mathematik vorkurs - haw-hamburg.de · teilbarkeitsregeln: eine zahl ist genau dann durch • 2...
TRANSCRIPT

hochschule für angewandte wissenschaften
FACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Mathematik Vorkurs
G. Finsel
S. Heitmann
K. Ronneberger
2. Auflage 2004
Inhaltsverzeichnis
1 Zahlensysteme 4
1.1 Natürliche und ganze Zahlen. . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Rationale Zahlen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.1 Teilbarkeitsregel. . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.2 Die vier Grundrechenarten. . . . . . . . . . . . . . . . . . . . . 6
1.2.3 Das Rechnen mit Brüchen. . . . . . . . . . . . . . . . . . . . . 8
1.3 Reelle Zahlen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.1 Potenzen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.2 Binomische Formeln. . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.3 Wurzeln. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3.4 Irrationale Zahlen. . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.3.5 Logarithmen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.4 Komplexe Zahlen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2 Funktionen 21
2.1 Der Begriff der Funktion. . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2 Darstellung von Funktionen. . . . . . . . . . . . . . . . . . . . . . . . 21
2.2.1 Analytische Darstellung. . . . . . . . . . . . . . . . . . . . . . 21
2.2.2 Darstellung durch Wertetabellen. . . . . . . . . . . . . . . . . . 22
2.2.3 Graphische Darstellung. . . . . . . . . . . . . . . . . . . . . . . 22
2.2.4 Parameterdarstellung. . . . . . . . . . . . . . . . . . . . . . . . 23
2.3 Eigenschaften von Funktionen. . . . . . . . . . . . . . . . . . . . . . . 24
2.3.1 Monotonie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3.2 Gerade/ungerade Funktionen. . . . . . . . . . . . . . . . . . . . 24
2.3.3 Beschränktheit. . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.4 Injektive, surjektive und bijektive Funktionen. . . . . . . . . . . 26
2.4 Umkehrfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.4.1 Rechnerische Bestimmung der Umkehrfunktion. . . . . . . . . . 28
2.4.2 Graph von Funktion und Umkehrfunktion. . . . . . . . . . . . . 29
2

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
2.5 Rationale Funktionen. . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.5.1 Lineare Funktionen. . . . . . . . . . . . . . . . . . . . . . . . . 30
2.5.2 Lösung von linearen Gleichungen und von linearen Gleichungs-
systemen mit 2 oder 3 Variablen. . . . . . . . . . . . . . . . . . 32
2.5.3 Quadratische Funktionen. . . . . . . . . . . . . . . . . . . . . . 36
2.5.4 Lösen von quadratischen Gleichungen. . . . . . . . . . . . . . . 40
2.5.5 Ganzrationale Funktionen. . . . . . . . . . . . . . . . . . . . . 41
2.5.6 Gebrochenrationale Funktionen. . . . . . . . . . . . . . . . . . 45
2.5.7 Bruch- und Wurzelgleichungen. . . . . . . . . . . . . . . . . . 49
2.5.8 Transzendente Funktionen. . . . . . . . . . . . . . . . . . . . . 50
2.5.9 Exponentialgleichungen und logarithmische Gleichungen. . . . 52
3 Trigonometrische Funktionen 54
3.1 Winkeleinheiten. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.2 Recht- und schiefwinklige Dreiecke. . . . . . . . . . . . . . . . . . . . 55
3.3 Definition der trigonometrischen Funktion am Kreis. . . . . . . . . . . . 57
3.4 Graphen der trigonometrischen Funktionen. . . . . . . . . . . . . . . . 58
3.5 Additionstheoreme. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.6 Goniometrische Gleichungen. . . . . . . . . . . . . . . . . . . . . . . . 63
3.7 Zyklometrische Funktionen. . . . . . . . . . . . . . . . . . . . . . . . . 64
3.8 Berechnungen am Dreieck. . . . . . . . . . . . . . . . . . . . . . . . . 69
3.8.1 Rechtwinklige Dreiecke. . . . . . . . . . . . . . . . . . . . . . 69
3.8.2 Schiefwinklige Dreiecke. . . . . . . . . . . . . . . . . . . . . . 69
3.9 Näherungsformel für trigonometrische Funktionen. . . . . . . . . . . . 71
3.9.1 Zusammenhang der trigonometrischen Funktionen mit der Expo-
nentialfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.10 Die Hyperbelfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.11 Die Areafunktionen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4 Einführung in die Vektorrechnung 79
4.1 Geometrie von Vektoren. . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.2 Norm (Betrag) eines Vektors. . . . . . . . . . . . . . . . . . . . . . . . 83
4.3 Skalarprodukt von Vektoren. . . . . . . . . . . . . . . . . . . . . . . . 84
4.4 Kreuzprodukt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3

1 Zahlensysteme
1.1 Natürliche und ganze Zahlen
Darstellung der natürlichen Zahlen auf der Zahlengerade:
+1
111098765421 30
Abkürzungen:
N – Menge der natürlichen Zahlen
N0 – Menge der natürlichen Zahlen einschließlich der Null
Es gibt keine größte natürliche Zahl
Darstellung der ganzen Zahlen auf der Zahlengerade:
+5-6 -5 -4 -3 -2 -1 +1 +2 +3 +4 +60
+1-1
bzw.
-6 -5 -4 -3 -2 -1 0 654321
Abkürzung:
Z – Menge der ganzen Zahlen
4

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
1.2 Rationale Zahlen
1.2.1 Teilbarkeitsregel
Definition:
Läßt sich eine natürliche Zahlb ohne Rest durch eine natürliche Zahla teilen, so
wird der Divisora Teiler der Zahlb genannt.
Spezialfälle:
1. Jede natürliche Zahl ist Teiler von sich selbst.
2. Jede natürliche Zahl ist Teiler der Zahl 0.
3. Jede natürliche Zahl hat den Teiler 1.
Eine natürlich Zahl, die keinen echten Teiler besitzt (d.h. nur sich selbst und 1 als Teiler
besitzt), wirdPrimzahl genannt, z.B.:
2,3,5,7,11,13,17,19,23,29, . . .
Eine natürlich Zahl, die echte Teiler hat, wirdzusammengesetzte Zahlgenannt, z.B.:
4,6,8,9,10,12,14,15,16,18, . . .
Sieht man von der Reihenfolge ab, so läßt sich jede zusammengesetzte Zahl eindeutig in
ein Produkt aus Primfaktoren zerlegen, z.B.:
165= 3·5·11
Teilbarkeitsregeln:
Eine Zahl ist genau dann durch
• 2 teilbar, wenn ihre letzte Ziffer durch 2 teilbar ist.
• 3 teilbar, wenn ihre Quersumme durch 3 teilbar ist.
• 4 teilbar, wenn die aus ihren letzten beiden Ziffern gebildete Zahl durch 4 teilbar
ist, oder die letzten beiden Ziffern Nullen sind.
• 5 teilbar, wenn ihre letzte Ziffer 5 oder 0 ist.
• 6 teilbar, wenn sie gerade ist und ihre Quersumme durch 3 teilbar ist.
• 8 teilbar, wenn die aus ihren letzten 3 Ziffern gebildete Zahl durch 8 teilbar ist.
• 9 teilbar, wenn ihre Quersumme durch 9 teilbar ist.
5

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Definition:
Jede Zahl, die sich als Quotient ganzer Zahlen darstellen läßt heißtrationale Zahl.
Darstellung der rationalen Zahlen auf der Zahlengerade:
3
4 - -
9
4
1
4
5
2
10 2 3-2-3 -1
Abkürzung:
Q – Menge der rationalen Zahlen.
1.2.2 Die vier Grundrechenarten
Addition
Grundregeln:
(1) a+b = b+a Kommutativgesetz
(2) a+0 = 0+a = a neutrales Element
(3) (a+b)+c = a+(b+c) Assoziativgesetz
Vorzeichenregelung:
(1) (+a)+(+b) = +a+b = a+b
(2) (−a)+(−b) =−a−b =−(a+b)
(3) (+a)+(−b) = +a−b = a−b
(4) (−a)+(+b) =−a+b =−(a−b)
6

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Subtraktion
Die Subtraktion ist die Umkehroperation der Addition.
Vorzeichenregelung:
Eine Zahl wird subtrahiert, indem sie mit entgegengesetztem Vorzeichen addiert
wird.
(1) (+a)− (+b) = (+a)+(−b) = a−b
(2) (−a)− (−b) = (−a)+(+b) =−a+b
(3) (+a)− (−b) = (+a)+(+b) = a+b
(4) (−a)− (+b) = (−a)+(−b) =−a−b
Multiplikation
Grundregeln:
(1) a·b = b·a Kommunikativgesetz
(2) a·1 = 1·a = a neutrales Element
(3) (a·b) ·c = a· (b·c) Assoziativgesetz
(4) a· (b+c) = a·b+a·c = (b+c) ·a Distributivgesetz
Vorzeichenregelung:
Zwei Faktoren mit gleichen Vorzeichen ergeben ein positives, mit ungleichen Vor-
zeichen ein negatives Produkt.
(1) (+a) · (+b) = +a·b = ab
(2) (−a) · (−b) = +a·b = ab
(3) (+a) · (−b) =−a·b =−ab
(4) (−a) · (+b) =−a·b =−ab
Spezialfälle:
a·0 = 0
(a+b) · (c+d) Multiplikation von Klammern
= a· (c+d)+b· (c+d)= ac+ad+bc+bd
7

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Division
Die Division ist die Umkehroperation der Multiplikation.
Vorzeichenregelung:
Der Quotiont ist positiv, wenn Divident und Divisor gleiche Vorzeichen haben,
negativ bei ungleichen Vorzeichen.
(1) (+a) : (+b) = +a : b =ab
(2) (−a) : (−b) = +a : b =ab
(3) (+a) : (−b) =−a : b =−ab
(4) (−a) : (+b) =−a : b =−ab
Spezialfälle:
−ab
=−ab
=a−b
(a+b) : c = a : c+b : c =ac
+bc
ab
=mamb
m∈Z, Erweitern
mamb
=ab
m∈Z, Kürzen
1.2.3 Das Rechnen mit Brüchen
Addition/Subtraktion von Brüchen
Gleichnamige Brüche werden addiert (subtrahiert), indem man den Zähler addiert
(subtrahiert) und den Nenner beibehält.
ac
+bc
=a+b
cbzw.
ac− b
c=
a−bc
a,b,c∈Z
Ungleichnamige Brüche müssen vor der Addition (Subtraktion) gleichnamig gemacht
werden (→ geschicktes Erweitern, so daß beide Brüche den gleichen Nenner haben).
ab
+cd
=adbd
+cbbd
=ad+cb
bd
8

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Multiplikation von Brüchen
ab· cd
=acbd
ab·m=
amb
a,b,c,d,m∈Z
Division von Brüchen
Man dividiert durch einen Bruch, indem man mit dem Kehrwert des Bruchs multi-
pliziert.
a :bc
= a· cb
=acb
ab
: c =ab· 1c
=abc
ab
:cd
=
abcd
=ab· d
cDoppelbruch
∀a,b,c∈Z
Das Umrechnen von Dezimalzahlen in Brüche
Endliche Dezimalzahlen
Endliche Dezimalzahlen können durch Erweitern mit einer Zehnerpotenz und an-
schließendes Kürzen sehr einfach in Brüche umgerechnet werden.
Seid eine Dezimalzahl mitx Nachkommastellen, so gilt:
d =p·10x
10x
9

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Unendliche periodische Dezimalzahlen
Für eine unendliche periodische Dezimalzahlp mit Periodenlängey gilt analog:
p =d(10y−1)
10y−1
Beispiele:
(1)
0.25 =0.25·102
102
=25100
Kürzen mit 25:
⇒ 0.25 =14
(2)
0.45 =0.45· (102−1)
102−1
=45.45−0.45
99
=4599
Kürzen mit 9:
⇒ 0.45 =511
10

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
1.3 Reelle Zahlen
1.3.1 Potenzen
Definition:
an ist die abkürzende Schreibweise füra·a·a· . . . ·a, und zwarn-mal.
an
Potenz Exponent
Basis
Rechenregel:
∀ a > 0 oderb > 0 oderm,n∈Z
(1) am ·an = am+n
(2) an ·bn = (a·b)n
(3) a−n =1an
(4)am
an = am−n
(5)an
bn =(a
b
)n
(6) (an)m = an·m = (am)n
Spezialfälle:
(7) a1 = a, a0 = 1 für a 6= 0
0n = 0 für n 6= 0, 1n = 1
(8) (−a)2n = +a2n, (−a)2n+1 =−a2n+1
1.3.2 Binomische Formeln
(1) (a+b)2 = a2 +2ab+b2
(2) (a−b)2 = a2−2ab+b2
(3) (a+b)(a−b) = a2−b2
Höhere Potenzen:
(a±b)3 = a3±3a2b+3ab2±b3
(a±b)4 = a4±4a3b+6a2b2±4ab3 +b4
11

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Für dien-te Potenz des Ausdruckes(a±b) erhält man die Koeffizienten der gemischten
Terme mit Hilfe des Pascalschen Dreiecks.
Pascalsches Dreieck
0 1
1 1 1
2 1 2 1
3 1 3 3 1
4 1 4 6 4 1
5 1 5 10 10 5 1
6 1 6 15 20 15 6 1
Verschiedene Aspekte des Potenzierens an = b:
1. Potenzrechnung
gegeben:a,n gesucht:b
Schreibweise:an = b Beispiel: 23 = 8
2. Wurzelrechnung
gegeben:b,n gesucht:a
Schreibweise:n√
b = a Beispiel: 3√
8 = 2
3. Logarithmenrechnung
gegeben:a,b gesucht:n
Schreibweise: logab = n Beispiel:log2 8 = 3
1.3.3 Wurzeln
Definition:
Unter dern-ten Wurzel n√
b aus einer Zahlb versteht man diejenige Zahla, die mit n
potenziertb ergibt. (1. Umkehrung des Potenzierens).
n√
b = a ⇔ an = b
12

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Rechenregeln:
(1) n√
a = a1n n,m∈Z a > 0 oderb > 0
n√
am = amn Zusammenhang mit der Potenzrechnung
(2) n√
a· n√
b = n√
(ab)
(3)n√an√b
= n√a
b
(4) n√
m√
a = n·m√a = m√
n√
a
(5) n√
am = ( n√
a)m
Spezialfälle:
(6) n√
1 = 1 n√
0 = 0
(7) 1√
a = a n√
an = a
(8) 2√
a =√
a spezielle Bezeichnungsweise
13

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
1.3.4 Irrationale Zahlen
Behauptung:
Es gibt keine rationale Zahl, die mit sich selbst multipliziert den Wert 2 ergibt!
Beweis:
Es seix die Zahl, deren Quadrat 2 ergibt:
x2 = 2 ⇔ x =√
2
Annahme:
x ist eine rationale Zahl, d.h.x = ab, mit a,b ∈Z, wobei a und b keinen
gemeinsamen Teiler mehr besitzen (d.h. der Bruch ist vollständig gekürzt).
⇒ x2 = 2 =a2
b2
⇒ 2b2 = a2
⇒ a2 ist gerade
a2 kann aber nur dann gerade sein, wenn in der Primzahlzerlegung vona
eine 2 vorkommt, also
a2 ist durch 4 teilbar.
und damit
2b2 ist durch 4 teilbar.
⇒ b2 ist durch 2 teilbar
⇒ b ist durch 2 teilbar
⇒ ab
ist kürzbar im Widerspruch zur Annahme
⇒ x ist keine rationale Zahl!
14

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Man kann die Zahl√
2 jedoch durch rationale Zahlen nähern:
Intervallschachtelung
12 = 1, 22 = 4 ⇒ 1 <√
2 < 2
1.52 = 2.25 ⇒ 1 <√
2 < 1.5
1.252 = 1.5625 ⇒ 1.25<√
2 < 1.5
1.42 = 1.96 ⇒ 1.4 <√
2 < 1.5
1.452 = 2.1025 ⇒ 1.4 <√
2 < 1.45
1.422 = 2.0164 ⇒ 1.4 <√
2 < 1.42
1.412 = 1.9881 ⇒ 1.41<√
2 < 1.42
1.4152 = 2.002225 ⇒ 1.41<√
2 < 1.415
1.4142 = 1.999396 ⇒ 1.414<√
2 < 1.415
usw.
Schneller funktioniert das
Heronverfahren
Das Heronverfahren ist einiteratives Verfahren zur Berechnung eines Nährungs-
wertes für√
a. Man startet mit einem groben Nährungswertx0 und berechnet mit dessen
Hilfe einen besseren Nährungswertx1. Diesen benutzt man wiederum, um einen noch
besseren Nährungswertx2 zu berechnen und so fort:
xn+1 =12
(xn +
axn
)n = 0,1,2. . .
Beispiel:
√6, → a = 6, x0 = 3
x1 =12
(x0 +
6x0
)=
12
(3+
63
)=
12·5 = 2.5
x2 =12
(x1 +
6x1
)=
12
(2.5+
62.5
)= 2.45
x3 =12
(x2 +
6x2
)=
12
(2.45+
62.45
)= 2.449489
x4 = 2.449489743, x5 = · · ·
15

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Der Taschenrechner liefert:√
6 = 2.449489743
Beide Prozesse lassen sich beliebig lange fortsetzen, ohne daß man den genauen
Wert erhält oder sich eine periodische Wiederholung der Dezimalstellen ergibt. Daher
sind√
2,√
6 usw. unendliche, nichtperiodische Dezimalbrüche.
Definition:
Unendliche, nicht periodische Dezimalbrüche nennt manirrationale Zahlen . Die
irrationalen Zahlen bilden zusammen mit den rationalen Zahlen die Menge derreellen
Zahlen R.
Für je zwei reelle Zahlena,b gilt genau eine der folgenden drei Beziehungen:
a < b oder a = b oder a > b
Beziehungen der Forma < b unda > b werden alsUngleichungenbezeichnet. Zu ihnen
zählt man auch die Beziehungena≥ b unda≤ b.
Definition:
Unter dem Betrag einer reellen Zahl wird der Abstand des zugeordneten Bild-
punktes zum Nullpunkt verstanden. Er wird durch das Symbol|a| gekennzeichnet und ist
stets positiv:
|a|=
a a> 0
0 falls a = 0
−a a< 0
Es gilt: |a| ≥ 0
Beispiele:
|3|= 3 |−5|= 5 |π|= π
|2x+2|=
{2x+2 falls x≥−1
−(2x+2) falls x <−1
denn es gilt: 2x+2≥ 0⇔ 2x≥−2⇔ x≥−1
2x+2 < 0⇔ 2x <−2⇔ x <−1
16

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Spezielle Teilmengen von R
N0= {0,1,2,3,4, . . .} natürliche Zahlen mit 0
N= {1,2,3,4, . . .} natürliche Zahlen
Z= {0,±1,±2,±3, . . .} ganze Zahlen
Q= {x|x =ab, mit a∈Z,b∈N} rationale Zahlen
Wichtige Intervalle
1. Endliche Intervalle
• [a,b] = {x|a≤ x≤ b} abgeschlossenes Intervall
• [a,b) = {x|a≤ x < b} halboffenes Intervall
• (a,b] = {x|a < x≤ b} halboffenes Intervall
• (a,b) = {x|a < x < b} offenes Intervall
2. Unendliche Intervalle
• [a,∞), (a,∞)
• (−∞,b], (−∞,b)
• (−∞,0] =R−0 , [0,∞) =R+
0
• (−∞,∞) =R
1.3.5 Logarithmen
Das Logarithmieren ist die zweite Umkehrung des Potenzierens. Mit Hilfe des Logarith-
mus läßt sich bei bekannter Potenzb und Basisa der Exponentn ermitteln:
= logn ba
BasisLogarithmus
Numerus
Sprechweise: n ist der Logarithmus vonb zur Basisa.
Rechenregeln:
(1) alogab = b
(2) loga(b·c) = logab+ logac
17

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
(3) loga
(bc
)= logab− logac
(4) loga(bx) = x · logab
Spezialfälle:
(5) logaa = 1 loga1 = 0
(6) loga
(1b
)=− logab
(7) logax√
b =1x· logab
Spezielle Bezeichnungsweise:
• log10 → lg Dekadischer Logarithmus
• loge → ln Natürlicher Logarithmus
• log2 → lb Binärer Logarithmus
Umrechnung von einer Basis auf die andere:
logab =logcblogca
Beweis:
nach (1) gilt: alogab = b
⇒ logc
(alogab
)= logcb
mit (4) ⇒ logab· logca = logcb
⇒ logab =logcblogca
1.4 Komplexe Zahlen
Eine Quadratwurzel aus einer negativen Zahl ist eine imaginäre Zahl:
√−9 =
√9· (−1) =
√9·√−1 = 3
√−1√
−a2 =√
a2 · (−1) =√
a2 ·√−1 = a
√−1
√−1 wird als eine neue Zahl eingeführt, die nach Eulerimaginäre Einheit genannt und
mit dem Buchstabenj bezeichnet wird.
j2 =−1 j =√−1
18

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Imaginäre Zahlen sind nun neben der imaginären Einheitj auch alle reellen Vielfachen
a· j,a∈ R, also z.B.
3 j, − j, −√
17j
Zu beachten ist, daß vor Anwendung von Rechenregeln auf imaginäre Zahlen diese stets
als Produkt zu schreiben sind, das den Faktorj enthält, also
√−a = j
√a
√−a√−b = j
√a j√
b = j2√
ab=−√
ab√−3√−27= j
√3 j√
27= j2√
81=−9
Definition:
Als komplexe Zahlz bezeichnet man die Zahl
z= a+ jb a,b∈R
Abkürzung:
C - Menge der komplexen Zahlen
Gleichheit von Komplexen Zahlen:
a+ jb = c+ jd genau dann, wenn a = c und b = d
Sonderfälle:
a = 0 imaginäre Zahl
b = 0 reelle Zahl
Darstellung in derGaußschen Zahlenebene:
−1
−2
−3
−4
−5
−6
j
j
j
j
j
j
−5 −4 −3 −2 −1 654321−6
4
5
3
2
1
j
j
j
j
j
4+3j
Im(z)
(imaginäre Achse)
Re(z)
(reelle Achse)
−6−3 j
19

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Rechenregeln:
(1) (a+ jb)+(c+ jd) = (a+c)+ j(b+d)
(2) (a+ jb)− (c+ jd) = (a−c)+ j(b−d)
(3) (a+ jb) · (c+ jd) = (ac−bd)+ j(ad+bc)
Binomische Formeln:
(1) (a+ jb)2 = a2 +2 jab−b2
(2) (a− jb)2 = a2−2 jab−b2
(3) (a+ jb) · (a− jb) = a2 +b2
Division:
(1)a+ jb
c=
ac
+ jbc
(2)a+ jb
jc=
j(a+ jb)j2c
=ja−b−c
=bc− j
ac
(3)(a+ jb)(c+ jd)
=(a+ jb) · (c− jd)(c+ jd) · (c− jd)
=ac+bd+ j(bc−ad)
c2 +d2
=ac+bdc2 +d2 + j
bc−adc2 +d2
20

2 Funktionen
2.1 Der Begriff der Funktion
Definition:
Eine Funktion ist eine Menge geordneter Paare(x,y). Dabei wird jedem Element
x aus einer MengeD genau ein Elementy aus einer MengeW zugeordnet.
Die Elementex ∈ D heißenArgument oder unabhängige Variable, die Elemente
y = f (x) ∈W heißenFunktionswert oderabhängige Variableder Funktion.
Die Menge D aller Argumente bildet denDefinitionsbereich, die Menge W den
Wertebereich der Funktion. Die Menge aller Funktionswertef (D) wird Wertemenge
genannt, für sie giltf (D)⊆W.
2.2 Darstellung von Funktionen
2.2.1 Analytische Darstellung
f : D→W
x→ y = f (x) (Angabe der Zuordnungsvorschrift), bzw.
f : y = f (x) oder f : y = y(x)
Leseart:
• y = f (0) Funktionswert an der Stellex = 0
• y = f (a) Funktionswert an der Stellex = a
• y = f (x1) Funktionswert an der Stellex = x1
Die Zuordnungsvorschrift wird i.A. durch eine Gleichung (Funktionsgleichung) darge-
stellt, z.B.
y = 2x+5 oder y−2x−5 = 0
21

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Man nennt die verschiedenen Formen der Funktionsgleichungen:
• explizite Form nachy y= f (x) z.B. y = 2x−1
• explizite Form nachx x= f (y) z.B. x = 12y+ 1
2
• implizite Form F(x,y) = 0 z.B. y−2x+1 = 0
2.2.2 Darstellung durch Wertetabellen
x y
1 1
2 3
3 5
4 7
y = 2x−1
Dies findet häufige Verwendung bei der Aufnahme von Meßergebnissen und für Funktio-
nentafeln.
2.2.3 Graphische Darstellung
Kartesisches Koordinatensystem
Es kann jedem Punkt ein geordnetes Paar(x,y) zugeordnet werden. Die Menge
graph f = {(x,y)|x∈ D,y∈W : y = f (x)}
bildet dann denGraphen oder dieKurve der Funktion f.
Polarkoordinaten
Um die Lage eines Punktes in der Ebene festzulegen, kann man statt der kartesischen
Koordinaten(a,b) auch den Abstandr vom Ursprung(0,0) und den Winkelϕ, den die
Verbindungslinie zwischen Punkt und Ursprung mit derx-Achse bildet, angeben. Der
Winkel ϕ wird gegen den Uhrzeigersinn positiv gezählt.
ϕ
P(a,b)
y
x
r
a
b
22

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Umrechnung von kartesischen Koordinaten in Polarkoordinaten:
r =√
a2 +b2, tanϕ =ba
Umrechnung von Polarkoordinaten in kartesische Koordinaten:
a = r ·cosϕ b = r ·sinϕ
2.2.4 Parameterdarstellung
Es ist möglich, sowohlx als auchy in Abhängigkeit einerHilfsvariablen oder eines
Parametersdarzustellen:
x = Φ(t) y = Ψ(t) t : Hilfsvariable
Die Parameterdarstellung ist häufig vorteilhaft bei der Beschreibung von Bewegungsvor-
gängen.
Beispiel:
Waagerechter Wurf
x = ν0 · t y =−12
gt2
Die Parameterdarstellung kann in kartesische Form gebracht werden, indem eine der bei-
den Gleichungen nacht hin umgestellt und dann in die andere eingesetzt wird:
t =xν0
⇒ y =−12
g
(xν0
)2
⇒ y =− g
2ν20
·x2
Der resultierende Graph ist eine Parabel (Wurfparabel).
23

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
2.3 Eigenschaften von Funktionen
2.3.1 Monotonie
Definition:
Eine Funktion f heißt in einem IntervallI monoton steigend, wenn für allex1,x2 ∈ I
gilt:
x1 < x2 ⇒ f (x1)≤ f (x2)
Eine Funktionf heißt unter den gleichen Bedingungenmonoton fallend, falls gilt:
x1 < x2 ⇒ f (x1)≥ f (x2)
Man spricht vonstreng monoton steigendbzw.streng monoton fallend, falls gilt:
x1 < x2 ⇒ f (x1) < f (x2) bzw. x1 < x2 ⇒ f (x1) > f (x2)
2.3.2 Gerade/ungerade Funktionen
Definition:
Eine Funktion f heißt gerade Funktion, wenn mit jedemx ∈ D auch−x ∈ D ist,
und für allex∈ D gilt:
f (x) = f (−x)
Die Kurven gerader Funktionen sind stets symmetrisch zury-Achse (Achsensymmetrie).
Eine Funktion f heißt ungerade Funktion, wenn mit jedemx ∈ D auch−x ∈ D
ist, und für allex∈ D gilt:
f (x) =− f (−x)
Die Kurven ungerader Funktionen sind stets symmetrisch zum Koordinatenursprung
(Punktsymmetrie).
Beispiele:
(1) f (x) =x2−1x2 +1
ist gerade, denn
f (−x) =(−x)2−1(−x)2 +1
=x2−1x2 +1
= f (x)
24

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
(2) f (x) = 3x(x2−5) ist ungerade, denn
f (−x) = 3(−x)((−x)2−5) =−3x(x2−5) =− f (x)
(3) f (x) = x2 +2x+3 ist weder gerade noch ungerade, denn
f (−x) = (−x)2 +2(−x)+3 = x2−2x+3 6= f (x) 6=− f (x)
−4 −3 −2 −1 0 1 2 3 4−13
−11
−9
−7
−5
−3
−1
1
3
5
7
9
11
13
(3)unsym−metrisch
(2)punkt−symmetrisch
(1)achsen−symmetrisch
2.3.3 Beschränktheit
Definition:
Eine Funktion heißtnach oben beschränkt bzw. nach unten beschränkt, wenn
die Wertemengef (D) nach oben bzw. nach unten begrenzt ist. Sie heißtbeschränkt,
wenn sie sowohl nach oben als auch nach unten beschränkt ist.
Beispiele:
(1) y = x3 +3x D = R, f (D) = R nicht beschränkt
(2) y = x2−2 D = R, f (D) = [−2,∞) nach unten beschränkt
(3) y =√
3−x D = (−∞,3], f (D) = [0,∞) nach unten beschränkt
(4) y = ln(9−x2) D = (−3,3), f (D) = (−∞, ln9] nach oben beschränkt
25

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
−4 −3 −2 −1 0 1 2 3 4−10
−5
0
5
10
(1)
(2)
(3)
(4)
2.3.4 Injektive, surjektive und bijektive Funktionen
Definition:
Eine Funktion f : D → W, x → y = f (x) heißt injektiv , wenn für allex1,x2 ∈ D
gilt:
x1 6= x2 ⇒ f (x1) 6= f (x2),
d.h. falls jedemy∈W höchstens einx∈ D zugeordnet ist.
Sie heißtsurjektiv , falls
f (D) = W,
d.h. falls jedemy∈W mindestens einx∈ D zugeordnet ist.
Ist eine Funktion sowohl injektiv als auch surjektiv, so wird siebijektiv genannt,
d.h. jedemy∈W ist genau einx∈ D zugeordnet und umgekehrt.
26

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Beispiele:
−6 −4 −2 0 2 4 6−4
0
4
8
12
16
y = x2
• f : R→ R, x→ y = x2 weder injektiv noch surjektiv
• f : R→ R+0 , x→ y = x2 surjektiv
• f : R+0 → R, x→ y = x2 injektiv
• f : R+0 → R+
0 , x→ y = x2 bijektiv
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1 x2 + y2 = 1
• D = W = R keine Funktion
• D = [−1,1] W = [−1,1] keine Funktion
• D = [−1,1] W = [0,1] surjektiv
• D = [0,1] W = R+0 injektiv
• D = [0,1] W = [0,1] bijektiv
27

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
2.4 Umkehrfunktionen
Ist f : D → W, x → y = f (x) bijektiv, so gibt es zu jedemy ∈ W genau ein
Urbild x mit f (x) = y. Man nennt die Funktion, welche jedemy ∈ W sein Ur-
bild x zuordnet, dieUmkehrfunktion zu f ; sie ist ebenfalls bijektiv und wird mit
f−1 : W → D, y→ x = f−1(y) bezeichnet.
Meist behält man die unübliche Schreibweise der Variablen nicht bei, sondern ver-
tauschtx undy und schreibt:
f−1 : y = f−1(x)
2.4.1 Rechnerische Bestimmung der Umkehrfunktion
Es gibt zwei Möglichkeiten:
1. y = f (x) nachx auflösen und anschließend die Variablen vertauschen.
2. zunächst die Variablen vertauschen und dannx = f (y) nach y auflösen.
Beispiel: f : y = 2x+1
1. y = f (x) nachx auflösen: 2x = y−1
x =y−1
2
Variablen vertauschen: f−1 : y =x−1
2
2. Variablen tauschen: x = 2y+1
x = f (y) nach y auflösen x−1 = 2y
x−12
= y
f−1 : y =x−1
2
Es gilt:
f−1( f (x)) = x bzw. f ( f−1(x)) = x
28

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Beispiel:
f : y = f (x) = x2 x∈R+
f−1 : y = f−1(x) =√
x
⇒ f−1( f (x)) = f−1(x2) =√
x2 = x
f ( f−1(x)) = f (√
x) = (√
x)2 = x
2.4.2 Graph von Funktion und Umkehrfunktion
Für eine graphische Darstellung bedeutet eine Vertauschung der Variablen eine Vertau-
schung der Koordinaten.
Man erhält die graphische Darstellung der Umkehrfunktion, indem man den
Graph der Funktion f an der Geraden y= x spiegelt.
Beispiele:
−5 0 5 10−5
0
5
10
y = exp(x)
y = ln(x)
y = x
29

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
−5 0 5 10−5
0
5
10
y = + x
y = − x
y = x y = x2
√
√
2.5 Rationale Funktionen
2.5.1 Lineare Funktionen
Die allgemeine Form einer linearen Funktion (Funktion 1. Grades) lautet:
y = mx+b
wobeim undb beliebige Konstanten ausR sind.
Die Kurve einer Funktion 1. Grades ist stets eine Gerade.
2y
1y
1x 2x
1yy2 -2x 1x-
=m
y
x
y= mx + b
Steigungsdreieck
b
30

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
In der Funktiony = mx+b ist b der Abschnitt auf dery-Achse (Achsenabschnitt) undm
dieSteigungder Geraden. Für diese gilt:
m=y2−y1
x2−x1=
f (x2)− f (x1)x2−x1
-10-2-4-6 2 4 80
-6
-4
0
2
4
6
8
-2
-8
10
3y 2y
1y
6-8
y
x
y1 = 2x
y2 = 3x
y3 =−2x−2
Spezialfälle:
1. b = 0 y = mx Gerade durch den Ursprung
2. m= 0 y = b Gerade parallel zurx-Achse
3. x = a a∈R Gerade parallel zury-Achse (KEINE Funktion!)
Abgesehen von den beiden zuletzt genannten Spezialfällen sind Geraden stets streng
monoton steigend (m > 0) oder streng monoton fallend (m < 0). Daher sind Geraden
immer bijektive Funktionen.
Nullstellen einer linearen Funktion
Die Stelle x, an der die Funktion diex-Achse schneidet, nennt manNullstelle. Sie
kann der graphischen Darstellung entnommen werden, oder aber rechnerisch bestimmt
werden.
Rechnerische Bestimmung der Nullstelle:
In die Funktionsgleichung füry den Wert 0 einsetzen und die entstehende Glei-
chung nachx auflösen.
31

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Beispiel:
y = 2x+3
Nullstelle: 0 = 2x+3 |−3
−3 = 2x | : 2
x = −32
2.5.2 Lösung von linearen Gleichungen und von linearen
Gleichungssystemen mit 2 oder 3 Variablen
Lineare Gleichungen
Eine lineare Gleichung mit einer Variablen
ax+b = 0, a 6= 0
besitzt genau eine Lösung
x =−ba
Die Lösung einer linearen Gleichung mit einer Variablen stimmt mit der
Nullstelle der zugehörigen Funktion y= ax+b überein.
→ graphische Lösungsmöglichkeit
Lineare Gleichungen mit zwei Variablen
Eine lineare Gleichung mit zwei Variablen läßt sich stets in folgender Form angeben:
ax+by= c
Ein Zahlpaar(x,y), das diese Gleichung zu einer wahren Aussage macht heißt Lösung
dieser Gleichung.
Eine Gleichung mit zwei Variablen hat i.A. uendlich viele Lösungen, die, graphisch
dargestellt, auf der Geradenax+by= c liegen.
Um zwei Variablen eindeutig festzulegen, reicht eine einzige Gleichung nicht aus.
Erst ein System aus zwei Gleichungen kann ein Wertepaar(x,y) eindeutig festlegen, das
sowohl die erste als auch die zweite Gleichung löst.
32

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Beispiel:
3x+y = 15
5x−6y = 2
}Lineares Gleichungssystem mit zwei Variablen
−5 −4 −3 −2 −1 0 1 2 3 4 5 6 7 8 9 10−5
−4
−3
−2
−1
0
1
2
3
4
5
6
7
8
9
10
5x−6y=2
3x+y=15
Schnittpunkt (4,3)
Für die Lösbarkeit eines linearen Gleichungssystems mit zwei Variablen ergeben sich
drei Möglichkeiten:
1. Die Geraden schneiden sich → genau eine Lösung
2. Die Geraden sind parallel → keine Lösung
3. Die Geraden sind gleich → unendlich viele Lösungen
Numerische Verfahren zur Lösung des Gleichungssystems:
Einsetzverfahren
Eine der beiden Gleichungen wird nach einer Variablen umgestellt. Der enstehende
Ausdruck wird dann an Stelle dieser Variablen in die zweite Gleichung eingesetzt. Es
entsteht eine neue Gleichung mit einer Unbekannten, die man lösen kann.
33

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Beispiel:
(1) 3x+y = 15
(2) 5x−6y = 2
(1) nachy auflösen:
(3) y = 15−3x
In (2) einsetzten:
5x−6(15−3x) = 2
Ausrechnen:
5x−90+18x = 2
23x = 92 ⇒ x = 4
Ergebnis fürx in (3) einsetzen:
y = 15−3·4 = 3
Gleichsetzungsverfahren
Man löst beide Gleichungen nach derselben Variablen auf und setzt die so entstehenden
Ausdrücke gleich. Es entsteht wiederum eine Gleichung mit nur einer Variablen.
Beispiel:
(1) 3x+y = 15
(2) 5x−6y = 2
Auflösung beider Gleichungen nachy:
(3) y = 15−3x
(4) −6y = 2−5x ⇒ y =56
x− 13
Gleichsetzen:
15−3x =56
x− 13
Auflösen nachx:
90−18x = 5x−2
−23x =−92 ⇒ x = 4
Wert fürx in (3) einsetzen:
y = 15−3·4 = 3
34

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Additionsverfahren
Man multipliziert eine der Gleichungen mit einem geeigneten Faktor, so daß eine
der Variablen herausfällt, wenn man die neuen Gleichungen addiert. Es entsteht wieder
eine Gleichung mit einer Variablen.
Beispiel:
(1) 3x+y = 15
(2) 5x−6y = 2
Multiplikation von (1) mit 6:
(3) 18x+6y = 90
(4) 5x−6y = 2
Addition von (3) und (4):
18x+5x+6y−6y = 90+2
23x = 92 ⇒ x = 4
Wert fürx in (2) einsetzen:
5·4−6y = 2
−6y =−18 ⇒ y = 3
Lineare Gleichungssysteme (drei Gleichungen mit drei Variablen)
Zur Lösung dieser Gleichungssysteme werden ebenfalls Einsetz–, Gleichsetz– und
Additionsverfahren verwendet.
Beispiel:
(1) 4x+y−2z= 0
(2) 3x+2y+3z= 16
(3) 5x−y+3z= 12
(1)+(3) : (4) 9x+z= 12
(2)+2· (3) : (5) 13x+9z= 40
−9(4)+(5) : (6) −68x =−68
35

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
x = 1
(4) z= 12−9x = 12−9·1 = 3
(1) y = 2z−4x = 2·3−4·1 = 2
Probe:
4·1+2−2·3 = 4+2−6 = 0√
3·1+2·2+3·3 = 3+4+9 = 16√
5·1−2+3·3 = 5−2+9 = 12√
2.5.3 Quadratische Funktionen
Eine Funktion der Form
y = ax2 +bx+c a,b,c∈R, a 6= 0
heißtquadratische Funktion.
Spezielle Formen:
1. y = x2 Normalparabel
Eigenschaften:
• gerade Funktion
• Scheitelpunkt beiS= (0,0)
• D = R f (D) = R+0 surjektiv
2. y = x2 +q
Eigenschaften:
• Die Normalparabel ist umq auf dery-Achse verschoben
• gerade Funktion
• S= (0,q)
• D = R f (D) = [q,∞) surjektiv
36

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
−4 −3 −2 −1 0 1 2 3 4−5
−4
−3
−2
−1
0
1
2
3
4
5
6
7
8
y=x2+2
y=x2
y=x2−4
S=(0,2)
S=(0,−4)
Scheitelpunkt S
3. y = x2 + px+q
Eigenschaften:
• Die entstehende Normalparabel ist sowohl inx– als auch iny-Richtung ver-
schoben
• weder gerade noch ungerade
• Die Bestimmung des Scheitelpunktes anhand der gegebenen Form der Glei-
chung ist schwierig. Es läßt sich jedoch jede Gleichung der Formy= x2+ px+q durch geeignete Umformung (quadratische Ergänzung) in die Gestalt
y = (x−xs)2 +ys
bringen. Der Scheitelpunkt ist dann gegeben durch
S= (xs,ys)
37

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Beispiel:
y = x2−6x+7
⇔ y = x2−6x+9−9+7
⇔ y = x2−6x+9−2
⇔ y = (x−3)2−2
• D = R f (D) = [ys,∞) surjektiv
−4 −2 0 2 4 6−2
0
2
4
6
8
10
y=(x−2)2+4
y=(x−2)2 y=x2
S=(2,4)
S=(2,0)
4. y = ax2 +bx+c
Eigenschaften:
• Der Faktora vor demx2 bewirkt eine Streckung oder Stauchung der Normal-
parabel. Für Wertea < 0 ist die Parabel nach unten geöffnet.
38

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
−8 −6 −4 −2 0 2 4 6 8−10
−8
−6
−4
−2
0
2
4
6
8
10
y=2x2
y=x2
y=0.5x2
y= −x2
y= −0.5x2
• Auch hier läßt sich der Scheitelpunkt nach entsprechender quadratischer
Ergänzung direkt ablesen.
Beispiel:
y =−12x2 +2x+3
y =−12(x2−4x−6) | Faktor−1
2 ausklammern
y =−12(x2−4x+4−4−6) | Quadratische Ergänzung
y =−12(x2−4x+4−10)
y =−12((x−2)2−10)
y =−12(x−2)2 +5 | Faktor−1
2 einmultiplizieren
S= (2,5) | Scheitelpunkt ablesen
39

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
2.5.4 Lösen von quadratischen Gleichungen
Jede quadratische Gleichung der Form:
ax2 +bx+c = 0
läßt sich in dieNormalform
x2 + px+q = 0
umwandeln.
Die Lösung einer in Normalform gegebener quadratischen Gleichung läßt sich mit der
p-q-Formel berechnen:
x1/2 =− p2±
√( p2
)2−q
Eine quadratische Gleichung besitzt je nach dem Zahlenwert unter der Wurzel:
(1) (p2)2−q > 0 2 Lösungen
(2) (p2)2−q = 0 1 Lösungen
(3) (p2)2−q < 0 keine reellen Lösungen
Graphische Lösung quadratischer Gleichungen
1. Möglichkeit:
Man zeichnet die zugehörige Parabel und liest die Nullstellen ab.
2. Möglichkeit:
Man bringt das quadratische Glied allein auf eine Seite
x2 =−px−q
und zeichnet
y = x2 und y =−px−q
Die Schnittstellen beider Kurven sind dann die Nullstellen.
40

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Beispiel:
y = x2 +x−2
−6 −4 −2 0 2 4 6−4
−2
0
2
4
6
8
10
y=x2
y=x2+x−2
y= −x+2
(−2,4)
(1,1)
2.5.5 Ganzrationale Funktionen
Eine Funktion der Form
f (x) = anxn +an−1xn−1 + · · ·+a2x2 +a1x+a0
mit an,an−1, · · · ,a1,a0 ∈R, an 6= 0
wird ganzrationale Funktion n-ten Gradesoder auchPolynomfunktion n-ten Grades
genannt.
Beispiele:
• f (x) = 2x5−3x4 +2x2 +3 Polynom 5. Grades
• f (x) = x3 + 23x2−5x+4 Polynom 3. Grades in Normalform
• f (x) = 2x4−7x3−5x+2 Polynom 4. Grades in Normalform
41

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
−8 −6 −4 −2 0 2 4 6 8−250
−200
−150
−100
−50
0
50
100
150
200
250
f(x)=2x5−3x4+2x2+3
f(x)=2x4−7x3−5x+2
f(x)=x3+ − x2−5x+4 23
Kurvenverlauf:
• Die Kurve verläuft durch den Punkt(0,a0).
• Die Funktion ist entweder nach unten oder nach oben beschränkt, fallsn gerade ist:
an > 0: nach unten beschränkt
an < 0: nach oben beschränkt
• Die Funktion ist nicht beschränkt, fallsn ungerade ist.
Bestimmung von Nullstellen:
(1) graphisch, indem man die Kurve der Funktion zeichnet und die Schnittpunkte an
derx-Achse abliest.
(2) Zwischen zweix-Werten, für die der eine Funktionswert positiv und der andere
negativ ist, liegt mindestens eine Nullstelle. Daher gibt es die Möglichkeit der
Intervallschachtelung.
Beispiel:
f (x) = x3−2x+3 f (−2) =−1, f (−1) = 4
⇒ im Intervall (-2,-1) liegt eine Nullstelle.
42

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
f (−1.5) = 2.625 −2 < x0 <−1.5
f (−1.75) = 1.140625 −2 < x0 <−1.75
f (−1.85) = 0.368375 −2 < x0 <−1.85
f (−1.9) =−0.059 −1.90< x0 <−1.85
f (−1.88) = 0.115328 −1.90< x0 <−1.88
f (−1.89) = 0.028731 −1.90< x0 <−1.89
f (−1.895) =−0.014992374 −1.895< x0 <−1.890
usw.
Merkregel:
Existiert bei Polynomen mit ganzzahligen Koeffizienten eine ganzzahlige
Nullstelle, so ist diese Teiler vona0.
Beispiel:
f (x) = x3 +6x2 +21x+26 26 hat die Teiler 1,2,3,13,26
f (1) = 54 f (−1) = 10
f (2) = 100 f (−2) = 0
f (13) = 3510 f (−13) =−1430
f (26) = 22204 f (−26) =−14040
⇒ x0 =−2 ist die Nullstelle.
(3) Für ein Polynom 2. Grades lassen sich die Nullstellen mit Hilfe der p-q-Formel
berechnen. Insbesondere läßt sich jedes Polynom der Form
f (x) = ax4 +bx2 +c
durch dieSubstitution t = x2 in die Form eines Polynoms 2. Grades bringen:
f (t) = at2 +bt+c
Polynomdivision
Ist fn(x) ein Polynom n-ten Grades, und istx0 eine Nullstelle vonfn(x) ohne Rest,
so ist fn(x) durch(x−x0) teilbar:
fn(x) = (x−x0) · fn−1(x)
Der Grad des Polynomsfn−1 ist um 1 niedriger als der vonfn(x).Man bestimmtfn−1(x) durch Polynomdivision.
43

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Beispiel:
fn(x) = x3−6x2 +11x−6 hat die Nullstellex0 = 1
(x3−6x2 +11x−6) : (x−1) = x2−5x+6
x2(x−1) −→ −(x3−x2)−5x2 +11x
−5x(x−1) −→ −(−5x2 +5x)6x−6
(6x−1) −→ −(6x−6)0
⇒ f (x) = (x−1) · (x2−5x+6)
Die weiteren Nullstellen lassen sich dann mit der p-q-Formel berechnen.
Die Betragsfunktion
Die Funktion
f : R→R+
x→ f (x) = |x|
heißtBetragsfunktion.
Man erhält die graphische Darstellung des Betrages einer Funktion| f (x)|, indem
man alle Punkte der graphischen Darstellung vonf (x) die unterhalb derx-Achse liegen
an dieser spiegelt.
44

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
−6 −4 −2 0 2 4 6−5
0
5
10
15
f(x)=|x+1|+|x−1|+|x|
f(x)=|x2−2|
f(x)=x2−2
2.5.6 Gebrochenrationale Funktionen
Jede Funktion, deren Funktionsgleichung sich auf die Form
f (x) =g(x)h(x)
=anxn +an−1xn−1 + · · ·+a1x+a0
bmxm+bm−1xm−1 + · · ·b1x+b0
mit g(x),h(x) ganzrationale Funktionen n-ten, bzw. m-ten Grades
bringen läßt, heißtgebrochen rationale Funktion.
Es werden die beiden Fälle unterschieden:
n≥m: unecht gebrochenrational
n < m: echt gebrochenrational
Unecht gebrochenrationale Funktionen lassen sich durch Polynomdivision auf die Form
f (x) =g(x)h(x)
= f ′(x)+g′(x)h(x)
bringen, wobei
f ′(x) ganzrationale Funktion
g′(x)h(x)
echt gebrochenrationale Funktion.
Definitionsbereich: i.A.R ohne die Nullstellen des Nenners.
45

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Definition:
Die reelle Zahl xp heißt Pol (bzw. Polstelle) einer gebrochenrationalen Funtion
f (x) = g(x)h(x) , falls
h(xp) = 0 und g(xp) 6= 0.
An den Polstellen ist der Funktionswert nicht definiert. In der Umgebung der Polstelle
wächst der Funktionswert über alle Grenzen.
Beispiel:
f (x) =x2−1
x3 +x2−8x−12hat die Polstellenxp1 = 3 undxp2 =−2
g(3) = 9−1 = 8 g(−2) = 4−1 = 3
h(3) = 27+9−24−12= 0
h(−2) =−8+4+16−12= 0
−10 −8 −6 −4 −2 0 2 4 6 8 10−6
−4
−2
0
2
4
6
x2−1
Asymptote Pol
f(x)= x3+x2−8x−12
Pol
Nullstellen gebrochenrationaler Funktionen
Die reelle Zahlx0 ist die Nullstelle vonf (x) = g(x)h(x) , falls
g(x0) = 0 und h(x0) 6= 0
→ Reduktion auf Nullstellenbestimmung von ganzrationalen Funktionen.
46

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Asymptoten gebrochenrationaler Funktionen
Als Asymptote einer gebrochenrationalen Funktionf (x) bezeichnet man diejenige
Funktiona(x), an die sich der Graph der Funktionf (x) für x→ ±∞ anschmiegt bzw.
annähert. Es gilt:
(1) Für m= n ist die Geradef (x) = anbm
Asymptote
(2) Für n < m ist diex-Achse Asymptote
(3) Für n > m ist nach Polynomdivisionf (x) = g(x)h(x) = f ′(x)+ g′(x)
h(x) die ganzrationale
Funktion f ′(x) Asymptote.
−50 −40 −30 −20 −10 0 10 20 30 40 50−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
f(x)= 2x2+3x+1
x2+1
Asymptote f(x) = = 2 a
n
bm
47

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
−10 −8 −6 −4 −2 0 2 4 6 8 10−20
−16
−12
−8
−4
0
4
8
12
16
20
f(x) = 3x2 − 4x + 3
x − 1
= 3x − 1 + 2
x − 1
Asymptote
f(x) = 3x − 1
Pol
−12 −8 −4 0 4 8 12−10
−5
0
5
10
15
f(x) = x3 − 4x + 8
4x − 8
2 =
4
x2 + 2x
Asymptote
Pol
x − 2
f(x) =
+ 4
x2 + 2x
48

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
2.5.7 Bruch- und Wurzelgleichungen
Bruchgleichungen
Bei Bruchgleichungen lassen sich die Brüche sofort beseitigen, indem man beide
Seiten mit dem Hauptnenner multipliziert.
Rechenweg:
1. Bestimmung des Hauptnenners
2. Multiplikation mit dem Hauptnenner ergibt eine ganzrationale Gleichung
3. Klammern auflösen, ordnen, zusammenfassen
4. Gleichung nachx auflösen
5. Probe
Beispiel:10−x
3+
13+x7
+17+4x
21=
7x+26x+21
,x 6=−21
Hauptnenner links: 21 ⇒ 7·10−7x+13·3+3x+17+4x21
=7x+26x+21
⇒ 0 =−6(x+21)x+21
+7x+26x+21
Hauptnenner rechts: (x+21) ⇒ 6 =7x+26x+21
⇒ 0 =−6x−126+7x+26
x+21
⇒ 0 =x−100x+21
⇒ 0 = x−100 ⇒ x = 100
Probe:10−100
3+
13+1007
+17+400
21= 6 =
700+26100+21
√
Wurzelgleichungen
Bei Wurzelgleichungen lassen sich die Wurzeln sofort beseitigen, indem man die
Gleichung entsprechend potenziert.
Rechenweg:
1. Wurzeln isolieren bzw. gleichverteilen
2. Potenzieren der Gleichung (notfalls mehrmals)
3. Klammern auflösen
4. Probe
49

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Beispiel:4√
x2 +3x+9−√
x+2 = 0 ,x≥−2
Quadrieren ⇒√
x2 +3x+9 = x+2
Nochmals quadrieren ⇒ x2 +3x+9 = (x+2)2
⇒ x2 +3x+9 = x2 +4x+4
⇒ x = 5
Probe: 4√
52 +3·5+9 =√
7 =√
5+2√
2.5.8 Transzendente Funktionen
Exponentialfunktionen
Eine Funktion mit der Funktionsgleichung
f : R→R+
x→ f (x) = ax a∈R
heißtExponentialfunktion .
Eigenschaften
• Alle Graphen haben einen gemeinsamen Punkt
(0,1) für f (x) = ax
(0,−1) für f (x) =−ax
• Die Funktionen besitzen keine Nullstellen.
• Die x-Achse ist Asymptote.
• Bei der Funktionf (x) = b·ax verschiebt sich dery-Achsenschnittpunkt nach(0,b).
50

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Beispiel:
−4 −3 −2 −1 0 1 2 3 4−2
0
2
4
6
8
10
f(x) = e−x
f(x) = 3ex
f(x) = e2x
f(x) = ex
Die dargestellte Exponentialfunktionen mit derEulerschen Zahl eals Basis spielen in
der Mathematik eine besondere Rolle (Siehe hierzu auch Abschnitt3.9.1auf Seite71).
Die Eulersche Zahl e ist definiert als:
e=∞
∑n=0
1n!' 2,718 281 828. . .
Logarithmusfunktionen
Eine Funktion mit der Funktionsgleichung
f : R+→R
x→ f (x) = logax a∈R
heißtLogarithmusfunktion .
51

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Die Logarithmusfunktion ist die Umkehrfunktion der zugehörigen Exponentialfunktion.
Eigenschaften:
• Alle Graphen haben den gemeinsamen Punkt(1,0).• Alle Logarithmusfunktionen haben einen Pol an der Stellexp = 0.
• Sie sind streng monoton.
−1 0 1 2 3 4−6
−4
−2
0
2
f(x) = lb(x)
f(x) = ln(x)
f(x) = lg(x)
wobei
• log10 → lg
• loge → ln
• log2 → lb
(vergleiche auch Seite18)
2.5.9 Exponentialgleichungen und logarithmische Gleichungen
Exponentialgleichungen
Exponentialgleichungen können nach entsprechender Umformung durch Exponen-
tenvergleich, Logarithmierung oder Substitution gelöst werden.
Exponentenvergleich: ax = ap ⇔ x = p
52

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Logarithmieren: ax = bp ⇔ lg(ax) = lg(bp)⇔ x · lg(a) = p· lg(b)⇔ x = p·lg(b)
lg(a)
Substitution: b·a2x +c·ax +d = 0
t = ax b· t2 +c· t +d = 0
→ Rückführung auf eine quadratische Gleichung
Logarithmische Gleichungen
1. Gleichungen der Form loga f (x) = b ⇔ aloga f (x) = ab
haben die Lösung f (x) = ab, f (x) > 0
2. Gleichungen der Form loga f1(x) = loga f2(x)haben die Lösung f1(x) = f2(x)
3. Gleichungen der Form loga f1(x) = logb f2(x)
lassen sich umrechnen in logb f1(x) =1
logablogb f2(x) und damit auf den
2. Fall zurückführen
53
3 Trigonometrische Funktionen
3.1 Winkeleinheiten
Gradmaß
1 Vollkreis = 360o Grad
1o= 60′ Minuten
1′= 60′′ Sekunden
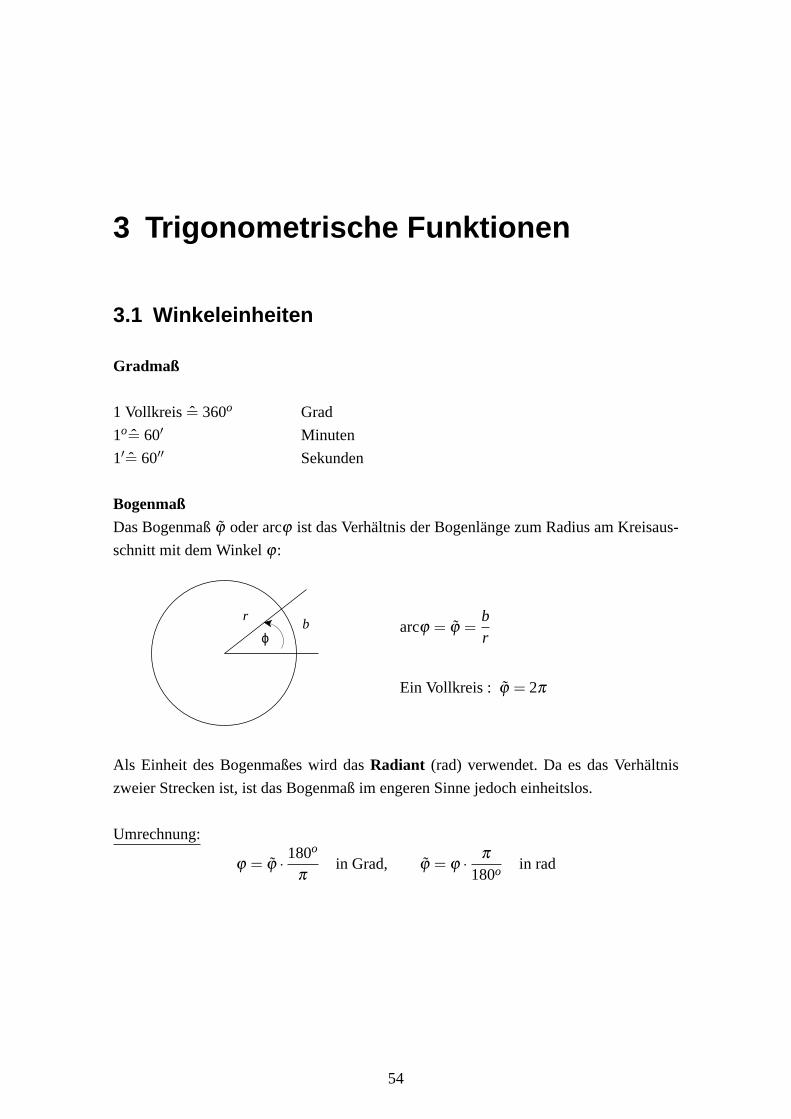
Bogenmaß
Das Bogenmaßϕ oder arcϕ ist das Verhältnis der Bogenlänge zum Radius am Kreisaus-
schnitt mit dem Winkelϕ:
ϕ
rb arcϕ = ϕ =
br
Ein Vollkreis : ϕ = 2π
Als Einheit des Bogenmaßes wird dasRadiant (rad) verwendet. Da es das Verhältnis
zweier Strecken ist, ist das Bogenmaß im engeren Sinne jedoch einheitslos.
Umrechnung:
ϕ = ϕ · 180o
πin Grad, ϕ = ϕ · π
180o in rad
54

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
3.2 Recht- und schiefwinklige Dreiecke
Rechtwinklige Dreiecke
Diejenige Seite eines rechtwinkligen Dreiecks, die dem rechten Winkel gegenüber
liegt, heißt Hypotenuse, die beiden anderen Seiten, die den rechten Winkel bilden,
werdenKatheten genannt.
Für das rechtwinklige Dreieck gilt derSatz des Pythagoras, der besagt, daß die
Summe der Quadrate der Kathetena undb gleich dem Quadrat der Hypotenusec ist:
a2 +b2 = c2
Die FlächeA des rechtwinkligen Dreiecks berechnet sich nach der Formel
A =12
a·b
α
β .
cb
a
sinα =ac
cosα =bc
tanα =ab
cotα =ba
Schiefwinklige Dreiecke
Sinussatz(siehe auch Seite69):
α β.
γ
h
c
ab
C
A B
c
sin(α) =hc
b
sin(β ) =hc
a
⇒ sin(α) ·b = sin(β ) ·a
Es ergibt sich derSinussatz:
asinα
=b
sinβ=
csinγ
55

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Cosinussatz:(siehe auch Seite70)
c
ch
B
a
A
b
. α
γ
β
C
Es gilt:
a2 = b2 +c2−2bccosα
b2 = a2 +c2−2accosβ
c2 = a2 +b2−2abcosγ
56

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
3.3 Definition der trigonometrischen Funktion am
Kreis
r
y-Achse
x-Achsex
yϕ
sinϕ =yr
cosϕ =xr
tanϕ =yx
cotϕ =xy
Speziellr = 1 (Einheitskreis):
1
y-Achse
x-Achsex
yϕ
sinϕ =y1
= y
cosϕ =x1
= x
tanϕ =yx
cotϕ =xy
57

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
3.4 Graphen der trigonometrischen Funktionen
Sinus:
f : R→ [−1,1]
x→ f (x) = sin(x)
Cosinus:
f : R→ [−1,1]
x→ f (x) = cos(x)
−3 −2 −1 0 1 2 3
−1
−0.5
0
0.5
1
π
cos x
sin x
π π π π π π
58

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Tangens:
f : R \{(2n+1)π
2 | n∈Z} →R
x → f (x) = tan(x)
−3 −2 −1 0 1 2 3−10
−8
−6
−4
−2
0
2
4
6
8
10
π
f(x) = tan x
π π π π π π
Cotangens:
f : R \{nπ| n∈Z} →R
x → f (x) = cot(x)
−3 −2 −1 0 1 2 3−10
−8
−6
−4
−2
0
2
4
6
8
10
π
f(x) = cot x
π π π π π π
59

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Periodizität der trigonometrischen Funktionen
Periode 2π: sin(x+k ·2π) = sinx
cos(x+k ·2π)= cosx
Periodeπ: tan(x+k ·π) = tanx
cot(x+k ·π) = cotx
Spezielle Funktionswerte
x 0, 2ππ
6,
56
ππ
4,
34
ππ
3,
23
ππ
2π
32
π
0o, 360o 30o, 150o 45o, 135o 60o, 120o 90o 180o 270o
f (x)
sin(x) 012
12
√2
12
√3 1 0 -1
cos(x) 1 ±12
√3 ±1
2
√2 ±1
20 -1 0
tan(x) 0 ±13
√3 ±1 ±
√3 ∞ 0 ∞
cot(x) ∞ ±√
3 ±1 ±13
√3 0 ∞ 0
Beziehungen zwischen den Winkelfunktionen
sinx = cos(
π
2−x
)tanx = cot
(π
2−x
)cosx = sin
(π
2−x
)cotx = tan
(π
2−x
)tanx ·cotx = 1 1+ tan2x =
1cos2x
60

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
sin2x+cos2x = 1 Trigonometrischer Pythagoras
tanx =sinxcosx
cotx =cosxsinx
Man kann jede Funktion durch die anderen ausdrücken, z.B.:
cosx =± cotx√1+cot2x
3.5 Additionstheoreme
α
β
E
A B
CD
Oα
sin(α +β ) =AE
OE
=AD+DE
OE=
BC+DE
OE
=BC
OE+
DE
OE
=BC
OC· OC
OE+
EC
OE· DE
EC
= sinα ·cosβ +sinβ ·cosα
Analog ergibt sich:
sin(α±β ) = sinα cosβ ±cosα sinβ
cos(α±β ) = cosα cosβ ∓sinα sinβ
tan(α±β ) =tanα± tanβ
1∓ tanα tanβ
cot(α±β ) =cotα cotβ ∓1cotβ ±cotα
61

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Vielfache eines Winkels
Aus den Additionstheoremen ergibt sich fürα = β :
sin(2α) = 2sinα cosα
cos(2α) = cos2α−sin2α
tan(2α) =2tanα
1− tan2α
cot(2α) =cot2α−1
2cotα
Setzt man in den Additionstheoremenβ = 2α,3α, . . . so ergeben sich entsprechende
Formeln für sin(3α),sin(4α) usw.
→ Formelsammlung
Produkte trigonometrischer Funktionen
sinα ·sinβ =12
cos(α−β )− 12
cos(α +β )
cosα ·cosβ =12
cos(α−β )+12
cos(α +β )
sinα ·cosβ =12
sin(α−β )+12
sin(α +β )
Potenzen trigonometrischer Funktionen
sin2x =1−cos(2x)
2cos2x =
1+cos(2x)2
sin3x =3sinx−sin(3x)
4cos3x =
3cosx+cos(3x)4
sin4x =3−4cos(2x)+cos(4x)
8cos4x =
3+4cos(2x)+cos(4x)8
62

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
3.6 Goniometrische Gleichungen
Die Auflösung der goniometrischen Gleichungen (Gleichungen, die die Winkelfunktio-
nen enthalten) kann man in 5 Schritte aufgliedern:
1. Vereinheitlichung der Argumente
2. Vereinheitlichung der Funktionstypen
3. Substitution der übriggebliebenen Winkelfunktion
4. Lösen der algebraischen Gleichung und anschließende Berechnung des Winkels
5. Probe
Beispiel:
Für
sinx+sin(
x+π
2
)= 0
wird eine Lösung im Hauptwertebereich
x∈ [0,2π) bzw. x∈ [0◦,360◦)
gesucht:
Schritt 1: nach dem Additionstheorem gilt:
sinx+sinxcos(
π
2
)+cosxsin
(π
2
)= 0
⇒ sinx+cosx = 0
Schritt 2: ⇒ sinx =−cosx
⇒ tanx =−1
Schritt 3 und 4: ⇒ x = 135◦ oder 315◦
Schritt 5: sin135◦+sin(135◦+90◦) = 0√
sin315◦+sin(315◦+90◦) = 0√
⇒ x = 135◦ bzw. x = 34π und x = 315◦ bzw. x = 7
4π sind Lösungen im Hauptwerte-
bereich;
oder allgemein:
x =34
π +2kπ und x =74
π +2kπ k∈Z
63

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
3.7 Zyklometrische Funktionen
Die Umkehrfunktionen der trigonometrischen Funktionen heißenzyklometrische
Funktionen.
Man bezeichnet mity = arcsinx die Umkehrfunktion zu der auf[−π
2 , π
2 ] eingeschränkten
Funktiony = sinx und nennt arcsin denarcussinus vonx:
f : [−1,1]→ [−π
2,π
2]
x→ y = arcsinx
Umkehrfunktion zuy = cosx:
f : [−1,1]→ [0,π]
x→ y = arccosx
Umkehrfunktion zuy = tanx:
f : R→ [−π
2,π
2]
x→ y = arctanx
Umkehrfunktion zuy = cotx:
f : R→ [0,π]
x→ y = arccotx
64

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Es gilt also:
arcsin(sinx) = x
arccos(cosx) = x
arctan(tanx) = x
arccot(cotx) = x
und
sin(arcsinx) = x
cos(arccosx) = x
tan(arctanx) = x
cot(arccotx) = x
Graphische Darstellung:
π ππ
π
y = arcsin x
0
0.5
−0.5 0
y = sin x
0.5−0.5
65

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
π π
π
π
y = cos x
0
−1
0
0.5
y = arccos x
0.5 −1
π π π ππ
π
π
π
y = arctan x
y = tan x
0 0.5 −0.5
0.5
−0.5
0
66

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
π π π ππ
π
π
π
y = arcot x
y = cot x
0 0.5 −0.5
0.5
−0.5
0
Spezielle Werte:
f (x)\x -1 −12
√3 −1
2
√2 −1
20
12
12
√2
12
√3 1
arcsin −π
2−π
3−π
4−π
60
π
6π
4π
3π
2
arccos π56
π34
π23
ππ
2π
3π
4π
60
f (x)\x −√
3 -1 −13
√3 0
13
√3 1
√3
arctan −π
3−π
4−π
60
π
6π
4π
3
arccot56
π34
π23
ππ
2π
3π
4π
6
67

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Es gilt:
arcsinx+arccosx =π
2∀−1≤ x≤ 1
arccotx+arctanx =π
2
arccotx = arctan1x
∀ x > 0
arcsinx = arctanx√
1−x2∀ |x|< 1
arccotx = arccosx√
1+x2
arctanx = arcsinx√
1+x2
arccosx = arccotx√
1−x2∀|x|< 1
Arcusfunktionen negativer Argumente:
y = arcsin(−x) =−arcsinx
y = arccos(−x) = π−arccosx
y = arctan(−x) =−arctanx
y = arccot(−x) = π−arccotx
Die zyklometrischen Additionstheoreme folgen aus den Additionstheoremen für trigono-
metrische Funktionen:
arcsinx1 +arcsinx2 =
arcsinz ∀ x21 +x2
2 ≤ 1 ∨ x1x2 ≤ 0
π−arcsinz ∀ x21 +x2
2 > 1 ∧ x1 > 0∧x2 > 0
−π−arcsinz ∀ x21 +x2
2 > 1 ∧ x1 < 0∧x2 < 0
mit z= x1
√1−x2
2 +x2
√1−x2
1
weitere Formeln: Formelsammlung
68

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
3.8 Berechnungen am Dreieck
3.8.1 Rechtwinklige Dreiecke
α
β .
cb
a
sinα =ac
cosα =bc
tanα =ab
cotα =ba
a2 +b2 = c2 A =12
ab
sinβ =bc
cosβ =ac· · ·
3.8.2 Schiefwinklige Dreiecke
Sinussatz:
α β.
γ
h
c
ab
C
A B
c
sinα =hc
b
sinβ =hc
a
⇒ bsinα = asinβ
Es ergibt sich:
asinα
=b
sinβ=
csinγ
69

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Cosinussatz:
c
ch
B
a
A
b
. α β
C
|
| |
|
p
q
γ
a2 = h2c +q2
h2c = b2− p2
⇒ a2 = b2 +q2− p2
p = c+q
⇒ a2 = b2 +(c+q)2−q2
= b2 +c2 +2cq+q2−q2
= b2 +c2 +2cq
da
qb
= cos(180◦−α)
= −cosα
→ q = −bcosα
⇒a2 = b2 +c2−2bccosα
b2 = a2 +c2−2accosβ
c2 = a2 +b2−2abcosγ
70

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
3.9 Näherungsformel für trigonometrische Funktionen
sinx = x− x3
3!+
x5
5!− x7
7!± . . . x∈R
cosx = 1− x2
2!+
x4
4!− x6
6!± . . . x∈R
tanx = x+13
x3 +215
x5 +17315
x7 + . . . x∈R, |x|< π
2
cotx =1x− 1
3x− 1
45x3− 2
945x5− . . . x∈R, 0 < |x|< π
arcsinx = x+12· x3
3+
1·32·4
· x5
5+
1·3·52·4·6
· x7
7+ . . . x∈R, |x|< 1
arccosx =π
2−x− 1
2x3
3− 1·3
2·4· x5
5− . . . x∈R, |x|< 1
arctanx = x− x3
3+
x5
5− x7
7± . . . x∈R, |x| ≤ 1
arccotx =π
2−x+
x3
3− x5
5+
x7
7± . . . x∈R, |x| ≤ 1
Für kleine Winkel gilt insbesondere:
sinx ≈ x ≈ tanx
cosx ≈ 1
3.9.1 Zusammenhang der trigonometrischen Funktionen mit der
Exponentialfunktion
Eulersche Formeln:
y = ejϕ = cosϕ + j sinϕ
y = e− jϕ = cosϕ− j sinϕ
71

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Mit Hilfe der Eulerschen Formeln lassen sich komplexe Zahlen relativ einfach darstellen:
-ra ϕ= cos
= sinϕ
= tan ϕba
2 2
-br
2= a + br
-
r 2
z = a + jb1b
2a
b2
a1
Re(z)
Im(z)
r 1
ϕ2 ϕ
1
1 1 1
2 2 2z = a + jb
IV
I
III
II
z = a+ jb Kartesische Form
= r cosϕ + jr sinϕ
= r(cosϕ + j sinϕ) Goniometrische Form
= re jϕ Exponentialform
Bei der Überführung einer komplexen Zahl in die goniometrische Form oder in die
Exponentialform sind besonders bei der Bestimmung des Winkelsϕ die entsprechenden
Vorzeichen zu beachten:
a b z liegt im ϕ liegt zwischen tanϕ
positiv positiv I. Quadranten 0◦ und 90◦ positiv
negativ positiv II. Quadranten 90◦ und 180◦ negativ
negativ negativ III. Quadranten 180◦ und 270◦ positiv
positiv negativ IV. Quadranten 270◦ und 360◦ negativ
a = 0 ⇒ ϕ = 90◦ falls b > 0
ϕ = 270◦ falls b < 0
72

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
b = 0 ⇒ ϕ = 0◦ falls a > 0
ϕ = 180◦ falls a < 0
Hauptwertebereich für ϕ : 0◦ bis 360◦
bzw. 0 bis 2π
Multiplikation komplexer Zahlen in Exponentialform
Seienz1 = r1 ejϕ1 undz2 = r2 ejϕ2
z1z2 = r1ejϕ1r2ejϕ2
= r1r2ejϕ1ejϕ2
= r1r2ej(ϕ1+ jϕ2)
= r1r2ej(ϕ1+ϕ2)
Beispiel:
z1
z2
z
15°
45°
60°
15°
Im(z)
Re(z)
3
1.5
4.5
z1 = 3 ej45◦ z2 = 1.5 ej15◦
z = z1z2
= 3 ej45◦1.5 ej15◦
= 3·1.5 ej45◦ej15◦
⇒ z= 4.5 ej60◦
Der Zeigerz1 wird um den Winkelϕ = 15◦ gedreht und um den Faktor 1.5 gestreckt.
Division komplexer Zahlen in Exponentialform
z1 undz2 seien definiert wie gehabt, dann gilt:
z1
z2=
r1ejϕ1
r2ejϕ2=
r1
r2ej(ϕ1−ϕ2)
73

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Beispiel:
z1
z2
Im(z)
45°2.5
5
Re(z)
45°
75°
z
2
120°
z1 = 5 ej120◦ z2 = 2.5 ej45◦
z =z1
z2
=5 ej120◦
2.5 ej45◦
=5
2.5ej(120◦−45◦)
⇒ z= 2 ej75◦
Die komplexe Zahlz1 wird um den Winkelϕ =−45◦ gedreht und um den Faktorr2 = 2.5
gestaucht.
Potenzieren komplexer Zahlen in Exponentialform
z = re jϕ
⇒ zn = (re jϕ)n
= rn(ejϕ)n
⇒ zn = rnejnϕ
= rn(cos(nϕ)+ j sin(nϕ))
Beispiel:
z5 = (1− j√
3)5
umschreiben in Exponentialform:
r =√
12 +√
32=√
1+3 =√
4 = 2
tanϕ =−√
31
=−√
3 ϕ′ =−60◦
a > 0, b < 0 ⇒ IV. Quadrant
⇒ ϕ = 360◦+ϕ′ = 300◦
⇒ z= 1− j√
3 = 2ej300◦
also
z5 = (2ej300◦)5 = 25 ej1500◦ |1500◦ = 4·360◦+60◦
⇒ z5 = 32ej60◦
74

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
3.10 Die Hyperbelfunktionen
y = sinhx =ex−e−x
2D = R W = R
y = coshx =ex +e−x
2D = R W = [1,∞)
y = tanhx =sinhxcoshx
=ex−e−x
ex +e−x D = R W = (−1,1)
y = cothx =coshxsinhx
=ex +e−x
ex−e−x D = R\{0} W = R\[−1,1]
Graphische Darstellung:
−3 −2 −1 0 1 2 3−3
−2
−1
0
1
2
3
4
−3 −2 −1 0 1 2 3−3
−2
−1
0
1
2
3
4
y = coth x
y = tanh x
y = cosh x y = sinh x
Beziehungen zwischen den Hyperbelfunktionen:
ex = sinhx+coshx
e−x = coshx−sinhx
cosh2x−sinh2x = 1
tanhxcothx = 1
75

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
sinh(−x) =−sinhx ungerade Funktion
cosh(−x) = coshx gerade Funktion
tanh(−x) =− tanhx ungerade Funktion
coth(−x) =−cothx ungerade Funktion
Additionstheoreme
sinh(x±y) = sinhxcoshy±coshxsinhy
cosh(x±y) = coshxcoshy±sinhxsinhy
sinh(2x) = 2sinhxcoshx
cosh(2x) = cosh2x+sinh2x
Beziehung zwischen Einheitskreis und Hyperbelfunktionen
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
−2 −1 0 1 2−1.5
−1
−0.5
0
0.5
1
1.5
cot t
tan t
sin t
cos t
P
coth t
sinh t
tanh t
cosh t
P
x = cost
y = sint
x2 +y2 = cos2 t +sin2 t = 1
⇒ x2 +y2 = 1
Kreisgleichung
x = cosht
y = sinht
x2−y2 = cosh2 t−sinh2 t = 1
⇒ x2−y2 = 1
Hyperbelgleichung
76

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
3.11 Die Areafunktionen
Um die Umkehrfunktion der Hyperbelfunktionen zu bilden, führt man ein weiteres neues
Funktionssymbol ein:
Die Umkehrfunktion zuy = sinhx ist:
y = arsinhx D = R W = R
(gelesen: area sinus hyperbolicus)
Entsprechend:
y = arcoshx D = [1,∞) W = [0,∞)y = artanhx D = (−1,1) W = R
y = arcothx D = (−∞,−1)∪ (1,∞) W = R\0
Graphische Darstellung:
−4 −2 0 2 4−3
−2
−1
0
1
2
3
−4 −2 0 2 4−3
−2
−1
0
1
2
3
y = arcosh x y = arsinh x
y = arcoth x
y = artanh x
Es gilt:
arsinh(sinhx) = sinh(arsinhx) = x
arcosh(coshx) = cosh(arcoshx) = x
artanh(tanhx) = tanh(artanhx) = x
arcoth(cothx) = coth(arcothx) = x
77

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Wichtige Zusammenhänge:
y = arsinhx = ln(x+√
x2 +1)
y = arcoshx =
ln(x+
√x2−1) x≥ 1, y > 0
ln(x−√
x2−1) x≥ 1, y < 0
y = artanhx =12
ln
(1+x1−x
)|x|< 1
y = arcothx =12
ln
(1+xx−1
)|x|> 1
78

4 Einführung in die Vektorrechnung
4.1 Geometrie von Vektoren
In der Ebene und im Raum lassen sich Vektoren geometrisch als gerichtete Strecken oder
Pfeile darstellen. Die Richtung des Vektors entspricht dann der Pfeilrichtung, sein Betrag
der Pfeillänge.
v➜
A
B
A: Anfangspunkt
B: Endpunkt
v: Länge des Vektors
~v: Vektor mit seiner Richtung
Vektoren heißenäquivalent, wenn ihre Länge und Richtung überein stimmen:
w➜
v➜
➜u
äquivalente Vektoren
Da man Vektoren meist ausschließlich durch Länge und Richtung charakterisiert,
betrachtet man äquivalente Vektoren alsgleich, auch wenn sie verschiedene Anfangs-
und Endpunkte haben:
~v = ~w =~z
Die Summev+ w zweier Vektoren~v und~w ist der folgendermaßen bestimmte Vektor:
Man ordne~v und ~w so an, daß der Anfangspunkt von~w mit dem Endpunkt von~v
zusammenfällt. Der Vektor~v+ ~w entspricht dann dem Pfeil vom Anfangspunkt von~v
79

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
zum Endpunkt von~w.
w➜
v➜
v➜
w➜
+
Summe~v+~w
w➜
v➜
v➜
w➜
+
w➜
v➜
w➜
v➜
+
~v+~w = ~w+~v
Der zu~v negative Vektor −v ist der Vektor mit dem gleichen Betrag wie~v, aber
entgegengesetzter Richtung:
v➜➜
-v
|
Für diesen Vektor gilt:~v+(−~v) =~0
Die Differenz v− w ist dann definiert als:
~v−~w =~v+(−~w)
v➜
w➜
v➜
w➜
-
w➜
-
w➜
-
v➜
w➜
v➜
w➜
-
Haben~v und~w denselben Anfangspunkt, so stellt der vom Endpunkt von~w zum Endpunkt
von~v gehende Vektor die Differenz~v−~w dar.
Das Produkt k v, k ∈ R ist der Vektor, dessen Länge sich als das|k|-fache der
Länge von~v ergibt; seine Richtung stimmt fürk > 0 mit der Richtung von~v überein, für
k < 0 ist sie entgegengesetzt.
v➜
➜-v v
➜
➜-3v v
➜
0.5
|
|
|
2
80

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Ein Vektor der Gestaltk~v heißt skalares Vielfaches von~v. Skalare Vielfache sind
parallele Vektoren.
Vektoren im Koordinatensystem
Bei der Behandlung von Vektoren erweist sich die Einführung rechtwinkliger Koordina-
ten oft als zweckmäßig.
Ebene (2–dimensionaler Raum)
Sei ~v ein Vektor in der Ebene, dessen Anfangspunkt im Ursprung eines rechtwink-
ligen Koordinatensystems liegt. Die Koordinaten(x1,y1) seines Endpunktes sind die
Komponenten vonv, was man als~v = (x1,y1) schreibt.
➜v
1y
1xx
y
0
Die Vektoraddition und Multiplikation mit einem Skalar lassen sich einfach auf die
Komponentenschreibweise übertragen:
v➜
w➜
+w➜
v➜
w➜
1x
v➜
w➜
+
y
x
1y
2y
2x
➜v
~v = (x1,y1)
~w = (x2,y2)
~v+~w = (x1 +x2,y1 +y2)
~v−~w = (x1−x2,y1−y2)
k~v = (kx1,ky1) k∈R
w➜
2y1y -
1y
2y
v➜
1x
-1 2xx2x
v➜
w➜
-
v➜
w➜
-
x
y
v➜
1x
➜vk.
➜vk.
1x.k
.k 1y
1y
x
y
81

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Raum (3–dimensionaler Raum)
Analog zur Beschreibung von Vektoren in der Ebene durch Zahlenpaare kann man
Vektoren im Raum nach der Einführung eines rechtwinkligen Koordinatensystems, durch
Tripel reeller Zahlen darstellen:
v➜
1x
1y
1z
x
z
y
P(x1,y1,z1) Punkt
~v = (x1,y1,z1) Vektor vom
Ursprung zum Punkt P
Liegt der Anfangspunkt eines Vektors~v im Ursprung, so nennt man die Koordinaten des
Endpunktes wiederKomponenten vonv:
~v = (x1,y1,z1)
Es gilt dann:
~v = (x1,y1,z1)
~w = (x2,y2,z2)
~v+~w = (x1 +x2,y1 +y2,z1 +z2)
~v−~w = (x1−x2,y1−y2,z1−z2)
k~v = (kx1,ky1,kz1) k∈R
Der Anfangspunkt eines Vektors muß nicht unbedingt im Koordinatenursprung liegen.
Für den Vektor~v =−−→P1P2 mit dem AnfangspunktP1 = (x1,y1,z1) und dem EndpunktP2 =
(x2,y2,z2) ist
~v =−−→P1P2 = (x2−x1,y2−y1,z2−z1)
82

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
1 2PP
P2
(x ,y ,z )1 1 11P
OP2
x
y0
z
(x ,y ,z )2 2 2
OP1−−→P1P2 =
−−→OP2−
−−→OP1
−−→P1P2 = (x2,y2,z2)− (x1,y1,z1)−−→P1P2 = (x2−x1,y2−y1,z2−z1)
4.2 Norm (Betrag) eines Vektors
Die Norm eines Vektorsu, kurz |~u|, ist seine Länge. Nach dem Satz des Pythagoras gilt
für den ebenen Vektor:
1y
1x
➜u
|u|➜
x
y
0
~u = (x1,y1)
|~u|=√
x21 +y2
1
Ist~u = (x1,y1,z1) ein Vektor im Raum, so folgt durch zweifache Anwendung des Satzes
von Pythagoras:
1x
1y
1z
➜|u|
x
z
y
..
.
0
P
R
➜u
OR2 = x2
1 +y21
|~u|2 = OR2 +RP
2
RP= z1
|~u|=√
x21 +y2
1 +z21
Ein Vektor der Norm 1 heißtEinheitsvektor e.
Der Abstand zweier PunkteP1 = (x1,y1,z1) undP2 = (x2,y2,z2) im Raum ist die Norm
des Verbindungsvektors−−→P1P2:
d =√
(x2−x1)2 +(y2−y1)2 +(z2−z1)2
83

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Allgemein gilt:
Für~v 6=~0 ist1|~v|
~v ein Einheitsvektor.
Einheitsvektoren entlang der Koordinatenachse
➜
i
➜
k➜
j
1
1
1
x
y
z ~i = (1,0,0)~j = (0,1,0)~k = (0,0,1)
⇒~v = (x1,y1,z1)
= x1~i +y1~j +z1~k
4.3 Skalarprodukt von Vektoren
Seien~uund~vverschiedene Vektoren, die den gleichen Anfangspunkt besitzen. Als Winkel
zwischen~u und~v bezeichnet man den durch die gestrichelte Strecken~u und~v eingeschlos-
senen Winkelθ , der die Ungleichung 0≤ θ ≤ π erfüllt.
u➜
v➜
v➜
u➜
v➜
u➜
v➜
u➜
Θ
Θ Θ|
Θ
84

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Definition:
Seien~u und ~v zwei- oder dreidimensionale Vektoren, die den Winkelθ einschlie-
ßen. DasSkalarprodukt oderinnere euklidische Produkt~u~v ist definiert als:
~u~v =
|~u||~v|cosθ ,~u 6=~0∧~v 6=~0
0 ,~u =~0∨~v = 0
u➜
➜|u| Θcos v
➜
Θ
Berechnung des Skalarprodukts durch die Komponenten:
Seien~u = (x1,y1,z1) und ~v = (x2,y2,z2) von Null verschiedene Vektoren, die den
Winkel θ einschließen. Nach dem Cosinussatz (a2 = b2 +c2−2bccosα) gilt dann:
1 2PP
P2
(x ,y ,z )1 1 11P
u➜
v➜
x
y
z
(x ,y ,z )2 2 2Θ
| ~P1P2|2 = |~u|2 + |~v|2−2|~u||~v|cosθ
Umrechnung ergibt:
~u~v = x1x2 +y1y2 +z1z2
Winkelbestimmung:
85

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Für von~0 verschiedene Vektoren~u 6= 0 und~v 6= 0 gilt:
cosθ =~u~v|~u||~v|
Orthogonale Vektoren:
Zueinander senkrechte Vektoren heißenorthogonal. Zwei Vektoren~u,(~u 6= 0) und
~v,(~v 6= 0) sind genau dann orthogonal, wenn~u~v = 0 ist.
Schreibweise: ~u⊥~v
Orthogonalprojektionen:
In einer Reihe von Anwendungen interessiert man sich für die Zerlegung eines Vektors
~u in einen zu einem vorgegebenen Vektor~a parallelen und einem dazu senkrechten
Summanden.
➜u
➜u
➜u
➜a
➜u
➜u
➜a
➜u
➜u
➜u
➜u
➜a
Der Vektor~u‖ heißtVektorkomponente vonu entlang a. Der Vektor~u⊥ heißtVektor-
komponente vonu senkrecht zua.
Es gilt:
~u‖ =~u~a|~a|2
~a
~u⊥ =~u−~u‖ =~u− ~u~a|~a|2
~a
Die Norm der Vektorkomponenete erhält man nach:
|~u‖|=|~u~a||~a|
= |~u||cosθ |
|~u⊥|= |~u|sinθ
86

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
➜|u| Θsin
a➜
➜|u|
u➜
➜|u| Θcos−
u➜
➜|u|
➜|u| Θcos
➜|u| Θsin
a➜ ΘΘ
0≤ θ < π
2π
2 ≤ θ < π
4.4 Kreuzprodukt
Die Aufgabenstellung ist zu zwei gegebenen räumlichen Vektoren einen Dritten zu
finden, der auf den beiden Anderen senkrecht steht.
Definition:
Sind ~u = (x1,y1,z1) und ~v = (x2,y2,z2) Vektoren im Raum, so ist ihrKreuzpro-
dukt u× v definiert durch:
~u×~v = (y1z2−z1y2,z1x2−x1z2,x1y2−x2y1)
Es gilt:
~u×~v =−(~v×~u)
Die Richtung von~u×~v ergibt sich nach der
Rechten-Hand-Regel:
u➜
v➜
u➜
v➜
x
Θ
Zeigen die Finger der rechten Hand
von~u nach~v, so weist der Daumen
in Richtung~u×~v
Geometrische Interpretation des Kreuzproduktes
Seien~u und ~v Vektoren im Raum. Die Norm ihres Kreuzproduktes~u×~v hat eine
nützliche geometrische Bedeutung.
87

hochschule für angewandte wissenschaftenFACHBEREICH ELEKTROTECHNIK UND INFORMATIKhamburg
university of applied sciences
Es gilt:
|~u×~v|= |~u| · |~v| ·sinθ
v➜
➜|u| u
➜
➜|v| ΘsinΘ
➜|v|
A
C
B
A = |~u| · |~v| ·sinθ
Fläche des Parallelogramms
Sind~u und~v Vektoren im Raum, so entspricht|~u×~v| dem Flächeninhalt des von ihnen
aufgespannten Parallelogramms.
Enstsprechend ist der Flächeninhalt des DreicksABCbestimmt durch:
AABC =12· |~u| · |~v| ·sinθ
88