indice anexo a: estudio del Árbol articulado anexo b
TRANSCRIPT
Anexo Pág. 1
INDICE
ANEXO A: ESTUDIO DEL ÁRBOL ARTICULADO
A.1 INTRODUCCIÓN 5
A.2 SISTEMA DE TRANSMISIÓN EN VEHÍCULOS CON TRACCIÓN
DELANTERA 5
A.3 ÁRBOLES ARTICULADOS 6
A.3.1 Juntas homocinéticas…………………………………………………………..7
A.3.1.1 Funcionamiento………………………………………………………8
A.3.1.2 Tipos de juntas homocinéticas………………………………………10
A.3.1.3 Vida a fatiga……….……………………………………...................12
A.3.2 Árboles……………………………….......……………………………....…....12
A4. CARACTERÍTICAS DE LOS ÁRBOLES ARTICULADOS A ENSAYAR 13
ANEXO B: CÁLCULOS
B.1 MOMENTO DE ENSAYO SOBRE EL ÁRBOL ARTICULADO 17
B.2 VELOCIDAD ANGULAR DE ENSAYO 19
B.3 MOMENTO DE INERCIA DE LOS ELEMENTOS ROTATIVOS 21
B.3.1 Elementos consultados en catálogo……………………………………………21
B.3.1.1 Actuador rotativo hidráulico………………………………………...21
B.3.1.2 Embrague electromagnético que protege la entrada de rotación…….21
B.3.1.3 Embragues electromagnéticos que protegen la entrada de momento..21
B.3.2 Elementos de los que se calcula el momento de inercia……………………….22
B.3.2.1 Elementos cilíndricos………………………………………………22
B.3.2.1.1 Árboles articulados…………………………………..……22
Pág. 2 Anexo
B.3.2.1.2 Árboles solidarios a los actuadores………………………..23
B.3.2.1.3 Árbol de accionamiento…………………………………...24
B.3.2.1.4 Árbol de unión de los especimenes………………………24
B.3.2.1.5 Árboles solidarios a los engranajes de fin de cadena….…...25
B.3.2.2 Elementos sólidos anulares cilíndricos………………………….…26
B.3.2.2.1 Engranaje de accionamiento y engranajes de fin de cadena.26
B.3.2.2.2 Engranajes solidarios a los actuadotes rotativos…………...27
B.4 MOMENTO DE ACCIONAMIENTO NECESARIO 29
B.5 DIMENSIONAMIENTO DE LOS ENGRANAJES 31
B.5.1 Anteproyecto…………………………………………………………………31
B.5.1.1 Velocidad media de rotación del engranaje…………………………31 B.5.1.2 Velocidad tangencial periférica……………………………………32 B.5.1.3 Determinación de admK ………………………………………..........33
B.5.1.4 Diámetro primitivo o de funcionamiento mínimo…………………33
B.5.1.5 Determinación del módulo ( 0m ) mínimo…………………………....34
B.5.2 Parámetros de generación……………………………………........................34 B.5.3 Parámetros de definición………………………………….................................35 B.5.4 Parámetros de funcionamiento……………………………................................37
B.5.5 Condiciones de engrane…………………………………...................................38 B.5.5.1 Recubrimiento mínimo…………………………………....................38 B.5.5.2 Interferencia de funcionamiento………………………………..........39 B.5.5.3 Juego de fondo mínimo…………………………………...................39
B.6 DETERMINACIÓN DE LAS CARACTERÍSTICAS DE FUNCIONAMIENTO
DEL ACTUADOR ROTATIVO 41
B.6.1 Cálculo del caudal hidráulico mínimo necesario………………………………41 B.6.2 Desplazamiento angular máximo de la aplicación maxθ ……………………..41
B.6.3 Frecuencia de aplicación del momento de torsión f …………………………...44 B.6.4 Selección de la servo-válvula………………………………..............................45
Anexo Pág. 3
B.7 DETERMINACIÓN DE LAS CARACTERÍSTICAS DE FUNCIONAMIENTO
DEL ACTUADOR LINEAL 47
B.7.1 Determinación de la carrera necesaria del vástago………………......................47
B.7.2 Determinación de la fuerza necesaria……………………………….................50
B.7.3 Cálculo del caudal hidráulico mínimo necesario…………………………........52
B.7.4 Selección de la servo-válvula………………………………..............................53
B.8 DIMENSIONAMIENTO DEL ÁRBOL SOLIDARIO AL ACTUADOR 55
B.8.1 Determinación de las solicitaciones………………………………....................55
B.8.2 Diagramas de esfuerzos……………………………….......................................56 B.8.3 Cálculo del diámetro del árbol………………………….....................................57 B.8.4 Cálculo de las tensiones……………………………….......................................58 B.8.5 Comprobación a fatiga……………………………….........................................59
B.9 DIMENSIONAMIENTO DEL ÁRBOL SOLIDARIO AL ENGRANAJE DE
FINAL DE CADENA 61
B.9.1 Determinación de las solicitaciones………………………………....................61
B.9.2 Diagramas de esfuerzos……………………………….......................................63 B.9.3 Cálculo del diámetro del árbol según su resistencia…………………………65
B.9.4 Cálculo del diámetro del árbol según su deformación……….............................67
B.9.4.1 Deformación debida al momento flector Zf
M ………………………68
B.9.4.2 Deformación debida al momento flector XfM ……….........................68
B.9.4.3 Determinación del diámetro necesario………......................................69
B.9.5 Comprobación………………………………......................................................69
B.9.5.1 Cálculo de las tensiones…………………..........................................69 B.9.5.2 Comprobación a fatiga…………………..............................................71 B.9.5.3 Comprobación de la deformación del árbol………….........................73
B.10 RODAMIENTOS DEL ÁRBOL SOLIDARIO AL ENGRANAJE DE FINAL DE
CADENA 75
B.10.1 Determinación de las cargas……………………..............................................75
Pág. 4 Anexo
B.10.2 Carga dinámica equivalente P. ………………….............................................76
B.10.3 Cálculo de la vida……………………...............................................................77
B.11 COMPROVACIÓN DEL TIRANTE DEL SUBCONJUNTO B 79
B.11.1 Determinación de las solicitaciones…………...................................................79
B.11.2 Determinación de las tensiones…………...........................................................82
B.12 RESISTENCIA DE LOS COJINETES EN QUE SE APOYA EL TIRANTE 85
B.13 SELECCIÓN DE LOS TORNILLOS DEL ACOPLAMIENTO A LA JUNTA EN
EL SUBCONJUNTO B 87
B.13.1 Selección de la métrica y de la clase de resistencia…………...........................87
B.14 SELECCIÓN DE LOS TORNILLOS DEL ACOPLAMIENTO ENTRE
VÁSTAGO Y CARCASA EN EL SUBCONJUNTO B 91
B.14.1 Determinación de la fuerza separadora…………..............................................91 B.14.2 Selección de la métrica y de la clase de resistencia............................................92
B.14.3 Comprobación......................................................................................................93
ANEXO C: ESTUDIO ECONÓMICO
C.1 INTRODUCCIÓN 97
C.2 PRECIO UNITARIO DE LOS ELEMENTOS 97
C.2.1 Elementos que se compran……………………………………………………97
C.2.2 Elementos de los que se encarga la fabricación......……………………………98
C.3 COSTE DEL DISEÑO Y MONTAJE DEL BANCO DE ENSAYO 99
C.4 PRECIO TOTAL DEL BANCO DE ENSAYO 99
Anexo Pág. 5
A. ESTUDIO DEL ÁRBOL ARTICULADO
A.1 INTRODUCCIÓN
En este apartado se pretende, partiendo del sistema en el que trabaja el árbol articulado,
realizar una definición de cada elemento constituyente del componente, que facilite la
comprensión de la terminología utilizada.
A.2 SISTEMA DE TRANSMISIÓN EN VEHÍCULOS CON TRACCIÓN
DELANTERA
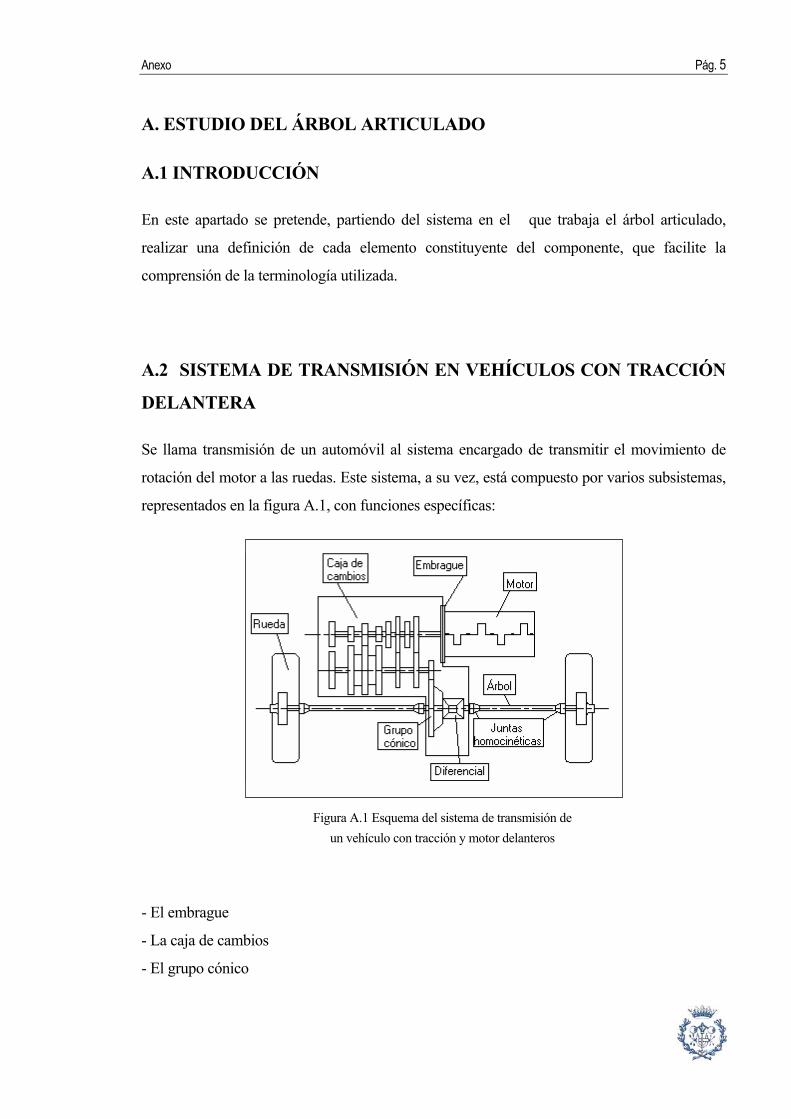
Se llama transmisión de un automóvil al sistema encargado de transmitir el movimiento de
rotación del motor a las ruedas. Este sistema, a su vez, está compuesto por varios subsistemas,
representados en la figura A.1, con funciones específicas:
- El embrague
- La caja de cambios
- El grupo cónico
Figura A.1 Esquema del sistema de transmisión de un vehículo con tracción y motor delanteros

Pág. 6 Anexo
- El diferencial
- Las juntas y árboles de transmisión.
El embrague constituye una unión desacoplable, colocada entre el motor y la caja de cambios.
Cuando está conectado, transmite el momento de giro del motor al mecanismo de cambio de
velocidades.
La caja de cambios es un elemento de transmisión que se interpone entre el motor y las ruedas
para modificar el número de revoluciones de las mismas e invertir el sentido de giro cuando
las necesidades de la marcha así lo requieran. Por tanto, actúa como transformador de la
velocidad y convertidor mecánico de par.
El grupo cónico es el elemento transmisor, convertidor y reductor del movimiento de las
ruedas. El giro que recibe el piñón de ataque procedente de la caja de cambios, lo transmite a
una corona, la cual por su posición transversal, coincide con el eje de las ruedas y produce el
giro de las mismas.
El diferencial divide al eje motriz en dos semiejes independientes, de forma que permite que
las ruedas giren a distinta velocidad cuando la trayectoria del vehículo así lo requiere.
Finalmente las juntas y árboles de transmisión, que forman el conjunto que se someterá a
ensayo, constituyen el sistema de enlace entre el grupo cónico diferencial y las ruedas
motrices.
A.3 ÁRBOLES ARTICULADOS
Se llama árbol articulado al conjunto formado por el árbol de transmisión y las juntas
homocinéticas, que puede observarse en la figura A.2
Las solicitaciones a que está sometido son debidas, principalmente a los pares de torsión que
debe transmitir. El valor de éstos depende de las características, del mecanismo de transmisión
del cual forman parte, y del motor que incorpora el vehículo.

Anexo Pág. 7
A continuación se realiza una descripción de cada uno de los constituyentes por separado.
A.3.1 Juntas homocinéticas
Como el grupo motopropulsor es fijo y las ruedas van montadas sobre un sistema elástico de
suspensión, éstas se hallan sometidas a continuos desplazamientos de vaivén por las
irregularidades del terreno. Por consiguiente, el conjunto formado por motor, caja de cambios,
grupo cónico y diferencial no puede ir unido rígidamente a las ruedas, sino que debe estar
construido para adaptarse a esas deformaciones.
En el caso de que las ruedas delanteras sean las motrices, se debe tener en cuenta que estas
ruedas son también las de dirección. Por este motivo, los árboles en este tramo de la
transmisión, deben disponer de articulaciones que hagan posible la adaptación a las diferentes
configuraciones angulares de las ruedas.
Es por tanto necesario un elemento, capaz de transmitir movimiento y par entre ejes
desalineados, y que mantenga las velocidades de rotación de ambos, en torno a un mismo
valor. Estas articulaciones reciben el nombre de juntas homocinéticas.
Figura A.2 Conjunto formado por árbol y juntas homocinéticas
Pág. 8 Anexo
A.3.1.1 Funcionamiento
Cuando trabajan las juntas homocinéticas, los elementos solicitados son los actúan como
contactos entre pistas (suelen ser esféricos) y las propias pistas de rodadura.
La fuerza de compresión que origina el par, está distribuida por el total de las bolas activas,
siendo determinante la tensión ejercida entre éstas y las pistas que las guían. La tensión
admisible entre los dos elementos se calcula, tanto estática como dinámicamente, según la
teoría de las presiones de Hertz. Esto es debido a que el sistema de rodadura pone en contacto
dos superficies curvas de distinta curvatura y el rozamiento de rodadura es escaso frente al
rozamiento de deslizamiento.
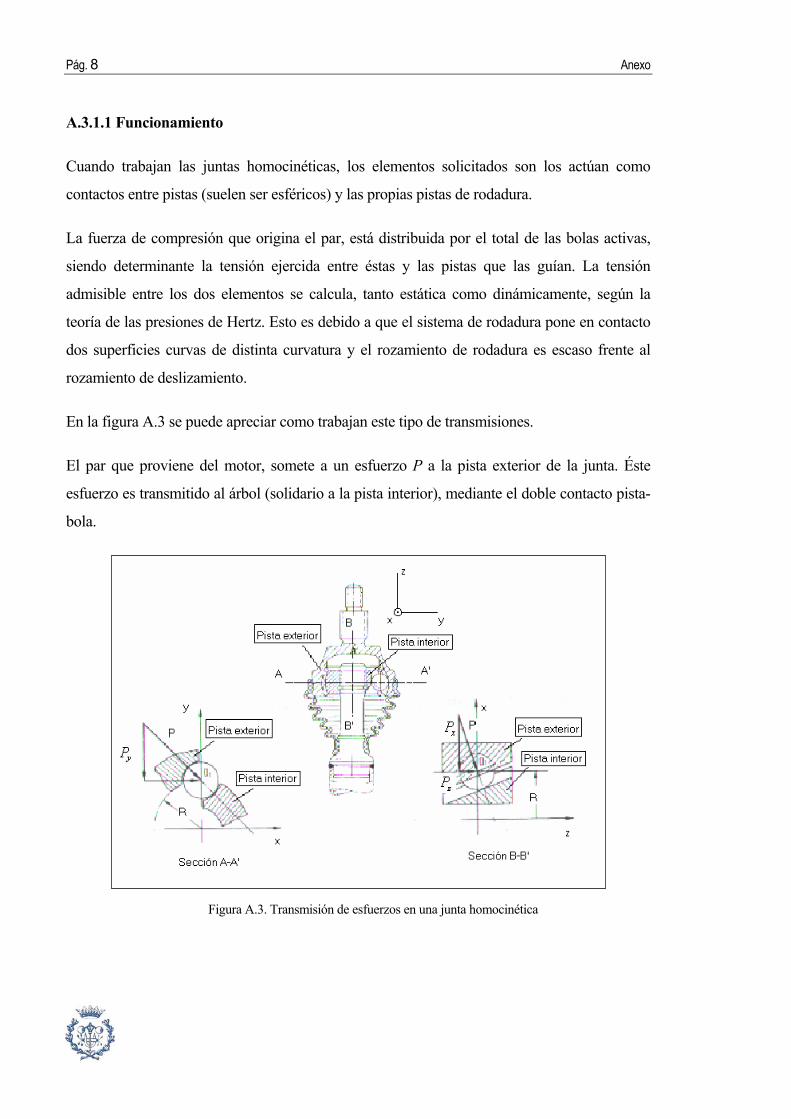
En la figura A.3 se puede apreciar como trabajan este tipo de transmisiones.
El par que proviene del motor, somete a un esfuerzo P a la pista exterior de la junta. Éste
esfuerzo es transmitido al árbol (solidario a la pista interior), mediante el doble contacto pista-
bola.
Figura A.3. Transmisión de esfuerzos en una junta homocinética
Anexo Pág. 9
Seccionando una junta por un plano perpendicular al árbol (sección A-A), se puede apreciar la
componente de P que provoca el esfuerzo de torsión del árbol arbolΓ , o zΓ en el sistema de
coordenadas definido en la figura A.3. Esta componente, no es otra que XP y se relaciona con
zΓ mediante la siguiente expresión:
z Xn R PΓ = ⋅ ⋅ (Ec. A.1)
n = número de bolas activas
R = distancia desde el centro de las bolas al centro de la junta (ver figura A.3)
En la misma sección A-A se puede identificar la otra componente de P en el plano de
corte, YP , la cual somete al árbol a esfuerzos de flexión.
Observando la otra sección (B-B) contenida en la figura, se observa como novedad la
componente zP que también somete al árbol a esfuerzos de flexión.
La determinación numérica de las componentes zP y YP resulta muy compleja, ya que en todo
momento dependen de la configuración angular entre bolas y pistas.
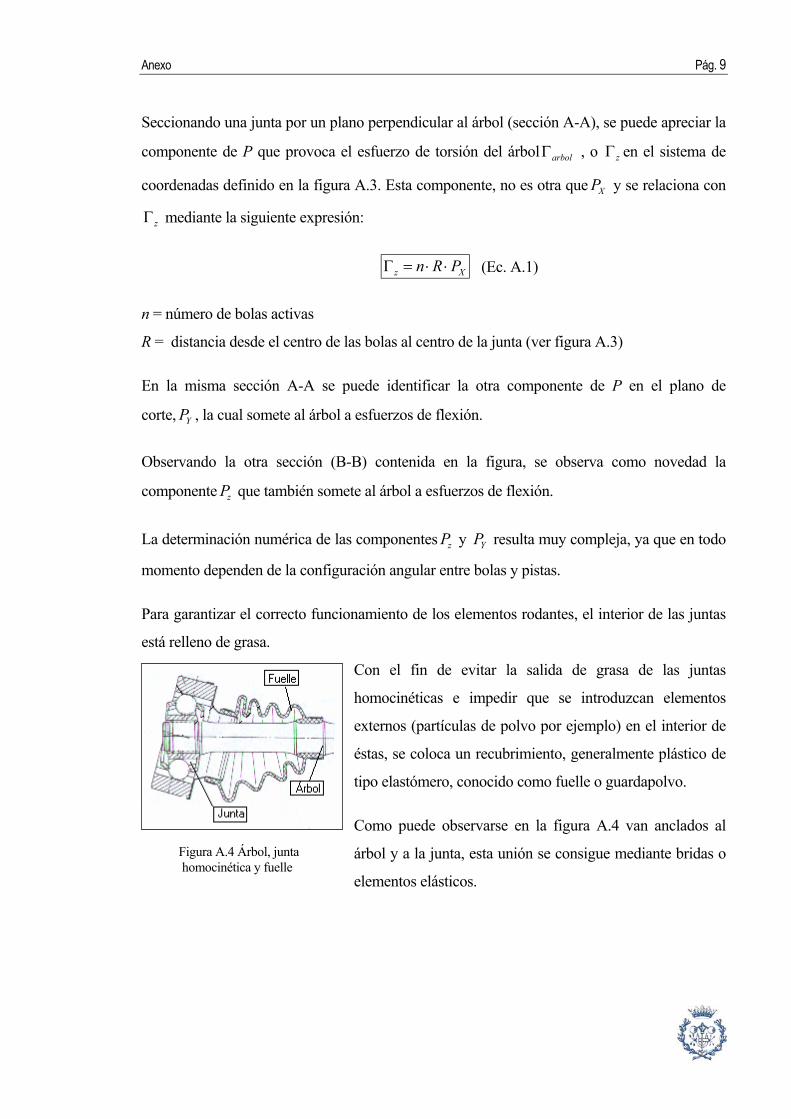
Para garantizar el correcto funcionamiento de los elementos rodantes, el interior de las juntas
está relleno de grasa.
Con el fin de evitar la salida de grasa de las juntas
homocinéticas e impedir que se introduzcan elementos
externos (partículas de polvo por ejemplo) en el interior de
éstas, se coloca un recubrimiento, generalmente plástico de
tipo elastómero, conocido como fuelle o guardapolvo.
Como puede observarse en la figura A.4 van anclados al
árbol y a la junta, esta unión se consigue mediante bridas o
elementos elásticos.
Figura A.4 Árbol, junta homocinética y fuelle

Pág. 10 Anexo
A.3.1.2 Tipos de juntas homocinéticas
Según la función que realizan, existen dos tipos de juntas homocinéticas:
- Juntas tipo centro fijo (“Fixed center type” [SAE J901]), son solidarias a la rueda, a través
del semieje que puede observarse en la figura A.5. Este semieje se introduce en el buje de la
rueda, y se atornilla su extremo.
Este tipo de juntas, permite desalineaciones angulares entre la dirección axial del árbol, y la
dirección axial del semieje de la junta, de entre 20º y 50º.
- Juntas tipo extremo móvil (“End motion type” [SAE J901]), son solidarias al grupo cónico
diferencial (lado motor) y permiten una menor desalineación (aproximadamente 20º-25º como
máximo). Esta desalineación se produce entre la dirección longitudinal del árbol, y la
dirección perpendicular a la cara de la junta, por la que entra el árbol.
Figura A.5 Junta tipo centro fijo
Figura A.6 Junta tipo extremo móvil
Anexo Pág. 11
Además de la adaptabilidad angular, este tipo de juntas permiten un cierto recorrido del árbol
respecto a su dirección longitudinal, de 20mm a 50mm. Como puede apreciarse en la figura
A.6, este recorrido o carrera, puede darse en ambos sentidos y adapta la longitud del árbol
libre (entre centros de junta), a diferentes configuraciones angulares de las juntas.
En cuanto a la forma constructiva que pueden presentar, existen principalmente dos tipos de
articulaciones homocinéticas: las juntas de bolas y las juntas poidales.
Las juntas de bolas, como su propio nombre indica, utilizan como órganos de transmisión del
par, pequeñas esferas que giran de manera independiente guiadas por unas pistas.
Según sea la disposición entre bolas y pistas, se distinguen dos tipos de juntas homocinéticas
de bolas:
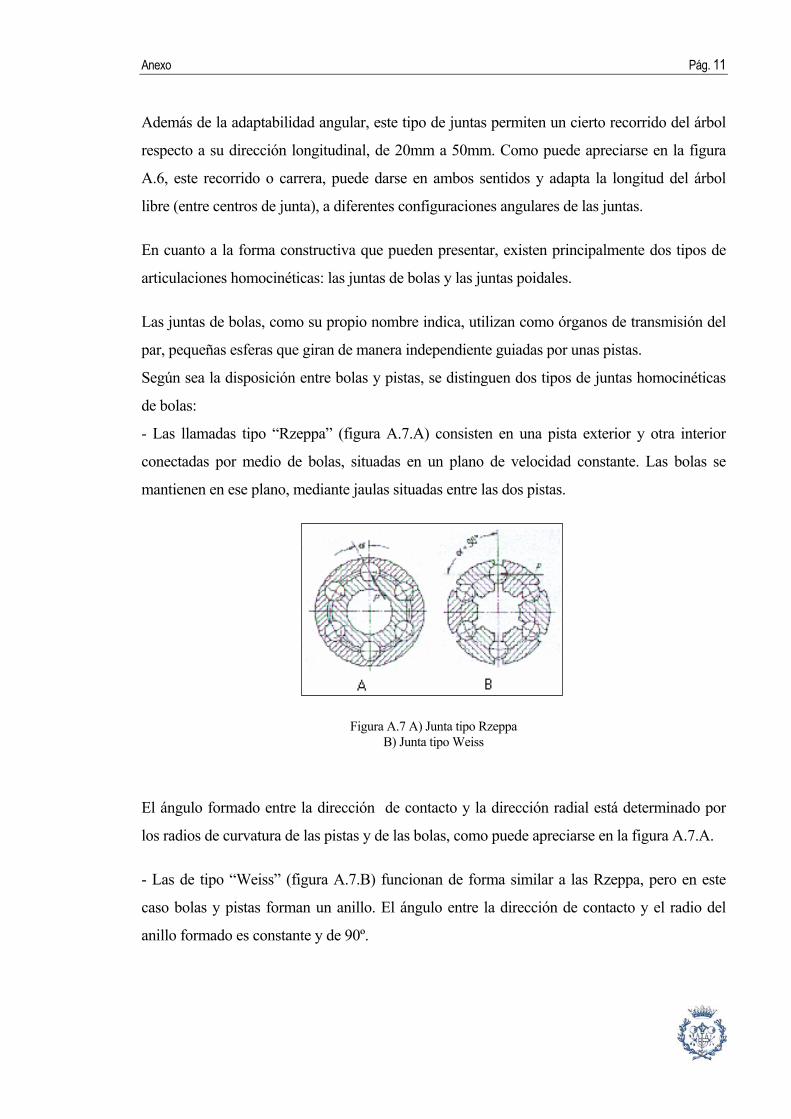
- Las llamadas tipo “Rzeppa” (figura A.7.A) consisten en una pista exterior y otra interior
conectadas por medio de bolas, situadas en un plano de velocidad constante. Las bolas se
mantienen en ese plano, mediante jaulas situadas entre las dos pistas.
El ángulo formado entre la dirección de contacto y la dirección radial está determinado por
los radios de curvatura de las pistas y de las bolas, como puede apreciarse en la figura A.7.A.
- Las de tipo “Weiss” (figura A.7.B) funcionan de forma similar a las Rzeppa, pero en este
caso bolas y pistas forman un anillo. El ángulo entre la dirección de contacto y el radio del
anillo formado es constante y de 90º.
Figura A.7 A) Junta tipo Rzeppa B) Junta tipo Weiss

Pág. 12 Anexo
Las juntas poidales tienen un funcionamiento idéntico al de las de bolas, con la principal
salvedad (existen otras constructivas de menor importancia) de que los elementos de contacto
no son esféricos sino que adoptan otras geometrías, como por ejemplo cilíndrica. El número
de contactos activos queda definido por el nombre de la junta (por ejemplo en las tripoidales
existen tres contactos activos).
A.3.1.3 Vida a fatiga
La vida a fatiga de las juntas homocinéticas depende de tres variables [Schmelz et al., 1992,
p.124]: la velocidad de giro del semieje respecto a su dirección longitudinal (ω ), el par de
torsión transmitido ( M ), y el ángulo formado entre las direcciones longitudinales de junta y
árbol (α ).
La expresión mediante la cual se obtiene el número de horas de vida ( Lh ), comparándola con
la vida para unas condiciones de par, ángulo y velocidad, ya conocidas, es la siguiente:
3 3
2 1 1 1
1 2 2 2
aLh MLh M
ω αω α
= ⋅ ⋅
(Ec.A.2)
Dónde el parámetro “a” depende de la velocidad de rotación de la forma siguiente:
A.3.2 Árboles
El árbol de transmisión un automóvil con tracción delantera, actúa como intermediario entre el
motor y las resistencias que se oponen al giro de la rueda. Por este motivo debe ser capaz de
transmitir toda la fuerza del motor y resistir el máximo de revoluciones sin fallar (ya sea por
rotura o deformación excesiva).
En el apartado anterior se ha visto que tipo de esfuerzos recibe el árbol de las juntas
homocinéticas. Por un lado está sometido a tensiones cortantes en su sección, debido a la
1000 0.5771000 1
n rpm an rpm a≤ → => → =
Anexo Pág. 13
componente que se encarga de transmitir el par de torsión entre el motor y las ruedas del
vehículo. Por otro lado, las irregularidades del pavimento y las diferentes configuraciones del
mecanismo de dirección, provocan momentos flectores en direcciones perpendiculares a la
longitudinal del árbol, tal y como puede apreciarse en la figura A.3. Este hecho provoca que se
halle sometido también a esfuerzos de tracción-compresión, muy difíciles de determinar sin
ayuda extensométrica.
La vida a fatiga de un árbol depende del valor de las tensiones a las que está sometido, y de la
tensión admisible máxima a fatiga del material, del que está compuesto.
Se fabrican en tubo de acero C45 F-1140 (UNE 36.011), su sección longitudinal generalmente
tiene forma de huso (más grueso por el centro) y debe estar perfectamente equilibrado.
La posición del grupo cónico-diferencial no suele estar centrada con respecto a la distancia a
las ruedas. Por este motivo, la longitud de los árboles que actúan en un automóvil es diferente.
Es decir existe un árbol más largo que el otro.
A.4 CARACTERÍSTICAS DE LOS ÁRBOLES ARTICULADOS
SUJETOS A ENSAYO
Los árboles articulados que se pretenden ensayar, y a partir de los cuales se diseñara el banco
son los siguientes.
Se distingue entre árbol articulado derecho e izquierdo, puesto que como se ha dicho, los
árboles son de longitud diferente. Las juntas homocinéticas utilizadas son iguales en ambos
casos.
De la información incluida se destaca la siguiente:
- Distancia entre centros de las juntas homocinéticas (árbol largo) = 641mm
- Distancia entre centros de las juntas homocinéticas (árbol largo) = 354mm
Pág. 14 Anexo
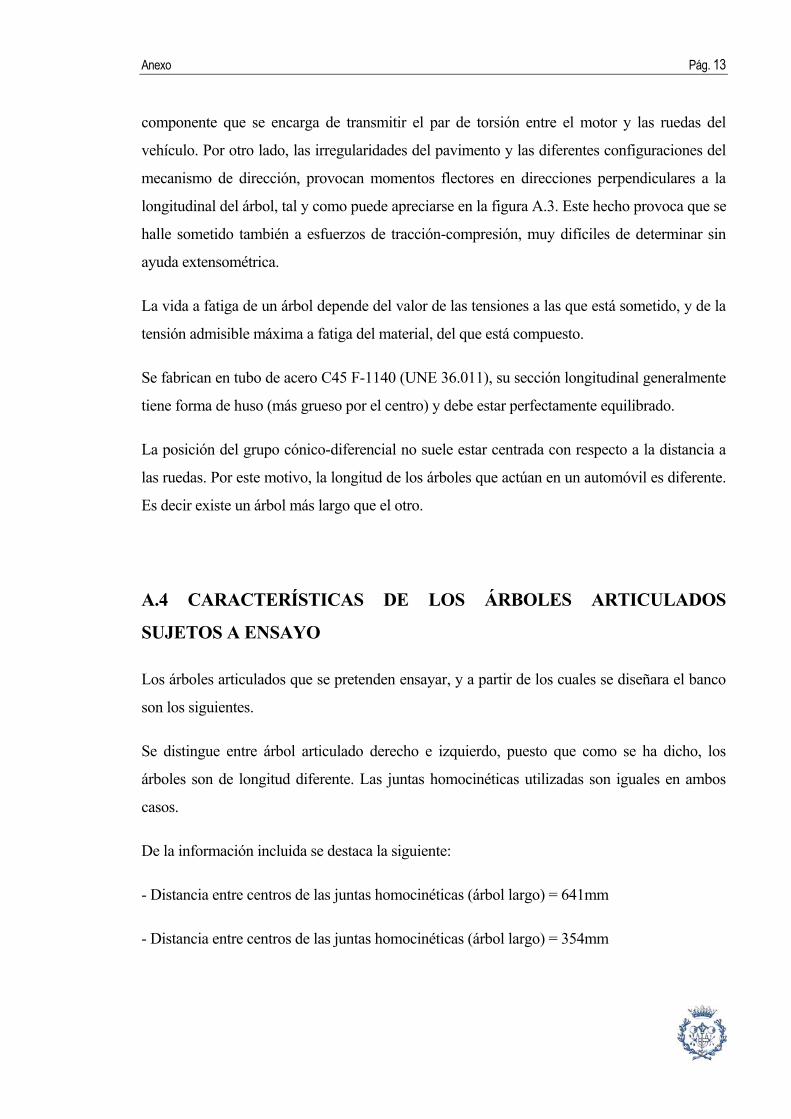
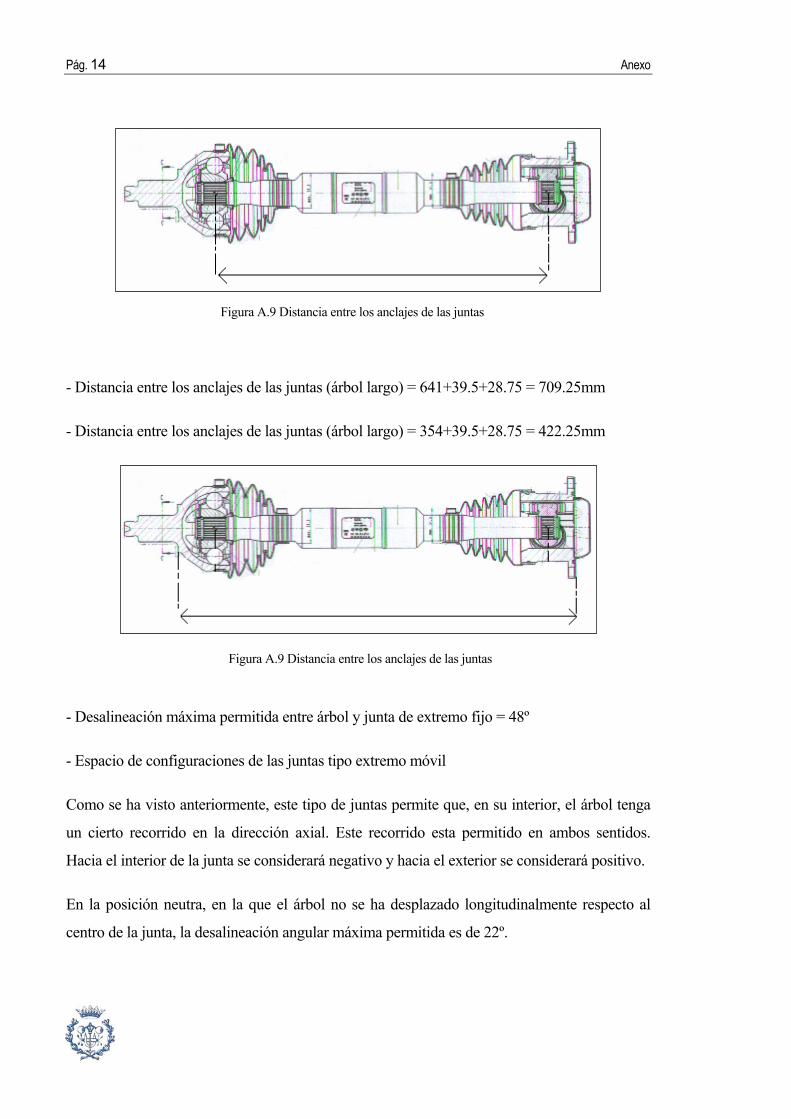
- Distancia entre los anclajes de las juntas (árbol largo) = 641+39.5+28.75 = 709.25mm
- Distancia entre los anclajes de las juntas (árbol largo) = 354+39.5+28.75 = 422.25mm
- Desalineación máxima permitida entre árbol y junta de extremo fijo = 48º
- Espacio de configuraciones de las juntas tipo extremo móvil
Como se ha visto anteriormente, este tipo de juntas permite que, en su interior, el árbol tenga
un cierto recorrido en la dirección axial. Este recorrido esta permitido en ambos sentidos.
Hacia el interior de la junta se considerará negativo y hacia el exterior se considerará positivo.
En la posición neutra, en la que el árbol no se ha desplazado longitudinalmente respecto al
centro de la junta, la desalineación angular máxima permitida es de 22º.
Figura A.9 Distancia entre los anclajes de las juntas
Figura A.9 Distancia entre los anclajes de las juntas
Anexo Pág. 15
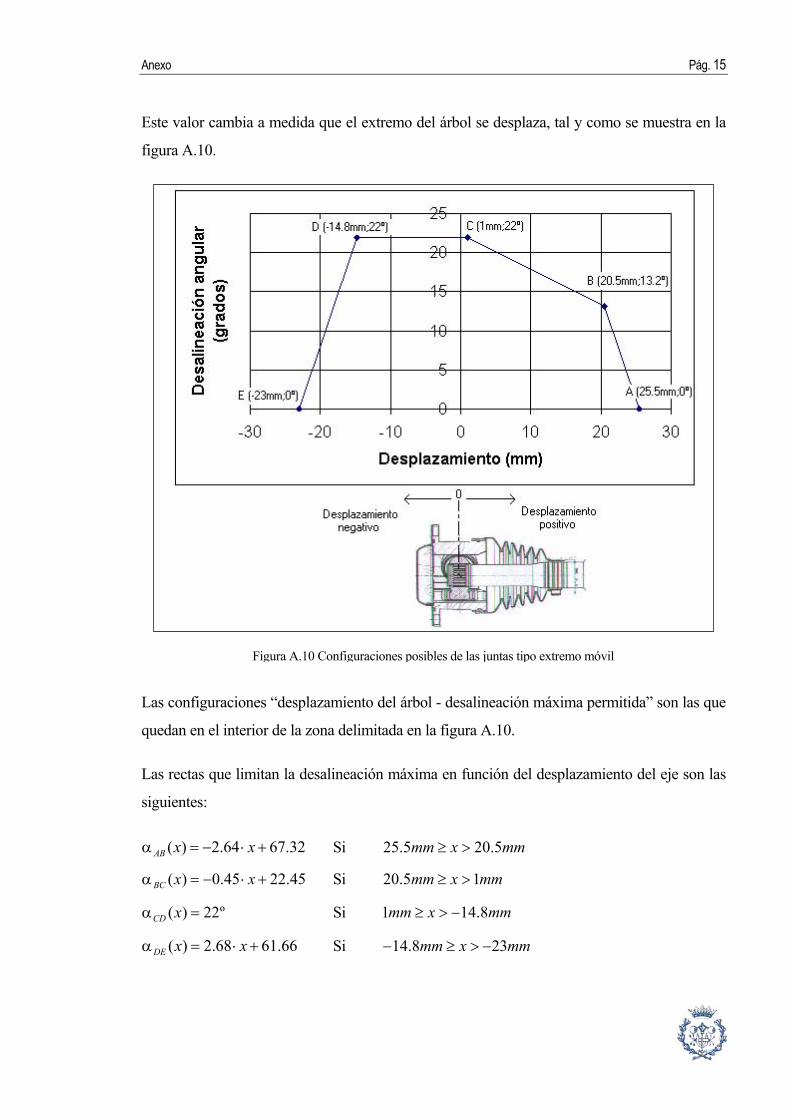
Este valor cambia a medida que el extremo del árbol se desplaza, tal y como se muestra en la
figura A.10.
Las configuraciones “desplazamiento del árbol - desalineación máxima permitida” son las que
quedan en el interior de la zona delimitada en la figura A.10.
Las rectas que limitan la desalineación máxima en función del desplazamiento del eje son las
siguientes:
( ) 2.64 67.32AB x xα = − ⋅ + Si 25.5 20.5mm x mm≥ >
( ) 0.45 22.45BC x xα = − ⋅ + Si 20.5 1mm x mm≥ >
( ) 22ºCD xα = Si 1 14.8mm x mm≥ > −
( ) 2.68 61.66DE x xα = ⋅ + Si 14.8 23mm x mm− ≥ > −
Figura A.10 Configuraciones posibles de las juntas tipo extremo móvil

Pág. 16 Anexo

Anexo Pág. 17
B. CÁLCULOS
B.1 MOMENTO DE ENSAYO SOBRE EL ÁRBOL ARTICULADO
Tal y como se ha explicado en el apartado 2.3.2 de la memoria, en cada ensayo se prueban
diez árboles articulados. Cada uno de ellos debe ser solicitado por un momento alternativo
(sinusoidal) de amplitud máxima constante. Esta amplitud es diferente para cada especimen
ensayado, y está acotada por el intervalo que delimitan los siguientes valores:
- Amplitud del momento mínimo:
mot_maxmin 32 dM i i
Γ= ⋅ ⋅ (Ec. B.1.1)
- Amplitud del momento máximo:
max9.811.15
2 dinMMA FRM r⋅ ⋅
= ⋅ ⋅ (Ec. B.1.2)
Como puede observarse los valores de la amplitud dependen del automóvil en el que van
instalados. En concreto dependen de las características de los elementos del sistema de
transmisión y propulsión. Por este motivo es necesario conocer las características, del vehículo
en el que van a ir instalados los especimenes.
Por otro lado, se pretende que el banco de ensayo sea versátil y por tanto, capaz de ensayar
especimenes de diferentes modelos de automóvil.
Por este motivo se determinarán las amplitudes del momento, a partir de las características de
un modelo estándar de automóvil. Como modelo se escoge el vehículo (cuyos árboles
articulados deben ser ensayados) con el mayor par motor máximo.
Las características de este modelo pueden comprobarse en la tabla B.1.1.
Pág. 18 Anexo
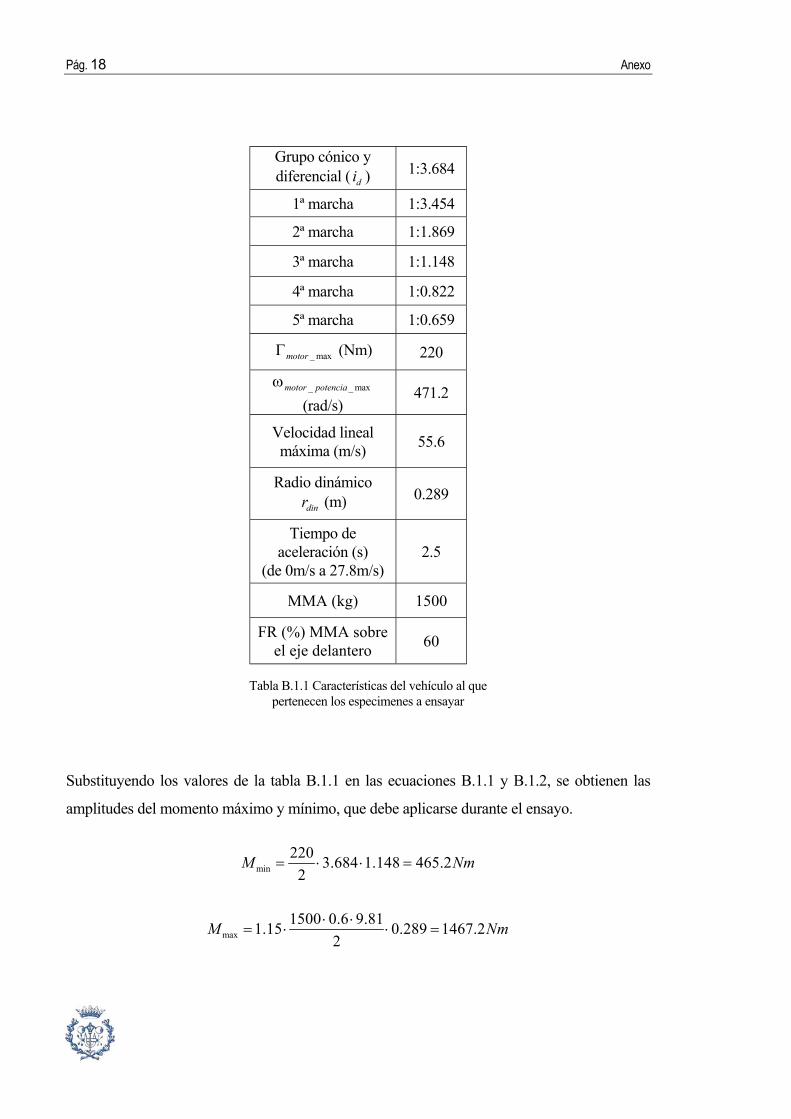
Substituyendo los valores de la tabla B.1.1 en las ecuaciones B.1.1 y B.1.2, se obtienen las
amplitudes del momento máximo y mínimo, que debe aplicarse durante el ensayo.
min220 3.684 1.148 465.2
2M Nm= ⋅ ⋅ =
max1500 0.6 9.811.15 0.289 1467.2
2M Nm⋅ ⋅
= ⋅ ⋅ =
Grupo cónico y diferencial ( di ) 1:3.684
1ª marcha 1:3.454
2ª marcha 1:1.869
3ª marcha 1:1.148
4ª marcha 1:0.822
5ª marcha 1:0.659
_ maxmotorΓ (Nm) 220
_ _ maxmotor potenciaω (rad/s)
471.2
Velocidad lineal máxima (m/s) 55.6
Radio dinámico dinr (m) 0.289
Tiempo de aceleración (s)
(de 0m/s a 27.8m/s) 2.5
MMA (kg) 1500
FR (%) MMA sobre el eje delantero 60
Tabla B.1.1 Características del vehículo al que pertenecen los especimenes a ensayar

Anexo Pág. 19
B.2 VELOCIDAD ANGULAR DE ENSAYO
Las velocidades a las que deben girar los especimenes durante el ensayo, y el porcentaje de
tiempo para cada una, están descritos en el apartado 2.3.2 de la memoria.
La expresión mediante la cual se obtiene el valor de la velocidad, que simula cada marcha i es
la siguiente:
_ _ maxmotor potenciaensayo
d ii iω
ω =⋅
(Ec. B.2.1)
Utilizando los datos de la tabla B.1.1:
- Primera marcha: _1ª
471.237.0
3.684 3.454ensayo
rads rad
sω = =⋅
- Segunda marcha: _ 2ª
471.268.4
3.684 1.869ensayo
rads rad
sω = =⋅
- Tercera marcha: _ 3ª
471.2111.4
3.684 1.148ensayo
rads rad
sω = =⋅
- Cuarta marcha: _ 4ª
471.2155.6
3.684 0.822ensayo
rads rad
sω = =⋅
- Quinta marcha: _ 5ª
471.2194.1
3.684 0.659ensayo
rads rad
sω = =⋅

Pág. 20 Anexo
Anexo Pág. 21
B.3 MOMENTO DE INERCIA DE LOS ELEMENTOS ROTATIVOS
B.3.1 Elementos consultados en catálogo
B.3.1.1 Actuador rotativo hidráulico Modelo MTS-217
Inercia de la parte dinámica del actuador ( _p dinamicaI ): 20.2000kg m⋅
Inercia de los acoplamientos ( acoplamientosI ): 20.0120kg m⋅
Momento de inercia total
2 2 2_ 0.2000 0.0120 0.2120actuador p dinamica acoplamientosI I I kg m kg m kg m= + = ⋅ + ⋅ = ⋅
B.3.1.2 Embrague electromagnético que protege la entrada de rotación
(Modelo 546.31.2.4)
Inercia del rotor rotorI : 20.0112kg m⋅
Inercia de la armadura armaduraI : 20.0128kg m⋅
Momento de inercia total:
2 2 2_1 0.0112 0.0128 0.0240embrague rotor armaduraI I I kg m kg m kg m= + = ⋅ + ⋅ = ⋅
B.3.1.3 Embragues electromagnéticos que protegen la entrada de momento
(Modelo 543.33.2.4)
Inercia del rotor rotorI : 20.1020kg m⋅
Inercia de la armadura armaduraI : 20.0860kg m⋅
Momento de inercia total:
2 2 2_ 2 0.1020 0.0860 0.1880embrague rotor armaduraI I I kg m kg m kg m= + = ⋅ + ⋅ = ⋅
Pág. 22 Anexo
B.3.2 Elementos de los que se calcula el momento de inercia
B.3.2.1 Elementos cilíndricos
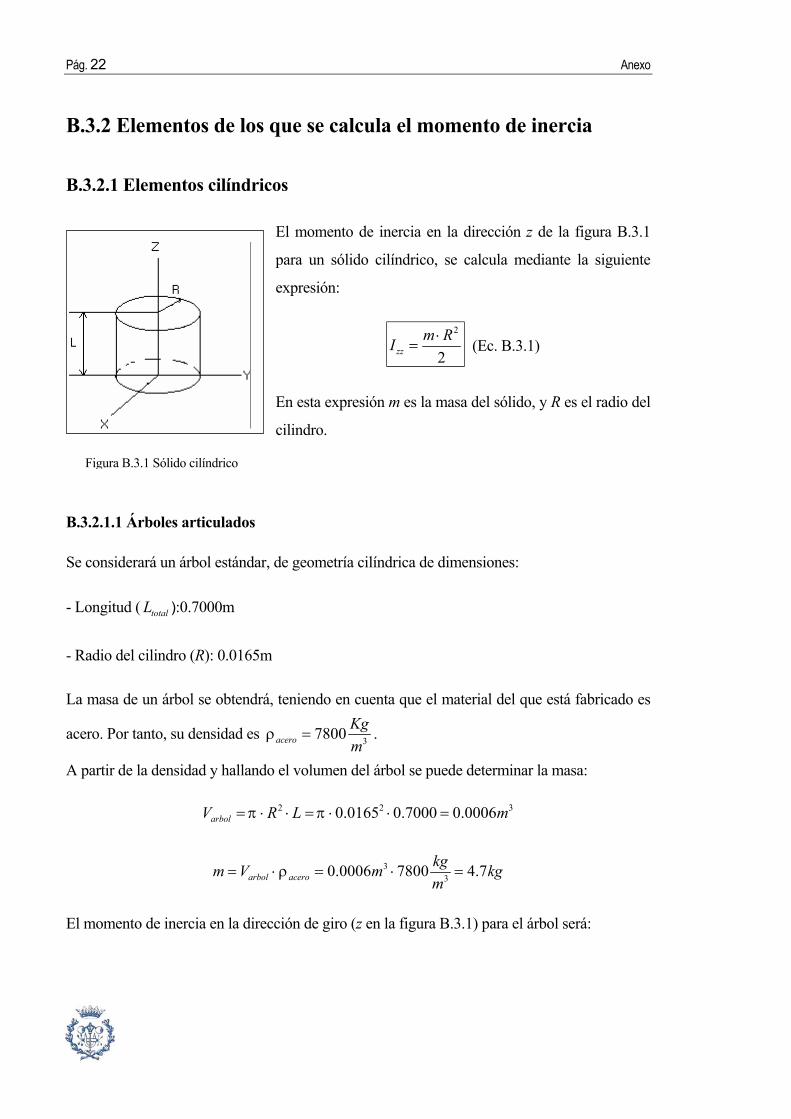
El momento de inercia en la dirección z de la figura B.3.1
para un sólido cilíndrico, se calcula mediante la siguiente
expresión:
2
2zzm RI ⋅
= (Ec. B.3.1)
En esta expresión m es la masa del sólido, y R es el radio del
cilindro.
B.3.2.1.1 Árboles articulados
Se considerará un árbol estándar, de geometría cilíndrica de dimensiones:
- Longitud ( totalL ):0.7000m
- Radio del cilindro (R): 0.0165m
La masa de un árbol se obtendrá, teniendo en cuenta que el material del que está fabricado es
acero. Por tanto, su densidad es 37800aceroKgm
ρ = .
A partir de la densidad y hallando el volumen del árbol se puede determinar la masa:
2 2 30.0165 0.7000 0.0006arbolV R L mπ π= ⋅ ⋅ = ⋅ ⋅ =
330.0006 7800 4.7arbol acero
kgm V m kgm
ρ= ⋅ = ⋅ =
El momento de inercia en la dirección de giro (z en la figura B.3.1) para el árbol será:
Figura B.3.1 Sólido cilíndrico

Anexo Pág. 23
2 224.7 (0.0165 ) 0.0006
2 2zzm R kg mI kg m⋅ ⋅
= = = ⋅
B.3.2.1.2 Árboles solidarios a los actuadores
Considerando que también están fabricados de acero, se siguen los mismos pasos que en el
apartado anterior.
Las dimensiones pueden comprobarse en el plano 11 del anexo C, y son las siguientes:
- Longitud ( totalL ): 0.725m
- Radio del cilindro ( R ): se calcula un radio promedio y resulta 28.6mm
30 110 32.5 35.5 37.5 10 32.5 48.5 27.5 521 28.6725
i imedio
total
R LR mm
L⋅ ⋅ + ⋅ + ⋅ + ⋅ + ⋅
= = =∑
La masa de un árbol se obtendrá, teniendo en cuenta que el material del que están fabricados
es acero. Por tanto, su densidad es 37800aceroKgm
ρ = .
A partir de la densidad y hallando el volumen del árbol, se puede determinar la masa,
2 2 30.0286 0.7250 0.0018ejeV R L mπ π= ⋅ ⋅ = ⋅ ⋅ =
330.0018 7800 14.5eje acero
kgm V m kgm
ρ= ⋅ = ⋅ =
El momento de inercia en la dirección de giro (z en la figura B.3.1) para árbol será:
2 2214.5 (0.0286 ) 0.0059
2 2zzm R kg mI kg m⋅ ⋅
= = = ⋅

Pág. 24 Anexo
B.3.2.1.3 Árbol de accionamiento
Siguiendo los mismos pasos que en los apartados anteriores, se calcula el momento inercia de
este elemento.
Las dimensiones pueden comprobarse en el plano 10 del anexo C, y son las siguientes:
- Longitud ( totalL ): 0.5630m
- Radio del cilindro ( R ): se calcula un radio promedio y resulta 37.4mm
37.5 108 45 120 37.5 145 32.5 190 37.4563
i imedio
total
R LR mm
L⋅ ⋅ + ⋅ + ⋅ + ⋅
= = =∑
La masa de un árbol se obtendrá, teniendo en cuenta que el material del que están fabricados
es acero. Por tanto, su densidad es 37800aceroKgm
ρ = .
A partir de la densidad y hallando el volumen del árbol, se puede determinar la masa:
2 2 30.0374 0.5630 0.0025ejeV R L mπ π= ⋅ ⋅ = ⋅ ⋅ =
330.0025 7800 19.6eje acero
kgm V m kgm
ρ= ⋅ = ⋅ =
El momento de inercia en la dirección de giro (z en la figura B.3.1) para el árbol será:
2 2219.6 (0.0400 ) 0.0150
2 2zzm R kg mI kg m⋅ ⋅
= = = ⋅
B.3.2.1.4 Árbol de unión de los especimenes
Siguiendo los mismos pasos que en los apartados anteriores, se calcula el momento de inercia
de este elemento.
Las dimensiones pueden comprobarse en el plano 19 del anexo C, y son las siguientes:

Anexo Pág. 25
- Longitud ( totalL ): 0.3600m
- Radio del cilindro ( R ): se calcula un radio promedio y resulta 34.9mm
32.5 93 37.5 174 32.5 93 34.9360
i imedio
total
R LR mm
L⋅ ⋅ + ⋅ + ⋅
= = =∑
La masa de un árbol se obtendrá, teniendo en cuenta que el material del que están fabricados
es acero. Por tanto, su densidad es 37800aceroKgm
ρ = .
A partir de la densidad y hallando el volumen del árbol, se puede determinar la masa:
2 2 30.0349 0.3600 0.0014ejeV R L mπ π= ⋅ ⋅ = ⋅ ⋅ =
330.0014 7800 10.7eje acero
kgm V m kgm
ρ= ⋅ = ⋅ =
El momento de inercia en la dirección de giro (z en la figura B.3.1) para el árbol será:
2 2210.7 (0.0349 ) 0.0065
2 2zzm R kg mI kg m⋅ ⋅
= = = ⋅
B.3.2.1.5 Árboles solidarios a los engranajes de fin de cadena
Se siguen los mismos pasos que en los apartados anteriores.
Las dimensiones pueden comprobarse en el plano 32 del anexo C, y son las siguientes:
-Longitud ( totalL ): 0.6000m
- Radio del cilindro (R): 0.0375m
2 2 30.0375 0.6000 0.0026ejeV R L mπ π= ⋅ ⋅ = ⋅ ⋅ =
Pág. 26 Anexo
330.0026 7800 20.7eje acero
kgm V m kgm
ρ= ⋅ = ⋅ =
2 2220.7 (0.0375 ) 0.0145
2 2zzm R kg mI kg m⋅ ⋅
= = = ⋅
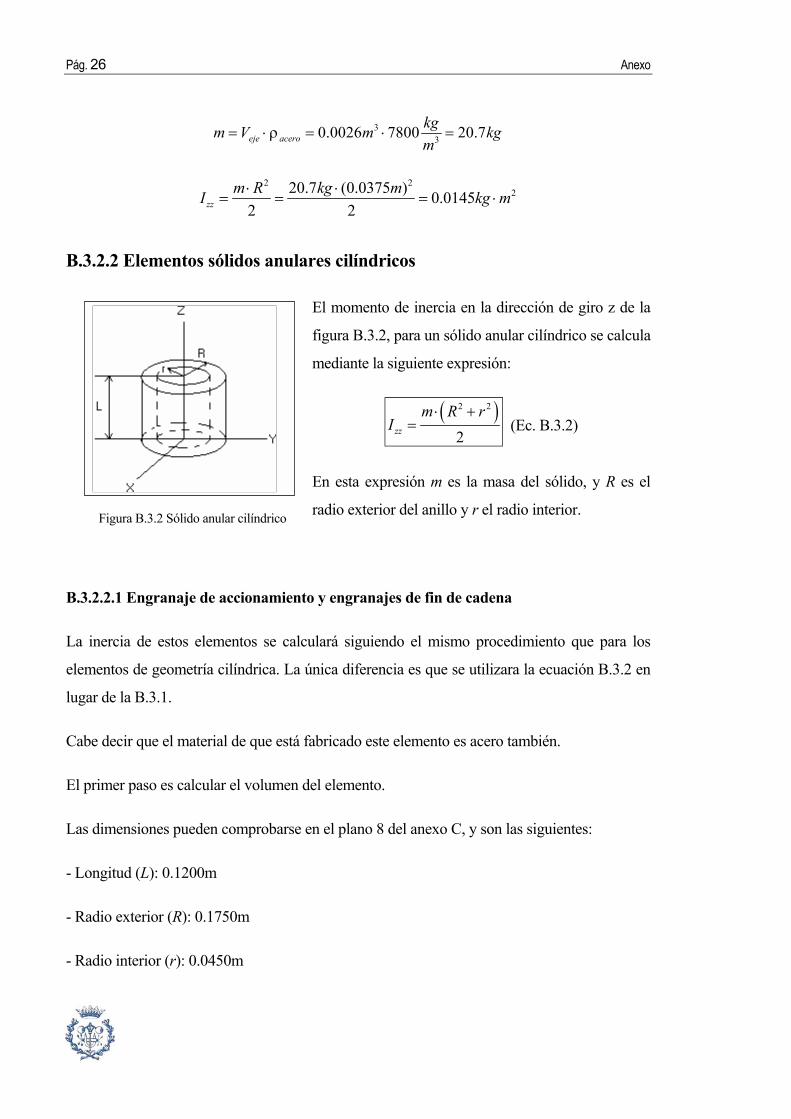
B.3.2.2 Elementos sólidos anulares cilíndricos
El momento de inercia en la dirección de giro z de la
figura B.3.2, para un sólido anular cilíndrico se calcula
mediante la siguiente expresión:
( )2 2
2zz
m R rI
⋅ += (Ec. B.3.2)
En esta expresión m es la masa del sólido, y R es el
radio exterior del anillo y r el radio interior.
B.3.2.2.1 Engranaje de accionamiento y engranajes de fin de cadena
La inercia de estos elementos se calculará siguiendo el mismo procedimiento que para los
elementos de geometría cilíndrica. La única diferencia es que se utilizara la ecuación B.3.2 en
lugar de la B.3.1.
Cabe decir que el material de que está fabricado este elemento es acero también.
El primer paso es calcular el volumen del elemento.
Las dimensiones pueden comprobarse en el plano 8 del anexo C, y son las siguientes:
- Longitud (L): 0.1200m
- Radio exterior (R): 0.1750m
- Radio interior (r): 0.0450m
Figura B.3.2 Sólido anular cilíndrico

Anexo Pág. 27
( ) ( )2 2 2 2 30.1750 0.0450 0.1200 0.0110engranajeV R r L mπ π= ⋅ − ⋅ = ⋅ − ⋅ =
330.0110 7800 84.1engranaje acero
kgm V m kgm
ρ= ⋅ = ⋅ =
El momento de inercia en la dirección de giro (z en la figura B.3.2) del engranaje será:
( )2 2 2 2284.1 (0.1750 0.0450 ) 1.3700
2 2zz
m R r kg m mI kg m⋅ + ⋅ +
= = = ⋅
B.3.2.2.2 Engranajes solidarios a los actuadotes rotativos
Este engranaje puede descomponerse en dos cuerpos anulares cilíndricos con las
características siguientes (pueden verse en el plano 9 del anexo C):
- Longitud ( 1L ): 0.1200m
- Radio exterior ( 1R ): 0.1750m
- Radio interior ( 1r ): 0.0325m
( ) ( )2 2 2 2 31
0.1750 0.0325 0.1200 0.0110engranajeV R r L mπ π= ⋅ − ⋅ = ⋅ − ⋅ =
31 30.0110 7800 84.1engranaje acero
kgm V m kgm
ρ= ⋅ = ⋅ =
( )2 2 2 22
184.1 (0.1750 0.0325 ) 1.3300
2 2zz
m R r kg m mI kg m⋅ + ⋅ +
= = = ⋅
- Longitud ( 2L ): 0.2300m
- Radio exterior ( 2R ): 0.0625m
- Radio interior ( 2r ): 0.0325m
( ) ( )2 2 2 2 32
0.0625 0.0325 0.2300 0.0020engranajeV R r L mπ π= ⋅ − ⋅ = ⋅ − ⋅ =

Pág. 28 Anexo
32 30.0020 7800 16.1engranaje acero
kgm V m kgm
ρ= ⋅ = ⋅ =
( )2 2 2 22
216.1 (0.0625 0.0325 ) 0.0400
2 2zz
m R r kg m mI kg m⋅ + ⋅ +
= = = ⋅
El momento de inercia total del engranaje solidario al actuador es:
2 2 21 2 1.3300 0.0400 1.3700
totalzz zz zzI I I kg m kg m kg m= + = ⋅ + ⋅ = ⋅
Anexo Pág. 29
B.4 MOMENTO DE ACCIONAMIENTO NECESARIO
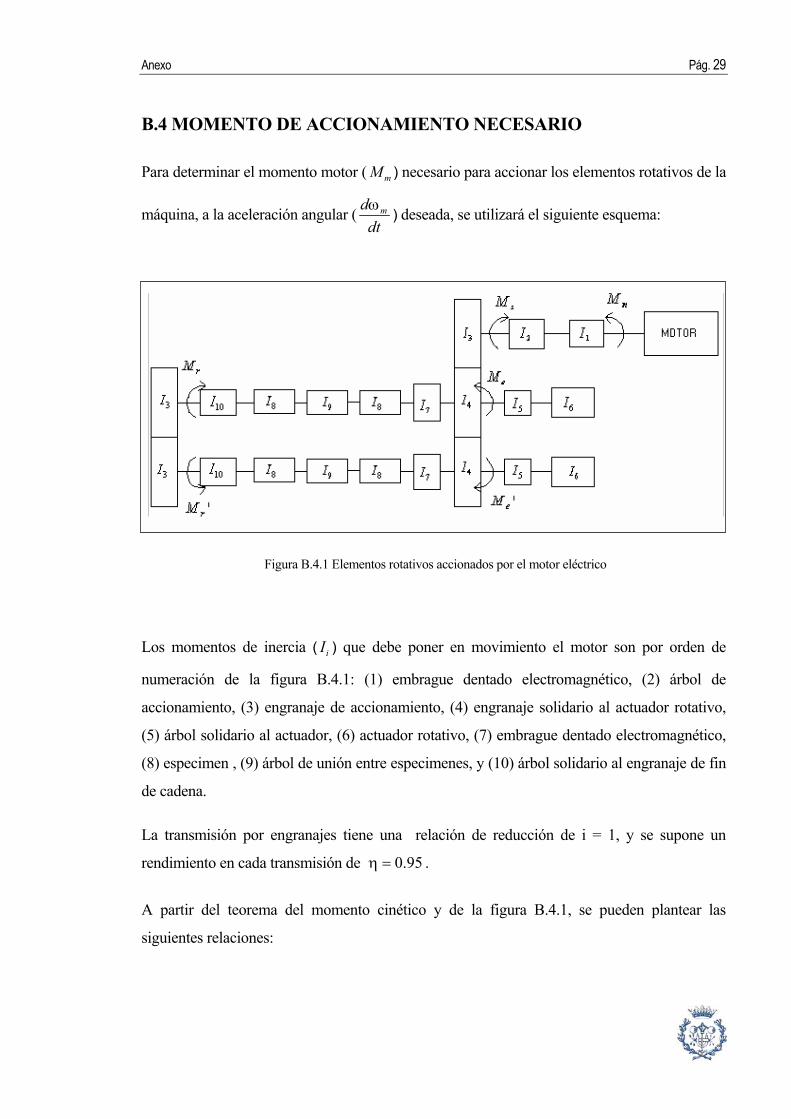
Para determinar el momento motor ( mM ) necesario para accionar los elementos rotativos de la
máquina, a la aceleración angular ( mddtω
) deseada, se utilizará el siguiente esquema:
Los momentos de inercia ( iI ) que debe poner en movimiento el motor son por orden de
numeración de la figura B.4.1: (1) embrague dentado electromagnético, (2) árbol de
accionamiento, (3) engranaje de accionamiento, (4) engranaje solidario al actuador rotativo,
(5) árbol solidario al actuador, (6) actuador rotativo, (7) embrague dentado electromagnético,
(8) especimen , (9) árbol de unión entre especimenes, y (10) árbol solidario al engranaje de fin
de cadena.
La transmisión por engranajes tiene una relación de reducción de i = 1, y se supone un
rendimiento en cada transmisión de 0.95η = .
A partir del teorema del momento cinético y de la figura B.4.1, se pueden plantear las
siguientes relaciones:
Figura B.4.1 Elementos rotativos accionados por el motor eléctrico

Pág. 30 Anexo
1 2 3
3 4 5 6 7 8 9
'' ' ' 3 4 5 6 7 8 9
( ) ( )
( ) ( 2 )
( ) ( 2 )
mm m s
ee e r
rr r e
dM M I I Idt
dM M I I I I I I IdtdM M I I I I I I Idt
ωω
ωω
ωω
− = + + ⋅
− = + + + + + ⋅ + ⋅
− = + + + + + ⋅ + ⋅
Sabiendo además que '
1m e
e r
iω ωω ω
= = = , es
MMi η
=⋅
y que 'rr
MMi η
=⋅
, se puede llegar a la
siguiente expresión:
' 3 4 5 6 7 8 9 101 2 32 2 2
3 4 5 6 7 8 9 103 2
( 2 )( ) (( ) )
( 2 )
e mm m
m
M I I I I I I I I dM I I Ii i dt
I I I I I I I I di dt
ωω
η η
ωη
+ + + + + ⋅ + +− = + + + ⋅ +
⋅ ⋅
+ + + + + ⋅ + ++ ⋅
⋅
El par resistente ( 'eM ) originado por las resistencias pasivas, se puede considerar incluido
dentro del rendimiento de la transmisión. De esta manera ' 0eM Nm≈ .
Substituyendo los valores de los momentos de inercia (calculados en el apartado B.3), y la
aceleración angular máxima 232.4md raddt sω
= (determinada en el apartado 6.2.1.2 de la
memoria), se obtiene el momento motor ( )m mM ω necesario.
2 22 2 2
2 2 2 2 2
2 2 2 2
(1.3700 1.3700 )( ) ((0.0240 0.0150 1.3700 )0.95
(0.0059 0.2120 0.1880 2 0.0006 0.0065 )0.95
0.0145 (1.3700 1.3700 0.0059 00.95
m mkg m kg mM kg m kg m kg m
kg m kg m kg m kg m kg m
kg m kg m kg m kg m
ω⋅ + ⋅
= ⋅ + ⋅ + ⋅ + +
⋅ + ⋅ + ⋅ + ⋅ ⋅ + ⋅+ +
⋅ ⋅ + ⋅ + ⋅ ++ +
2
2
2 2 2 2
2 2
.2120 ))0.95
(0.1880 2 0.0006 0.0065 0.0145 )) 32.4 317.20.95
kg m
kg m kg m kg m kg m rad Nms
⋅
⋅ + ⋅ ⋅ + ⋅ + ⋅+ ⋅ =
Anexo Pág. 31
B.5 DIMENSIONAMIENTO DE LOS ENGRANAJES
B.5.1 Anteproyecto
En el dimensionamiento de los engranajes se sigue la metodología propuesta [Fernández Cels,
p.204].
El primer paso consiste en definir el tipo de transmisión.
El más adecuado en este caso es el tipo IV, según la clasificación propuesta [Fernández Cels,
p.208]. Este tipo es adecuado para mecanismos en general, choques moderados, factor de
seguridad normal y su dentado es helicoidal. Se prevé un funcionamiento continuo y se desea
una vida superior a 50000 horas.
El siguiente paso es determinar la velocidad tangencial periférica de funcionamiento tv .
De la misma forma que el par de torsión, la velocidad de funcionamiento del engranaje será
variable a lo largo del ensayo. Por este motivo se opta por estimar la velocidad media de
rotación del ensayo, a partir de las velocidades determinadas en el apartado B.2 de este anexo
y los porcentajes de utilización de cada marcha estimados en el apartado 2.3.2 de la memoria.
B.5.1.1 Velocidad media de rotación del engranaje
A partir de las velocidades de ensayo (determinadas en el apartado B.2), y de los porcentajes
de utilización de cada una de ellas (expuestos en el apartado 2.3.2 de la memoria), se procede
a calcular la velocidad media de rotación de los especimenes.
Por las características del banco de ensayo, la velocidad de rotación de los especimenes es la
misma que la de los engranajes.
En la tabla B.5.1 se presentan los valores de las velocidades de ensayo, junto con el porcentaje
de utilización de cada una de ellas.

Pág. 32 Anexo
Velocidad angular de ensayo iω (rad/s) % Utilización
37.0 1% 68.4 5% 111.4 27% 155.6 40% 194.1 27%
A partir de la información de la tabla B.5.1 se obtiene la velocidad media del ensayoω .
B.5.1.2 Velocidad tangencial periférica
Debido a las particularidades del montaje de los engranajes en el banco, el diámetro primitivo
o de funcionamiento 'd debe ser de aproximadamente 350mm. Con este diámetro primitivo se
garantiza la suficiente separación, para el correcto montaje y funcionamiento de actuadores y
embragues electromagnéticos.
'
2ensayo
t
dv
ω ⋅= (Ec. B.5.1)
Utilizando la expresión B.5.1 se obtiene la velocidad tangencial periférica tv :
3148.5 350 1025.9
2t
rad mms mv s
−⋅ ⋅= =
(37.0 0.01) (68.4 0.05) (111.4 0.27)
(155.6 0.4) (194.1 0.27) 148.5
rad rad rads s s
rad rad rads s s
ω = ⋅ + ⋅ + ⋅ +
+ ⋅ + ⋅ =
Tabla B.5.1 Velocidades angulares de ensayo y porcentaje
de utilización de cada una de ellas

Anexo Pág. 33
B.5.1.3 Determinación de admK
Para el valor de la velocidad tangencial periférica obtenido (correspondiente al intervalo
15 ms < tv < 30 m
s de) se sugiere [Fernández Cels, p.208] el valor de 21.50admNK
mm= , y
la tensión admisible para el material seleccionado es d 245admN
mmσ = .
B.5.1.4 Diámetro primitivo o de funcionamiento mínimo
Se calculará mediante la siguiente expresión [Fernández Cels, p.205]:
'
3
'
2000 1
( )t
adm
M id b iKd
⋅ +≥ ⋅
⋅ (Ec. B.5.2)
tM es el par que debe transmitir el engranaje. Su valor depende de los actuadotes rotativos
que, tal y como se puede comprobar en el apartado 6.2.2.3 de la memoria, son capaces de
producir 2000Nm como máximo.
La relación '
bd
puede obtenerse de forma gráfica [Fernández Cels, p.205] a partir de la
relación de transmisión i = 1 (por necesidades del funcionamiento de la máquina) y del tipo de
transmisión se obtiene ' 0.5bd
≈ .
Substituyendo en la expresión B.5.2 los valores anteriores se obtiene el siguiente valor:
'
3 3
' 2
2000 1 2000 2000 1 1 220.11( ) 0.5 1.50
t
adm
M i Nmd mmb NiKd mm
⋅ + ⋅ +≥ ⋅ = ⋅ =
⋅ ⋅

Pág. 34 Anexo
B.5.1.5 Determinación del módulo ( 0m ) mínimo
El módulo mínimo se obtiene mediante la siguiente expresión [Fernández Cels, p.206]:
0 '
2000 t
adm
Mmb d σ
⋅≥
⋅ ⋅ (Ec. B.5.3)
En el apartado 6.3.1 de la memoria se han justificado los valores de la anchura del diente
b = 120mm, tensión admisible del material admσ = 245 Nmm
, y diámetro primitivo
' 350d mm= .
Substituyendo estos valores en la expresión anterior B.5.3 se obtiene el modulo mínimo:
0 '
2
2000 2000 2000 2.6120 350 45
t
adm
M Nmm Nb d mm mmmm
σ⋅ ⋅
≥ = =⋅ ⋅ ⋅ ⋅
B.5.2 Parámetros de generación
Los parámetros de generación definidos en el apartado 6.3.1.5.1 de la memoria son los
siguientes:
- Anchura del diente b = 120mm
- Modulo mínimo 0m = 6
-Número de dientes z = 55
- Ángulo de presión normal 0 18.00ºα =
- Angulo de inclinación 0β = 16.80º
- Desplazamiento total de perfil 1 2x x+∑ = 0.8mm

Anexo Pág. 35
A partir de los valores definidos se pueden obtener [Riba, 2000, p.89] los siguientes
parámetros de generación:
- Ángulo de presión tangencial ( tα )
0
0
tan tan18.00ºtancos cos16.80ºt
αα
β= =
De la anterior expresión se halla = 18.75ºtα
- Ángulo de inclinación sobre el cilindro base ( bβ )
0tan tan cos tan16.80º cos18.75º
b tβ β α= ⋅ = ⋅
De la anterior expresión se halla 15.95º bβ =
- Diámetro de generación ( 0d )
00
0
6 55 344.7cos cos16.80ºm zd mm
β⋅ ⋅
= = =
B.5.3 Parámetros de definición
A partir de los valores definidos se pueden obtener [Riba, 2000, p.89] los siguientes
parámetros de definición:
- Diámetro de base ( bd )
0
0
cos 55 6 cos18.75º 326.4cos cos16.80º
tb
z md mmαβ
⋅ ⋅ ⋅ ⋅= = =

Pág. 36 Anexo
- Paso de base transversal ( btp )
0
0
cos 6 cos18.75º 18.6cos cos16.80º
tbt
mp mmπ α πβ
⋅ ⋅ ⋅ ⋅= = =
- Grosor de base transversal ( bts )
0
00
( )2 cos 2 sin
cos
t
bt t
z Ev ms x
πα
α αβ
+ ⋅ ⋅ = ⋅ + ⋅ ⋅ =
55 (18.75º ) 62 cos18.75º 2 0.4 sin18.00º 13.5
cos16.80º
Evmm
π + ⋅ ⋅ = ⋅ + ⋅ ⋅ =
- Diámetro de cabeza ( ad )
00
552 (1 ) 2 (1 0.4) 6 361.5cos cos16.80ºa
zd x m mmβ
≤ + ⋅ + ⋅ = + ⋅ + ⋅ =
- Diámetro de pie ( fd )
00
552 (1.25 ) 2 (1.25 0,4) 6 334.5cos cos16.80ºf
zd x m mmβ
= − ⋅ − ⋅ = − ⋅ − ⋅ =
- Diámetro límite de evolvente ( invd )
2
0cos1 tan (4 (1 )sin 2inv t b
t
d x dz
βα
α
= + − ⋅ − ⋅ ⋅ = ⋅
2cos16.80º1 tan18.75º (4 (1 0.4) 326.4 338.7
55 sin(2 18.75º )mm mm
= + − ⋅ − ⋅ ⋅ = ⋅ ⋅

Anexo Pág. 37
B.5.4 Parámetros de funcionamiento
A partir de los valores definidos se pueden obtener [Riba, 2000, p.89] los siguientes
parámetros de funcionamiento:
- Ángulo de funcionamiento ( 'tα )
' 1 2
1 2
2 ( ) 2 (0.8)( ) ( ) tan (18.75º ) tan18.75º 0.01714( ) (55 55)
t t tx xEv Ev Ev
z zα α α
⋅ + ⋅= + ⋅ = + ⋅ =
+ +
Interpolando en las tablas de la función evolvente, se obtiene 'tα = 21.13º.
- Ángulo de inclinación sobre el cilindro primitivo de funcionamiento ( 'β )
''
tan tan15.95ºtancos cos 21.13º
b
t
ββ
α= =
De la anterior expresión se halla 'β = 17.04º
- Diámetro de funcionamiento ( 'd )
' 0'
0
cos 55 6 cos18.75º 350cos cos cos16.80º cos 21.13º
t
t
z md mmαβ α
⋅ ⋅= ⋅ = ⋅ =
- Diámetro activo de pie ( Ad )
22
'1 (1 ) tan 1atA b
b
dd i i dd
α = + + − ⋅ − ⋅ =
22361.51 (1 1) tan 21.13º 1 1 326.4 340.5
326.4mm mm
= + + − ⋅ − ⋅ =
- Distancia de funcionamiento ( 'a )
' '1 2 350 350' 350
2 2d da mm+ +
= = =
Pág. 38 Anexo
- Recubrimiento frontal ( αε )
2 2' '1 2
1 21 2
1 1 tan 1 tan2
a a
b b
d dz zd dαε α α
π
= ⋅ ⋅ − − + ⋅ − −
2 2'2 2 361.51 tan 55 1 tan 21.13º 1.6
2 2 326.4a
b
dzdαε α
π π
= ⋅ ⋅ − − = ⋅ ⋅ − − =
Puesto que en este caso rueda y piñón son iguales,
- Recubrimiento helicoidal ( βε )
0sin 120 sin16.80º 1.86o
bmββ
επ π⋅ ⋅
= = =⋅ ⋅
- Juego de fondo (c)
( ) ( )' 361.5 334.5350 2
2 2a fd d
c a mm+ +
= − = − =
B.5.5 Condiciones de engrane
B.5.5.1 Recubrimiento mínimo
La continuidad del engrane es un aspecto de vital importancia, ya que se pretende que la
velocidad de los engranajes, y el par transmitido, sean lo más uniformes posible a lo largo del
tiempo de funcionamiento.
El parámetro que define el correcto funcionamiento de este aspecto es el recubrimiento, y para
los engranajes cilíndricos rectos se recomienda [Riba, 2000, p.56] que αε se sitúe entre 1.4-
1.8.
Anexo Pág. 39
Anteriormente se ha calculado éste valor, para el engranaje que se esta dimensionando, y
resultaba αε = 1.6, por lo que estaría dentro de lo recomendado.
Además, cabe decir que este engranaje es dentado helicoidal, y por este motivo el
recubrimiento mejora ostensiblemente (se le añade un factor adicional llamado recubrimiento
helicoidal βε ).
A partir de lo visto, se puede concluir que, en este caso, la continuidad del engrane será
correcta.
B.5.5.2 Interferencia de funcionamiento
Entre el extremo superior del flanco del diente de una de las ruedas, y la zona del pie del
diente de la rueda contraria puede existir una interferencia de funcionamiento.
Esto se evita si el diámetro activo de pie Ad , de una rueda es igual o superior a su diámetro
límite de evolvente invd [Riba, 2000, p.56]. Es decir A invd d≥ .
Para estos engranajes se cumple esta condición, ya que si se comparan ambos valores
(definidos anteriormente), 340.5mm≥ 338.7mm.
B.5.5.3 Juego de fondo mínimo
La distancia entre el diámetro de cabeza de una rueda y el diámetro pie de la contraria, debe
tener un juego c, suficiente.
Para cumplir esta condición '02
a fd dc a c
+= − ≥ , dónde 0 00.25c m= ⋅ [Riba, 2000, p.58].
En este caso c = 2 y 0c = 1.5, por lo que se cumple este criterio.

Pág. 40 Anexo
Anexo Pág. 41
B.6 DETERMINACIÓN DE LAS CARACTERÍSTICAS DE
FUNCIONAMIENTO DEL ACTUADOR ROTATIVO
B.6.1 Cálculo del caudal hidráulico mínimo necesario
A continuación se determina el caudal mínimo necesario, que satisface las condiciones de
funcionamiento que demanda el ensayo. Una vez determinado este caudal, podrá decidirse qué
modelo de servo-válvula es el más adecuado.
Las características del actuador MTS-217, determinadas en el apartado 6.2.2 de la memoria
son:
El caudal necesario (Q) para una aplicación determinada, se obtiene mediante la expresión 6.5
de la memoria.
[ ] [ ]3 3
max2m mQ rad f Hzs radπ γ θ = ⋅ ⋅ ⋅
Como se puede observar, el caudal necesario depende de:
- maxθ máxima amplitud del desplazamiento angular del rotor del actuador
- f frecuencia de variación del desplazamiento angular.
B.6.2 Desplazamiento angular máximo de la aplicación ( maxθ )
El desplazamiento angular del rotor del actuador está limitado a 50º en cada sentido.
Modelo Ωestator (rpm) T (Nm) Γ (m³/rad) θ(rad)
MTS 217 2000-100 5000 2000± 42.04 10−⋅ 50º±
Pág. 42 Anexo
Su valor máximo en una aplicación concreta, se obtiene a través de la siguiente expresión (6.4
de la memoria):
[ ] [ ]max
M Nmrad
NmK radθ
θ =
El momento máximo (M) aplicado por el actuador es de 2000± Nm.
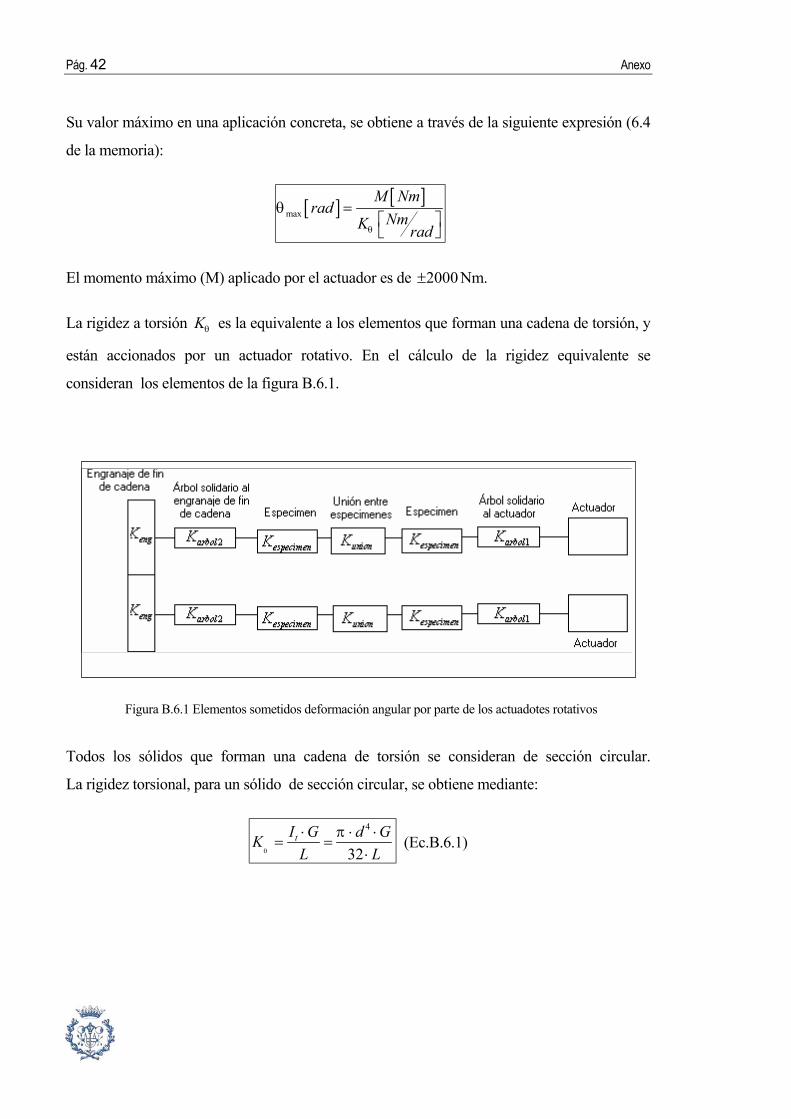
La rigidez a torsión Kθ es la equivalente a los elementos que forman una cadena de torsión, y
están accionados por un actuador rotativo. En el cálculo de la rigidez equivalente se
consideran los elementos de la figura B.6.1.
Todos los sólidos que forman una cadena de torsión se consideran de sección circular.
La rigidez torsional, para un sólido de sección circular, se obtiene mediante:
4
32tI G d GKL Lθ
π⋅ ⋅ ⋅= =
⋅ (Ec.B.6.1)
Figura B.6.1 Elementos sometidos deformación angular por parte de los actuadotes rotativos

Anexo Pág. 43
Se recuperan las dimensiones geométricas utilizadas en el apartado B.3.2 (la longitud L y el
diámetro medio d), y como módulo de rigidez del acero G se toma el valor de 280000 Nmm
.
Utilizando la expresión B.6.3 se obtienen las rigideces de cada sólido:
44 2
1
(57.2 ) 80000115967689.7
32 32 725arbol
Nmmd G NmmmKL mm rad
ππ ⋅ ⋅⋅ ⋅= = =
⋅ ⋅
44 2(33 ) 80000
13306033.632 32 700especimen
Nmmd G NmmmKL mm rad
ππ ⋅ ⋅⋅ ⋅= = =
⋅ ⋅
44 2(69.8 ) 80000
517857280.932 32 360union
Nmmd G NmmmKL mm rad
ππ ⋅ ⋅⋅ ⋅= = =
⋅ ⋅
44 2
2
(75 ) 80000414175781.3
32 32 600arbol
Nmmd G NmmmKL mm rad
ππ ⋅ ⋅⋅ ⋅= = =
⋅ ⋅
44 2(350 ) 80000
98215906250032 32 120engranaje
Nmmd G NmmmKL mm rad
ππ ⋅ ⋅⋅ ⋅= = =
⋅ ⋅
Se calcula la rigidez equivalente ( eqK ) para los elementos elásticos en serie
1 2
1 1 2 1 1 1 1 2115967689.7 13306033.6
1 1 1 1517857280.9 414175781.3 982159062500 6124548.9
eq arbol especimen union arbol engK K K K K K= + + + + = + +
+ + + =
El valor de la rigidez equivalente obtenido es 6124548.9eqNmKrad
= .

Pág. 44 Anexo
A partir de la expresión B.6.2, el desplazamiento angular máximo ( maxθ ), para la aplicación
requerida será:
[ ] [ ] 4max
2000 3.3 103062274
M Nm Nmrad radNmNmK rad radθ
θ −= = = ⋅
B.6.3 Frecuencia de aplicación del momento de torsión (f)
El actuador aplica sobre la cadena de torsión, ciclos de momento alternativo de 2000Nm± , a
una frecuencia f determinada, que puede controlarse. Esta frecuencia está acotada en un
intervalo, que depende del modelo de servo-válvula utilizado
Por otro lado, la frecuencia de aplicación estará limitada por la frecuencia crítica a torsión.
Aplicar el momento a esta frecuencia, ocasionaría que la cadena de torsión entrase en
resonancia.
Puesto que se desea evitar que esto último ocurra, se adoptará una solución de compromiso.
Ésta debe asegurar que la frecuencia de accionamiento está suficientemente lejos de la crítica,
y es óptima en cuanto a la duración del ensayo (a mayor frecuencia de accionamiento menor
duración del ensayo). Visto esto se opta por seguir el siguiente criterio:
15critica
aplicacionff =
La frecuencia crítica a torsión se obtiene mediante la siguiente expresión:
2
[ ]1[ ]2 [ ]critica
NmKradf Hz
I kg m
θ
π= ⋅
⋅ (Ec. B.6.2)

Anexo Pág. 45
Utilizando la rigidez a trosión de la cadena, calculada anteriormente, y las inercias I de la
cadena (determinadas en el apartado B.3), se obtiene la frecuencia crítica.
1 2
2
12
6124548.91 293.72 1.8
eqcritica
actuador arbol embrague especimen arbol engranaje
Kf
I I I I I I
Nmrad Hz
kg m
π
π
= ⋅ =+ + + + +
= ⋅ =⋅
Por tanto la frecuencia de excitación será 293.7 20
15aplicacionHzf Hz≈ ≈ .
Una vez determinados el desplazamiento angular máximo 4max 3.3 10 radθ −= ⋅ , y la frecuencia
de aplicación del par f = 10Hz, se puede calcular el caudal hidráulico Q necesario para la
aplicación, a partir de la expresión 6.5 de la memoria.
3 34 4 62 2.04 10 3.3 10 20 8.3 10m mQ rad Hzrad sπ − − −= ⋅ ⋅ ⋅ ⋅ ⋅ = ⋅
B.6.4 Selección de la servo-válvula
Tal y como se ha visto en el apartado 6.2.3 de la memoria, la servo-válvula es la encargada de
controlar el caudal de fluido, que entra en el interior del actuador rotativo.
A partir del caudal hidráulico necesario Q y de la frecuencia de aplicación del momento f se
selecciona el modelo de servo-válvula que cumpla:
- El caudal admisible por la servo-válvula sea mayor o igual que el caudal necesario en la
aplicación.
- El intervalo de frecuencias de trabajo, a caudal admisible máximo, de la servo-válvula
incluya el valor de 10Hz.
Pág. 46 Anexo
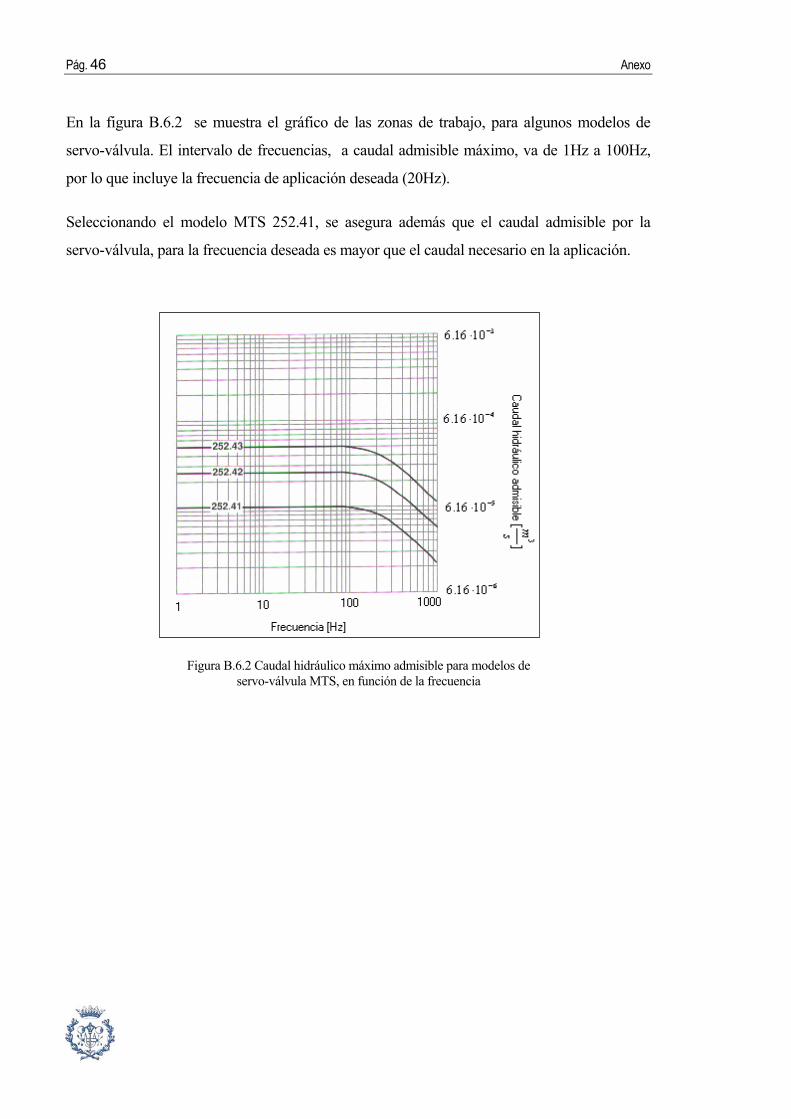
En la figura B.6.2 se muestra el gráfico de las zonas de trabajo, para algunos modelos de
servo-válvula. El intervalo de frecuencias, a caudal admisible máximo, va de 1Hz a 100Hz,
por lo que incluye la frecuencia de aplicación deseada (20Hz).
Seleccionando el modelo MTS 252.41, se asegura además que el caudal admisible por la
servo-válvula, para la frecuencia deseada es mayor que el caudal necesario en la aplicación.
Figura B.6.2 Caudal hidráulico máximo admisible para modelos de servo-válvula MTS, en función de la frecuencia

Anexo Pág. 47
B.7 DETERMINACIÓN DE LAS CARACTERÍSTICAS DE
FUNCIONAMIENTO DEL ACTUADOR LINEAL
B.7.1 Determinación de la carrera necesaria del vástago
El esquema de la figura B.7.1 (corresponde Al corte A-A’ del plano 3) muestra la disposición
de los especimenes (en rojo), en el banco de ensayo.
Puede comprobarse que los especimenes son de diferente longitud, y tal y como se ha
explicado en la memoria, tienen la translación de uno de sus extremos impedida. Este extremo
corresponde a la junta homocinética de tipo extremo móvil.
En su otro extremo, correspondiente a la junta de centro fijo, los especimenes están unidos
entre sí, mediante un elemento que se desplaza una determinada longitud x∆ en la dirección
indicada en la figura. Este movimiento está provocado por un actuador lineal.
Al desplazar el elemento que conecta los especimenes entre sí, la distancia entre los centros de
las juntas, de un mismo especimen, varía a medida que varía también el ánguloα .
Figura B.7.1 Esquema en planta del mecanismo de variación angular
Pág. 48 Anexo
Este movimiento puede realizarse debido a las características de las juntas, vistos en el anexo
A. En éste se explica que las juntas solidarias al elemento móvil permiten una desalineación
angular mayor que las otras. En cambio, las de extremo móvil permiten adaptar la distancia
entre centros (de las juntas), permitiendo al árbol que las une un determinado recorrido en su
interior (de la junta).
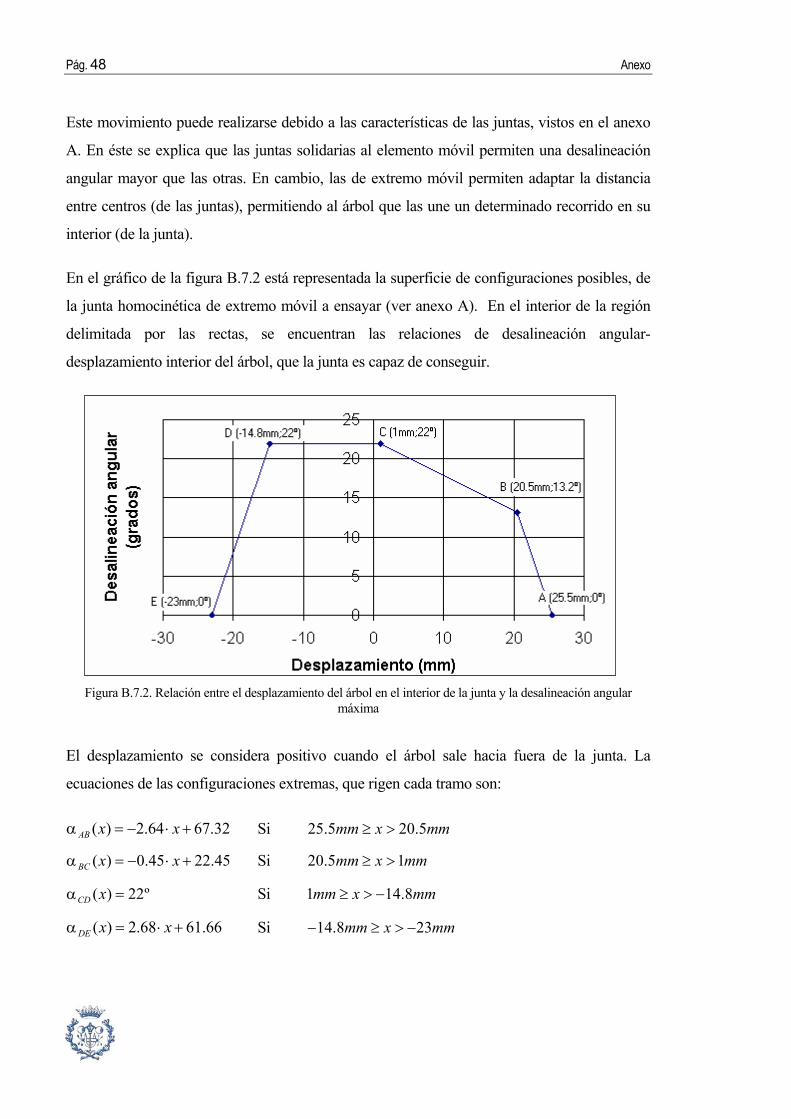
En el gráfico de la figura B.7.2 está representada la superficie de configuraciones posibles, de
la junta homocinética de extremo móvil a ensayar (ver anexo A). En el interior de la región
delimitada por las rectas, se encuentran las relaciones de desalineación angular-
desplazamiento interior del árbol, que la junta es capaz de conseguir.
El desplazamiento se considera positivo cuando el árbol sale hacia fuera de la junta. La
ecuaciones de las configuraciones extremas, que rigen cada tramo son:
( ) 2.64 67.32AB x xα = − ⋅ + Si 25.5 20.5mm x mm≥ >
( ) 0.45 22.45BC x xα = − ⋅ + Si 20.5 1mm x mm≥ >
( ) 22ºCD xα = Si 1 14.8mm x mm≥ > −
( ) 2.68 61.66DE x xα = ⋅ + Si 14.8 23mm x mm− ≥ > −
Figura B.7.2. Relación entre el desplazamiento del árbol en el interior de la junta y la desalineación angular máxima
Anexo Pág. 49
Por definición del ensayo (apartado 3.3.2 de la memoria), la amplitud máxima maxx∆ del
desplazamiento del actuador debe corresponder a la máxima que permita la el componente
ensayado. Por consiguiente es necesario determinar el maxx∆ de los especimenes que se
pretende ensayar.
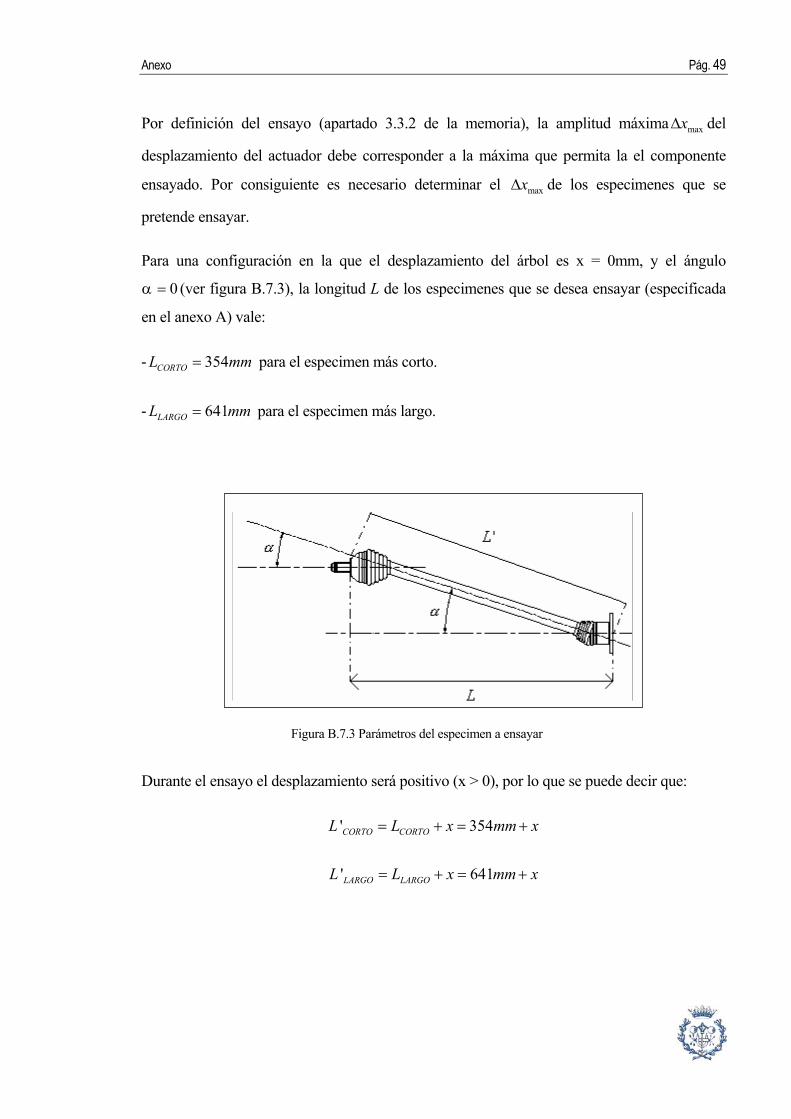
Para una configuración en la que el desplazamiento del árbol es x = 0mm, y el ángulo
0α = (ver figura B.7.3), la longitud L de los especimenes que se desea ensayar (especificada
en el anexo A) vale:
- 354CORTOL mm= para el especimen más corto.
- 641LARGOL mm= para el especimen más largo.
Durante el ensayo el desplazamiento será positivo (x > 0), por lo que se puede decir que:
' 354CORTO CORTOL L x mm x= + = +
' 641LARGO LARGOL L x mm x= + = +
Figura B.7.3 Parámetros del especimen a ensayar
Pág. 50 Anexo
La relación también se puede escribir así:
' cos (354 ) cosCORTO CORTOL mm x Lα α⋅ = + ⋅ =
' cos (641 ) cosLARGO LARGOL mm x Lα α⋅ = + ⋅ =
Realizando la hipótesis de que x < 20.5mm, y utilizando las expresiones (de las
configuraciones extremas) que acompañan a la figura B.7.2:
' cos (354 ) cos( 0.45 22.45) 354CORTO CORTOL mm x x Lα⋅ = + ⋅ − ⋅ + = =
' cos (641 ) cos( 0.45 22.45) 641LARGO CORTOL mm x x Lα⋅ = + ⋅ − ⋅ + = =
Los desplazamientos obtenidos son 14.3CORTOx mm= y 19.1LARGOx mm= , ambos inferiores a
25mm, por lo que la hipótesis formulada es correcta.
El desplazamiento que debe efectuar el vástago del actuador se puede hallar mediante:
' sinx L α∆ = ⋅
1 ' sin 90CORTOx L mmα∆ = ⋅ =
1 ' sin 157LARGOx L mmα∆ = ⋅ =
Puesto que ambos se han hallado a partir de una configuración extrema de la junta se debe
escoger el más restrictivo. Por tanto max 90x mm∆ = .
B.7.2 Determinación de la fuerza necesaria
Una vez determinada la carrera total necesaria del vástago, igual a 90mm, se procede a
determinar la fuerza necesaria para cumplir las condiciones del ensayo.
La carrera de 90mm es recorrido total, por lo que la amplitud del movimiento sinusoidal del
vástago será de la mitad, es decir max1 45x mm= .

Anexo Pág. 51
En el apartado 3.3.2 de la memoria, dónde se describe el ensayo se explicita que se debe
ensayar a dos amplitudes.
Una de ellas es max1x a 3Hz, y la segunda max1max 2
45 2.2520 20
x mmx mm= = a 30Hz.
A partir de las amplitudes máximas, y sabiendo que se trata de un movimiento de tipo
sinusoidal se pueden determinar las aceleraciones máximas. Estas aceleraciones son las
siguientes:
2max max
22max1
22max 2
(2 )
2.25 (2 30) 88.8
45 (2 3) 15.9
x x fmx mm s
mx mm s
π
π
π
= ⋅ ⋅
= ⋅ ⋅ =
= ⋅ ⋅ =
En el cálculo de la fuerza necesaria se utilizará el valor de max1x por ser el mayor.
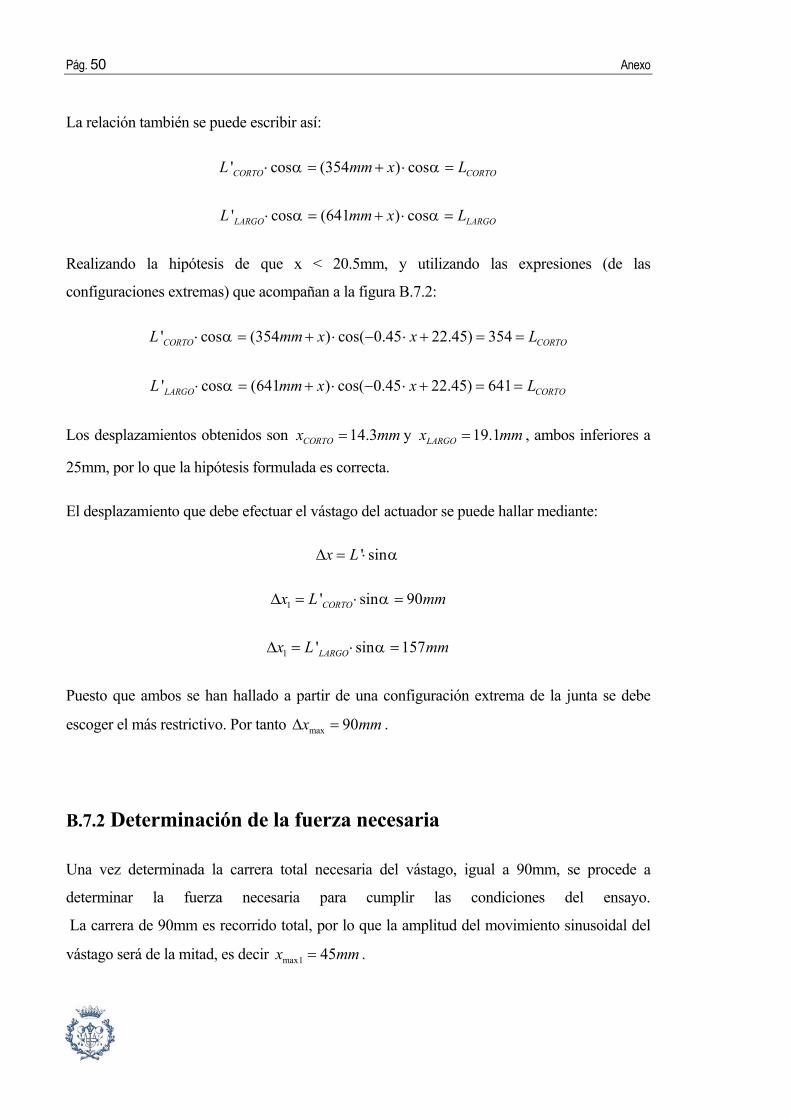
En la figura B.7.4 puede verse un esquema de los elementos solidarios al actuador lineal (de
base no desplazable). Se ha representado el peso de aquellos que son móviles en la dirección
del movimiento.
- 1m y 3m incluyen la masa de la carcasa (50kg aproximadamente), y la masa del árbol
solidario al especimen (10,7Kg). Por tanto 1 3 60.7m m kg= =
- 2m es la masa del árbol que une las dos carcasas, 2 4.5m kg=
- 4m es la masa del árbol guiado, 4 11m kg=
Considerando las masas como un sólido rígido sometido a una serie de fuerzas exteriores, se
puede escribir lo siguiente:
( )1 2 3 4 actuador Rm m m m x F F+ + + ⋅ = −
RF es la fuerza de rozamiento, originada por el contacto entre uno de los árboles y el tirante
con los cojinetes. Puede expresarse de la siguiente forma: RF m g µ= ⋅ ⋅
El coeficiente de fricción µ se estima en 0.03, según la curva de coeficiente de rozamiento –
número de revoluciones [Niemann, 1981, p.323].
Pág. 52 Anexo
Una vez conocidos todos los parámetros, aislando la fuerza del actuador se llega a:
( ) 2 21 2 3 4 136.9 88.8 136.9 9.81 0.03 12197actuador Rm mF m m m m x F kg Ns s= + + + ⋅ + = ⋅ + ⋅ ⋅ =
El actuador lineal escogido debe tener un vástago con una carrera igual o superior a 90mm, y
debe ser capaz de suministrar una fuerza, en la dirección del movimiento, de al menos
12197N.
B.7.3 Cálculo del caudal hidráulico mínimo necesario
Eel caudal necesario para conseguir un movimiento de tipo sinusoidal se ha definido en la
memora mediante la expresión 7.1:
321[ ] [ ] [ ] [ ]
4mQ x m S m f Hzs
= ⋅ ⋅ ⋅
La amplitud máxima necesaria se ha determinado, y es de 45mm a una frecuencia de 3Hz. La
sección S del émbolo, depende del modelo de actuador, y las características del escogido son:
Figura B.7.4 Elementos accionados por el actuador lineal
Anexo Pág. 53
Modelo Fuerza máxima (kN) 2[ ]S m [ ]x m∆ MTS 248.04 36 0.002 0.0101
Conocidos todos los parámetros, mediante la expresión 7.1 de la memoria se puede calcular el
caudal hidráulico necesario:
3 32 3 2 51 1[ ] [ ] [ ] [ ] 45 10 0.002 3 6.75 10
4 4m mQ x m S m f Hz m m Hzs s
− −= ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ ⋅ = ⋅
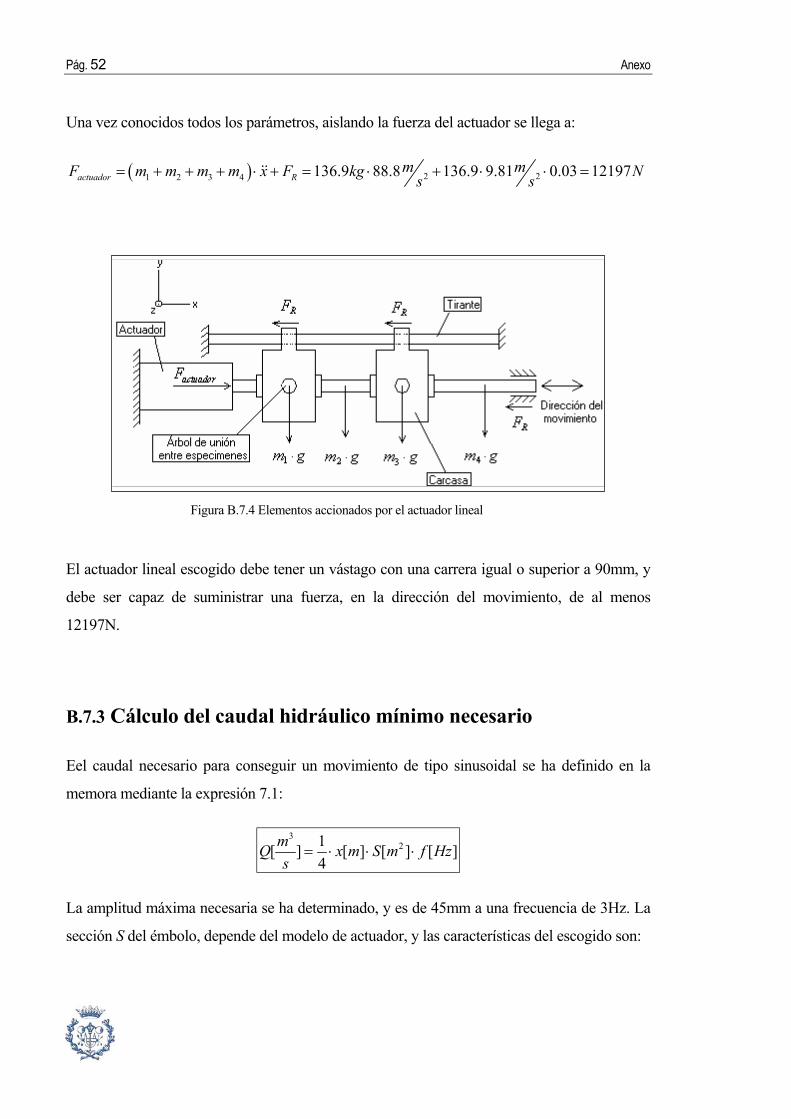
B.7.4 Selección de la servo-válvula
El modelo seleccionado es el MTS 252.42. Como puede verse en el gráfico de la figura B.7.5,
su caudal máximo admisible es de 3
41.54 10 ms
−⋅ , valor superior a los 3
56.75 10 ms
−⋅ .
El caudal admisible se mantiene constante las frecuencias que van a utilizarse en el ensayo,
que son de 3Hz y 30Hz.
Figura B.7.5 Caudal hidráulico máximo admisible para modelos de servo-válvula
MTS, en función de la frecuencia
Pág. 54 Anexo
Anexo Pág. 55
B.8 DIMENSIONAMIENTO DEL ÁRBOL SOLIDARIO AL
ACTUADOR
B.8.1 Determinación de las solicitaciones
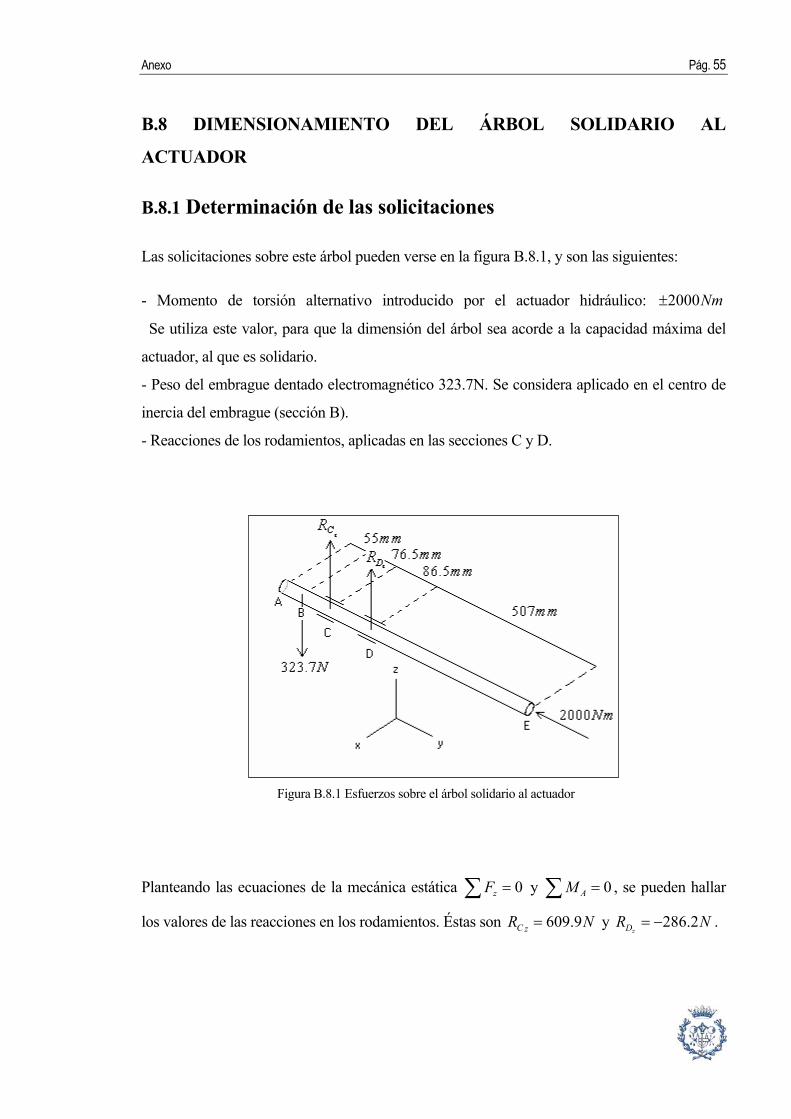
Las solicitaciones sobre este árbol pueden verse en la figura B.8.1, y son las siguientes:
- Momento de torsión alternativo introducido por el actuador hidráulico: 2000Nm±
Se utiliza este valor, para que la dimensión del árbol sea acorde a la capacidad máxima del
actuador, al que es solidario.
- Peso del embrague dentado electromagnético 323.7N. Se considera aplicado en el centro de
inercia del embrague (sección B).
- Reacciones de los rodamientos, aplicadas en las secciones C y D.
Planteando las ecuaciones de la mecánica estática 0zF =∑ y 0AM =∑ , se pueden hallar
los valores de las reacciones en los rodamientos. Éstas son 609.9C zR N= y 286.2zDR N= − .
Figura B.8.1 Esfuerzos sobre el árbol solidario al actuador

Pág. 56 Anexo
B.8.2 Diagramas de esfuerzos
Los esfuerzos a los que está sometido el árbol son los siguientes:
- Esfuerzo cortante en la dirección z ( ZT )
- Momento flector en la dirección x (XfM )
Escogiendo el punto B como y = 0mm, las ecuaciones son las siguientes:
( )0 ( )76.5 ( ) 323.7
( )76.5 ( )163 ( ) 323.7 609.9 ( 76.5)X
X
f
f
B mm y C mm M y y
C mm y D mm M y y y
≤ ≤ → = ⋅
≤ ≤ → = ⋅ − ⋅ −
-Momento torsor (YTM )
Anexo Pág. 57
Escogiendo el punto A como y = 0mm, las ecuaciones son las siguientes:
( )0 ( )725 ( ) 2000YTA mm y E mm M y Nm≤ ≤ → =
B.8.3 Cálculo del diámetro del árbol
Se dimensionará el árbol mediante el cálculo resistente práctico suponiendo el diámetro
constante.
Como puede comprobarse observando los diagramas, el momento a torsión que solicita al
árbol, es muy superior al momento flector (dos unidades de magnitud). Por este motivo se
decide dimensionar el árbol a torsión.
El material escogido para este componente es un acero de bonificación, de elevado límite
elástico, debido a la elevada carga que debe soportar. En concreto se trata de un acero
UNE F-1270 de límite elástico mR = 21200 Nmm .
Este acero es de gran templabilidad y buena tenacidad. Se comporta bien frente a choques y
esfuerzos de torsión, y suele utilizarse en piezas de grandes dimensiones, sometidas a gran
fatiga.
Como tensión admisible se considera la tensión a fatiga para vida infinita fS .Este límite
puede aproximarse al caso de torsión alternativa multiplicando el límite de rotura a tracción
del material mR , por 0.29 (0.5 y 0.58). Además debe tenerse en cuenta, un coeficiente de
seguridad sC que engloba los aspectos asociados al árbol (acabado superficial, concentración
de tensiones,…) que reducen la resistencia a fatiga.
La tensión tangencial admisible:
2
2
0.5 0.58 12000.5 0.58 1163
f madm
s s
NS R NmmC C mm
τ⋅ ⋅⋅ ⋅
= = = =

Pág. 58 Anexo
Considerando el árbol de diámetro constante, para un momento torsor tM , y una tensión
tangencial admisible del material admτ , el diámetro necesario se obtiene mediante:
316 t
adm
Mdπ τ
⋅≥
⋅ (Ec. B.8.1)
El diámetro mínimo a partir de la expresión B.8.1 es:
3
3
2
16 2000 10 44.4116
Nmmd mmNmm
π
⋅ ⋅≥ =
⋅
En las dimensiones finales del árbol (pueden comprobarse en el plano 11), el diámetro mínimo
es de 55mm. Este valor es superior al valor mínimo calculado.
Debe tenerse en cuenta que el valor calculado se ha obtenido, a partir de la capacidad máxima
del actuador hidráulico (2000Nm).
B.8.4 Cálculo de las tensiones
Una vez se tienen las características del árbol en detalle (plano 11), se procede a realizar el
cálculo de las tensiones que solicitan a la sección crítica.
La sección crítica es la sección D de la figura B.8.1, con un diámetro d = 55mm.
Los esfuerzos cortantes producen en la sección una distribución de tensiones tangenciales. El
valor máximo de esta tensión tangencial se calcula mediante la fórmula de Collignon (valor
del esfuerzo cortante máximo, en una sección circular):
1 2 2 2
4 4 4 286.2 0.2(55 )3 3 3
4 4
T T N Nd mmS mm
τπ π
= ⋅ = = =⋅ ⋅
Debido a su valor se considera despreciable el efecto de los esfuerzos cortantes.
Anexo Pág. 59
Además de un esfuerzo cortante, sobre la sección D actúa un momento torsor de 2000Nm.
Este momento origina una tensión tangencial alternativa, cuyo valor máximo puede obtenerse
a partir de la teoría de Coulomb:
3
2 3 3 2
2000 10 61.2(55 )
16 16
t t
t
M M Nmm Nd mmW mm
τπ π
⋅= = = =
⋅ ⋅
Se considera está tensión alternativa como la única que solicita a la sección D. Por lo tanto, se
debe comprobar la vida a fatiga del árbol.
B.8.5 Comprobación a fatiga
Para comprobar la vida a fatiga, se determinará el límite a fatiga del árbol fS , a partir de los
coeficientes de tipo de carga lk , de tamaño dk , de acabado superficial sk , de concentración
de tensiones fK , y del límite a fatiga de la probeta estándar ' fS .
El cálculo se realizará a partir de la siguiente expresión [Bigordà y Fenollosa, 1993, p.23]:
1 'f l d s ff
S k k k SK
= ⋅ ⋅ ⋅ ⋅ (Ec. B.8.2)
El coeficiente de tipo de carga lk para una solicitación a torsión, y para un acero vale 0.58.
El coeficiente que tiene en cuenta el efecto del tamaño dk , vale 0.75 ya que todas las
secciones del árbol tienen un diámetro superior a 50mm.
El coeficiente de acabado superficial sk , para un acero de 21200mNR
mm= con un acabado
superficial mecanizado, vale 0.675.

Pág. 60 Anexo
El coeficiente de concentración de tensiones fK se obtiene a partir del coeficiente de
concentración de tensiones teórico tK , y de la sensibilidad a la entalla q. La expresión que lo
determina es la siguiente [Bigordà y Fenollosa, 1993, p.34]:
1 ( 1)f tK q K= + ⋅ − (Ec. B.8.3)
Este caso se trata de un árbol de sección circular, con una ranura anular, sometido a torsión.
De la relación entre el radio de la entalla y el diámetro de la ranura se extrae, en la tabla
correspondiente el valor de tK = 1.8.
La sensibilidad a la entalla para el caso torsión, y acero templado es de q = 0.7.
A partir de los dos parámetros anteriores, y de la expresión B.8.3
1 0.7 (1.8 1) 1.56fK = + ⋅ − = .
El límite a fatiga de la probeta estándar para un acero de 21200mNR
mm= , y mecanizado, es
de 2' 425fNS
mm= .
Una vez determinados todos los parámetros, utilizando la expresión B.8.2 se determina el
límite a fatiga del árbol:
2 2
10.58 0.75 0.675 425 801.56f
N NSmm mm
= ⋅ ⋅ ⋅ ⋅ =
Puesto que la tensión tangencial es prácticamente alternativa pura, no será necesario
representar el diagrama de fatiga a torsión. Es suficiente con comprobar que la tensión
tangencial alternativa, que actúa sobre la sección menor del árbol, es inferior al límite de fatiga
estimado a fSτ < .
El coeficiente de seguridad admisible está comprendido entre 1,3 y 2 [Bigordà y Fenollosa,
1993, p.51]. En este caso su valor es:
2
2
801.3
60.1
fS
a
NS mmC N
mmτ
= = =
Anexo Pág. 61
B.9 DIMENSIONAMIENTO DEL ÁRBOL SOLIDARIO AL
ENGRANAJE DE FINAL DE CADENA
B.9.1 Determinación de las solicitaciones
Las solicitaciones sobre este árbol son las siguientes:
- Momento máximo transmitido procedente del actuador rotativo: 2000Nm.
Se utiliza este valor porque es el máximo momento que es capaz de de producir el actuador.
- El árbol es solidario a un engranaje cilíndrico de dentado helicoidal, que transmite el
momento ( tM ), de una cadena de torsión a la otra.
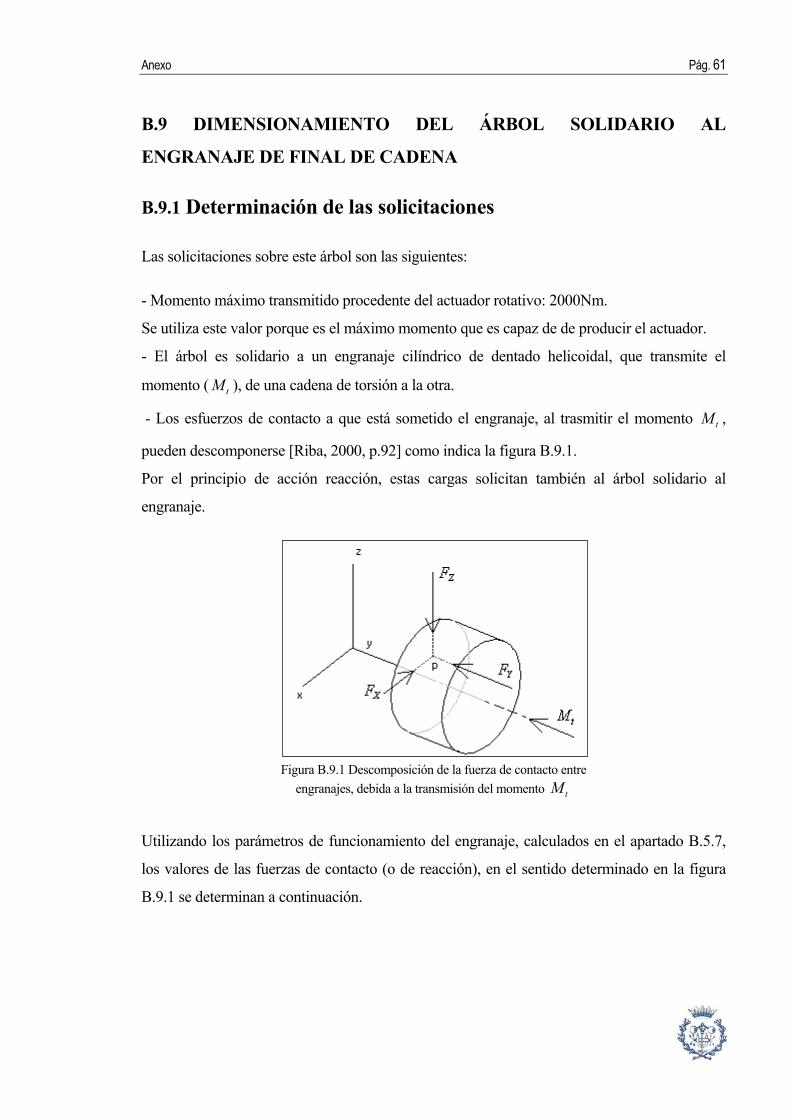
- Los esfuerzos de contacto a que está sometido el engranaje, al trasmitir el momento tM ,
pueden descomponerse [Riba, 2000, p.92] como indica la figura B.9.1.
Por el principio de acción reacción, estas cargas solicitan también al árbol solidario al
engranaje.
Utilizando los parámetros de funcionamiento del engranaje, calculados en el apartado B.5.7,
los valores de las fuerzas de contacto (o de reacción), en el sentido determinado en la figura
B.9.1 se determinan a continuación.
Figura B.9.1 Descomposición de la fuerza de contacto entre engranajes, debida a la transmisión del momento tM
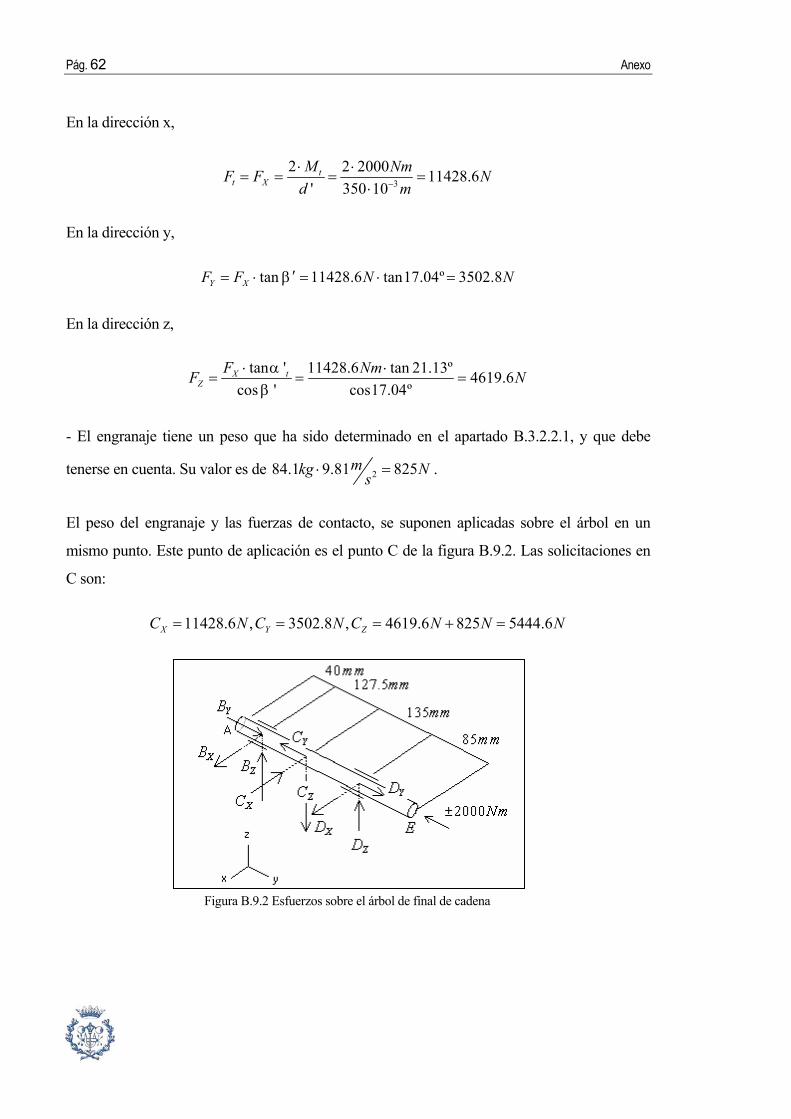
Pág. 62 Anexo
En la dirección x,
3
2 2 2000 11428.6' 350 10
tt X
M NmF F Nd m−
⋅ ⋅= = = =
⋅
En la dirección y,
tan 11428.6 tan17.04º 3502.8Y XF F N Nβ ′= ⋅ = ⋅ =
En la dirección z,
tan ' 11428.6 tan 21.13º 4619.6cos ' cos17.04º
X tZ
F NmF Nαβ
⋅ ⋅= = =
- El engranaje tiene un peso que ha sido determinado en el apartado B.3.2.2.1, y que debe
tenerse en cuenta. Su valor es de 284.1 9.81 825mkg Ns⋅ = .
El peso del engranaje y las fuerzas de contacto, se suponen aplicadas sobre el árbol en un
mismo punto. Este punto de aplicación es el punto C de la figura B.9.2. Las solicitaciones en
C son:
11428.6 , 3502.8 , 4619.6 825 5444.6X Y ZC N C N C N N N= = = + =
Figura B.9.2 Esfuerzos sobre el árbol de final de cadena
Anexo Pág. 63
Aplicando las ecuaciones de la estática, y resolviendo el sistema de ecuaciones que se deriva
de ellas, se obtiene:
- 5877.5XB N= y 2800ZB N= procedente del rodamiento de la sección B
- 5551.1XD N= y 2644.6ZD N= procedente del rodamiento de la sección D
- Uno de los dos rodamientos ( YB o YD ) absorbe la carga en dirección axial YC
B.9.2 Diagramas de esfuerzos
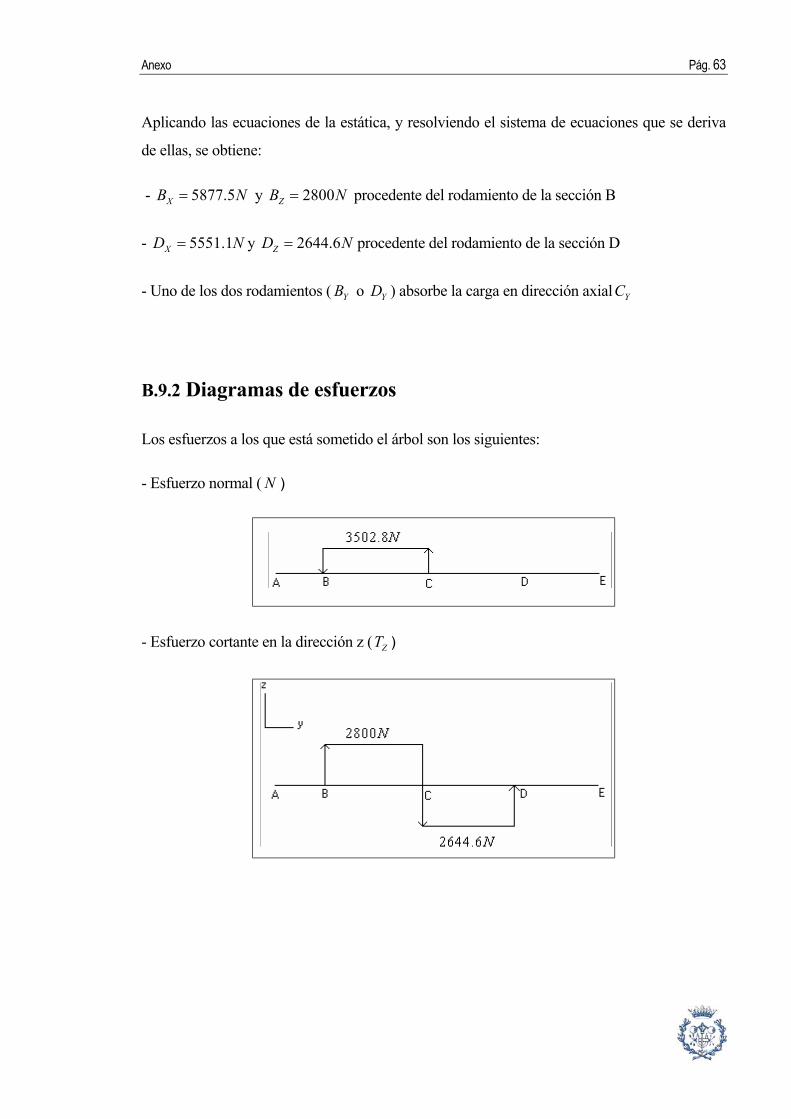
Los esfuerzos a los que está sometido el árbol son los siguientes:
- Esfuerzo normal ( N )
- Esfuerzo cortante en la dirección z ( ZT )
Pág. 64 Anexo
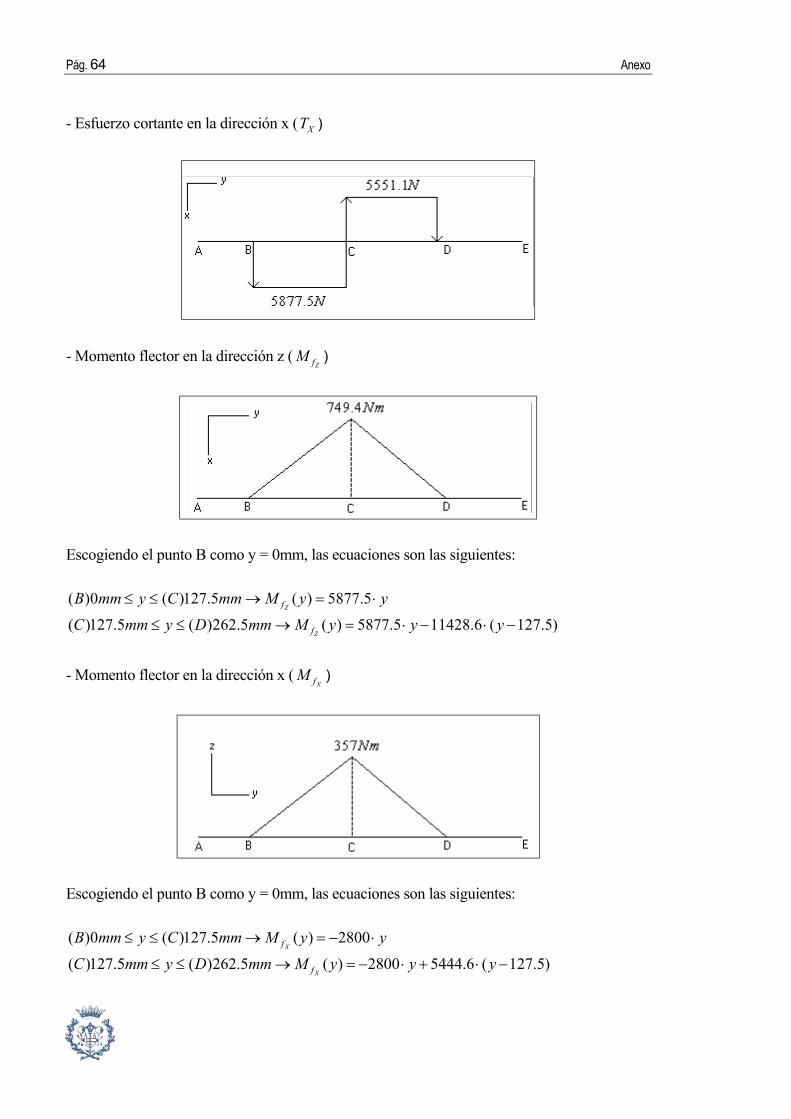
- Esfuerzo cortante en la dirección x ( XT )
- Momento flector en la dirección z (Zf
M )
Escogiendo el punto B como y = 0mm, las ecuaciones son las siguientes:
( )0 ( )127.5 ( ) 5877.5
( )127.5 ( )262.5 ( ) 5877.5 11428.6 ( 127.5)Z
Z
f
f
B mm y C mm M y y
C mm y D mm M y y y
≤ ≤ → = ⋅
≤ ≤ → = ⋅ − ⋅ −
- Momento flector en la dirección x (XfM )
Escogiendo el punto B como y = 0mm, las ecuaciones son las siguientes:
( )0 ( )127.5 ( ) 2800
( )127.5 ( )262.5 ( ) 2800 5444.6 ( 127.5)X
X
f
f
B mm y C mm M y y
C mm y D mm M y y y
≤ ≤ → = − ⋅
≤ ≤ → = − ⋅ + ⋅ −
Anexo Pág. 65
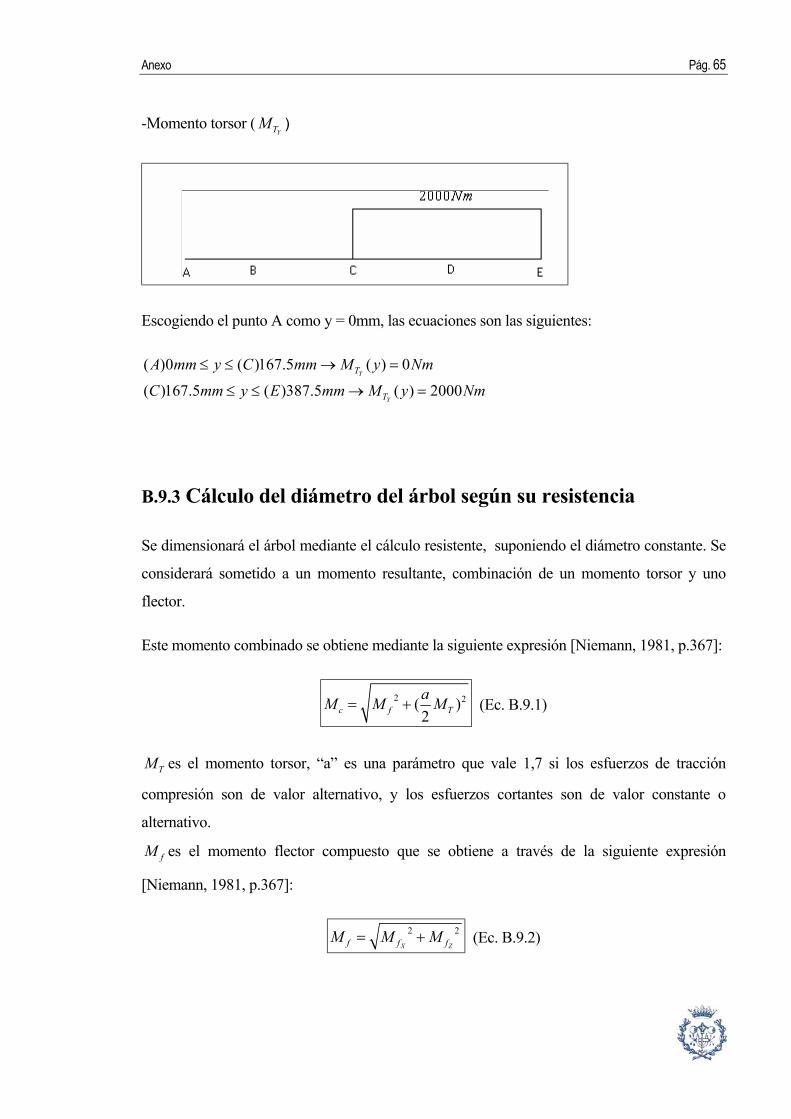
-Momento torsor (YTM )
Escogiendo el punto A como y = 0mm, las ecuaciones son las siguientes:
( )0 ( )167.5 ( ) 0
( )167.5 ( )387.5 ( ) 2000Y
Y
T
T
A mm y C mm M y Nm
C mm y E mm M y Nm
≤ ≤ → =
≤ ≤ → =
B.9.3 Cálculo del diámetro del árbol según su resistencia
Se dimensionará el árbol mediante el cálculo resistente, suponiendo el diámetro constante. Se
considerará sometido a un momento resultante, combinación de un momento torsor y uno
flector.
Este momento combinado se obtiene mediante la siguiente expresión [Niemann, 1981, p.367]:
2 2( )2c f TaM M M= + (Ec. B.9.1)
TM es el momento torsor, “a” es una parámetro que vale 1,7 si los esfuerzos de tracción
compresión son de valor alternativo, y los esfuerzos cortantes son de valor constante o
alternativo.
fM es el momento flector compuesto que se obtiene a través de la siguiente expresión
[Niemann, 1981, p.367]:
2 2X Zf f fM M M= + (Ec. B.9.2)

Pág. 66 Anexo
Observando los diagramas de esfuerzos del apartado B.9.2, se comprueba que la sección
crítica a flexión es la C. El momento flector combinado en esta sección, a partir de la
expresión B.9.2 es:
2 2357 749.4 829.7fM Nm= + =
Y el momento combinado total, a partir de la expresión B.9.1:
2 21.7829.7 ( 2000) 1891.72cM Nm= + =
A partir del momento combinado total, la tensión de tracción-compresión equivalente cσ (se
obtiene mediante la expresión B.9.3) debe ser igual o inferior a la tensión admisible admσ .
3
( )32
c cc adm
f
M MdW
σ σπ
= = ≤⋅
(Ec. B.9.3)
El material escogido para materializar este componente es un acero de cementación. En
concreto se trata de un acero UNE F-1250 de límite elástico mR = 2800 Nmm .
Este acero tiene una buena resistencia y tenacidad, además de una buena templablidad. Entre
los aceros de características elevadas es el más usado y el que se encuentra más fácilmente en
el mercado.
Como tensión admisible se considera la tensión a fatiga para vida infinita a flexión rotativa
fS . Este límite puede aproximarse multiplicando el límite de rotura a tracción del material
mR , por 0.5. Se tiene en cuenta además, un coeficiente de seguridad sC que engloba los
aspectos asociados al árbol (acabado superficial, concentración de tensiones,…), que reducen
la resistencia a fatiga.
Anexo Pág. 67
De esta manera, se obtiene la tensión tracción-compresión admisible:
2
2
0.5 8000.5 133.33
f madm
s s
NS R NmmC C mm
σ⋅⋅
= = = =
Aislando el diámetro de la expresión B.9.3 se obtiene como diámetro mínimo:
3
33
2
32 32 1891 10 52.5133.3
c
adm
M Nmd mmNmm
π σ π⋅
≥ ⋅ = ⋅ =
B.9.4 Cálculo del diámetro del árbol según su deformación
Este cálculo se realizará teniendo en cuenta las siguientes hipótesis:
- Se considera el diámetro del árbol constante
- Con el fin de garantizar unas buenas condiciones de engrane, la deformación máxima del
árbol en las secciones en contacto con el engranaje debe ser 0.15mm ( 0.15mmδ ≤ )
- Para simplificar se considera el caso de viga libremente apoyada, sometida a una única carga
(contacto entre engranajes más peso del engranaje). Estas cargas son las únicas que provocan
deformación a causa de los momentos flectores.
La deformación total se obtiene a partir de la suma de los cuadrados de las deformaciones, en
el plano y-z provocado por el momento flector XfM (ver ecuaciones en el apartado B.9.2), y
en el plano y-x provocado por el momento flector Zf
M (ver ecuaciones en el apartado B.9.2).
Pág. 68 Anexo
La deformación angular (β ) y la flecha (δ ) de un árbol de sección circular, se calculan
mediante las expresiones siguientes:
4( )
64
fMy dy
dEβ
π= ⋅
⋅⋅
∫ (Ec. B.9.4) 4( )
64
fMy dy dy
dEδ
π
= ⋅ ⋅ ⋅ ⋅
∫ ∫ (Ec.9.4)
E es el módulo de elasticidad y su valor es de 2210000 Nmm
.
B.9.4.1 Deformación debida al momento flector Zf
M
Utilizando las ecuaciones del momento flector Zf
M separadas en dos tramos (ver apartado
B.9.2), se obtienen cuatro constantes de integración. Utilizando las siguientes condiciones:
- Por continuidad 1 2(127.5 ) (127.5 )mm mmβ β= (y = 127.5mm es la sección límite entre los
tramos de momento Zf
M )
- Por continuidad 1 2(127.5 ) (127.5 )x xmm mmδ δ=
- Debido a los apoyos en los rodamientos (0 ) 0x mmδ = y (262.5 ) 0x mmδ =
Resolviendo el sistema de ecuaciones se obtiene una flecha máxima (sección y = 127.5mm),
en función del diámetro del árbol: 4
192145.5(127.5 )x mmd
δ =
B.9.4.2 Deformación debida al momento flector XfM
Se procede de la misma manera que en el apartado anterior, y se obtienen las constantes de
integración a partir de las mismas condiciones, ya que ( )XfM y se divide en los mismos tramos
que ( )Zf
M y , y la sección que los limita es también y = 127.5mm.

Anexo Pág. 69
Resolviendo el sistema de cuatro ecuaciones y cuatro incógnitas, se obtiene una flecha
máxima (esta vez en el plano y-z) en función del diámetro del árbol, que puede expresarse
mediante 4
198692.1(127.5 )z mmd
δ =
B.9.4.3 Determinación del diámetro necesario
El diámetro necesario puede obtenerse a partir de las expresiones de la flecha máxima,
provocada por cada momento flector, y de la condición para la flecha total 0.15mmδ ≤ .
2 2
4 4
198692.1 192145.50.15mmd d
≥ +
De esta expresión se obtiene que el diámetro mínimo para cumplir la condición es de 36.8mm.
B.9.5 Comprobación
Una vez se tienen las características del árbol en detalle (plano 31), se procede a realizar el
cálculo de las tensiones que solicitan a la sección crítica.
La sección crítica es la sección C de la figura B.9.2, con un diámetro d = 90mm.
B.9.5.1 Cálculo de las tensiones
El esfuerzo cortante 11428.6XT N= produce en la sección una distribución de tensiones
tangenciales. El valor máximo de esta tensión tangencial se calcula mediante la fórmula de
Collignon:
1 2 2 2
4 4 4 11428.6 1.9(90 )3 3 3
4 4
T T N Nd mmS mm
τπ π
= ⋅ = ⋅ = ⋅ =⋅ ⋅
Pág. 70 Anexo
El momento torsor alternativo 2000tM Nm= da lugar a una distribución de tensiones
tangenciales sobre la sección. El valor máximo de esta tensión se puede hallar mediante la
siguiente expresión:
3
2 3 3 2
2000 10 13.9(90 )
16 16
t t
t
M M Nmm Nd mmW mm
τπ π
⋅= = = =
⋅ ⋅
El punto más solicitado se halla en la periferia de la sección, y en la dirección perpendicular a
la del esfuerzo cortante. Las tensiones entre las que oscilara son:
max 2 2 21.9 13.9 15.8N N Nmm mm mm
τ = + = min 2 2 21.9 13.9 12N N Nmm mm mm
τ = − = −
Como puede observarse la tensión esta compuesta de una componente alternativa ( aτ ) igual a
213.9 Nmm
, y una componente media ( mτ ) igual a 21.9 Nmm
.
El esfuerzo normal 3502.8N Nm= da lugar a una distribución de tensiones normales
constantes, de valor:
1 2 2 2
3502.8 0.5(90 )
4 4
N N N Nd mmS mm
σπ π
= = = =⋅ ⋅
El momento flector 749.4Zf
M Nm= produce una distribución de tensiones normales. El
valor máximo de esta tensión puede hallarse mediante la expresión derivada de la teoría de
Navier:
3
2 3 3 2
749.4 10 10.5(90 )
32 32
f f
f
M M Nm Nd mmW mm
σπ π
⋅= = = =
⋅ ⋅
Anexo Pág. 71
El punto más solicitado se encuentra en la periferia de la sección, como pasaba con las
tensiones tangenciales. La tensión normal también se compone de una componente media, que
proviene del esfuerzo normal ( 20.5mN
mmσ = ), y de una componente alternativa, que proviene
del momento flector ( 210.5aN
mmσ = ).
B.9.5.2 Comprobación a fatiga
Tanto la tensión tangencial como la normal están compuestas de término medio y alternativo,
es decir se trata de un caso de tensión compuesta fluctuante. En este caso, se debe calcular la
tensión equivalente de Von Mises, y comprobar la vida del componente en el diagrama de
Goodman correspondiente.
En primer lugar se determina el límite a fatiga del árbol fS , a partir de los coeficientes de tipo
de carga lk , de tamaño dk , de acabado superficial sk , de concentración de tensiones fK , y
del límite a fatiga de la probeta estándar ' fS . El cálculo se realizará a partir de la siguiente
expresión [Bigordà y Fenollosa, 1993, p.23]:
1 'f l d s ff
S k k k SK
= ⋅ ⋅ ⋅ ⋅ (Ec. B.9.5)
El coeficiente de tipo de carga lk para una solicitación a flexión rotativa, y para un acero vale
1, y para una solicitación a torsión 0.58. Como el árbol está sometido a los dos tipos de carga
se escoge el valor más restrictivo 0.58.
El coeficiente que tiene en cuenta el efecto del tamaño dk , vale 0.75 ya que todas las
secciones del árbol tienen un diámetro superior a 50mm.
El coeficiente de acabado superficial sk , para un acero de 2800mNR
mm= con un acabado
superficial mecanizado, vale 0.725.

Pág. 72 Anexo
El coeficiente de concentración de tensiones fK se obtiene a partir del coeficiente de
concentración de tensiones teórico tK , y de la sensibilidad a la entalla q. La expresión que lo
determina es la siguiente [Bigordà y Fenollosa, 1993, p.34]:
1 ( 1)f tK q K= + ⋅ − (Ec. B.9.6)
Este caso se trata de un árbol de sección circular, con una ranura anular, sometido a flexión.
De la relación entre el radio de la entalla y el diámetro de la ranura se extrae, en la tabla
correspondiente [Bigordà y Fenollosa, 1993, p.39] el valor de tK = 1.5.
La sensibilidad a la entalla para el caso torsión, y acero templado es de q = 0.6.
A partir de los dos parámetros anteriores, y de la expresión B.9.6 se obtiene
1 0.6 (1.5 1) 1.3fK = + ⋅ − = .
El límite a fatiga de la probeta estándar para un acero de 2800mNR
mm= , y mecanizado, es de
2' 300fNS
mm= .
Una vez determinados todos los parámetros, mediante la expresión B.9.5 se determina el
límite a fatiga del árbol. En este caso será:
2 2
10.58 0.75 0.725 300 72.71.3f
N NSmm mm
= ⋅ ⋅ ⋅ ⋅ =
En segundo lugar se obtiene la tensión equivalente de Von Mises [Bigordà y Fenollosa, 1993,
p.57], a partir de las tensiones obtenidas en el apartado anterior.
2 2 2 22' ( ) 3 ( ) (1.3 10.5) 3 (1.3 13.9) 34.7a f a f a
NK Kmm
σ σ τ= ⋅ + ⋅ ⋅ = ⋅ + ⋅ ⋅ =
2 2 2 22' 3 0.5 3 1.9 3.3m m m
Nmm
σ σ τ= + ⋅ = + ⋅ =
Anexo Pág. 73
Puesto que el valor de la tensión media de Von Mises es muy próximo a 0, no es necesario
representar el diagrama de Goodman. Es suficiente comparar el valor de la tensión de Von
Mises alternativa 'aσ con la resistencia a fatiga obtenida fS .
En este caso el coeficiente de seguridad obtenido es el siguiente:
2
2
72.72.1
' 34.7
fS
a
NS mmC N
mmσ
= = =
Este valor se considera dentro del intervalo de seguridad recomendado (1,3-2).
Además, se debe tener en cuenta que el coeficiente de concentración de tensiones fK se ha
utilizado dos veces. Una al determinar la resistencia a fatiga, y otra al hallar las tensiones de
Von Mises. Teóricamente sólo es necesario en el segundo caso, pero el hecho de utilizarlo en
los dos refuerza el valor del coeficiente de seguridad hallado.
B.9.5.3 Comprobación de la deformación del árbol
Puesto que todas las secciones del árbol tienen un diámetro superior al mínimo calculado en el
apartado B.9.4.3, la flecha en la sección crítica no supondrá un problema en las condiciones
del engrane.

Pág. 74 Anexo

Anexo Pág. 75
B.10 RODAMIENTOS DEL ÁRBOL SOLIDARIO AL ENGRANAJE DE
FINAL DE CADENA
La solicitación a la que está sometido este árbol tiene componentes radiales y axiales, debido
al tipo de dentado del engranaje al que sostiene. Por tanto, los rodamientos seleccionados
deberán ser capaces de contrarestar las dos componentes de la fuerza.
La opción seleccionada es montar dos rodamientos de bolas de contacto angular, que absorbe
cargas axiales y radiales.
Como criterio de validación se escoge que los rodamientos tengan una duración superior a
10000 horas.
B.10.1 Determinación de las cargas
Los rodamientos que se alojan en el árbol, ocupan las secciones B y D de la figura B.10.1. Los
esfuerzos a que están sometidos han sido calculados en el apartado B.9.1.
En la sección B y D se colocan rodamientos de bolas de contacto angular, de designación
SKF-7315B, y de capacidad de carga dinámica C = 96500N.
Figura B.10.1 Esfuerzos sobre el árbol de final de cadena

Pág. 76 Anexo
Las solicitaciones a las que están sometidos son:
- Carga axial 3502.8YC N=
- 5877.5XB N= , 2800ZB N=
- 5551.1XD N= y 2644.6ZD N=
La componentes radiales se calcularán a partir de su descomposición en las direcciones z y x.
Por tanto 2 25877.5 2800 6510.4radialB N= + = , y 2 25551.1 2644.6 6148.9radialD N= + = .
La comprobación se realizará calculando la carga dinámica equivalente, para los dos
rodamientos.
En primer lugar se aplicará a las cargas, lo que se conoce como factor de corrección Zf . Este
factor depende del tipo de carga. Al realizarse la entrada de velocidad a través de un motor
eléctrico, se considera que no hay cargas de choque, y Zf =1.2.
1.2 3502.8 4203.4axialK N N= ⋅ =
1.2 6510.4 7812.5BradialF N N= ⋅ =
1.2 6148.9 7378.6DradialF N N= ⋅ =
B.10.2 Carga dinámica equivalente (P)
Se cumple que 0.57 0.57
B Dradial radialF F> y 0.5 ( )
0.57 0.57B Dradial radial
axial
F FK > ⋅ − , por lo que la carga axial se
supondrá aplicada en B. El valor de la carga axial se obtendrá a partir de la siguiente
expresión: 0.50.57
D
B
radialaxial axial
FF K= + ⋅

Anexo Pág. 77
a) Rodamiento de bolas de contacto angular SKF-735B de la sección D
Puesto que será el rodamiento de contacto angular en la sección B, el encargado de absorber la
carga axial, la carga dinámica equivalente para este caso es:
7378.6 1 7378.6 7378.6D BD axial radialP X F Y F Y N N N= ⋅ + ⋅ = ⋅ = ⋅ = .
b) Rodamiento de bolas de contacto angular SKF-7315B de la sección B
La fuerza axial, utilizada en el cálculo de la carga dinámica equivalente, es la siguiente:
7378.60.5 4203.4 0.5 109110.57
D
B B
raxial axial
D
F NF K NY
= + ⋅ = + ⋅ =
Puesto que se cumple 10911 1.36 1.147812.5
B
B
axial
radial
F NF N
= = > , la carga dinámica equivalente para el
rodamiento B se calcula mediante 0.35 0.57B BB radial axialP F F= ⋅ + ⋅ .
Utilizando la expresión anterior:
0.35 7812.5 0.57 10911 8953.6BP N N N= ⋅ + ⋅ =
B.10.3 Cálculo de la vida
El número de horas de vida de un rodamiento se obtiene mediante la siguiente expresión:
( ) 100500 3
ahL horas C
P n = ⋅ ⋅
(Ec. B.10.1)
- P(N) es la carga dinámica equivalente que se ha determinado anteriormente.
- C(N) es la capacidad de carga dinámica de un rodamiento.
- a depende del tipo de cuerpos rodantes, y en el caso ser bolas a = 3.
- n ( 1min− ) es la velocidad media de trabajo del rodamiento. En este caso se escoge el valor
Pág. 78 Anexo
calculado para los engranajes en el apartado B.5.1.1. El valor obtenido en dicho apartado es
148.5 rads
( 11418.1min− ).
A continuación se determina el número de horas de vida, utilizando la expresión B.10.1.
a) Rodamiento de bolas de contacto angular SKF-7215B de la sección D
3 3100 96500 100( ) 500 500 262903 7378.6 3 1418.1h
CL horas horasP n
= ⋅ ⋅ = ⋅ ⋅ = ⋅ ⋅
El valor obtenido es superior al número de horas mínimo exigido, que era de 10000horas
b) Rodamiento de bolas de contacto angular SKF-7215B de la sección B
3 3100 96500 100( ) 500 500 147143 8953.6 3 1418.1h
CL horas horasP n
= ⋅ ⋅ = ⋅ ⋅ = ⋅ ⋅
El valor obtenido es superior al número de horas mínimo exigido, que era de 10000horas
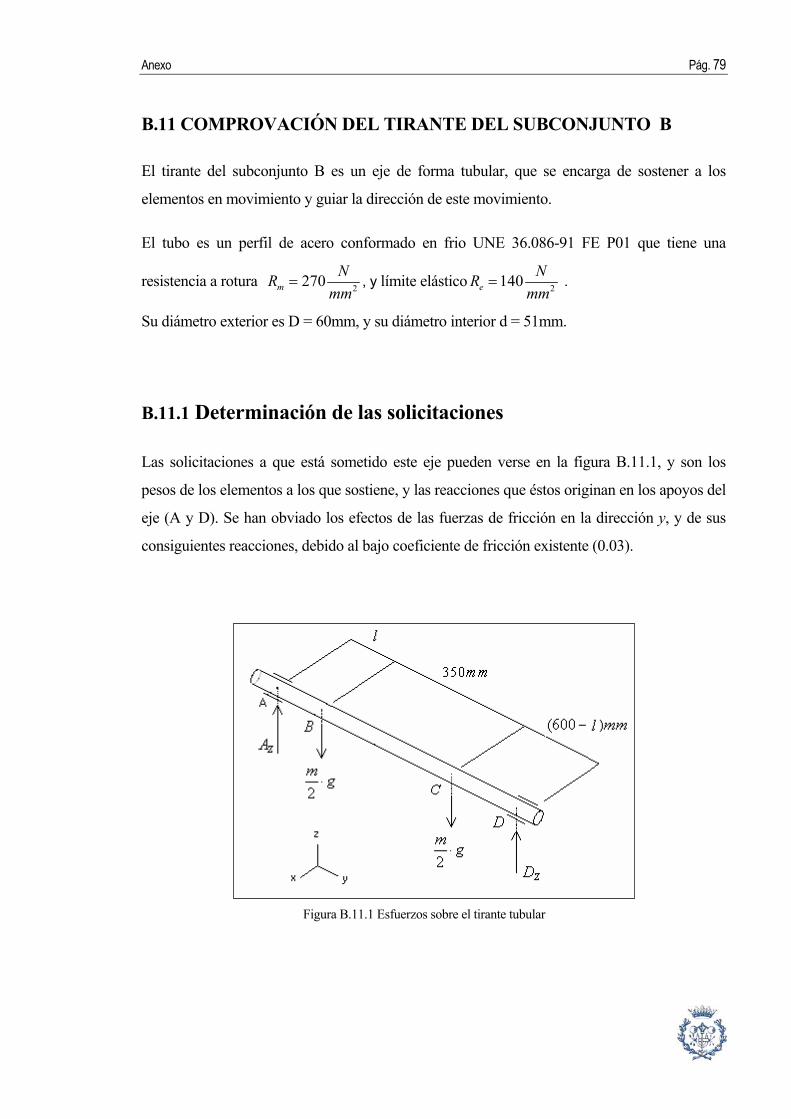
Anexo Pág. 79
B.11 COMPROVACIÓN DEL TIRANTE DEL SUBCONJUNTO B
El tirante del subconjunto B es un eje de forma tubular, que se encarga de sostener a los
elementos en movimiento y guiar la dirección de este movimiento.
El tubo es un perfil de acero conformado en frio UNE 36.086-91 FE P01 que tiene una
resistencia a rotura 2270mNR
mm= , y límite elástico 2140e
NRmm
= .
Su diámetro exterior es D = 60mm, y su diámetro interior d = 51mm.
B.11.1 Determinación de las solicitaciones
Las solicitaciones a que está sometido este eje pueden verse en la figura B.11.1, y son los
pesos de los elementos a los que sostiene, y las reacciones que éstos originan en los apoyos del
eje (A y D). Se han obviado los efectos de las fuerzas de fricción en la dirección y, y de sus
consiguientes reacciones, debido al bajo coeficiente de fricción existente (0.03).
Figura B.11.1 Esfuerzos sobre el tirante tubular
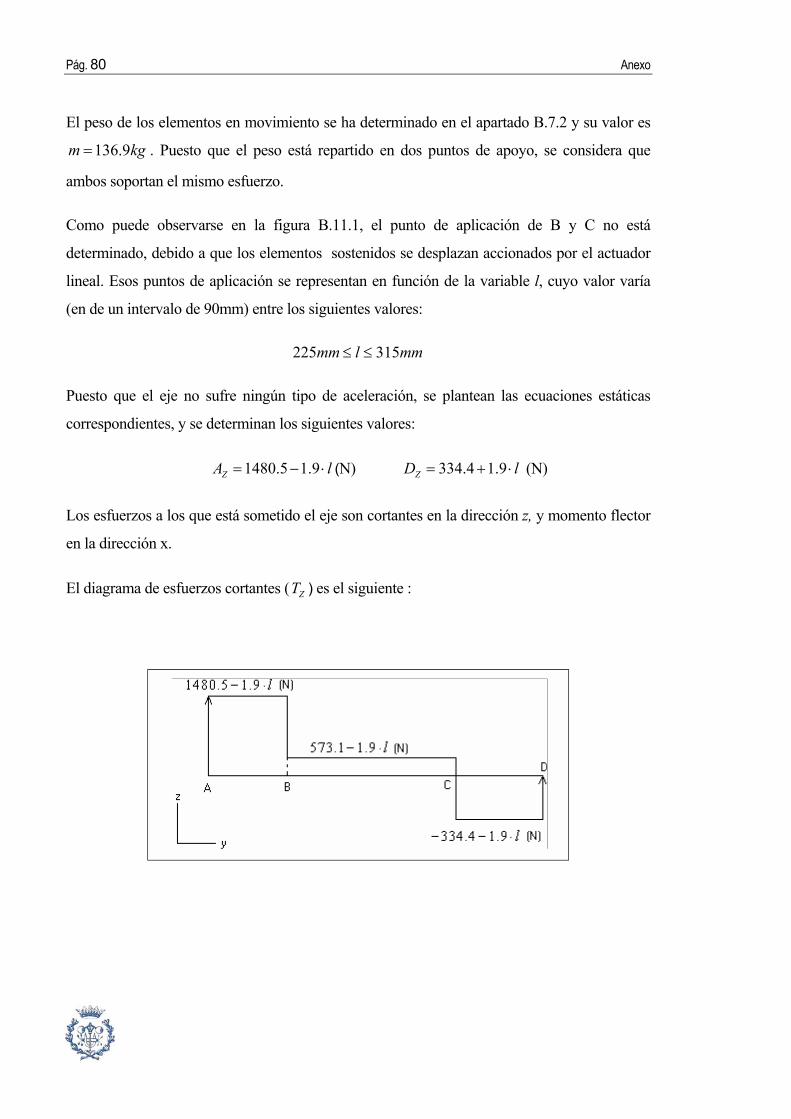
Pág. 80 Anexo
El peso de los elementos en movimiento se ha determinado en el apartado B.7.2 y su valor es
136.9m kg= . Puesto que el peso está repartido en dos puntos de apoyo, se considera que
ambos soportan el mismo esfuerzo.
Como puede observarse en la figura B.11.1, el punto de aplicación de B y C no está
determinado, debido a que los elementos sostenidos se desplazan accionados por el actuador
lineal. Esos puntos de aplicación se representan en función de la variable l, cuyo valor varía
(en de un intervalo de 90mm) entre los siguientes valores:
225 315mm l mm≤ ≤
Puesto que el eje no sufre ningún tipo de aceleración, se plantean las ecuaciones estáticas
correspondientes, y se determinan los siguientes valores:
1480.5 1.9ZA l= − ⋅ (N) 334.4 1.9ZD l= + ⋅ (N)
Los esfuerzos a los que está sometido el eje son cortantes en la dirección z, y momento flector
en la dirección x.
El diagrama de esfuerzos cortantes ( ZT ) es el siguiente :

Anexo Pág. 81
El diagrama de momentos flectores (XfM ) es el siguiente:
Escogiendo A como y = 0mm, las ecuaciones son las siguientes:
( )0 ( ) ( ) (1480.5 1.9 )
185( ) ( )(350 ) ( ) (1480.5 1.9 ) ( 9.81) ( )2
185( )(350 ) ( )950 ( ) (1480.5 1.9 ) ( 9.81) ( )2
185( 9.81) ( (350 ))2
X
X
X
f
f
f
A mm y B l M y l y
B l y C l mm M y l y y l
C l mm y D mm M y l y y l
y l
≤ ≤ → = − ⋅ ⋅
≤ ≤ + → = − ⋅ ⋅ − ⋅ ⋅ −
+ ≤ ≤ → = − ⋅ ⋅ − ⋅ ⋅ − −
− ⋅ ⋅ − +
A la vista de los diagramas de esfuerzos, la sección crítica del tubo es la B. Esta sección es
variable en el intervalo 225 315mm y mm≤ ≤ , por lo que la sección más solicitada del tubo es
una de las comprendidas en su interior.
Los esfuerzos cortantes, al ser variables en cada sección en función de l, tienen una
componente media, y una componente alternativa.
Para todas las secciones que pertenecen al intervalo anterior, se cumple que
max 1450.5 1.9T l= − ⋅ y min 573.1 1.9T l= − ⋅ .
Las componentes media y alternativa de este esfuerzo son:
max minm 1023.6 1.9 ( )
2T TT l N+
= = − ⋅ max min 453.72a
T TT N−= =
Pág. 82 Anexo
La componente media es máxima cuando l = 225mm, y vale m 599.3T N=
En cuanto al momento flector que soportan cada una de las secciones B, varia en cada instante
en función del valor de l. Por este motivo, existe una componente media y otra componente
alternativa.
En cada una de las posiciones extremas de l, el momento que solicita a la sección B es:
-Si l = 225mm, la sección B está afectada por la ecuación:
1 1
185( ) (1480.5 1.9 ) ( 9.81) ( ) ( ) 145.6 204170.62X Xf fM y l y y l M y y= − ⋅ ⋅ − ⋅ ⋅ − → = ⋅ +
-Si l=315mm, la sección B está afectada por la ecuación:
2 2( ) (1480.5 1.9 ) ( ) 882
X Xf fM y l y M y y= − ⋅ ⋅ → = ⋅
En ambos casos el momento es máximo en la sección y = 315mm, en la que:
1(315) 250
XfM Nm= y 2(315) 277.8
XfM Nm=
Las componentes media y alternativa de este esfuerzo son:
max min 263.92
f ff m
M MM Nm
+= = max min 27.8
2f f
f a
M MM Nm
−= =
B.11.2 Determinación de las tensiones
A partir de las solicitaciones a las que está sometido el tubo, se pueden obtener las tensiones
que solicitan cada una de sus secciones.
La sección más solicitada es la B, tal y como se ha visto en el apartado anterior.
Según la teoria de Collignon, los esfuerzos cortantes producen sobre la sección, las siguientes
tensiones tangenciales máximas (alternativa y media):
2 2 2
599.32 2 1.5((60 ) (51 ) )
4
mm
T N Nmm mmS mm
τπ
= ⋅ = ⋅ =−

Anexo Pág. 83
2 2 2
453.72 2 1.1((60 ) (51 ) )
4
aa
T Nmm mmS mm
τπ
= ⋅ = ⋅ =−
Debido a su valor se neglige el efecto de las tensiones tangenciales.
Los momentos flectores producen sobre la sección tensiones normales, que pueden
determinarse utilizando el principio de Navier.
Las tensiones normales máximas (media y alternativa) sobre la sección B son:
3
4 4 2
263.9 10 26((60 ) (51 ) )
32 60
mfm
f
M Nmm Nmm mmW mm
mm
σπ
⋅= = =
−⋅
3
4 4 2
27.8 10 2.7((60 ) (51 ) )
32 60
afa
f
M Nmm Nmm mmW mm
mm
σπ
⋅= = =
−⋅
A la vista de los valores obtenidos, se determina que es negligible el efecto de la componente
alternativa sobre la sección del tubo. Éste último unicamente se considera afectado por la
componente media de la tensión normal.
Comparando el valor de la tensión normal media con las características del tubo, se puede
determinar lo siguiente:
- La deformación plástica debida al momento flector se puede considerar nula, ya que el factor
de seguridad entre la resistencia elástica y la tensión solicitante es:
2
1
2
1405.4
26
es
m
NR mmC N
mmσ
= = =
Con este valor también se garantiza que la deformación elástica será muy próxima a 0º,
facilitando de esta manera, el correcto guiado de las carcasas a traves del tubo.

Pág. 84 Anexo
- La resistencia a rotura está completamente garantizada, ya que el factor de seguridad entre la
resistencia a rotura y la tensión solicitante es:
2
2
2
27010.4
26
ms
m
NR mmC N
mmσ
= = =

Anexo Pág. 85
B.12 RESISTENCIA DE LOS COJINETES EN QUE SE APOYA EL
TIRANTE
El tirante se encuentra apoyado en dos puntos mediante cojinetes. Las dimensiones de estos
son:
Diámetro interior (d): 60mm
Diámetro exterior (D): 70mm
Longitud (L): 50mm
Puesto que trabajan a velocidad nula con respeto al tubo al que alojan, según el fabricante
(AMES) su carga permisible es de 227 Nmm
.
La solicitación a la que están sometidos depende de la posición de los elementos en
movimiento, que sostiene el tirante.
En el apartado B.11.1 se ha determinado que el valor máximo de la reacción sobre los apoyos
(secciones A y D del tubo):
1480.5 1.9ZA l= − ⋅ (N) 334.4 1.9ZD l= + ⋅ (N)
El valor de l está comprendido en 225 315mm l mm≤ ≤ . Substituyendo en las ecuaciones
anteriores los valores de l, se obtiene una reacción máxima sobre los apoyos de 1053N.
A partir de este valor, y de la superficie interior proyectada del cojinete, se comprueba su
resistencia:
max max2 2
105327 0.3550 60
Z Z
proyectada
A AN N Nmm S d L mm mm mm
≥ = = =⋅ ⋅
La resistencia de los cojinetes está garantizada .

Pág. 86 Anexo
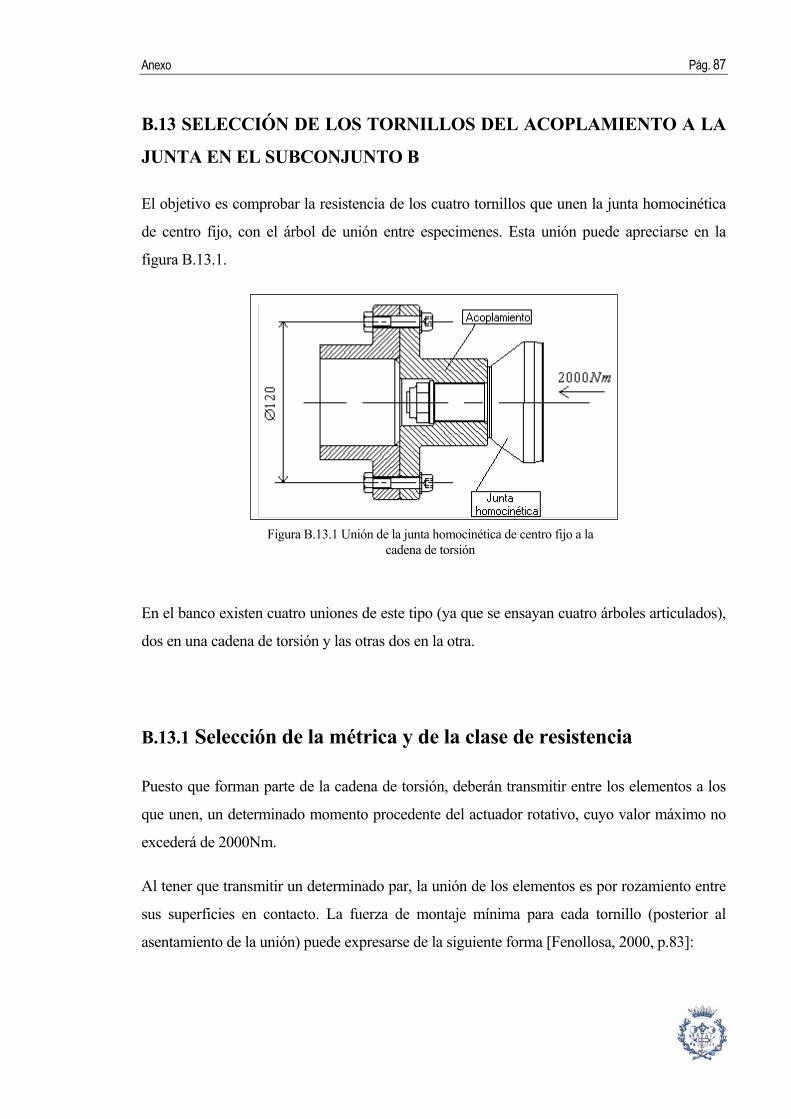
Anexo Pág. 87
B.13 SELECCIÓN DE LOS TORNILLOS DEL ACOPLAMIENTO A LA
JUNTA EN EL SUBCONJUNTO B
El objetivo es comprobar la resistencia de los cuatro tornillos que unen la junta homocinética
de centro fijo, con el árbol de unión entre especimenes. Esta unión puede apreciarse en la
figura B.13.1.
En el banco existen cuatro uniones de este tipo (ya que se ensayan cuatro árboles articulados),
dos en una cadena de torsión y las otras dos en la otra.
B.13.1 Selección de la métrica y de la clase de resistencia
Puesto que forman parte de la cadena de torsión, deberán transmitir entre los elementos a los
que unen, un determinado momento procedente del actuador rotativo, cuyo valor máximo no
excederá de 2000Nm.
Al tener que transmitir un determinado par, la unión de los elementos es por rozamiento entre
sus superficies en contacto. La fuerza de montaje mínima para cada tornillo (posterior al
asentamiento de la unión) puede expresarse de la siguiente forma [Fenollosa, 2000, p.83]:
Figura B.13.1 Unión de la junta homocinética de centro fijo a la cadena de torsión

Pág. 88 Anexo
min' T SM
F CFn m µ
⋅=
⋅ ⋅ (Ec. B.13.1)
La fuerza tangencial TF a transmitir puede hallarse a partir del momento máximo, y de la
distancia entre el punto de aplicación y el centro del eje. De esta manera se obtiene:
3
2000 33333.360 10T
NmF Nm−= =
⋅
Como coeficiente de seguridad SC se escoge 1.25, y como coeficiente de rozamiento µ se
toma el valor de 0.15. Estos valores son los más usuales para máquinas.
Trabajan diez tornillos (n = 10), y hay un contacto entre superficies (m = 1).
La fuerza de montaje mínima después del asentamiento, a partir de la expresión B.13.1 resulta:
min
33333.3 1.25' 27777.810 1 0.15M
NF N⋅= =
⋅ ⋅
La variación que experimenta la fuerza de montaje, después del periodo de asentamiento, está
generalmente acotada entre el 20% y el 40% del valor de min
'MF . Escogiendo un criterio
conservador se decide que min
0.4 'm MF F∆ = ⋅ .
De esta manera la fuerza mínima inicial necesaria [Fenollosa, 2000, p.63] es:
min min min min min' ' 0.4 ' 1.4 ' 1.4 27777.8 38888.9M M m M M MF F F F F F N N= + ∆ = + ⋅ = ⋅ = ⋅ =
La fuerza de montaje se aplicará con una llave dinamométrica y la unión estará lubricada, por
lo que como factor de collada Cα [Fenollosa, 2000, p.42] se escoge el valor de 1.4.
La fuerza de montaje máxima es:
max min38888.9 1.4 54444.4M M CF F N Nα= ⋅ = ⋅ =
Escogiendo como coeficiente de rozamiento global Gµ de 0.12 y consultando las tablas
adecuadas [Fenollosa, 2000, p.75], se decide que la métrica sea M12 y la clase de resistencia
10.9. La fuerza de montaje límite para este tipo es lim max
56250 54444.4M MF N F N= > = .

Anexo Pág. 89
En esa misma tabla puede encontrarse el momento de montaje a aplicar para conseguir esa
fuerza de montaje límite. Su valor es 109MM Nm= .
El momento prescrito 'MM para el montaje de esta unión es:
' 0.9 109 0.9 98.1M MM M Nm Nm= ⋅ = ⋅ =

Pág. 90 Anexo
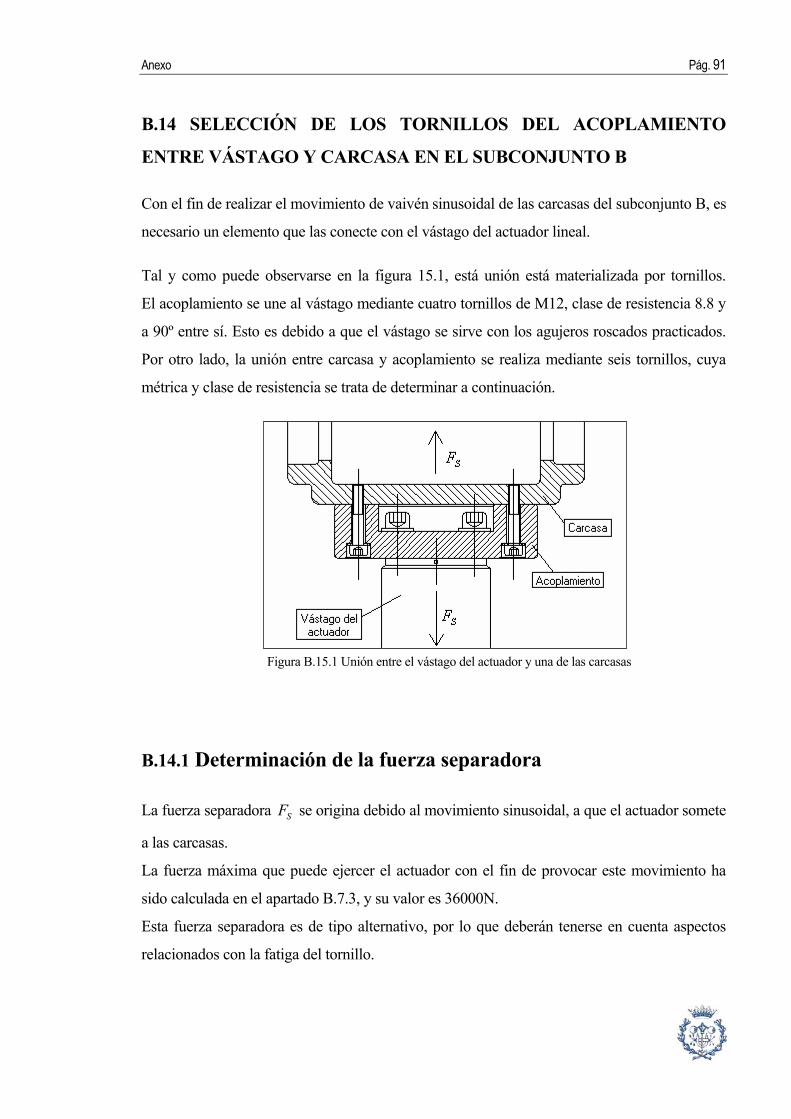
Anexo Pág. 91
B.14 SELECCIÓN DE LOS TORNILLOS DEL ACOPLAMIENTO
ENTRE VÁSTAGO Y CARCASA EN EL SUBCONJUNTO B
Con el fin de realizar el movimiento de vaivén sinusoidal de las carcasas del subconjunto B, es
necesario un elemento que las conecte con el vástago del actuador lineal.
Tal y como puede observarse en la figura 15.1, está unión está materializada por tornillos.
El acoplamiento se une al vástago mediante cuatro tornillos de M12, clase de resistencia 8.8 y
a 90º entre sí. Esto es debido a que el vástago se sirve con los agujeros roscados practicados.
Por otro lado, la unión entre carcasa y acoplamiento se realiza mediante seis tornillos, cuya
métrica y clase de resistencia se trata de determinar a continuación.
B.14.1 Determinación de la fuerza separadora
La fuerza separadora SF se origina debido al movimiento sinusoidal, a que el actuador somete
a las carcasas.
La fuerza máxima que puede ejercer el actuador con el fin de provocar este movimiento ha
sido calculada en el apartado B.7.3, y su valor es 36000N.
Esta fuerza separadora es de tipo alternativo, por lo que deberán tenerse en cuenta aspectos
relacionados con la fatiga del tornillo.
Figura B.15.1 Unión entre el vástago del actuador y una de las carcasas

Pág. 92 Anexo
La fuerza separadora máxima que soporta cada tornillo es 36000 60006S
NF N= = .
B.14.2 Selección de la métrica y de la clase de resistencia
Como criterio de diseño se decide que la fuerza de compresión de las piezas unidas, después
de la fase de asentamiento debe ser:
' 0.2 0.2 6000 1200p SF F N= ⋅ = ⋅ =
Como relación de rigidez c se escoge un valor usual 0.2, y como nivel de acción de la fuerza
separadora i se escoge el valor de 0.5. Este valor se escoge por la relación entre las longitudes
de descompresión y de compresión del tornillo, cuando actúa la fuerza separadora.
Combinando los valores anteriores se obtiene la relación de rigidez alterada [Fenollosa, 2000,
p.66]:
' 0.1c c i= ⋅ = .
A partir de esta relación puede calcularse la parte de la fuerza separadora que absorben las
piezas unidas [Fenollosa, 2000, p.66]:
(1 ') (1 0.1) 6000 5400SP SF c F N N= − ⋅ = − ⋅ =
La fuerza de montaje que es necesario que se mantenga después de la fase de asentamiento es:
' ' 5400 1200 6600MIN SM P PF F F N N N= + = + =
La variación que experimenta la fuerza de montaje, después del periodo de asentamiento, está
generalmente acotada entre el 20% y el 40% del valor de min
'MF . Escogiendo un criterio
conservador se decide que min
0.4 'm MF F∆ = ⋅ .

Anexo Pág. 93
La fuerza de montaje mínima que es necesaria antes del asentamiento puede expresarse a
partir de los dos términos anteriores, de la siguiente forma [Fenollosa, 2000, p.63]:
' 6600 0.4 6600 6600 2640 9240MIN MINM M mF F F N N N N N= + ∆ = + ⋅ = + =
La fuerza de montaje se aplicará con una llave dinamométrica y la unión estará lubricada, por
lo que como factor de collada Cα [Fenollosa, 2000, p.42].se escoge el valor de 1.4.
La fuerza de montaje máxima es:
max min9240 1.4 12936M M CF F N Nα= ⋅ = ⋅ =
Escogiendo como coeficiente de rozamiento global Gµ de 0.12 y consultando las tablas
adecuadas [Fenollosa, 2000, p.75], se decide que la métrica sea M8 y la clase de resistencia
8.8.
La fuerza de montaje límite para este tipo es lim max
16500 12936M MF N F N= > = .
En esa misma tabla puede encontrarse el momento de montaje a aplicar para conseguir esa
fuerza de montaje límite. Su valor es 25MM Nm= .
El momento prescrito ( 'MM ) para el montaje de esta unión es:
' 0.9 25 0.9 22.5M MM M Nm Nm= ⋅ = ⋅ =
B.14.3 Comprobación
Una vez seleccionados los tornillos se comprueba la validez de las hipótesis realizadas, y la
resistencia de los tornillos.
En primer lugar se calculan las constantes de rigidez del tornillo y de las piezas. La rigidez del
tornillo resulta de 254950TNK
mm= . La rigidez de las piezas unidas, utilizando la
Pág. 94 Anexo
formulación para piezas extensas, es de 929214PNK
mm= .
La relación de rigidez se obtiene mediante la siguiente expresión [Fenollosa, 2000, p.54]:
254950 0.22254950 929214
T
T P
KcK K
= = =+ +
El valor obtenido es muy similar a 0.2, que es el que se ha utilizado como hipótesis
anteriormente.
En segundo lugar se determina la variación de la fuerza de montaje, transcurrido el periodo de
asentamiento. Para realizar este cálculo se debe tener en cuenta que la deformación se
producirá en dos zonas de unión y en una zona roscada. En las zonas de unión la deformación
estimada ( Jx∂ ) es de 4 mµ , y en la zona roscada ( Rx∂ ) de 5 mµ .
A partir de lo anterior, la variación de la fuerza de montaje se obtiene [Fenollosa, 2000, p.62]:
3 3( ) (2 4 10 5 10 ) 0.22 929214 2657M J J PNF x x c K mm mm N
mm− −∆ = ∂ + ∂ ⋅ ⋅ = ⋅ ⋅ + ⋅ ⋅ ⋅ =
El valor obtenido es muy similar a los 2640N, que es el que se ha utilizado como hipótesis
anteriormente.
Para finalizar se realiza la comprobación de la resistencia a fatiga del tornillo. Este cálculo se
realiza debido a que la fuerza separadora es alternativa.
La componente alternativa de la tensión ( aσ ), que solicita al tornillo debido a la fuerza
separadora puede obtenerse con la siguiente expresión [Fenollosa, 2000, p.78]:
2S SMAX MINT T
anucli
F FA
σ+
=⋅
nucliA es la sección del núcleo del tornillo, y para uno de M8 tiene el valor de 232.8mm .
STF es la parte de la fuerza separadora que afecta al tornillo.

Anexo Pág. 95
Se calcula de la siguiente forma:
' (0.22 0.5) 6000 660ST SF c F N N= ⋅ = ⋅ ⋅ =
De esta manera la amplitud de la tensión a fatiga solicitante es:
2 2
2 660 20.132.8a
N Nmm mm
σ⋅
= =
La resistencia a la fatiga varía muy poco con la variación de la tensión media mσ . Por este
motivo, se compara la amplitud de la resistencia a fatiga (con independencia de la componente
media) con la componente alternativa solicitante.
La amplitud de la resistencia a fatiga de un tornillo M8, clase de resistencia 8.8, roscado y
posteriormente bonificado es de 260 Nmm
[Fenollosa, 2000, p.79].
Comparando el valor de la resistencia a fatiga con la tensión alternativa solicitante se obtiene
un coeficiente de seguridad de 3.

Pág. 96 Anexo

Anexo Pág. 97
C. ESTUDIO ECONÓMICO
C.1 INTRODUCCIÓN
Como se explica en la memoria, el objetivo de este proyecto no esta enfocado hacia la
comercialización de un producto, sino hacia el diseño unitario de una máquina, que debe
ofrecer una serie de prestaciones.
Por este motivo, en el estudio económico del proyecto no tiene sentido esperar el retorno de la
inversión inicial debido a que es sumamente complejo establecer desde el punto de vista
económico, el beneficio que se va a obtener de la máquina. El beneficio se obtendrá
indirectamente con el óptimo funcionamiento de los ensayos (a partir de las conclusiones que
se extraigan de los mismos).
C.2 PRECIO UNITARIO DE LOS ELEMENTOS
C.2.1 Elementos que se compran
Consultando con los respectivos fabricantes se obtienen los siguientes precios:
a) Motor eléctrico de corriente continua, Siemens 1G.6 164-0JG4.-6VV5 81.5Kw: 5500€
b) Actuador rotativo hidráulico MTS 217 2000-100 + Servo-válvula MTS 252.4 +
Controladores de la servo-válvula + Software necesario para el control de funcionamiento:
29450€
b) Actuador lineal hidráulico MTS 248.04 + Servo-válvula MTS 252.4 + Controladores de la
servo-válvula + Software necesario para el control de funcionamiento: 17000€
c) Embrague dentado electromagnético Mönninghoff 546.31 + Acoplamiento elástico: 3000€
d) Embrague dentado electromagnético Mönninghoff 543.33: 4500€
e) Transductor de par HBM T32FNA: 4500€
Pág. 98 Anexo
f) Rodamientos y cojinetes: entre 12€-30€ para los modelos utilizados en la máquina
g) Tornillos + arandelas + tuercas + chavetas: se estima un precio global de 100€
h) Retenes + Mirillas + Aceite para lubricar: 200€
C.2.2 Elementos de los que se encarga la fabricación
a) Bancada
Cada uno de los tres subconjuntos está sostenido por una bancada. Éstas están formadas de
perfiles en L, y placas de función gris. El precio que se estima para la fabricación de cada una
de ellas es de 1500€.
b) Carcasas de engranajes y actuadotes rotativos
Al tratarse de piezas de fabricación unitaria obtenidas por moldeo, resultarán poco rentables
desde el punto de vista económico. Esto es debido a que el precio del modelo, no será
amortizado posteriormente con los hipotéticos beneficios de una fabricación en serie.
El precio del modelo para las carcasas de engranajes (se puede utilizar el mismo) es de 6000€,
y el proceso de fundición más el material de 650€.
Para las carcasas de los actuadotes rotativos, el precio del modelo es de 5000€ y el proceso de
fundición más el material de 350€.
c) Árboles
El precio de fabricación de los árboles no es fijo, debido a la variedad de ejes y árboles de que consta el banco.
Sus precios de fabricación estarán comprendidos entre 60€ y 150€, en función del material utilizado, y de los procesos de fabricación necesarios para su materialización.
d) Tapas, pletinas y soportes
El precio de estos elementos varía según la complejidad de su forma estructural, y de su proceso de obtención.
Anexo Pág. 99
Sus precios de fabricación estarán comprendidos entre 30€ y 90€.
e) Engranajes
El precio de obtención de cada engranaje (incluye obtención de modelo en bruto, tallado y tratamiento posterior) es de 900€ para cada engranaje solidario al actuador, y 600€ para cada engranaje de accionamiento o final de cadena.
d) Acoplamientos
El precio de obtención de estos elementos varia entre 30€ y 100€.
C.3 COSTE DEL DISEÑO Y MONTAJE DEL BANCO DE ENSAYO
El diseño y el montaje del banco de ensayo corren a cargo de un Ingeniero Industrial y un
maestro Industrial.
El salario que perciben por hora es de €50h
para el Ingeniero Industrial, y €36h
para el
Maestro Industrial. El Ingeniero dedica al proyecto un total de 550 horas, mientras que en el
montaje se dedican un total de 80 horas.
El coste que supone el trabajo del ingeniero es de: €50h
· 550h = 27500€, y el coste que
supone el trabajo del maestro industrial es de: €36h
· 80h = 2880€
C.4 PRECIO TOTAL DEL BANCO DE ENSAYO
A partir de los precios unitarios obtenidos en los apartados anteriores, se puede determinar el
precio total del banco de ensayo.
Sumando los precios totales de cada uno de los elementos de la tabla C.1, se obtiene que la inversión necesaria para la materialización del banco de ensayo es de 145.353 €.
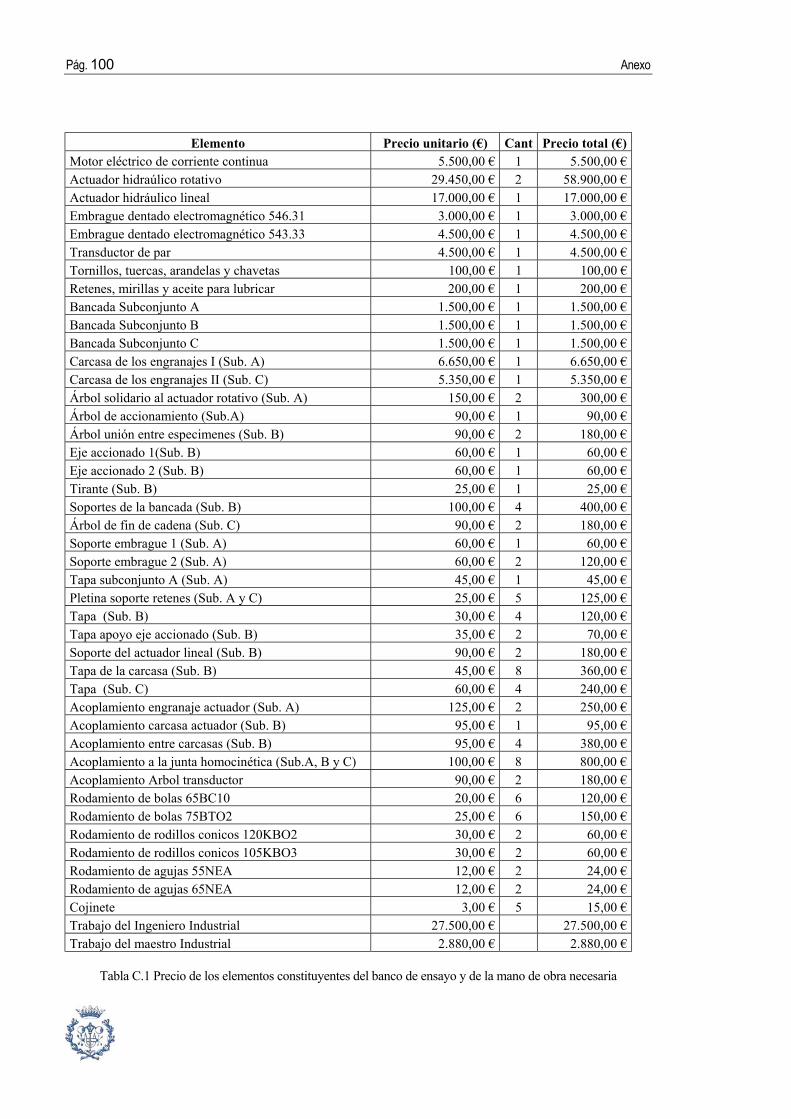
Pág. 100 Anexo
Elemento Precio unitario (€) Cant Precio total (€) Motor eléctrico de corriente continua 5.500,00 € 1 5.500,00 € Actuador hidraúlico rotativo 29.450,00 € 2 58.900,00 € Actuador hidráulico lineal 17.000,00 € 1 17.000,00 € Embrague dentado electromagnético 546.31 3.000,00 € 1 3.000,00 € Embrague dentado electromagnético 543.33 4.500,00 € 1 4.500,00 € Transductor de par 4.500,00 € 1 4.500,00 € Tornillos, tuercas, arandelas y chavetas 100,00 € 1 100,00 € Retenes, mirillas y aceite para lubricar 200,00 € 1 200,00 € Bancada Subconjunto A 1.500,00 € 1 1.500,00 € Bancada Subconjunto B 1.500,00 € 1 1.500,00 € Bancada Subconjunto C 1.500,00 € 1 1.500,00 € Carcasa de los engranajes I (Sub. A) 6.650,00 € 1 6.650,00 € Carcasa de los engranajes II (Sub. C) 5.350,00 € 1 5.350,00 € Árbol solidario al actuador rotativo (Sub. A) 150,00 € 2 300,00 € Árbol de accionamiento (Sub.A) 90,00 € 1 90,00 € Árbol unión entre especimenes (Sub. B) 90,00 € 2 180,00 € Eje accionado 1(Sub. B) 60,00 € 1 60,00 € Eje accionado 2 (Sub. B) 60,00 € 1 60,00 € Tirante (Sub. B) 25,00 € 1 25,00 € Soportes de la bancada (Sub. B) 100,00 € 4 400,00 € Árbol de fin de cadena (Sub. C) 90,00 € 2 180,00 € Soporte embrague 1 (Sub. A) 60,00 € 1 60,00 € Soporte embrague 2 (Sub. A) 60,00 € 2 120,00 € Tapa subconjunto A (Sub. A) 45,00 € 1 45,00 € Pletina soporte retenes (Sub. A y C) 25,00 € 5 125,00 € Tapa (Sub. B) 30,00 € 4 120,00 € Tapa apoyo eje accionado (Sub. B) 35,00 € 2 70,00 € Soporte del actuador lineal (Sub. B) 90,00 € 2 180,00 € Tapa de la carcasa (Sub. B) 45,00 € 8 360,00 € Tapa (Sub. C) 60,00 € 4 240,00 € Acoplamiento engranaje actuador (Sub. A) 125,00 € 2 250,00 € Acoplamiento carcasa actuador (Sub. B) 95,00 € 1 95,00 € Acoplamiento entre carcasas (Sub. B) 95,00 € 4 380,00 € Acoplamiento a la junta homocinética (Sub.A, B y C) 100,00 € 8 800,00 € Acoplamiento Arbol transductor 90,00 € 2 180,00 € Rodamiento de bolas 65BC10 20,00 € 6 120,00 € Rodamiento de bolas 75BTO2 25,00 € 6 150,00 € Rodamiento de rodillos conicos 120KBO2 30,00 € 2 60,00 € Rodamiento de rodillos conicos 105KBO3 30,00 € 2 60,00 € Rodamiento de agujas 55NEA 12,00 € 2 24,00 € Rodamiento de agujas 65NEA 12,00 € 2 24,00 € Cojinete 3,00 € 5 15,00 € Trabajo del Ingeniero Industrial 27.500,00 € 27.500,00 € Trabajo del maestro Industrial 2.880,00 € 2.880,00 €
Tabla C.1 Precio de los elementos constituyentes del banco de ensayo y de la mano de obra necesaria
Anexo Pág. 101


Anexo Pág. 103