manual de uso del tinkercad - edurobotic de uso del t… · los elementos una vez que estamos...
TRANSCRIPT

MANUAL DE USO DEL TINKERCAD
Con este manual lo que trabajaremos es como realizar un robot usando la herramienta tinkercad y sus formas más
básicas, con las que construiremos poco a poco las diferentes partes que lo compondrán. La idea es realizar un robot
de aspecto humanoide, pero sin centrarnos demasiado en pequeños detalles, algo en lo que ya nos centraremos en
futuros manuales.
En primer lugar, lo que debemos tener antes de empezar a diseñar nada es que los robots, al igual que los humanos
tienen puntos donde los sus diferentes partes podrían doblarse llamadas articulaciones. De esta forma, expresado de
una manera simplificada y sencilla, podríamos plantear un pequeño boceto que nos podría servir de ejemplo o de guía.
Para comenzar con nuestro diseño, lo que haremos será entrar en el programa con una cuenta que habremos creado
y deberemos seleccionar la opción: CREAR UN DISEÑO.
Este será el entorno en el que trabajaremos y de ahora en adelante, crearemos nuestro robot usando los elementos
que tenemos en la parte derecha y que son figuras básicas.

Para trabajar y diseñar nuestro robot, es mejor hace piezas de menor tamaño ya que de ser más grandes, luego nos
resultará más difícil modificarlos u obtener una visión adecuada de lo que vamos construyendo. Al mismo tiempo, en
caso de desear imprimir nuestro robot, su gran tamaño representará una dificultad ya que no hay una impresora 3D
lo bastante grande.
En primer lugar comenzaremos colocando un cubo en el la plantilla: PLANO DE TRABAJO.
Si pulsamos el botón derecho del ratón sobre el plano de trabajo y lo movemos manteniendo pulsado el botón,
podremos variar la perspectiva.

Comenzaremos modificando el cubo para convertirlo en un prisma rectangular bajo con que crear el aspecto de un
pie. Para modificarlo hacemos clic sobre el cubo para que se nos muestren los puntos de modificación.
Los cuadrados de la base nos servirán para controlar el largo y el ancho de la figura. Mientras que el que se encuentra
en la parte superior se usa para controlar la altura de la figura.

Estos cambios que podemos hacer mediante los cuadrados con estimaciones hechas por nosotros mismos con el ratón,
también se pueden hacer mediante números, para que contengan exactamente las medidas que nos interesan. Para
esto, haremos clic en los cuadrados negros situados en el centro de cada arista de la forma geométrica.
Si al modificar la superficie o las dimensiones de un objeto queremos mantener las proporciones antes de usar el
cuadrado mantendremos pulsada la tecla shift.
Una vez que tengamos la base o pie para nuestro robot, lo que haremos será
comenzar con la pierna. Para ello usaremos un cubo al igual que hemos
hecho antes para crear el pie.
Modificaremos la forma de este cubo para darle una forma de un prisma
rectangular alargado y con un largo y un ancho inferior a la base del pie.
El problema con el que nos encontraremos ahora es que ambas figuras se
encuentran al mismo nivel, cuando a nosotros lo que nos interesa es que
esta última figura esté sobre el pie, a una altura más elevada. Para cambiar
la altura de una figura usaremos la flecha negra situada sobre la parte superior de esta.
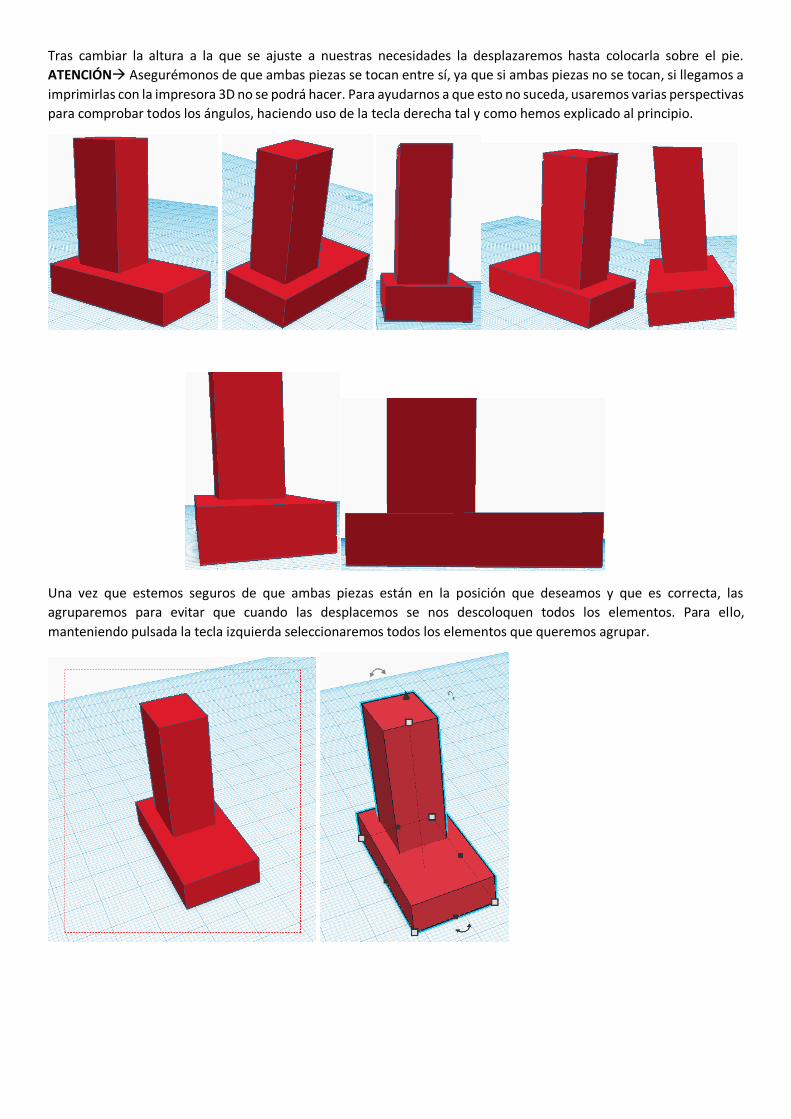
Tras cambiar la altura a la que se ajuste a nuestras necesidades la desplazaremos hasta colocarla sobre el pie.
ATENCIÓN Asegurémonos de que ambas piezas se tocan entre sí, ya que si ambas piezas no se tocan, si llegamos a
imprimirlas con la impresora 3D no se podrá hacer. Para ayudarnos a que esto no suceda, usaremos varias perspectivas
para comprobar todos los ángulos, haciendo uso de la tecla derecha tal y como hemos explicado al principio.
Una vez que estemos seguros de que ambas piezas están en la posición que deseamos y que es correcta, las
agruparemos para evitar que cuando las desplacemos se nos descoloquen todos los elementos. Para ello,
manteniendo pulsada la tecla izquierda seleccionaremos todos los elementos que queremos agrupar.

Una vez seleccionado todo, escogeremos la opción agrupar, situada en la parte superior.
Ahora que ya tenemos agrupado nuestras dos primeras piezas comenzaremos con la tercera, que será la articulación
de nuestro robot. Es decir el equivalente humano de la rodilla. Para esto, emplearemos la figura del cilindro.
La posición por defecto de esta figura nos plantea un
problema, ya que se encuentra justo en la posición contraria
a la que nosotros necesitamos. Para cambiar la posición hasta
conseguir la que nosotros necesitamos vamos a usar las
opciones de inclinación que se controla con las flechas dobles
con una ligera curvatura.
Para controlar la inclinación y dejar el cilindro en
posición horizontal usaremos las flechas de la parte
superior. Al seleccionarlas, nos aparecerá un indicador
de grados, que deberemos desplazar hacia la derecha
hasta alcanzar -90º.

Ahora que ya tenemos el cilindro en la posición deseada, modificaremos su tamaño y posición, haciéndolo más
pequeño (mejor si mantenemos la relación de aspectos SHIFT mientras cambiamos el tamaño) y subiéndolo hasta
colocarlo sobre la pierna.
Después, al igual que hemos hecho antes, los agruparemos.
El siguiente paso que debemos dar es añadir la siguiente parte de la pierna de nuestro robot, que correspondería al
muslo y que colocaremos justo sobre la articulación que acabamos de terminar. Para hacer esto, repetiremos el
procedimiento que hemos realizado antes con un prisma alargado. Finalizaremos agrupando todos los elementos en
uno solo.
Ahora que ya tenemos una pierna completa la duplicaremos para tener las dos. Al haber agrupado las cuatro piezas
que componen esta pierna, nos resultará mucho más sencillo.

El siguiente paso será crear el cuerpo. Será simplemente un gran bloque situado sobre las piernas. Es importante que
se queden al mismo nivel y en contacto por si queremos imprimir nuestro robot. Recordar la importancia de agrupar
los elementos una vez que estamos seguros de que la posición en la que se encuentran nuestras piezas es correcta.
Ahora pasaremos a crear la cabeza de nuestro robot. De momento simplemente colocaremos la cabeza y dejaremos
los detalles para los últimos pasos de esta actividad. La cabeza será una figura parecida a un cuadrado o rectángulo.

El siguiente paso que daremos será el de crear los brazos. Crearemos un brazo con dos cubos y luego lo duplicaremos.
El siguiente paso será antes de colocarlos crear un pequeño rectángulo para hacer de hombreras y que imite la
articulación del hombro. En las siguientes imágenes se detalla el proceso. Creamos solo uno de cada y luego lo
duplicaremos para ahorrar trabajo. Una vez más es importante agrupar los diferentes elementos, como las dos figuras
que componen el brazo.
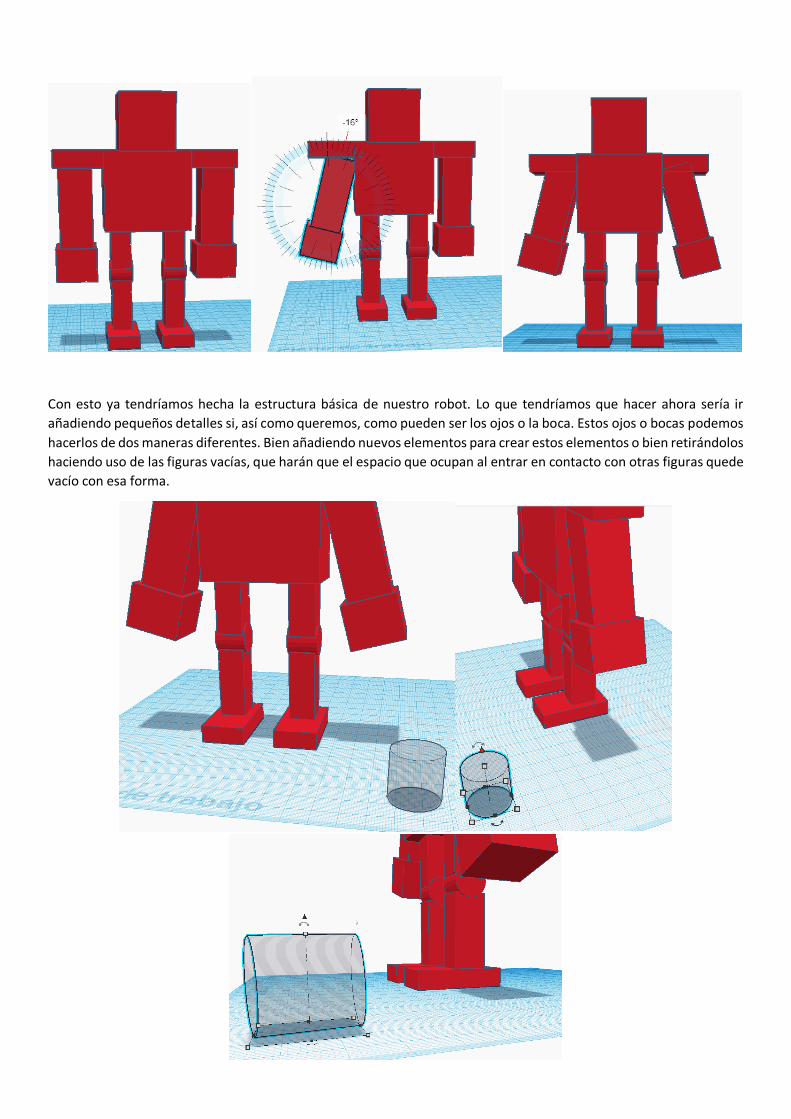
Con esto ya tendríamos hecha la estructura básica de nuestro robot. Lo que tendríamos que hacer ahora sería ir
añadiendo pequeños detalles si, así como queremos, como pueden ser los ojos o la boca. Estos ojos o bocas podemos
hacerlos de dos maneras diferentes. Bien añadiendo nuevos elementos para crear estos elementos o bien retirándolos
haciendo uso de las figuras vacías, que harán que el espacio que ocupan al entrar en contacto con otras figuras quede
vacío con esa forma.

