instituto politÉcnico nacional -...
TRANSCRIPT

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA
Y ELÉCTRICA
UNIDAD PROFESIONAL ADOLFO LÓPEZ MATEOS
“Selección e implementación de un algoritmo para el control y monitoreo de nivel, variando el flujo de entrada de un prototipo de laboratorio modelo RT-210 Process Control RIG”
TESIS:
Que para obtener el título de: Ingeniero en Control y Automatización.
PRESENTA:
González Salazar Noé.
México Distrito Federal, 01 de Diciembre del 2009

INSTITUTO POLITECNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA MECANICA y ELECTRICA
UNIDAD PROFESIONAL "ADOLFO LOPEZ MATEOS"
TEMA DE TESIS
INGENIERO EN CONTROL Y AUTOMATIZACIÓNQUE PARA OBTENER EL TITULO DE
POR LA OPCION DE TITULACION PROYECTO DE INVESTIGACIÓN REG. SIP20090181
DEBERA(N) DESARROLLAR C.-NOÉ GONZÁLEZ SALAZAR
"SELECCIÓN E IMPLEMENTACIÓN DE UN ALGORITMO PARA EL CONTROL Y MONITOREO DE NIVEL, VARIANDO EL FLUJO DE ENTRADA DE UN PROTOTIPO DE LABORATORIO
MODELO RT...210 PROCESS CONTROL RIG."
." ...' .-. ; ' 'lo-'
IMPLEMENTAR U . GORrfMO ' PARA . MONI'r0RE()/Y 'qONTROL DE NIVEL EN UN . PROTOTIPO MOD8EO ' RT-210 ·PROCE SS .CÓNT ROL RIG,1'CON :U ' VARIACIÓN DEL FLUJO DE ENTRADA, QUE PE~IJ'~ 1\L ALUMNO INTERAcTIJ.*.CQN EL:SIS1!ÉMA.
'~.. t~ :· ~~..·,:' -" ;' .\;. 't'''' '~;:f ':':'. ' .. .
. 'L ~,,""', .:i": (. ~." .. :. ~ - ~~~: t :''':-;0~\> ,"J ..
. '.~ '.." r' ~ INTRODUCCION. . . ~ JUSTIFICACIÓN. . . ~ :. . ~ ESTRUCTURA DE U 'TESIS': . ~ OBJETIVO GENERAL. ;~ ; . . ' ,. . .' .::;,"'?; ~ OPERACIÓN Y ANÁLISIS DE SENÁLES DEL MODELO RT-210 PROCESS CONTROL RIG. ~ ALGORITMO DE CONTROLYCONTROLAnOR. ~ IMPLEMENTACIÓN.DECPID EN.UNPIC~CÓMUNICACIÓNY SOFTWARE PARA
MONITOREO. ' • o," /;~;oo. , !~.O :,' •
~ ANÁLISIS ECONÓMICO Y MANTENIMIENTO. . ~ CONCLUSIONES. ':' ';."~:; ...
MÉXICO D .F., 25 DE JUNIO 2010
ASESORES )?f< M. EN C. PEDRO FCO. HUERTA GONZÁLE ING. RICARDO HURTADO RANGEL.
Agradecimientos
Para Dios:
Para mi familia:
Para mi Institución:
Gracias por la vida y la familia que me
has dado, gracias por la oportunidad de alcanzar uno de los tantos escalones que tiene la vida; esperando que no sea el último y que sean muchos más los que pueda alcanzar.
Por el infinito aprecio y agradecimiento
que les tengo, por una vida de esfuerzo, cariño y apoyo, cuando más lo necesite, espero de todo corazón que mi triunfo lo sientan como suyo propio.
Gracias a mi muy querida y estimada
Institución por la educación que recibí y por el panorama que me hizo ver que siempre hay más cosas a las que se puede aspirar y lograr cuando uno se lo propone y así llegar a ser siempre el mejor dondequiera que se esté y muy orgullosamente llevar siempre en alto el nombre de la Institución.
i

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
1
Índice general
Página
Agradecimientos ............................................................................................................................................................ i
Índice general ................................................................................................................................................................. 1
Índice de figuras ............................................................................................................................................................ 3
Índice de tablas .............................................................................................................................................................. 5
Índice de ecuaciones .................................................................................................................................................... 6
Introducción .................................................................................................................................................................... 8
Justificación ..................................................................................................................................................................... 9
Estructura de la tesis ................................................................................................................................................ 10
Objetivo general ......................................................................................................................................................... 11
Capítulo 112
[Operación y análisis de señales del modelo RT-210 Process Control RIG] ...................... 12
1.1 Funcionamiento del modelo RT-210 Process Control RIG ....................................................... 13
1.1.1 Funcionamiento de nivel......................................................................................................................... 16
1.2 Sensor de nivel capacitivo ...................................................................................................................... 19
1.2.1 Especificaciones técnicas del sensor y del tanque de proceso. ............................................... 20
1.3 Análisis de la señal del sensor capacitivo ........................................................................................ 27
1.4 Capacidad de la bomba o actuador ..................................................................................................... 30
1.5 Análisis de la señal óptima para el actuador .................................................................................. 31
Capítulo 234
[Algoritmo de control y controlador] ................................................................................................ 34
2.1 Selección del algoritmo de control...................................................................................................... 36
2.2 Parámetros para la sintonización del PID........................................................................................ 38
2.3 Cálculo del PID ............................................................................................................................................ 44
2.4 Análisis del funcionamiento del controlador ................................................................................. 52
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
2
Capítulo 354
[Implementación del PID en un PIC, comunicación y software para monitoreo] ........... 54
3.1 Implementación del PID en un PIC ..................................................................................................... 57
3.2 Comunicación .............................................................................................................................................. 67
3.3 Monitoreo ...................................................................................................................................................... 73
Capítulo 477
[Análisis económico y mantenimiento] ............................................................................................ 77
4.1 Análisis económico del proyecto ......................................................................................................... 79
4.2 Mantenimiento ............................................................................................................................................ 82
Conclusiones ................................................................................................................................................................ 85
Referencias bibliográficas ...................................................................................................................................... 90
Software utilizado ...................................................................................................................................................... 92
Apéndices ...................................................................................................................................................................... 93

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
3
Índice de figuras
Página
Capítulo 1
Figura 1.1 Fotografía del RT-210 Process Control RIG ............................................................................. 14
Figura 1.2 RT-210 Process Control RIG ............................................................................................................ 14
Figura 1.3. Primera forma de llenado ................................................................................................................ 16
Figura 1.4. Segunda forma de llenado ............................................................................................................... 17
Figura 1.5. Perturbación ......................................................................................................................................... 18
Figura 1.6. Ubicación del sensor de nivel [corte frontal] ......................................................................... 20
Figura 1.7 Ubicación del sensor de nivel [vista superior] ........................................................................ 21
Figura 1.8 Gráfica tiempo (segundos) - nivel (centímetros) .................................................................. 24
Figura 1.9 Gráfica nivel (centímetros) - nivel (volts) ................................................................................ 26
Figura 1.10 Señal de salida del sensor de nivel ............................................................................................ 27
Figura 1.11 Filtro para el sensor de nivel ........................................................................................................ 28
Figura 1.12 Señal filtrada del sensor de nivel ............................................................................................... 29
Figura 1.13 Gráfica voltaje de alimentación - flujo de salida de la bomba ........................................ 32
Capítulo 2
Figura 2.1. Prueba a lazo abierto ......................................................................................................................... 38
Figura 2.2. Señal del sensor de nivel .................................................................................................................. 39
Figura 2.3. Simulación con la función de transferencia ............................................................................ 42
Figura 2.4. Respuesta de la función de transferencia ................................................................................ 43
Figura 2.5. Obtención de parámetros del sistema ....................................................................................... 45
Figura 2.6. Lazo de control cerrado .................................................................................................................... 47

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
4
Figura 2.7. Respuesta del sistema a lazo cerrado y controlador ............................................................ 48
Figura 2.8. Lazo de control cerrado .................................................................................................................... 49
Figura 2.9. Dimensionamiento del sistema ..................................................................................................... 50
Figura 2.10. Respuesta del sistema dimensionado ...................................................................................... 51
Figura 2.11 Lazo de control con perturbaciones ......................................................................................... 52
Figura 2.12 Respuesta del controlador a perturbaciones ........................................................................ 53
Capítulo 3
Figura 3.1 Sistema de control y comunicación .............................................................................................. 56
Figura 3.2 Circuito eléctrico para el sistema de control ............................................................................ 65
Figura 3.3 Circuito eléctrico para el sistema de control con comunicación ...................................... 72
Figura 3.4 Configuración para recibir datos por el puerto serial .......................................................... 73
Figura 3.5 Apariencia del sistema de monitoreo .......................................................................................... 74
Figura 3.6 Simulación a diferentes valores de set point ............................................................................ 75
Figura 3.7 Cambio de set point ............................................................................................................................. 76

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
5
Índice de tablas
Página
Capítulo 1
Tabla 1.1 Partes del RT-210 Process Control RIG ....................................................................................... 15
Tabla 1.2 Partes del tanque de proceso en vista lateral ........................................................................... 20
Tabla 1.3 Partes del tanque de proceso en vista superior ....................................................................... 21
Capítulo 2
Tabla 2.1 Parámetros para el cálculo del PID ................................................................................................ 45
Capítulo 3
Tabla 3.1. Rutina PID y envío de datos para la comunicación. ................................................................ 69
Capítulo 4
Tabla 4.1. Tiempo invertido de ingeniería ...................................................................................................... 80
Tabla 4.2. Costo por concepto de ingeniería. .................................................................................................. 80
Tabla 4.3. Costo de materiales .............................................................................................................................. 81
Tabla 4.4. Partes del RT-210 Process Control RIG propensas a fallas ................................................. 82

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
6
Índice de ecuaciones
Página
Capítulo 1
Ecuación 1.1 Fórmula para el cálculo del volumen del tanque de proceso ..................................... 22
Ecuación 1.2 Ecuación de la recta ..................................................................................................................... 23
Ecuación 1.3 Relación lineal, tiempo para el llenado del tanque - nivel, [sin drenado y sin
……………….……tiempo muerto] ............................................................................................................................. 23
Ecuación 1.4 Relación lineal, nivel (centímetros) - nivel (volts), [detectados por el sensor en el
………….………...llenado del tanque] ...................................................................................................................... 25
Ecuación 1.5 Ecuación para determinar el flujo volumétrico de la bomba ...................................... 30
Ecuación 1.6 Relación lineal, voltaje de alimentación - flujo de salida de la bomba ..................... 31
Capítulo 2
Ecuación 2.1 PID en el dominio del tiempo .................................................................................................. 37
Ecuación 2.2 PID en el dominio de la frecuencia ........................................................................................ 37
Ecuación 2.3 Ecuación para calcular la magnitud de la señal del sensor de nivel ........................ 40
Ecuación 2.4 Función de transferencia para sistemas de 1er. orden ................................................. 40
Ecuación 2.5 Ganancia de proceso. .................................................................................................................... 41
Ecuación 2.6 Constante de tiempo ..................................................................................................................... 41
Ecuación 2.7 Función de transferencia del sistema de nivel .................................................................. 41
Ecuación 2.8 Evolución de la respuesta al 63.2% [ ] .............................................................................. 44
Ecuación 2.9 Evolución de la respuesta al 28% ........................................................................................... 44
Ecuación 2.10 Cálculo del valor de la pendiente .......................................................................................... 44
Ecuación 2.11 Constante del control proporcional .................................................................................... 45
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
7
Ecuación 2.12 Tiempo de integración .............................................................................................................. 45
Ecuación 2.13 Tiempo derivativo ...................................................................................................................... 45
Ecuación 2.14 Constante del control integral ............................................................................................... 45
Ecuación 2.15 Constante del control derivativo. ......................................................................................... 45
Ecuación 2.16 Cálculo de la constante del control proporcional. ......................................................... 46
Ecuación 2.17 Cálculo del tiempo de integración ........................................................................................ 46
Ecuación 2.18 Cálculo del tiempo derivativo ................................................................................................ 46
Ecuación 2.19 Cálculo de la constante del control integral. .................................................................... 46
Ecuación 2.20 Cálculo de la constante del control derivativo ................................................................ 47
Ecuación 2.21 PID calculado para el control del sistema de nivel. ........................................................ 47
Capítulo 3
Ecuación 3.1 PID en el dominio de Fourier .................................................................................................... 57
Ecuación 3.2 PID calculado en el dominio de Fourier ............................................................................... 57
Ecuación 3.3 Parámetro proporcional del PID a ser usado en el programa del PIC ..................... 58
Ecuación 3.4 Parámetro intergral del PID a ser usado en el programa del PIC .............................. 58
Ecuación 3.5 Parámetro derivativo del PID a ser usado en el programa del PIC ........................... 58
Ecuación 3.6 Síntesis de la ecuación para el cálculo de la resistencia necesaria para
…………………… el optoacoplador ......................................................................................................................... 66
Ecuación 3.7 Despeje de la resistencia de la ecuación 3.6 ....................................................................... 66
Ecuación 3.8 Cálculo de la resistencia necesaria para el optoacoplador ........................................... 66

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
8
Introducción
El enfoque de este proyecto de investigación es habilitar el modelo RT-210
Process Control RIG; al poner en operación el sistema que se hace cargo del llenado
del tanque donde se lleva a cabo un proceso de calentamiento.
Esta tesis presenta el desarrollo tecnológico necesario para el funcionamiento y
operación del prototipo de laboratorio antes citado; por lo cual en sus diversos
capítulos se analiza el funcionamiento, operaciones básicas y de detalle, señales de
entrada y salida, sintonización del controlador seleccionado, comunicación con un
sistema para el monitoreo de nivel, así como los fundamentos necesarios para la
puesta en marcha.
La importancia de este proyecto radica en la necesidad de buscar una nueva forma
más económica de implementar un sistema de control, que permita poner en
operación el proceso ya mencionado.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
9
Justificación
El modelo RT-210 Process Control RIG tiene un sistema de control original en
pésimas condiciones e incompleto; por otra parte se encuentra obsoleto en cuestiones
tecnológicas; lo que se pretende es hacer uso de un algoritmo de control
implementado en un PIC (Controlador de interfaz periférico), que en operación
conjunta con la instrumentación existente para nivel, mejore la operación de dicho
prototipo.
El actual trabajo, derivado de un proyecto de investigación con clave de la SIP
20090181 tiene como finalidad habilitar la planta modelo RT-210 Process Control
RIG, con el propósito de que los alumnos de la carrera de Ingeniería en Control y
Automatización puedan hacer uso didáctico del prototipo en cuestión; a su vez este
proyecto contribuye a mejorar y poner en operación el equipo perteneciente a la
carrera citada.
Así también se resalta la característica de que un sistema de control aplicado en un
PIC es tecnológicamente más aceptable y económicamente más barato que las tarjetas
de control originales pertenecientes al RT-210 Process Control RIG.
Otro aspecto que hay que resaltar y que es fundamental, ya que parte de la formación
de un Ingeniero en Control y Automatización, es que al realizar este proyecto de tesis
se ponen a prueba los conocimientos que se han adquirido en el transcurso de la
carrera.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
10
Estructura de la tesis
Para comenzar con el trabajo de tesis hay que tener un punto de partida bien
definido, con el propósito de hacer claro y preciso lo que se pretende lograr, los
alcances del proyecto y la calidad que este trabajo demanda; de esta forma se
comienza por conocer lo más relevante del proceso en cuestión, dado que este
presenta muchas características y consideraciones que se tiene que tomar en cuenta
para cumplir con el objetivo de la tesis; en el capítulo uno se indican las características
primordiales acerca de dicho proceso, tales como son el principio de funcionamiento y
operación del sistema de nivel, mediante el dispositivo relacionado a la medición de
este, así como la interpretación de las señales que se reciben por parte del sensor de
nivel y la razón de dichas señales, también se analiza el comportamiento y
características de operación del actuador, el cual permite en base a un algoritmo de
control mantener un nivel programado. En el capítulo dos se hace la selección de un
algoritmo de control que permita cubrir los requerimientos que el sistema necesita
para su correcto funcionamiento, lo cual es posible mediante el conocimiento de las
señales que entrega la planta en cuestión a la medición de nivel. Por otra parte la
implementación del algoritmo de control a un controlador y el monitoreo del sistema,
se presentan en el capítulo tres, donde se muestran los fundamentos para su
implementación. En el capítulo cuatro, con las bases que se tienen, se hace el análisis
de costo-beneficio y mantenimiento del sistema diseñado. Finalmente se presentan las
conclusiones, que son las pruebas fehacientes de haber hecho una selección correcta
del sistema de control y un buen trabajo en el desarrollo de la tesis.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
11
Objetivo general
“Implementar un algoritmo para monitoreo y control de nivel en un prototipo modelo
RT-210 Process Control RIG, con la variación del flujo de entrada, que permita al alumno
interactuar con el sistema”

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
12
Capítulo 1 [Operación y análisis de señales del modelo RT-210 Process Control
RIG]

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
13
Capítulo 1
La Torre o Unidad de Control de Procesos RT-210, [RT-210 Process Control RIG
por su significado en inglés], es un modelo experimental de laboratorio representativo
de un proceso industrial típico, en el que la temperatura, el flujo y nivel tienen que ser
controlados, tal como se hace en la producción de alimentos, bebidas y la industria
petroquímica.
El sistema o planta RIG se basa en un proceso de flujo de fluidos, donde el flujo, la
temperatura y el nivel pueden ser controlados.
1.1 Funcionamiento del modelo RT-210 Process Control RIG.
El agua destilada contenida en un tanque colector se bombea alrededor del
sistema y hacia un tanque de proceso en el que se puede calentar; el flujo y la entrada
de calor pueden ser controlados; el proceso también incluye el sistema para permitir
que el flujo de agua sea desviada a través de un enfriador de aire forzado, o
permanezca sin pasar por este [1].
Como principal objetivo está el mantener en el tanque de proceso una temperatura y
un nivel determinados; siendo el principal objetivo de esta tesis el control de nivel, la
temperatura e incremento o decremento de esta no es factor primordial a tratar; pero
se hace mención para fines de entendimiento acerca del funcionamiento del proceso.
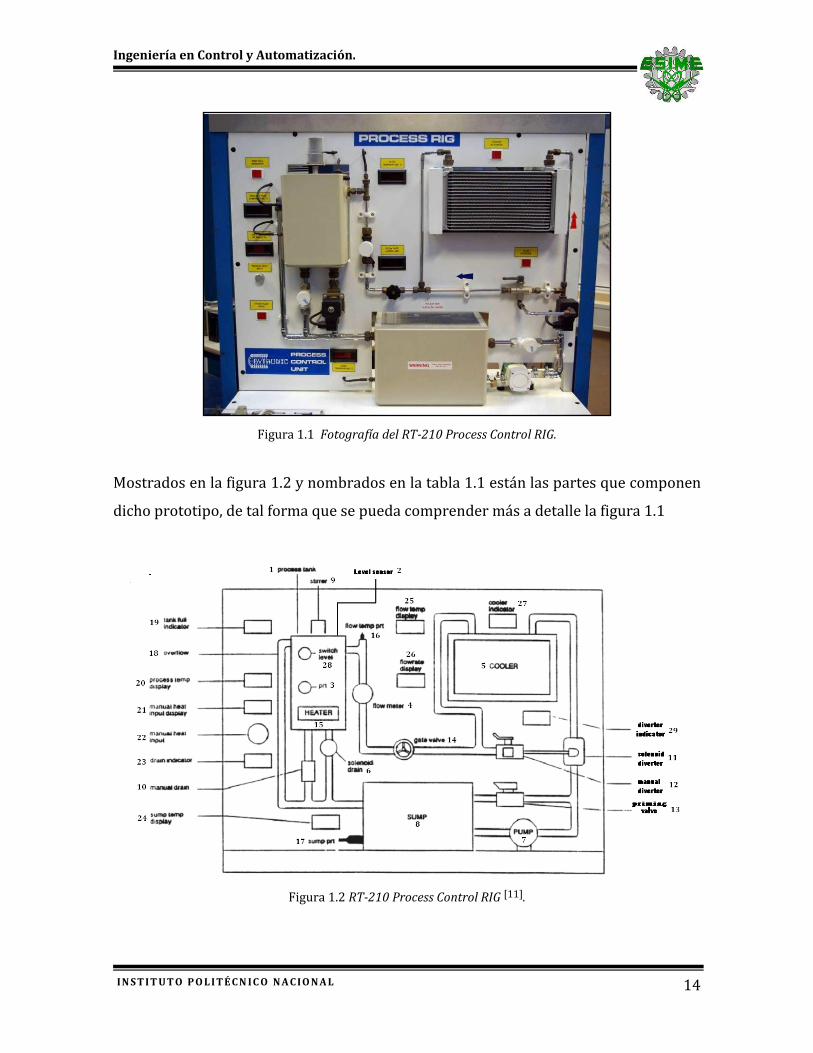
La figura 1.1 muestra el prototipo con el que se cuenta en los laboratorios de la
escuela y en ella se pueden apreciar las principales partes operacionales que la
componen y las condiciones en que se encuentra.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
14
Figura 1.1 Fotografía del RT-210 Process Control RIG.
Mostrados en la figura 1.2 y nombrados en la tabla 1.1 están las partes que componen
dicho prototipo, de tal forma que se pueda comprender más a detalle la figura 1.1
Figura 1.2 RT-210 Process Control RIG [11].

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
15
La tabla 1.1 muestra las partes principales de las que se compone el prototipo.
Tabla 1.1 Partes del RT-210 Process Control RIG [1].
1-Process tank. Tanque de proceso.
2-Level sensor. Sensor de nivel [capacitivo].
3-Prt. Sensor de temperatura de resistencia de platino.
4-Flow meter. Sensor de caudal.
5-Cooler. Enfriador con ventilador.
6-Solenoid drain. Válvula de control/válvula de drenado.
7-Pump. Bomba.
8-Sump. Tanque de abastecimiento.
9-Stirrer. Agitador.
10-Manual drain. Válvulas de drenado manual.
11-Solenoid diverter. Solenoide desviador.
12-Manual diverter. Desviador manual.
13-Priming valve. Válvula de purgado.
14-Gate valve. Válvula de compuerta.
15-Heater. Calentador.
16-Flow temp prt. Sensor de temperatura de flujo, tipo prt.
17-Sump prt. Sensor de temperatura del tanque, tipo prt.
18-Overflow. Drenado de sobreflujo.
19-Tank full indicador. Indicador de tanque lleno.
20-Process temp display. Pantalla para indicar la temperatura del proceso.
21-Manual heat input display. Pantalla indicadora de temperatura seleccionada.
22-Manual heat input. Selector de temperatura.
23-Drain indicador. Indicador de drenado.
24-Sump temp display. Pantalla indicadora de temperatura en el tanque.
25-Flow temp display. Pantalla indicadora de temperatura del flujo.
26-Flowrate display. Pantalla indicadora de flujo.
27-Cooler indicador. Indicador del enfriador.
28-Switch level. Interruptor de nivel.
29-Diverter indicador. Indicador de desviación.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
16
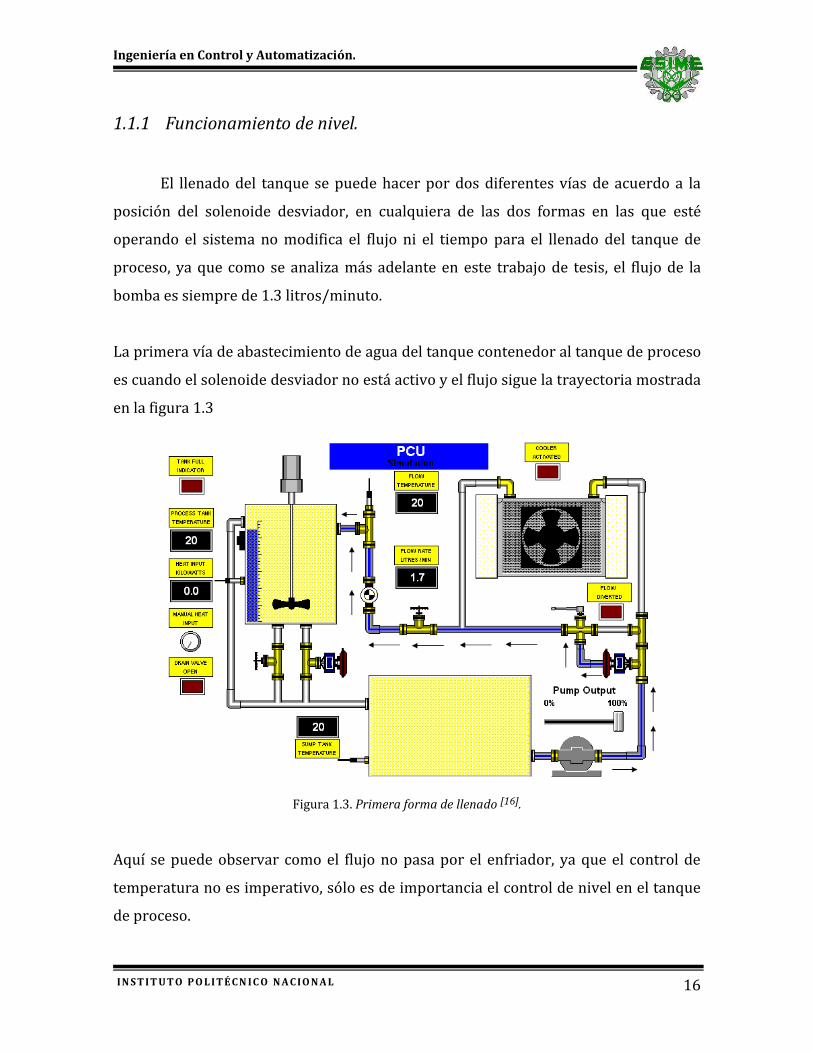
1.1.1 Funcionamiento de nivel.
El llenado del tanque se puede hacer por dos diferentes vías de acuerdo a la
posición del solenoide desviador, en cualquiera de las dos formas en las que esté
operando el sistema no modifica el flujo ni el tiempo para el llenado del tanque de
proceso, ya que como se analiza más adelante en este trabajo de tesis, el flujo de la
bomba es siempre de 1.3 litros/minuto.
La primera vía de abastecimiento de agua del tanque contenedor al tanque de proceso
es cuando el solenoide desviador no está activo y el flujo sigue la trayectoria mostrada
en la figura 1.3
Figura 1.3. Primera forma de llenado [16].
Aquí se puede observar como el flujo no pasa por el enfriador, ya que el control de
temperatura no es imperativo, sólo es de importancia el control de nivel en el tanque
de proceso.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
17
La segunda vía de abastecimiento es cuando el solenoide desviador está activo y el
flujo sigue la trayectoria mostrada en la figura 1.4.
Figura 1.4. Segunda forma de llenado [16].
Por lo tanto, el control del solenoide desviador puede ser operado a necesidad de la
temperatura requerida en el sistema, o de las necesidades que requiera el proceso en
cuestión a la circulación del flujo, sin necesidad de que estos interfieran con el control
de nivel en el tanque de proceso.
De tal forma de que sin importar la temperatura en el tanque de proceso, el sistema
siempre tendrá un sistema de control de nivel ajustado a petición del operario, ya que
este lazo de control es independiente al de temperatura.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
18
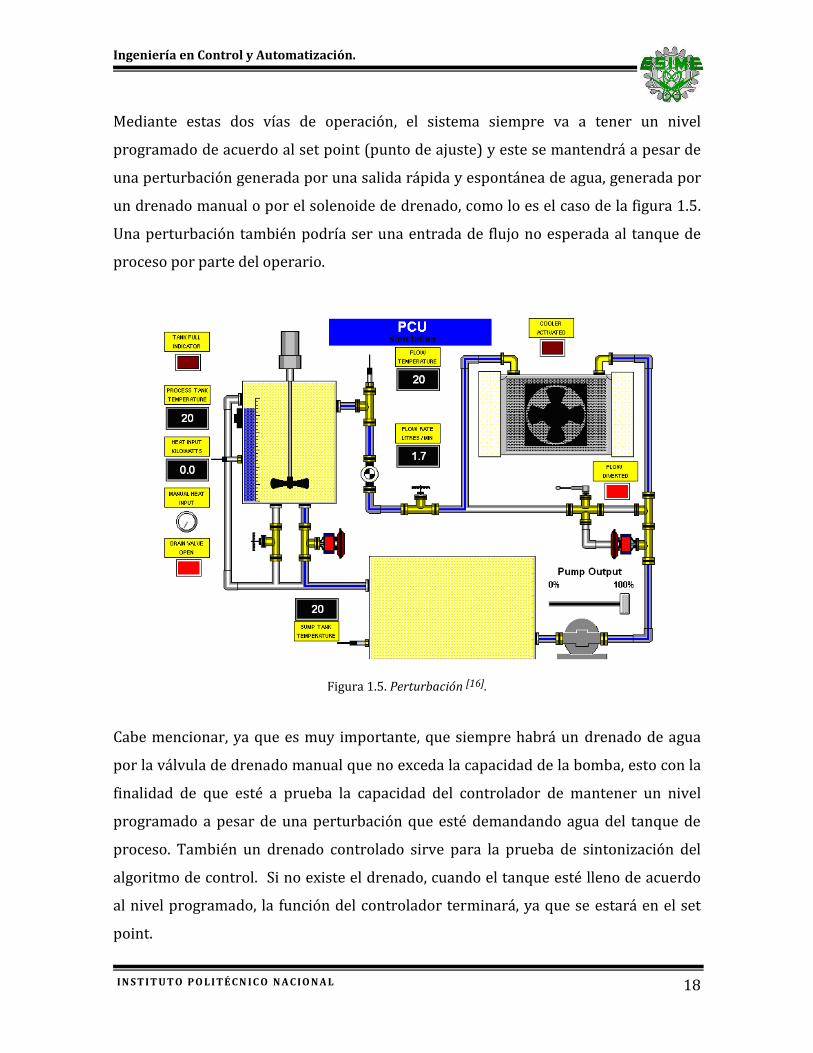
Mediante estas dos vías de operación, el sistema siempre va a tener un nivel
programado de acuerdo al set point (punto de ajuste) y este se mantendrá a pesar de
una perturbación generada por una salida rápida y espontánea de agua, generada por
un drenado manual o por el solenoide de drenado, como lo es el caso de la figura 1.5.
Una perturbación también podría ser una entrada de flujo no esperada al tanque de
proceso por parte del operario.
Figura 1.5. Perturbación [16].
Cabe mencionar, ya que es muy importante, que siempre habrá un drenado de agua
por la válvula de drenado manual que no exceda la capacidad de la bomba, esto con la
finalidad de que esté a prueba la capacidad del controlador de mantener un nivel
programado a pesar de una perturbación que esté demandando agua del tanque de
proceso. También un drenado controlado sirve para la prueba de sintonización del
algoritmo de control. Si no existe el drenado, cuando el tanque esté lleno de acuerdo
al nivel programado, la función del controlador terminará, ya que se estará en el set
point.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
19
Este prototipo representa un proceso industrial, donde se demanda agua para llevarla
a otros procesos, por esa razón es que se implementa la característica de drenado en
el proceso.
La consideración de no exceder con una perturbación la capacidad de la bomba es
simplemente para que la bomba se dé abasto al llenar el tanque de proceso.
1.2 Sensor de nivel capacitivo.
La función del sensor capacitivo consiste en señalar un cambio de estado, basado
en la variación del estímulo de un campo eléctrico. Los sensores capacitivos detectan
midiendo el cambio en la capacitancia, la cual depende de la constante dieléctrica del
material a detectar, su masa, tamaño y distancia hasta la superficie sensible del
detector. Los sensores capacitivos pueden detectar materiales conductores y no
conductores, en forma líquida o sólida. Existen distintas aplicaciones, incluso control
de nivel en depósitos.
En la gama de los sensores capacitivos para líquidos se pueden encontrar los que son
usados para medir nivel de agua, aceite, adhesivos, pinturas, químicos no abrasivos y
abrasivos.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
20
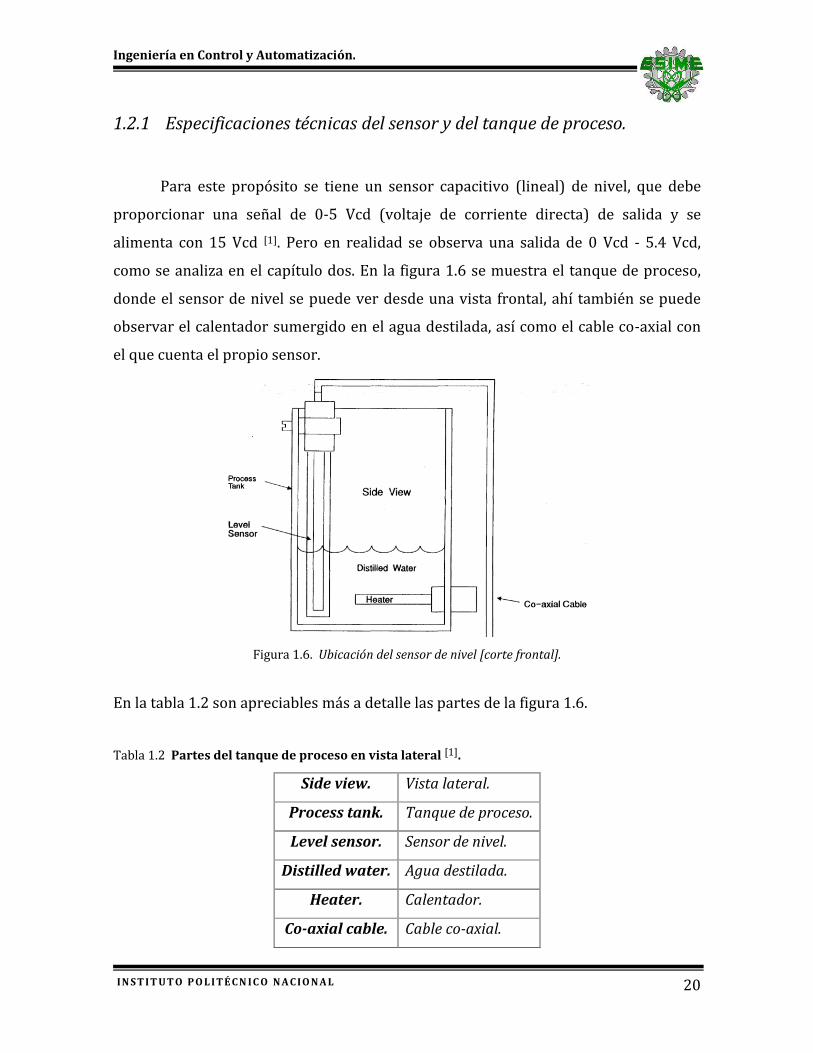
1.2.1 Especificaciones técnicas del sensor y del tanque de proceso.
Para este propósito se tiene un sensor capacitivo (lineal) de nivel, que debe
proporcionar una señal de 0-5 Vcd (voltaje de corriente directa) de salida y se
alimenta con 15 Vcd [1]. Pero en realidad se observa una salida de 0 Vcd - 5.4 Vcd,
como se analiza en el capítulo dos. En la figura 1.6 se muestra el tanque de proceso,
donde el sensor de nivel se puede ver desde una vista frontal, ahí también se puede
observar el calentador sumergido en el agua destilada, así como el cable co-axial con
el que cuenta el propio sensor.
Figura 1.6. Ubicación del sensor de nivel [corte frontal].
En la tabla 1.2 son apreciables más a detalle las partes de la figura 1.6.
Tabla 1.2 Partes del tanque de proceso en vista lateral [1].
Side view. Vista lateral.
Process tank. Tanque de proceso.
Level sensor. Sensor de nivel.
Distilled water. Agua destilada.
Heater. Calentador.
Co-axial cable. Cable co-axial.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
21
Desde otra vista del tanque se puede apreciar en la figura 1.7 la vista superior del
sensor y algunos elementos del propio elemento, como lo son la abrazadera de
plástico con el perno y la tuerca que lo sostienen.
Figura 1.7 Ubicación del sensor de nivel [vista superior].
En la tabla 1.3 son apreciables más a detalle las partes de la figura 1.7.
Tabla 1.3 Partes del tanque de proceso en vista superior [1].
Heating element. Elemento calentador.
Process tank. Tanque de proceso.
Water inlet. Entrada de agua.
Plastic clamp. Abrazadera de plástico.
Level sensor. Sensor de nivel
M3 Bolt. Perno.
M3 Nyloc nut. Tuerca de fijación de nylon de relleno.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
22
Al usar este dispositivo en un tanque calentador hay que considerar la temperatura y
el rango de temperatura para este sensor es de -250C hasta +750C [1].
El tanque de proceso tiene un volumen de 2.94 litros, el cual es obtenido a partir de
las dimensiones del mismo como se muestra en la ecuación 1.1
Las dimensiones internas del tanque de proceso, hasta el drenado de sobreflujo son
las siguientes.
Largo: 14 centímetros.
Ancho: 14 centímetros.
Alto: 15 centímetros (hasta el drenado de sobreflujo).
33
3 3
arg (14 )(14 )(15 )
1 10002940 2.94
1000000 1
Volumen l o ancho alto cm cm cm
m lVolumen cm l
cm m
………………………….. (ec.1.1)
Ecuación 1.1 Fórmula para el cálculo del volumen del tanque de proceso.
La multiplicación del largo por el ancho y por el alto denota el volumen en centímetros
cúbicos del tanque; posteriormente se hace la analogía de que en un metro cúbico hay
un millón de centímetros cúbicos, con la finalidad de obtener por medio de una
multiplicación un resultado en metros cúbicos del volumen del tanque de proceso;
posteriormente se hace otra analogía de la cantidad de mil litros en un metro cúbico,
dando como resultado de otra multiplicación por este factor de conversión un
volumen en litros.
Con el resultado anterior se define el volumen en litros del tanque de proceso.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
23
La equivalencia física de los 5.4 Vcd de salida, correspondientes al llenado total del
tanque, refieren a un nivel determinado, el cual se ha mencionado en las
especificaciones del tanque y que son los 15 centímetros de altura o 2.94 litros.
El tanque sin drenado se llena con respecto a una relación lineal de 5.4 Vcd en 135
segundos, por lo que se puede decir que esa relación se conserva para los 15
centímetros de nivel máximo con respecto a los mismos 135 segundos para alcanzar
este nivel. De lo anterior se puede deducir una función de primer grado, como se
muestra en la ecuación 1.2, que permita hacer la equivalencia de los 15 centímetros de
llenado del tanque, con respecto al tiempo en que sucede.
yy x b
x
………………………………(ec.1.2)
Ecuación 1.2 Ecuación de la recta
La ecuación antes citada se puede desarrollar tomando en cuenta para el eje y, la
altura del tanque (la diferencia entre el valor de comienzo y el valor de llenado total,
en centímetros) y para el eje x, el tiempo de llenado (la diferencia entre el valor de
comienzo y el valor de llenado total, en segundos); lo cual queda como se muestra en
el siguiente desarrollo perteneciente a la ecuación 1.3.
(15 0 )
(135 0 )
0.1111
0 0.1111(0 )
0
cm cmy x b
s s
y x b
cm s b
b
0.1111y x ……………………..………… (ec.1.3)
Ecuación 1.3 Relación lineal, tiempo para el llenado del tanque - nivel,
[sin drenado y sin tiempo muerto]
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
24
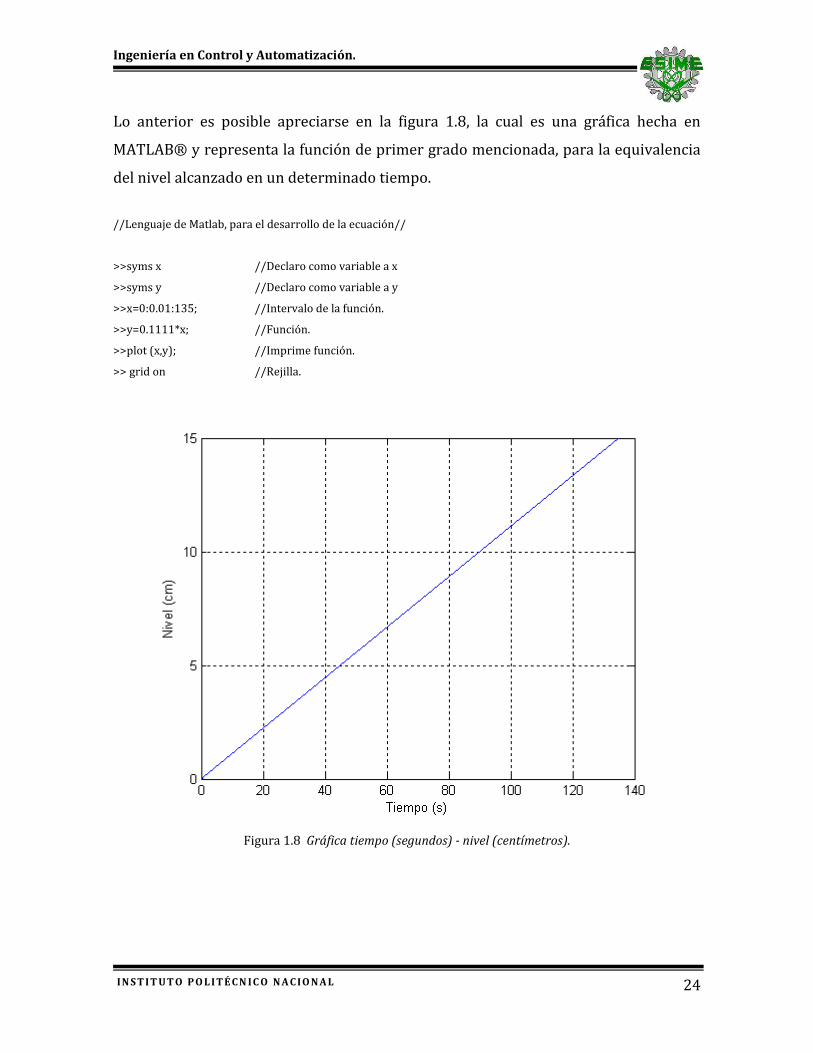
Lo anterior es posible apreciarse en la figura 1.8, la cual es una gráfica hecha en
MATLAB® y representa la función de primer grado mencionada, para la equivalencia
del nivel alcanzado en un determinado tiempo.
//Lenguaje de Matlab, para el desarrollo de la ecuación//
>>syms x //Declaro como variable a x
>>syms y //Declaro como variable a y
>>x=0:0.01:135; //Intervalo de la función.
>>y=0.1111*x; //Función.
>>plot (x,y); //Imprime función.
>> grid on //Rejilla.
Figura 1.8 Gráfica tiempo (segundos) - nivel (centímetros).

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
25
Otra relación directa es la de los 5.4 Vcd de salida, con respecto a los 15 centímetros
de llenado del tanque, lo cual se puede apreciar en la ecuación 1.4 la cual deriva de la
ecuación 1.2 y muestra el desarrollo para encontrar la función de primer orden que
permite hacer la conversión de centímetros a volts.
La ecuación antes citada se puede desarrollar tomando en cuenta para el eje y, la
salida de 5.4 Vcd del sensor (la diferencia entre el valor de comienzo y el valor de
llenado total, en volts) y para el eje x, la altura del tanque (la diferencia entre el valor
de comienzo y el valor de llenado total, en centímetros); lo cual queda como se
muestra en el siguiente desarrollo.
(5.4 0 )
(15 0 )
5.4
15
5.40 (0 )
15
0
v vy x b
cm cm
y x b
v cm b
b
5.4
15y x ……………………………...…. (ec.1.4)
Ecuación 1.4 Relación lineal, nivel (centímetros) - nivel (volts),
[detectados por el sensor en el llenado del tanque]
Para las ecuaciones 1.3 y 1.4 se ha considerado el valor de [b] igual a cero, debido a
que en ambas gráficas el inicio está en el origen y no están desplazadas hacia alguna
parte del plano cartesiano.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
26
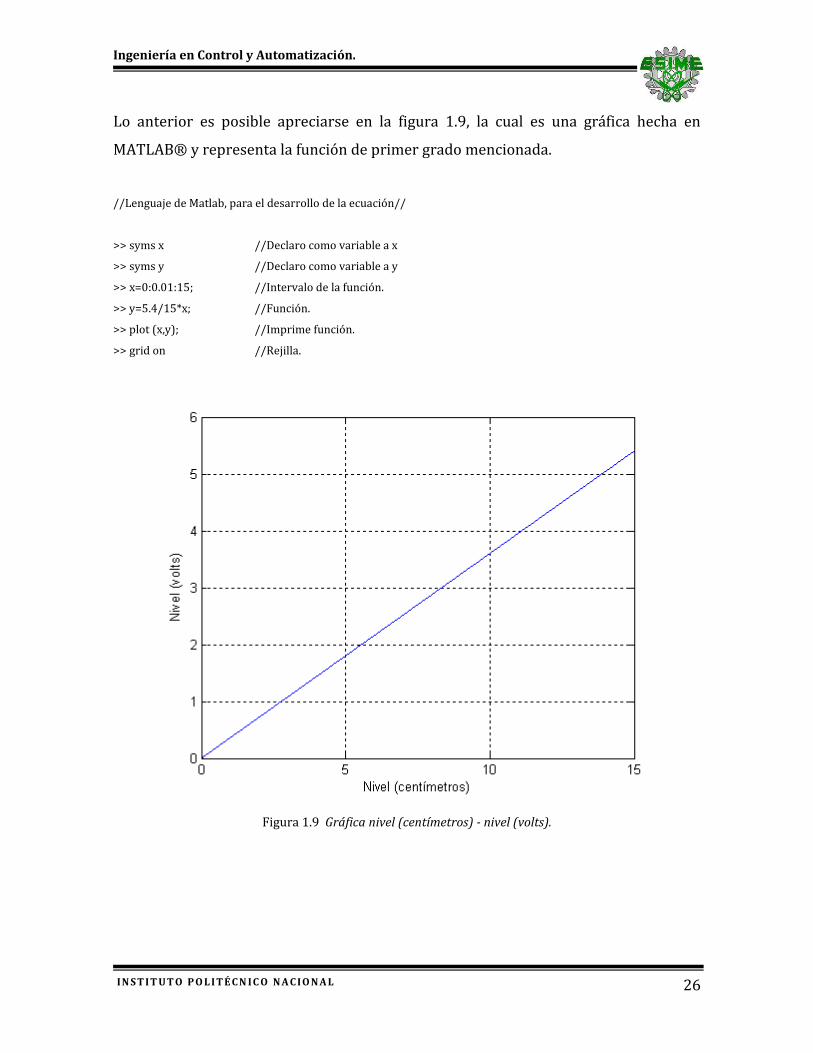
Lo anterior es posible apreciarse en la figura 1.9, la cual es una gráfica hecha en
MATLAB® y representa la función de primer grado mencionada.
//Lenguaje de Matlab, para el desarrollo de la ecuación//
>> syms x //Declaro como variable a x
>> syms y //Declaro como variable a y
>> x=0:0.01:15; //Intervalo de la función.
>> y=5.4/15*x; //Función.
>> plot (x,y); //Imprime función.
>> grid on //Rejilla.
Figura 1.9 Gráfica nivel (centímetros) - nivel (volts).

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
27
1.3 Análisis de la señal del sensor capacitivo.
El trabajo de tesis pretende seleccionar un algoritmo de control que permita
mantener un nivel deseado en el tanque de proceso. Por esta razón se tiene que
conocer a la perfección el sensor que permite hacer la medición correcta de nivel.
La señal que proporciona el sensor es la que se muestra a continuación en la figura
1.10 y que representa la señal obtenida con un osciloscopio referente al llenado del
tanque desde 0 Vcd hasta obtener 5.4 Vcd, con un drenado controlado de 0.666
litros/minuto en la válvula de drenado manual, referente a la apertura del 50% de la
válvula.
Figura 1.10 Señal de salida del sensor de nivel.
La oscilación que presenta es debido a que los detectores capacitivos están
construidos en base a un oscilador RC. Debido a la influencia del objeto a detectar y
del cambio de capacitancia, la amplificación se incrementa haciendo entrar en
oscilación el oscilador. La señal de salida del oscilador alimenta otro amplificador, el
cual a su vez pasa la señal a la etapa de salida.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
28
Como se ha mencionado en las especificaciones técnicas, el sensor tiene un valor
máximo de 5.4 Vcd de salida, pero la oscilación genera un rizado que es corregible
mediante un potenciómetro, el cual sirve para no generar un factor potencial de falla
cuando el sensor es conectado al controlador, pero para el diseño de una función de
transferencia a partir de la respuesta física del sistema, este rizado es factor de falla,
aún conociendo las características del sensor y del proceso, por esta razón se hace el
diseño del filtro.
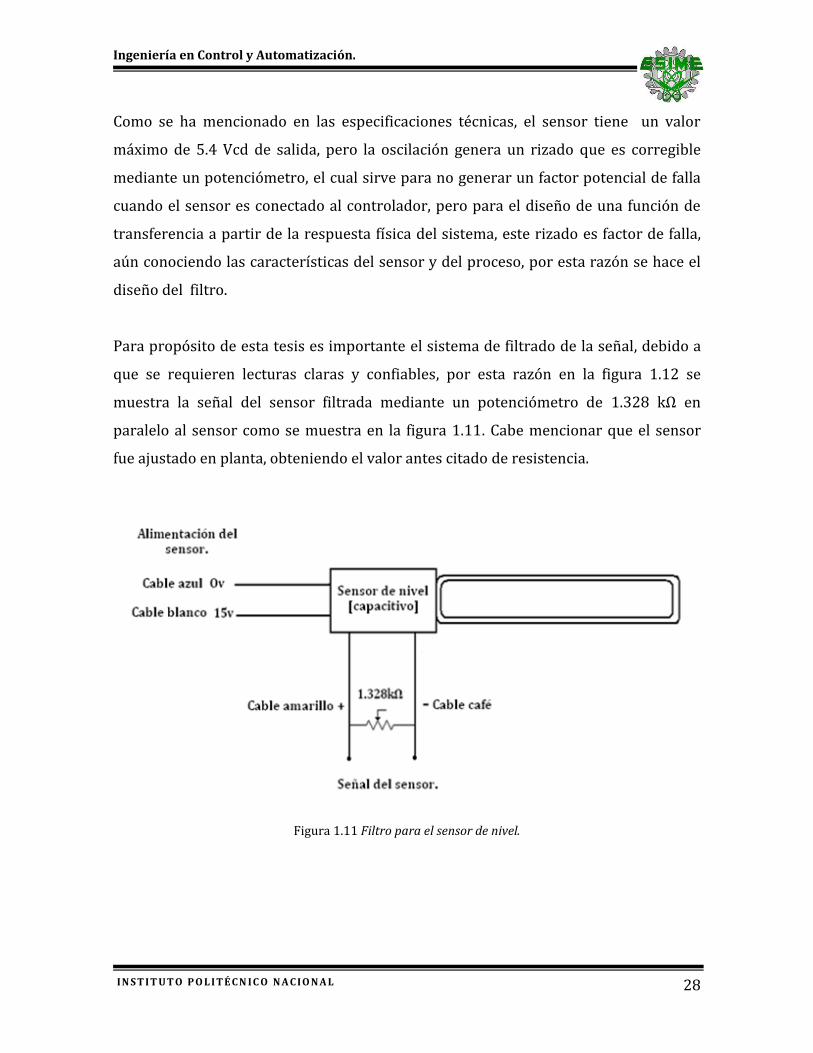
Para propósito de esta tesis es importante el sistema de filtrado de la señal, debido a
que se requieren lecturas claras y confiables, por esta razón en la figura 1.12 se
muestra la señal del sensor filtrada mediante un potenciómetro de 1.328 kΩ en
paralelo al sensor como se muestra en la figura 1.11. Cabe mencionar que el sensor
fue ajustado en planta, obteniendo el valor antes citado de resistencia.
Figura 1.11 Filtro para el sensor de nivel.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
29
La figura 1.12 a diferencia de la figura 1.10, esta filtrada, como se puede apreciar.
Figura 1.12 Señal filtrada del sensor de nivel.
Esta señal es el punto de partida para el cálculo del los parámetros del controlador, el
cual se muestra en capítulos posteriores de esta tesis.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
30
1.4 Capacidad de la bomba o actuador.
El flujo volumétrico de la bomba se obtiene a partir de los parámetros obtenidos de la
respuesta del sistema y la relación mostrada en la ecuación 1.5.
Los parámetros y consideraciones son los siguientes.
Volumen del tanque: 2.94 litros.
Tiempo de llenado sin drenado: 135 segundos.
El tanque de 2.94 litros se llena en 135 segundos, por lo que en 60 segundos se llena:
2.94 135
[ ] 60
l s
x l s
2.94 60[ ] 1.30
135
l sx l l
s
……………………..….. (ec.1.5)
Ecuación 1.5 Ecuación para determinar el flujo volumétrico de la bomba.
Por lo tanto se tiene un flujo volumétrico de 1.3 litros por minuto.
Originalmente la bomba tenía un desempeño mayor, ya que su capacidad era de 1.7
litros/minuto; pero al paso de los años y de la falta de mantenimiento se ha visto
mermado el desempeño de dicho elemento.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
31
1.5 Análisis de la señal óptima para el actuador.
El actuador es una bomba del tipo centrífuga accionada por un motor de corriente
directa, que necesita una alimentación de 12 Vcd y demanda una corriente máxima de
6 A (amperes), proporcionando un flujo volumétrico lineal de 1.3 litros/minuto, que
son tomados de un tanque de abastecimiento que puede almacenar hasta 7 litros [1].
La bomba también tiene una función de primer orden que describe su
comportamiento en relación del voltaje de alimentación contra flujo. Donde a partir de
la ecuación 1.2 se puede describir lo siguiente.
Para el eje y, se tiene el flujo de la bomba (la diferencia entre el valor mínimo de flujo
contra el valor máximo de flujo) y para el eje x, el voltaje de alimentación (la
diferencia entre el valor mínimo contra el valor máximo de alimentación de la
bomba); lo cual queda como se muestra en el siguiente desarrollo perteneciente a la
ecuación 1.6.
(1.3 / 0 / )
(12 0 )
1.3
12
1.30( / ) (0 )
12
0
l m l my x b
v v
y x b
l m v b
b
1.3
12y x ........………….………………….... (ec.1.6)
Ecuación 1.6 Relación lineal, voltaje de alimentación - flujo de salida de la bomba.
De igual forma que en las 1.3 y 1.4, se ha considerado el valor de [b] igual a cero,
debido a que el inicio está en el origen.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
32
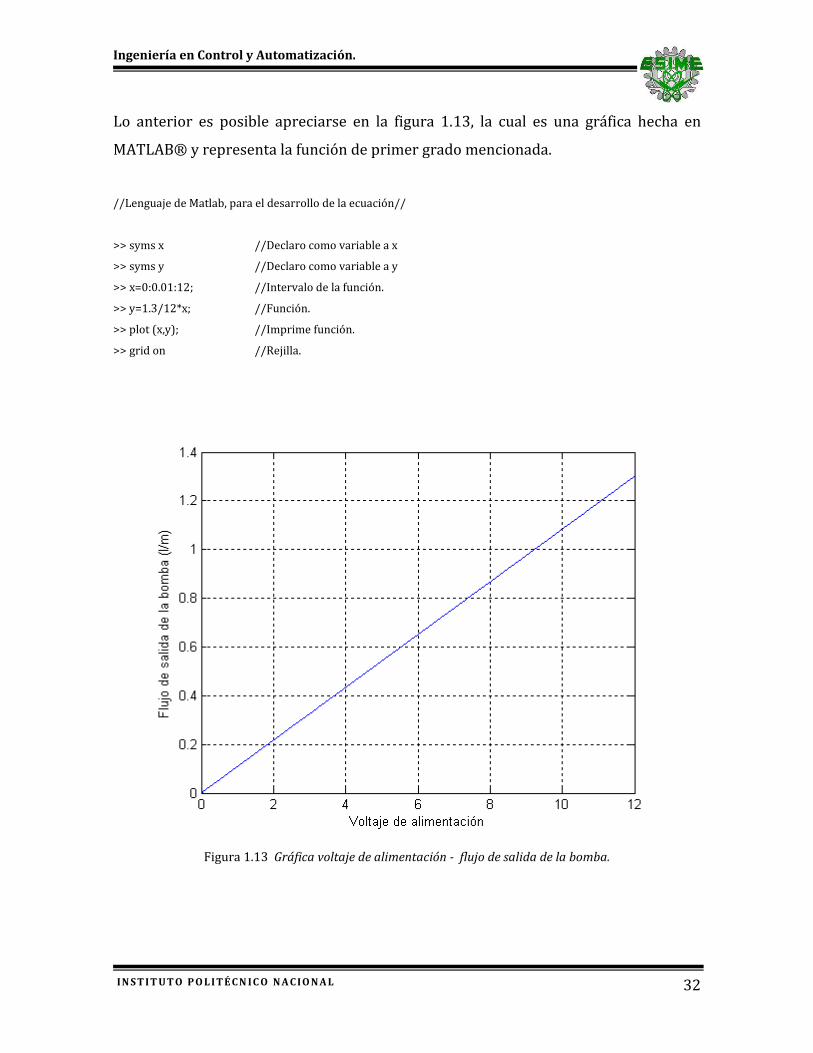
Lo anterior es posible apreciarse en la figura 1.13, la cual es una gráfica hecha en
MATLAB® y representa la función de primer grado mencionada.
//Lenguaje de Matlab, para el desarrollo de la ecuación//
>> syms x //Declaro como variable a x
>> syms y //Declaro como variable a y
>> x=0:0.01:12; //Intervalo de la función.
>> y=1.3/12*x; //Función.
>> plot (x,y); //Imprime función.
>> grid on //Rejilla.
Figura 1.13 Gráfica voltaje de alimentación - flujo de salida de la bomba.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
33
La implementación de algoritmo de control en un PIC, tiene como resultado la parte
de control de un sistema, pero la señal de control no es lo suficientemente fuerte para
hacer que un elemento final de control, como lo es la bomba pueda moverse. Por esta
razón se implementará un MOSFET para la parte de potencia, el cual en conjunto con
el PIC, tendrá la tarea de accionar a la bomba según convenga.
La variación en la cantidad de energía entregada a la bomba se hará por PWM, (Pulse
Width Modulation), modulación por ancho de pulso. La modulación del ancho de pulso
de una señal o fuente de poder involucra la modulación del ciclo de trabajo para
controlar la cantidad de energía que la fuente entrega.
La modulación por ancho de pulso utiliza un tren de pulsos cuyo ciclo de trabajo es
modulado, mientras su período permanece constante, resultando en la variación del
promedio del valor de la señal.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
34
Capítulo 2 [Algoritmo de control y controlador]

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
35
Capítulo 2
El control es de vital importancia en el mundo de la ingeniería, además de
resultar imprescindible en sistemas robóticos o procesos de manufactura moderna,
entre otras aplicaciones, se ha vuelto esencial en operaciones industriales como el
control de nivel, presión, temperatura, humedad, viscosidad y flujo en las industrias
de transformación.
Un controlador es un dispositivo basado en hardware y software, que funciona
mediante el monitoreo de una señal de error, que es la diferencia entre los valores
establecidos (el valor de nivel, temperatura, velocidad etc. que se requiere que el
controlador mantenga) y los valores reales o medidos. La combinación del sistema a
controlar y el controlador empleado tienen generalmente una disposición de lazo
cerrado.
En el punto de ajuste se establece el valor deseado del parámetro y se realiza la
diferencia del valor real con el valor deseado y este valor de error [E] es pasado al
controlador, el cual responde de acuerdo a su implementación, el controlador pasa su
respuesta al elemento final de control, que puede ser una bomba o válvula, entonces,
el sensor mide el valor del parámetro y dicho valor es enviado al punto [E] donde se
realiza la diferencia o señal de error. El hecho de que la salida del controlador esté
conectada con su misma entrada le confiere la naturaleza de sistema cerrado o
retroalimentado.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
36
2.1 Selección del algoritmo de control.
Para fines de control de nivel, un algoritmo PID es implementado al
controlador. La tesis pretende ser instrumento de enseñanza, por tal motivo se
plantea este algoritmo como un método de prueba para el control de nivel.
El controlador con el algoritmo PID permite mantener el nivel en el tanque de proceso
y se usa este, ya que el controlador PID (Proporcional, Integral y Derivativo) es un
controlador realimentado cuyo propósito es hacer que el error en estado estacionario,
entre la señal de referencia y la señal de salida de la planta, sea cero.
El modo proporcional ajusta la señal de salida en proporción directa a la
entrada del controlador (que es la señal de error).
El modo integral corrige cualquier desplazamiento (error), que pueden ocurrir entre
el valor deseado (punto de referencia) y la salida del proceso de forma automática con
el tiempo, eliminando el error en el régimen permanente. Da una salida del
controlador que es proporcional al error acumulado. Aquí se da el efecto Windup;
como la integral resulta de la sumatoria de los errores de cada ciclo, se corre el riego
de saturar la integral para valores de error relativamente grandes, lo que trae
oscilaciones bruscas y el problema de que al tener la sumatoria un valor grande, se
hace mayor el tiempo necesario para reducir la suma cuando se reduce el error. Para
evitar esto se hace trabajar a la integral sólo dentro de valores de posición cercanos a
la posición deseada de modo de integrar sólo errores pequeños.
También el controlador PID tiene la capacidad de anticipar el futuro a través de la
acción derivativa que tiene un efecto predictivo sobre la salida del proceso.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
37
Los controladores PID son suficientes para resolver el problema de control de muchas
aplicaciones, particularmente cuando las dinámicas de los procesos son de primer y
segundo orden.
La representación matemática del PID [10] es mostrada en la ecuación 2.1 en el
dominio del tiempo y en la ecuación 2.2 en el dominio de la frecuencia.
( ) ( ) ( ) ( )u t kpe t kd e t ki e t dt ………………...………..……………….. (ec.2.1)
Ecuación 2.1 PID en el dominio del tiempo.
( ) 11
( )D
U s kikp T s kp kds
E s Tis s
………………..…………………... (ec.2.2)
Ecuación 2.2 PID en el dominio de la frecuencia.
En las ecuaciones anteriores y en ecuaciones posteriores del capítulo tres se observan
los siguientes parámetros.
[u(t),U(s),U(z)] Salida del controlador.
[e(t),E(s), E(z)] Error.
[kp] Constante del control proporcional.
[kd] Constante del control diferencial.
[ki] Constante del control integral.
[Ti] Tiempo integral.
[TD] Tiempo derivativo.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
38
2.2 Parámetros para la sintonización del PID.
Para sintonizar un PID se tienen que obtener ciertos parámetros del sistema que
permitan hacer el cálculo de ese algoritmo, especialmente cuando se requiere hacer la
sintonización de Ziegler-Nichols a lazo abierto, la cual se hace sin la acción de un
controlador y sin retroalimentación [2], tal y como queda ejemplificado en la figura 2.1.
Cabe resaltar que este método es muy usado en la industria, ya que arroja resultados
de manera muy rápida, certera y segura.
Figura 2.1. Prueba a lazo abierto.
La prueba de campo se realiza de la siguiente manera:
a) Cerrado del 50% de la válvula de drenado manual (permitiendo un drenado de
0.666 litros/minuto), apagado del solenoide de drenado del tanque y cerrado
de la válvula de purgado de la bomba.
b) Alimentación del sensor de nivel y conexión del osciloscopio a la salida del
sensor de nivel.
c) Puesta en marcha de la bomba a su máxima capacidad 12 Vcd, (1.3
litros/minuto)
d) Llenado del tanque desde 0 Vcd hasta 5.4 Vcd de señal de salida del sensor o
15 centímetros de nivel o 2.94 litros.
e) Toma de lectura.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
39
La toma de lectura es la parte más relevante, ya que es de donde se extraen los
parámetros para el cálculo del PID.
La señal que a continuación se muestra en la figura 2.2, es la señal recibida por el
osciloscopio, al lazo referente a nivel, dentro del RT-210 Process Control RIG.
Figura 2.2. Señal del sensor de nivel.
De esta señal se obtienen los datos esenciales para construir la función de
transferencia, con la cual se trabaja para calcular el PID.
La función de transferencia se construye con la finalidad de hacer la respuesta del
sistema más manejable mediante MATLAB Simulink®, ya que al manejar la respuesta
del sistema directamente como la arroja el osciloscopio puede generar errores al
momento de aplicar el método citado para el cálculo del PID.
Cabe resaltar que la respuesta tomada por el osciloscopio y la creada a partir de la
función de transferencia deben permanecer idénticas en cuestión a características de
comportamiento del sistema.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
40
Analizando la gráfica se puede observar el comportamiento de la señal y se pueden
deducir los parámetros necesarios y requeridos para el cálculo del PID.
El osciloscopio está configurado para mostrar la señal a 50 segundos por división en el
eje x y a 2 volts por división en el eje y. La resolución para el tiempo es de 10 segundos
y la resolución del eje y, correspondiente para voltaje es de 2/5 de volt. El término de
resolución es el definido para el mínimo valor que se puede encontrar entre los
puntos de los ejes cartesianos del osciloscopio.
Se tienen 13.5 segmentos de 2/5 de volt, en base observaciones de la respuesta del
osciloscopio. El voltaje se obtiene a partir de lo mostrado en la ecuación 2.3
213.5 5.4
5V v …………...………..……… (ec.2.3)
Ecuación 2.3 Ecuación para calcular la magnitud de la señal del sensor de nivel.
Más aparte se tiene un tiempo de estabilización de 142 segundos (51 ) y un tiempo
muerto de 7 segundos.
La función de transferencia (FDT) para el nivel es de 1er. orden. Y la forma de una
función de transferencia para sistemas de primer orden es la mostrada en la ecuación
2.4.
1
( )
( ) 1
dsTY S Ke
U S s
…………...………..……… (ec.2.4)
Ecuación 2.4 Función de transferencia para sistemas de 1er. orden

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
41
Donde:
[K] Es la ganancia del proceso, la cual es la razón de cambio de la variable de salida,
con respescto a la razón de cambio de la entrada, como se muestra en la ecuación 2.5
5.44.1538
1.3 /
S VK
E l m
……….…....………..… (ec.2.5)
Ecuación 2.5 Ganancia de proceso.
[dT ] Es el tiempo muerto, el cual indica el retardo que sufre la variable de salida, ante
un cambio a la entrada.
[1 ] Es la constante de tiempo y es la que determina la velocidad de respuesta de la
variable controlada; un sistema evoluciona en 51 . Nuestro sistema evolucionó en 142
segundos, pero se requiere (1 ) y se encuentra como lo muestra la ecuación 2.6
51 =142 s
1
14228.4
5
segundossegundos ………....……….. (ec.2.6)
Ecuación 2.6 Constante de tiempo.
Conociendo estos datos, se construye la función de transferencia; tómese en cuenta
que para el diseño de esta, la unidad de tiempo serán segundos.
La función de transferencia queda de la siguiente manera, tal como lo muestra la
ecuación 2.7
7( ) 4.1538
( ) 28.4 1
sN S e
Fe S s
………....……….…….. (ec.2.7)
Ecuación 2.7 Función de transferencia del sistema de nivel.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
42
Nótese que la variable de salida es nivel y la variable de entrada es flujo, dicho de otra
forma la variable controlada es nivel y la variable manipulada es flujo; de aquí el título
de la tesis.
Se ha mencionado que la FDT es la representación matemática de la planta, que para
este caso es el sistema de nivel en el tanque de proceso, dicha función permanece igual
a la respuesta entregada por el osciloscopio. Lo anterior se muestra en las figuras 2.3 y
2.4, donde se hace uso de MATLAB Simulink® para ver esta característica.
Figura 2.3. Simulación con la función de transferencia.
La figura 2.3 muestra la similitud matemática de la prueba física a lazo abierto que
se hace a la planta para encontrar su respuesta a una entrada. Y así poder
encontrar los parámetros para el cálculo del PID.
Y la figura 2.4 es la respuesta que el sistema presenta, según lo descrito en la figura
2.3.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
43
Figura 2.4. Respuesta de la función de transferencia.
De igual manera que la prueba física, se tiene una entrada de 1.3 litros/minuto que
llega a la planta o proceso y que está representada por la función de transferencia con
su respectivo retraso o tiempo muerto, además se tiene a la salida un osciloscopio que
da la respuesta del sistema.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
44
2.3 Cálculo del PID.
Ahora, para continuar con el cálculo del PID se requiere hacer el trazo de algunas
líneas sobre la respuesta del sistema [2].
Estas líneas permiten encontrar:
TL=Tiempo de retardo.
S=Valor de la pendiente
Lo anterior se conoce en base al valor de la respuesta que el sistema presenta al haber
evolucionado entre el 63.2% [ ] y 28%.
Para saber los valores antes mencionados se toman los 5.4 Vcd, ya que estos
representan el valor máximo de la salida al aplicarle una entrada de 1.3 litros/minuto.
Esto se observa en las ecuaciones 2.8 y 2.9.
63.2% (5.4)(0.632) 3.4128S ….......……..….…… (ec.2.8)
Ecuación 2.8 Evolución de la respuesta al 63.2% [ ]
28% (5.4)(0.28) 1.512S …....…………..….…… (ec.2.9)
Ecuación 2.9 Evolución de la respuesta al 28%
Lo principal es encontrar el valor de la pendiente, el cual se calcula como se muestra
en la ecuación 2.10
(3.4128 1.512)1.512 2.4624
2S
...………..….… (ec.2.10)
Ecuación 2.10 Cálculo del valor de la pendiente.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
45
Con los datos antes mencionados se trazan líneas, como se muestra en la figura 2.5
Figura 2.5. Obtención de parámetros del sistema.
Con los parámetros definidos por los trazos en la respuesta del sistema más la ayuda
de la siguiente tabla y sus respectivas ecuaciones, se calcula el PID.
Tabla 2.1 Parámetros para el cálculo del PID.
PID
kp Ti TD ki kd
1.2
L
kpT S
Ecuación 2.11
Constante del
control
proporcional.
2.2 LTi T
Ecuación 2.12
Tiempo de
integración.
0.5D LT T
Ecuación 2.13
Tiempo
derivativo.
kpki
Ti
Ecuación 2.14
Constante del
control
integral.
Dkd kp T Ecuación 2.15
Constante del
control
derivativo.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
46
Los datos más importantes son los siguientes:
TL=7 segundos.
S2.5 volts.
Y se continua con el siguiente procedimento para obtener los valores finales del
cálculo del PID.
-Se toma la ecuación de kp de la tabla 2.1
1.2 1.20.068
7 2.5L
kpT S
...…….……....….… (ec.2.16)
Ecuación 2.16 Cálculo de la constante del control proporcional.
-Se toma la ecuación de Ti de la tabla 2.1
2.2 2.2 7 15.4LTi T ...…….……....….… (ec.2.17)
Ecuación 2.17 Cálculo del tiempo de integración.
-Se toma la ecuación de Td de la tabla 2.1
0.5 0.5 7 3.5D LT T .…………………..… (ec.2.18)
Ecuación 2.18 Cálculo del tiempo derivativo.
-Se sustituye el valor de kp y Ti en la ecuación 2.14, para encontrar ki.
30.0684.415 10
15.4
kpki
Ti
.………………..… (ec.2.19)
Ecuación 2.19 Cálculo de la constante del control integral.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
47
-Se sustituye el valor de kp y Td en la ecuación 2.15, para encontrar kd.
0.068 3.5 0.238kd kp Td .……..……..…..… (ec.2.20)
Ecuación 2.20 Cálculo de la constante del control derivativo.
[kp, kd y ki] son los valores necesarios para el PID, el cual queda como lo muestra la
ecuación 2.21
3( ) 1 4.415 100.068 1 3.5 0.068 0.238
( ) 15.4
U sPID S S
E s S S
…….… (ec.2.21)
Ecuación 2.21 PID calculado para el control del sistema de nivel.
En la figura 2.6 se observa el lazo cerrado, en el cual se tiene la planta, el controlador
previamnete calculado y un punto de ajuste o set point de 3. Lo anterior se simula con
MATLAB Simulink® para ver la respuesta del sistema al ponerle dicho controlador.
Figura 2.6. Lazo de control cerrado.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
48
Lo que representa el punto de ajuste, es que sin importar que haya una entrada de
flujo que rebase el equivalente a los 3 volts de salida del sensor, el controlador hará
los ajustes necesarios para que el sistema se mantenga en 3 volts de salida. Este valor
puede variar según sea el requerimiento del sistema. Se hace el uso de volts y no del
equivalente a centímetros, debido a que el diseño físico del controlador, o sea un PIC,
va a tomar la señal del sensor en volts y no en centímetros. Por esa razón también se
usarón volts para el diseño de la FDT . La ecuación que describe la equivalencia de
volts a centímetros es la ecuación 1.3 del capítulo uno.
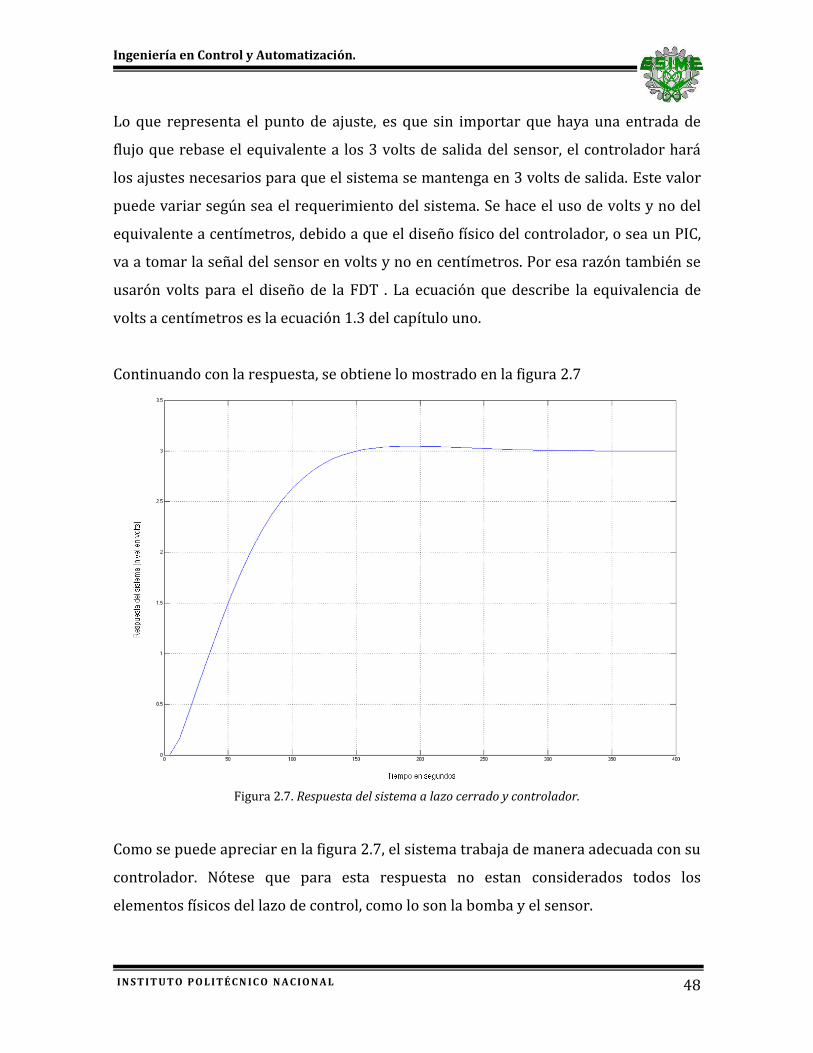
Continuando con la respuesta, se obtiene lo mostrado en la figura 2.7
Figura 2.7. Respuesta del sistema a lazo cerrado y controlador.
Como se puede apreciar en la figura 2.7, el sistema trabaja de manera adecuada con su
controlador. Nótese que para esta respuesta no estan considerados todos los
elementos físicos del lazo de control, como lo son la bomba y el sensor.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
49
El siguiente paso es cerrar el lazo de control de una forma estructural, quedando como
se muestra en la figura 2.8, para posteriormente hacerlo desde el punto de vista de un
sistema de control dimensionado.
Figura 2.8. Lazo de control cerrado.
Como anteriormente se menciona, una parte importane es el dimensionamiento del
lazo de control, el cual muestra las repuestas de todos los elementos presentes en
dicho lazo, como se muestra en la figura 2.9.
Cabe mencionar que para el dimensionamiento del sistema, así como para la
implemtación en las líneas de programación del PIC, que posteriormente se observan
en el capítulo tres, se toma 5 Vcd (equivalentes a 13.8814 centímetros de llenado)
como el valor máximo aceptable para set point; no de esta manera para la obtención
de la función de transferencia, la cual fue diseñada a partir de los 5.4 Vcd de salida del
sensor (equivalentes a 15 centímetros de llenado), esto para cubrir con la totalidad de
la respuesta del sistema. El hecho de ocupar como valor máximo los 5 Vcd surge de la
necesidad y los requerimientos que el sistema de control físico PIC, tiene como rango
o tolerancia de recepcion de señales de entrada, además de no dejar el tanque de
llenado al tope con un probable set point de 5.4 Vcd.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
50
Figura 2.9. Dimensionamiento del sistema.
Se usa Matlab® para describir el dimensionamiento que a continuación se describe.
a) En el primer segmento se usa un set point en centímetros, ya que enseguida de él
se encuentra la ecuación de primer orden que hace el escalado de centímetros a
volts según la ecuación 1.4.
b) Esta el controlador con algoritmo PID.
c) Luego esta la etapa de potencia para hacer el escalado de los 5 Vcd máximos de
salida del controlaodor a 12 Vcd de alimentación de la bomba.
d) Enseguida esta la ecuación de primer orden que hace el escalado de volts a flujo,
por parte de la bomba, como lo ejemplifica la ecuación 1.6.
e) Enseguida esta la planta representada por la función de transferencia, que tiene
una entrada de flujo y proporciona un nivel determinado de salida.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
51
f) Posteriormente esta el tiempo muerto o de retraso.
g) En la retroalimentación esta un escalado a uno de la señal de salida del sensor de
nivel, a la entrada del controlador. El escalado es unitario ya que la salida máxima
del sensor, como se explicó anteriormente será de 5 Vcd y la entrada del
controlador es de 5 Vcd [7], por esa razón no se escala a un grado mayor.
h) Al final se tiene un osciloscopio que registra el comportamiento del sistema, como
se muestra en la figura 2.10.
Figura 2.10. Respuesta del sistema dimensionado.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
52
2.4 Análisis del funcionamiento del controlador.
Ahora, el primer punto con respecto al análisis de resultados, es ver si realmente el
controlador diseñado funciona como se ha planteado.
En la figura 2.11 se muestra el lazo de control cerrado y dimensionado, con la
particularidad de tener una perturbación de flujo de entrada de 0.2 litros
directamente hacia la planta y tiempo después una perturbación de salida de flujo de
0.3 litros.
Figura 2.11 Lazo de control con perturbaciones.
La acción del controlador es corregir las perturbaciones y mantener lo programado en
el set point o punto de ajuste. La figura 2.12 muestra el efecto que tiene el controlador
sobre la planta.
Nótese que se programa un set point de 9 centímetros, los cuales son convertidos a
volts mediante la ecuación 1.4, previamente programada en el lazo de control.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
53
También nótese que internamente el lazo de control trabaja con niveles de voltaje, ya
que físicamente el controlador así lo hace y que la ecuación 1.4 es para mera
referencia de conversión.
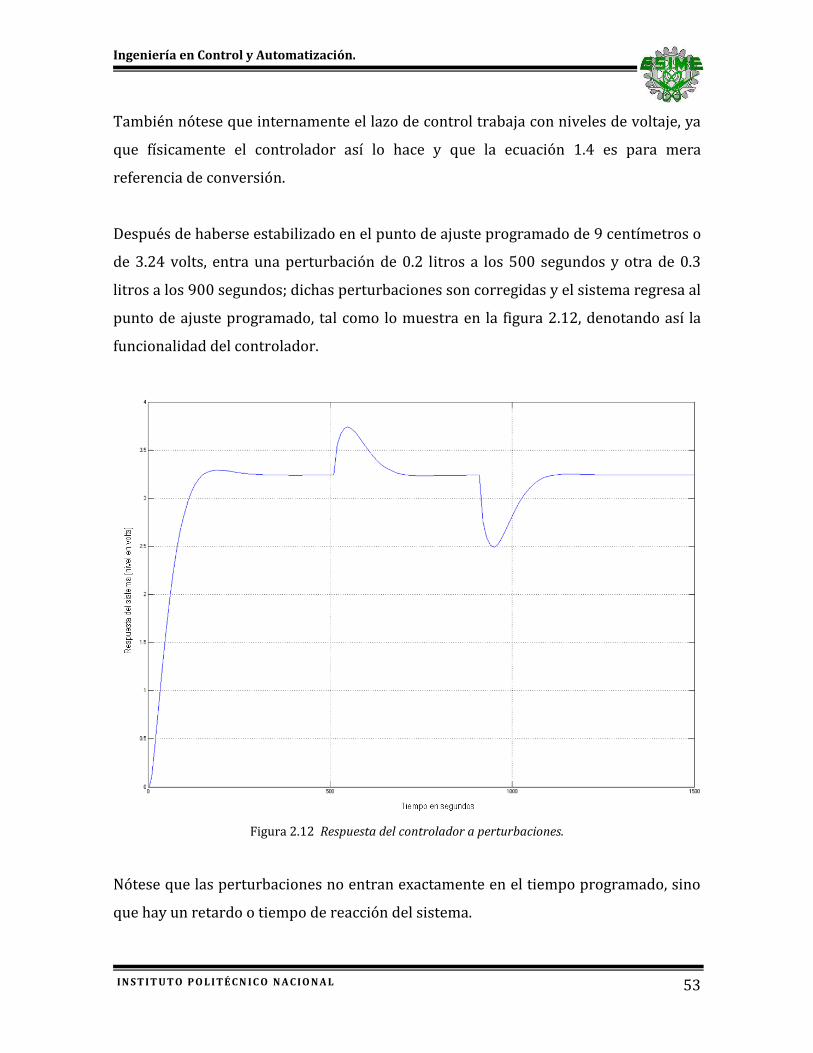
Después de haberse estabilizado en el punto de ajuste programado de 9 centímetros o
de 3.24 volts, entra una perturbación de 0.2 litros a los 500 segundos y otra de 0.3
litros a los 900 segundos; dichas perturbaciones son corregidas y el sistema regresa al
punto de ajuste programado, tal como lo muestra en la figura 2.12, denotando así la
funcionalidad del controlador.
Figura 2.12 Respuesta del controlador a perturbaciones.
Nótese que las perturbaciones no entran exactamente en el tiempo programado, sino
que hay un retardo o tiempo de reacción del sistema.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
54
Capítulo 3 [Implementación del PID en un PIC, comunicación y software para
monitoreo]

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
55
Capítulo 3
Los microcontroladores son microprocesadores de propósito general que tienen
partes adicionales que les permiten el control de dispositivos externos. Básicamente,
un microcontrolador ejecuta un programa de usuario que se carga en su memoria de
programa. Bajo el control de este programa, se reciben datos desde dispositivos
externos o entradas, posteriormente manipula y envía los datos a los dispositivos de
salida. Un microcontrolador es una herramienta muy poderosa que permite a un
diseñador crear sofisticados algoritmos para control.
La arquitectura del microcontrolador simple consiste en un microprocesador,
memoria, entradas y salidas (I/O). El microprocesador consta de una unidad de
procesamiento central (CPU) y una unidad de control (CU).
La CPU es el cerebro de un microprocesador y es donde toda la aritmética y las
operaciones lógicas se realizan. La CU, controla las operaciones internas del
microprocesador y envía señales de control a otras partes del
microprocesador para llevar a cabo las instrucciones necesarias.
La memoria es una parte importante de un sistema de microcomputadora. Se puede
clasificar la memoria en dos grupos, la memoria del programa y la memoria de datos.
La memoria de programa almacena todo el código del programa y esta memoria
es por lo general no volátil, es decir, los datos no se pierde después apagar el sistema.
La memoria de datos es donde los datos de usuario se almacenan temporalmente,
durante las varias operaciones aritméticas y lógicas. La memoria de datos suele ser
volátil [3] [4] [12] [13].
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
56
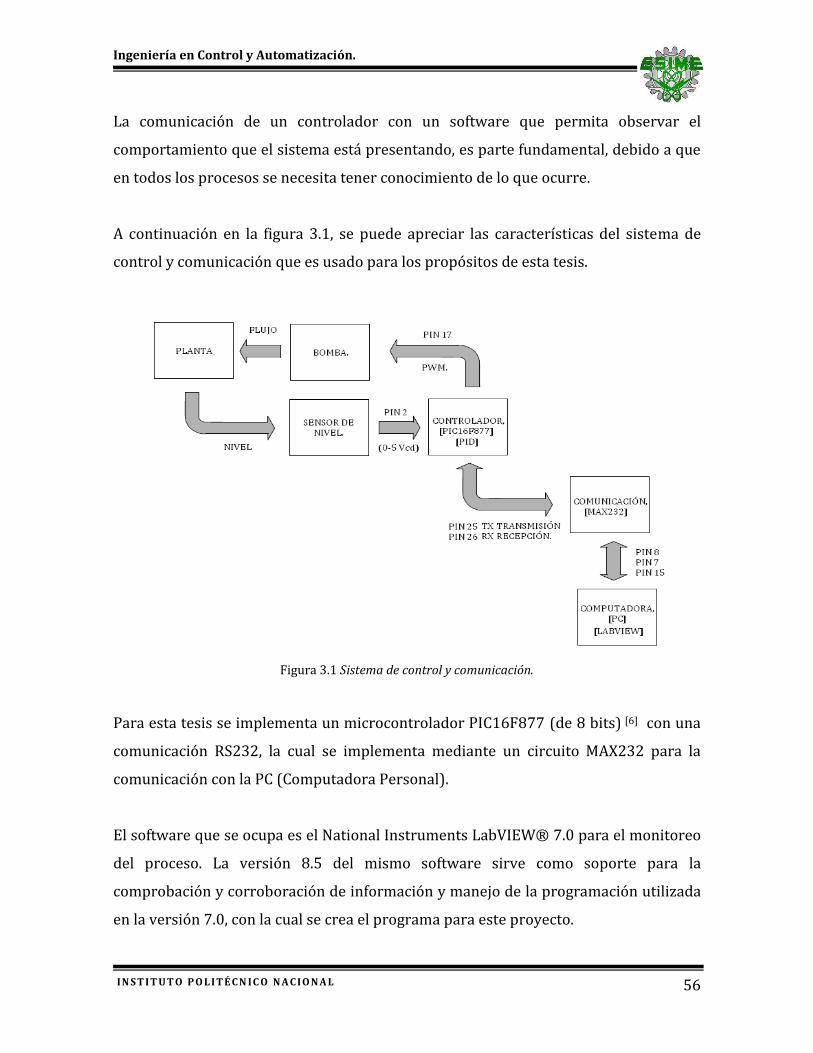
La comunicación de un controlador con un software que permita observar el
comportamiento que el sistema está presentando, es parte fundamental, debido a que
en todos los procesos se necesita tener conocimiento de lo que ocurre.
A continuación en la figura 3.1, se puede apreciar las características del sistema de
control y comunicación que es usado para los propósitos de esta tesis.
Figura 3.1 Sistema de control y comunicación.
Para esta tesis se implementa un microcontrolador PIC16F877 (de 8 bits) [6] con una
comunicación RS232, la cual se implementa mediante un circuito MAX232 para la
comunicación con la PC (Computadora Personal).
El software que se ocupa es el National Instruments LabVIEW® 7.0 para el monitoreo
del proceso. La versión 8.5 del mismo software sirve como soporte para la
comprobación y corroboración de información y manejo de la programación utilizada
en la versión 7.0, con la cual se crea el programa para este proyecto.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
57
3.1 Implementación del PID en un PIC.
El PIC recibe una señal filtrada del sensor de nivel, la cual procesa y
posteriormente lleva a cabo una rutina PID para proporcionar una señal de control en
base a lo que calcule, con el fin de mantener el proceso en condiciones correctas de
operación; para esto se necesita adecuar el PID.
Como primer punto se tiene que cambiar el PID diseñado en el dominio de la
frecuencia [s], a la forma del PID en el dominio de Fourier [z] [2], mediante la ecuación
3.1.
1
1
( ) (1 )1
( ) (1 )D
U z T zkp T
E z Ti z T
..……..…. ..……. (ec3.1)
Ecuación 3.1 PID en el dominio de Fourier.
Este PID contiene un nuevo termino [T], el cual indica la velocidad del algoritmo. El
uso de dispositivos con tecnología digital como el PIC, trabajan con sistemas de conteo
de tiempo por lapsos definidos, es por esta razón que se usa este PID, ya que
proporciona la velocidad a la que se quiere que el controlador este actuando.
En base a los valores calculados del PID en la unidad dos, esta nueva representación
del algoritmo en el dominio de Fourier queda como se muestra en la ecuación 3.2
1
1
( ) 0.1 (1 )0.068 1 3.5
( ) 15.4(1 ) 0.1
U z z
E z z
..……...……. (ec3.2)
Ecuación 3.2 PID calculado en el dominio de Fourier.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
58
Se considera T a 0.1 segundos, ya que se quiere que el sistema este reaccionando de
una manera rápida.
Del PID se obtienen tres ecuaciones que permiten obtener los valores más
importantes en el uso de la programación del PIC. Estos son mostrados en las
ecuaciones 3.3, 3.4 y 3.5.
0.068a kp ……...……................……...… (ec3.3)
Ecuación 3.3 Parámetro proporcional del PID a ser usado en el programa del PIC.
40.068 0.14.4155 10
15.4
kpTb
Ti
…....……...… (ec3.4)
Ecuación 3.4 Parámetro integral del PID a ser usado en el programa del PIC.
0.068 3.52.38
0.1
DkpTc
T
……...…..……...… (ec3.5)
Ecuación 3.5 Parámetro derivativo del PID a ser usado en el programa del PIC.
Con estos tres valores, en conjunto con el algoritmo para la programación del PID en
el PIC y con las respectivas instrucciones de dicho dispositivo se comienza con la
programación.
Como primer punto se presenta el algoritmo para la rutina PID en el microcontrolador
[5], este se muestra a continuación con su respectiva descripción de cada parte de la
rutina, para comprender la secuencia que se lleva a cabo.
Nótese que el programa que se presenta a continuación, solo es la rutina PID, sin la
comunicación del microcontrolador.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
59
BEGIN //Empiezo de la rutina.
DO FOREVER // Ciclo infinito. Get set point: r(kT) //Obtener set point. Get system output: w(kT) //Obtener salida del sistema. Calculate error: e(kT) = r(kT) - w(kT) //Cálculo del error. Calculate I term: p(kT) = be(kT) + p(kT-T) //Cálculo del término integral. Calculate D term: q(kT) = cw(kT) - cw(kT-T) //Cálculo del término derivativo. Calculate PID output: u(kT) = p(kT) + aw(kT) + q(kT) //Cálculo de la salida del PID.
IF u(kT) > MAX //Condicional, para la salida del PID. p(kT) = p(kT-T) + MAX - u(kT) u(kT) - MAX
ELSE IF u(kT) < MIN
p(kT) = p(kT-T) + MIN - u(kT) u(kT) = MIN
END IF //Fin del condicional. Send control to actuator //Señal de control al actuador. Save variables: p(kT-T) = p(kT) //Guardar variables.
w(kT-T) = w(kT)
Wait for next sample //Espera para el próximo muestreo.
END DO //Fin del ciclo infinito.
END //Fin de la rutina.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
60
El programa queda de la siguiente manera.
Los parámetros del PID son:
a = 0.068
b = 44.4155 10
c = 2.38
T = 0.1 segundos
Set point= 5000 mv (milivolts)=5 volts
#include <PI6F877.h>
#include <delays.h>
void main()
float a,b,c,set_point,rkt,LSB,ekt,pkt,qkt,ykt,ukt; //Define variables del programa.
float MAX,MIN,pkt_l,ekt_l; //Define variables del programa.
int control,i; //Define variables del programa.
LSB=5000.0/1024.0;
//5 volts entre la resolución del puerto A/D de 10 bit de longitud.
// 10bits= 1111111111b=1023d lo cual son valores de (0-1023)=1024 valores.
MIN=0.0; //Valor mínimo de la salida del controlador, (0 volts)
MAX=5000.0; //Valor máximo de la salida del controlador, (5 volts)
pkt_l = 0.0; //Inicio en 0 del valor asociado al cálculo del término I; para la serie.
ekt _l=0.0; //Inicio en 0 del valor asociado al error; para la serie.
/* Define PID parameters */ //Define los parámetros del PID, antes calculados.
a=0.068;
b=0.00044155;
c=2.38;
/* Required set-point level in mv (milivolts) */
set_point=5000.0; //Set point de 5 volts.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
61
/* Configure Port C as output for the PWM */
TRISC=0;
//La salida PWM CCP1 se controla mediante temporizador 2 y registros PR2, T2CON,
//CCPR1L y CCP1CON.
//Aquí se configura el Puerto C como PWM, se usa CCP1, del pin 17.
//El puerto C es de 8bits, configurados como salida.
/* Define PWM period and enable PWM mode */
PR2=249; //Periodo del PWM de 1 ms (milisegundos)
//Periodo del PWM=(PR2 + 1)*4*Tosc(Multiplicador de reloj [1- 4])
//El Tosc del microcontrolador es de [0.250 µS (microsegundos) a
………………………………………………..// 4 MHz_cristal (Megahertz)]
// Periodo del PWM= (249+1)'4"0.250"4=1 ms
CCPICON=Ox3C; //Habilita el modo PWM
T2CON=5; //Timer2 con el factor de multiplicación = 4
/* START OF PROPORTIONAL-INTEGRAL-DERIVATIVE LOOP */
while(l) //Ciclo infinito.
/* Configure the A/D */ //Configura el convertidor analógico-digital.
ADCONI=0x80; //6 Bits más significativos a cero.
//Esto se explica al llegar a la conversión A/D.
ADCON0=0x41; //Pone el oscilador para el convertidor analógico-digital.
/* Start A/D conversion */ //Comienza la conversión analógico-digital.
ADCON0=0x45;
while((ADCON0 & 4) != 0); //Espera para la conversión.
/* Read the sensor output */ //Lee la salida del sensor.
ykt=256.0*(float)ADRESH+(float)ADRESL;
ykt=ykt*LSB; //Salida del sensor en mv.
// ADRESH y ADRESL son de 8 bits cada uno y el resultado de sumarlos es de 16 bits.
// El par de registros ADRESH:ADRESL se carga con el resultado de 10 bits de la conversión
//A/D, así que sobran 6 bits.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
62
//ADFM indica la selección del formato de justificación a la izquierda o derecha; ADFM=1, por lo
//que de los 16 bits de la suma, los 6 más significativos (MSB) o bits de la izquierda los toma
//ADRESH y se hacen 0 y los 10 menos significativos los toma ADRESL y son los 10 bits
// admitidos para la conversión (A/D) [7].
rkt=set_point; //Set point.
/* Calculate error */ //Cálculo del error.
ekt=rkt-ykt;
/* Calculate I term */ //Cálculo de la parte integral.
pkt=b*ekt+pkt_l;
/* Calculate D term */ //Cálculo de la parte derivativa.
qkt=c*(ekt-ekt _l);
/* Calculate PID output */ //Cálculo de la salida del PID.
ukt=pkt+a*ekt+qkt;
if(ukt > MAX) //Condicional, para la salida del PID.
pkt=pkt_l; //Evita efecto windup.
ukt=MAX;
else if(ukt < MIN)
pkt=pkt_l; //Evita efecto Windup.
ukt=MIN;
//Fin del condicional.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
63
/* Send control to pump driver */ //Señal del controlador al actuador.
ukt=ukt-5.0; //La resta y división de la señal de control es debido
ukt=ukt/4.0; //al acomodo de bits dentro de la secuencia del
//microcontrolador y no debido a alguna acción de
// la lógica del algoritmo PID.
control=ukt; //Señal de control.
CCPR1L=control; //Envió de la señal de control al PWM.
/* Save variables */ //Guarda variables (acumulado),
pkt_l=pkt; //para el siguiente ciclo.
ekt l=ekt;
/* Wait for 0.1 seconds */ //Espera para el próximo muestreo.
Wait(100); //milisegundos.
//Fin del ciclo infinito.
//Fin del programa.
El manejo de numeración hexadecimal en el leguaje C del programa, es debido al
manejo de los registros del PIC.
En el uso de numeración hexadecimal se indica como primer punto la pertenencia a
esta, mediante (0x), seguido de dos números, los cuales indican un valor binario de
cuatro dígitos para cada uno, dando ocho dígitos en binario, que representan los
pines y las características de cada uno según la función del PIC.
La programación realizada se hace en MPLAB IDE® con ayuda del compilador CC5X
para lenguaje C, posteriormente es pasada al microcontrolador en un archivo [.hex]
mediante el programador de PIC’s WinPic800. De esta forma se tiene la información
del algoritmo PID en el PIC.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
64
Se hace del modo antes mencionado si sólo se requiere control y no monitoreo del
sistema. Nótese que la programación aún no involucra la parte de comunicación, sino
simplemente es la rutina PID necesaria para hacer el control, la parte de comunicación
para monitoreo del sistema se analiza más adelante en esta tesis.
Parte fundamental del análisis del prototipo usado en la tesis, está encaminado a
conocer los parámetros y características de los elementos que lo componen, con la
finalidad de hacer el diseño físico de un controlador que responda a las necesidades
del sistema. El diseño físico del controlador debe tener ciertas características
eléctricas para su correcto funcionamiento y operación.
A continuación en la figura 3.2 se muestra el diseño del circuito eléctrico que se
representa al sistema de control [2], sin comunicación para monitoreo.
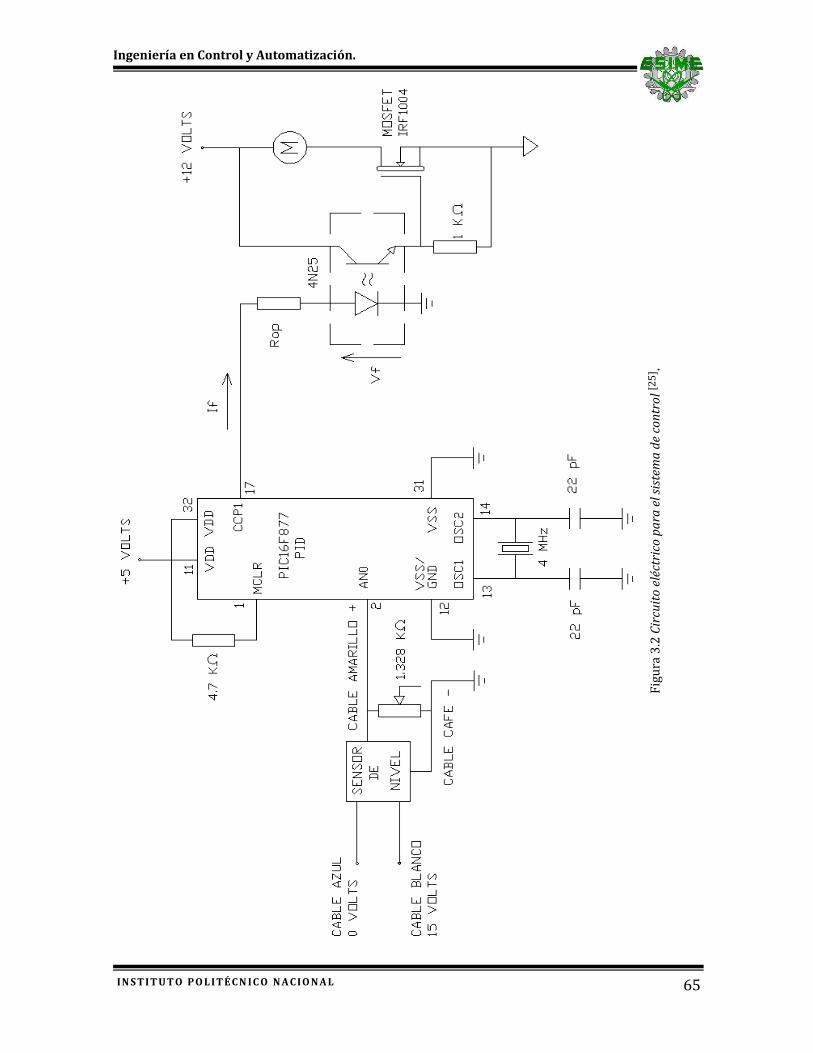
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
65
Fig
ura
3.2
Cir
cuit
o e
léct
rico
pa
ra e
l sis
tem
a d
e co
ntr
ol [2
5] .
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
66
Los valores de los componentes elécticos, tanto capacitores como resistencias, son
propuestos para la configuración citada del PIC, en base a la referencia de la
bibliografía consultada [2], como se muestra en la figura 3.2.
Pero la resistencia [Rop] es calculada debido a la implemtación de optoacoplamiento
propuesto, debido a que el MOSFET se dispara con valores de voltaje, la señal de
entrada a este dede ser igual como si estuviera directamente conectado a la salida de
PIN 17 del PIC. La ecuación 3.6 muestra el planteamiento de la ecuación necesaria
para el cálculo de la resistencia.
17P op F FV R I V ……...……...............…...… (ec3.6)
Ecuación 3.6 Síntesis de la ecuación para el cálculo de la
resistencia necesaria para el optoacoplador.
Se despeja Rop, como se muestra en la ecuación 3.7.
17P Fop
F
V VR
I
……………………………..… (ec3.7)
Ecuación 3.7 Despeje de la resistencia de la ecuación 3.6
Según la hoja de especificaciones del 4N25 [14], se tienen los siguientes datos:
VF= 1.2 Vcd
IF= 1 mA (miliamperes)
Y la ecuación queda de la siguiente manera.
17
3
5 1.23.8
1 10
P Fop
F
V V V VR k
I mA
…………….… (ec3.8)
Ecuación 3.8 Cálculo de la resistencia necesaria para el optoacoplador.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
67
3.2 Comunicación.
El objetivo de hacer la comunicación o envío de datos por parte del
microcontrolador a la PC, es con la finalidad de monitorear el sistema.
Teniendo el programa con la rutina PID listo para la ejecución, se necesita enviar
datos del microcontrolador a la PC. Lo anterior se logra usando el comando USART y
los pines 25 para transmisión de datos [Tx] y 26 para recepción de datos [Rx] del
microcontrolador, los cuales trabajan en conjunto con un circuito MAX232 para la
comunicación serie [8]. La comunicación serie RS-232 significa Recommend Standard
232, está definido por el ANSI (American National Standard Institution) como la
interfase entre un equipo terminal de datos y un equipo de comunicación de datos
utilizando un intercambio binario en modo serie.
Usart en una librería indispensable para la comunicación del PIC y se describe a
continuación.
El receptor-transmisor síncrono-asíncrono universal (USART) es una biblioteca que
contiene una serie de funciones para transmitir y recibir datos del serial [3].
El microcontrolador puede realizar otras operaciones mientras que los datos se
envían a la USART.
El hardware de la biblioteca USART proporciona las siguientes funciones:
Usart_Init
Usart_Data_Ready
Usart_Read
Usart_Write

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
68
La función de Usart_Init inicializa el hardware USART con la velocidad de transmisión
especificada. Esta función debe ser llamada en primer lugar, antes de cualquier otra
función USART. El único parámetro requerido por esta función es la velocidad de
transmisión.
La función Usart_Data_Ready se puede llamar para comprobar si un byte de datos ha
sido recibido o no por el USART. La función devuelve un 1 si los datos han sido
recibidos y un 0 si no se han recibido datos.
La función de Usart_Read es llamada a leer un byte de datos de la USART. Si los datos
no han sido recibidos, se devuelve un 0. La función debe ser llamada después de
llamar a la función Usart_Data_Ready para asegurarse de que los datos
están disponibles en el USART.
La función de Usart_Write envía un byte de datos a la USART y así una serie de datos
se envía fuera de la USART.
Con los parámetros de comunicación definidos, se hace el programa completo de la
rutina PID con la comunicación, quedando como se muestra a continuación en la tabla
4.1
Los parámetros del PID son:
a = 0.068
b = 44.4155 10
c = 2.38
T = 0.1 segundos
Set point= 5000 mv (5 volts)

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
69
Tabla 3.1. Rutina PID y envio de datos para la comunicación.
#include <p16f877.h> #include <delays.h> void main()
float a,b,c,set_point,rkt,LSB,ekt,pkt,qkt,ykt,ukt; float MAX,MIN,pkt_l,ekt_l; int control,i; LSB=5000.0/1024.0; MIN=0.0; MAX=5000.0; pkt_l = 0.0 ; ekt _l=0.0 ;
unsigned char Nivel; //Variable a enviar.
//*Ajuste de velocidad de transmisión *// Usart_Init(9600); /* Define PID parameters */ a=0.068; b=0.00044155; c=2.38; /* Required set-point level (mv) */ set_point=5000.0; /* Configure Port C as output for the PWM */ TRISC=0; /* Define PWM period and enable PWM mode */ PR2=249; CCPICON=Ox3C; T2CON=5; /* START OF PROPORTIONAL-INTEGRAL-DERIVATIVE LOOP- ,/ while(l)
//*Espera por byte de datos *// while(!Usart_Data_Ready()); /* Configure the A/D */ ADCONI=0x80; ADCON0=0x41; /* Start A/D conversion */ ADCON0=0x45; while((ADCON0 & 4) != 0); /* Read the sensor output */ ykt=256.0*(float)ADRESH+(float)ADRESL; ykt=ykt*LSB;

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
70
//*Lee byte de datos *// ykt=Nivel; //*Variable de envío*// Nivel=Usart_Read(); //*Envía byte *// Usart_Write(Nivel); rkt=set_point; /* Calculate error */ ekt=rkt-ykt; /* Calculate I term */ pkt=b*ekt+pkt_l; /* Calculate D term */ qkt=c*(ekt-ekt _l); /* Calculate PID output */ ukt=pkt+a*ekt+qkt; if(ukt > MAX)
pkt=pkt_l; ukt=MAX; else if(ukt < MIN)
pkt=pkt_l; ukt=MIN; /* Send control to pump driver */ ukt=ukt-5.0; ukt=ukt/4.0; control=ukt; CCPR1L=control; /* Save variables */ pkt_l=pkt; ekt l=ekt; /* Wait for 0.1 seconds */ Wait(100);

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
71
Con los comandos de comunicación definidos y puestos en el programa del algoritmo
PID, se construye el circuito para la comunicación, como se muestra en la figura3.3.
El cable necesario para la comunicación entre el MAX232 y la PC es un cable DB9.
Nótese por igual que los valores de los componentes elécticos, tanto capacitores como
resistencias, son propuestos para la configuración citada del PIC y del MAX232, en
base a la referencia de la bibliografía consultada [1] [3], como se muestra en la figura 3.3
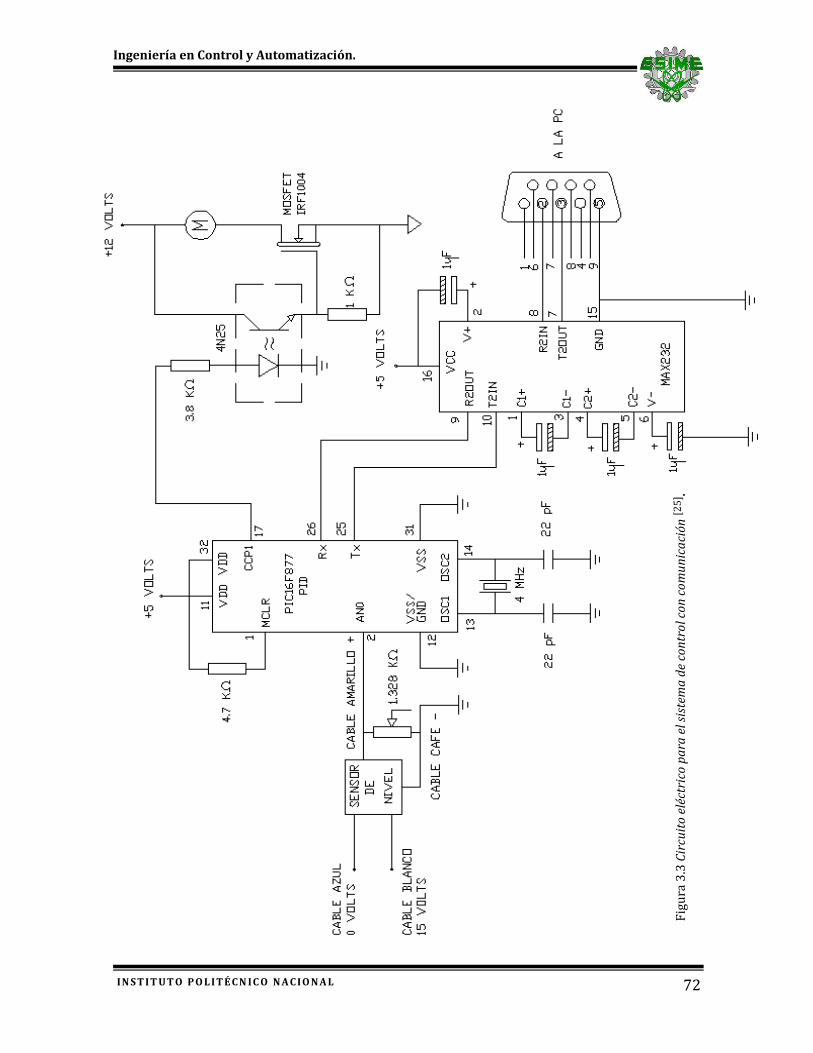
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
72
Fig
ura
3.3
Cir
cuit
o e
léct
rico
pa
ra e
l sis
tem
a d
e co
ntr
ol c
on
co
mu
nic
aci
ón
[25
] .
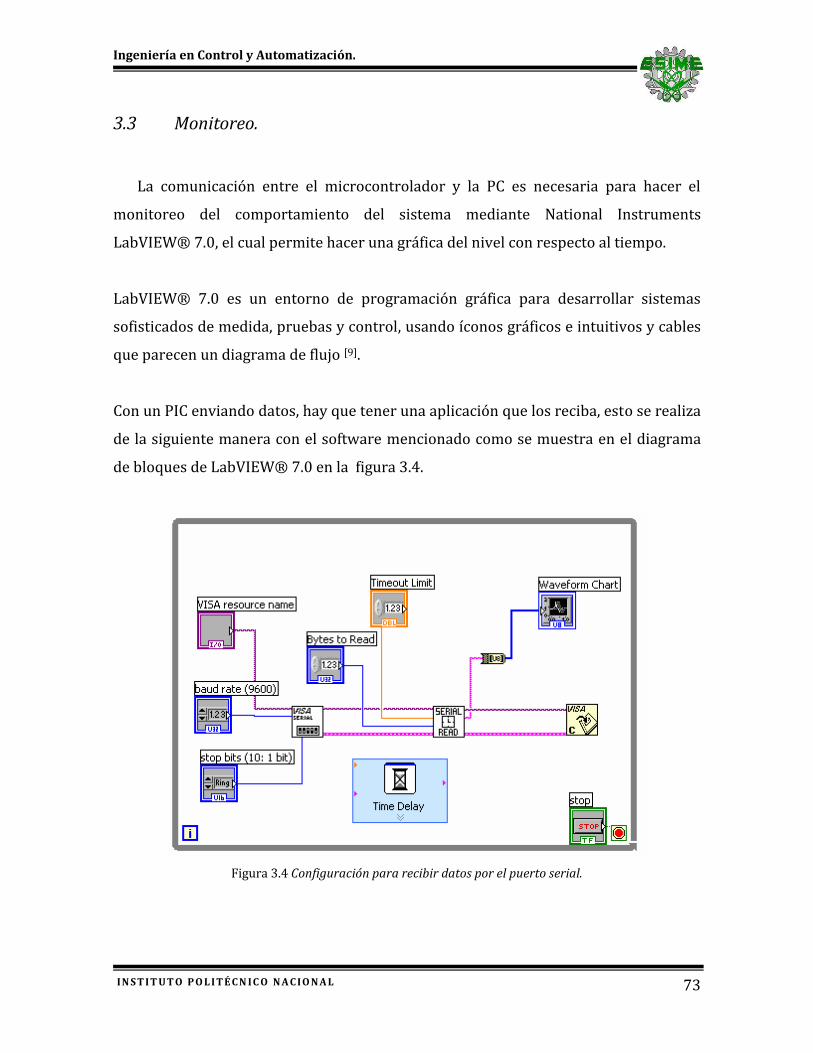
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
73
3.3 Monitoreo.
La comunicación entre el microcontrolador y la PC es necesaria para hacer el
monitoreo del comportamiento del sistema mediante National Instruments
LabVIEW® 7.0, el cual permite hacer una gráfica del nivel con respecto al tiempo.
LabVIEW® 7.0 es un entorno de programación gráfica para desarrollar sistemas
sofisticados de medida, pruebas y control, usando íconos gráficos e intuitivos y cables
que parecen un diagrama de flujo [9].
Con un PIC enviando datos, hay que tener una aplicación que los reciba, esto se realiza
de la siguiente manera con el software mencionado como se muestra en el diagrama
de bloques de LabVIEW® 7.0 en la figura 3.4.
Figura 3.4 Configuración para recibir datos por el puerto serial.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
74
Del diagrama de bloques se tiene lo siguiente [22] [15]:
[VISA serial] = Configura el puerto serie.
[VISA resource name, control] = Especifica los recursos que se abrirán, (puerto COM)
[Baud rate] = Velocidad de transmisión.
[Stop bits] = Especifica el número de bits de parada.
[Bytes to read] = Bytes leídos.
[Time limit] = Establece el valor de tiempo de espera para la escritura y lectura.
[Serial read] = Lee el puerto.
[Visa C] = Cierra una sesión VISA.
[String to byte array] = Convierte una cadena en una matriz de bytes.
[Waveform chart] = Gráfica de salida. Muestra la respuesta del sistema de 0 Vdc a 5
Vcd, o al ser programada con la ecuación 1.4 muestra la respuesta del sistema en
centímetros; para conocimiento del control de nivel en el tanque de proceso.
[Time delay] = Tiempo de espera, para que el controlador calcule.
[Stop] = Paro de la simulación.
La pantalla del panel frontal de LabView® 7.0 queda como se muestra en la figura 3.5
y es la aplicación que el usuario puede observar, si desea ver el nivel de acuerdo a la
señal de salida del sensor (en volts).
Figura 3.5 Apariencia del sistema de monitoreo.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
75
La siguiente figura muestra la gráfica que debe presentar el sistema cuando se le
asigne un set point predeterminado y se programe en waveform chart la ecuación 1.4.
La simulación muestra en sus tres gráficas un set point de 3.2 centímetros, 6.5
centímetros y 9.7 centímetros escogidos aleatoriamente como prueba.
Figura 3.6 Simulación a diferentes valores de set point.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
76
Como otro punto a considerar, la siguiente figura muestra la respuesta esperada al
hacer un cambio de set point.
Figura 3.7 Cambio de set point.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
77
Capítulo 4 [Análisis económico y mantenimiento]
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
78
Capítulo 4
La idea de analizar es simplemente ver si lo que se ha realizado cumple con las
expectativas planteadas y con los requerimientos propuestos al inicio del proyecto.
El analizar propone un panorama donde se visualizan los resultados, no simplemente
desde el punto de vista de ingeniería y desarrollo tecnológico, sino desde otros puntos
de vista, donde intervienen los aspectos económicos y los recursos necesarios para
mantener la integridad y capacidad de nuestro proyecto en buenas condiciones de
operación.
El análisis de resultados tecnológicos es planteado en el capítulo dos y capítulo tres,
donde paso a paso se desarrolla el diseño de ingeniería de un sistema de control para
el llenado del tanque de proceso del RT-210 Process Control RIG y donde se menciona
que la implementación del algoritmo de control PID al sistema de llenado es
satisfactoria, debido a que las pruebas hechas en la simulación resuelven de manera
correcta los problemas ocasionados al presentarse una perturbación en el sistema y
que de igual forma la implementación de la rutina PID en el PIC (con su
comunicación), se considera una forma práctica e interactiva de resolver el problema
de control y monitoreo del sistema de llenado.
Pero otros resultados son los económicos, los cuales al hacer su análisis se puede
interpretar la viabilidad en cuanto a costo-beneficio, de haber hecho o implementado
alguna solución efectiva.
Dicho lo anterior se comienza haciendo el análisis económico; para así concluir con los
requerimientos necesarios para mantener en una correcta operación al sistema
diseñado.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
79
4.1 Análisis económico del proyecto.
Al realizar un proyecto es necesario estimar los costos del mismo, para saber el
gasto económico involucrado al fabricar lo planteado en el proyecto.
La estimación de costos de un proyecto involucra varios aspectos, como lo son
desarrollo de ingeniería y mano de obra, materiales y costos por imprevistos.
Los costos que se representan en las siguientes tablas son un estimado de los
diferentes conceptos ya mencionados.
Bajo el concepto de desarrollo de ingeniería, se contempla el estimado de días de
investigación requeridos para la interpretación del problema y la solución del mismo.
Lo antes mencionado lleva a realizar un análisis de fechas de trabajo, considerando
como inicio del proyecto, los ocho meses previos a la entrega de esta tesis.
Basándose en la premisa de ocho meses de trabajo, considerando los días hábiles para
el análisis del proyecto, análisis de prototipo, pruebas en planta, recopilación de
información, investigación y solución, se tienen treinta y dos semanas contempladas
en el plan de trabajo previsto al inicio del proyecto, con un total de ciento sesenta
días, contando en estos mismos la elaboración del material escrito, que para el caso se
presenta como tesis.
Las treinta y dos semanas fueron previstas como un plan de trabajo integral que
denota la evolución del proyecto desde la ingeniería básica, hasta la ingeniería de
detalle, tal como se plantea a lo largo del desarrollo de la tesis.
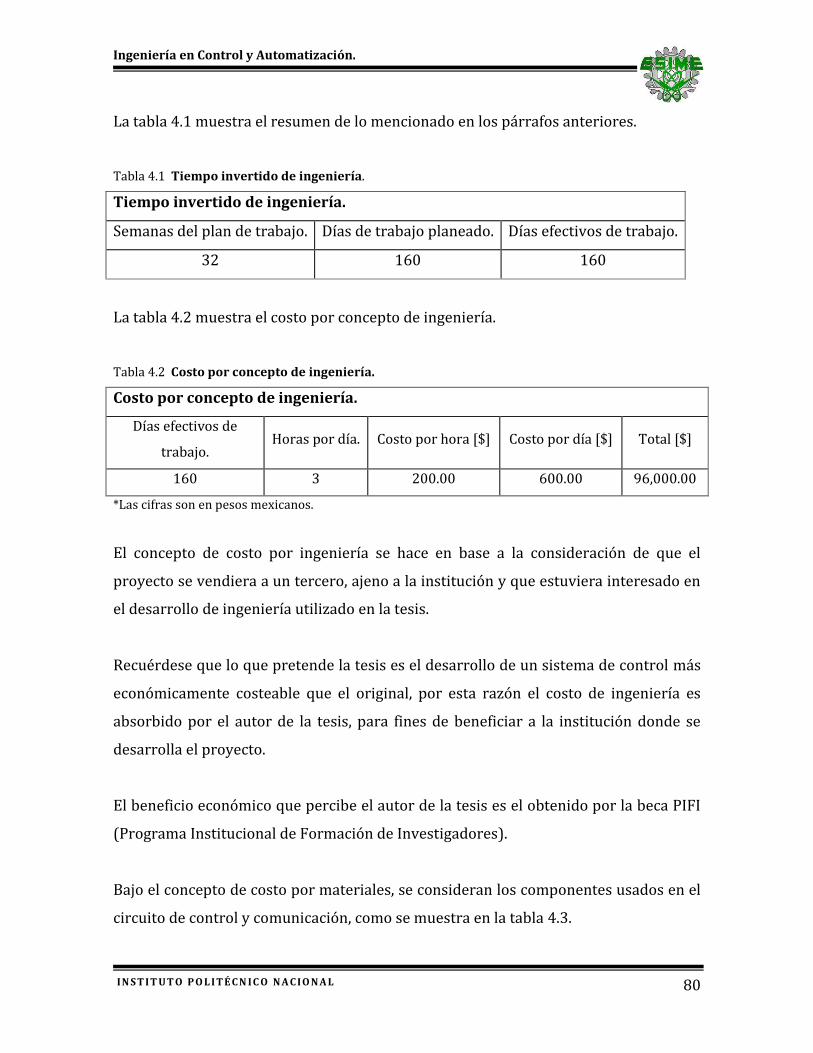
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
80
La tabla 4.1 muestra el resumen de lo mencionado en los párrafos anteriores.
Tabla 4.1 Tiempo invertido de ingeniería.
Tiempo invertido de ingeniería.
Semanas del plan de trabajo. Días de trabajo planeado. Días efectivos de trabajo.
32 160 160
La tabla 4.2 muestra el costo por concepto de ingeniería.
Tabla 4.2 Costo por concepto de ingeniería.
Costo por concepto de ingeniería.
Días efectivos de
trabajo. Horas por día. Costo por hora [$] Costo por día [$] Total [$]
160 3 200.00 600.00 96,000.00
*Las cifras son en pesos mexicanos.
El concepto de costo por ingeniería se hace en base a la consideración de que el
proyecto se vendiera a un tercero, ajeno a la institución y que estuviera interesado en
el desarrollo de ingeniería utilizado en la tesis.
Recuérdese que lo que pretende la tesis es el desarrollo de un sistema de control más
económicamente costeable que el original, por esta razón el costo de ingeniería es
absorbido por el autor de la tesis, para fines de beneficiar a la institución donde se
desarrolla el proyecto.
El beneficio económico que percibe el autor de la tesis es el obtenido por la beca PIFI
(Programa Institucional de Formación de Investigadores).
Bajo el concepto de costo por materiales, se consideran los componentes usados en el
circuito de control y comunicación, como se muestra en la tabla 4.3.
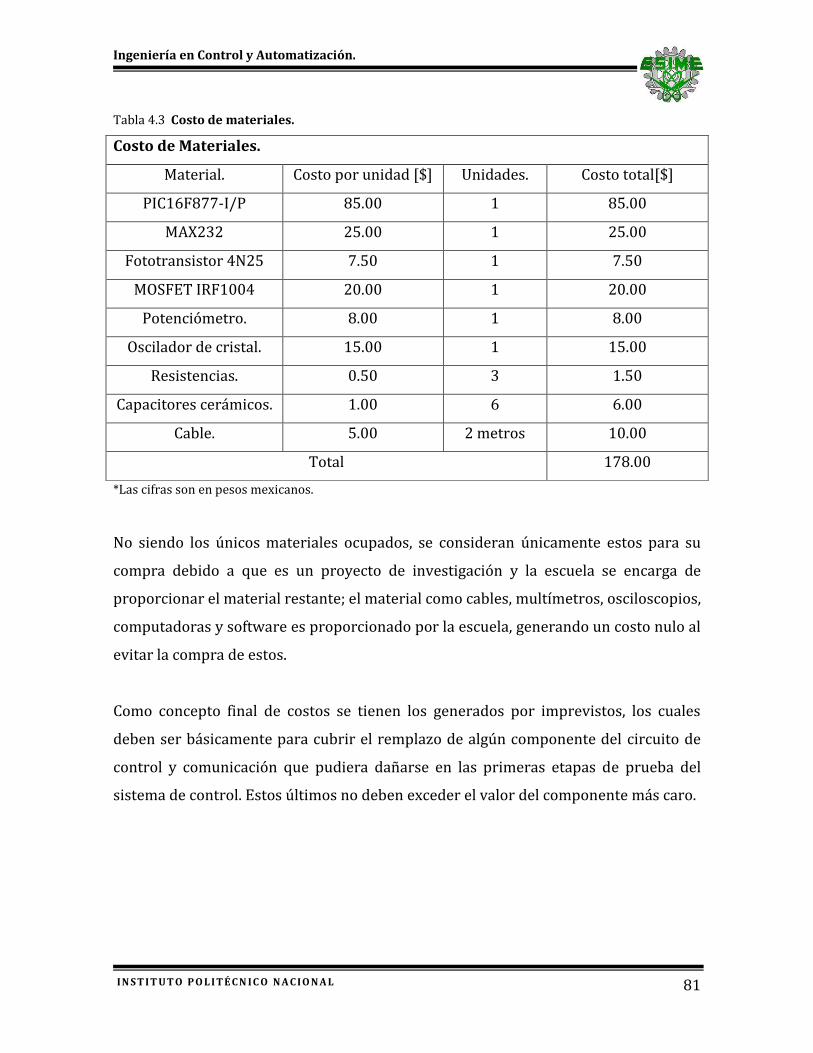
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
81
Tabla 4.3 Costo de materiales.
Costo de Materiales.
Material. Costo por unidad [$] Unidades. Costo total[$]
PIC16F877-I/P 85.00 1 85.00
MAX232 25.00 1 25.00
Fototransistor 4N25 7.50 1 7.50
MOSFET IRF1004 20.00 1 20.00
Potenciómetro. 8.00 1 8.00
Oscilador de cristal. 15.00 1 15.00
Resistencias. 0.50 3 1.50
Capacitores cerámicos. 1.00 6 6.00
Cable. 5.00 2 metros 10.00
Total 178.00
*Las cifras son en pesos mexicanos.
No siendo los únicos materiales ocupados, se consideran únicamente estos para su
compra debido a que es un proyecto de investigación y la escuela se encarga de
proporcionar el material restante; el material como cables, multímetros, osciloscopios,
computadoras y software es proporcionado por la escuela, generando un costo nulo al
evitar la compra de estos.
Como concepto final de costos se tienen los generados por imprevistos, los cuales
deben ser básicamente para cubrir el remplazo de algún componente del circuito de
control y comunicación que pudiera dañarse en las primeras etapas de prueba del
sistema de control. Estos últimos no deben exceder el valor del componente más caro.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
82
4.2 Mantenimiento.
Haciendo un inventario de los componentes del RT-210 Process Control RIG, se
tiene la tabla 1.1, donde se mencionan las partes que ensamblan el prototipo
mencionado. De esta tabla se desprende la tabla 4.4, donde se hallan las partes vitales
más propensas a fallas o a deterioro.
Tabla 4.4 Partes del RT-210 Process Control RIG propensas a fallas.
Tanque de proceso. Sensor de nivel [capacitivo]. Sensor de temperatura de resistencia de platino. Sensor de caudal. Enfriador con ventilador. Válvula de control/válvula de drenado. Bomba. Tanque de abastecimiento. Agitador. Válvulas de drenado manual. Solenoide desviador. Desviador manual. Válvula de purgado. Válvula de compuerta. Calentador. Sensor de temperatura de flujo, tipo prt. Sensor de temperatura del tanque, tipo prt. Selector de temperatura. Tubería.
La mayoría de los componentes indicados en la tabla son válvulas, componentes
electrónicos y eléctricos, los cuales pueden verse afectados de manera irreversible a
causa del mal uso, debido a la falta de precaución al ponerlos en operación bajo
condiciones ajenas a las especificaciones del equipo y de sus respectivas hojas de
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
83
datos. También puede haber disminución de la capacidad operativa en tuberías y
tanques debido al sarro formado por no usar agua destilada.
El uso del prototipo RT-210 Process Control RIG se hace en los laboratorios de la
carrera de Ingeniería en Control y Automatización por parte de alumnos y profesores,
los cuales generalmente hacen prácticas en cuestión a la realización de DTI’s
(Diagramas de tubería e instrumentación), sin poner en operación al equipo. Otras
personas que hacen uso del equipo son alumnos investigadores, los cuales ponen en
operación al equipo para diversos fines.
De lo mencionado anteriormente se sabe que a pesar de no poner al equipo a operar
en condiciones extremas y con demasiada frecuencia a pruebas que lo deterioren, el
equipo sufre desgaste y requiere de un plan de mantenimiento y de un procedimiento
de seguridad para su uso.
El mantenimiento considerado para el equipo es preventivo, dado que es una
actividad programada para prevenir averías en el sistema. Considerando como se usa
el equipo y cada cuando se usa, se programa un plan de mantenimiento semestral,
tomando los periodos vacacionales para realizarlo y no interferir con su posible o
eventual uso para alguna práctica.
Dicho plan de mantenimiento se debe hacer principalmente sobre los componentes
mostrados en la tabla 4.4, revisando en primera estancia y en base al manual de
operación [1], las señales de los componentes electrónicos como son los sensores, con
la finalidad de corroborar que generen las señales adecuadas, también hay que hacer
pruebas a los componentes eléctricos que tienen la función de elementos finales de
control como lo son solenoides, ventilador, agitador, calentador y bomba, para
corroborar que operen de forma correcta, al igual se tiene que comprobar que las
válvulas manuales operen y no tengan obstrucciones y que la tubería y el tanque de
proceso junto con el tanque contenedor, no tengan sarro.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
84
En caso de encontrar alguna falla que no pueda ser corregida, o que un dispositivo
este dañado de forma irreversible, se puede tratar de diseñar el elemento dañado o
buscar un similar para su reemplazo según las características del elemento original;
de no poderse hacer de esa forma, se tiene que hacer contacto con Bytronic para hacer
el pedido de la pieza dañada. Si se hace el mantenimiento adecuado y se evita darle
mal trato al equipo, este tendrá una vida útil más eficiente.
Con respecto al procedimiento de seguridad para su uso, se plantean los siguientes
puntos considerados como los más significativos para no dañar el equipo y la
integridad del operario.
Verificar las condiciones del equipo.
Conocer en su totalidad la operación del prototipo.
Verificar las características eléctricas de los elementos del prototipo.
Conectar de forma correcta los componentes del prototipo.
Asegurar de forma correcta las conexiones para evitar falsos contactos.
De ser posible verificar cada parte del prototipo antes de usarlo.
Usar agua destilada.
No encender si no hay agua.
Purgar la bomba antes de usarla.
Verificar que no haya fugas de agua.
Evitar introducir objetos y manos en los tanques del prototipo.
Usar el prototipo en una superficie amplia.
Mantener el sistema de control aislado del prototipo.
En caso de falla en la operación del prototipo, desenergizar.
Evitar tocar los tanques cuando operan con agua caliente y tener cuidado al
drenarla.
Permitir que disminuya la temperatura del equipo antes de guardarlo.
Basarse en las condiciones de operación de equipo.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
85
Conclusiones

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
86
Conclusión de la tesis
El presente trabajo de tesis que se ha derivado del proyecto de investigación
con clave de la SIP 20090181 ha cumplido con los lineamientos planteados en el
objetivo, mostrando al lector el desarrollo de ingeniería básica y de detalle en cuanto a
la implementación de un algoritmo que permite hacer el control de nivel en el tanque
de proceso del sistema RT-210 Process Control RIG y poderlo monitorear.
La forma en la que se implementa el algoritmo y la manera en que se hace el
monitoreo para el sistema mencionado, permite al alumno de la carrera de Ingeniería
en Control y Automatización un acercamiento general con el prototipo, tal que puede
interactuar de manera completa y profunda con la operación de dicho sistema,
haciendo ver todo el trabajo inmerso que está detrás del desarrollo de un sistema de
control real.
Lo mencionado anteriormente es con la finalidad de hacer saber al estudiante de la
carrera de Ingeniería en Control y Automatización todas las consideraciones y
conocimiento necesario para implementar un sistema de control a un proceso real.
Los procesos demandan muchas consideraciones y no necesariamente la primera
solución escogida es la indicada, sino que se tiene que buscar y seguir buscando de
manera muy profunda lo que realmente cumpla y satisfaga lo que se pretende. Esto es
muy importante ya que no siempre se tiene un panorama tan amplio y muchas de las
cosas a las que se les ve una solución sencilla, no lo son así; sino que se tiene que
profundizar y relacionar mediante el conocimiento y la lógica lo que en realidad se
está buscando. Se pueden dar muchas vueltas al asunto hasta encontrar una solución
irrefutable, pero la satisfacción de haberla encontrado resulta completamente
satisfactoria, ya que por meritos propios y por trabajo arduo se logra alcanzar.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
87
Las consideraciones son muchas, comenzando en primer lugar por cómo analizar el
proceso la primera vez que se ve y cómo hacer lo necesario para identificar sus
componentes y funciones, tal que indique al ingeniero que le hará el control, que
partes están en condiciones de operación y por qué razón lo están o no, en caso de
encontrar alguna falla, así también analizar por qué su diseño de control original ya no
es funcional o por qué razón ya no es viable tenerlo.
La segunda consideración y de igual importancia que la primera, es ir directamente a
la parte del proceso donde se trabaja el lazo de control que es de importancia para los
fines que el proyecto requiere y analizar a profundidad cada parte, tanto su estado
como su operación y señales que de este podamos obtener.
Dentro de esta consideración esta el saber de electrónica e instrumentación, ya que
los diferentes tipos de sensores y actuadores trabajan de diferentes formas y se tiene
que saber cuál es la indicada, para así tomar la mejor decisión en cuanto a su
operación y al acoplamiento de señales que estos dispositivos generan o reciben y
poder así tener un sistema que no genere errores por alguna falla ocasionada por
descuido al analizar el equipo. El acoplamiento de la señal para el sensor capacitivo es
sencillo, pero en su momento no fue tan fácil tomar la decisión de usar el elemento
resistivo considerado para el acoplamiento de dicha señal; se hicieron muchas
pruebas en planta y se descartaron un sin fin de filtros que no cumplían con las
expectativas esperadas, al final un elemento tan sencillo fue la solución del problema.
La tercera consideración se toma a partir de la necesidad de saber cómo opera el
algoritmo PID en un proceso real, debido a que en el transcurso de la carrera se ha
comprobado de manera matemática la operación del mismo, pero no ha sido así de
manera práctica en su totalidad. Esta decisión en la selección del algoritmo se da de
manera de prueba y no en base a un fundamento que lo establezca como el idóneo
para el control de nivel.
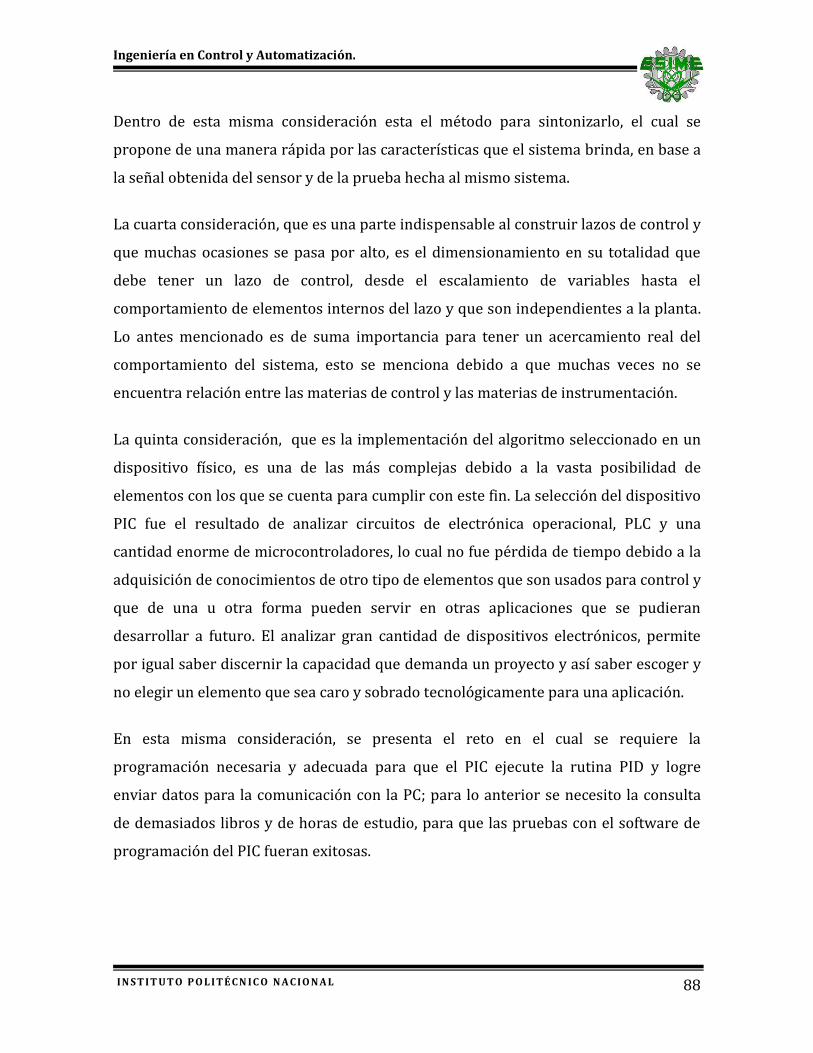
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
88
Dentro de esta misma consideración esta el método para sintonizarlo, el cual se
propone de una manera rápida por las características que el sistema brinda, en base a
la señal obtenida del sensor y de la prueba hecha al mismo sistema.
La cuarta consideración, que es una parte indispensable al construir lazos de control y
que muchas ocasiones se pasa por alto, es el dimensionamiento en su totalidad que
debe tener un lazo de control, desde el escalamiento de variables hasta el
comportamiento de elementos internos del lazo y que son independientes a la planta.
Lo antes mencionado es de suma importancia para tener un acercamiento real del
comportamiento del sistema, esto se menciona debido a que muchas veces no se
encuentra relación entre las materias de control y las materias de instrumentación.
La quinta consideración, que es la implementación del algoritmo seleccionado en un
dispositivo físico, es una de las más complejas debido a la vasta posibilidad de
elementos con los que se cuenta para cumplir con este fin. La selección del dispositivo
PIC fue el resultado de analizar circuitos de electrónica operacional, PLC y una
cantidad enorme de microcontroladores, lo cual no fue pérdida de tiempo debido a la
adquisición de conocimientos de otro tipo de elementos que son usados para control y
que de una u otra forma pueden servir en otras aplicaciones que se pudieran
desarrollar a futuro. El analizar gran cantidad de dispositivos electrónicos, permite
por igual saber discernir la capacidad que demanda un proyecto y así saber escoger y
no elegir un elemento que sea caro y sobrado tecnológicamente para una aplicación.
En esta misma consideración, se presenta el reto en el cual se requiere la
programación necesaria y adecuada para que el PIC ejecute la rutina PID y logre
enviar datos para la comunicación con la PC; para lo anterior se necesito la consulta
de demasiados libros y de horas de estudio, para que las pruebas con el software de
programación del PIC fueran exitosas.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
89
Como sexta consideración esta el programa de monitoreo, necesario para recibir datos
en la PC; la primera idea era el uso de Visual Basic, en el cual se logró el avance del
programa para recibir datos, pero enseguida se puso una mejor propuesta al usar
LabVIEW, con el cual se concluyó y que para su implementación fue necesario hacer
pruebas en diferentes versiones del mismo. De este programa se puede aprender de
manera práctica y fácil como interactuar con sistemas que están en operación.
Para finalizar están los costos, parte importante y fundamental en un proyecto, ya que
de esto depende en muchos casos que este se lleve a cabo o no. El uso del PIC, es el
más conveniente por su precio y por su beneficio, ya que lleva a cabo la tarea
encomendada de una manera funcional, práctica y viable.
El proceso de desarrollo de la tesis es una experiencia que involucra la búsqueda de
conocimiento y por ende el descubrimiento de nuevas cosas que un principio nunca se
habían pensado. Sirve para crear en la persona que desarrolla la tesis nuevos métodos
y formas de autoaprendizaje.
El desarrollo del proyecto referente a esta tesis es una forma muy clara de demostrar
la calidad de educación que la carrera de Ingeniería en Control y Automatización
brinda a los alumnos que la cursan; y con esta tesis queda un instrumento de ayuda al
alumno de la especialidad que desee conocer más acerca de la implementación de
sistemas de control a diversos procesos del tipo industrial.
Cabe resaltar que la Ingeniería en Control y Automatización siendo parte de la Escuela
Superior de Ingeniería Mecánica y Eléctrica, la cual forma parte de una institución de
gran renombre como lo es Instituto Politécnico Nacional, le brinda por igual la misma
oportunidad de crecimiento a cualquier alumno que tenga la perseverancia de salir
adelante.
Y simplemente me queda agradecer una vez más a Dios, a mi familia y a mi escuela;
por haberme hecho quien soy.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
90
Referencias Bibliográficas
[1] Bytronic. Documentation for the Bytronic Process Control Unit (IBM Version), West Midlands USA.
[2] Dogan Ibrahim. Microcontroller Based Temperature Monitoring and
Control, 1a ed, editorial Newnes and Elsevier Science & Technology Books, United Kingdom, September 2002.
[3] Dogan Ibrahim. Advanced PIC Microcontroller Projects in C, 1a ed, editorial Newnes and Elsevier, USA, 2008.
[4] Tim Wilmshurst. Designing Embedded Systems with PIC Microcontrollers, Principles and applications, 1a ed, editorial Newnes and Elsevier, United Kingdom, 2007.
[5] Chris Valenti. Implementing a PID Controller Using a PIC18 MCU, Microchip Technology Inc, 2004.
[6] Microchip Technology Inc. PIC16F87X Data Sheet 28/40-Pin 8-Bit CMOS
FLASH Microcontrollers, U.S.A.
[7] Escuela Politécnica Superior de Alcoy (EPSA) de la Universidad Politécnica de Valencia (UPV). CONVERSOR ANALÓGICO DIGITAL DEL PIC16F877, España, Marzo 2005.
[8] Texas Instruments Incorporated. MAX232, MAX232IDUAL EIA-232 DRIVERS
/RECEIVERS, USA. [9] Programa de Ingeniería en Automática Industrial. COMUNICACIÓN A TRAVÉS
DE PUERTO SERIAL CON LABVIEW, Facultad de Ingeniería Electrónica y Telecomunicaciones, Universidad del Cauca, Colombia.
[10] Katsuhiko Ogata. Modern Control Engineering, 3a ed, editorial Prentice Hall,
USA, 1997. [11] Laurent RICO. Control Process Rig. Hogeschool Zeeland, Netherlands, June
2007. [12] Nigel Gardner. PICmicro MCU C, an Introduction to programming the
Microchip PIC in CCS C, 2a ed, editorial Bluebird Technical, August 2002.
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
91
[13] José María Angulo Usategui/Ignacio Angulo Martínez.
MICROCONTROLADORES PIC. Diseño práctico de aplicaciones. Primera parte. El PIC16F84, Lenguajes PBASIC y Ensamblador. 3a ed, Mc Graw Hill, Madrid España.
[14] Fairchild Semiconductor. GENERAL PURPOSE 6-PIN PHOTOTRANSISTOR
OPTOCOUPLERS, 4N25. [15] José Rafael Lajara / José Pelegrí, LABVIEW: ENTORNO GRAFICO DE
PROGRAMACION, 1a ed, editorial MARCOMBO, S.A., 2007.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
92
Software utilizado
[16] Bytronic, PCUSIM Demo, Process Control Simulation ® [17] The MathWorks TM, MATLAB 7.0 ® [18] The MathWorks TM, MATLAB&Simulink ® [19] Microchip, MPLAB IDE (Integrated Development Environment) v7.43 ® [20] Sisco Benach Font, WinPic800_3.55g ® [21] B Knudsen Data, Norway, CC5X C Compiler ® [22] National Instruments, LabVIEW 8.5 ® [23] National Instruments, LabVIEW 7.0 ® [24] Design Science (DSI), MathType 5 ® [25] Autodesk, AutoCAD 2004 ®
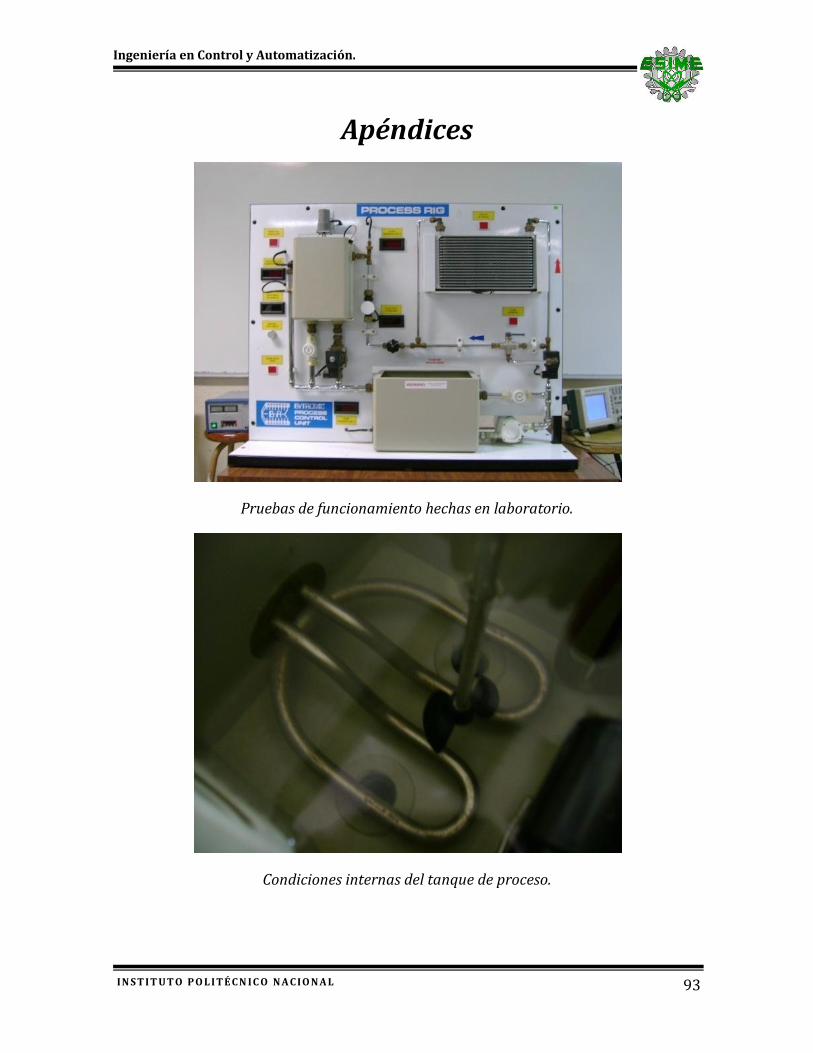
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
93
Apéndices
Pruebas de funcionamiento hechas en laboratorio.
Condiciones internas del tanque de proceso.

Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
94
Sensor de nivel.
Bomba.
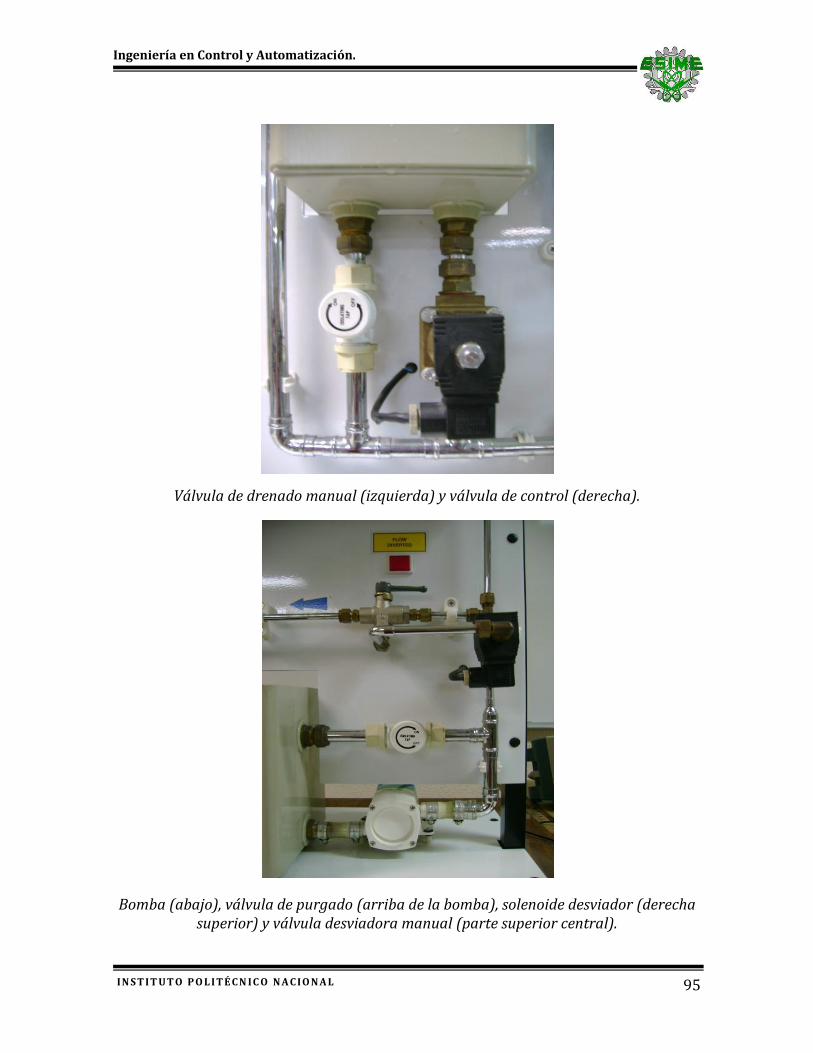
Ingeniería en Control y Automatización.
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
95
Válvula de drenado manual (izquierda) y válvula de control (derecha).
Bomba (abajo), válvula de purgado (arriba de la bomba), solenoide desviador (derecha superior) y válvula desviadora manual (parte superior central).