mooring implementation in sph models
TRANSCRIPT

Mooring implementation in SPH models
[email protected], Iberian SPH workshop, Dec 2015
A. Barreiro, J.M. Dominguez, A.J.C. Crespo, O. Garcia-Feal and M. Gomez-Gesteira

Table of contents1. Introduction
2. Floatings & moorings
3. Conclusions
Iberian SPH workshop, Dec 2015
1.1 What is a mooring?1.2 Why is important to solve moorings?
Iberian SPH workshop, Dec 2015
Table of contents1. Introduction
2. Floatings & moorings
3. Conclusions

Iberian SPH workshop, Dec 2015
Floatings & Moorings
Iberian SPH workshop, Dec 2015
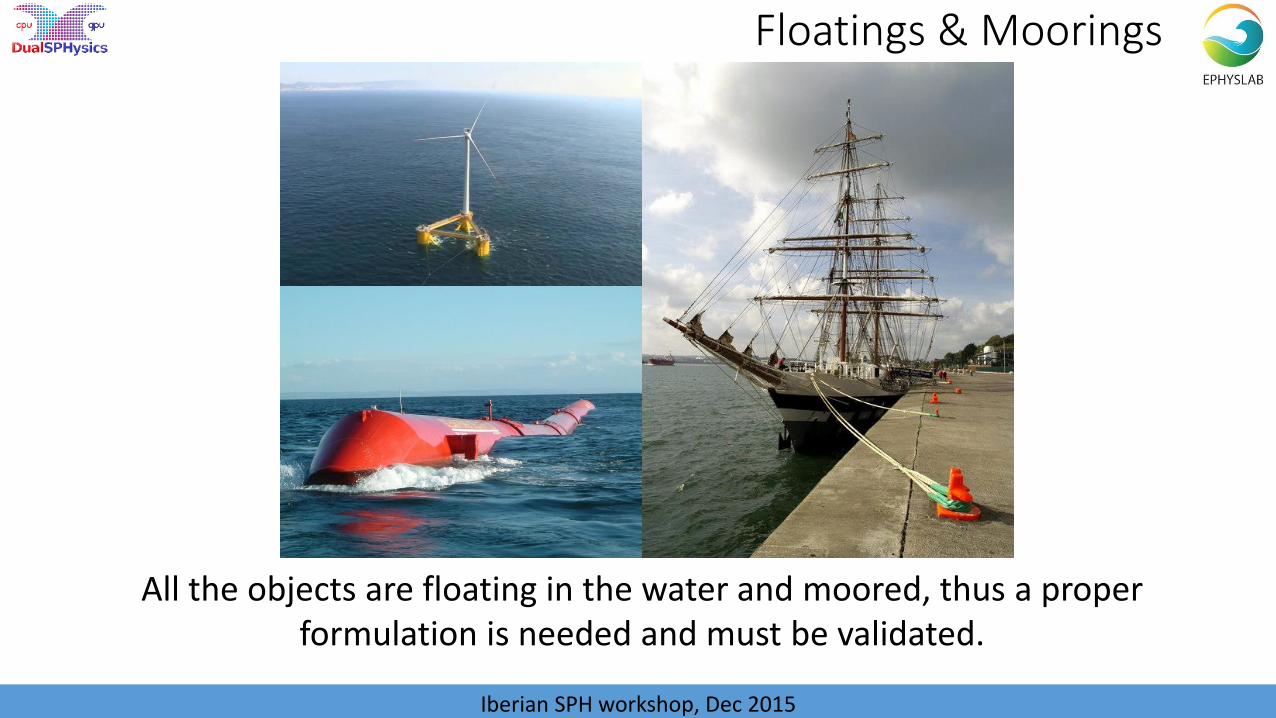
All the objects are floating in the water and moored, thus a proper formulation is needed and must be validated.
Floatings & Moorings

Iberian SPH workshop, Dec 2015
2.1 Fluid driven objects2.2 Moored lines
2.2.1 Static approach2.2.2 Mooring classification2.2.3 Model validation
2.3 Application cases
Table of contents1. Introduction
2. Floatings & moorings
3. Run-off on real terrains
4. Conclusions & future work

Iberian SPH workshop, Dec 2015
2.1 Fluid driven objects
𝒇𝑘 =
𝑎∈𝑊𝑃𝑠
𝒇𝑘𝑎Each particle k (FB) experiences a force per unit mass given by
𝑚𝑘𝒇𝑘𝑎 = −𝑚𝑎𝒇𝑎𝑘
Where 𝒇𝑘𝑎 is the force per unit mass by the fluid a on particle k,
𝑀𝑑𝑽
𝑑𝑡=
𝑘∈𝐵𝑃𝑠
𝑚𝑘 𝒇𝑘
𝐼𝑑𝛀
𝑑𝑡=
𝑘∈𝐵𝑃𝑠
𝑚𝑘 𝒓𝑘 − 𝑹0 × 𝒇𝑘
Newton’s equations for rigid body dynamics:
Floatings & Moorings
𝒖𝑘 = 𝑽 + 𝜴 × 𝒓𝑘 − 𝑹0
The movement of FB is derived by considering its interaction with fluid particles and using these forces to drive its motion

Iberian SPH workshop, Dec 2015
2.1 Fluid Driven objects
Validation for floating objects
Fekken (2004) & Canelas et al. (2015)
Floatings & Moorings
𝜌𝑜𝑏𝑗𝑒𝑐𝑡 = 1,200 kg · 𝑚−3
Comparison of numerical data and DualSPHysics results for displacement and velocity of the sinking cylinder.

Iberian SPH workshop, Dec 2015
2.2 Moored lines
𝑦 = 𝜉 cosh𝑥
𝜉
-1
1
3
5
7
9
11
13
15
-4 -3 -2 -1 0 1 2 3 4
Floatings & Moorings

Iberian SPH workshop, Dec 2015
2.2 Moored lines
𝑦 = 𝜉 cosh𝑥
𝜉
-1
1
3
5
7
9
11
13
15
-4 -3 -2 -1 0 1 2 3 4
Catenary function
Floatings & Moorings
𝜉 = 1
𝜉 = 2
𝜉 = 3

Iberian SPH workshop, Dec 2015
2.2 Moored lines
T is the line tension.
A is the cross-section area of the line.
E represents the elasticity modulus.
F and D correspond to the mean hydrodynamic
forces both normal and tangential direction
respectively.
𝝎 is the submerged weight per unit length.
Floatings & MooringsDiagram of the different forces acting on an element of a mooring line

Iberian SPH workshop, Dec 2015
𝑑𝑇 − 𝜌𝑔𝐴 𝑑𝑧 = 𝜔 𝑠𝑖𝑛 𝜙 − 𝐹 1 + 𝑇 𝐴𝐸 𝑑𝑠
𝑇 𝑑𝜙 − 𝜌𝑔𝐴 𝑑𝜙 = 𝜔 𝑐𝑜𝑠 𝜙 + 𝐷 1 + 𝑇 𝐴𝐸 𝑑𝑠
𝑇 = 𝑇𝐻 + 𝜔ℎ + 𝜔 + 𝜌𝑔𝐴 𝑧
2.2.1 Static approach
Faltinsen (1993)
Floatings & Moorings
The tension exerted by a mooring on a floating body can be expressed as:

Iberian SPH workshop, Dec 2015
2.2.1 Static approach Floatings & MooringsParameters that define a mooring line.

Iberian SPH workshop, Dec 2015
𝑋 = 𝑙 − ℎ 1 + 2𝑎
ℎ
12+ 𝑎 cosh−1 1 +
ℎ
𝑎𝑎 = 𝑇𝐻 𝜔
2.2.1 Static approach Floatings & MooringsParameters that define a mooring line.

Iberian SPH workshop, Dec 2015
𝑋 = 𝑙 − ℎ 1 + 2𝑎
ℎ
12+ 𝑎 cosh−1 1 +
ℎ
𝑎𝑎 = 𝑇𝐻 𝜔
0
50
100
150
80 85 90 95 100
TH
(kN
)
X (m)
Line 1
Line 2
- Line 1, 𝜔=850 N·m-1, h=20 m and l=100 m.
- Line 2, 𝜔=1000 N·m-1, h=20 m and l=100 m.
2.2.1 Static approach Floatings & Moorings

Iberian SPH workshop, Dec 2015
x
y
ψi
THi
The equations shown before can begeneralized for a multiple lineproblem with the properimplementation.
𝐹𝑥 = 𝑇𝐻𝑖 𝑐𝑜𝑠 𝛹𝑖
2.2.1 Static approach
𝐹𝑦 = 𝑇𝐻𝑖 𝑠𝑖𝑛𝛹𝑖
Floatings & Moorings
Spread mooring approach:

Iberian SPH workshop, Dec 2015
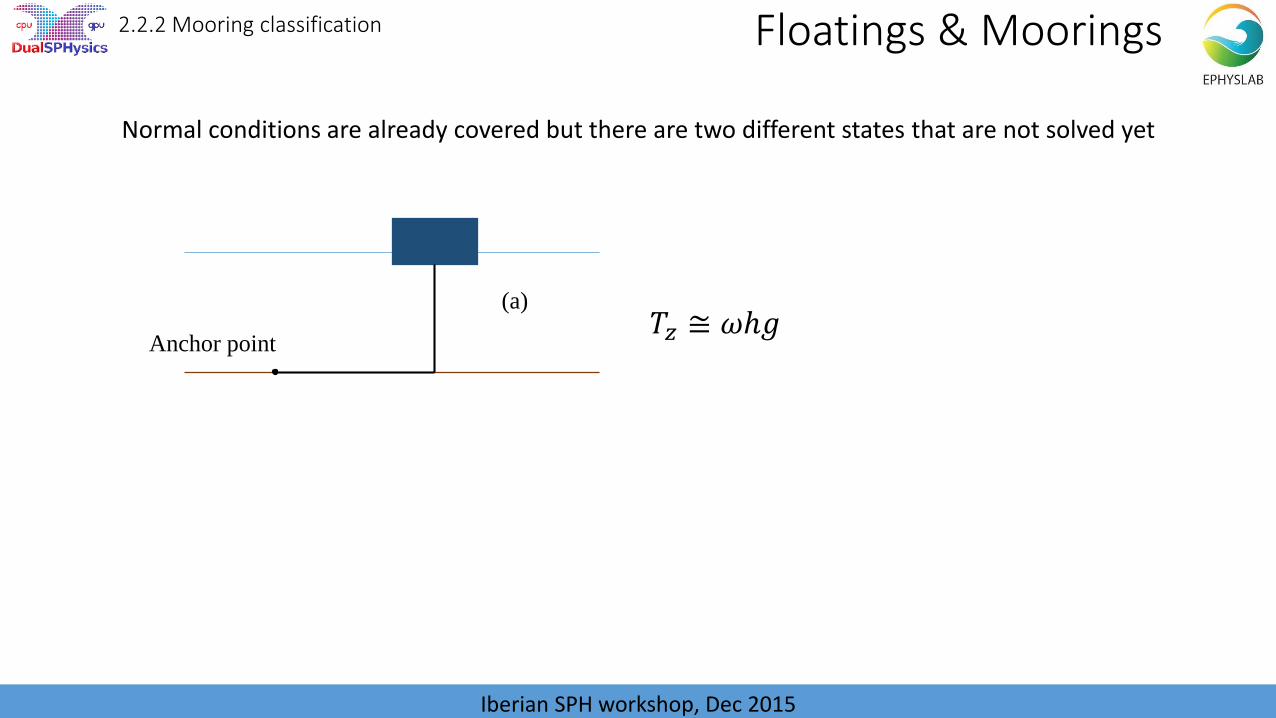
2.2.2 Mooring classification
Normal conditions are already covered but there are two different states that are not solved yet
Anchor point
(a)
(c)
(b)
(d)
Floatings & Moorings
Anchor point
(a)
Iberian SPH workshop, Dec 2015
2.2.2 Mooring classification
Normal conditions are already covered but there are two different states that are not solved yet
𝑇𝑧 ≅ 𝜔ℎ𝑔
Floatings & Moorings

Iberian SPH workshop, Dec 2015
2.2.2 Mooring classification
Normal conditions are already covered but there are two different states that are not solved yet
Floatings & Moorings
Anchor pointAnchor point
(a)
(c)
(b)
(d)
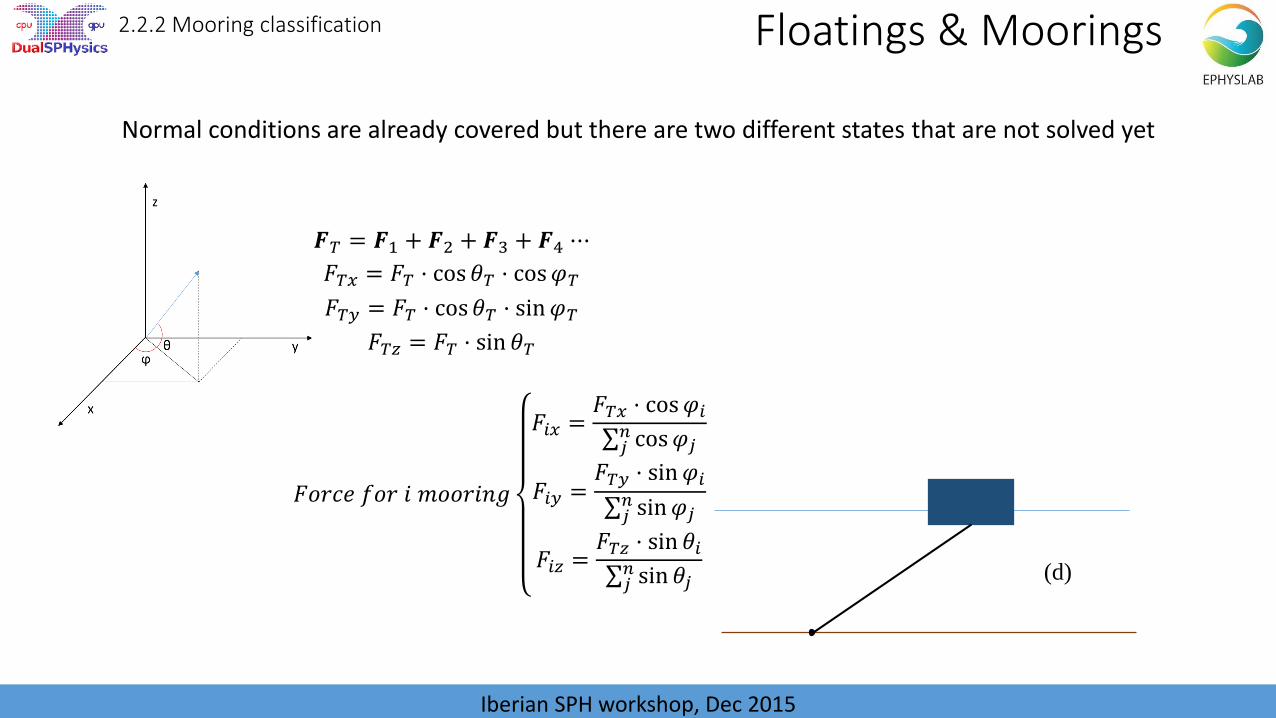
𝑭𝑇 = 𝑭1 + 𝑭2 + 𝑭3 + 𝑭4 ···
𝐹𝑇𝑥 = 𝐹𝑇 · cos 𝜃𝑇 · cos𝜑𝑇𝐹𝑇𝑦 = 𝐹𝑇 · cos 𝜃𝑇 · sin 𝜑𝑇𝐹𝑇𝑧 = 𝐹𝑇 · sin 𝜃𝑇
𝐹𝑜𝑟𝑐𝑒 𝑓𝑜𝑟 𝑖 𝑚𝑜𝑜𝑟𝑖𝑛𝑔
𝐹𝑖𝑥 =𝐹𝑇𝑥 · cos𝜑𝑖 𝑗𝑛 cos𝜑𝑗
𝐹𝑖𝑦 =𝐹𝑇𝑦 · sin 𝜑𝑖 𝑗𝑛 sin𝜑𝑗
𝐹𝑖𝑧 =𝐹𝑇𝑧 · sin 𝜃𝑖 𝑗𝑛 sin 𝜃𝑗 (d)
Iberian SPH workshop, Dec 2015
2.2.2 Mooring classification
Normal conditions are already covered but there are two different states that are not solved yet
Floatings & Moorings

Iberian SPH workshop, Dec 2015
2.2.3 Model validation
Johanning (2007), Laboratory dimensions.
Floatings & Moorings
One line validation I
(b) (c)

Iberian SPH workshop, Dec 2015
2.2.3 Model validation
Parameter Value
h 2.651 m
ω 1.036 N·m-1
l 6.98 m
Minimum extension 5.735 m
Maximum extension 6.367 m
0
5
10
15
5.5 6
Ten
sion
(kN
)
Position (m)
Experiments
Axial Loading
DualSPHysics
One line validation I
Floatings & Moorings
Johanning (2007), Laboratory dimensions.

Iberian SPH workshop, Dec 2015
2.2.3 Model validation Floatings & Moorings
One line validation II Johanning (2006), Real dimensions.
(b) (c)

Iberian SPH workshop, Dec 2015
2.2.3 Model validation
Parameter Value
h 50 m
ω 918.75 N·m-1
l 150 m
Minimum extension 102 m
Maximum extension 140 m
0
25000
50000
75000
100000
125000
150000
175000
100 105 110 115 120 125 130 135 140 145 150
Ten
sio
n (
N)
Distance (m)
Johaning
DualSPHysics
Floatings & Moorings
One line validation II Johanning (2006), Real dimensions.

Iberian SPH workshop, Dec 2015
2.2.3 Model validation Floatings & Moorings
Multiple line validation
Johanning (2006),Real dimensions.

Iberian SPH workshop, Dec 2015
2.2.3 Model validation
Parameter Value
h 50 m
TH0 50 kN
l 75 m
Minimum extension
from resting point
-15 m
Maximum extension
from resting point
15 m
Multiple line validation
0
50000
100000
150000
200000
250000
300000
350000
-20 -10 0 10 20
Ten
sion
(N
)
Position (m)
LineA Johanning
LineA DualSPHysics
LineB Johanning
LineB DualSPHysics
Merge Johanning
Merge DualSPHysics
Floatings & Moorings

Iberian SPH workshop, Dec 2015
Floatings & Moorings2.3 Application cases
VIDEO LINK

Iberian SPH workshop, Dec 2015
Floatings & Moorings2.3 Application cases
VIDEO LINK

Iberian SPH workshop, Dec 2015
Table of contents1. Introduction
2. Floatings & moorings
3. Conclusions

Iberian SPH workshop, Dec 2015
Conclusions
-Moorings & Floating bodies
The functionalities necessary to simulate mooringswere implemented in DualSPHysics. The newimplementation is able to solve properly both chainforces and the effect moorings in the floating bodies.
The buoyancy of the floating bodies was validatedagainst numerical data from VOF showing a reallygood agreement.
The implementation of moorings was validatedagainst experimental data and compared with othernumerical models. This validation provided reallygood agreement with both numerical andexperimental data at various scales.
Two application examples were presented, the firstone is a boat under the action of side waves and onlyone moored line. The second application consisted ofa wind-turbine base with three moorings under theeffect of extreme waves.

Mooring implementation in SPH models
[email protected], Iberian SPH workshop, Dec 2015
A. Barreiro, J.M. Dominguez, A.J.C. Crespo, O. Garcia-Feal and M. Gomez-Gesteira