laboratorio control
DESCRIPTION
laboratorioTRANSCRIPT

CONTROL I 1
PRACTICA DE LABORATORIO IIMODELADO MATEMATICO DE SISTEMAS DINAMICOS(SISTEMA DE NIVEL DE LIQUIDOS)
NOTA
I. OBJETIVOSDeterminar los modelos matemáticos de cada uno de los equipos que intervienen en el sistema dinámico que se explican en esteLaboratorio.
II. COMPLEMENTO TEORICO Sistema de nivel de líquidoA continuación obtendremos modelos matemáticos de sistema de nivel de líquido. Si se introduce el concepto de resistencia para talesSistemas de nivel de líquido, es posible describir en formas simplesLas características dinámicas de tales sistemas.
Caudal de sistemas del nivel de líquidoEl caudal o la velocidad del flujo Q se define como el volumen en el tanque durante un determinado tiempo T; es decir:
Resistencia de sistemas del nivel de líquidoLa resistencia R para el flujo del líquido en tal tubo se define como el cambio de la diferencia de nivel (la diferencia en el nivel de líquidoen los dos tanques) necesaria para producir un cambio de una unidad en la velocidad del flujo; es decir:

CONTROL I 2
Sistemas de nivel de líquido con iteración.
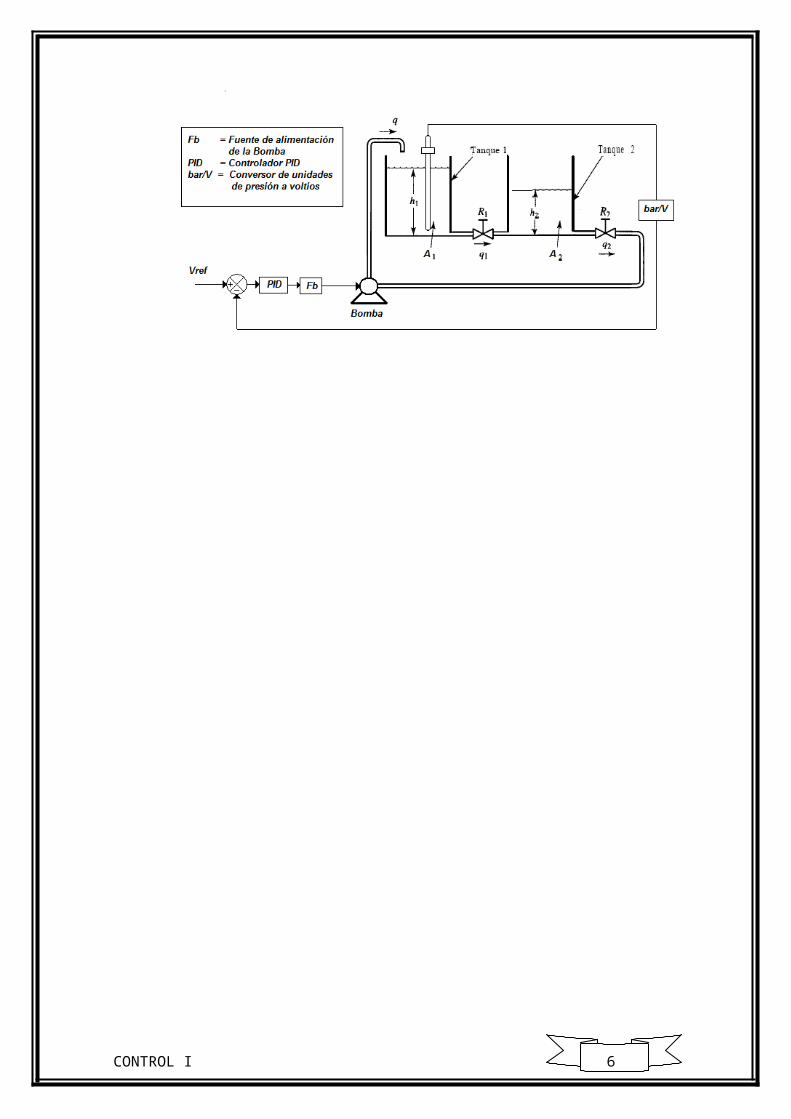
Considere el sistema que aparece en la figura. En este sistema interactúan los dos tanques. Por tanto, la función de transferencia del sistema no es el producto de las dos funciones de transferencia de primer orden. Para ello se obtendrán las ecuaciones que se presentan a continuación.
Donde:q = Flujo de entradah1 = Nivel de líquido del tanque 1h2 = nivel de líquido del tanque 2A1 = Área del tanque 1A2 = Área del tanque 2R1 = Resistencia a la salida del tanqueR2 = Resistencia a la salida del tanque 2
De las ecuaciones planteadas se puede generar las ecuaciones de espacio de estados, de la forma x’ = Ax + Bu, donde x1 = h1, x2 = h2y u = q.

CONTROL I 3
Para resolver esta ecuación de espacio de estados, es necesarioconocer algunos parámetros, como son R1, R2, A1 y A2, que se supone se deben encontrar experimentalmente. Además de esta ecuación se puede resolver para una ecuación de entrada q, una salida h1, o h2, dependiendo como se quiere la función de transferencia. Para el sistema que se estudiara, se necesita unaFunción de transferencia h1/q, es decir para un caudal q, generar unDeterminado nivel h1.
III. MATERIALESMódulos LEYBOLDFuente de Alimentación DC 15-0-15. Multímetro.Cronometro.
IV. EL PROBLEMASe tiene el siguiente sistema de nivel de líquido el cual se quiere controlar utilizando un voltaje de referencia a la entrada del sistema (Vref), para generar una determinada altura, es decir se defineComo una entrada un Vref y como salida una h1.

CONTROL I 4
Como se ve en el sistema de una fuente de alimentación de la bomba, la bomba misma, que es la encargada de alimentar de aguaA los tanques 1 y 2, además consta de un sensor de presión que esel encargado de la medición de la altura, este sensor convierte la señal física a una señal eléctrica de 0 a 10V.
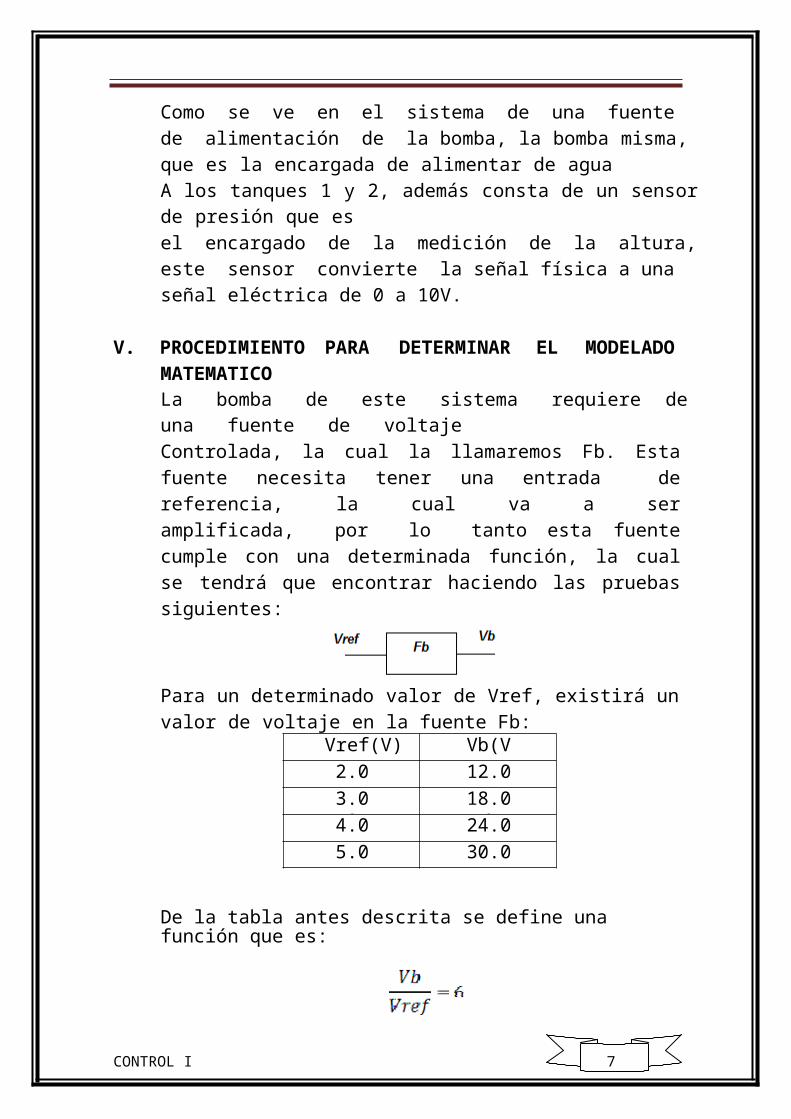
V. PROCEDIMIENTO PARA DETERMINAR EL MODELADO MATEMATICOLa bomba de este sistema requiere de una fuente de voltajeControlada, la cual la llamaremos Fb. Esta fuente necesita tener una entrada de referencia, la cual va a ser amplificada, por lo tanto esta fuente cumple con una determinada función, la cual se tendrá que encontrar haciendo las pruebas siguientes:
Para un determinado valor de Vref, existirá un valor de voltaje en la fuente Fb:
Vref(V) Vb(V)2.00 12.003.00 18.004.00 24.005.00 30.00
De la tabla antes descrita se define una función que es:
En el sistema de tanques se tiene un barómetro, que no es más queUn medidor de presión, este es el que permite hacer mediciones de nivel de líquido. En un sistema de lazo cerrado, el sensor es el que nos permite hacer la realimentación para hacer el control a lazo cerrado.

CONTROL I 5
h1 (cm) Vs(V)1.00 0.662.00 1.233.00 1.814.00 2.405.00 2.966.00 3.497.00 4.118.00 4.609.00 5.13
10.00 5.6711.00 6.15
Para ello se debe encontrar la función de conexión de bar/V delBarómetro, para ello es necesario hacer una tabulación:
Entonces de la tabla se puede encontrar la función S = Vs/H1:
Para completar el sistema se necesita hallar la función de transferencia de la bomba y de los tanques. Como se ve en el fundamento teórico, la ecuación fundamental de los tanques es la ecuación (7), de esta ecuación se necesita hallar los parámetros R1,R2, A1, A2, pero para hallar estos valores se necesita hallar primeroEl caudal de entrada q de los tanques para un valor de altura estable.
h1, experimentalmente se tiene que alimentar la fuente de labomba para llegar a una altura h1 determinada en un tiempo t, y utilizando la ecuación (1), se halla el caudal q, además el volumenen cm3 resulta de multiplicar el A1 por la altura h1 y se mantieneConstante para todos los valores hallados, es decir:
CONTROL I 6
Área = L x WVolumen = Área x H.
A1 = 23 cm2 A2 = 39 cm2
Vref (V) Vb (V) t (s) q(cm3/s) h1 (cm) h2(cm)2.50 15.00 100.00 7.372.80 16.80 48.00 15.353.01 18.06 41.35 17.823.50 21.00 28.80 25.59
2.45 11.00 1.51
Estable
Con los valores tabulados de Vb y q se puede encontrar la función de transferencia de la bomba:
Vb (V) q (cm3 / s)15.00 7.3716.80 15.3518.06 17.8221.00 25.59
Con los valores estables obtenidos, h1, h2, q y utilizando lasecuaciones (3) y (5) se puede encontrar los valores Bomba = Vectores 2 y generar las constantes de la ecuación de estados(Ecuación (7)), es decir:
CONTROL I 7
Calculados los valores A1, A2, R1, R2 la ecuación de espacios deEstados queda como sigue:
Una vez realizada la ecuación de espacio de estados se necesitaencontrar la función de transferencia H1(s)/Q(s), la cual se puede desarrollar teóricamente o utilizando MATLAB, para luego construirEl sistema y simularlo a Laplace en SIMULINK.
Utilizando las ecuaciones (3), (4), (5) y (6), se convierte a Laplace yResulta una función de la siguiente:
Donde los valores de A, B, C, y D son:A = R1 R2 A1 A2 = 236.84388B = R1 A1 + R2 A2 + R2 A1 = 42.334C = R1 R2 A2 = 10.29756D = R1 + R2 = 1.493Entonces la función de transferencia resulta:
Teniendo todas las funciones, construir el esquema general enSIMULINK del sistema de lazo cerrado:

CONTROL I 8
VI. PRUEBAS CON MATLABTransformación del sistema de ecuaciones de espacio de estado aLaplace utilizando MATLAB (todo lo que esta después de % es comentario).% Insertar las ecuaciones de espacio de estados, en forma de matricesA = [] B = []C = []D = []sistema1 = ss(A,B,C,D) % transformación a tiempo continuosistema2 = tf(sistema1) % transformación a función de transferencia
Realizar pruebas en lazo abierto y simular en MATLAB (determinar polos, ceros, lugar geométrico, respuesta al escalón); y explicar el significado de la respuesta.Realizar pruebas en lazo cerrado y simular en MATLAB (determinar polos, ceros, lugar geométrico y respuesta al escalón); y explicar elSignificado de la respuesta.
VII. CUESTIONARIOUna vez establecido el sistema en lazo abierto con ganancia proporcional:1. ¿Qué ocurre con la respuesta del sistema cuando se varía
las constantes de la función de transferencia del sistema de tanques, por ejemplo disminuir la resistencia de la salida del tanque1?
2. ¿Qué ocurre cuando se aumenta o disminuye la resistencia de la bomba? ¿El sistema se vuelve inestable o se vuelve a estabilizar?
3. ¿Qué pasa cuando la salida del tanque 2 es bloqueada, por ejemplo subir la manguera a un nivel superior del nivel de los

CONTROL I 9
Tanques? Explique porque.4. Con el sistema realimentado responda las preguntas anteriores.
5. Explicar que sucede con la respuesta del sistema si se controla con un PI.