matrici - ladispe.polito.it · matrici basilio bona dauin-politecnico di torino 2007 – 2008...
TRANSCRIPT

Matrici
Basilio Bona
DAUIN-Politecnico di Torino
2007 – 2008
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 1 / 70
Definizione
Definizione
La matrice e un insieme di N numeri reali o complessi organizzata in mrighe e n colonne, con m×n = N
A =
a11 a12 · · · a1n
a21 a22 · · · a2n
· · · · · · · · · · · ·am1 am2 · · · amn
≡
[aij
]i = 1, . . . ,m j = 1, . . . ,n
Una matrice viene sempre indicata con lettera maiuscola in grassetto, ades. A
Per indicarne le dimensioni si usa una delle seguenti notazioni
Am×n Am×n A ∈ Fm×n A ∈ Fm×n
dove F = R per elementi reali e F = C per elementi complessi
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 2 / 70
Matrice trasposta
Data una matrice Am×n si definisce matrice trasposta la matrice ottenutascambiando le righe con le colonne
ATn×m =
a11 a21 · · · am1
a12 a22 · · · am2...
.... . .
...a1n a2n · · · amn
Vale la proprieta che (AT)T = A
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 3 / 70

Matrice quadrata
Una matrice si dice quadrata se m = nUna matrice quadrata n×n si dice triangolare superiore se aij = 0 per i > j
An×n =
a11 a12 · · · a1n
0 a22 · · · a2n...
.... . .
...0 0 · · · ann
Se una matrice quadrata e triangolare superiore, la sua trasposta etriangolare inferiore e viceversa
ATn×n =
a11 0 · · · 0a12 a22 · · · 0...
.... . .
...a1n a2n · · · ann
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 4 / 70

Matrice simmetrica
Una matrice reale quadrata si dice simmetrica se A = AT, ossia
A−AT = O
In una matrice reale simmetrica vi sono al piun(n+1)
2elementi
indipendentiSe una matrice K ha elementi complessi kij = aij +jbij , (dove j =
√−1) si
indica con K la matrice coniugata, che ha elementi k ij = aij − jbij
Data una matrice complessa K, si definisce matrice aggiunta K∗ la matrice
trasposta coniugata, K∗ = KT
= KT
Una matrice complessa si dice autoaggiunta o hermitiana se K = K∗.Alcuni testi indicano questa matrice con K† oppure con KH
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 5 / 70
Matrice diagonale
Una matrice quadrata si dice diagonale se aij = 0 per i 6= j
An×n = diag(ai) =
a1 0 · · · 00 a2 · · · 0...
.... . .
...0 0 · · · an
Una matrice diagonale e sempre simmetrica
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 6 / 70
Matrice antisimmetrica
Matrice antisimmetrica
Una matrice quadrata A si dice antisimmetrica se
A+AT = 0 → A = −AT
Dati i vincoli imposti da questa relazione, la matrice antisimmetrica ha laseguente struttura
An×n =
0 a12 · · · a1n
−a12 0 · · · a2n...
.... . .
...−a1n −a2n · · · 0
In una matrice antisimmetrica vi sono al piun(n−1)
2elementi
indipendenti e non nulli. Vedremo in seguito alcune importanti proprietadelle matrici antisimmetriche 3×3.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 7 / 70
Matrice a blocchi
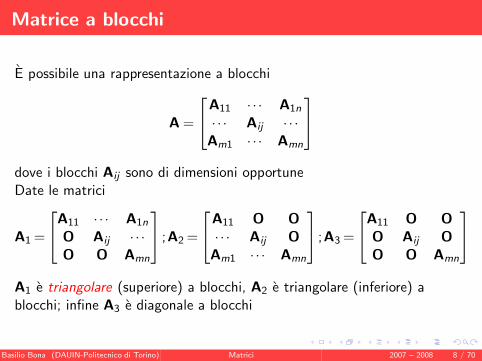
E possibile una rappresentazione a blocchi
A =
A11 · · · A1n
· · · Aij · · ·Am1 · · · Amn
dove i blocchi Aij sono di dimensioni opportuneDate le matrici
A1 =
A11 · · · A1n
O Aij · · ·O O Amn
;A2 =
A11 O O
· · · Aij O
Am1 · · · Amn
;A3 =
A11 O O
O Aij O
O O Amn
A1 e triangolare (superiore) a blocchi, A2 e triangolare (inferiore) ablocchi; infine A3 e diagonale a blocchi
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 8 / 70
Operazioni su matrici
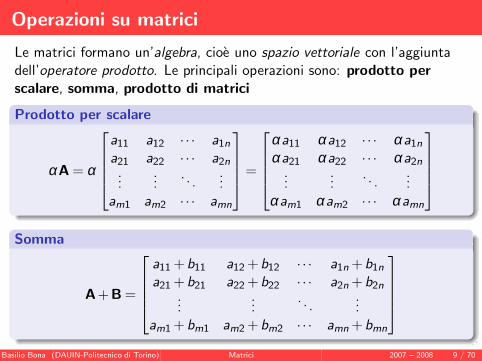
Le matrici formano un’algebra, cioe uno spazio vettoriale con l’aggiuntadell’operatore prodotto. Le principali operazioni sono: prodotto per
scalare, somma, prodotto di matrici
Prodotto per scalare
αA = α
a11 a12 · · · a1n
a21 a22 · · · a2n...
.... . .
...am1 am2 · · · amn
=
αa11 αa12 · · · αa1n
αa21 αa22 · · · αa2n...
.... . .
...αam1 αam2 · · · αamn
Somma
A+B =
a11 +b11 a12 +b12 · · · a1n +b1n
a21 +b21 a22 +b22 · · · a2n +b2n...
.... . .
...am1 +bm1 am2 +bm2 · · · amn +bmn
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 9 / 70
Somma
Proprieta della somma
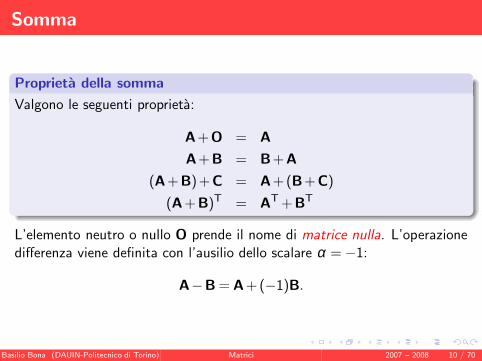
Valgono le seguenti proprieta:
A+O = A
A+B = B+A
(A+B)+C = A+(B+C)
(A+B)T = AT +BT
L’elemento neutro o nullo O prende il nome di matrice nulla. L’operazionedifferenza viene definita con l’ausilio dello scalare α = −1:
A−B = A+(−1)B.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 10 / 70
Prodotto
Prodotto di matrici
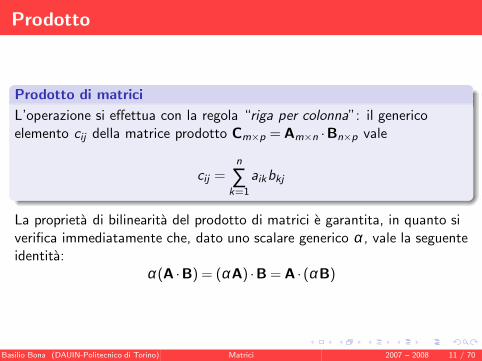
L’operazione si effettua con la regola “riga per colonna”: il genericoelemento cij della matrice prodotto Cm×p = Am×n ·Bn×p vale
cij =n
∑k=1
aikbkj
La proprieta di bilinearita del prodotto di matrici e garantita, in quanto siverifica immediatamente che, dato uno scalare generico α , vale la seguenteidentita:
α(A ·B) = (αA) ·B = A · (αB)
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 11 / 70
Prodotto
Proprieta del prodotto
A ·B ·C = (A ·B) ·C = A · (B ·C)A · (B+C) = A ·B+A ·C(A+B) ·C = A ·C+B ·C(A ·B)T = BT ·AT
In generale:
il prodotto di matrici non e commutativo: A ·B 6= B ·A, salvo in casiparticolari;
A ·B = A ·C non implica B = C, salvo in casi particolari;
A ·B = O non implica che sia A = O oppure B = O, salvo in casiparticolari.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 12 / 70
Matrice identita
Esiste un elemento neutro rispetto al prodotto, che prende il nome dimatrice identita e viene indicata con In oppure semplicemente I quandonon ci sono ambiguita sulla dimensione; data una matrice rettangolareAm×n si ha
Am×n = ImAm×n = Am×nIn
Matrice identita
I =
1 0 · · · 00 · · · · · · 0...
.... . .
...0 0 · · · 1
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 13 / 70
Matrice idempotente
Data una matrice quadrata A ∈ Rn×n, la potenza k-esima di matrice vale
Ak =k
∏ℓ=1
A
Una matrice si dice idempotente se
A2 = A.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 14 / 70
Traccia
Traccia
La traccia di una matrice quadrata An×n e la somma dei suoi elementidiagonali
tr (A) =n
∑k=1
akk
La traccia di una matrice soddisfa le seguenti proprieta
tr (αA+ βB) = α tr (A)+ β tr (B)tr (AB) = tr (BA)
tr (A) = tr (AT)
tr (A) = tr (T−1AT) per T non singolare (vedi oltre)
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 15 / 70
Minore
Si definisce minore di ordine p di una matrice Am×n il determinante Dp diuna sottomatrice quadrata ottenuta selezionando p righe e p colonnequalsiasi di Am×n
La definizione formale di determinante verra data tra pocoEsistono tanti minori quante sono le scelte possibili di p su m righe e p sun colonneSi definiscono minori principali di ordine k di una matrice Am×n ideterminanti Dk , con k = 1, · · · ,min{m,n}, ottenuti selezionando le primek righe e k colonne della matrice Am×n
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 16 / 70
Esempio
Sia data la matrice 3×3
A =
1 −3 57 2 4−1 3 2
Calcoliamo un generico minore D1, ad esempio quello ottenuto cancellandouna riga e una colonna, e – in particolare – la seconda riga e la terzacolonna. Quindi la matrice di cui dobbiamo calcolare i determinante risultala seguente
A23 =
[1 −3−1 3
]
da cui possiamo calcolare il determinante
D1 = det(A23) = 3×1− (−3×−1) = 0
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 17 / 70

Minore complementare - cofattore
Data la matrice A ∈ Rn×n, indichiamo con A(ij) ∈ R
(n−1)×(n−1) la matriceottenuta cancellando la i -esima riga e la j-esima colonna di A.Si definisce minore complementare Drc di un generico elemento arc di unamatrice quadrata An×n il determinante della matrice ottenuta cancellandola r -esima riga e la c-esima colonna, ossia detA(rc)
Drc = detA(rc).
Si definisce complemento algebrico o cofattore (in inglese cofactor) di unelemento arc di una matrice quadrata An×n il prodotto
Arc = (−1)r+cDrc
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 18 / 70
Determinante
Una volta definito il cofattore si puo finalmente definire il determinante diA
Fissata una qualsiasi riga i , si ha la definizione “per riga”:
det(A) =n
∑k=1
aik(−1)i+k det(A(ik)) =n
∑k=1
aikAik
oppure, fissata una qualsiasi colonna j , si ha la definizione “per colonna”:
det(A) =n
∑k=1
akj(−1)k+j det(A(kj)) =n
∑k=1
akjAkj
Poiche queste definizioni sono ricorsive e coinvolgono i determinanti diminori via via sempre piu piccoli, occorre definire il determinante dellamatrice 1×1, che vale semplicemente det(aij) = aij .
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 19 / 70

Proprieta del determinante
Il determinante ha le seguenti proprieta:
det(A ·B) = det(A)det(B)
det(AT) = det(A)
det(kA) = kn det(A)
se si effettua un numero s di scambi tra righe o tra colonne dellamatrice A ottenendo la matrice As , si ha det(As) = (−1)s det(A)
se la matrice A ha due righe o due colonne uguali o proporzionali, siha det(A) = 0
se la matrice A ha una riga o una colonna ottenibile da unacombinazione lineare di altre righe o colonne, si ha det(A) = 0
se la matrice A e triangolare superiore o inferiore, si hadet(A) = ∏n
i=1 aii
se la matrice A e triangolare a blocchi, con p blocchi Aii sulladiagonale, si ha det(A) = ∏p
i=1detAii
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 20 / 70
Matrice singolare e rango
Una matrice A si dice singolare se det(A) = 0.Si definisce rango (o caratteristica) della matrice Am×n il numeroρ(Am×n) definito come il massimo intero p per cui esiste almeno unminore Dp non nulloValgono le seguenti proprieta:
ρ(A) ≤ min{m,n}se ρ(A) = min{m,n}, la matrice A si dice a rango pieno
se ρ(A) < min{m,n}, la matrice non ha rango pieno e si dice checade di rango
ρ(A ·B) ≤ min{ρ(A),ρ(B)}ρ(A) = ρ(AT)
ρ(A ·AT) = ρ(AT ·A) = ρ(A)
se An×n e detA < n la matrice non ha rango pieno
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 21 / 70
Matrice invertibile
Data una matrice quadrata A ∈ Rn×n si dice invertibile o non singolare se
esiste la matrice inversa A−1n×n tale che
AA−1 = A−1A = In
La matrice e invertibile se e solo se ρ(A) = n, ossia e di rango pieno; cioequivale ad avere det(A) 6= 0.L’inversa si ottiene come:
A−1 =1
det(A)Adj(A)
Valgono le seguenti proprieta: (A−1)−1 = A; (AT)−1 = (A−1)T.La matrice inversa, quando esiste, permette risolvere l’equazione matricialeseguente
y = Ax
in funzione dell’incognita x, come
x = A−1y.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 22 / 70
Matrice ortonormale
Si definisce matrice ortonormale la matrice quadrata per cui A−1 = AT.Per queste matrici vale quindi l’identita
ATA = AAT = I
Date due matrici quadrate di pari dimensioni A e B, vale la seguenteidentita
(AB)−1 = B−1A−1
Esiste un importante risultato, chiamato Lemma d’inversione, chestabilisce quanto segue: se A e C sono matrici quadrate invertibili e B e D
sono matrici di dimensioni opportune, allora
(A+BCD)−1 = A−1−A−1B(DA−1B+C−1)−1DA−1
La matrice (DA−1B+C−1) deve essere anch’essa invertibile. Il lemma diinversione e utile per calcolare l’inversa di una somma di matrici A1 +A2,quando A2 e decomponibile nel prodotto BCD, in cui la matrice C efacilmente invertibile, ad esempio diagonale o triangolare.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 23 / 70

Derivata di matrice
Se la matrice quadrata A(t) e composta da elementi aij(t) tutti derivabilinel tempo t, allora la derivata della matrice vale
ddt
A(t) = A(t) =
[ddt
aij(t)
]
= [aij(t)]
Se la matrice quadrata A(t) ha rango ρ(A(t)) = n per ogni valore deltempo t, allora la derivata della sua inversa vale
ddt
A(t)−1 = −A−1(t)A(t)A(t)−1
Ricordiamo che, poiche l’inversione di matrice non e un operatore lineare,risulta in generale
[dA(t)
dt
]−1
6= ddt
[A(t)−1
]
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 24 / 70
Decomposizione in simmetrica e antisimmetrica
Data una matrice reale di dimensioni qualsiasi A ∈ Rm×n, risultano
simmetriche entrambe le matrici seguenti
ATA ∈ Rn×n
AAT ∈ Rm×m
Data una matrice quadrata A, e sempre possibile decomporla in unasomma di due matrici, come segue:
A = As +Aa
dove
As =1
2(A+AT) matrice simmetrica
Aa =1
2(A−AT) matrice antisimmetrica
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 25 / 70
Trasformazione di similarita
Trasformazioni di similarita
Data una matrice quadrata A ∈ Rn×n e una matrice quadrata non
singolare T ∈ Rn×n, la matrice B ∈ R
n×n ottenuta come
B = T−1AT oppure B = TAT−1
si dice similare ad A e la trasformazione T si dice di similarita.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 26 / 70
Autovalori e autovettori
Se si trova una matrice U per cui la matrice A sia similare alla matricediagonale Λ = diag(λi)
A = UΛU−1
postmoltiplicando per U si puo scrivere
AU = UΛ
e se indichiamo con ui la i -esima colonna di U, ossia
U =[u1 u2 · · · un
]
avremoAui = λiui
Questa relazione e la ben nota formula che lega autovalori e autovettori;quindi possiamo dire che le costanti λi sono gli autovalori di A e i vettoriui sono gli autovettori di A, in generale non normalizzati.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 27 / 70
Autovalori e autovettori
Data una matrice quadrata An×n, si chiamano autovalori della matrice (ininglese eigenvalues) le soluzioni λi (reali o complesse) dell’equazionecaratteristica
det(λ I−A) = 0
det(λ I−A) e un polinomio in λ , detto polinomio caratteristico.Se gli autovalori sono tutti distinti, si chiamano autovettori (in ingleseeigenvectors) i vettori ui che soddisfano l’identita
Aui = λiui
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 28 / 70
Autovettori generalizzati
Se gli autovalori non sono tutti distinti, si ottengono autovettorigeneralizzati, la cui determinazione va oltre gli scopi di questi appunti.Da un punto di vista geometrico, gli autovettori rappresentano quelleparticolari “direzioni” nello spazio R
n (dominio della trasformazione linearerappresentata da A), che si trasformano in se stesse; sono quindi ledirezioni invarianti rispetto alla trasformazione A, mentre gli autovaloriforniscono le rispettive costanti di “scalamento” lungo queste direzioni.L’insieme degli autovalori di una matrice A sara indicato con Λ(A) oppurecon {λi (A)}; l’insieme degli autovettori di A sara indicato con {ui(A)}. Ingenerale, poiche gli autovettori sono rappresentazioni di direzioni invariantirispetto alla trasformazione data, essi sono definiti a meno di unacostante, ossia possono o meno essere normalizzati; tuttavia e convenzionetacita che essi abbiano norma unitaria, salvo quando altrimenti dichiarato.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 29 / 70
Autovalori
Proprieta degli autovaloriData una matrice A e i suoi autovalori {λi (A)}, vale
{λi (A+ cI)} = {(λi (A)+ c)}
Data una matrice A e i suoi autovalori {λi (A)}, vale
{λi (cA)} = {(cλi (A)}
Data una matrice triangolare (superiore o inferiore)
a11 a12 · · · a1n
0 a22 · · · a2n...
.... . .
...0 0 · · · ann
,
a11 0 · · · 0a21 a22 · · · 0...
.... . .
...an1 an2 · · · ann
i suoi autovalori sono gli elementi sulla diagonale {λi (A)} = {aii}; lostesso vale per una matrice diagonale.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 30 / 70
Invarianza degli autovalori
Data una matrice An×n e i suoi autovalori {λi (A)}, vale
det(A) =n
∏i=1
λi
e
tr (A) =n
∑i=1
λi
Data una qualunque trasformazione invertibile, rappresentata dalla matriceT, gli autovalori di A sono invarianti alle trasformazioni di similarita
B = T−1AT
ossia{λi(B)} = {λi (A)}
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 31 / 70
Matrice modale
Se costruiamo una matrice M ordinando per colonne gli autovettorinormalizzati ui(A)
M =[u1 · · · un
]
allora la trasformazione di similarita rispetto a M fornisce una matricediagonale
Λ =
λ1 0 · · · 00 λ2 · · · 0...
.... . .
...0 0 · · · λn
= M−1AM
La matrice M prende il nome di matrice modale.Se la matrice A e simmetrica, i suoi autovalori sono tutti reali e si hal’identita
Λ = MTAM
In questo caso la matrice M e ortonormale.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 32 / 70
Decomposizione ai valori singolari
Data una matrice A ∈ Rm×n qualsiasi, di rango r = ρ(A) ≤ s con
s = min{m,n}, essa si puo fattorizzare secondo la
Decomposizione ai Valori Singolari(Singular value decomposition)
nel modo seguente:
A = UΣVT =s
∑i=1
σiuivTi (1)
elementi caratterizzanti della decomposizione sono:
σi
ui
vi
come vedremo ora
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 33 / 70
Decomposizione ai valori singolari
σi(A) ≥ 0 sono detti valori singolari e coincidono con le radiciquadrate non negative degli autovalori della matrice simmetrica ATA:
{σi(A)} = {√
λi(ATA)} σi ≥ 0
ordinati in ordine decrescente
σ1 ≥ σ2 ≥ ·· · ≥ σs ≥ 0
se r < s vi sono r valori singolari positivi; i restanti sono nulli
σ1 ≥ σ2 ≥ ·· · ≥ σr > 0; σr+1 = · · · = σs = 0
U e una matrice (m×m) ortonormale
U =[u1 u2 · · · um
]
contenente per colonne gli autovettori ui della matrice AAT
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 34 / 70
Decomposizione ai valori singolari
V e una matrice (n×n) ortonormale
V =[v1 v2 · · · vn
]
contenente per colonne gli autovettori vi della matrice ATA
Σ e una matrice (m×n) con la seguente struttura
se m < n Σ =[Σs O
]
se m = n Σ = Σs
se m > n Σ =
[Σs
O
]
.
La matrice Σs = diag(σi ) e diagonale di dimensioni s × s e contienesulla diagonale i valori singolari:
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 35 / 70

Decomposizione ai valori singolari
Alternativamente, possiamo decomporre la matrice A nel modo seguente,che e del tutto analogo a quello descritto in (1), ma mette in evidenza isoli valori singolari positivi:
A =[P P
]
︸ ︷︷ ︸
U
[Σr O
O O
]
︸ ︷︷ ︸
Σ
[
QT
QT
]
︸ ︷︷ ︸
VT
= PΣrQT (2)
dove
P e una matrice ortonormale m× r , P e una matrice ortonormalem× (m− r);
Q e una matrice ortonormale n× r , QT
e una matrice ortonormalen× (n− r);
Σr e una matrice diagonale r × r che contiene sulla diagonale i valorisingolari positivi σi , i = 1, · · · , r .
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 36 / 70
Decomposizione ai valori singolari e rango
Il rango r della matrice A e pari al numero r ≤ s di valori singolari nonnulli.Data una matrice A ∈ R
m×n qualsiasi, le due matrici ATA e AAT sonosimmetriche, hanno gli stessi valori singolari positivi e differiscono soltantoper il numero di valori singolari nulli.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 37 / 70
Matrici come rappresentazione di operatori lineari
Dati due spazi vettoriali X ⊆ Rn e Y ⊆ R
m, aventi rispettivamentedimensioni n e m, e dati due generici vettori x ∈ X e y ∈ Y , la piugenerica trasformazione lineare tra gli spazi si puo rappresentare attraversol’operatore matriciale A ∈ R
m×n, come segue:
y = Ax; x ∈ Rn; y ∈ R
m.
Quindi una matrice puo essere sempre interpretata come un operatore cheprende un vettore dello spazio di “partenza” X e lo trasforma in unvettore dello spazio di “arrivo” Y .Percio qualunque trasformazione lineare ha (almeno) una matrice che larappresenta e, di converso, qualunque matrice e la rappresentazione di unaqualche trasformazione lineare.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 38 / 70
Spazio immagine e spazio nullo
Si definisce spazio immagine (in inglese range) della trasformazione A ilsottospazio di Y definito dalla seguente proprieta:
R(A) = {y | y = Ax, x ∈ X }; R(A) ⊆ Y
Si definisce spazio nullo (in inglese kernel o null-space) dellatrasformazione A il sottospazio di X definito dalla seguente proprieta:
N (A) = {x | 0 = Ax, x ∈ X }; N (A) ⊆ X
Lo spazio nullo rappresenta percio tutti quei vettori di X che vengonotrasformati nel vettore nullo (l’origine) di Y .Le dimensioni dello spazio immagine e dello spazio nullo si chiamano,rispettivamente, rango ρ(A) (che abbiamo gia definito precedentemente enullita ν(A):
ρ(A) = dim(R(A)); ν(A) = dim(N (A)).
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 39 / 70
Relazioni tra spazio immagine e spazio nullo
Se X e Y hanno dimensioni finite, e questo e il nostro caso in quantoX ⊆ R
n e Y ⊂ Rm, allora valgono le seguenti relazioni:
N (A) = R(AT)⊥
R(A) = N (AT)⊥
N (A)⊥ = R(AT)
R(A)⊥ = N (AT)
dove il simbolo ⊥ indica il complemento ortogonale al (sotto-)spaziocorrispondente. Ricordiamo che {0}⊥ = R.Vale anche la seguente decomposizione ortogonale degli spazi X e Y
X = N (A)⊕N (A)⊥ = N (A)⊕R(AT)
Y = R(A)⊕R(A)⊥ = R(A)⊕N (AT)
dove il simbolo ⊕ indica la somma diretta tra due sottospazi.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 40 / 70

Inversa generalizzata
Data una matrice reale qualsiasi A ∈ Rm×n, con m 6= n, la matrice inversa
non risulta definita. Tuttavia, e possibile definire una classe di matrici,dette pseudo-inverse, inverse generalizzate o 1-inverse A−, che soddisfanola seguente relazione:
AA−A = A
Se la matrice A ha rango pieno, ossia ρ(A) = min{m,n}, e possibiledefinire due classi di matrici inverse generalizzate particolari
se m < n (ossia ρ(A) = m), l’inversa destra di A e quella matriceAd ∈ R
n×m per cuiAAd = Im×m
se n < m (ossia ρ(A) = n), l’inversa sinistra di A e quella matriceAs ∈ R
n×m per cuiAsA = In×n
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 41 / 70

Matrici pseudo-inverse
Tra le molte inverse destre e sinistre concepibili, due sono particolarmenteimportanti:
pseudo-inversa destra (m < n):
A+d = AT(AAT)−1
rappresenta una particolare inversa destra. Si puo dimostrare chequando ρ(A) = m allora (AAT)−1 esiste.
pseudo-inversa sinistra (n < m):
A+s = (ATA)−1AT
rappresenta una particolare inversa sinistra.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 42 / 70
Pseudo-inversa di Moore-Penrose
Si puo dimostrare che quando ρ(A) = n allora (ATA)−1 esiste.Questa particolare pseudo-inversa sinistra
(ATA)−1AT
prende anche il nome di pseudo-inversa di Moore-Penrose.In generale, anche se ATA non e invertibile, si puo sempre definire unapseudo-inversa di Moore-Penrose A+ che soddisfa le seguenti relazioni:
AA+A = A
A+AA+ = A+
(AA+)T = AA+
(A+A)T = A+A
(3)
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 43 / 70

Pseudo-inversa destra e sinistra
Le due pseudo-inverse A+d
e A+s coincidono con la matrice inversa
tradizionale A−1 quando A e quadrata e ha rango pieno:
A−1 = A+d
= A+s = A+
La trasformazione lineare associata alla matrice A ∈ Rm×n
y = Ax, (4)
con x ∈ Rn e y ∈ R
m, e equivalente ad un sistema di m equazioni lineari inn incognite, i cui coefficienti sono dati dagli elementi di A; questo sistemalineare puo non ammettere soluzioni, ammetterne una sola o ammetterneun numero infinito.Se vogliamo utilizzare le pseudo-inverse per risolvere il sistema lineare in(4), dobbiamo distinguere due casi, sempre nell’ipotesi che il rango di A
sia pieno:
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 44 / 70
Soluzione di sistemi lineari - 1
Caso m < n: abbiamo piu incognite che equazioni; tra le infinite soluzionipossibili x ∈ R
n, scegliamo quella che ha norma ‖x‖ minima, individuata da
x = A+d y = AT(AAT)−1y
Tutte le altre possibili soluzioni di y = Ax si ottengono come
x = x+v = A+d y+v
dove v ∈ N (A) e un vettore appartenente allo spazio nullo di A, che hadimensioni n−m. Queste possibili soluzioni si possono anche esprimere inuna forma alternativa
x = A+d y+(I−A+
d A)w (5)
dove w ∈ Rn e un vettore n×1 qualsiasi. La matrice I−A+
d A proietta w
nello spazio nullo di A, trasformando w in v ∈ N (A); essa prende il nomedi matrice di proiezione.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 45 / 70
Soluzione di sistemi lineari - 2
caso n < m: abbiamo piu equazioni che incognite; allora non esistonosoluzioni esatte alla y = Ax, ma solo soluzioni approssimate, con un erroree = y−Ax 6= 0. Tra queste possibili soluzioni approssimate si sceglieconvenzionalmente quella che minimizza la norma dell’errore, ossia
x = arg minx∈Rn
‖y−Ax‖
La soluzione risulta essere
x = A+s y = (ATA)−1ATy
e geometricamente consiste nella proiezione ortogonale di y sulcomplemento ortogonale di N (A), ovvero sul sottospazioN (A)⊥ = R(AT).L’errore di approssimazione, detto anche errore di proiezione, vale
e = (I−AA+s )y (6)
e la sua norma e minima, come detto sopra.Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 46 / 70
Soluzione di sistemi lineari - 3
La somiglianza tra la matrice di proiezione I−A+d A in (5) e la matrice che
fornisce l’errore di proiezione I−AA+s in (6) non e casuale e verra
approfondita quando tratteremo le matrici di proiezione.Per calcolare le inverse generalizzate, si puo utilizzare la decomposizione aivalori singolari che abbiamo introdotto sopra.In particolare, ricordando la (2), la pseudo-inversa vale
A+ = V
[Σ−1
r O
O O
]
UT = QΣ−1r PT.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 47 / 70
Proiezioni e matrici di proiezione
Il concetto geometrico di proiezione di un segmento su un piano puovenire esteso e generalizzato agli elementi di uno spazio vettoriale. Taleconcetto e utile a risolvere un gran numero di problemi, tra cui i problemidi approssimazione, di stima, di predizione e di filtraggio di segnali.Dato uno spazio vettoriale reale V(Rn) di dimensioni n, dotato di prodottoscalare, ed un suo sottospazio W(Rk) di dimensioni k ≤ n, e possibiledefinire l’operatore proiezione dei vettori v ∈ V sul sottospazio W.L’operatore proiezione e definito dalla matrice quadrata di proiezioneP ∈ R
n×n, le cui colonne sono le proiezioni degli elementi della base di V
in W. Una matrice e di proiezione se e solo se P2 = P ossia se essa eidempotente.La proiezione puo essere ortogonale, oppure non ortogonale; nel primocaso la matrice P e simmetrica, nel secondo caso no. Se P e una matricedi proiezione, anche I−P lo e.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 48 / 70
Matrici di proiezione
Classici esempi di matrici di proiezione ortogonale sono le matrici associatealla pseudo-inversa sinistra
P1 = AA+s e P2 = I−AA+
s
e alla pseudo-inversa destra
P3 = A+dA e P4 = I−A+
dA
(vedi le slide sulle inverse generalizzate).Dal punto di vista geometrico, P1 proietta ogni vettore v ∈ V nel spazioimmagine R(A), mentre P2 proietta v nel suo complemento ortogonaleR(A)⊥ = N (AT).
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 49 / 70
Norma di matrice - 1
Analogamente a quanto avviene per un vettore, e possibile fornire una“misura” della matrice ossia indicarne la “grandezza”, definendo la normadella matrice.Poiche una matrice rappresenta una trasformazione lineare tra vettori, lanorma misura quando grande sia questa trasformazione, ma deve inqualche modo “normalizzare” il risultato perche questo non sia influenzatodalla “grandezza” del vettore che viene trasformato; cio viene fattodefinendo la norma nel modo seguente:
‖A‖ := sup‖x‖
‖Ax‖‖x‖ = sup
‖x‖=1‖Ax‖ .
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 50 / 70
Norma di matrice - 2
Data una matrice quadrata A ∈ Rn×n, la sua norma deve soddisfare i
seguenti assiomi generali (detti assiomi della norma):
1 ‖A‖ > 0 per ogni A 6= O, ‖A‖ = 0 se e solo se A = O;
2 ‖A+B‖ ≤ ‖A‖+‖B‖ (diseguaglianza triangolare);
3 ‖αA‖ = |α |‖A‖ per ogni scalare α e ogni A;
4 ‖AB‖ ≤ ‖A‖‖B‖.Data A ∈ R
n×n e i suoi autovalori {λi (A)}, vale la seguente diseguaglianza
1∥∥A−1
∥∥≤ |λi | ≤ ‖A‖ ∀i = 1, . . . ,n
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 51 / 70
Norme di matrice - 1
Elenchiamo le norme di matrice piu comunemente adottate, considerandosolo matrici reali.
Norma spettrale:
‖A‖2 =
√
maxi
{λi (ATA)}
Norma di Frobenius:
‖A‖F =√
∑i
∑j
a2ij =
√
trATA
Massimo valore singolare:
‖A‖σ =√
maxi
{σi (A)}
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 52 / 70
Norme di matrice - 2
Norma 1 o max-norma:
‖A‖1 = maxj
n
∑i=1
|aij |
Norma ∞:
‖A‖∞ = maxi
n
∑j=1
|aij |
In generale ‖A‖2 = ‖A‖σ e ‖A‖22 ≤ ‖A‖1 ‖A‖∞
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 53 / 70
Matrici antisimmetriche - 1
Le matrici antisimmetriche sono utili nello studio della cinematica delcorpo rigido, oltre che per definire il prodotto esterno in uno spaziotridimensionale, come abbiamo visto precedentemente.Una matrice S si dice antisimmetrica quando soddisfa la seguenteproprieta:
S+ST = O ossia S = −ST (7)
Una matrice antisimmetrica ha percio sulla diagonale principale elementitutti nulli, mentre gli elementi fuori dalla diagonale soddisfano la relazionesij = −sji , come nel seguente esempio di matrice 4×4
S =
0 1 −3 −1−1 0 4 53 −4 0 −81 −5 8 0
Ne segue che una matrice antisimmetrica e definita da solin(n−1)
2elementi.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 54 / 70

Matrici antisimmetriche - 2
Per n = 3 risultan(n−1)
2= 3, per cui la matrice antisimmetrica ha tanti
elementi indipendenti quante sono le componenti di un generico vettoretridimensionale v; la matrice viene allora ad essere in relazione biunivocacon un vettore ed e indicata come S(v).Nel seguito studieremo le proprieta delle matrici antisimmetriche pern = 3, in quanto sono di fondamentale importanza per definire lacinematica delle rotazioni di corpi rigidi in spazi tridimensionali.
Se v =[v1 v2 v3
]Te un vettore qualsiasi, possiamo definire S(v) come
l’operatore che trasforma v in una matrice antisimmetrica:
S(v) =
0 −v3 v2
v3 0 −v1
−v2 v1 0
(8)
e viceversa, data una matrice antisimmetrica qualsiasi, e sempre possibileestrarre da essa un vettore v.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 55 / 70

Matrici antisimmetriche - 3
La matrice S(v) si indica semplicemente con S quando non si vuoleevidenziare la dipendenza dal vettore v. La proprieta di antisimmetriacomporta la seguente identita:
ST(v) = −S(v) = S(−v) (9)
Le matrici antisimmetriche soddisfano la proprieta di linearita; dati duescalari λi ∈ R, vale la proprieta
S(λ1u+ λ2v) = λ1S(u)+ λ2S(v) (10)
Inoltre, dati due vettori qualsiasi v e u, si ha la seguente importanteproprieta:
S(u)v = u×v = −v×u = S(−v)u = ST(v)u (11)
e quindi S(u) puo essere interpretata come l’operatore (u×) e viceversa.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 56 / 70
Matrici antisimmetriche - 4
Da questa proprieta e dalla anti-commutativita del prodotto esterno segueche
S(u)v = ST(v)u (12)
Infatti
S(u)v = u×v = −v×u = S(−v)u = −S(v)u = ST(v)u
E semplice verificare che la matrice S(u)S(u) = S2(u) e simmetrica everifica la relazione
S2(u) = uuT−‖u‖2I (13)
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 57 / 70
Autovalori e autovettori di matrici antisimmetriche
Data la matrice antisimmetrica S(v) i suoi autovalori sono immaginari onulli:
λ1 = 0, λ2,3 = ±j‖v‖L’autovettore relativo all’autovalore λ1 = 0 vale v; gli altri due sonocomplessi coniugati.L’insieme delle matrici antisimmetriche forma uno spazio vettoriale.Inoltre, date due matrici antisimmetriche S1 e S2, si definiscecommutatore l’operatore seguente
[S1,S2] := S1S2 −S2S1
che risulta anch’esso antisimmetrico
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 58 / 70
Matrici ortogonali
Viene chiamata ortogonale una generica matrice quadrata U ∈ Rn per cui
vale la seguente proprieta
UTU =
α1 0 · · · 00 α2 · · · 0...
.... . .
...0 0 · · · αn
con αii 6= 0.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 59 / 70
Matrici ortonormali - 1
Una generica matrice quadrata U ∈ Rn e detta invece ortonormale quando
le costanti αii sono tutte unitarie. In questo caso valgono le seguentiproprieta:
l’inversa di U coincide con la trasposta
UUT = UTU = I (14)
ovveroU−1 = UT (15)
Le colonne di U sono tra loro ortogonali e a norma unitaria, comepure le righe.
‖U‖ = 1;
Il determinante di U ha modulo unitario:
|det(U)| = 1 (16)
percio esso puo valere +1 oppure −1.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 60 / 70
Matrici ortonormali - 2
Il prodotto scalare e invariante a trasformazioni ortonormali, ossia
(Ux) · (Uy) = (Ux)T(Uy) = xTUTUy = xTIy = xTy = x ·y (17)
Se U e una matrice ortonormale,1 di dimensioni opportune, allora‖AU‖ = ‖UA‖ = ‖A‖.Limitandoci al caso di matrici U3×3, solo 3 dei 9 elementi checompongono la matrice sono indipendenti, in quanto le condizioni diortonormalita tra le righe o tra le colonne definiscono 6 vincoli.
1La regola vale anche nel caso piu generale in cui U sia una matrice unitaria, definita
da U∗U = I.Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 61 / 70
Matrici ortonormali - 3
Le matrici ortonormali U3×3 sono la rappresentazione di una particolareclasse di trasformazioni geometriche applicabili a corpi rigidi nello spazioEuclideo; infatti la relazione (17) assicura che il prodotto scalare tra duegenerici vettori si conservi anche tra i rispettivi vettori trasformati.Tuttavia occorre distinguere tra le trasformazioni per cui detU = +1, daquelle per cui detU = −1.Quando det(U) = +1, la matrice U rappresenta una rotazione propria,fisicamente ammissibile e realizzabile, mentre quando det(U) = −1, U
rappresenta una roto-riflessione ovvero una rotazione impropria, che non efisicamente realizzabile su corpi rigidi.Inoltre esiste un’importante differenza tra le rotazioni e le roto-riflessioni:le prime formano un gruppo commutativo continuo; intuitivamente questoequivale a dire che esiste una rotazione infinitesima. Le seconde invecenon formano un gruppo continuo; le riflessioni non possiedono la “qualita”di poter essere infinitesime.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 62 / 70
Matrici ortonormali - 4
Se U e una matrice ortonormale, vale la proprieta distributiva2 rispetto alprodotto esterno:
U(x×y) = (Ux)× (Uy) (18)
Per ogni matrice di rotazione propria U e ogni vettore x si dimostra che
US(x)UTy = U(
x× (UTy))
= (Ux)× (UUTy)
= (Ux)×y = S(Ux)y(19)
dove S(x) e la matrice antisimmetrica associata a x; si ricavano pertantole relazioni seguenti:
US(x)UT = S(Ux)US(x) = S(Ux)U
(20)
che saranno utilizzate nello studio delle matrici d’inerzia.
2 Questa proprieta non e generalmente vera, salvo appunto quando U e ortonormale.Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 63 / 70
Forme bilineari e forme quadratiche
Si definisce forma bilineare associata alla matrice A ∈ Rm×n la variabile
scalareb(x,y) := xTAy = yTATx
Si definisce forma quadratica associata alla matrice quadrata A ∈ Rn×n la
variabile scalareq(x) := xTAx = xTATx
Qualsiasi forma quadratica associata ad una matrice antisimmetrica S(y) eidenticamente nulla, ossia
xTS(y)x ≡ 0 ∀x (21)
La dimostrazione di questa proprieta e semplice: definendow = S(y)x = y×x, avremo xTS(y)x = xTw, ma essendo per definizione w
ortogonale sia a y sia a x, il prodotto scalare xTw sara sempre nullo, equindi pure la forma quadratica al primo termine della (21).
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 64 / 70
Matrici definite positive - 1
Ricordando la decomposizione di una generica matrice A in una partesimmetrica As e in una antisimmetrica Aa, si conclude che la formaquadratica dipende solo dalla parte simmetrica della matrice:
q(x) = xTAx = xT(As +Aa)x = xTAsx
Una matrice quadrata A si dice definita positiva se la forma quadraticaassociata xTAx soddisfa le condizioni
xTAx > 0 ∀x 6= 0
xTAx = 0 x = 0
Una matrice quadrata A si dice semidefinita positiva se la formaquadratica associata xTAx soddisfa la condizione
xTAx≥ 0 ∀x
Una matrice quadrata A si dice definita negativa se −A e definita positiva;analogamente una matrice quadrata A si dice semidefinita negativa se −A
e semidefinita positiva.Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 65 / 70
Matrici definite positive - 2
Spesso, per indicare queste matrici si usano le notazioni seguenti:
matrice definita positiva: A ≻ 0matrice semidefinita positiva: A � 0matrice definita negativa: A ≺ 0matrice semidefinita negativa: A � 0
Condizione necessaria, ma non sufficiente, affinche una matrice quadrataA sia definita positiva e che gli elementi sulla diagonale siano strettamentepositivi.Condizione necessaria e sufficiente affinche una matrice quadrata A siadefinita positiva e che tutti gli autovalori siano strettamente positivi.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 66 / 70
Criterio di Sylvester
Il criterio di Sylvester afferma che condizione necessaria e sufficienteaffinche la matrice quadrata A sia definita positiva e che tutti i suoi minoriprincipali siano strettamente positivi.Una matrice definita positiva ha rango pieno ed e sempre invertibile.Inoltre la forma quadratica xTAx soddisfa la relazione seguente
λmin(A)‖x‖2 ≤ xTAx≤ λmax(A)‖x‖2
dove λmin(A) e λmax(A) sono, rispettivamente, l’autovalore minimo emassimo di A.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 67 / 70
Matrice semidefinita e rango
Una matrice An×n semidefinita positiva ha rango ρ(A) = r < n, ovveropossiede r autovalori strettamente positivi e n− r autovalori nulli.La forma quadratica si annulla per ogni x ∈ N (A).Data una matrice reale di dimensioni qualsiasi Am×n, abbiamo visto chesia ATA, sia AAT sono simmetriche; inoltre sappiamo cheρ(ATA) = ρ(AAT) = ρ(A).Si puo dimostrare che esse hanno sempre autovalori reali non negativi, equindi sono definite o semi-definite positive: in particolare, se la matriceAm×n ha rango pieno,
se m < n, ATA � 0 e AAT ≻ 0,
se m = n, ATA ≻ 0 e AAT ≻ 0,
se m > n, ATA ≻ 0 e AAT � 0.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 68 / 70
Gradiente
Data la forma bilineare b(x,y) = xTAy, si definiscono gradienti le seguentiespressioni:
gradiente rispetto a x: gradxb(x,y) :=
(∂b(x,y)
∂x
)T
= Ay
gradiente rispetto a y: gradyb(x,y) :=
(∂b(x,y)
∂y
)T
= ATx
Data la forma quadratica q(x) = xTAx, si definisce gradiente rispetto a x
la seguente espressione:
gradxq(x) :=
(∂q(x)
∂x
)T
= 2Ax.
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 69 / 70

Derivata di matrice
Se la matrice A ha elementi funzione di una variabile x , si puo definire laderivata di matrice rispetto a x
ddx
A(x) =
[daij
dx
]
Se la variabile x e il tempo t, si scrive
ddt
A(t) ≡ A(t) =
[
daij(t)
dt
]
≡[aij
]
Se la matrice A e funzione del tempo attraverso la variabile x(t), allora
ddt
A(x(t)) ≡ A(x(t)) =
[
∂aij(x)
∂x
dx(t)
dt
]
≡[
∂aij(x)
∂x
]
x(t)
Basilio Bona (DAUIN-Politecnico di Torino) Matrici 2007 – 2008 70 / 70