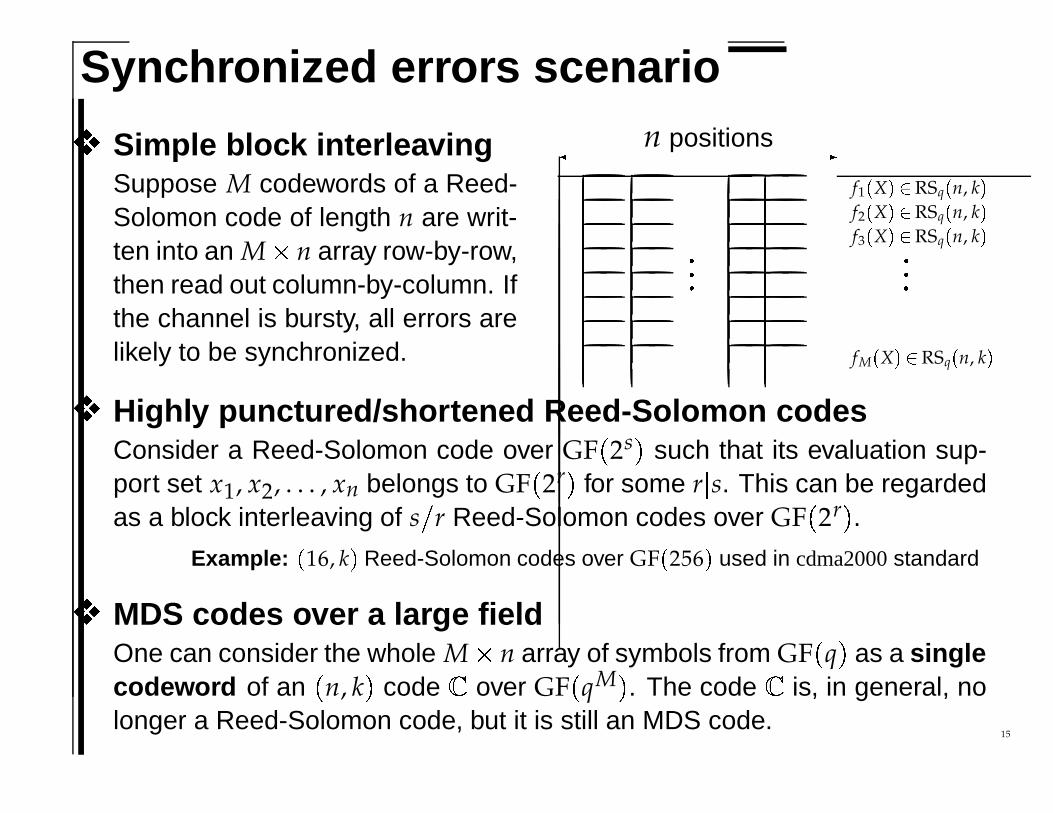
Synchronized errors scenario
Simple block interleavingSuppose M codewords of a Reed-Solomon code of length n are writ-ten into an MR n array row-by-row,then read out column-by-column. Ifthe channel is bursty, all errors arelikely to be synchronized.
SSS SSS
T U
f1 V X WYX RSq V n, k W
f2 V X WYX RSq V n, k W
f3 V X WYX RSq V n, k W
fM V X WYX RSq V n, k W
n positions
Highly punctured/shortened Reed-Solomon codesConsider a Reed-Solomon code over GF � 2s � such that its evaluation sup-port set x1, x2, . . . , xn belongs to GF � 2r � for some r Z s. This can be regardedas a block interleaving of s @ r Reed-Solomon codes over GF � 2r � .
Example: * 16, k + Reed-Solomon codes over GF * 256 + used in cdma2000 standard
MDS codes over a large fieldOne can consider the whole MR n array of symbols from GF � q � as a singlecodeword of an � n, k � code [ over GF � qM � . The code [ is, in general, nolonger a Reed-Solomon code, but it is still an MDS code.
15

Synchronized errors: prior work
Bleichenbacher, Kiayias, and Yungconsider the synchronized errorsscenario. They devise a probabi-listic decoding algorithm thatdecodes a fraction of errors up to
τBKY3 MM 5 1 � 1� R �
SSS SSS
T U
f1 V X WYX RSq V n, k W
f2 V X WYX RSq V n, k W
f3 V X WYX RSq V n, k W
fM V X WYX RSq V n, k W
n positions
D. Bleichenbacher, A. Kiayias, and M. Yung, Decoding of interleaved Reed-Solomoncodes over noisy data, Lecture Notes Computer Science, 2719, pp. 97–108, 2003.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
\]^ _` ab c _de f c
d e fhg _` ab c
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1 d e fhg _b ai c\]^ _b ai c _de f c
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1 d e fhg _i aj c\]^ _i aj c _d e f c
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1 d e fhg _j ak c\]^ _j ak c _de f c
Coppersmith-Sudan devise another probabilistic decoding algorithm thatimproves upon BKY by extending the error-correction radius to 1� R * M� 1 +l M
D. Coppersmith and M. Sudan, Reconstructing curves in three (and higher) dimensionalspace from noisy data, ACM Symp. Theory Computing (STOC), June 2003.
16

Probabilistic vs. deterministic decoding
Bleichenbacher-Kiayias-Yung and Copper-smith-Sudan both assume a q-ary symmet-ric channel model.
Is this a reasonableassumption in practice? q 1
p
q 1p
1 p
1
2
i
i
1
q 1
The Bleichenbaher-Kiayias-Yung probabilistic decoder failswith probability 1 q, regardless of the number of errors.
The Coppersmith-Sudan probabilistic decoder fails withprobability O � nM q � , regardless of the number of errors.
But... Multivariate interpolation decodingleads to deterministic decoders
17

Decoding algorithm: interpolation task
Given: A set of points m 3 n � x1, y1, z1 � , � x2, y2, z2 � , . . . , � xn, yn, zn � o
along with prescribed interpolation multiplicities M3 p m1, m2, . . . , mn q .
Compute: A polynomial ! � X, Y, Z � over � q of minimal � 1, k� 1, k� 1 � -weighted-degree, such that
µxi,yi,zi � ! �r mi for all i3 1, 2, . . . , n �ts �
where µx j,yi,zi � ! � is the multiplicity of ! � X, Y, Z � at the point � xi, yi, zi � .By definition µxi,yi,zi � ! �3 min � a 5 b 5 c � , where the minimum is takenover all a, b, c� u with coef v ! � X 5 xi, Y 5 yi, Z 5 zi � , XaYbZc wyx3 0.
Koetter’s interpolation algorithm: Iteratively computes the min-imal, with respect to the � 1, k� 1, k� 1 � -weighted-degree monomial order,Grobner basis for the ideal z �|{ , M � of all polynomials that satisfy �ts � .
R. Kotter, On Algebraic Decoding of Algebraic-Geometric and Cyclic Codes,Ph.D. Thesis, University of Linkoping, Sweden, 1996.
18
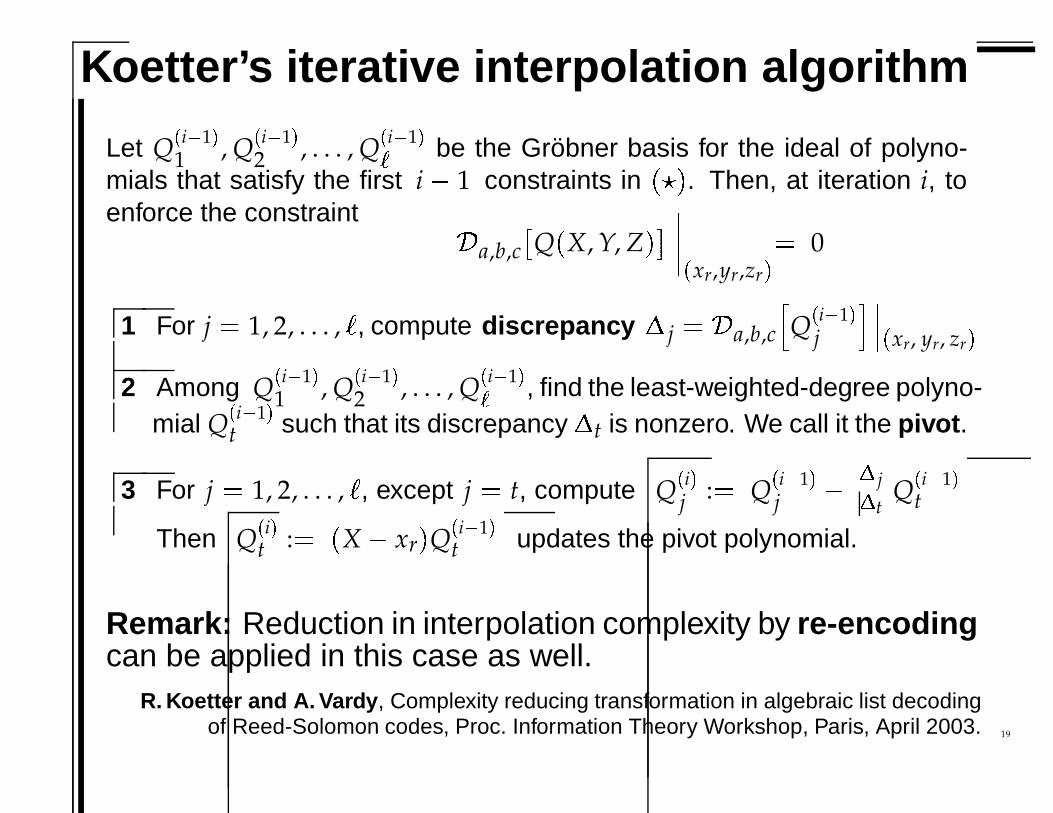
Koetter’s iterative interpolation algorithm
Let Q V iQ 1 W1 , Q V iQ 1 W
2 , . . . , Q V iQ 1 W} be the Grobner basis for the ideal of polyno-mials that satisfy the first i� 1 constraints in � s � . Then, at iteration i, toenforce the constraint ~ a,b,c � Q � X, Y, Z � ����� * xr,yr,zr +
3 0
1 For j3 1, 2, . . . , � , compute discrepancy > j3 ~ a,b,c � Q V iQ 1 W
j ���� * xr, yr, zr +
2 Among Q V iQ 1 W
1 , Q V iQ 1 W2 , . . . , Q V iQ 1 W} , find the least-weighted-degree polyno-
mial Q V iQ 1 W
t such that its discrepancy > t is nonzero. We call it the pivot.
3 For j3 1, 2, . . . , � , except j3 t, compute Q V i W
j :3 Q V iQ 1 W
j
� J jJ tQ V iQ 1 W
t
Then Q V i W
t :3 � X� xr � Q V iQ 1 Wt updates the pivot polynomial.
Remark: Reduction in interpolation complexity by re-encodingcan be applied in this case as well.
R. Koetter and A. Vardy, Complexity reducing transformation in algebraic list decodingof Reed-Solomon codes, Proc. Information Theory Workshop, Paris, April 2003. 19

Decoding algorithm: factorization task
Given: A single polynomial , � X, Y, Z �� � q � X, Y, Z � such that
, 0 X, f � X � , g � X � 1 6 0 for some polynomials f � X � and g � X � ofdegree � k, recover f � X � and g � X � .
Three dimensions versus two dimensions: In the bivariatecase, ! � X, f � X � � " 0 if and only if Y� f � X � is a factor of ! � X, Y � .In the multivariate case, if ! � X, f � X � , g � X � �" 0 then
! � X, Y, Z �3 A � X, Y, Z � � Y� f � X � � 5 B � X, Y, Z � � Z� g � X � �
Thus neither Y� f � X � nor Z� g � X � are necessarily factors of ! � X, Y, Z �
and straightforward factorization does not work.
Three dimensions versus two dimensions: In the bivariatecase, the # of different polynomials f � X � such that ! � X, f � X � � " 0 isbounded by the Y-degree of ! � X, Y � . In the multivariate case, thenumber of different pairs f � X � , g � X � such that ! � X, f � X � , g � X � � " 0is not bounded by the degree of ! � X, Y, Z � .
20

The impossibility of recovery?
Given: A polynomial ! � X, Y, Z � over � q such that ! � X, f � X � , g � X � � " 0for some polynomials f � X � , g � X � of degree � k, recover f � X � and g � X � .Theorem Under certain mild conditions on , � X, Y, Z � , thereis an exponential number of such polynomials f � X � , g � X � .
Proof. Think of the solutions f � X � , g � X � as elements of � qk . That is, letE � X ��� � q � X � be an irreducible polynomial with deg E � X �3 k� 1, and define
{ � Y, Z � def3 Q � X, Y, Z � mod E � X �3 ∑i, j
pi, jYiZ j with pi, j� � qk
Then Q � X, f � X � ,g � X � �#" 0 if{ � � f � , � g � �3 0, where � f � , � g �� � qk , and by theHasse-Weil theorem, we have
#{ � � qk � r 1 5 qk� 2 � qk
But the degree of ! � X, Y, Z � is bounded away from qk, so that the genus �
of{ � Y, Z � is also bounded and #{ � � qk �3 � � qk � .Conclusion: recovery of f � X � , g � X � is impossible! Or is it?
21

Recovery from more than one polynomial
Koetter’s iterative interpolation algorithm computes not one polynomial! � X, Y, Z � , but a minimal Grobner basis p G1, G2, . . . , Gl q with
deg1, k� 1, k� 1 G1� deg1, k� 1, k� 1 G2� % % %� deg1, k� 1, k� 1 Gl
for the ideal of all polynomials that satisfy the interpolation constraints(pass through the interpolation points with prescribed multiplicities).
Provided the number of channel errors is not too large, bothG1 � X, Y, Z � and G2 � X, Y, Z � satisfy
G1 0 X, f � X � , g � X � 1 6 G2 0 X, f � X � , g � X � 1 6 0 ��� �
Moreover, if G1 � X, Y, Z � and G2 � X, Y, Z � are relatively prime,then the number of solutions to the system of equations �� � ispolynomially bounded by the degrees of G1 and G2.
Use both G1 and G2 to recover f � X � , g � X � .22

Resultant-based recovery algorithm
Lemma Let H � X, Y � � �� � G1, G2; Z � denote the resultant ofG1 � X, Y, Z � and G2 � X, Y, Z � with respect to Z. Then
G1 0 X, f � X � ,g � X � 16 G2 0 X, f � X � ,g � X � 16 0 H 0 X, f � X � 16 0
Recovery algorithm:1 Compute H � X, Y �3 � �� � G1, G2; Z � , the resultant of G1 � X, Y, Z � and
G2 � X, Y, Z � with respect to Z. [ polynomial-time computation ]
2 Factor H � X, Y � – using e.g., Roth-Ruckenstein algorithm – to recoverf � X � such that H � X, f � X � �#" 0. [ # of factors is bounded by degY H ]
3 Substitute Y by f � X � in G1 � X, Y, Z � ; then factor the resulting bivariatepolynomial to recover g � X � . [ # of factors is bounded by degZ G1 ]
The polynomials f � X � , g � X � are recovered,provided H � X, Y � � �� � G1, G2; Z � 26 0.
23

How much do we have to pay?
Let > 1 and > 2 denote the weighted degrees of G1 � X, Y, Z � and G2 � X, Y, Z � ,respectively, with > 2r > 1. We know that Gi � X, f � X � , g � X � �" 0 providedm � n� t �? > i for i3 1, 2. What can we say about - 2?
Theorem
> 2� > 12
1 5 43
R2 nm
> 1
3� 13 � nmR
21 5 4
3R
� 13
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
�� ��� �h� �� ¡ ¢£¤ ¢¥ ¦§ ¨� © ¢¤ ª« � �� � � �
Rate of the code
Fra
ctio
n of
err
ors
corr
ecte
d
¬ £ ®¯ ¦§° � ±² ¦³ � � ��� � � � � Recovery from two polynomials Conclusion: The second Grobner poly-
nomial G2 satisfies G2 � X, f � X � , g � X � �" 0,provided
tn� 1� R
21 5 4
3R
� 13
This expression is very close to the bestpossible bound of 1� R2l 3, for all rates.
24

Proof of the bound on 2
X
Y
Definition. The deltaset > � z � of a polynomial idealis defined as the set of all monomials that are not theleading monomials of the polynomials in z .
Lemma Let z ´ denote the ideal consisting of all polynomials in � q � X, Y, Z �
that pass through n given points in a set{ , each with multiplicity m. Then��� - � z ´ ���� 3 n m � m 5 1 � � m 5 2 �
6
J. Ma, P. Trifonov, and A. Vardy, Divide-and-conquer interpolation for list decodingof Reed-Solomon codes, in Proceedings ISIT, Chicago, July 2004.
−
−
∆1 2
∆2 ∆1
∆ ∆k
∆
∆
∆
12
2
1
k
k
k
G
G
1
2
The polynomial G1 alone can carve at most
� > 2� > 1 � 3@ 6 � k� 1 � 2 monomials from the del-taset, so the size of the deltaset is at least
��� - � z ´ ���� r > 32
� � > 2� > 1 � 3
6 � k� 1 � 2
25

What happens if the resultant is zero?
The recovery (factorization) algorithm based on G1 � X, Y, Z � and G2 � X, Y, Z �
fails if H � X, Y �3 � �� � G1, G2; Z � is the all-zero polynomial.
Lemma The resultant � � � � G1, G2; Z � is the all-zero polynomial if andonly if G1 � X, Y, Z � and G2 � X, Y, Z � have a common factor in � q � X, Y, Z �
which has a positive degree in Z.
D. Cox, J. Little, and D. O’Shea, IDEALS, VARIETIES, AND ALGORITHMS, Springer 1996.
Suppose � �� � G1, G2; Z � is the all-zero polynomial. Let µ � X, Y, Z � denotethe gcd � G1, G2 � , and write G1, G2 as
G1 � X,Y,Z �3 µ � X,Y,Z � U � X,Y,Z � , G2 � X,Y,Z �3 µ � X,Y,Z � V � X,Y,Z �
where U � X, Y, Z � and V � X, Y, Z � are relatively prime. Since we know thatG1 � X, f � X � , g � X � �" G2 � X, f � X � , g � X � �" 0, either
µ � X, f � X � , g � X � �" 0 or U � X, f � X � ,g � X � �" V � X, f � X � ,g � X � �" 0
26

Adaptive recovery algorithm
Initialize by setting Q � X, Y, Z �3 G1 � X, Y, Z � and P � X, Y, Z �3 G2 � X, Y, Z � .Also set i :3 2, and proceed as follows.
1 Compute µ � X, Y, Z � :3 gcd � Q, P � , using the Euclidean algorithm.
2 If degZ µ � X, Y, Z �3 0 or degY µ � X, Y, Z �3 0, compute � � � � Q, P; Z � or
� �� � Q,P; Y � and factor it with the Roth-Ruckenstein algorithm. Stop.
3 Otherwise, let U � X, Y, Z �3 Q @ µ and V � X, Y, Z �3 P @ µ . Then U and Vare relatively prime. Recover f � X � by factoring � � � � U, V; Z �x " 0 andg � X � by factoring � �� � U, V; Y �x " 0.
4 Set Q :3 µ � X, Y, Z � , P :3 Gi H 1 � X, Y, Z � , and i :3 i 5 1. Go back to 1 .
1−R^(2/3)
GSτ
Theorem This algorithm always terminates inpolynomial time. It corrects a fraction τ3D of syn-chronized errors, where
1� R � τ3D � 1� R2 @ 327

Conclusions and open problems
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
¶· ¸h¹ º»¼½ ¾¿ÀÁ ÀÃÄÅ Æ· Ç ÀÂÈÉ º ¶· ¸ ¾¼ »
Rate of the code
Fra
ctio
n of
err
ors
corr
ecte
d
ÊË Á ËÌÍ ÄÅÎ · ÏËÐ ÄÑ ¶· ¸h¹ º ¶¼ » ¾
Recovery from two polynomialsIn practice, trivariate interpolation decodingcorrects up to 1� R2l 3 fraction of synchro-nized errors. It is guaranteed to correct atleast 1� $ R errors in polynomial time. Thealgorithm has the potential to lead to verysubstantial coding gains in practice.
Many open problems remain:Efficient implementation (not just polynomial time) of multivariate poly-nomial interpolation and recovery (factorization).
What is the probability that � � � � G1, G2; Z �" 0 and � �� � G1, G2; Y �" 0?
Precise characterization of the decoding regions of the algorithm.
Extension to soft-decision decoding (easy, using the approach of KV?).
Relaxation (or elimination?) of the synchronized errors asumption.28