information driven path planning and control for
TRANSCRIPT

Mechanical Engineering and Materials ScienceDuke University
Information Driven Path Planning and Control for Collaborative Aerial Robotic Sensor Using Artificial Potential Functions
W. Lu and S. Ferrari
1
A.C. Bellini and R.NaldiComputer Science and EngineeringUniverisity of Bologna, ItalyAmerican Control ConferencePortland (OR), June 3-6, 2014

Outline
• Introduction and Motivation
• Problem Formulation : Aerial Robotic Sensor Path Planning
• Methodology: Hybrid Controller• Measurement Utility, Information Value• Information Potential Field Method• High Level and Low Level Controller
• Results• Signal Sensor • Multiple Sensors
• Conclusion and Recommendations

Introduction and Motivation
• Modern Sensor Systems – multiple sensors installed on mobile platforms
- landmine detection and identification
- ambient intelligence, monitoring of urban environments, search & rescue
• Traditional paradigm: sensor information is used as feedback to sensors in order to support the sensor navigation.
• New paradigm: sensors’ motion is planned considering the expected utility of future measurement process, to support one or more sensing objectives
• Research Emphasis: Geometric aerial robotic sensor path planning
-- Address couplings between sensor measurements and sensor dynamics
-- Optimize sensing objectives (e.g., detection, classification, tracking.)

Motivation: Applications of Sensor Path Planning
• Applications: landmine detection, sensor networks for monitoring endangered species
C. Cai and S. Ferrari, “Information-Driven Sensor Path Planning by Approximate Cell Decomposition,” IEEE Transactions on Systems, Man, and Cybernetics - Part B, Vol. 39, No. 2, 2009.
M. Qian and S. Ferrari, “Probabilistic deployment for multiple sensor systems,” Proc. SPIE, 2005

Problem Formulation
5

Problem Formulation: Aerial Robotic Sensor Path Planning
WAAW r13 ⊂=⊂ },, { plaftormssensor robotic where,RpaceGiven work Ar
WBB W,SS n1r1 ⊂=⊂= },, { obstacles fixed },, { FOVsensor with BnS
.)(Z)]([benefitnobservatioexpextedsomeoptimizeto
},],1,0[, )(|Z{)(tsmeasuremenofsequenceaFind
:Purpose
)(Zi∑
∈
=
∈∈=≠∩=
τ
τ
τφτ
Z
Tiiii
i
VZV
Iis(s),Z qqST
State 𝐪𝐪𝑖𝑖 = 𝑥𝑥𝑖𝑖 𝑦𝑦𝑖𝑖 𝑧𝑧𝑖𝑖 𝜃𝜃𝑖𝑖 𝑇𝑇
1A
2A
2S
WTT m1 ⊂= },, { targetsfixed Tm
1B2B
3B
1T
2T
3T
1SW

Problem Formulation: Aerial Robotic Sensor Dynamics
1A
1S
𝑀𝑀�̈�𝐏 = −𝜇𝜇𝑓𝑓𝐑𝐑𝐞𝐞𝟑𝟑 + 𝑀𝑀𝑀𝑀𝐞𝐞3
�̇�𝐑 = 𝐑𝐑𝐑𝐑 𝐰𝐰
𝐉𝐉�̇�𝐰 = 𝐑𝐑 𝐉𝐉𝐰𝐰 𝐰𝐰 + 𝛍𝛍𝜏𝜏
𝐏𝐏 = 𝑥𝑥𝑖𝑖 𝑦𝑦𝑖𝑖 𝑧𝑧𝑖𝑖
𝐰𝐰 = 𝐰𝐰𝑥𝑥 𝐰𝐰𝑦𝑦 𝐰𝐰𝑧𝑧
𝐞𝐞𝟑𝟑 = 𝟎𝟎 𝟎𝟎 𝟏𝟏 𝑇𝑇
𝑺𝑺 𝑥𝑥1 𝑥𝑥2 𝑥𝑥3 𝑇𝑇
=0 −𝑥𝑥3 𝑥𝑥2𝑥𝑥3 0 −𝑥𝑥1−𝑥𝑥2 𝑥𝑥1 0
• Motion dynamics
P ∈ ℝ3: position of center gravity
w ∈ ℝ3: angular speed (body frame)
R ∈ ℝ3×3: rotation matrix(body→inertial)
M ∈ ℝ>0: mass
J ∈ ℝ3×3: inertia matrix
𝜇𝜇𝑓𝑓 ∈ ℝ≥0: control force
𝛍𝛍𝜏𝜏 ∈ ℝ3: control torque vector
Methodology
11

Information Value
Conditional mutual information
Conditional entropy
Information Benefit to have Zi I(X;Y|z)H(X|Y,z) H(Y|X,z)
H(X|z) H(Y|z)
( ) ( ) log ( )x
H X p x p x∈
= −∑X
Entropy
M. Cover and J. Thomas, Elements of Information Theory, 1991
𝐻𝐻 𝑋𝑋 𝑍𝑍𝑖𝑖 = �𝑧𝑧𝑖𝑖∈𝒵𝒵
𝑝𝑝 𝑧𝑧𝑖𝑖 𝐻𝐻 𝑋𝑋 𝑧𝑧𝑖𝑖
𝐼𝐼 𝑋𝑋;𝑍𝑍𝑖𝑖 𝜆𝜆 = 𝐻𝐻 𝑋𝑋 𝜆𝜆 − 𝐻𝐻 𝑋𝑋 𝑍𝑍𝑖𝑖 , 𝜆𝜆
𝑉𝑉 𝑍𝑍𝑖𝑖 = 𝐼𝐼(𝑋𝑋;𝑍𝑍𝑖𝑖|𝜆𝜆)
𝐼𝐼(𝑋𝑋;𝑍𝑍𝑖𝑖|𝜆𝜆)𝐻𝐻 𝑋𝑋 𝑍𝑍𝑖𝑖 , 𝜆𝜆 𝐻𝐻 𝑍𝑍𝑖𝑖 𝑋𝑋, 𝜆𝜆
𝐻𝐻 𝑋𝑋 𝜆𝜆 𝐻𝐻 𝑍𝑍𝑖𝑖 𝜆𝜆

Hybrid Controller
Cascade control**
Information potential*
**R. Naldi, M. Furci, “Global Trajectory Tracking for Underactuated VTOL Aerial Vehicles using a Cascade Control Paradigm”, IEEE Conference on Decision and Control, 2013
*W. Lu, G. Zhang, and S. Ferrari, “An Information Potential Approach to Integrated Sensor Path Planning and Control” IEEE Transaction on Robotics, to appear
Low level controller
Mode plannerHigh level controller
ReferencesControl input
ConfigurationReferences
UAV simulatorControl inputConfiguration

Information Potential Field Construction
Novel attractive potentialthe ith target )1()( 2
)(
2
2
ai
ti
Vaiatti eVU σ
ρ
σηq
q−
−=
Potential at q attrep UUU )()()( qqq +=
Total attractive potential ∏==
m
i attiatt UU1
Repulsive potentialof the ith obstacle
>
≤
−=
0
0
2
01
)(if0
)(if)(1)(
121
)(ρρ
ρρρρ
η
q
qqqq
bi
biattb
irepiUU
∑=
=n
irepirep UU
1)()( qqTotal repulsive potential
Potential between tworobotic sensors
>
≤
−=
0
0
2
03
)(if0
)(if)(1)(
121
)(
ρρ
ρρρρ
η
q
qqqq
rjk
rjkattr
jkj
rkUU
*W. Lu, G. Zhang, and S. Ferrari, “An Information Potential Approach to Integrated Sensor Path Planning and Control” IEEE Transaction on Robotics, to appear

Connection Between IRD and Potential Field Methods
When the robotic sensor is at a local minimum, randomly generate milestones in surrounding subspace
Milestones distribution
A function of the potential at q, , is used to measure the probability
∉
∈= ∫ −
−
A
Ade
e
fA
U
U
q
qqq q
q
if0
if)( )(
)(
)(qUe−
of sampling a milestone at q.

Escaping Local Minima by IRD method
The milestones are connected to the local minimum to construct the roadmap
A path from the local minimum to a milestone with lower potential than the potential at the local minimum is found.

High Level Control and Low Level Control
High Level Control:1. Fix time step as 𝑑𝑑𝑑𝑑,
Low Level Cascade Control*:1. Position Control Law2. Attitude Control Law
*R. Naldi, M. Furci, “Global Trajectory Tracking for Underactuated VTOL Aerial Vehicles using a Cascade Control Paradigm”, IEEE Conference on Decision and Control, 2013
2. Information Potential
21111)(21
)()()(
dtIMMM
U
dtttdttT
j
jjr
⊗∇−
+=+
q
qqq
attrep UUU )()()( qqq +=
Results
18
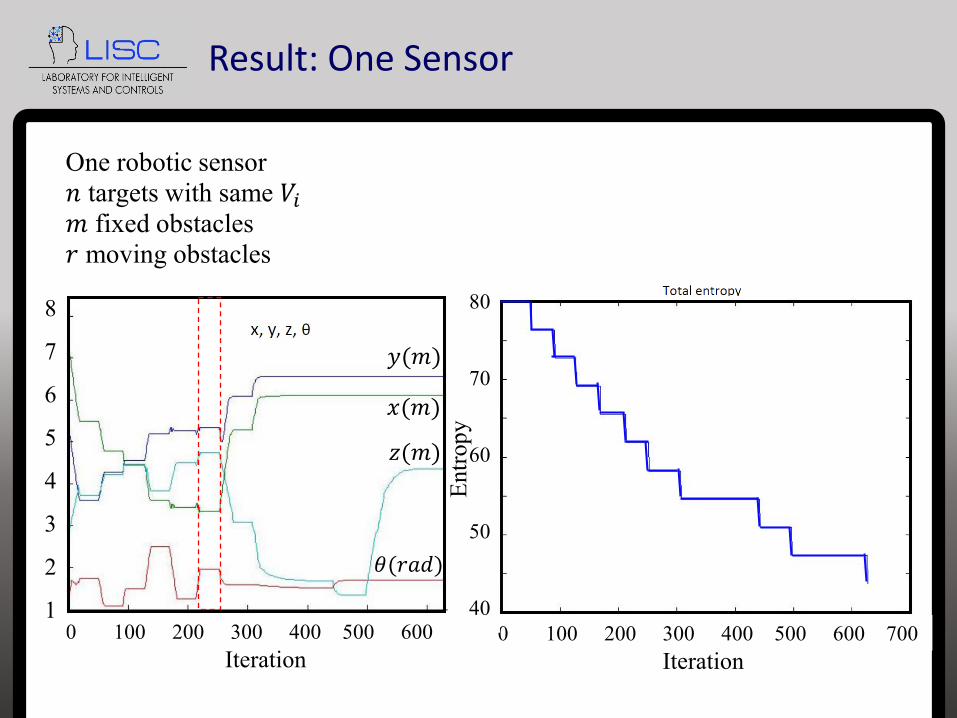
Result: One Sensor
One robotic sensor𝑛𝑛 targets with same 𝑉𝑉𝑖𝑖𝑚𝑚 fixed obstacles 𝑟𝑟 moving obstacles
𝜃𝜃(𝑟𝑟𝑟𝑟𝑑𝑑)
𝑥𝑥(𝑚𝑚)
𝑧𝑧(𝑚𝑚)
𝑦𝑦(𝑚𝑚)
0 100 200 300 400 500 600 700Iteration
80
70
60
50
40
Entro
py
0 100 200 300 400 500 600Iteration
8
7
6
5
4
3
2
1

Result: Two Sensors
𝑉𝑉 𝑍𝑍𝑖𝑖
Rwide
Rpricise
𝑉𝑉𝑤𝑤𝑖𝑖𝑤𝑤𝑤𝑤 = 3.67𝑉𝑉𝑝𝑝𝑝𝑝𝑤𝑤𝑝𝑝𝑖𝑖𝑝𝑝𝑤𝑤 = 0.35
0 50 100 150 200 250 300𝑥𝑥𝑖𝑖
8
7
6
5
4
3
First sensor ( Rwide ): Range [1, 256], white Gaussian noise of 𝜎𝜎 = 5
Second sensor ( Rprecise ): Range [5, 25], white Gaussian noise of 𝜎𝜎 = 0.1
One target:𝑃𝑃 𝑋𝑋 = 𝑥𝑥𝑖𝑖 = 1
256, 𝑥𝑥𝑖𝑖 ∈ 1,2,⋯ , 256

Result: Two Sensors
𝑃𝑃 𝑋𝑋 = 𝑥𝑥𝑖𝑖
After Rwide senses the target,
𝑉𝑉𝑤𝑤𝑖𝑖𝑤𝑤𝑤𝑤 = 0,𝑉𝑉𝑝𝑝𝑝𝑝𝑤𝑤𝑝𝑝𝑖𝑖𝑝𝑝𝑤𝑤 > 0
𝑥𝑥𝑖𝑖
𝑃𝑃 𝑥𝑥𝑖𝑖
0 50 100 150 200 250 300𝑥𝑥𝑖𝑖
8
7
6
5
4
3
2
1
0

Conclusions
• Hybrid controller for aerial robotic sensor path planning • Information potential and reference model are integrated to design high
level controller• Cascade controller navigates sensor along reference trajectories• Maximizing classification performance.
Acknowledgement• This work was supported by the National Science Foundation under
grant• ECCS 1028506 and the FP7 European project SHERPA (IP 600958).