mech550f_l15_musynthesis1
TRANSCRIPT

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 1/23
2009/10 T1 MECH550F : Multivariable Feedback Control 1
MECH550F: MultivariableMECH550F: Multivariable
Feedback ControlFeedback Control
Dr. Ryozo NagamuneDr. Ryozo Nagamune
Department of Mechanical EngineeringDepartment of Mechanical EngineeringUniversity of British ColumbiaUniversity of British Columbia
Lecture 15Lecture 15
μ--synthesissynthesis

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 2/23
2009/10 T1 MECH550F : Multivariable Feedback Control 2
Review and todayReview and today’’s topics topic
In the previous lectures, weIn the previous lectures, we
have studiedhave studied structured singular valuestructured singular value μμ..
μμ--analysisanalysis of a feedback system.of a feedback system.(A controller K is given.)(A controller K is given.)
In todayIn today’’s lecture, we will studys lecture, we will study
μμ--synthesissynthesis of a feedbackof a feedbacksystem. (K is to be designed.)system. (K is to be designed.)

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 3/23
2009/10 T1 MECH550F : Multivariable Feedback Control 3
μμ--analysis (review)analysis (review)
UBUB
LBLB
Robustly stable caseRobustly stable case
UBUB
LBLB
Not robustly stable caseNot robustly stable case

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 4/23
2009/10 T1 MECH550F : Multivariable Feedback Control 4
Upper bound of Upper bound of μμ (review)(review)
Note: D andNote: D and ΔΔ
commute.commute.
For a complex matrix MFor a complex matrix M

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 5/23
2009/10 T1 MECH550F : Multivariable Feedback Control 5
μμ--synthesis problemsynthesis problem
Design a nominally stabilizing K Design a nominally stabilizing K
solving a minimization problemsolving a minimization problem
(Minimizing μ
upper bound over frequencies.)
(Minimizing scaled H∞ norm.)

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 6/23
2009/10 T1 MECH550F : Multivariable Feedback Control 6
Scaled HScaled H∞∞
minimizationminimization
If the minimized value is less than 1, then theIf the minimized value is less than 1, then theobtained K is a robust stabilizing controller.obtained K is a robust stabilizing controller.
The cost function is The cost function is nonconvexnonconvex w.r.tw.r.t. D & K.. D & K.
If we fix D, it is (convex!)If we fix D, it is (convex!) HH∞∞ optimal controlleroptimal controller
designdesign.. If we fix K, it is (convex!)If we fix K, it is (convex!) μμ--analysisanalysis..
We use theWe use the DD--K iterationK iteration to find a local optimum.to find a local optimum.

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 7/23
2009/10 T1 MECH550F : Multivariable Feedback Control 7
DD--K iteration (K iteration (dksyn.mdksyn.m))
Controller designController design
Controller analysisController analysis
Scaling designScaling design
Initialization of DInitialization of D
K K --design (with fixed D)design (with fixed D)
DD--design (with fixed K)design (with fixed K)
OK?OK? endendyesyes
nono

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 8/23
2009/10 T1 MECH550F : Multivariable Feedback Control 8
Initialization of Initialization of D(sD(s))
One standard choice of One standard choice of D(sD(s) is) is
Different initial DDifferent initial D
’’s will result ins will result in
different final results, due todifferent final results, due tononconvexitynonconvexity of the optimizationof the optimizationproblem.problem.
InitializationInitialization
K K --designdesign
DD--designdesign
OK?OK? endendyesyes
nono

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 9/23
2009/10 T1 MECH550F : Multivariable Feedback Control 9
Design of Design of K(sK(s))
For the fixedFor the fixed D(sD(s), design scaled), design scaled
((sub)optimalsub)optimal HH∞∞ controllercontroller
hinfsyn.mhinfsyn.m
InitializationInitialization
K K --designdesign
DD--designdesign
OK?OK? endendyesyes
nono

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 10/23
2009/10 T1 MECH550F : Multivariable Feedback Control 10
Analysis of Analysis of K(sK(s))
Analyze the designedAnalyze the designed K(sK(s) by upper) by upper
bound of bound of μμ--value.value. In other words, forIn other words, for griddedgridded frequencyfrequency
ωω, compute (with, compute (with mussv.mmussv.m))
Check if it is satisfactory.Check if it is satisfactory.
InitializationInitialization
K K --designdesign
DD--designdesign
OK?OK? endendyesyes
nono
7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 11/23
2009/10 T1 MECH550F : Multivariable Feedback Control 11
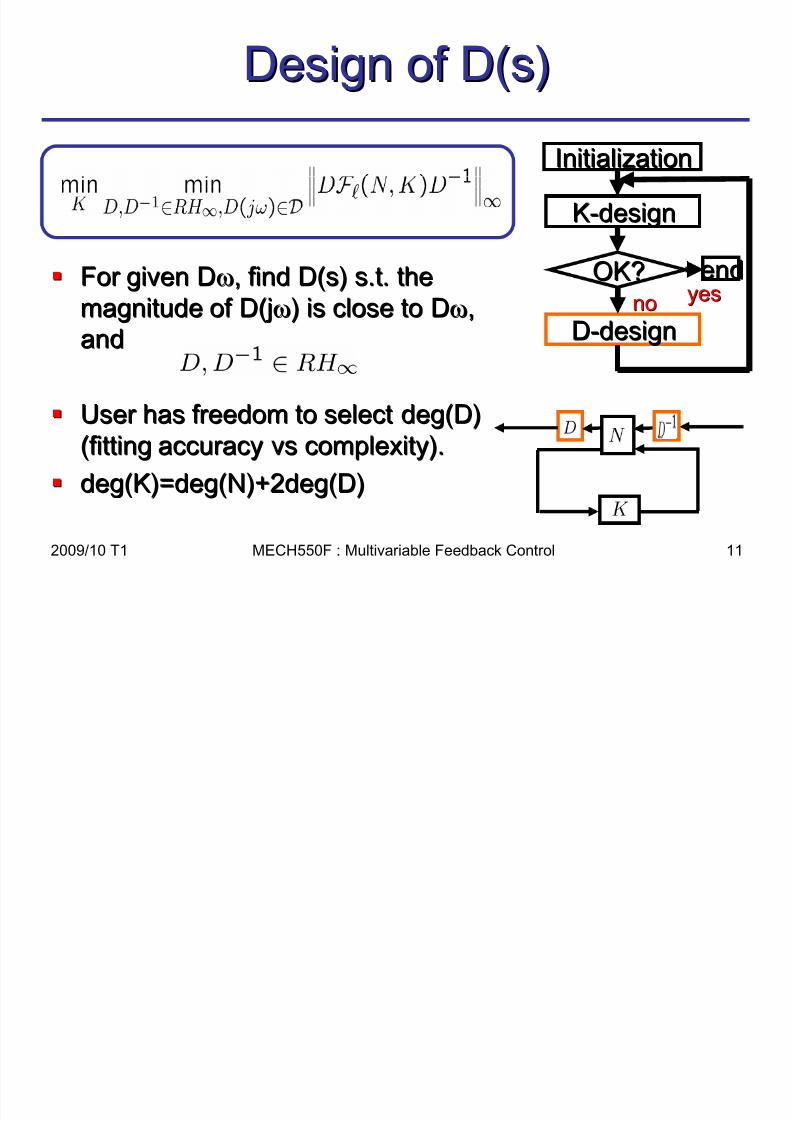
Design of Design of D(sD(s))
For givenFor given DDωω, find, find D(sD(s)) s.ts.t. the. the
magnitude of magnitude of D(jD(jωω) is close to) is close to DDωω,,andand
User has freedom to selectUser has freedom to select deg(Ddeg(D))(fitting accuracy(fitting accuracy vsvs complexity).complexity).
deg(K deg(K )=deg(N)+2deg(D))=deg(N)+2deg(D)
InitializationInitialization
K K --designdesign
DD--designdesign
OK?OK? endendyesyes
nono

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 12/23
2009/10 T1 MECH550F : Multivariable Feedback Control 12
Remarks on DRemarks on D--K iterationK iteration
DD--K iteration can find only a local optimum, andK iteration can find only a local optimum, and
there is no guarantee to find a global optimum.there is no guarantee to find a global optimum. Practical experience suggests that the methodPractical experience suggests that the method
works well in most cases.works well in most cases.
Final controller andFinal controller and μμ--value depend on:value depend on:
Initial choice of Initial choice of D(sD(s))
Order of Order of D(sD(s) to fit) to fit DDωω Numerical accuracy in optimization etc.Numerical accuracy in optimization etc.

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 13/23
2009/10 T1 MECH550F : Multivariable Feedback Control 13
Example (in Help of Example (in Help of dksyn.mdksyn.m))
Design K Design K s.ts.t..

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 14/23
2009/10 T1 MECH550F : Multivariable Feedback Control 14
Example: Bode plot of Example: Bode plot of inv(Wpinv(Wp))
10-4
10-3
10-2
10-1
100
101
102
-40
-30
-20
-10
0
10
20
M a g n i t u d e ( d B )
Bode Diagram
Frequency (rad/sec)

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 15/23
2009/10 T1 MECH550F : Multivariable Feedback Control 15
Example: Extracting K Example: Extracting K

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 16/23
2009/10 T1 MECH550F : Multivariable Feedback Control 16
Example:Example: MatlabMatlab codecode
ControllerController Optimized costOptimized cost
ClosedClosed--loop systemloop system
# of y# of y
# of u# of u

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 17/23
2009/10 T1 MECH550F : Multivariable Feedback Control 17
Example: Info of DExample: Info of D--K iterationK iteration
ControllerController
Optimized costOptimized cost
μμ--boundsbounds
DD--scalingscaling
11stst iterationiteration
22ndnd iterationiteration

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 18/23
2009/10 T1 MECH550F : Multivariable Feedback Control 18
10-4
10-2
100
102
104
-50
-40
-30
-20
-10
0
10
20
M a g n i t u d e ( d B )
Bode Diagram
Frequency (rad/sec)
Example: Bode plotsExample: Bode plots
Samples of SSamples of S

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 19/23
2009/10 T1 MECH550F : Multivariable Feedback Control 19
10-4
10-2
100
102
104
-60
-50
-40
-30
-20
-10
0
10
M a g n i t u d e ( d B )
Bode Diagram
Frequency (rad/sec)
Example: Redesign with 2WpExample: Redesign with 2Wp
Samples of SSamples of S

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 20/23
2009/10 T1 MECH550F : Multivariable Feedback Control 20
10-4
10-2
100
102
104
-60
-50
-40
-30
-20
-10
0
10
M a g n i t u d e ( d B )
Bode Diagram
Frequency (rad/sec)
Example: Redesign with 3WpExample: Redesign with 3Wp
Samples of SSamples of S

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 21/23
2009/10 T1 MECH550F : Multivariable Feedback Control 21
SummarySummary
μ-synthesis for structured uncertainty
D-K iteration
If you want to design a controller by step-by-step
D-K iteration using dksyn.m, useoptions = dkitopt('AutoIter','off');
D-K iteration often generates very high-order
controllers. Apply model reduction to designedcontrollers if necessary.
Announcement: No lecture on November 5.
7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 22/23
2009/10 T1 MECH550F : Multivariable Feedback Control 22
Last homework (Due Nov 10, 5pm)Last homework (Due Nov 10, 5pm)
In Lecture 14, we assumed that we have two PIDIn Lecture 14, we assumed that we have two PID
controllers, and analyzed their robustness.controllers, and analyzed their robustness. In this homework, you are required to design a robustIn this homework, you are required to design a robust
controller.controller.
The design specifications are (cf. Lec.14, slide 19) The design specifications are (cf. Lec.14, slide 19) The worst case sensitivity gain should be at most 8dB. The worst case sensitivity gain should be at most 8dB.
The bandwidth (the frequency that |S| passes 0dB) should be as The bandwidth (the frequency that |S| passes 0dB) should be aslarge as possible.large as possible.
Verify that your controller satisfies the specs by samplingVerify that your controller satisfies the specs by samplinguncertain plant.uncertain plant.
Submit only (readable!) mSubmit only (readable!) m
--file.file.

7/16/2019 MECH550F_L15_MuSynthesis1
http://slidepdf.com/reader/full/mech550fl15musynthesis1 23/23
2009/10 T1 MECH550F : Multivariable Feedback Control 23
AppendixAppendix
In RP problem, what doesIn RP problem, what does
it mean if it mean if for allfor all ωω??
It meansIt means……..