modelling and simulation of marine craft dynamics...desirable to derive equations of motion about co...
TRANSCRIPT
Modelling and Simulation of Marine Craft
DYNAMICSEdin OmerdicSenior Research FellowMobile & Marine Robotics Research CentreUniversity of Limerick
Mobile & Marine Robotics Research Centre
University of Limerick
Outline
DynamicsRigid-Body Equations of Motion
Equations of Motion about CG
Equations of Motion about CO
6 DoF Equations of Motion (ROV)Restoring Forces and Moments
Ocean Current Forces and Moments
Wave Forces and Moments
Propulsion SystemPropeller Thrust and Torque Modelling
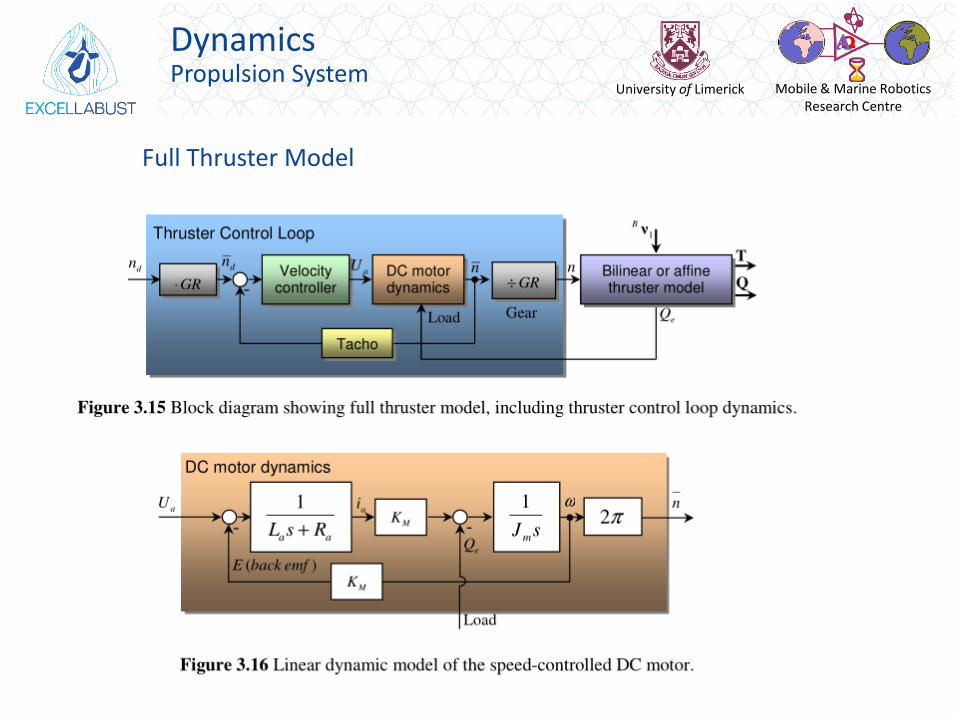
Full thruster model
Simulation DiagramsNonlinear 6DoF ROV model (Euler Angles)
Nonlinear 6DoF ROV model (Quaternions)
Mobile & Marine Robotics Research Centre
University of Limerick
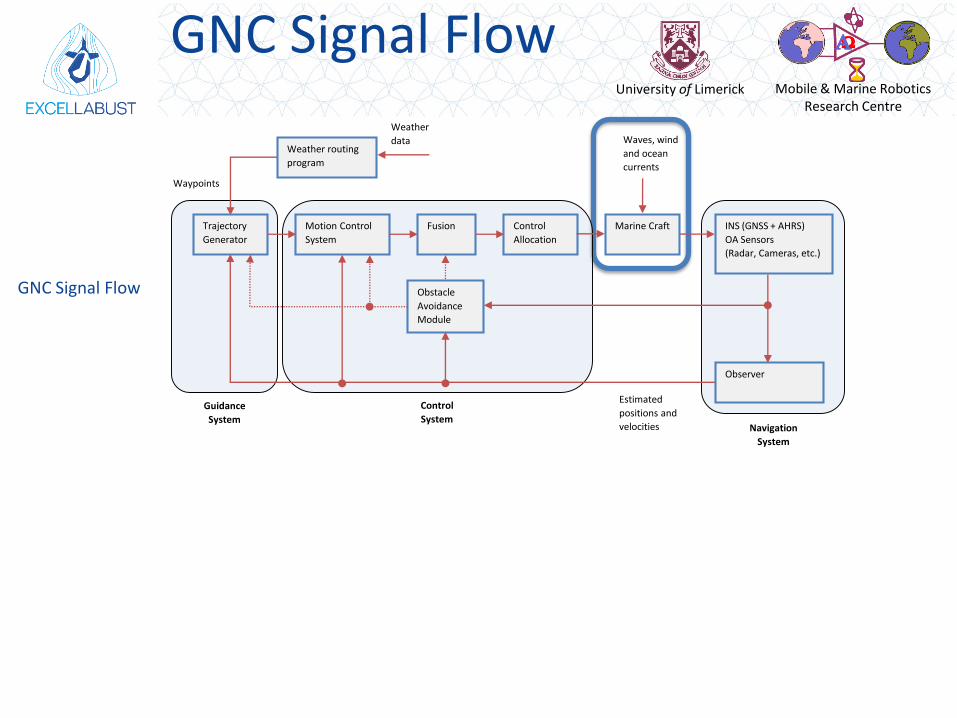
GNC Signal Flow
GNC Signal Flow
Weather routing
program
Trajectory
Generator
Motion Control
System
Control
Allocation
Fusion Marine Craft INS (GNSS + AHRS)
OA Sensors
(Radar, Cameras, etc.)
Observer
Weather
data
Waypoints
Guidance
System
Control
System
Obstacle
Avoidance
Module
Estimated
positions and
velocities Navigation
System
Waves, wind
and ocean
currents
Mobile & Marine Robotics Research Centre
University of Limerick
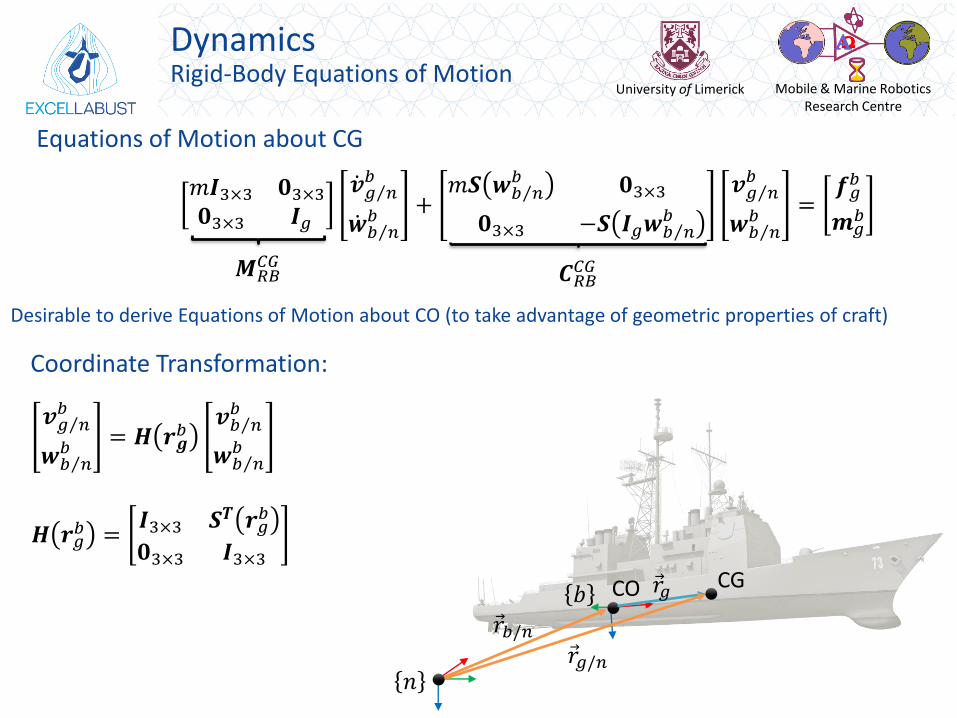
𝑛
𝑏 CO CG
Ԧ𝑟𝑏/𝑛
Ԧ𝑟𝑔
Ԧ𝑟𝑔/𝑛
DynamicsRigid-Body Equations of Motion
𝑚𝑰3×3 𝟎3×3𝟎3×3 𝑰𝑔
ሶ𝒗 Τ𝑔 𝑛𝑏
ሶ𝒘 Τ𝑏 𝑛𝑏
+𝑚𝑺 𝒘 Τ𝑏 𝑛
𝑏 𝟎3×3
𝟎3×3 −𝑺 𝑰𝑔𝒘 Τ𝑏 𝑛𝑏
𝒗 Τ𝑔 𝑛𝑏
𝒘 Τ𝑏 𝑛𝑏
=𝒇𝑔𝑏
𝒎𝑔𝑏
Equations of Motion about CG
Desirable to derive Equations of Motion about CO (to take advantage of geometric properties of craft)
Coordinate Transformation:
𝒗 Τ𝑔 𝑛𝑏
𝒘 Τ𝑏 𝑛𝑏
= 𝑯 𝒓𝒈𝑏
𝒗 Τ𝑏 𝑛𝑏
𝒘 Τ𝑏 𝑛𝑏
𝑯 𝒓𝑔𝑏 =
𝑰3×3 𝑺𝑻 𝒓𝑔𝑏
𝟎3×3 𝑰3×3
𝑴𝑅𝐵𝐶𝐺
𝑪𝑅𝐵𝐶𝐺
Mobile & Marine Robotics Research Centre
University of Limerick
DynamicsRigid-Body Equations of Motion
𝑴𝑅𝐵𝐶𝐺𝑯 𝒓𝑔
𝑏ሶ𝒗 Τ𝑏 𝑛𝑏
ሶ𝒘 Τ𝑏 𝑛𝑏 + 𝑪𝑅𝐵
𝐶𝐺𝑯 𝒓𝑔𝑏
𝒗 Τ𝑏 𝑛𝑏
𝒘 Τ𝑏 𝑛𝑏 =
𝒇𝑔𝑏
𝒎𝑔𝑏
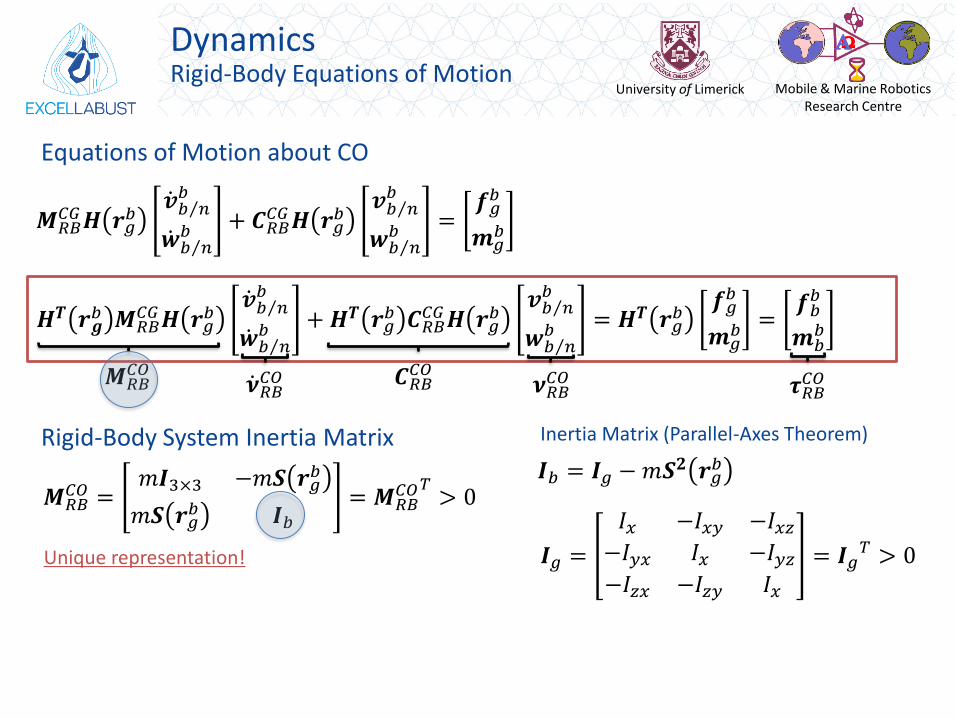
Equations of Motion about CO
𝑯𝑻 𝒓𝒈𝑏 𝑴𝑅𝐵
𝐶𝐺𝑯 𝒓𝑔𝑏
ሶ𝒗 Τ𝑏 𝑛𝑏
ሶ𝒘 Τ𝑏 𝑛𝑏 +𝑯𝑻 𝒓𝑔
𝑏 𝑪𝑅𝐵𝐶𝐺𝑯 𝒓𝑔
𝑏𝒗 Τ𝑏 𝑛𝑏
𝒘 Τ𝑏 𝑛𝑏 = 𝑯𝑻 𝒓𝑔
𝑏𝒇𝑔𝑏
𝒎𝑔𝑏 =
𝒇𝑏𝑏
𝒎𝑏𝑏
𝑴𝑅𝐵𝐶𝑂 𝑪𝑅𝐵
𝐶𝑂
𝑴𝑅𝐵𝐶𝑂 =
𝑚𝑰3×3 −𝑚𝑺 𝒓𝑔𝑏
𝑚𝑺 𝒓𝑔𝑏 𝑰𝑏
= 𝑴𝑅𝐵𝐶𝑂𝑇 > 0
Rigid-Body System Inertia Matrix Inertia Matrix (Parallel-Axes Theorem)
𝑰𝑏 = 𝑰𝑔 −𝑚𝑺𝟐 𝒓𝑔𝑏
𝑰𝑔 =
𝐼𝑥 −𝐼𝑥𝑦 −𝐼𝑥𝑧−𝐼𝑦𝑥 𝐼𝑥 −𝐼𝑦𝑧−𝐼𝑧𝑥 −𝐼𝑧𝑦 𝐼𝑥
= 𝑰𝑔𝑇 > 0Unique representation!
𝝉𝑅𝐵𝐶𝑂𝝂𝑅𝐵
𝐶𝑂ሶ𝝂𝑅𝐵𝐶𝑂
Mobile & Marine Robotics Research Centre
University of Limerick
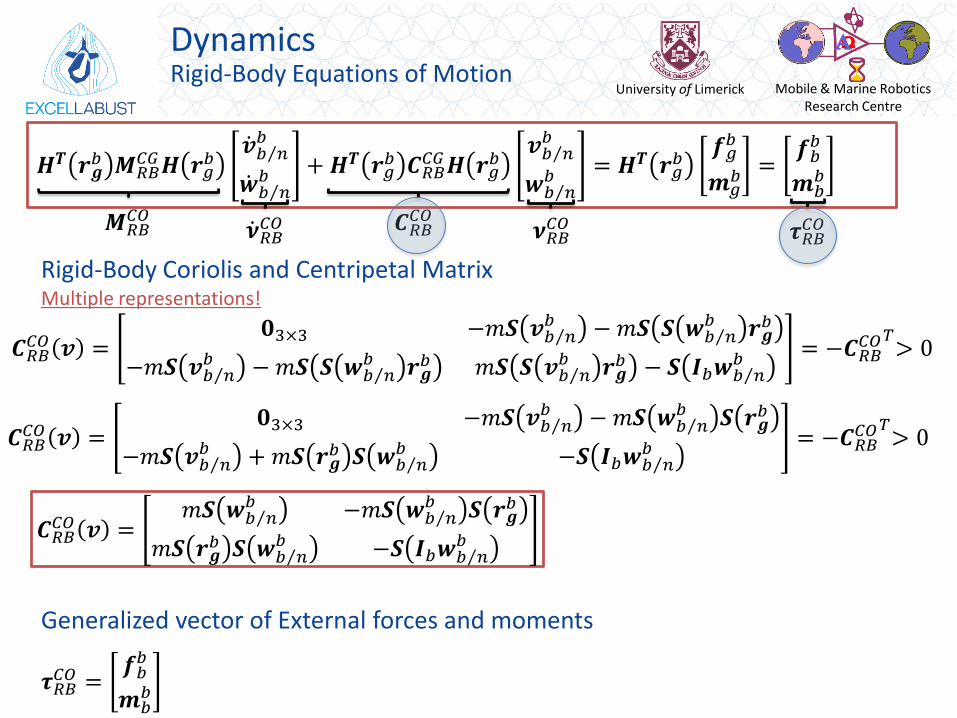
DynamicsRigid-Body Equations of Motion
𝑪𝑅𝐵𝐶𝑂 𝒗 =
𝟎3×3 −𝑚𝑺 𝒗 Τ𝑏 𝑛𝑏 −𝑚𝑺 𝑺 𝒘 Τ𝑏 𝑛
𝑏 𝒓𝒈𝑏
−𝑚𝑺 𝒗 Τ𝑏 𝑛𝑏 −𝑚𝑺 𝑺 𝒘 Τ𝑏 𝑛
𝑏 𝒓𝒈𝑏 𝑚𝑺 𝑺 𝒗 Τ𝑏 𝑛
𝑏 𝒓𝒈𝑏 − 𝑺 𝑰𝑏𝒘 Τ𝑏 𝑛
𝑏 = −𝑪𝑅𝐵𝐶𝑂𝑇> 0
Rigid-Body Coriolis and Centripetal MatrixMultiple representations!
𝑪𝑅𝐵𝐶𝑂 𝒗 =
𝟎3×3 −𝑚𝑺 𝒗 Τ𝑏 𝑛𝑏 −𝑚𝑺 𝒘 Τ𝑏 𝑛
𝑏 𝑺 𝒓𝒈𝑏
−𝑚𝑺 𝒗 Τ𝑏 𝑛𝑏 +𝑚𝑺 𝒓𝒈
𝑏 𝑺 𝒘 Τ𝑏 𝑛𝑏 −𝑺 𝑰𝑏𝒘 Τ𝑏 𝑛
𝑏 = −𝑪𝑅𝐵𝐶𝑂𝑇> 0
𝑪𝑅𝐵𝐶𝑂 𝒗 =
𝑚𝑺 𝒘 Τ𝑏 𝑛𝑏 −𝑚𝑺 𝒘 Τ𝑏 𝑛
𝑏 𝑺 𝒓𝒈𝑏
𝑚𝑺 𝒓𝒈𝑏 𝑺 𝒘 Τ𝑏 𝑛
𝑏 −𝑺 𝑰𝑏𝒘 Τ𝑏 𝑛𝑏
Generalized vector of External forces and moments
𝝉𝑅𝐵𝐶𝑂 =
𝒇𝑏𝑏
𝒎𝑏𝑏
𝑯𝑻 𝒓𝒈𝑏 𝑴𝑅𝐵
𝐶𝐺𝑯 𝒓𝑔𝑏
ሶ𝒗 Τ𝑏 𝑛𝑏
ሶ𝒘 Τ𝑏 𝑛𝑏 +𝑯𝑻 𝒓𝑔
𝑏 𝑪𝑅𝐵𝐶𝐺𝑯 𝒓𝑔
𝑏𝒗 Τ𝑏 𝑛𝑏
𝒘 Τ𝑏 𝑛𝑏 = 𝑯𝑻 𝒓𝑔
𝑏𝒇𝑔𝑏
𝒎𝑔𝑏 =
𝒇𝑏𝑏
𝒎𝑏𝑏
𝑴𝑅𝐵𝐶𝑂 𝑪𝑅𝐵
𝐶𝑂𝝉𝑅𝐵𝐶𝑂𝝂𝑅𝐵
𝐶𝑂ሶ𝝂𝑅𝐵𝐶𝑂
Mobile & Marine Robotics Research Centre
University of Limerick
DynamicsRigid-Body Equations of Motion
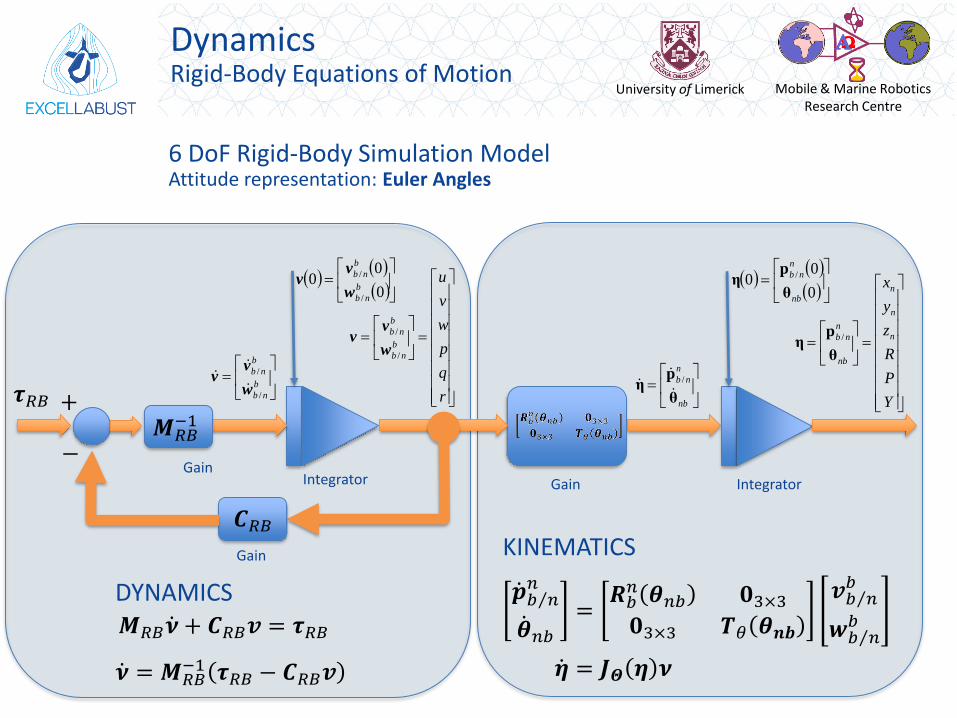
6 DoF Rigid-Body Simulation ModelAttitude representation: Euler Angles
r
q
p
w
v
u
b
nb
b
nb
/
/
w
vv
nb
n
nb
θ
pη
/
Y
P
R
z
y
x
n
n
n
nb
n
nb
θ
pη /
Gain Integrator
0
00 /
nb
n
nb
θ
pη
0
00
/
/
b
nb
b
nb
w
vv
ሶ𝒑 Τ𝑏 𝑛𝑛
ሶ𝜽𝑛𝑏=
𝑹𝑏𝑛 𝜽𝑛𝑏 𝟎3×3𝟎3×3 𝑻𝜃 𝜽𝒏𝒃
𝒗 Τ𝑏 𝑛𝑏
𝒘 Τ𝑏 𝑛𝑏
ሶ𝜼 = 𝑱𝜣 𝜼 𝝂
b
nb
b
nb
/
/
w
vv
𝑴𝑅𝐵 ሶ𝝂 + 𝑪𝑅𝐵𝒗 = 𝝉𝑅𝐵
ሶ𝝂 = 𝑴𝑅𝐵−1 𝝉𝑅𝐵 − 𝑪𝑅𝐵𝒗
Gain
𝑪𝑅𝐵KINEMATICS
DYNAMICS
+
−
𝝉𝑅𝐵𝑴𝑅𝐵
−1
GainIntegrator
Mobile & Marine Robotics Research Centre
University of Limerick
DynamicsRigid-Body Equations of Motion
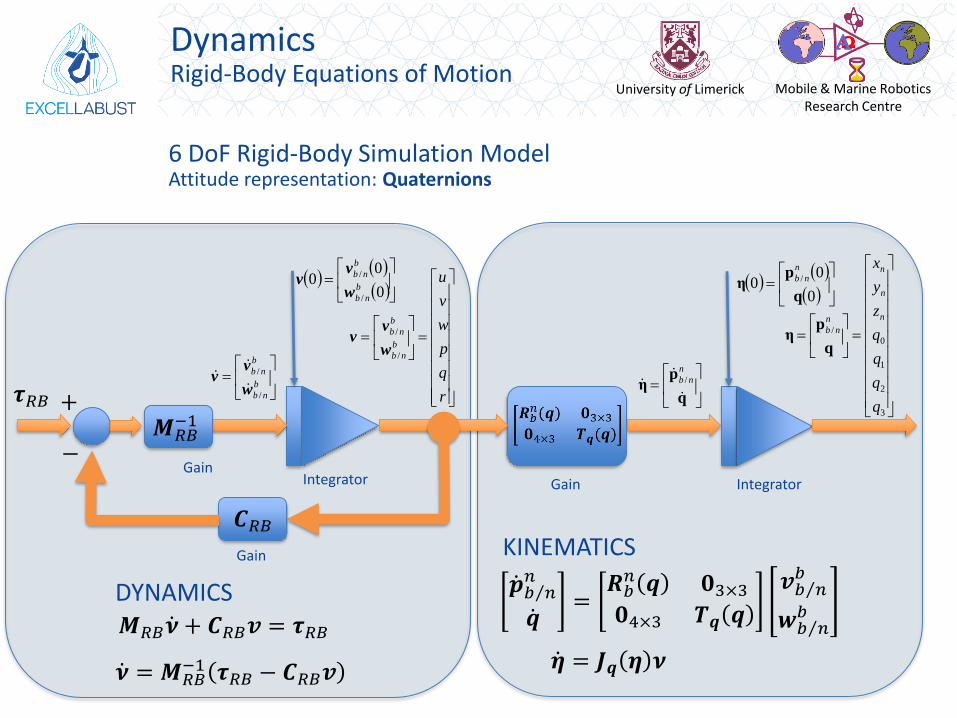
6 DoF Rigid-Body Simulation ModelAttitude representation: Quaternions
r
q
p
w
v
u
b
nb
b
nb
/
/
w
vv
Gain Integrator
0
00
/
/
b
nb
b
nb
w
vv
b
nb
b
nb
/
/
w
vv
𝑴𝑅𝐵 ሶ𝝂 + 𝑪𝑅𝐵𝒗 = 𝝉𝑅𝐵
ሶ𝝂 = 𝑴𝑅𝐵−1 𝝉𝑅𝐵 − 𝑪𝑅𝐵𝒗
Gain
𝑪𝑅𝐵KINEMATICS
DYNAMICS
+
−
𝝉𝑅𝐵𝑴𝑅𝐵
−1
GainIntegrator
q
pη
n
nb /
3
2
1
0
/
q
q
q
q
z
y
x
n
n
n
n
nb
q
pη
ሶ𝒑 Τ𝑏 𝑛𝑛
ሶ𝒒=
𝑹𝑏𝑛 𝒒 𝟎3×3𝟎4×3 𝑻𝒒 𝒒
𝒗 Τ𝑏 𝑛𝑏
𝒘 Τ𝑏 𝑛𝑏
ሶ𝜼 = 𝑱𝒒 𝜼 𝝂
0
00 /
q
pη
n
nb
Mobile & Marine Robotics Research Centre
University of Limerick
Dynamics6 DoF Equations of Motion (ROV)
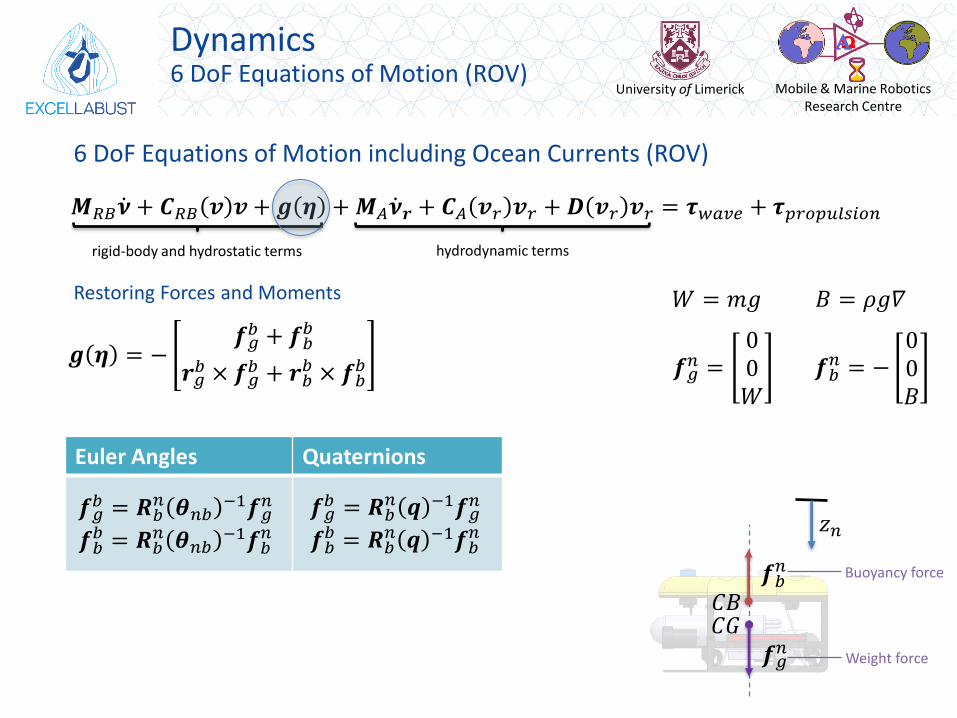
6 DoF Equations of Motion including Ocean Currents (ROV)
𝑴𝑅𝐵 ሶ𝝂 + 𝑪𝑅𝐵 𝒗 𝒗 + 𝒈 𝜼 +𝑴𝐴 ሶ𝝂𝒓 + 𝑪𝐴 𝒗𝑟 𝒗𝑟 + 𝑫 𝒗𝑟 𝒗𝑟 = 𝝉𝑤𝑎𝑣𝑒 + 𝝉𝑝𝑟𝑜𝑝𝑢𝑙𝑠𝑖𝑜𝑛
rigid-body and hydrostatic terms hydrodynamic terms
Restoring Forces and Moments 𝑊 = 𝑚𝑔 𝐵 = 𝜌𝑔𝛻
𝒈 𝜼 = −𝒇𝑔𝑏 + 𝒇𝑏
𝑏
𝒓𝑔𝑏 × 𝒇𝑔
𝑏 + 𝒓𝑏𝑏 × 𝒇𝑏
𝑏 𝒇𝑔𝑛 =
00𝑊
𝒇𝑏𝑛 = −
00𝐵
𝒇𝑔𝑛
𝒇𝑏𝑛
𝐶𝐵
Buoyancy force
Weight force
𝐶𝐺
𝑧𝑛
Euler Angles Quaternions
𝒇𝑔𝑏 = 𝑹𝑏
𝑛 𝜽𝑛𝑏−1𝒇𝑔
𝑛
𝒇𝑏𝑏 = 𝑹𝑏
𝑛 𝜽𝑛𝑏−1𝒇𝑏
𝑛
𝒇𝑔𝑏 = 𝑹𝑏
𝑛 𝒒 −1𝒇𝑔𝑛
𝒇𝑏𝑏 = 𝑹𝑏
𝑛 𝒒 −1𝒇𝑏𝑛
Mobile & Marine Robotics Research Centre
University of Limerick
Dynamics6 DoF Equations of Motion (ROV)
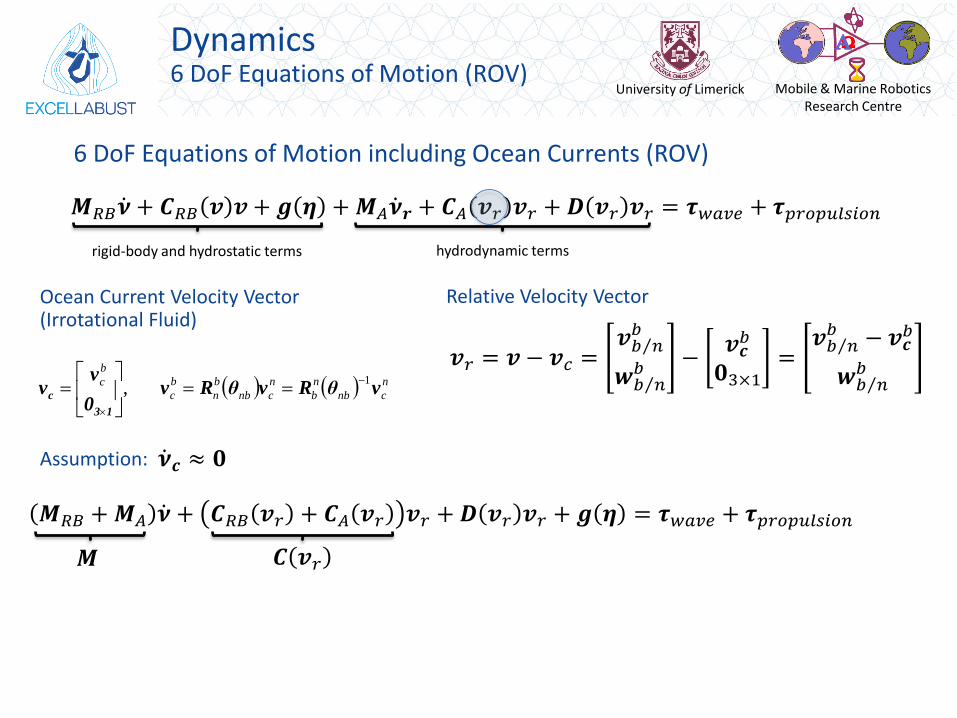
6 DoF Equations of Motion including Ocean Currents (ROV)
𝑴𝑅𝐵 ሶ𝝂 + 𝑪𝑅𝐵 𝒗 𝒗 + 𝒈 𝜼 +𝑴𝐴 ሶ𝝂𝒓 + 𝑪𝐴 𝒗𝑟 𝒗𝑟 + 𝑫 𝒗𝑟 𝒗𝑟 = 𝝉𝑤𝑎𝑣𝑒 + 𝝉𝑝𝑟𝑜𝑝𝑢𝑙𝑠𝑖𝑜𝑛
rigid-body and hydrostatic terms hydrodynamic terms
Ocean Current Velocity Vector(Irrotational Fluid)
n
cnb
n
b
n
cnb
b
n
b
c
b
c vθRvθRv0
vv
13
c
1,
Relative Velocity Vector
𝒗𝑟 = 𝒗 − 𝒗𝑐 =𝒗 Τ𝑏 𝑛𝑏
𝒘 Τ𝑏 𝑛𝑏 −
𝒗𝒄𝑏
𝟎3×1=
𝒗 Τ𝑏 𝑛𝑏 − 𝒗𝒄
𝑏
𝒘 Τ𝑏 𝑛𝑏
Assumption: ሶ𝝂𝒄 ≈ 𝟎
𝑴𝑅𝐵 +𝑴𝐴 ሶ𝝂 + 𝑪𝑅𝐵 𝒗𝑟 + 𝑪𝐴 𝒗𝑟 𝒗𝑟 +𝑫 𝒗𝑟 𝒗𝑟 + 𝒈 𝜼 = 𝝉𝑤𝑎𝑣𝑒 + 𝝉𝑝𝑟𝑜𝑝𝑢𝑙𝑠𝑖𝑜𝑛
𝑴 𝑪 𝒗𝑟
Mobile & Marine Robotics Research Centre
University of Limerick
Dynamics6 DoF Equations of Motion (ROV)
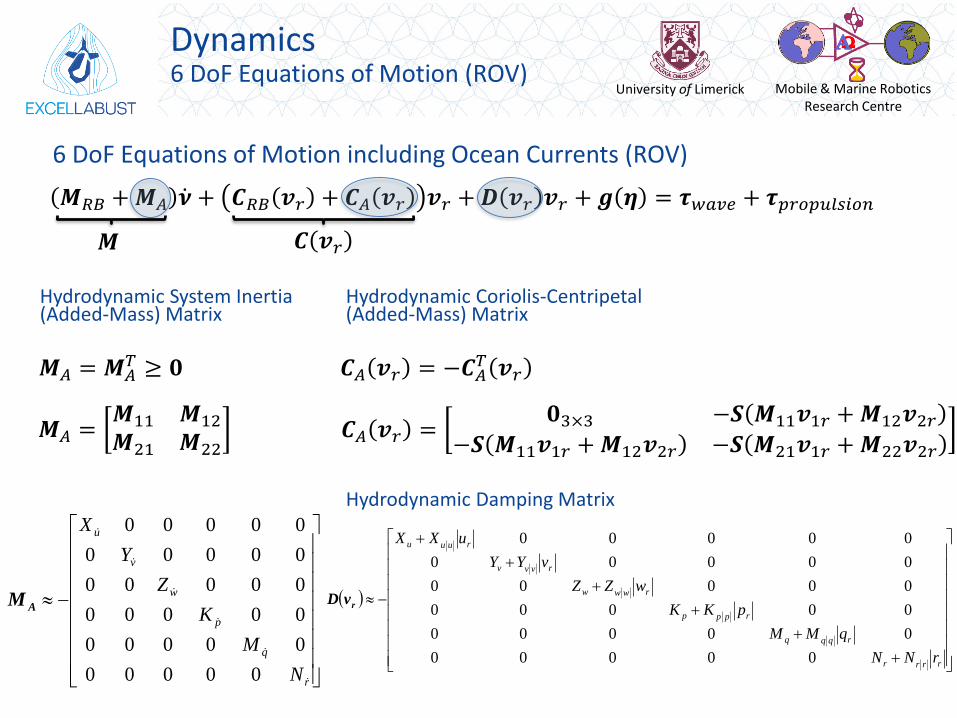
6 DoF Equations of Motion including Ocean Currents (ROV)
Hydrodynamic System Inertia (Added-Mass) Matrix
Hydrodynamic Coriolis-Centripetal (Added-Mass) Matrix
𝑴𝑅𝐵 +𝑴𝐴 ሶ𝝂 + 𝑪𝑅𝐵 𝒗𝑟 + 𝑪𝐴 𝒗𝑟 𝒗𝑟 +𝑫 𝒗𝑟 𝒗𝑟 + 𝒈 𝜼 = 𝝉𝑤𝑎𝑣𝑒 + 𝝉𝑝𝑟𝑜𝑝𝑢𝑙𝑠𝑖𝑜𝑛
𝑴 𝑪 𝒗𝑟
𝑴𝐴 = 𝑴𝐴𝑇 ≥ 𝟎
r
q
p
w
v
u
N
M
K
Z
Y
X
00000
00000
00000
00000
00000
00000
AM
𝑴𝐴 =𝑴11 𝑴12
𝑴21 𝑴22𝑪𝐴 𝒗𝑟 =
𝟎3×3 −𝑺 𝑴11𝒗1𝑟 +𝑴12𝒗2𝑟−𝑺 𝑴11𝒗1𝑟 +𝑴12𝒗2𝑟 −𝑺 𝑴21𝒗1𝑟 +𝑴22𝒗2𝑟
𝑪𝐴 𝒗𝑟 = −𝑪𝐴𝑇 𝒗𝑟
Hydrodynamic Damping Matrix
rrrr
rqqq
rppp
rwww
rvvv
ruuu
rNN
qMM
pKK
wZZ
vYY
uXX
00000
00000
00000
00000
00000
00000
rvD
Mobile & Marine Robotics Research Centre
University of Limerick
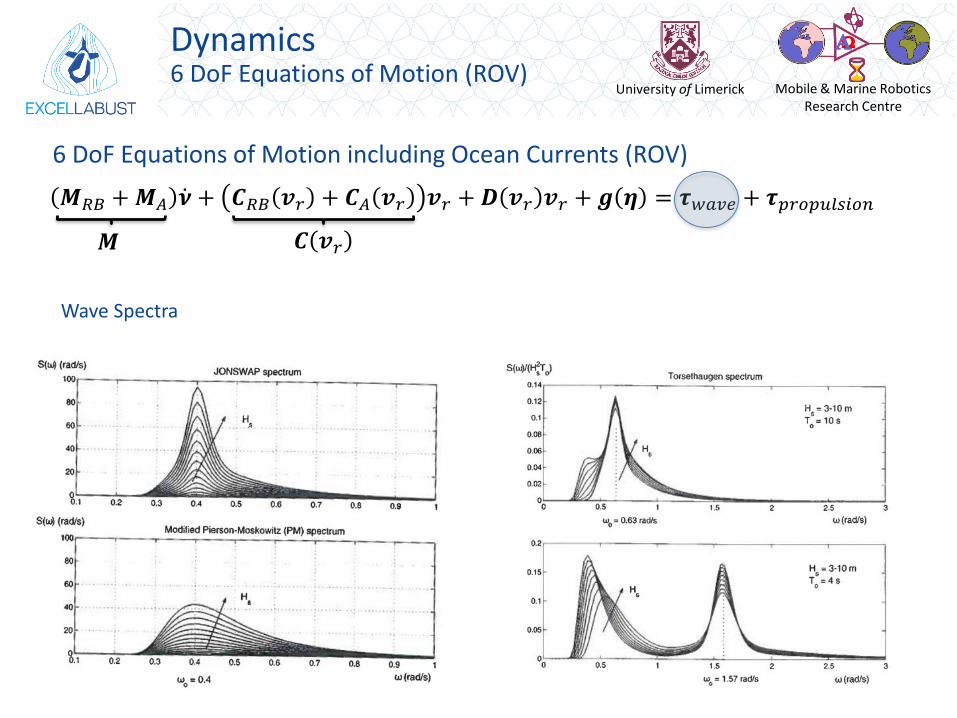
Dynamics6 DoF Equations of Motion (ROV)
Wave Spectra
6 DoF Equations of Motion including Ocean Currents (ROV)
𝑴𝑅𝐵 +𝑴𝐴 ሶ𝝂 + 𝑪𝑅𝐵 𝒗𝑟 + 𝑪𝐴 𝒗𝑟 𝒗𝑟 +𝑫 𝒗𝑟 𝒗𝑟 + 𝒈 𝜼 = 𝝉𝑤𝑎𝑣𝑒 + 𝝉𝑝𝑟𝑜𝑝𝑢𝑙𝑠𝑖𝑜𝑛
𝑴 𝑪 𝒗𝑟

Mobile & Marine Robotics Research Centre
University of Limerick
Dynamics6 DoF Equations of Motion (ROV)
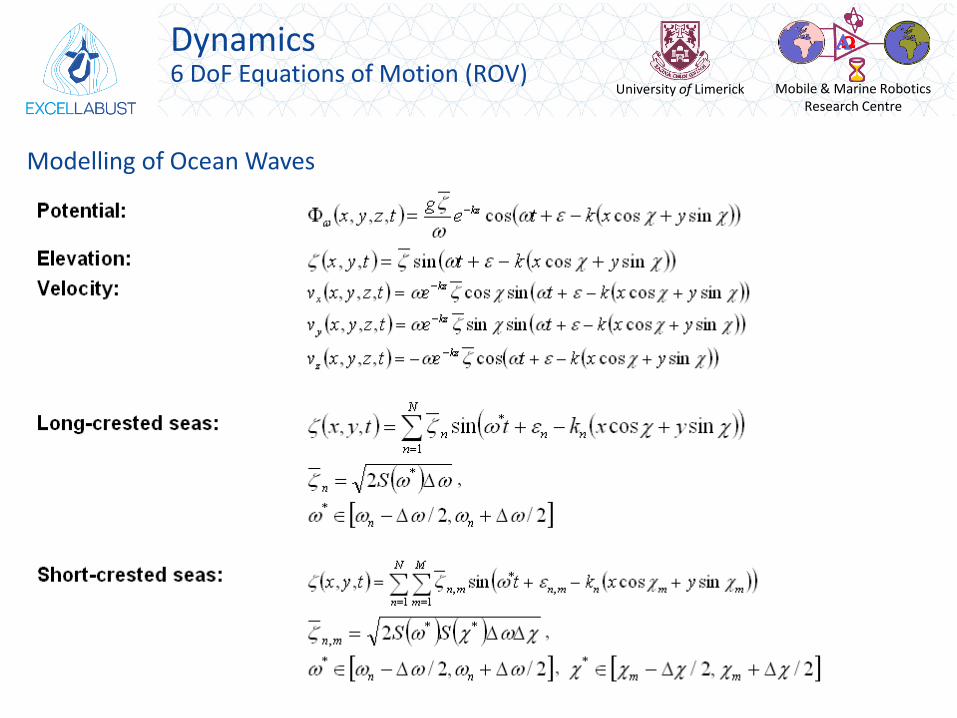
Modelling of Ocean Waves
Reference:T. Perez. Ship Motion Control Course Keeping and Roll Stabilisation using Rudders and Fins. Springer, 2005.
Mobile & Marine Robotics Research Centre
University of Limerick
Dynamics6 DoF Equations of Motion (ROV)
Modelling of Ocean Waves
Mobile & Marine Robotics Research Centre
University of Limerick
Dynamics6 DoF Equations of Motion (ROV)
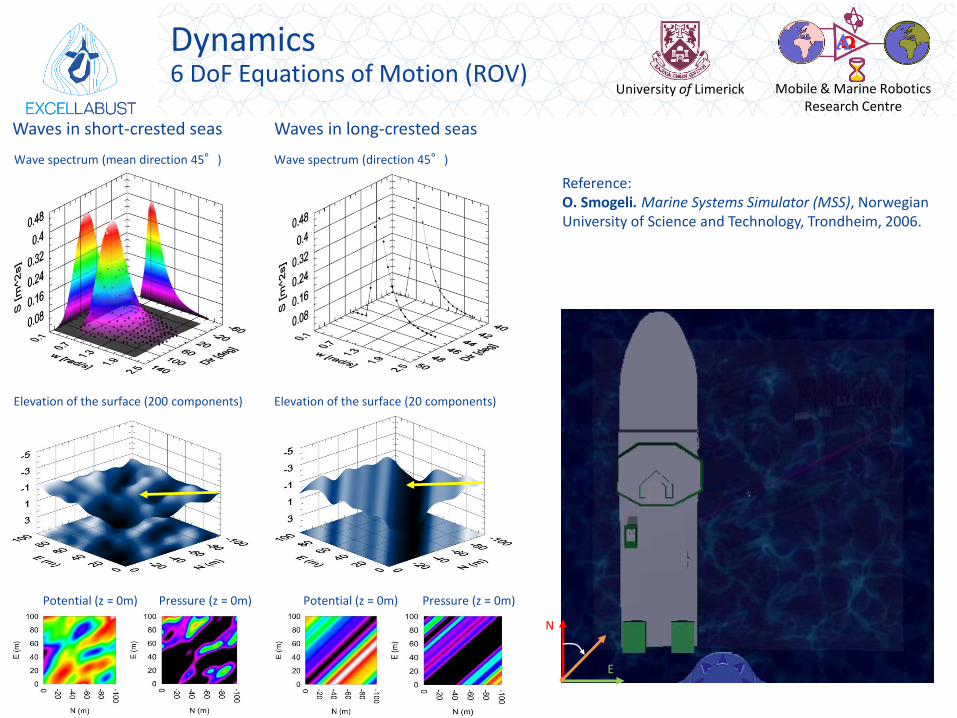
Waves in short-crested seas
Wave spectrum (mean direction 45°)
Elevation of the surface (200 components)
Potential (z = 0m) Pressure (z = 0m)
Waves in long-crested seas
Wave spectrum (direction 45°)
Elevation of the surface (20 components)
Potential (z = 0m) Pressure (z = 0m)
Reference:O. Smogeli. Marine Systems Simulator (MSS), Norwegian University of Science and Technology, Trondheim, 2006.
N
E
Mobile & Marine Robotics Research Centre
University of Limerick
KinematicsTransformations BODY-NEDQuaternions
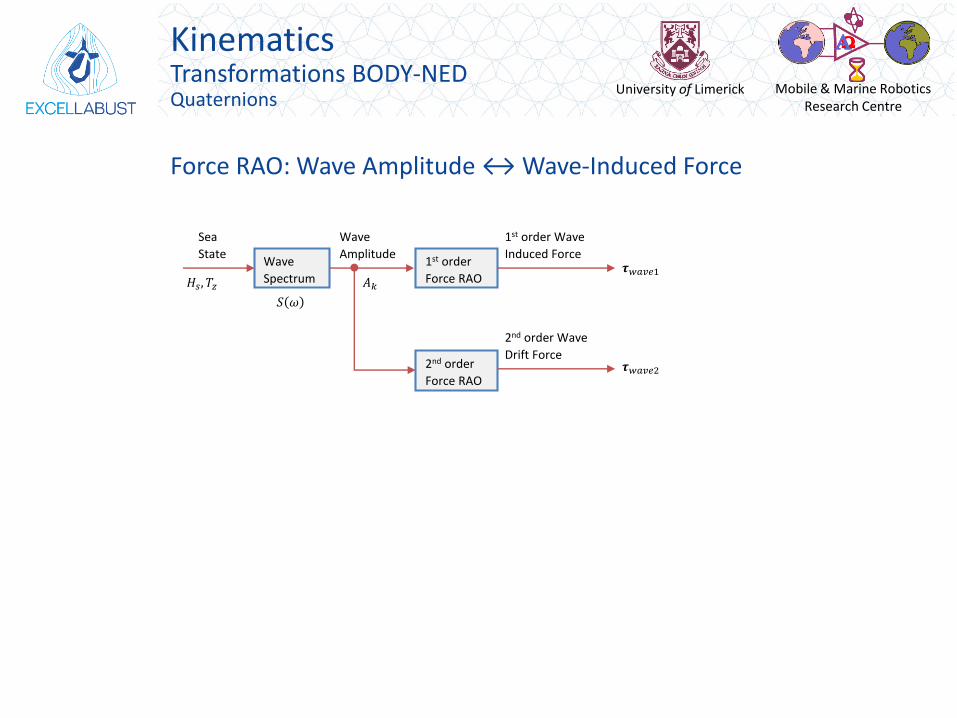
Wave
Spectrum
1st order
Force RAO
Sea
State
𝑆 𝜔
𝐻𝑠, 𝑇𝑧
Wave
Amplitude
2nd order
Force RAO
1st order Wave
Induced Force
𝐴𝑘
2nd order Wave
Drift Force
𝝉𝑤𝑎𝑣𝑒1
𝝉𝑤𝑎𝑣𝑒2
Force RAO: Wave Amplitude ↔ Wave-Induced Force
Mobile & Marine Robotics Research Centre
University of Limerick
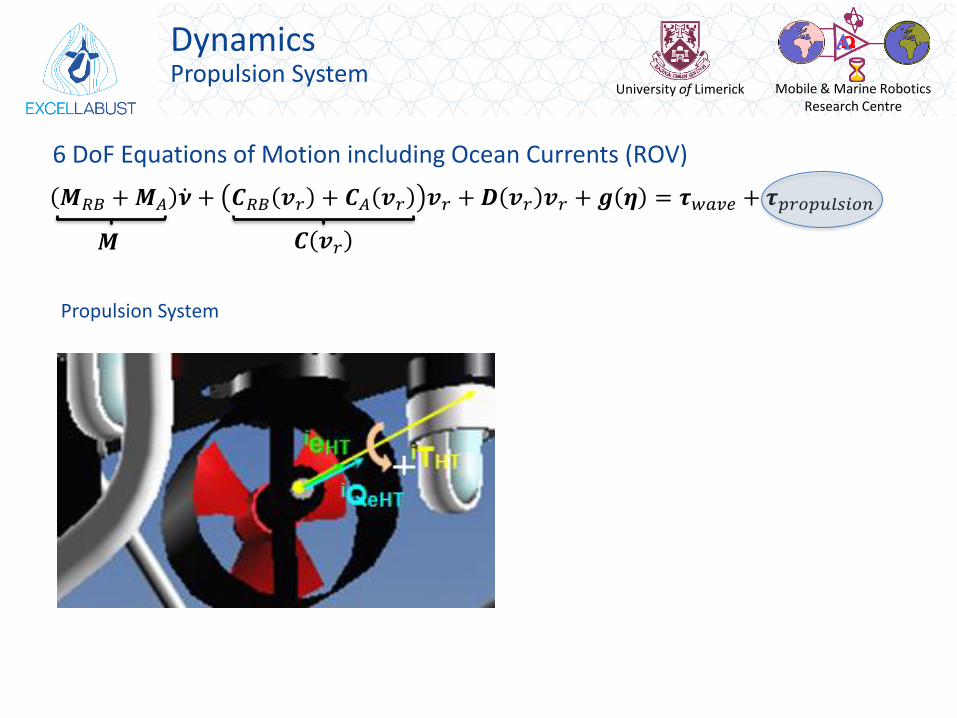
DynamicsPropulsion System
Propulsion System
6 DoF Equations of Motion including Ocean Currents (ROV)
𝑴𝑅𝐵 +𝑴𝐴 ሶ𝝂 + 𝑪𝑅𝐵 𝒗𝑟 + 𝑪𝐴 𝒗𝑟 𝒗𝑟 +𝑫 𝒗𝑟 𝒗𝑟 + 𝒈 𝜼 = 𝝉𝑤𝑎𝑣𝑒 + 𝝉𝑝𝑟𝑜𝑝𝑢𝑙𝑠𝑖𝑜𝑛
𝑴 𝑪 𝒗𝑟
Mobile & Marine Robotics Research Centre
University of Limerick
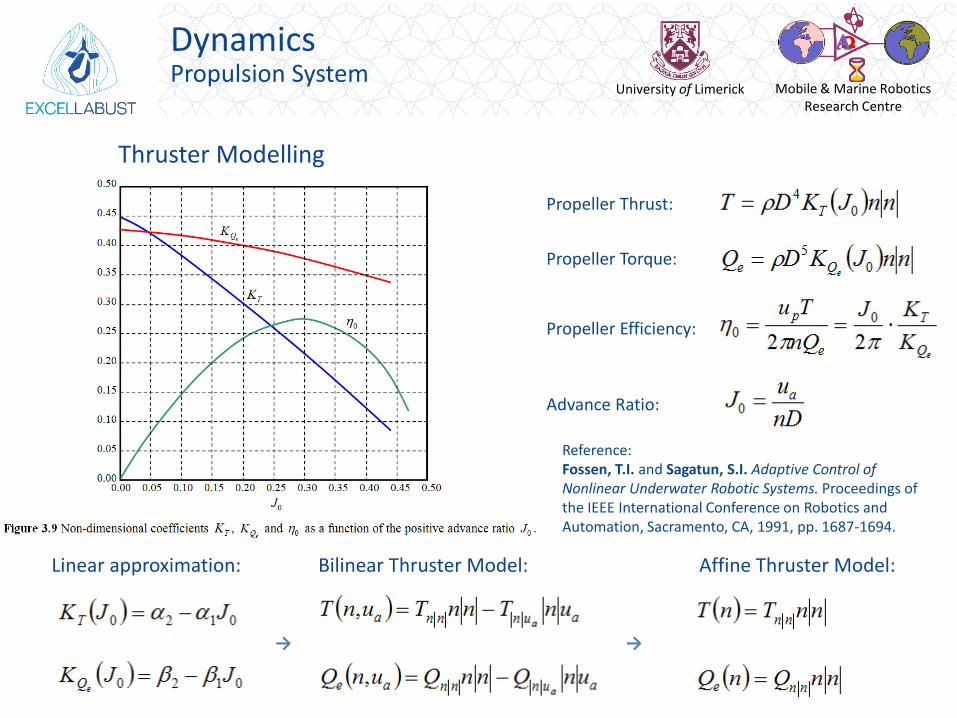
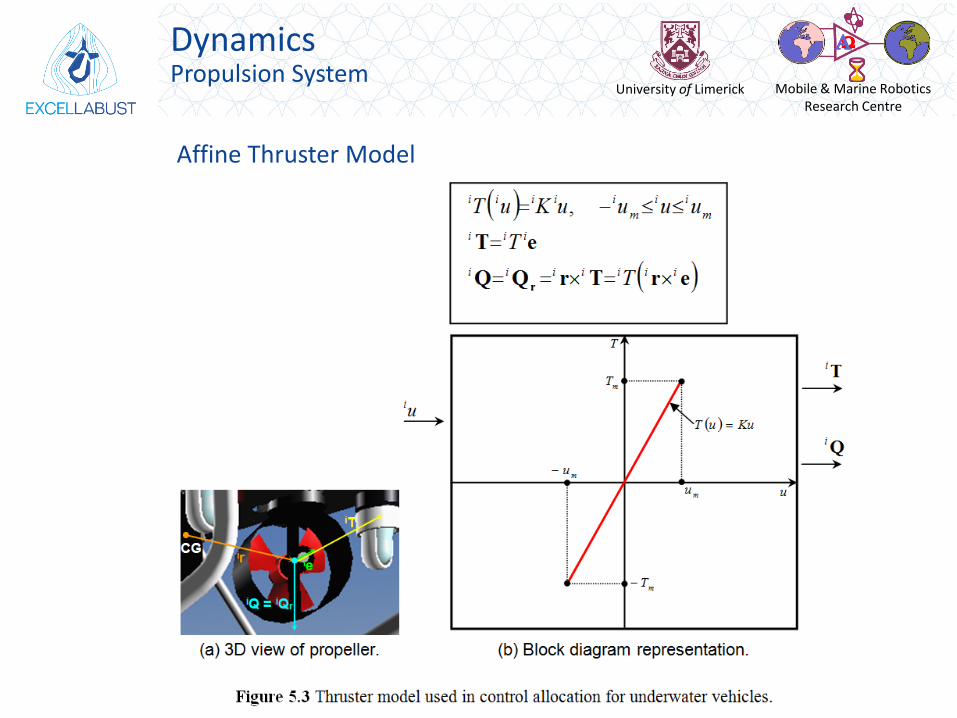
Thruster Modelling
Propeller Thrust:
Propeller Torque:
Propeller Efficiency:
Advance Ratio:
→
Bilinear Thruster Model:Linear approximation:
→
Affine Thruster Model:
Reference:Fossen, T.I. and Sagatun, S.I. Adaptive Control of Nonlinear Underwater Robotic Systems. Proceedings of the IEEE International Conference on Robotics and Automation, Sacramento, CA, 1991, pp. 1687-1694.
DynamicsPropulsion System
Mobile & Marine Robotics Research Centre
University of Limerick
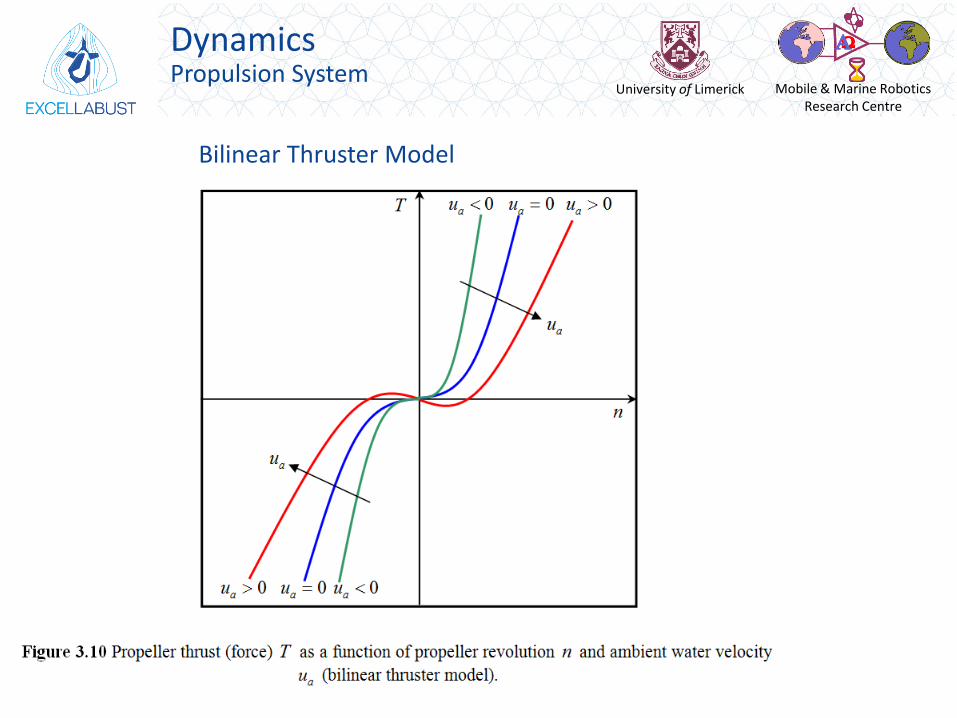
Bilinear Thruster Model
DynamicsPropulsion System
Mobile & Marine Robotics Research Centre
University of Limerick
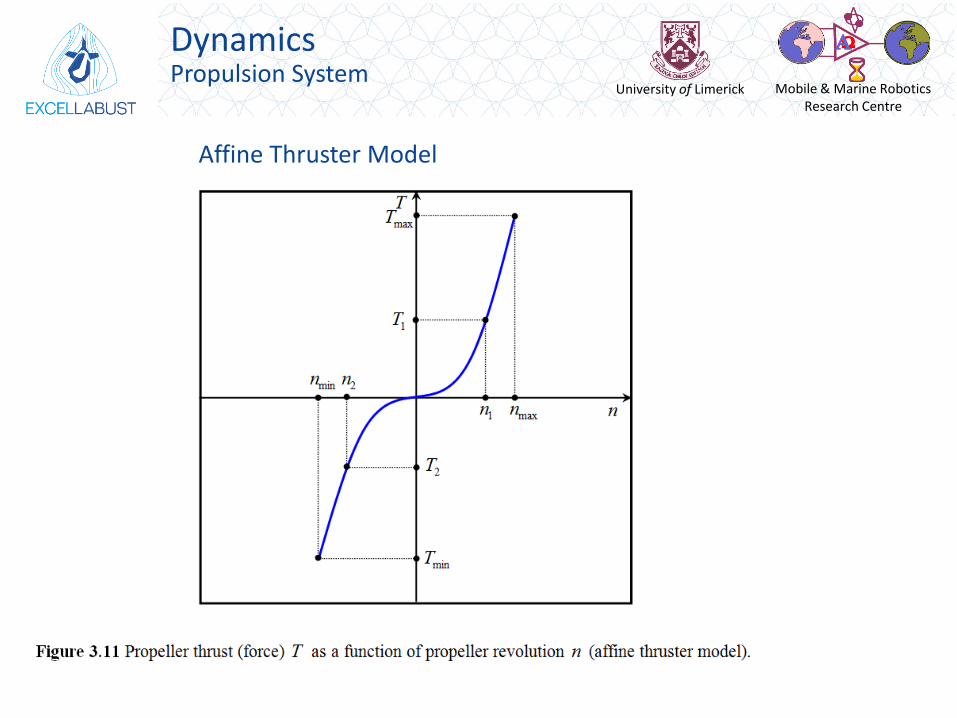
Affine Thruster Model
DynamicsPropulsion System
Mobile & Marine Robotics Research Centre
University of Limerick
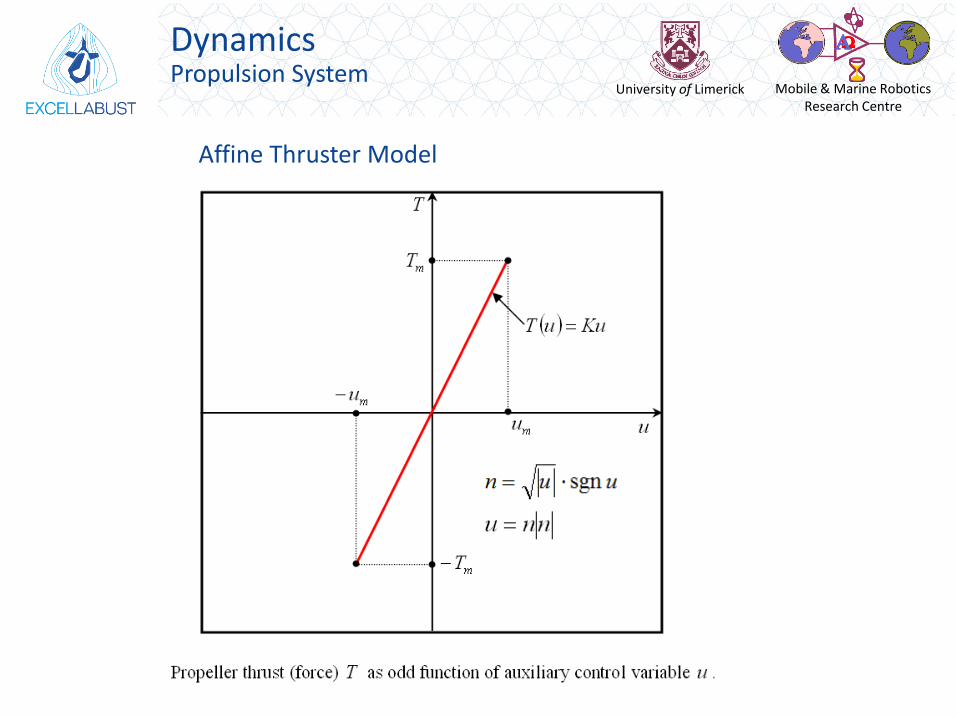
Affine Thruster Model
DynamicsPropulsion System
Mobile & Marine Robotics Research Centre
University of Limerick
Affine Thruster Model
DynamicsPropulsion System
Mobile & Marine Robotics Research Centre
University of Limerick
DynamicsPropulsion System
Full Thruster Model
Mobile & Marine Robotics Research Centre
University of Limerick
DynamicsSimulation Diagrams
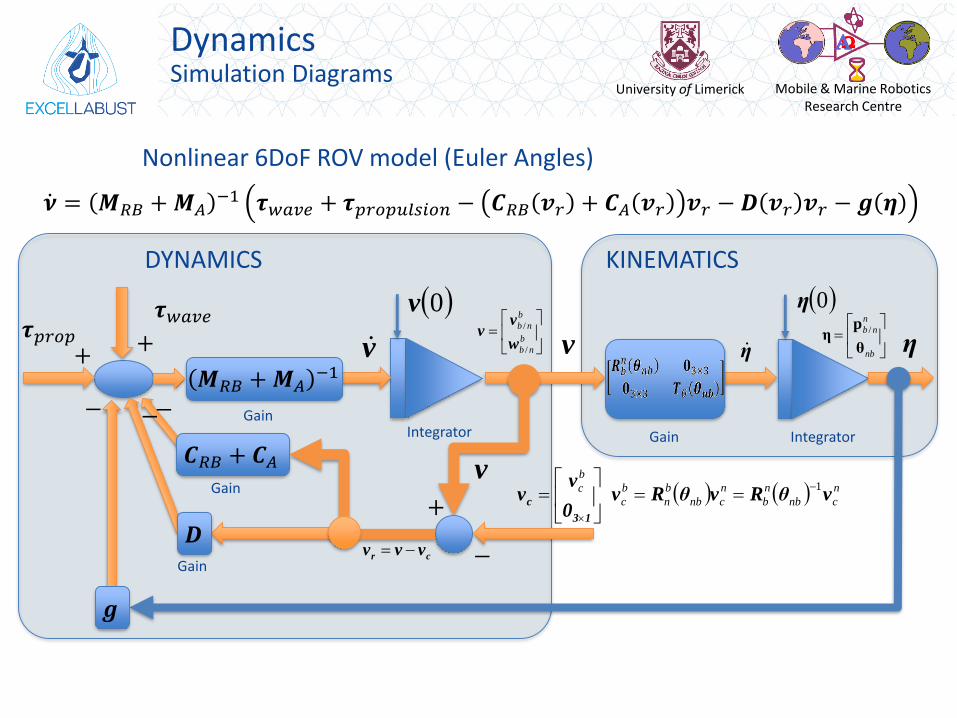
Nonlinear 6DoF ROV model (Euler Angles)
ሶ𝝂 = 𝑴𝑅𝐵 +𝑴𝐴−1 𝝉𝑤𝑎𝑣𝑒 + 𝝉𝑝𝑟𝑜𝑝𝑢𝑙𝑠𝑖𝑜𝑛 − 𝑪𝑅𝐵 𝒗𝑟 + 𝑪𝐴 𝒗𝑟 𝒗𝑟 − 𝑫 𝒗𝑟 𝒗𝑟 − 𝒈 𝜼
v η η
Gain Integrator
0η 0v
v
Gain
KINEMATICSDYNAMICS
+𝝉𝑝𝑟𝑜𝑝
GainIntegrator
n
cnb
n
b
n
cnb
b
n
b
c
b
c vθRvθRv0
vv
13
c
1
v
+
−
𝑴𝑅𝐵 +𝑴𝐴−1
𝝉𝑤𝑎𝑣𝑒
Gaincr vvv
𝑪𝑅𝐵 + 𝑪𝐴
−
𝑫
−−
𝒈
b
nb
b
nb
/
/
w
vv
nb
n
nb
θ
pη /
+
Mobile & Marine Robotics Research Centre
University of Limerick
DynamicsSimulation Diagrams
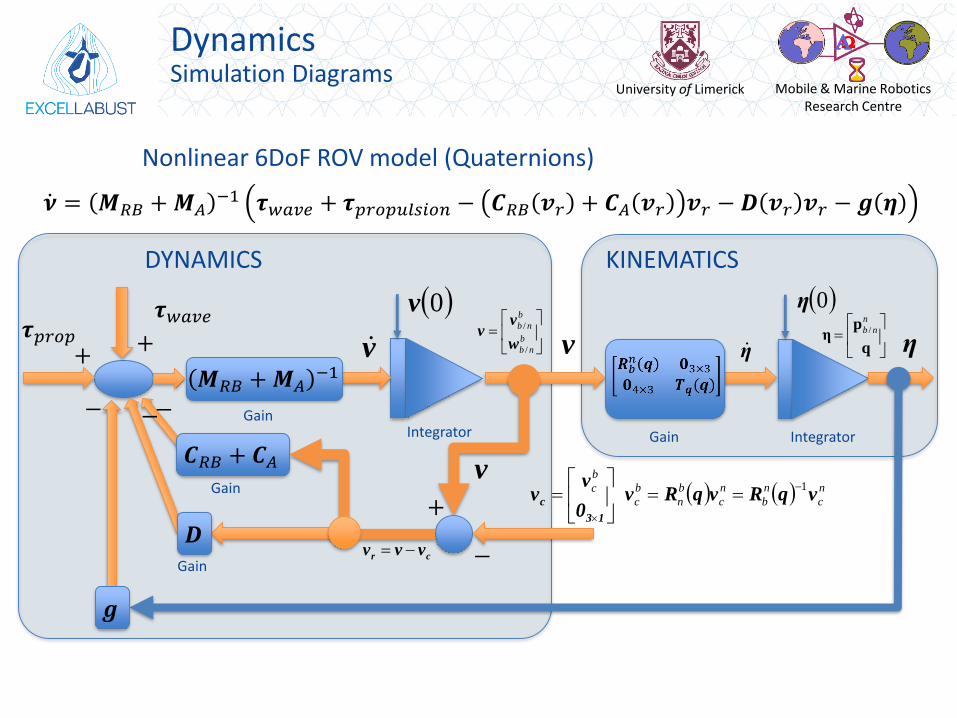
Nonlinear 6DoF ROV model (Quaternions)
ሶ𝝂 = 𝑴𝑅𝐵 +𝑴𝐴−1 𝝉𝑤𝑎𝑣𝑒 + 𝝉𝑝𝑟𝑜𝑝𝑢𝑙𝑠𝑖𝑜𝑛 − 𝑪𝑅𝐵 𝒗𝑟 + 𝑪𝐴 𝒗𝑟 𝒗𝑟 − 𝑫 𝒗𝑟 𝒗𝑟 − 𝒈 𝜼
v η η
Gain Integrator
0η 0v
v
Gain
KINEMATICSDYNAMICS
+𝝉𝑝𝑟𝑜𝑝
GainIntegrator
n
c
n
b
n
c
b
n
b
c
b
c vqRvqRv0
vv
13
c
1
v
+
−
𝑴𝑅𝐵 +𝑴𝐴−1
𝝉𝑤𝑎𝑣𝑒
Gaincr vvv
𝑪𝑅𝐵 + 𝑪𝐴
−
𝑫
−−
𝒈
b
nb
b
nb
/
/
w
vv
q
pη
n
nb /
+
