ﻢﺘﻔﻫ ﻞﺼﻓ ﮏﯿﻣﺎﻨﯾد -...
TRANSCRIPT

فصل هفتم
دینامیکDYNAMICS
Hamedan University of TechnologyB. Miripour Fard 1
بهنام میري پور فرداستادیار گروه مهندسی رباتیک دانشگاه صنعتی همدان
همدان، ایران

B. Miripour Fard Hamedan University of Technology 2
دو روش مرسوم براي حل معادالت دینامیکی رباتها
اویلر-روش نیوتن
)روش تغییراتیمبتنی بر (روش الگرانژ
:فواید روش الگرانژ
ورت جداگانه در نظـر گرفتـه شـوند، بـه صــ سیستم ذرات و اجسام صلب بجاي آنکه به صورت مؤلفه هاي1. یکپارچه در نظر گرفته می شوند
.مسایل بر حسب انرژي جنبشی و کار که هر دو کمیت هاي اسکالر هستند فرمول بندي می شوندـ2
.ـ نیروهاي قیدي که کاري انجام نمی دهند در روابط وارد نمی شوند3
.فرمول بندي را تسهیل می نمایدبجاي مختصات فیزیکی موجب سادگی شده وـ استفاده از مختصات عمومی4
.به کار می رودضرایب الگرانژ و یا قانون نیوتن براي محاسبه نیروهاي قیدي

B. Miripour Fard Hamedan University of Technology 3
الگرانژ-معادالت اویلر
mg
x
y f
را می توان از معادالت نیوتن به الگرانژ-معادالت اویلر:مثال. دست آورد
تعریفالگرانژ-معادله اویلر

B. Miripour Fard Hamedan University of Technology 4
الگرانژ-معادالت اویلر
:برخی تعاریف مقدماتی
مختصات عمومی، درجه آزادي و قیودم یک مجموعه از مختصات کامل خوانده می شود اگر مقادیر آنها در یک وضعیت دلخـواه مجـاز از سیسـت
. براي معلوم کردن موقعیت همه اجزاي سیستم کافی باشد
ثابـت یک مجموعه از مختصات مستقل نامیده می شود اگر، هنگامیکه همه مختصه ها بجز یکی از آن ها را
. ، هنوز یک محدوده از وضعیت ها براي آن مجموعه باقی مانده باشدداریمنگه
.خوانده می شودnمختصه یک دستگاه کامل و مستقل را ایجاد کند، درجۀ آزادي سیستمnاگر

B. Miripour Fard Hamedan University of Technology 5
.وجود می آینددر یک سیستم دینامیکی، قیود سینماتیکی اغلب به سبب روابط بین جابجایی ها بقیـد وجـود Rاي، اگـرذرهNدر یـک سیسـتم . یک ذره بدون قید تنها سه درجه آزادي انتقالی دارد
:داشته باشد درجۀ آزادي سیستم
N=3N-R
.انتخاب مختصات عمومی یکتا نیست
است مختصه nبنابراین وقتی که درجۀ آزادي . تعداد مختصات هاي عمومی برابر درجۀآزادي می باشدq1هاي عمومی ,…,qn را تشکیل می دهندکامل و مستقل ، یک دستگاه.
)تعمیم یافته(عمومی مختصات
. در روش الگرانژ باید مختصه هاي عمومی انتخاب شوند

B. Miripour Fard Hamedan University of Technology 6
ϕ
r
θ
x
y
:مثالطه ثابت یک جسم صلب که توسط یک فنر بدون جرم به یک نق
.متصل استxyحرکت در صفحه
),,( ϕθr
),,( ϕyx
جایگزین شود دو قید اضافی aحال اگر فنر انعطاف پذیر با یک میله صلب به طول ثابت:به وجود می آید
انتخاب هاي دیگر هم می تواند وجود داشته باشد
θϕ == ar
.دآنگاه تعداد مختصاتی که براي توضیح سیستم الزمند به یک کاهش می یاب
هاي عمومی انتخاب مختصه

B. Miripour Fard Hamedan University of Technology 7
RjdxadtaM
kkjkj ,...,1 , 0
10 ==+∑
=
قیودx1مختصات Mفرض کنید که , x2 ,…,xM را براي بیان وضعیت یک سیستم انتخاب کرده باشیم و اینM مختصات مستقل
.بیان می شود،خوانده می شود) Pfaffian(شکل کلی قید با فرم دیفرانسیلی که فافین. قید به هم مرتبط باشندRنباشند و با :قید به صورت زیر بیان می شوندRدر فرم فافین،
قید، مستقل خطی هستند Rفرض می شود که
gjتابع قید (دیفرانسیل کامل باشد قیدتابع انتگرال پذیر باشند و هااگر همۀ فافین (x1,…,xr ,t)(
dgj (x1,…,xr ,t)=0
j=1,…R
ه بآن را قید هولونومیک نامیده می شود اگر به عبارت دیگر یک.خوانده می شود) Holonomic(سیستم هولونومیک
:صورت زیر بتوان نوشتgj (x1,…,xr ,t)=0
) Nonholonmic(غیرهولونومیک ) و سیستم(فافین ها انتگرال پذیر نباشند قیددر غیر اینصورت اگر حداقل یکی از
.خوانده می شود

B. Miripour Fard Hamedan University of Technology 8
مثال.بلغزدمی چرخد،zحول محوربا سرعت زاویه اي ثابتxyآزاد است تا بر روي یک میله که در صفحۀ )لغزنده اي(مهره اي
به همدیگر مربوط هستندyوxدو درجه آزادي G.C: (x,y))مختصات تعمیم یافته(
0ω
X
Y
y
α
x
o
xcy −
=αtan
t0ωα =
0cyxt0 =+−ω )(tan
0dyadxadta 210 =++
یکسیستمبنابرایناست)g(x,y,t)=0(گرفتهانتگرالفرمبهخودقیدایناستزیرصورتبهقیدفافینفرم.استهولونومیکقیدوداردآزاديدرجه
[ ] 0dydxtdtxt 0002 =−ω+ωω )(tan)(sec
0=∂∂
+∂∂
+∂∂
= dyygdx
xgdt
tgdg
c

B. Miripour Fard Hamedan University of Technology 9
X
Y
y
φx
o
مثالحرکت دو بعدي یک قایق را در صفحه
dxdytan =ϕ
),,(:G.C ϕyx
0dydx =−ϕ)(tan
مقایسه با فرم اصلی فافین
.01
tan
3
2
1
321
=−=
=++=
aaa
dadyadxadfφ
ϕ
این معادله قیدي انتگرال پذیر نیست و بنابراین )غیر هولونومیک(نمی توان آن را به فرم زیر نمایش داد
0),,( =ϕyxg
.قایق دو درجه آزادي دارد اما الزم است از سه مختصه به همراه یک قید استفاده شود

B. Miripour Fard Hamedan University of Technology 10
کار مجازي
. مفهوم کار مجازي یک ابزار بسیار مفید در مکانیک کالسیک است
ن اصل با استفادهای. بار برنولی براي یک سیستم در حالت تعادل استاتیکی بیان کرداصل کار مجازي را اولین
.از اصل داالمبر به دینامیک تعمیم یافت
ات ها مختصتغییرات بسیار کوچک درجابجایی هاي مجازي که ممکن است جابجایی هاي واقعی نباشند،.هستند که با قیود بدون تغییري در زمان هم خوانند

B. Miripour Fard Hamedan University of Technology 11
ذرهkیک سیستم ذرات با بدون قید
درجه آزاديn=3k
2r1r
l

B. Miripour Fard Hamedan University of Technology 12
lتعداد قید هولونومیک
جابجایی هاي مجازي
l
2rδ
1rδ

B. Miripour Fard Hamedan University of Technology 13
مجموعه تمام جابجایی هاي مجازي
موقعیت ذرات
)ر استبرآیند نیروها برابر صف(یک سیستم مقید در حال تعادل
fiو نیروهاي قیدي fiبرآیند نیروهاي خارجیFiنیرويa است

B. Miripour Fard Hamedan University of Technology 14
عمود بر نیروي قیدي در راستاي بردار وصل کننده دو ذره و(کار انجام شده توسط نیروهاي قیدي صفر است )جهت جابجایی است
:داین معادله اصل کار مجازي را بیان می کن. معادله فوق فقط شامل نیروهاي خارجی است
کار انجام شده توسط نیروهاي مجازي مربوط به هر مجموعه از جابجایی هاي مجازي صفر: اصل کار مجازي. است

B. Miripour Fard Hamedan University of Technology 15
.اصل کار مجازي زمانی کاربرد دارد که نیروي قیدي در راستاي بردار وصل کننده ذرات باشد.در جسم صلب این شرایط برقرار است
اصل داالمبر
ه گرفت نیروها در معادله فوق جابجایی ها مستقل نیستند و بنابراین نمی توان نتیج.ن نتیجه اي بگیریمباید از مختصات تعمیم یافته استفاده کنیم تا چنی. برابر صفرند
: براي سیستمهایی که لزوما در حال تعادل نیستند می توان با استفاده از اصل داالمبر نوشت
Pi اندازه حرکت ذرهiر می خواهیم معادله فوق را ب. در معادله فوق هم جابجایی ها مستقل نیستند. ام استاساس مختصات تعمیم یافته اي نشان دهیم که مستقل هستند

B. Miripour Fard Hamedan University of Technology 16
هجابجایی هاي مجازي مختصات تعمیم یافت
نیروي تعمیم یافته

B. Miripour Fard Hamedan University of Technology 17
B. Miripour Fard Hamedan University of Technology 18

B. Miripour Fard Hamedan University of Technology 19

B. Miripour Fard Hamedan University of Technology 20
اصل از اگر نیروي تعمیم یافته مجموع یک نیروي تعمیم یافته خارجی وارد شده بر جسم و نیروي ح:میدان پتانسیل باشد
.ورداصل هامیلتون هم می توان به دست آاین معادالت را با استفاده از

B. Miripour Fard Hamedan University of Technology 21
انرژي جنبشی و پتانسیل

B. Miripour Fard Hamedan University of Technology 22
تانسور اینرسیسرعت و سرعت زاویه اي در مختصات اینرسی
باید تانسور اینرسی هم در مختصات اینرسی بیان شود تا حاصلضرب روبرو محاسبه شود
تانسور اینرسی در مختصات اینرسی

B. Miripour Fard Hamedan University of Technology 23
چگالیتانسور اینرسی هم در مختصات متصل به بدنه

B. Miripour Fard Hamedan University of Technology 24

B. Miripour Fard Hamedan University of Technology 25
لینکnانرژي جنبشی ربات با
Iiام و در مرکز جرم قرار دارد برابر است با iممان اینرسی نسبت به دستگاهی که موازي دستگاه
Dبراي هر بازویی این ماتریس متقارن و مثبت معین است. ماتریس اینرسی است.

B. Miripour Fard Hamedan University of Technology 26
لینکnانرژي پتانسیل ربات با
انسیل با فرض اینکه جرم کل جسم در مرکز آن متمرکز باشد، انرژي پتامiلینک

B. Miripour Fard Hamedan University of Technology 27
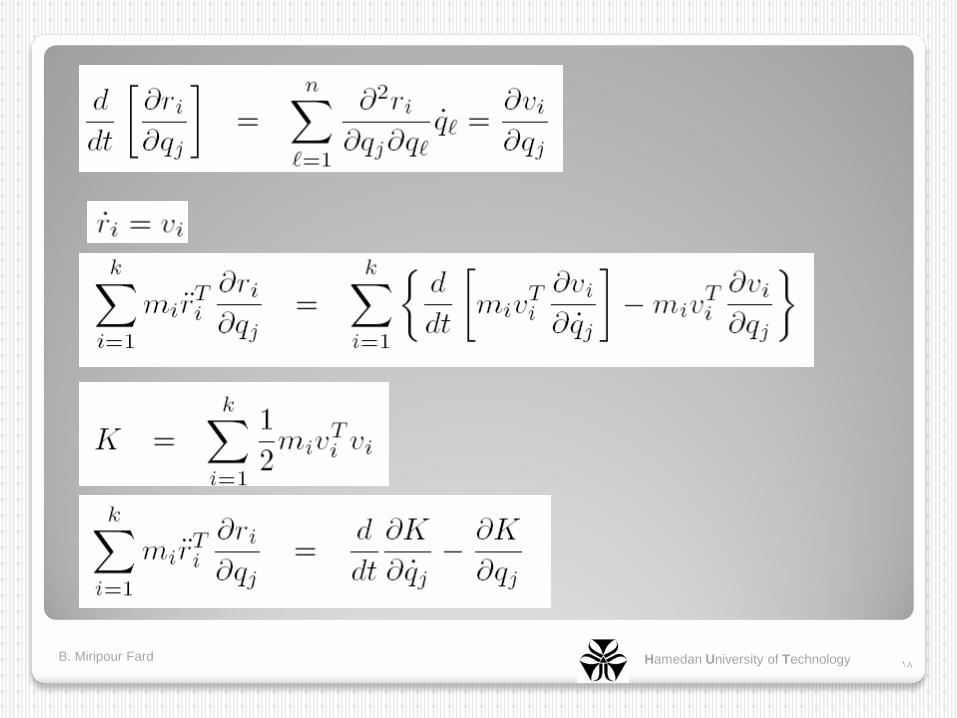
معادالت حرکت
الگرانژ در حالت خاص با دو شرط زیر-معادالت اویلرانرژي جنبشی تابعی درجه دوم از بردار سرعت مفصلی•انرژي پتانسیل مستقل از سرعت مفصلی•

B. Miripour Fard Hamedan University of Technology 28

B. Miripour Fard Hamedan University of Technology 29
با تعویض جمع و استفاده از خاصیت تقارن
)نوع یک(نمادهاي کریستوفل

B. Miripour Fard Hamedan University of Technology 30
∑ ∑∑= = =
==++n
j
n
i
n
jkkjiijkjkj nkqgqqqcqqd
1 1 1
,,1,)()()( τ
به فرم ماتریسی
B. Miripour Fard Hamedan University of Technology 31
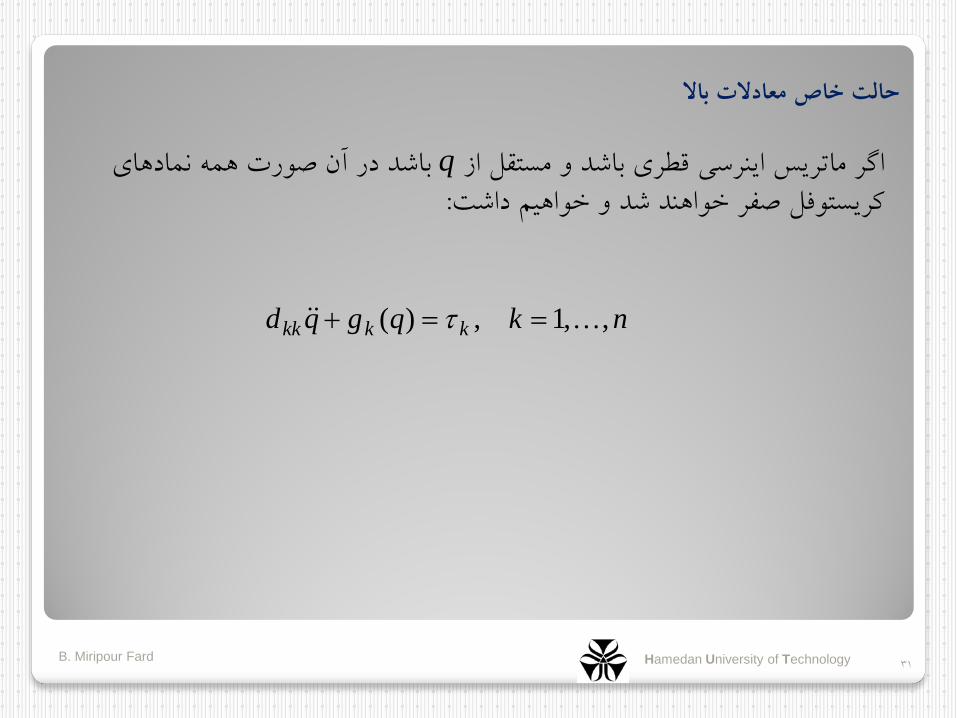
حالت خاص معادالت باال
باشد در آن صورت همه نمادهاي qاگر ماتریس اینرسی قطري باشد و مستقل از :کریستوفل صفر خواهند شد و خواهیم داشت
nkqgqd kkkk ,,1,)( ==+ τ

B. Miripour Fard Hamedan University of Technology 32
بازوي کارتزین: مثال

B. Miripour Fard Hamedan University of Technology 33

B. Miripour Fard Hamedan University of Technology 34
2Rبازوي : مثال
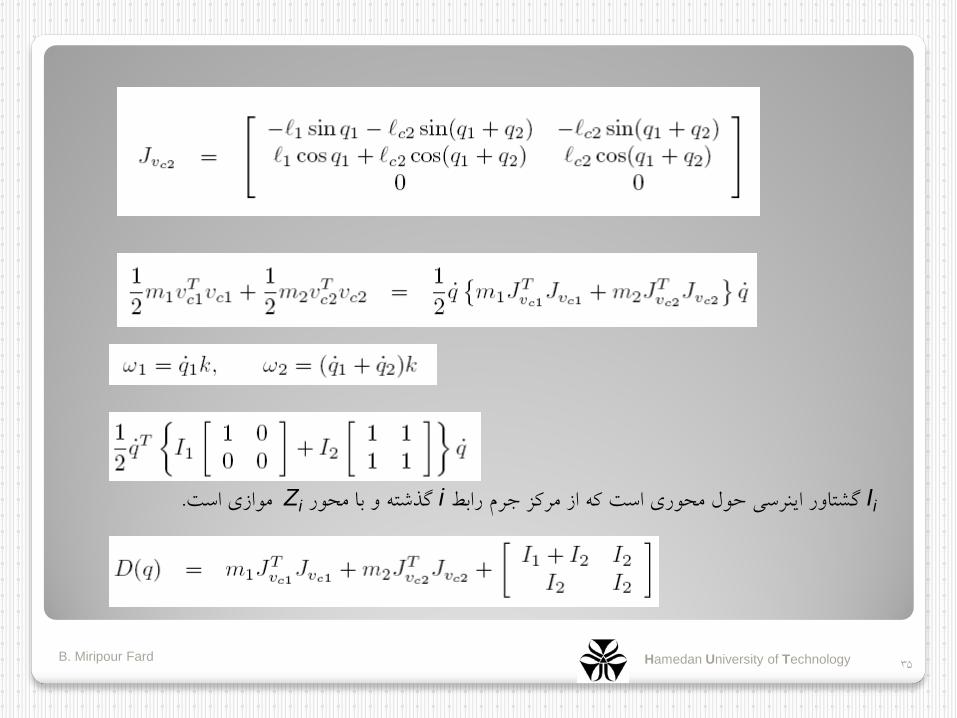
B. Miripour Fard Hamedan University of Technology 35
Ii گشتاور اینرسی حول محوري است که از مرکز جرم رابطi گذشته و با محورZiموازي است.

B. Miripour Fard Hamedan University of Technology 36

B. Miripour Fard Hamedan University of Technology 37

B. Miripour Fard Hamedan University of Technology 38
صفحه اي با رابط هاي کنترل شونده با تسمه2Rبازوي ماهر مکانیکی : مثال
.متغیرهاي مفصلی مختصات تعمیم یافته نیستند.موتور دوم توسط یک تسمه و یا چرخدنده می چرخد.هر دو موتور بر روي پایه است
:نتیجه.در این مدل نیروهاي کوریولیس در معادالت حذف می شوند اما نیروهاي گریز از مزکز وجود دارند
B. Miripour Fard Hamedan University of Technology 39
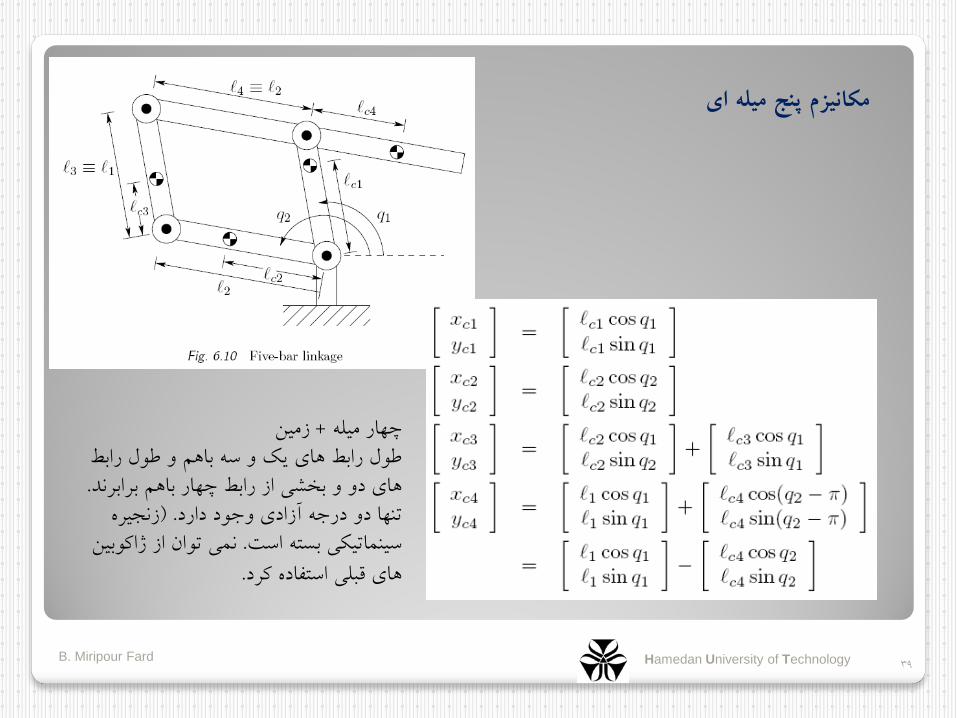
مکانیزم پنج میله اي
زمین+ چهار میله طول رابط هاي یک و سه باهم و طول رابط
.دهاي دو و بخشی از رابط چهار باهم برابرنزنجیره . (تنها دو درجه آزادي وجود دارد
ژاکوبین نمی توان از. سینماتیکی بسته است.هاي قبلی استفاده کرد

B. Miripour Fard Hamedan University of Technology 40

B. Miripour Fard Hamedan University of Technology 41
)به دلیل وجود رابطه ساده بین پارامترهاي بازو(دي کوپله •.به همین دلیل ساختارهاي متوازي االضالع در ربات هاي صنعتی محبوبند•

B. Miripour Fard Hamedan University of Technology 42
خواص معادالت دینامیک ربات)کاربرد در کنترل(
خاصیت پاد تقارنی:قضیهبر حسب Cماتریس اینرسی باشد و ماتریس D(q)اگر
بر اساس معادله زیر تعریف شودD(q)مولفه هاي
ماتریس زیر پادمتقارن خواهد بود),(2)(),( qqCqDqqN −=
اثبات در کتاب

B. Miripour Fard Hamedan University of Technology 43
خاصیت پسیو بودن.میزان انرژي تولید شده توسط سیستم یک حد پایینی دارد
.یک سیستم مکانیکی پسیو از جرم، فنر و میراکننده ساخته می شود
کران هاي ماتریس اینرسی
. ستندبنابراین مقادیر ویژه آن هم مثبت ه. لینکی متقارن و مثبت معین استnماتریس اینرسی یک ربات صلب بنابراین
)کتاب(خطی بودن پارامترها

B. Miripour Fard Hamedan University of Technology 44
اویلر-روش نیوتنجواب نهایی همانند روش الگرانژ است
کدام روش بهتر است؟)امروزه در بسیاري جنبه ها دو فرموالسیون یکسانند(
),,( qqqf =τ
?)2(?,,)1(
==
τqqq در این حالت روش الگرانژ بهتر است
شکل بسته معادالت

B. Miripour Fard Hamedan University of Technology 45

B. Miripour Fard Hamedan University of Technology 46

B. Miripour Fard Hamedan University of Technology 47
معادالت در چارچوب متصل به جسم

B. Miripour Fard Hamedan University of Technology 48
Gyroscopic term
اندازه حرکت زاویه اي در چارچوب اینرسی
:این ترم در اثر محاسبات زیر ظاهر می شود

B. Miripour Fard Hamedan University of Technology 49
خاصیت ماتریس پادمتقارن

B. Miripour Fard Hamedan University of Technology 50
امiنیروها و گشتاورها روي لینک
لینکnفرموالسیون نیوتن و اویلر براي بازوي ماهر با .متصل استiدقیقا به رابط iچارچوب

B. Miripour Fard Hamedan University of Technology 51
امiنیروها و گشتاورها روي لینک
𝑅𝑅𝑖𝑖+1𝑖𝑖

B. Miripour Fard Hamedan University of Technology 52

B. Miripour Fard Hamedan University of Technology 53

B. Miripour Fard Hamedan University of Technology 54
B. Miripour Fard Hamedan University of Technology 55

B. Miripour Fard Hamedan University of Technology 56
تکرار خارجی

B. Miripour Fard Hamedan University of Technology 57
تکرار داخلی

B. Miripour Fard Hamedan University of Technology 58
مثال

B. Miripour Fard Hamedan University of Technology 59

B. Miripour Fard Hamedan University of Technology 60

B. Miripour Fard Hamedan University of Technology 61

B. Miripour Fard Hamedan University of Technology 62

B. Miripour Fard Hamedan University of Technology 63

B. Miripour Fard Hamedan University of Technology 64

B. Miripour Fard Hamedan University of Technology 65