istina : investigation of sensitivity tendencies and · istina - : investigation of sensitivity...
TRANSCRIPT

ISTINA - : Investigation of Sensitivity Tendencies and Inverse Numerical Algorithm advances in aerosol
remote sensing
B. Torres, O. Dubovik, D. Fuertes, and P. Litvinov
GRASP- SAS, LOA, Universite Lille-1, Villeneuve d'Ascq, France;
IDEAS+ Task 3 Cal/val meeting, 5 and 6 July 2016, ESRIN/ESA, Frascati, Italy

IDEAS WP 3380-1 - : Analysis of Numerical Inverse Algorithm Advances in Atmospheric Remote Sensing; WP 3380-2 - : Assessments of Sensitivity Tendencies in Aerosol Remote Sensing Experimental data;
IDEAS+ Task 3 Cal/val meeting, 5 and 6 July 2016, ESRIN/ESA, Frascati, Italy
IDEAS +
WP 3380-3 - : Introduction to assimilation and inverse modelling; WP 3380-4 - : Introduction to assimilation and inverse modelling;

IDEAS WP 3380-1 - : Analysis of Numerical Inverse Algorithm Advances in Atmospheric Remote Sensing; WP 3380-2 - : Assessments of Sensitivity Tendencies in Aerosol Remote Sensing Experimental data;
IDEAS+ Task 3 Cal/val meeting, 5 and 6 July 2016, ESRIN/ESA, Frascati, Italy
IDEAS +
WP 3380-3 - : Introduction to assimilation and inverse modelling; WP 3380-4 - : Introduction to assimilation and inverse modelling;

GRASP: Generalized Retrieval of Aerosol and Surface Properties
lidar AERONET
laboratory
POLDER
MISR
AERONET
Surface reflectance
single scattering
shape
MERIS
SentineI -
4
GRASP
BRDF BPDF
open source

NUMERICAL INVERSION
Stat. optimized fitting of f* by f(ap) under a priori constraints
FORWARD MODEL
Simulates observations f(ap) for a given set of parameters ap
Retrieved parameters:
ap –describes optical properties of aerosol and surface
Observation definition:
Viewing geometry, spectral characteristics; coordinates, etc.
Input :
Observations f*
Inversion settings:
- description of error Δf*; - a priori constraints
f*
ap f(ap)
ap - final
General structure of the algorithm
INDEPENDENT MODULES !!!
GRASP
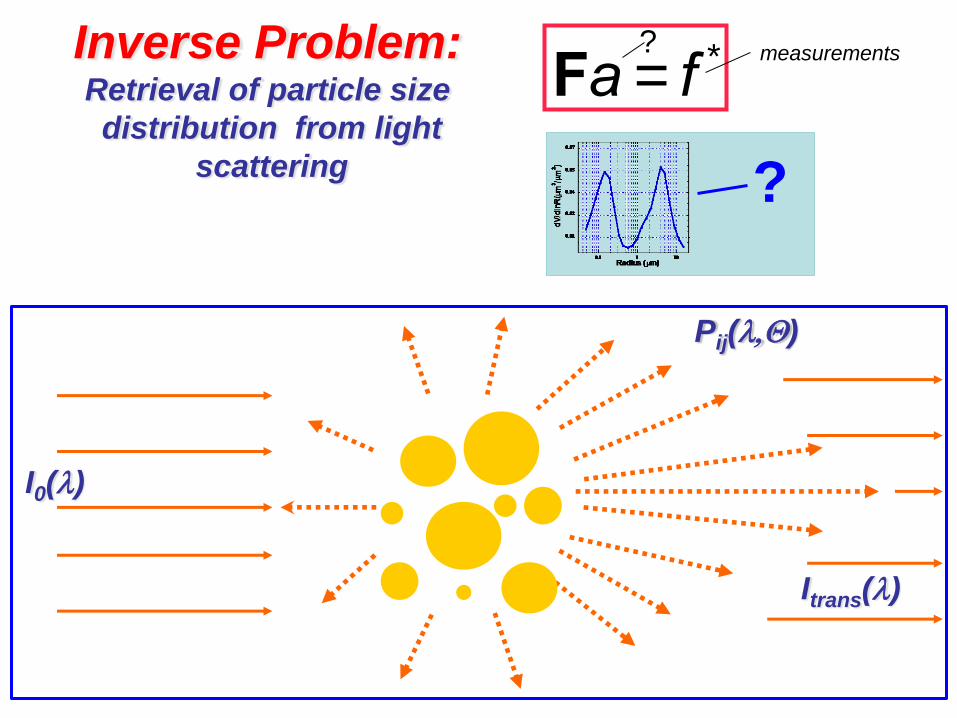
Inverse Problem: Retrieval of particle size
distribution from light
scattering
I0()
Pij()
Itrans()
?
Fa = f * measurements ?

⌢a = F
1
TC1
-1F1( )
-1
F1
TC1
-1f1
*
⌢ a = FTCf
-1F + Ca-1( )
-1
FTCf-1f * + Ca
-1 a*( )
⌢a = FTF+ gI( )
-1
FTf *
⌢a = FTC
f
-1F+gSTS( )-1
FTCf
-1f *( )
a
i
p+1= a
i
p f
i
*fi
pæ
èçç
ö
ø÷÷
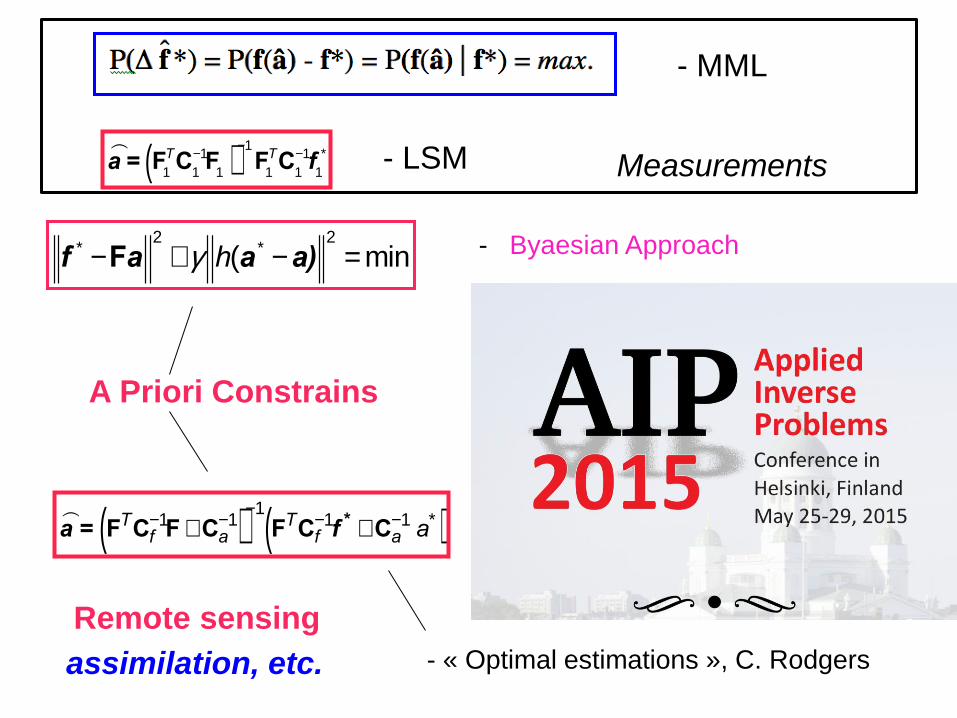
Which approach to use?
- MML
- LSM
- « Optimal estimations », C. Rodgers
- Kalman filter
- Tikhonov Regularization
- Phillips-Tikhonov-Twomey
- Twomey-Chahine
- Chahine
- Steepest Desent Method
Assimilation, 4DVR
SVD, gradient methods, etc.
⌢a = F
1
TC1
-1F1( )
-1
F1
TC1
-1f1
*
- MML
- LSM
f * -Fa
2
+g h(a* - a)2
= min - Byaesian Approach
A Priori Constrains
⌢ a = FTCf
-1F + Ca-1( )
-1
FTCf-1f * + Ca
-1 a*( )
- « Optimal estimations », C. Rodgers
Remote sensing
Measurements
assimilation, etc.

Base idea of inversion
f1
*
f2
*
æ
è
çç
ö
ø
÷÷
=F
11
F21
F12
F22
æ
è
çç
ö
ø
÷÷
a1
a2
æ
è
çç
ö
ø
÷÷
f1
*
f2
*
f3
*
æ
è
çççç
ö
ø
÷÷÷÷
=
F11
F12
F21
F22
F31
F32
æ
è
çççç
ö
ø
÷÷÷÷
a1
a2
æ
è
çç
ö
ø
÷÷
F
f *
a
⌢a = FTF( )
-1
FTf *
⌢a = F( )
-1
f *
- parameters of size distribution
F
f *
a
square
rectangular

Base idea of constrained
inversion
det FTF( ) ®0 FTF( )-1
- ???
What to do?

Base idea of constrained
inversion
det FTF( ) ®0 FTF( )-1
- ???
1
0
0
1
æ
èçç
ö
ø÷÷ = I - Diagonal matrix
great for inversion !!!

Base idea of constrained
inversion
det FTF( ) ®0 FTF( )-1
- ???
FTF( ) ® FTF + I( )
but det FTF + I( ) > 0 FTF + I( ) ¹ FTF( )
???

Base idea of constrained
inversion
det FTF( ) ®0 FTF( )-1
- ???
FTF( ) ® FTF +g I( )
and det FTF +g I( ) > 0 FTF +g I( ) » FTF( )
0

Base idea of constrained
inversion
det FTF( ) ®0 FTF( )-1
- ???
⌢a = FTF +g I( )
-1
FTf *
⌢a = FTF( )
-1
FTf *
0
Solution is
unique and
almost correct
!!!

⌢ a = FTCf
-1F + Ca-1( )
-1
FTCf-1f * + Ca
-1 a*( )
⌢a = FTF+ gI( )
-1
FTf *
⌢a = FTC
f
-1F+gSTS( )-1
FTCf
-1f *( )
Which approach to use?
- « Optimal estimations », C. Rodgers
- Kalman filter
- Tikhonov Regularization
- Phillips-Tikhonov-Twomey
⌢ap+1 =
⌢ap - t
pFTC-1F +g
p I( )
-1
FTC-1D lnf p - Levenberg - Marquardt

CONTENT
1. Introduction
2. Atmospheric remote sensing as an inverse problem 2.1 Interaction of radiation with the atmosphere
2.1.1 Single scattering of electromagnetic radiation
2.1.2 Multiple scattering effects
2.2 Main atmospheric components and their optical properties
2.2.1 Atmospheric gases and molecular scattering
2.2.2 Aerosols and clouds
2.2.3 Underlying surfaces: land and water
2.3 Typical inverse problems of remote sensing
2.3.1 Primary linear problems
2.3.2 Essentially non-linear problems
3. Linear system of equations 3.2 Matrix inversion solutions
3.3 Iterative linear solutions
3.4 Solutions of non-linear systems
3.5 Methods of constrained inversions, basic concept of overcoming solution instability
4. Statistical estimation concept 4.1 Solving system of equation in the presence of noise in the data
4.2 Method of Maximum Likelihood
4.3 Optimality of the Method of Maximum Likelihood
4.3.1 Cramer–Rao Inequality
4.3.2 Fisher matrix
4.3.3 Fisher definitions of information
“METHODS OF NUMERICAL INVERSION IN
ATMOSPHERIC REMOTE SENSING AND INVERSE
MODELING: AN INTRODUCTION”

5. Least Squares Method 5.1 Gaussian Distribution of Noise (Normal Central Theorem)
5.2 Formulation of the LSM as a minimization procedure
5.3 Estimation of the solution covariance matrix
5.4 Information content and its analysis
5.5 Estimations of linear functions of the retrieved parameters
6. Methods of constrained inversions 6.1 Ill-posed problem definition
6.2 Strategy of constrained inversions
6.2.1 General idea of using constraints for solving ill-posed problems
6.2.2 Smoothness a priori constraints, equations by Phillips–Tikhonov–Twomey
6.2.3 Solution constraints by means of using direct a priori estimates on unknown Kalman filter, Optimum estimations
by Rogers, Bayesian statistics approach
6.2.4 Methods for ensuring solution non-negativity and other diverse approaches 7. Including additional a priori information and Multi-Term Least Squares Method 7.1 Definition of Multi-Term LSM
7.2 Utilizing a priori estimates of unknowns
7.3 Utilizing a priori information about smoothness of the retrieved functions
7.4 Utilizing multiple a priori constraints simultaneously
7.5 Concept of statistically optimized “Multi-Pixel” Inversion
8. Optimized solution of non-linear system of equations 8.1 Optimization of solution of non-linear system in presence of noise
8.2 Gauss–Newton and Quasi-Newton iterations
8.3 Solution convergence, Levenberg–Marquardt iterations
8.4 Steepest-decent and other gradient methods

9. Limitation of “statistical estimation” optimization of inverse solution 9.1 Utilization of a priori constraints on solution non-negativity: linear regularization methods, non-linear Chahine and
Twomey–Chahine inversion procedures
9.2 Application of a priori constraints on solution non-negativity in the framework of statistical optimization formalism
9.3 Accounting for effect of “redundant observations”
10. General recommendations, remote sensing applications, the GRASP
algorithm
10.1 General recommendations for the inverse algorithm development
10.2 Satellite and ground-based atmospheric remote sensing
10.3 GRASP algorithm
10.4 Tropospheric aerosol remote sensing applications:
10.4.1 Retrieval of aerosol properties from measurements of aerosol extinction and angular singe scattering
10.4.2 Aerosol columnar properties retrieval from ground-based observations with sun-photometers
10.4.3 Aerosol columnar properties and surface reflectance retrieval from satellite multi-angular and polarimetric
observations
10.4.4 Retrieval of aerosol vertical profiles from active lidar observations
10.4.5 Enhanced retrieval of aerosol columnar and vertical properties from combined sun-photometer and lidar
ground-based observations
11. Introduction to assimilation and inverse modeling 11.1 Atmospheric chemistry transport modeling, equation of diffusion11.2 Assimilation and inverse modeling: gradient
solutions using adjoint operators
11.3 Utilization of diverse a priori constraints in assimilation and inverse modeling
11.3.1 Model forecast as an a priori estimate
11.3.2 Smoothness constraints on temporal and spatial variability of retrieved geofields
11.4 Retrieval of aerosol emission sources from remote sensing by inverse modeling
11.4.1 Retrieval of aerosol emission sources from MODIS observations by GOCART inverse modeling
11.4.2 Retrieval of aerosol emission sources from POLDER/PARASOL observations by GEOS-CHEM inverse
modeling

Multi-term LSM Multi-Pixel Solution:
av
an
an
ah
asph
aVc
abrdf ,1
abrdf ,2
abrdf ,3
abpdf
æ
è
ççççççççççççççççç
ö
ø
÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷
gDW =
gD,1W
10 0 0 0 0 0 0 0 0
0 gD,2W
20 0 0 0 0 0 0 0
0 0 gD,3W
30 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 gD,4W
40 0 0
0 0 0 0 0 0 0 gD,5W
50 0
0 0 0 0 0 0 0 0 gD,6W
60
0 0 0 0 0 0 0 0 0 gD,7W
7
æ
è
çççççççççççççççç
ö
ø
÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷
Sy
TSy=
Id
11
Id
12
Id
13
Id
21
Id
22
Id
23
Id
31
Id
32
Id
33
æ
è
ççççç
ö
ø
÷÷÷÷÷
0 0 0
0 0 0
0 0 0
æ
è
ççç
ö
ø
÷÷÷
0 0 0
0 0 0
0 0 0
æ
è
ççç
ö
ø
÷÷÷
0 0 0
0 0 0
0 0 0
æ
è
ççç
ö
ø
÷÷÷
Id
11
Id
12
Id
13
Id
21
Id
22
Id
23
Id
31
Id
32
Id
33
æ
è
ççççç
ö
ø
÷÷÷÷÷
0 0 0
0 0 0
0 0 0
æ
è
ççç
ö
ø
÷÷÷
0 0 0
0 0 0
0 0 0
æ
è
ççç
ö
ø
÷÷÷
0 0 0
0 0 0
0 0 0
æ
è
ççç
ö
ø
÷÷÷
Id
11
Id
12
Id
13
Id
21
Id
22
Id
23
Id
31
Id
32
Id
33
æ
è
ççççç
ö
ø
÷÷÷÷÷
æ
è
ççççççççççççççççççç
ö
ø
÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷
; St
TSt=
Id
11
0 0
0 Id
11
0
0 0 Id
11
æ
è
ççççç
ö
ø
÷÷÷÷÷
Id
12
0 0
0 Id
12
0
0 0 Id
12
æ
è
ççççç
ö
ø
÷÷÷÷÷
Id
13
0 0
0 Id
13
0
0 0 Id
13
æ
è
ççççç
ö
ø
÷÷÷÷÷
Id
21
0 0
0 Id
21
0
0 0 Id
21
æ
è
ççççç
ö
ø
÷÷÷÷÷
Id
22
0 0
0 Id
22
0
0 0 Id
22
æ
è
ççççç
ö
ø
÷÷÷÷÷
Id
23
0 0
0 Id
23
0
0 0 Id
23
æ
è
ççççç
ö
ø
÷÷÷÷÷
Id
31
0 0
0 Id
31
0
0 0 Id
31
æ
è
ççççç
ö
ø
÷÷÷÷÷
Id
32
0 0
0 Id
32
0
0 0 Id
32
æ
è
ççççç
ö
ø
÷÷÷÷÷
Id
33
0 0
0 Id
33
0
0 0 Id
33
æ
è
ççççç
ö
ø
÷÷÷÷÷
æ
è
ççççççççççççççççççç
ö
ø
÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷
.
Wx
= Sx
TSx; W
y= S
y
TSy; W
t= S
t
TSt;
43 parameters
Sy
TSy=
Id
11
Id
12
Id
13
Id
21
Id
22
Id
23
Id
31
Id
32
Id
33
æ
è
ççççç
ö
ø
÷÷÷÷÷
0 0 0
0 0 0
0 0 0
æ
è
ççç
ö
ø
÷÷÷
0 0 0
0 0 0
0 0 0
æ
è
ççç
ö
ø
÷÷÷
0 0 0
0 0 0
0 0 0
æ
è
ççç
ö
ø
÷÷÷
Id
11
Id
12
Id
13
Id
21
Id
22
Id
23
Id
31
Id
32
Id
33
æ
è
ççççç
ö
ø
÷÷÷÷÷
0 0 0
0 0 0
0 0 0
æ
è
ççç
ö
ø
÷÷÷
0 0 0
0 0 0
0 0 0
æ
è
ççç
ö
ø
÷÷÷
0 0 0
0 0 0
0 0 0
æ
è
ççç
ö
ø
÷÷÷
Id
11
Id
12
Id
13
Id
21
Id
22
Id
23
Id
31
Id
32
Id
33
æ
è
ççççç
ö
ø
÷÷÷÷÷
æ
è
ççççççççççççççççççç
ö
ø
÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷÷
;

⌢a = F
1
TC1
-1F1( )
-1
F1
TC1
-1f1
*
⌢ a = FTCf
-1F + Ca-1( )
-1
FTCf-1f * + Ca
-1 a*( )
⌢a = FTF+ gI( )
-1
FTf *
⌢a = FTC
f
-1F+gSTS( )-1
FTCf
-1f *( )
a
i
p+1= a
i
p f
i
*fi
pæ
èçç
ö
ø÷÷
Which approach to use?
- MML
- LSM
- « Optimal estimations », C. Rodgers
- Kalman filter
- Tikhonov Regularization
- Phillips-Tikhonov-Twomey
- Twomey-Chahine
- Chanine
- Steepest Desent Method
f * -Fa
2
+g h(a* - a)2
= min
- Byaesian Approach

P ~ exp -1
2
(fi* -f i(a))2
iå
s2
æ
è
ç ç
ö
ø
÷ ÷
= max
Gaussian noise assumption:
P (f * - f(a)) = max
PDF(Likelihood function)
(fi* -f i(
⌢ a ))2 = min
iå
Maximum Likelihood Principle:
Least Squares Principle
LSM gives optimum solution:
sai
2 = (⌢ a i - areal )
2-Smallest !!! LSM - Optimality
noise system is redundant
noise can be accounted

2. Optimality of LSM:
1. if P (...) Gaussian, MML = MLS
Statistical Optimization
ÑY a( ) =¶Y a( )
¶ai
= 0, (i = 1,..,Na)
Y a( ) =1
2(f a( ) - f*)T C-1(f a( ) - f*) = min
f – Normal => a - Normal
<(Δg)2> = < g TΔã(g TΔã)T> =
= g TΔã(Δã)Tg = g TΔã g ≥ g TΔLSM g
- Cramer-Rao inequality
g - a characteristic linearly dependent on a (i.e. g =
g Ta, g is a vector of coefficients)

2. Shannon Information:
Fisher Information:
Information Quantity:
1.
h P ˆ C ( )( ) = -¶ 2
ln P ˆ C ( )¶ ˆ C
2
æ
è
ç ç
ö
ø
÷ ÷ ò P ˆ x ( )d ˆ x =
1
D ˆ C 2
min
h P ˆ C ( )( ) = - log2 P ˆ C ( )( )ò P ˆ C ( )dˆ x ® Nbits
Nbits- number of bits (binary digits) needed to represent the
number of distinct estimates that could have be obtained
Gauss Probability Function
P(C
)
<C>
<DC2>1/2
Nsymbols ~ 2Nbits
Information Quantity: