multidisciplinary engineering senior design project 06010: unmanned surveillance vehicle preliminary...
Post on 19-Dec-2015
214 views
TRANSCRIPT

Multidisciplinary Engineering Senior Design
Project 06010: Unmanned Surveillance VehiclePreliminary Design Review11.7.05
Team Members: Randy Cicale, Laurence DeWitt, Stephen Ray, Ian Shelley, Christopher Stilson, Stephen VisalliTeam Mentor: Dr. Mercin LukowiakAcknowledgements: Dr. Alan NyeKate Gleason College of Engineering
Rochester Institute of Technology

Overview
Project Overview Process System Diagram Analysis/Synthesis of Design Challenges/Risks Future Planning

Project Overview
Original Proposal Sponsor Unmanned ground vehicle GPS guided Photographic surveillance Wireless data transfer 3 Preliminary concepts

Process
Needs assessment Concept development Feasibility assessment Project schedule/Gantt Chart

Needs Assessment
Communication Vehicle <–> Remote Computer
Operation GPS <–> Vehicle
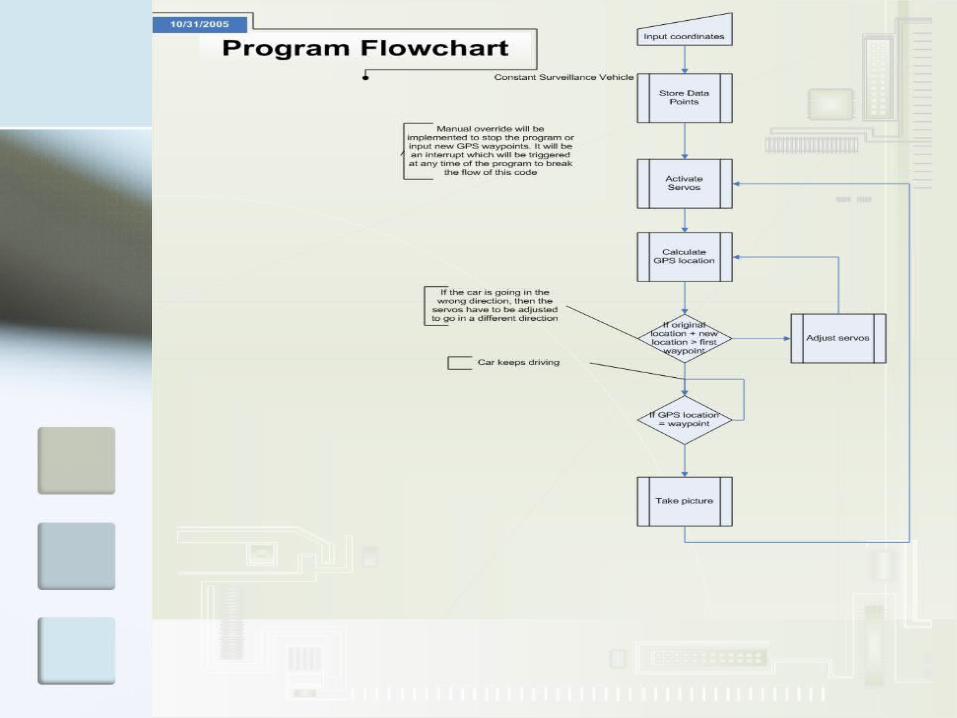
Graphical User Interface Constant Photographic Feedback Navigate through GPS waypoints

Key Requirements & Critical Parameters Navigate through waypoints Reliable data transfer Provide photographic feedback Graphic User Interface Package for < $2000 One-hour battery life Use on dry asphalt



Overall System Diagram/Block Diagram

Analysis & Synthesis of Design Detailed Design Feasibility of Components Bill of Materials

Detailed Design


Base-plate
Material Cost Material Availability Strength Manufacturability Conductivity Finish Aesthetics

Finite Element Analysis-Stress

FEA - Deflection

FEA – Shear Stress

Drive-Train
Simplicity Low mechanical energy loss Low Cost Easy to Assemble Good Performance

User Interface
Data processing GPS and Visual Surveillance
User Friendly Ability to adapt to users requests

Transceiver
Transmit/Receive Wireless Data Selection Parameters:
Outdoor transmission distance Baud Rate Power consumption Ease of Use
I/O protocol Impedance matching FCC Govt. regulations
Cost

Transceiver Comparison
Wi232 Zigbee WiFi
Freq 902-928 MHz 902 MHz or 2.4 GHz
2.4 GHz
Outdoor Range 4000 ft 500 ft 300-500 ft
Indoor Range 400 ft 30-60 ft 50-75 ft
Data Rate (Baud)
.3-152.34 kbps
40 kbps 1 Mbps
Cost <$10 ~$15 >$20

Transceiver
Radiotronix Wi.232 Developmental Kit Govt. Regs. Impedance match Power performance
3 AAA’s I/O ports
RS232 & USB

GPS Background
Cost Effective/Simplistic compared to INS Module v. Handheld Easy to process data
Selection parameters Cost Feasibility Power consumption Accuracy Acquisition time

GPS Polstar Technologies PMB-248
Cheap - $26 Low power – 80mA at 5V Quick access time – 2-40sec 12 parallel satellite-tracking channels
for fast acquisition and reacquisition

FPGA Background
Easy to Modify Lots of I/O ports Chip v. Evaluation Board
Selection parameters Cost Power consumption Amount of available logic Speed

FPGA Xilinx Virtex-4 ML403 Evaluation
Board Cost - $495
Donated to the team from Kodak Low power 450 MHz PowerPC Core RS-232 Serial Port, 3 USB Ports (2
Peripheral/1 Host), 64 General Purpose I/O

Servo Motors
Background Importance 4 Motors “Tank Drive”
Selection Parameters Required Voltage RPM Stall Torque Cost

Servo Motors cont’d
12V .38 amp Stall Torque: 225.64 oz-in 263 RPM $23.70/ea

Wheels
Selection Parameters Size (diameter and width) Compatibility w/ Motors Tread pattern Cost

Wheels cont’d 5”D x 2.25”W Neoprene “Off-road Tread” design $25/ pair

Camera
Background Importance Color Not restrict performance
Selection Parameters Size Range Battery life Cost

Camera cont’d
9V@150mA Range of 1000’ (LoS) 0.8”x0.8”x0.75” Includes base station 60 deg. Viewing angle $99.00

BOM & CostsBILL OF MATERIALS P06010 Unmanned Surveillance Vehicle
PARTNUMBER(Assy/PN)
PART NAMEQTY
MFR MODEL # SUPPLIERCOST
$OUR
$Sub $
10 BASE PLATE 1 (IN-HOUSE) 06010-001-A Metal Source 48 25 25
A20 20 SERVO MOTOR 4 Lynxmotion PGHM-13 Lynxmotion 23.7 23.7 94.8
A20 21SERVO CONTROL
BOARD 2 Lynxmotion HB-04 Lynxmotion 88.95 88.95 177.9
A20 22SERVO FASTENER
(pair) 2 Lynxmotion MMT-02 Lynxmotion 7.95 7.95 15.9
A20 23 9V BATTERY 2 N/A N/A N/A 1 1 2
30FPGA
1 XILINX
HW-V4-ML403-USA Eastman Kodak 495 0 0
A40 40 TRANSCEIVER 1 RADIOTRONIX RK-Wi232DTS RADIOTRONIX 249 0 0
A40 41 AAA BATTERY 6 N/A N/A N/A 0.5 0.5 3
50CAMERA
1 Unknown CM-1202Spy Camera
Specialist 99 99 99
60GPS BOARD
1 POLSTAR TECH PBM-248globalsources.co
m 26 26 26
70 WHEEL (pair) 2 Lynxmotion TRC-02 Lynxmotion 25 25 50
80 COMPUTER 1 DELL INSPIRON TEAM 1000 0 0
90LM317 V
REGULATOR 1 N/A LM317 mouser.com 1 1 1
Grand Total: 494.6

Anticipated Design Challenges/Risk Prototype safety
Roll-cage Extended Wheel Base Use of parking lot
Over-budget Power consumption

SD II Project Plan
11.14.05 - Begin Ordering Parts Work throughout winter quarter 4.2.06 - Prototype Complete 4.3.06 to 4.30.06 - Test and
Debug 5.15.06 - Prepared for
Comprehensive Design Review

Summary/Questions
Process Needs Feasibility Preliminary design concept Risks/challenges Project planning

Backup Slides and References Pugh’s Method for Feasibility
GPS Servo Motors Wheels Camera FPGA Transceiver Base Plate Drive-Train

GPS FeasibilityEvaluate each additional concept
against the baseline, score each attribute as: 1 = much
worse than baseline concept 2 = worse than baseline 3 = same
as baseline 4 = better than baseline 5= much better than
baselinePMB-248PMB-248 PMB-238PMB-238 EM-401EM-401 PGM-102PGM-102
Sufficient Student Skills?Sufficient Student Skills? 3.0 3 3 3
Sufficient Lab Equipment?Sufficient Lab Equipment? 3.0 3 3 3
Ease of UseEase of Use 3.0 2 2 2
Cost of Materials?Cost of Materials? 3.0 3 3 3
Cost of Device?Cost of Device? 3.0 3 2 2
SizeSize 3.0 3 2 3
Technology Feasibility Technology Feasibility 3.0 2 1 2
AccuracyAccuracy 3.0 3 1 1
Acquisition TimeAcquisition Time 3.0 3 1 2
Power SupplyPower Supply 3.0 3 2 3
Mean ScoreMean Score 3.0 2.8 2.0 2.4
Normalized ScoreNormalized Score 100.0% 93.3% 66.7% 80.0%

Servo Motor Feasibility

Wheel Feasibility

Camera Pugh’s Method

FPGAEvaluate each additional
concept against the baseline, score each attribute as: 1 = much worse than baseline
concept 2 = worse than baseline 3 = same as baseline
4 = better than baseline 5= much better than baseline
Virtex 4ML401
Evual Kit
HC12 Micro-
controller
Virtex 4 ML402
Evual Kit
Virtex 4
ML403 Evual
Kit
68000 Mirco-
Controller
Relative Weight
Sufficient Student Skills? 3.0 2 3 3 3 11%
Processing Power 3.0 2 2.5 5 2 3%
Memory 3.0 1 3 5 1 5%
Aviable Logic 3.0 2 2.5 2.7 1 14%
I/O Ports 3.0 1 3 3 1 16%
Interfacing with extra memory 3.0 1 3 3 1 16%
Simulation of Models 3.0 1 3 3 1 14%
Sufficient Lab Equipment 3.0 2.5 3 3.0 2.5 3%
Cost 3.0 2 3 3 2 3%
Cost of components 3.0 1 3 3 1 16%
Weighted Score 3.0 1.3 2.9 3.1 1.3
Normalized Score 100.0% 43.2% 97.3% 105.0%
42.3%

Transceiver Feasibility
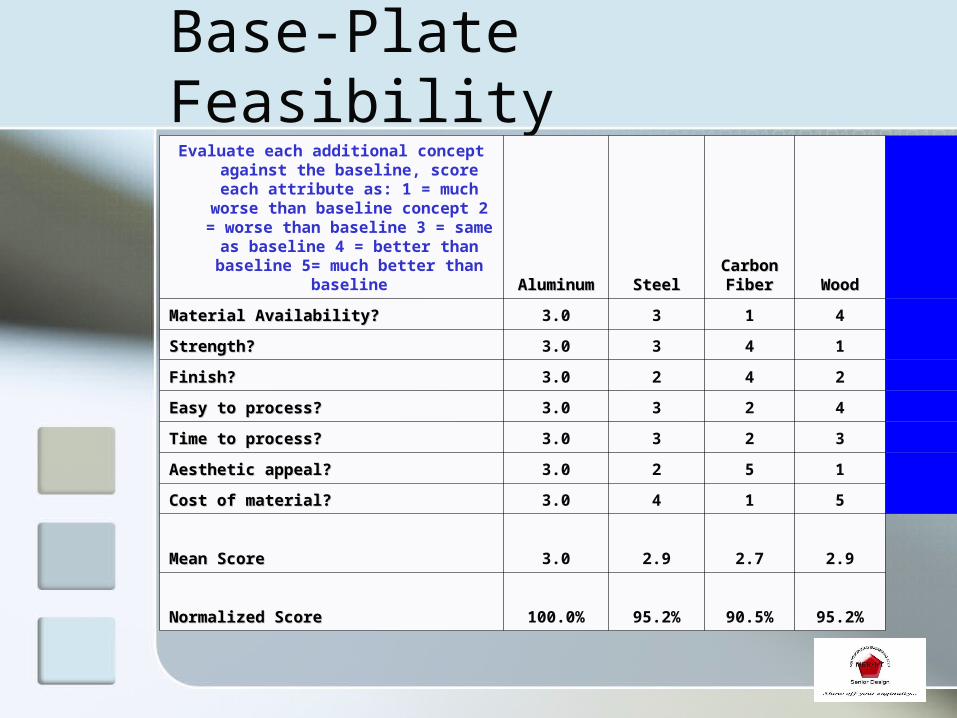
Base-Plate FeasibilityEvaluate each additional concept
against the baseline, score each attribute as: 1 = much
worse than baseline concept 2 = worse than baseline 3 =
same as baseline 4 = better than baseline 5= much better
than baselineAluminuAluminu
mm SteelSteelCarbonCarbonFiberFiber WoodWood
Material Availability?Material Availability? 3.0 3 1 4
Strength?Strength? 3.0 3 4 1
Finish?Finish? 3.0 2 4 2
Easy to process?Easy to process? 3.0 3 2 4
Time to process?Time to process? 3.0 3 2 3
Aesthetic appeal?Aesthetic appeal? 3.0 2 5 1
Cost of material?Cost of material? 3.0 4 1 5
Mean ScoreMean Score 3.0 2.9 2.7 2.9
Normalized ScoreNormalized Score 100.0% 95.2% 90.5% 95.2%

Drive-Train FeasibilityEvaluate each additional concept
against the baseline, score each attribute as: 1 = much
worse than baseline concept 2 = worse than baseline 3 =
same as baseline 4 = better than baseline 5= much better
than baseline 4 servos4 servos
Servos In2
Corners
ChainChainDriveDrive
nn
BeltBelt DrDrivivenen
22CasteCaste
rsrs
Skill to manufacture?Skill to manufacture? 3.0 3 1 1 3
Access to necessary tooling?Access to necessary tooling? 3.0 3 2 2 3
Cost of Materials?Cost of Materials? 3.0 2 2 2 3
Cost of Purchased Components?Cost of Purchased Components? 3.0 4 3 3 3
Time to assemble?Time to assemble? 3.0 4 2 2 3
Time to order parts?Time to order parts? 3.0 3 2 2 3
Time to manufacture parts?Time to manufacture parts? 3.0 2 2 2 3
Multiple Technologies Needed?Multiple Technologies Needed? 3.0 3 3 3 3
Back-up with engineering Back-up with engineering calculations?calculations? 3.0 2 1 2 3
Performance?Performance? 3.0 2 2 2 1
Ability to be used on various Ability to be used on various surfaces?surfaces? 3.0 2 3 3 1
Mean ScoreMean Score 3.0 2.7 2.1 2.2 2.6
Normalized ScoreNormalized Score 100.0%90.9
% 69%72.7
%87.9
%